Уровень техники
Объект изобретения, раскрытый в этом описании изобретения, относится к способу и соответствующей системе, а также запоминающему устройству для хранения программ и компьютерной программе для интерактивной автоматической обработки моделирования разломов и, в частности, к способу для интеллектуального распознавания взаимосвязей разлом-разлом в качестве части последовательности операций интерпретации разлома.
Когда компьютеры являются предпочтительным средством получения характеристик залежей нефти и газа с целью бурения стволов скважин или принятия других решений, необходимых для разработки месторождения, интерактивная автоматическая обработка моделирования разломов упрощает традиционно затруднительный процесс формирования инфраструктур разломов. Структура месторождения (то есть горизонты, разломы, геологические группы) является центральной для моделирования месторождения. Это описание изобретения раскрывает способ для интерактивной автоматической обработки моделирования разломов, имеющий отношение к усовершенствованиям или улучшениям в способе, которым моделируются структуры разломов в пласте, в качестве встроенной части интерпретации разлома. Следующие патенты США включены в материалы настоящей заявки посредством ссылки: (1) Патент 5982707 США на Аббота, озаглавленный «Method and Apparatus for Determining Geologic Relationships for Intersecting Faults» («Способ и устройство для определения геологических взаимосвязей для пересекающихся разломов»), и (2) Патент 6014343 США на Графа и других, озаглавленный «Automatic Non-Artifically Extended Fault Surface Based Horizon Modeling System» («Автоматическая система моделирования основанных на неискусственно расширенных поверхностях разломов горизонтов»).
Сущность изобретения
Один из аспектов настоящего изобретения включает в себя способ для интерактивной автоматической обработки моделирования разломов, содержащий: распознавание взаимосвязи разлом-разлом между парой разломов и отображение финальной модели, которая включает в себя пару разломов, финальная модель иллюстрирует пару разломов в качестве являющихся соединенными.
Дополнительный аспект настоящего изобретения включает в себя запоминающее устройство для хранения программ, читаемое машиной, реально воплощающее программу команд, исполняемых машиной, чтобы выполнять этапы способа для интерактивной автоматической обработки моделирования разломов, этапы способа содержат: распознавание взаимосвязи разлом-разлом между парой разломов и отображение финальной модели, которая включает в себя пару разломов, финальная модель иллюстрирует пару разломов в качестве являющихся соединенными.
Дополнительный аспект настоящего изобретения включает в себя компьютерную программу, приспособленную, чтобы выполняться процессором, компьютерная программа, когда выполняется процессором, проводит последовательность операций для интерактивной автоматической обработки моделирования разломов, последовательность операций содержит: распознавание взаимосвязи разлом-разлом между парой разломов и отображение финальной модели, которая включает в себя пару разломов, финальная модель иллюстрирует пару разломов в качестве являющихся соединенными.
Дополнительный аспект настоящего изобретения включает в себя способ для интеллектуального распознавания взаимосвязей разлом-разлом в качестве части последовательности операций интерпретации разлома, способ содержит: вычисление моделей одного или более разломов, как если бы каждый разлом был не связанным с любым другим разломом; обнаружение условия, при котором данные, ассоциативно связанные с одним разломом, являющимся интерпретируемым, указывают, что разлом близок к одному или более других разломов, один разлом и один или более других разломов являются потенциально связанными разломами; представление одного или более потенциально связанных разломов интерпретатору, интерпретатор подтверждает или опровергает, что взаимосвязь соединения существует между потенциально связанными разломами; и вычисление взаимосвязи соединения между потенциально связанными разломами, в силу этого, формирование финальной модели при условии, что интерпретатор подтверждает, что взаимосвязь соединения существует между потенциально связанными разломами.
Дополнительный аспект настоящего изобретения включает в себя запоминающее устройство для хранения программ, читаемое машиной, реально воплощающее программу команд, исполняемых машиной, чтобы выполнять этапы способа для интеллектуального распознавания взаимосвязей разлом-разлом в качестве части последовательности операций интерпретации разлома, этапы способа содержат: вычисление моделей одного или более разломов, как если бы каждый разлом был не связанным с любым другим разломом; обнаружение условия, при котором данные, ассоциативно связанные с одним разломом, являющимся интерпретируемым, указывают, что разлом близок к одному или более других разломов, один разлом и один или более других разломов являются потенциально связанными разломами; представление одного или более потенциально связанных разломов интерпретатору, интерпретатор подтверждает или опровергает, что взаимосвязь соединения существует между потенциально связанными разломами; и вычисление взаимосвязи соединения между потенциально связанными разломами, в силу этого, формирование финальной модели при условии, что интерпретатор подтверждает, что взаимосвязь соединения существует между потенциально связанными разломами.
Дополнительный аспект настоящего изобретения включает в себя компьютерную программу, приспособленную, чтобы выполняться процессором, компьютерная программа, когда выполняется процессором, выполняет способ для интеллектуального распознавания взаимосвязей разлом-разлом в качестве части последовательности операций интерпретации разлома, способ содержит: вычисление моделей одного или более разломов, как если бы каждый разлом был не связанным с любым другим разломом; обнаружение условия, при котором данные, ассоциативно связанные с одним разломом, являющимся интерпретируемым, указывают, что разлом близок к одному или более других разломов, один разлом и один или более других разломов являются потенциально связанными разломами; представление одного или более потенциально связанных разломов интерпретатору, интерпретатор подтверждает или опровергает, что взаимосвязь соединения существует между потенциально связанными разломами; и вычисление взаимосвязи соединения между потенциально связанными разломами, в силу этого, формирование финальной модели при условии, что интерпретатор подтверждает, что взаимосвязь соединения существует между потенциально связанными разломами.
Дополнительный аспект настоящего изобретения включает в себя систему, выполненную с возможностью интеллектуального распознавания взаимосвязей разлом-разлом в качестве части последовательности операций интерпретации разлома, система содержит: первое устройство, выполненное с возможностью вычисления моделей одного или более разломов, как если бы каждый разлом был не связанным с любым другим разломом; второе устройство, выполненное с возможностью обнаружения условия, при котором данные, ассоциативно связанные с одним разломом, являющимся интерпретируемым, указывают, что разлом близок к одному или более других разломов, один разлом и один или более других разломов являются потенциально связанными разломами; третье устройство, выполненное с возможностью представления одного или более потенциально связанных разломов интерпретатору, интерпретатор подтверждает или опровергает, что взаимосвязь соединения существует между потенциально связанными разломами; и четвертое устройство, выполненное с возможностью вычисления взаимосвязи соединения между потенциально связанными разломами, в силу этого, формирования финальной модели при условии, что интерпретатор подтверждает, что взаимосвязь соединения существует между потенциально связанными разломами.
Дополнительный аспект настоящего изобретения включает в себя систему, выполненную с возможностью интерактивной автоматической обработки моделирования разломов, содержащую: первое устройство, выполненное с возможностью распознавания взаимосвязи разлом-разлом между парой разломов; и второе устройство, выполненное с возможностью отображения финальной модели, которая включает в себя пару разломов, финальная модель иллюстрирует пару разломов в качестве являющихся соединенными.
Дополнительный аспект настоящего изобретения включает в себя способ для распознавания взаимосвязей разлом-разлом, содержащий: автоматическое распознавание взаимосвязей между разломами и представление финальной модели, включающей в себя кривую пересечения разлом-разлом и один разлом, усеченный по кривой, интерпретатору с отображением взаимосвязей между разломами.
Дополнительный аспект настоящего изобретения включает в себя компьютерную программу, приспособленную, чтобы выполняться процессором, компьютерная программа, когда выполняется процессором, проводит последовательность операций для распознавания взаимосвязей разлом-разлом, последовательность операций содержит: автоматическое распознавание взаимосвязей между разломами и представление финальной модели, включающей в себя кривую пересечения разлом-разлом и один разлом, усеченный по кривой, интерпретатору с отображением взаимосвязей между разломами.
Дополнительный аспект настоящего изобретения включает в себя запоминающее устройство для хранения программ, читаемое машиной, реально воплощающее набор команд, исполняемых машиной, чтобы выполнять этапы способа для распознавания взаимосвязей разлом-разлом, этапы способа содержат: автоматическое распознавание взаимосвязей между разломами и представление финальной модели, включающей в себя кривую пересечения разлом-разлом и один разлом, усеченный по кривой, интерпретатору с отображением взаимосвязей между разломами.
Дополнительный аспект настоящего изобретения включает в себя систему, выполненную с возможностью распознавания взаимосвязей разлом-разлом, содержащую: устройство, выполненное с возможностью автоматического распознавания взаимосвязей между разломами, и устройство, выполненное с возможностью для представления финальной модели, включающей в себя кривую пересечения разлом-разлом и один разлом, усеченный по кривой, интерпретатору с отображением взаимосвязей между разломами.
Дополнительный объем применимости станет очевидным из подробного описания, представленного в дальнейшем. Однако должно быть понятно, что подробное описание и отдельные примеры, изложенные ниже, приведены только в качестве иллюстрации, поскольку различные изменения и модификации в пределах сущности и объема Программного обеспечения моделирования разломов, которое описано и заявлено формулой изобретения в этом описании изобретения, станут очевидны специалисту в данной области техники из прочтения последующего подробного описания.
Краткое описание чертежей
Полное понимание будет получено из подробного описания, представленного ниже, и прилагаемых чертежей, которые приведены только в качестве иллюстрации и не подразумеваются ограничивающими ни до какой степени и на которых:
фиг.1 иллюстрирует рабочую станцию или другую компьютерную систему, которая хранит комплект программного обеспечения, известный как Программное обеспечение моделирования разломов;
фиг.2 и 3 иллюстрируют структурную схему, описывающую первый вариант (A) осуществления функции, осуществляемой на практике Программным обеспечением моделирования разломов по фиг.1;
фиг.4 и 5 иллюстрируют структурную схему, описывающую второй вариант (B) осуществления функции, осуществляемой на практике Программным обеспечением моделирования разломов по фиг.1;
фиг.6 иллюстрирует один из примеров структурной модели горизонтов и разломов в иссеченном разломами земном пласте;
фиг.7 иллюстрирует вид сверху горизонта 82b на фиг.6, взятый вдоль линии 7-7 сечения по фиг.6;
фиг.8 иллюстрирует сеть, полностью составленную из разломов;
фиг.9 и 11-13 изображают различные иллюстрации взаимосвязей разломов, применяемых или неприменяемых;
фиг.10 иллюстрирует данные интерпретации разлома, также известные как срезы разломов, двух разломов;
фиг.14 иллюстрирует, каким образом выглядела бы граница (замкнутый профиль гребня) разлома, когда моделируется не связанной с любым другим разломом;
фиг.15 описывает этапы обработки, используемые для обнаружения наличия другого разлома возле интерпретируемого, фиг.15 (включающая в себя множество этапов, относящихся к Обнаружению близости разломов) является подробным объяснением этапа 20 близости по фиг.2, фиг.15 также является подробным объяснением этапа 21 близости по фиг.4;
фиг.16 иллюстрирует набор точек (расположенных по центру на фигуре), которые расположены приближенными к самому правому усекающему разлому; и
фиг.17 иллюстрирует, что после того как интерпретатор подтверждает, что взаимосвязь разлом-разлом действительна, моделируется пересечение двух разломов, как указано самой длинной линией, которая показана на фиг.17;
фиг.18 описывает этапы обработки, используемые для проецирования интерпретированного разлома на ближайший разлом и вычисления общей Кривой пересечения разлом-разлом, фиг.18 является подробным объяснением этапа 28 на фиг.3, фиг.18 также является подробным объяснением этапа 31 по фиг.5;
фиг.19 иллюстрирует финальную модель двух связанных разломов, где один разлом смоделирован вплоть до и заканчивается на общем пересечении с другим разломом;
фиг.20 и 21 иллюстрируют основное назначение вышеупомянутого способа для моделирования разломов, проиллюстрированного на фиг.2 и 3, а также на фиг.4 и 5; то есть для извлечения нефти и/или газа из земного пласта, фиг.20 иллюстрирует характеристики земного пласта, в том числе место в земном пласте, в котором расположены нефть и/или газ, фиг.21 иллюстрирует буровую установку, которая размещена над таким местом в земном пласте, буровая установка используется для извлечения нефти и/или газа из места в земном пласте по фиг.20;
фиг.22 и 23 иллюстрируют способ для формирования выходной записи каротажной диаграммы;
фиг.24, 25 и 26 иллюстрируют способ для формирования выходной записи приведенных сейсмических данных; и
фиг.27 иллюстрирует, каким образом выходная запись каротажной диаграммы по фиг.23 и выходная запись приведенных сейсмических данных по фиг.26 вместе и в комбинации отображают входные данные 15, которые вводятся в компьютерную систему 10 по фиг.1.
Подробное описание
Это описание изобретения раскрывает концепцию, известную как интерактивная автоматическая обработка моделирования разломов, которая является последовательностью операций, которая выполняется в качестве части интерпретации разлома в связи с разведкой месторождений и добычей нефти и/или газа. Интерактивная автоматическая обработка моделирования разломов упрощает традиционно затруднительный процесс формирования инфраструктур разломов. Во время интерпретации применяются фоновые процессы моделирования, которые представляют автоматически распознаваемые взаимосвязи между разломами. Эти фоновые процессы (позже вновь обсужденные в этом описании изобретения) автоматически формируют поверхности разломов во время интерпретации и обнаруживают их относительную близость. Примером автоматического распознавания взаимосвязей между разломами было бы: каким образом один разлом должен усекать другой разлом. Интерпретатор подтверждает эти взаимосвязи, продолжает процесс интерпретации и предоставляется инфраструктура моделей взаимосвязанных разломов, которая сообщает дополнительную ценность процессу интерпретации разлома.
Последовательность операций интерактивной автоматической обработки моделирования разломов и, в частности, последовательность операций автоматически распознаваемой взаимосвязи между разломами полезны, когда компьютеры представляют собой предпочтительное средство для получения характеристик залежей нефти и газа для бурения стволов скважин и для других решений, которым необходимо приниматься в связи с разработкой залежей во время разведки месторождений и добычи нефти и/или газа. Структура залежи, которая определена компоновкой горизонтов, разломов и геологических групп, служит в качестве основы для моделирования месторождения. Как результат, это писание изобретения раскрывает дополнительные улучшения и усовершенствования в способе, посредством которого инфраструктуры разломов моделируются в качестве встроенной части последовательности операций интерпретации разлома.
Следовательно, в этом описании изобретения связанная сеть разломов моделируется в качестве части последовательности операций поточной обработки интерпретации разлома посредством: (1) автоматического распознавания взаимосвязей между разломами; например, одной из взаимосвязей среди разломов была бы: каким образом один разлом должен осуществлять усечение по отношению к другому разлому, и (2) представления пользователю/оператору взаимосвязей между разломами в качестве неотъемлемой части последовательности операций интерпретации. Эта интерактивная автоматическая обработка моделирования разломов считается интерактивным и динамическим процессом при условии, что он приветствует итерационную сущность интерпретации разлома. Функциональная возможность спроектирована минимально навязчивой по отношению к интерпретатору. В свою очередь, интерпретатору предоставлена возможность сосредотачиваться скорее на геологическом строении разлома, чем на процессе построения модели. Однако в любом случае в результате последовательности операций интерактивной автоматической обработки моделирования разломов создается модель, которая сообщает дополнительную ценность процессу интерпретации разлома.
Последовательность операций интерактивной автоматической обработки моделирования разломов, описанная в этом описании изобретения, реально формулирует «способ для интеллектуального распознавания (то есть интеллектуального восприятия) взаимосвязей разлом-разлом», который выполняется со скоростями интерактивного ответа.
Вышеупомянутая последовательность операций интерактивной автоматической обработки моделирования разломов, которая выполняет и осуществляет на практике способ для интеллектуального распознавания (то есть интеллектуального восприятия) взаимосвязей разлом-разлом, в соответствии с первым вариантом осуществления (как указанный фиг.2 и 3), достигается посредством: (a) вычисления моделей каждого разлома, как будто бы каждый был не связанным с любым другим разломом, (b) сохранения (несвязанных) моделей современными по мере того, как создаются новые данные интерпретации, (c) обнаружения условия, в соответствии с которым данные одного разлома (являющегося интерпретируемым) близки к одному или более других разломов (смотрите фиг.15 для подробного объяснения обнаружения близости разлома, при котором один разлом определяется близким к одному или более других разломов), (d) представления во временном рабочем окне или мерцания на устройстве отображения кривой пересечения разлом-разлом одного или более потенциально связанных разломов интерпретатору, с тем чтобы интерпретатор затем мог подтверждать или опровергать, что взаимосвязь соединения действительна, (e) регистрации ответа от интерпретатора и, если взаимосвязь подтверждена интерпретатором, вычисления свойств взаимосвязи соединения, (f) добавления определенных свойств типа пересечения в качестве новых интерпретаций к разлому, которые вводят взаимосвязь с данными интерпретации, (g) необязательного вычисления и отображения связанной модели для иллюстрации разломов в качестве соединенных (то есть пересекающихся).
Примеры моделирования разломов и горизонтов могут быть найдены в: (1) патенте 6014343 США на Графа и других, (2) патенте 6138076 США на Графа и других и (3) патенте 5982707 США на Аббота, раскрытия которых включены в описание изобретения по этой заявке посредством ссылки.
Со ссылкой на фиг.1 проиллюстрирована рабочая станция или другая компьютерная система, которая хранит Программное обеспечение моделирования разломов, которое выполняет или осуществляет на практике вышеупомянутую последовательность операций интерактивной автоматической обработки моделирования разломов, где последовательность операций интерактивной автоматической обработки моделирования разломов выполняет и осуществляет на практике способ для интеллектуального распознавания (то есть интеллектуального восприятия) взаимосвязей разлом-разлом.
На фиг.1 проиллюстрирована рабочая станция, персональный компьютер или другая компьютерная система 10, приспособленная для хранения Программного обеспечения моделирования разломов. Компьютерная система 10 по фиг.1 включает в себя процессор 10a, оперативно присоединенный к системной шине 10b, память или другое запоминающее устройство 10c для хранения программ, оперативно присоединенные к системной шине 10b, и устройство 10d регистратора или отображения, оперативно присоединенное к системной шине 10b. Память или другое запоминающее устройство 10c для хранения программ, которые хранят Программное обеспечение моделирования разломов 12, которое осуществляет на практике последовательность операций интерактивной автоматической обработки моделирования разломов, где последовательность операций интерактивной автоматической обработки моделирования разломов выполняет и осуществляет на практике способ для интеллектуального распознавания (то есть интеллектуального восприятия) взаимосвязей разлом-разлом.
Программное обеспечение моделирования разломов 12, которое хранится в памяти 10c компьютерной системы 10 по фиг.1, изначально может храниться на CD-ROM 14 (ПЗУ на компакт-диске), где такой CD-ROM 14 также является запоминающим устройством для хранения программ. Такой CD-ROM 14 может вставляться в компьютерную систему 10, и Программное обеспечение моделирования разломов 12 может загружаться с такого CD-ROM 14 и в память/запоминающее устройство 10c для хранения программ компьютерной системы 10 по фиг.1. Компьютерная система 10 по фиг.1 восприимчива к определенным входным данным 13, входные данные 13 подробно обсуждаются в более поздних разделах этого описания изобретения. Процессор 10a компьютерной системы 10 будет выполнять Программное обеспечение моделирования разломов 12, которое хранится в памяти 10c по фиг.1, в ответ на входные данные 13; и чувствительный к ним процессор 10a будет формировать выходное отображение, которое регистрируется или отображается на устройстве 10d регистратора или отображения по фиг.1. Компьютерная система 10 по фиг.1 может быть персональным компьютером (ПК, PC), рабочей станцией, микропроцессором или универсальной вычислительной машиной. Примеры возможных рабочих станций включают в себя рабочую станцию Dell Precision M90 или рабочую станцию HP Pavilion либо рабочую станцию Sun ULTRA или рабочую станцию Sun BLADE. Память или запоминающее устройство 10c для хранения программ (в том числе упомянутый выше CD-ROM 14) является машинно-читаемым носителем или запоминающим устройством для хранения программ, которое читаемо машиной, такой как процессор 10a. Процессором 10a, например, может быть микропроцессор, микроконтроллер либо процессор универсальной вычислительной машины или рабочей станции. Память или запоминающее устройство 10c и 14 для хранения программ, которые хранят Программное обеспечение моделирования разломов 12, например, могут быть жестким диском, ПЗУ (постоянным запоминающим устройством, ROM, CD-ROM, динамическим ОЗУ (динамическим оперативным запоминающим устройством, DRAM), или другим ОЗУ, флэш-памятью, магнитным запоминающим устройством, оптическим запоминающим устройством, регистрами или другой энергозависимой и/или энергонезависимой памятью.
Со ссылкой на фиг.2 и 3 проиллюстрирована структурная схема, описывающая функцию, осуществляемую на практике первым вариантом осуществления Программного обеспечения моделирования разломов 12, по фиг.1.
На фиг.2 и 3 первый вариант осуществления Программного обеспечения моделирования разломов 12 осуществляет на практике последовательность операций интерактивной автоматической обработки моделирования разломов, а последовательность операций интерактивной автоматической обработки моделирования разломов выполняет и осуществляет на практике Способ для интеллектуального распознавания (то есть интеллектуального восприятия) взаимосвязей разлом-разлом посредством выполнения или осуществления на практике следующих этапов:
(1) вычисления моделей каждого разлома, как будто бы каждый разлом был не связанным с любым другим разломом, этапа 16 по фиг.2,
(2) сохранения несвязанных моделей каждого разлома современными по мере того, как создаются новые данные интерпретации, этапа 18 по фиг.2,
(3) обнаружения условия, в соответствии с которым данные, ассоциативно связанные с одним разломом (то есть разломом, являющимся интерпретируемым), указывают, что разлом, являющийся интерпретируемым, близок к одному или более других разломов, этапа 20 по фиг.2 (смотрите фиг.15 для обнаружения близости разлома),
(4) представления во временном рабочем окне одного или более потенциально связанных разломов интерпретатору, интерпретатор подтверждает или опровергает в ответе, что взаимосвязь соединения между потенциально связанными разломами действительна, этапа 22 по фиг.2,
(5) регистрации ответа от интерпретатора и, если взаимосвязь соединения подтверждена интерпретатором, вычисления всех свойств взаимосвязи соединения, этапа 24 по фиг.3,
(6) добавления кривой пересечения и других свойств соединения, отображающих новые интерпретации, к разлому, которые вводят взаимосвязь соединения с данными интерпретации, этапа 26 по фиг.3, и
(7) необязательного вычисления и отображения финальной модели для иллюстрации разломов в качестве являющихся соединенными, то есть в качестве являющихся пересекающимися, этапа 28 по фиг.3, где финальная модель также включает в себя финальную кривую пересечения, отдельную от кривой пересечения по этапу (6), которая является данными интерпретации. Все элементы финальной модели являются динамическими, то есть повторно рассчитываются всякий раз, когда изменяется любая часть интерпретации, и это включает в себя финальную кривую пересечения.
Этапы с 16 по 28 по фиг.2 и 3, упомянутые выше, будут обсуждены ниже более подробно со ссылкой на фиг.с 6 по 19 чертежей.
Со ссылкой на фиг.4 и 5 проиллюстрирована структурная схема, описывающая функцию, осуществляемую на практике вторым вариантом осуществления Программного обеспечения моделирования разломов 12 по фиг.1.
На фиг.4 и 5 второй вариант осуществления Программного обеспечения моделирования разломов 12 осуществляет на практике последовательность операций интерактивной автоматической обработки моделирования разломов, а последовательность операций интерактивной автоматической обработки моделирования разломов выполняет и осуществляет на практике Способ для интеллектуального распознавания (то есть интеллектуального восприятия) взаимосвязей разлом-разлом посредством выполнения или осуществления на практике следующих этапов:
(1) вычисления моделей каждого разлома, как будто бы каждый разлом был не связанным с любым другим разломом этапа 17 по фиг.4,
(2) сохранения несвязанных моделей каждого разлома современными по мере того, как создаются новые данные интерпретации, этапа 19 по фиг.4,
(3) обнаружения условия, в соответствии с которым данные, ассоциативно связанные с одним разломом (то есть разломом, являющимся интерпретируемым), указывают, что разлом, являющийся интерпретируемым, близок к одному или более других разломов, этапа 21 по фиг.4 (см. фиг.15 Обнаружения близости разлома),
(4) вычисления свойств взаимосвязи соединения между интерпретируемым разломом и одним или более других разломов, в том числе кривой пересечения разлом-разлом и правила усечения, этапа 23 по фиг.4,
(5) представления кривой пересечения одного или более потенциально связанных разломов интерпретатору, интерпретатор подтверждает или опровергает в ответе, что взаимосвязь соединения между потенциально связанными разломами действительна, этапа 25 по фиг.5,
(6) регистрации ответа от интерпретатора и, если взаимосвязь соединения подтверждена интерпретатором, вычисления оставшихся свойств взаимосвязи соединения, этапа 27 по фиг.5,
(7) добавления кривой пересечения и других свойств соединения, отображающих новые интерпретации, к разлому, которые вводят взаимосвязь соединения с данными интерпретации, этапа 29 по фиг.5, и
(8) необязательного вычисления и отображения финальной модели для иллюстрации разломов в качестве являющихся соединенными, то есть в качестве являющихся пересекающимися, этапа 31 по фиг.5, где финальная модель также включает в себя финальную кривую пересечения, отдельную от кривой пересечения по этапу (6), которая является данными интерпретации. Все элементы финальной модели являются динамическими, то есть повторно рассчитываются всякий раз, когда изменяется любая часть интерпретации, и это включает в себя финальную кривую пересечения.
Этапы с 17 по 31 по фиг.4 и 5, упомянутые выше, будут обсуждены ниже более подробно со ссылкой на фиг. с 6 по 19 чертежей.
Обратимся к фиг.6 и 7. Фиг.6 и 7 относятся к примеру структурной модели, состоящей из горизонтов и разломов. Фиг.6 представляет трехмерное отображение этой модели, причем фиг.7 изображает срезы по глубине (линия 7-7 сечения) на протяжении модели.
На фиг.6 и 7, в начале со ссылкой на фиг.6 как часть фиг.6, проиллюстрирован пример структурной модели разломов и горизонтов 116 месторождения. Модель 116 изрезанных разломами горизонтов по фиг.6 является трехмерным изображением сечения земного пласта, где земной пласт составлен из множества горизонтов, пересеченных множеством разломов. Например, на фиг.6 земной пласт, содержащий некоторое количество горизонтов, пересечен некоторым количеством разломов, и на фиг.6 некоторое количество горизонтов 82a, 82b и 82c соответственно пересекаются количеством разломов 15a, 15b и 15c. На фиг.6 модель 116 изрезанных разломами горизонтов является 3-х мерным изображением земного пласта, показывающим некоторое количество горизонтов 82a, 82b и 82c, которые пересекаются некоторым количеством разломов 15a, 15b и 15c. На фиг.7 проиллюстрирована карта одного из горизонтов 82a, 82b, 82c по фиг.6, термин карта определяется в качестве являющегося видом сверху одного из горизонтов 82a, 82b, 82c на фиг.6. Например, карта, проиллюстрированная на фиг.7, показывает вид сверху горизонта 82a на фиг.6, вид сверху горизонта 82a, просматриваемого вниз на фиг.6 вдоль линий 7-7 сечения по фиг.6. На фиг.7 отметим зоны 15a разломов.
Со ссылкой на фиг.8 проиллюстрирована модель земного пласта, включающая в себя сеть, полностью составленную из разломов.
На фиг.8 в связи с вышеупомянутым Способом для интерактивно автоматической обработки моделирования разломов, включающим в себя Способ для интеллектуального распознавания (то есть интеллектуального восприятия) взаимосвязей разлом-разлом, типичный подход к построению структурной модели состоит в том, чтобы начинать с построения структур разломов. Этап построения структур разломов требует данных интерпретации разлома, которые типично выводятся из сейсмических данных. Последовательность операций разработки структурной модели облегчается конструированием инфраструктуры разломов, в пределах которой интерпретируются горизонты. Фиг.8 иллюстрирует инфраструктуру разломов, полностью составленную из разломов.
Со ссылкой на фиг.10 схема, показанная на фиг.10, иллюстрирует некоторое количество данных интерпретации разлома (также известных как срезы разломов), где данные интерпретации разлома изображают или отображают два разлома. На фиг.10 показано смоделированное изображение каждого из двух разломов, смоделированное изображение в исходном состоянии изображает взаимосвязь соединения между двумя разломами, показанными на фиг.10. Взаимосвязь соединения двух разломов, показанных на фиг.10, демонстрируется одним разломом, пронизывающим другой разлом, тем самым создавая пересечение между двумя разломами. Поэтому при заданной взаимосвязи разлом-разлом, показанной на фиг.10, один из разломов может быть сокращен (то есть усечен или урезан) пересечением, как показано на фиг.10.
Со ссылкой на фиг.9, 11, 12 и 13 различные иллюстрации взаимосвязей разломов, применяемых или неприменяемых, показаны на фиг.9, 11, 12 и 13.
Как часть фиг.9 на фиг.9 показана иллюстрация элементов структуры разломов. На фиг.9 инфраструктура разломов управляет и хранит различные объекты данных, вычисляемые во время последовательности операций построения. Эти объекты включают в себя второстепенные разломы, отсеченные от своих связанных основных разломов, требующие хранения линий пересечения разлом-разлом и всех установленных взаимосвязей разломов. Некоторые из этих элементов показаны на фиг.9.
На фиг.11 и 12 два разлома 34 и 36 могут пересекаться образом, показанным на фиг.11; однако два разлома 30 и 32 также могут пересекаться образом, показанным на фиг.12. На фиг.12 основной разлом 30 пересекается второстепенным разломом 32; однако второстепенный разлом 32 усечен ниже основного разлома 30.
Как часть фиг.13 на фиг.13 показана еще одна другая примерная иллюстрация элементов модели разломов. Основными элементами являются действительная часть, которая аппроксимирует данные срезов разлома, мнимая или экстраполированная часть и граница разлома, которая является поверхностью раздела между действительной и мнимой. Граница также называется замкнутым профилем гребня.
Программное обеспечение моделирования разломов 12 по фиг.1, которое осуществляет на практике последовательность операции Интерактивной автоматической обработки моделирования разломов, в том числе Способ для интеллектуального распознавания (то есть интеллектуального восприятия) взаимосвязей разлом-разлом, формально известно как Служба моделирования разломов, Служба моделирования разломов является включенной в технологический процесс интерпретации разломов.
Для того чтобы активировать (или деактивировать) Службу моделировании разломов, ассоциативно связанную с Программным обеспечением моделирования разломов 12 по фиг.1, будет использоваться диалог настройки, диалог настройки отображается на Устройстве 10d регистратора или отображения по фиг.1.
Диалог настройки включает в себя следующую информацию:
(1). Инфраструктурное моделирование разломов - переключатель включения/выключения, который активирует моделирование разломов наряду с интерпретацией и последовательностью операций интеллектуального восприятия разломов. Когда переключен во включенное состояние, могут задаваться параметры для управления службой моделирования разломов.
(2). Расстояние соединения разлом-разлом, по умолчанию - 200, регулирует чувствительность к интеллектуальному восприятию других разломов возле интерпретируемого разлома. Подобным образом оно также регулирует расстояние, на котором экстраполируется интерпретируемый разлом для соединения и формирования пересечения с ближайшим разломом.
(3). Сглаживание разлома, по умолчанию - 2, регулирует количество проходов сглаживания при моделировании разлома.
(4). Стиль замкнутого профиля гребня разлома, по умолчанию - изотропная экстраполяция управляет общей формой замкнутого профиля гребня. Варианты выбора включают в себя:
изотропную экстраполяцию - экстраполирует разлом одинаково во всех направлениях;
анизотропную экстраполяцию - экстраполирует разлом в горизонтальном направлении без вертикальной экстраполяции;
скульптурную - оберточную аппроксимацию по данным интерпретации.
(5). Показатель качества замкнутого профиля гребня разлома, по умолчанию - 1, управляет качеством детализации замкнутого профиля гребня, колеблющимся в пределах от хорошего (1), улучшенного (2), наилучшего (4).
(6). Расстояние экстраполяции разлома, по умолчанию - 50, управляет экстраполяцией модели за пределами ее данных. Используется только для стилей изотропной экстраполяции и анизотропной экстраполяции замкнутого профиля гребня.
(7). Диаметр скульптурного формования замкнутого профиля гребня разлома, по умолчанию - 400, регулирует степень, до которой замкнутые профили гребня осуществляют скульптурное формование между граничными измерительными точками. Это задает размер (диаметр) шарового элемента, прокатывающегося по границе данных, профилирующей расположение замкнутого профиля гребня, чем меньше диаметр, тем больше шаровой элемент (замкнутый профиль гребня) осуществляет скульптурное формование между измерительными точками.
Кроме переключателя включения/выключения Инфраструктурного моделирования разломов, все из этих параметров могут устанавливаться индивидуально для каждого разлома. Диалог настройки задает глобальные значения по умолчанию. Эти настройки затем используются и копируются в качестве значений по умолчанию для моделирования разломов, когда разлом моделируется в первый раз.
Выбор значений по умолчанию с целью интерпретации и моделирования в инфраструктуре является динамическим процессом. Интерпретатор может решить включить в состав разлом для моделирования, затем интерпретатор может исключить разлом. Например, если интерпретатор решает, что разлом несущественен для рассматриваемой задачи, интерпретатор может исключить разлом; однако интерпретатор также может решить вновь добавить разлом обратно и продолжить интерпретацию/моделирование. Подобным образом пользователь может модифицировать/редактировать существующий разлом по мере того, как его/ее интерпретация созревает.
Термин Расстояние соединения разлом-разлом (упоминаемый ниже) является расстоянием, используемым в Способе для интерактивной автоматической обработки моделирования разломов, включающем в себя Способ для интеллектуального распознавания (то есть интеллектуального восприятия) взаимосвязей разлом-разлом, раскрытом в этом описании изобретения. В частности, термин Расстояние соединения разлом-разлом используется для того, чтобы распознавать в начальной стадии, что два разлома близки; и, когда два разлома определены близкими, два разлома могут быть связаны. Если два разлома связаны, два разлома затем могут быть соединены во взаимосвязь разлом-разлом. Смотрите фиг.15 касательно некоторого количества этапов, влекущих за собой Обнаружение близости разломов, при котором в соответствии с этапами по фиг.15 два разлома могут определяться близкими друг к другу или ближайшими друг к другу либо находящимися поблизости друг от друга.
Во время интерпретации, когда Инфраструктурное моделирование разломов активно, интеллектуальное восприятие разломов будет использовать всплывающий стиль ведения диалога или будет подсвечивать мерцанием кривую пересечения разлом-разлом на устройстве отображения в качестве способа уведомления интерпретатора о решениях, принятых алгоритмами моделирования в отношении Обнаружения близости разломов, затем предоставляя возможность подтверждения или опровержения интерпретатором. Программное обеспечение моделирования осведомлено о полном наборе разломов, подвергшихся интерпретации или частично интерпретированных, в то время как интерпретатор сосредоточен на одном или нескольких разломах за раз. Интерпретация прерывается, когда моделирование интеллектуального восприятия разломов обнаруживает другие один или более разломов поблизости от разлома, являющегося интерпретируемым. Всплывающий диалог перечисляет разломы в пределах параметризованного расстояния (то есть в пределах Расстояния соединения разлом-разлом) или они выводятся посредством мерцающей подсветки кривых пересечения на устройстве отображения. Интерпретатор принимает или отклоняет каждую потенциальную взаимосвязь, затем продолжает интерпретацию. Принятие или отклонение выполняются посредством диалогового взаимодействия или взаимодействия с графической канвой, или обоих. Каждое решение сохраняется в памяти Программным обеспечением моделирования разломов 12. Решение отклонения, по умолчанию, предохраняет любое повторное появление прежней пары разломов от показывания интерпретатору вновь, хотя, если необходимо, это решение позже может отменяться. Однако решение принятия заставляет рассчитываться правила усечения и отображает финальную (усеченную) модель. Интеллектуальное восприятие (выполняемое и осуществляемое на практике Программным обеспечением моделирования разломов 12) работает с интерактивной скоростью, а усечение работает на почти интерактивных скоростях.
Финальная модель также включает в себя финальную кривую пересечения, которая обособлена от кривой пересечения, вычисленной и отображенной ранее, которая является данными интерпретации. Все элементы финальной модели являются динамическими, то есть повторно рассчитываются всякий раз, когда изменяется любая часть интерпретации, и это включает в себя финальную кривую пересечения.
Далее обратимся к фиг.14.
Фиг.14 иллюстрирует, каким образом выглядела бы граница (замкнутый профиль гребня) разлома, смоделированная не связанной ни с каким другим разломом, которая фактически является моделью интерпретации по умолчанию. Эта модель непрерывно обновляется по мере того, как добавляются интерпретации. На фиг.14 интерпретации, которые добавлены, изображены линиями 40 на фиг.11.
Когда разлом смоделирован не связанным с любым другим разломом, этап 16 по фиг.2 и этап 17 по фиг.4, следующие элементы включены в состав и дают возможность интерактивного выполнения технологического процесса интеллектуального восприятия разломов:
1. Оптимальная модель разлома - модель разлома в некоторой оптимальной системе координат, отличаемая для обеспечения баланса между производительностью и точностью в расчетах интеллектуального восприятия разломов; также может назваться пространством модели разлома. Одним из таких оптимальных пространств является так называемая декартова система координат плоскости оптимального приближения, ориентированная таким образом, что координатная плоскость X-Y параллельна общему направлению развития по данным разлома. Ось аппликат в таком случае может браться в качестве средней нормали к разлому. Ключевой расчет в интеллектуальном восприятии разлома состоит в том, чтобы быстро измерять, некоторым приближенным образом, расстояние от произвольной 3-х мерной точки, то есть точки P (x, y, z) интерпретации, до разлома, представленного в качестве некоторой функции, F(x, y). В этом расчете требуется направление, перпендикулярное разлому. С использованием типа плоскости оптимального приближения оптимальной модели разлома нормальное направление приближенно выражается в качестве направления оси аппликат, так что расчет расстояния d является простым вычитанием проекций на ось аппликат.
d=Pz-F(x,y)
В альтернативном варианте может применяться более точный расчет расстояния, учитывающий кривизну разлома. В дополнение к типу плоскости оптимального приближения пространства модели считается, что должны существовать другие пространства модели разлома, которые служат подобной цели балансировки производительности и точности в технологическом процессе интеллектуального восприятия ради интерактивных времен реакции.
2. Действительная и мнимая составляющая модели - модель разлома является конечноэлементным отображением разлома в расположенных с равными интервалами дискретных расположениях. Каждое расположение имеет дополнительную классификацию в качестве действительного или мнимого, двоичное состояние, вычисляемое, когда вычисляется модель разлома, и сохраняется в качестве компонента модели. При оценке произвольной 3-х мерной точки, то есть точки P (x, y, z) интерпретации, напротив разлома, F (x, y), в направлении, перпендикулярном разлому (в качестве расчета расстояния, приведенного выше), одинаковое двоичное состояние (действительное против мнимого) применяется к точке. Это происходит так, что технологический процесс интеллектуального восприятия разломов является чувствительным к окончанию разлома на границе непрерывного профиля гребня и не воспринимает и не обнаруживает разлом в качестве ближайшего, если за пределами его границы. Точки интерпретации, P (x, y, z), проецирующиеся вне границ разлома, то есть на мнимые части, обрабатываются иначе, чем точки, проецирующиеся на действительные части разлома.
Со ссылкой на фиг.15 проиллюстрирован способ Обнаружения близости. Каждая точка интерпретации проверяется в отношении того, находится ли она поблизости от (или является ли она близкой к или ближайшей к) других разломов. Термины поблизости от или ближайший к либо близкий к, по определению, указывают на приблизительное нормальное расстояние от каждой точки интерпретации до всех других разломов. В связи с термином близкий к, при котором один разлом признается близким к другому разлому, на фиг.15 описан способ обнаружения близости. На фиг.15 способ обнаружения близости (в котором один разлом признается близким к или ближайшим к, либо находящимся поблизости от другого разлома) включает в себя следующие этапы: (1) в связи с каждым разломом в инфраструктуре, за исключением интерпретируемого разлома, этап 33 по фиг.15, (2) следует ли игнорировать любые взаимосвязи с этим разломом, этап 35 на фиг.15, (3) если да, возвратиться на этап 33, а если нет, осуществить доступ к модели разлома плоскости оптимального приближения и ее преобразованию, этап 37 по фиг.15, (4) получить расстояние соединения разлом-разлом, этап 39 по фиг.15, (5) для каждой новой точки 'P' интерпретации, этап 41 по фиг.15, (6) преобразовать P в координатное пространство плоскости оптимального приближения, этап 43 по фиг.15, (7) проецировать 'P' на разлом в качестве точки P (то есть точки P штрих), этап 45 по фиг.15, (8) точка P (то есть точка P штрих) находится в действительной части разлома?, этап 47 по фиг.15, (9) расстояние от P до P'<D? (то есть является ли расстояние от P до P штрих меньшим, чем D?), этап 49 по фиг.15, (10) если нет, вернуться на этап 41, а если да, пометить разлом как ближайший к или находящийся в непосредственной близости от разлома интерпретации, этап 51 по фиг.15. В действии, со ссылкой на фиг.15, в связи со способом обнаружения близости каждая новая точка интерпретации проверяется на близость ко всем другим разломам. Для данного разлома каждая точка P проецируется в расположение P' на разломе в направлении, приблизительно перпендикулярном разлому. P должна попадать в пределы действительной части разлома (смотрите фиг.13 для иллюстрации действительных в сравнении с мнимыми частями разлома). Чтобы добиться интерактивной производительности, для вычисления близости используется оптимальная модель разлома. Каждая точка P преобразуется в пространство модели разлома (каковое может быть простым преобразованием из одной 3-х мерной системы декартовых координат в другую 3-х мерную систему декартовых координат). Расстояние от P до P' в таком случае может быть простой разностью между проекциями P и P' на ось аппликат, и эта разность сравнивается с расстоянием соединения разлом-разлом D, чтобы оценить, является ли разлом достаточно близким к интерпретации. Либо более точная P' и соответствующее расстояние могут оцениваться с учетом кривизны разлома. P' затем оценивается на свое действительное или мнимое расположение в пределах модели разлома.
Специальные преобразования используются для достижения интерактивной производительности и для учета границ разлома - замкнутого профиля гребня. Точка, проецирующаяся за пределами границы разлома, не будет инициировать потенциальную взаимосвязь.
Одна или более точек первого разлома, которые лежат в пределах расстояния соединения разлом-разлом до другого, второго, разлома, являются причиной, чтобы первый разлом представлялся интерпретатору во всплывающем списке или представлялся мерцанием кривой пересечения разлом-разлом на устройстве отображения, если такой первый разлом уже не был отклонен в качестве несвязанного.
Со ссылкой на фиг.16 эта фиг.16 иллюстрирует набор точек 42 на самом левом разломе 44, которые расположены ближайшими к самому правому (усекающему) разлому 46 на фиг.16, тем самым формируя взаимосвязь разлом-разлом между самым левым разломом 44 и самым правым разломом 46. Поэтому самый правый (усекающий) разлом 46 появился бы во всплывающем списке или показывался бы мерцающей подсветкой кривой пересечения разлом-разлом на устройстве отображения, которые представляются интерпретатору в устройстве 10d регистратора или отображения по фиг.1. Интерпретатор после просмотра всплывающего списка или наблюдения мерцания кривой пересечения разлом-разлом на устройстве 10d регистратора или отображения, должен подтверждать, что вышеупомянутая взаимосвязь разлом-разлом действительна.
Со ссылкой на фиг.17, после того как интерпретатор подтверждает, что вышеупомянутая взаимосвязь разлом-разлом действительна, пересечение двух разломов 44 и 46 по фиг.16 моделируется, если уже не смоделировано, как указано самой длинной линией 48, фигурирующей на фиг.17. Эта кривая самой длинной линии 48, вероятно, длиннее, чем необходимо быть, и специально моделируется за пределами, где она должна структурно завершаться. Эта интерпретация пересечения (изображенная самой длинной линией 48 на фиг.17) затем добавляется в набор интерпретаций разлома (то есть отбираемых вручную) и обрабатывается подобно любой другой интерпретации. Несмотря на точное пересечение на этой стадии, его основное назначение состоит в том, чтобы интерпретировать разлом возле связанного усекающего разлома. Финальная кривая пересечения моделируется позже отдельно от этого этапа и отдельно сохраняется в качестве модельной сущности, кроме сущности ее комплементарной интерпретации. Моделирование инфраструктуры разломов, где применяется усечение разлома, вычисляет это смоделированное пересечение.
Со ссылкой на фиг.3, 5 и 19 сначала, со ссылкой на фиг.19, модель, показанная на фиг.19, изображает финальную модель двух связанных разломов, где один разлом смоделирован вплоть до и завершается на общем пересечении с другим разломом; смотрите «… отобразить связанную модель, чтобы проиллюстрировать разломы в качестве соединенных (то есть пересекающихся)», на этапе 28 по фиг.3, и смотрите «...отобразить финальную модель, чтобы проиллюстрировать разломы в качестве соединенных (то есть пересекающихся)» на этапе 31 по фиг.5.
Как часть фиг.17, вычисленная кривая пересечения изображена самой длинной линией 48, показанной на фиг.17. Сохранение вычисленной кривой пересечения (изображенной самой длинной линией 48 на фиг.17) наряду с другими интерпретациями предоставляют возможность производиться редакционным изменениям и корректировкам, как кто-то делал бы в отношении любой интерпретации. Оцененное пересечение может переделываться, если необходимо. Посредством соединения смоделированной кривой заодно с данными обычной интерпретации этот этап дополнительно увязывает и объединяет технологический процесс моделирования заодно с технологическим процессом интерпретации.
Со ссылкой на фиг.18 проиллюстрировано более подробное объяснение этапа 28 по фиг.3 и этапа 31 по фиг.5. На фиг.18 проиллюстрирован способ для вычисления кривой пересечения разлом-разлом, способ является приспособленным для вычисления вычисленной кривой пересечения, также известной как кривая пересечения разлом-разлом, изображенной самой длинной линией 48, показанной на фиг.17. На фиг.18 проиллюстрировано некоторое количество этапов с 53 по 63, которые выполняются процессором 10a компьютерной системы по фиг.1, для того чтобы вычислять вышеупомянутую вычисленную кривую пересечения, которая также известна как кривая пересечения разлом-разлом. Когда процессор 10a компьютерной системы 10 по фиг.1 выполняет этапы 53-63 по фиг.18, следующие этапы выполняются один за другим с целью вычисления кривой пересечения разлом-разлом (1). Осуществить доступ к модели интерпретированного разлома Fa и ее преобразованию, этап 53 на фиг.18 (2). Осуществить доступ к модели интеллектуально воспринятого разлома Fb и ее преобразованию, этап 55 на фиг.18 (3). Вычислить кривую пересечения (Fa-Fb) на протяжении интересующего объема (VOI) общей модели, обычно содержащего кривую как действительной, так и мнимой частей, этап 57 по фиг.18 (4). Получить расстояние соединения разлом-разлом D, этап 59 по фиг.18 (5). Вычислить экстраполированное замкнутым профилем гребня D за пределами данных Fa с использованием выбранного стиля замкнутого профиля гребня (изотропного или анизотропного), этап 61 по фиг.18 (6). Переставить кривую пересечения в действительно оцененную внутри замкнутого профиля гребня, этап 63 на фиг.18. Со ссылкой на этап 57 по фиг.18 вычисляется неурезанное пересечение и используются другие этапы для его урезания действительной частью. Поскольку все модели разломов полностью экстраполированы на всем протяжении VOI (интересующего объема) модели - составляющие части, помеченные как действительные или мнимые, кривая пересечения будет тянуться через VOI модели подобным образом в качестве расширенного или неурезанного пересечения. На этапе 61 по фиг.18, который вычисляет экстраполированный замкнутый профиль гребня, этот этап 61 используется для урезания пересечения до значимой, например действительной, части.
На фиг.17 вычислена вторая кривая, параллельная кривой 48 пересечения, смещенная на противоположную сторону усекающего разлома 50 на фиг.13. Эта вторая кривая является усеченной интерпретацией, как указывается более короткой линией 65, показанной на фиг.17. Ее замысел предназначен для моделирования; то есть для начального моделирования усеченного разлома за усекающим разломом в течение этапа 16 по фиг.2, то есть, когда разлом моделируется не связанным с любым другим разломом. Это предоставляет чистому пересечению возможность формироваться, когда разломы моделируются как связанные и пересекающиеся и вычисляется финальная модель. После пересечения выступающее расширение удаляется с использованием уже установленного правила взаимосвязи. Эта вторая кривая 65 из точек также добавляется в качестве дополнительных интерпретаций разлома. Она предоставляет возможность производиться редакционным изменениям и корректировкам, как кто-то делал бы в отношении любой интерпретации. Эта вторая кривая 65 может переделываться, если необходимо. Она также обладает эффектом дополнительного увязывания и объединения технологического процесса моделирования с технологическим процессом интерпретации.
На фиг.17 хранение вышеупомянутой второй кривой 65 (которая смещена на противоположную сторону усекающего разлома 50 на фиг.17) в качестве интерпретации предоставляет усекающему разлому 50 возможность впоследствии интерпретироваться повторно и выхватываться из усеченного разлома 67 на фиг.17 без оказания влияния на действительность взаимосвязи разлом-разлом или ее правило усечения. При повторном построении инфраструктуры разлома, то есть пары разломов на фиг.17, по-прежнему существовало бы действительное пересечение и по-прежнему могла бы строиться финальная усеченная модель. В этом сценарии смоделированное пересечение перемещается в положение, отличное от пересечения интерпретации, вычисленного ранее - самой длинной линии 48 на фиг.17. Поскольку одна кривая пересечения хранится с интерпретацией, а другая хранится в качестве части финальной модели (и повторно вычисляется по мере необходимости, чтобы гарантировать, что оба разлома соединяются в общем расположении), поддерживаются сценарии повторной интерпретации разлома. Если один или более соединенных разломов редактируются так, что линия пересечения больше не действительна, разломы вновь становятся активными или могущими быть выбранными в пределах последовательности операций интеллектуального восприятия. Линия пересечения между разломами также может редактироваться по-прежнему наряду с сохранением соединения разлом-разлом.
Вторая кривая 65 по фиг.17 является одним из способов, используемых для подрезки одной модели разлома по другому разлому для выполнения пересечения и усечения, но есть и другие. При условии, что вторая кривая 65 алгоритмически адаптируется к геометрии модели разлома и расположению первой кривой (пересечения), явное отображение может заменяться неявным расчетом или отображением и по-прежнему добиваться прежнего назначения подрезания модели одного разлома другим разломом для выполнения пересечения и усечения.
Как часть фиг.17 отметим пунктирную линию 48 на фигуре. Это замкнутый профиль гребня, вычисленный, как описано на фиг.18, этап 61. Расстояние соединения разлом-разлом D является расстоянием, на которое замкнутый профиль гребня простирается за данные интерпретируемого разлома. Отметим, что это же самое расстояние используется для начального обнаружения близости близлежащего разлома, затем вновь используется для проецирования интерпретированного разлома и фиксации его пересечения с близлежащим разломом. При вычислении этого замкнутого профиля гребня необязательный стиль (изотропная экстраполяция или анизотропная экстраполяция) оказывает воздействие только на длину кривой пересечения. На фиг.17 изотропная экстраполяция выбиралась в качестве стиля замкнутого профиля гребня разлома. Выбор анизотропной экстраполяции вызвал бы экстраполяцию в горизонтальном направлении без вертикальной экстраполяции и обладает возможным эффектом укорачивания кривой пересечения.
Поэтому как часть последовательности операций интерпретации разлома последовательность операций интерактивной автоматической обработки моделирования разломов, включающая в себя способ для интеллектуального распознавания взаимосвязей разлом-разлом, как показано в первом варианте осуществления по фиг.2 и 3 и втором варианте осуществления по фиг.4 и 5, будет предоставлять не меняющую основной режим работы интеллектуальную систему для помощи или тренировки либо содействия интерпретатору в установлении взаимосвязей разлом-разлом на ранней стадии и в качестве готовых решений интерпретации разлома. Последовательность операций называется интеллектуальное восприятие разломов, поскольку интерпретатор интерактивно отвечает на всплывающий список или отвечает на подсветку мерцанием кривой пересечения разлом-разлом на устройстве отображения, отображаемые на устройстве 10d регистратора или отображения, наряду с выполнением функции интерпретации. Функция Интеллектуального восприятия будет предлагать разломы-кандидаты, которые, возможно, должны присоединяться ко второму разлому, являющемуся интерпретируемым, когда интерпретатор занимается интерпретацией второго разлома. Интерпретатор принимает или отклоняет эти предложения в ответ на функцию Интеллектуального восприятия, а система моделирования создает или уничтожает соединение.
Поставляемая в комплекте в качестве процесса интерпретации разлома последовательность операций интерактивной автоматической обработки моделирования разломов, включающая в себя способ для интеллектуального распознавания взаимосвязей разлом-разлом, как показано в первом варианте осуществления по фиг.2 и 3 и втором варианте осуществления по фиг.4 и 5, совместно реализует последовательность операций задаваемого событиями моделирования принятия решения для определения взаимосвязей разлом-разлом во время интерпретации разлома.
В дополнение, в качестве части процесса интерпретации разлома последовательность операций интерактивной автоматической обработки моделирования разломов, включающая в себя способ для интеллектуального распознавания взаимосвязей разлом-разлом, как показано в первом варианте осуществления по фиг.2 и 3 и втором варианте осуществления по фиг.4 и 5, будет добавлять дополнительные данные в пул данных интерпретации, где дополнительные данные отображают линию пересечения между парой разломов. Эти дополнительные данные сродни автоматическим интерпретациям, освобождающим интерпретатора от необходимости интерпретировать пересечение разломов, и эти дополнительные данные устанавливают приблизительное расположение пересечения между парой разломов, означая, что точное пересечение выясняется и сохраняется где-то в другом месте, когда смоделирована и сохранена полная инфраструктура разломов, то есть создана финальная модель.
В дополнение, в качестве части процесса интерпретации разлома, последовательность операций интерактивной автоматической обработки моделирования разломов, включающая в себя способ для интеллектуального распознавания взаимосвязей разлом-разлом, как показано в первом варианте осуществления по фиг.2 и 3 и втором варианте осуществления по фиг.4 и 5, будет добавлять дополнительные данные в пул данных интерпретации, давая интерпретатору некоторую степень свободы для последующего перемещения или редактирования одного из разломов в более позднее время, вдобавок по-прежнему сохраняя возможность интерпретатора находить смоделированное соединение между разломами.
Далее обратимся к фиг.20 и 21. Эти фиг.20 и 21 иллюстрируют основное назначение упомянутой выше последовательности операций для интерактивной автоматической обработки моделирования разломов, включающей в себя способ для интеллектуального распознавания взаимосвязей разлом-разлом, как проиллюстрировано на фиг.1 и 19, то есть для извлечения подземных залежей углеводородов, в том числе нефти и/или газа, из земного пласта. Фиг.20 иллюстрирует характеристики земного пласта, в том числе место в пласте, где распложены нефть и/или газ, а фиг.21 иллюстрирует буровую установку, которая может использоваться для извлечения подземных залежей углеводородов, в том числе нефти и/или газа, из такого места в земном пласте по фиг.20.
На фиг.20 первый горизонт (H1) 140 и второй горизонт (H2) 142 пересечены поверхностью разлома 58. Теперь, когда поверхность разлома 58 была определена, необходимо интерпретировать выходную запись каротажной диаграммы и входную запись приведенных сейсмических данных (показанных на фиг.23 и 26) для определения точного расположения подземных залежей углеводородов в земном пласте. Например, на фиг.20 поверхность разлома 58 прорезается через первый горизонт 140 и второй горизонт 142 в земном пласте. Линия 144 изображает разделение между нефтью 146 и водой 148, нефть 146 и вода 148 имеют место по одну сторону поверхности разлома 58. Скалистый и пористый материал имеет место по другую сторону поверхности разлома 58. Поверхность разлома 58 пересекает горизонты (H1) 140 и (H2) 142 в двух местах, первом пересечении 150 и втором пересечении 152. Из фиг.20 очевидно, что нефть (и/или газ) 146 обычно существуют возле пересечений 150 и 152 между поверхностью разлома 58 и горизонтами (H1) 140 и (H2) 142. Для того чтобы извлечь нефть 146 из земного пласта, необходимо осуществить бурение возле первого пересечения 150 в точке 154. На фиг.21, вспоминая по фиг.20, что было бы необходимо осуществлять бурение возле первого пересечения 150 в точке 154, для того чтобы извлечь нефть 146 из земного пласта, буровая установка может быть размещена на земной поверхности непосредственно над точкой 154 по фиг.20 с целью извлечения нефти 146 из земного пласта.
На фиг.21 проиллюстрирован пример такой буровой установки 101. Буровая установка 101 расположена над конкретным расположением в земном пласте (то есть над точкой 154 в земном пласте по фиг.20), где потенциально расположены нефть и/или газ. На фиг.21 один из вариантов осуществления буровой установки 101 включает в себя размещаемую на поверхности систему 103, размещаемую в скважине систему 105 и поверхностный блок 107 управления. В проиллюстрированном варианте осуществления буровая скважина 109 формируется роторным бурением некоторым образом, который хорошо известен. Специалисты в данной области техники, одаренные преимуществом этого раскрытия, однако, будут принимать во внимание, что настоящее изобретение также находит применение в буровых применениях, иных чем традиционное роторное бурение (например, основанное на забойном турбинном двигателе направленное бурение), и не ограничено наземными установками. Размещаемая в скважине система 105 включает в себя бурильную колонну 111, подвешенную в буровой скважине 109, с буровым долотом на своем нижнем конце. Размещаемая на поверхности система 103 включает в себя наземную платформу и агрегат 115 буровой вышки, расположенный над буровой скважиной 109, пронизывающей подземный пласт 17. Агрегат 115 включает в себя буровой ротор 117, ведущую бурильную трубу 119, захват 121 и вертлюг 123. Бурильная колонна 111 вращается буровым ротором 117, побуждаемым к движению не показанным средством, которое входит в зацепление с ведущей бурильной трубой 119 на верхнем конце буровой колонны. Буровая колонна 111 свешивается с захвата 121, прикрепленного к талевому блоку (также непоказанному), через ведущую бурильную трубу 119 и вертлюг, который дает возможность вращения буровой колонны относительно захвата. Размещаемая на поверхности система дополнительно включает в себя буровой раствор или грязь 125, хранимые в котловане, образованном на буровой площадке. Насос 129 доставляет буровой раствор 125 вовнутрь буровой колонны 111 через промывной канал в вертлюге 123, заставляя буровой раствор течь вниз через буровую колонну 111, как указано направленной стрелкой 131. Буровой раствор выходит из буровой колонны 111 через промывные каналы в буровом долоте 113, а затем совершает циркуляционное движение вверх через область между наружной поверхностью буровой колонны и стенкой буровой скважины, называемую кольцевым каналом, как указано направленными стрелками 133. Таким образом, буровой раствор смазывает буровое долото 113 и выносит буровые шламы на поверхность по мере того, как он возвращается в котлован 127 для рециркуляции. Буровая колонна 111 дополнительно включает в себя оборудование низа буровой колонны (BHA), в целом указываемое ссылкой как 135 возле бурового долота 113 (другими словами, в пределах нескольких длин воротника бура от бурового долота). Оборудование низа буровой колонны включает в себя возможности для измерения, обработки и сохранения информации, а также поддержания связи с поверхностью. BHA 135 дополнительно включает в себя воротники 137, 139 и 141 бура для выполнения различных других измерительных функций. Воротник 137 бура у BHA 135 включает в себя устройство 143 для определения и сообщения одного или более свойств пласта 17, окружающего буровую скважину 109, таких как удельное сопротивление (или проводимость) пласта, фоновое излучение, плотность (по гамма-излучению или нейтронная) и поровое давление. Воротник 139 бура содержит инструмент для скважинных исследований во время бурения (MWD). Инструмент для MWD дополнительно включает в себя устройство для выработки электроэнергии для размещаемой в скважине системы. Несмотря на то, что система формирования импульсов давления в столбе буровой грязи изображена с генератором с механическим приводом от потока бурового раствора 125, который протекает через буровую колонну 111 и воротник 141 бура MWD, могут применяться другое питание и/или аккумуляторные системы. Датчики расположены вокруг скважины для сбора данных, предпочтительно в реальном времени, касательно работы скважины, а также условий в скважине. Например, мониторы, такие как камеры 147, могут быть предусмотрены для выдачи изображений работы. Поверхностные датчики или контрольно-измерительные приборы 149 расположены вокруг размещаемой на поверхности системы для предоставления информации о поверхностных блоках, такой как, среди прочего, давление на стояке, нагрузка на захват, глубина, крутящий момент на поверхности, частота вращения ротора. Скважинные датчики или контрольно-измерительные приборы 151 расположены вокруг бурового инструмента и/или ствола скважины для предоставления информации об условиях на забое скважины, таких как, среди прочего, давление в скважине, вес на головке бура, крутящий момент на головке бура, направление, угол наклона, скорость вращения воротника, температура инструмента, температура в кольцевом канале и состояние передней поверхности бурового инструмента. Информация, собранная датчиками и камерами, передается в размещаемую на поверхности систему, размещаемую в скважине систему и/или поверхностный блок управления. Инструмент 141 для MWD включает в себя узел 145 связи, который поддерживает связь с размещаемой на поверхности системой. Узел 145 связи приспособлен для отправки сигналов на и приема сигналов с поверхности с использованием телеметрии с формированием импульсов давления в столбе буровой грязи. Узел связи, например, может включать в себя передатчик, который формирует сигнал, такой как акустический или электромагнитный сигнал, который является представляющим измеренные буровые параметры. Сформированный сигнал принимается на поверхности преобразователями, изображенными номером 151 ссылки, которые преобразуют принятые акустические сигналы в электронные сигналы для дополнительной обработки, хранения, шифрования и использования согласно традиционным способам и системам. Связь между размещаемой в скважине и размещаемой на поверхности системами изображена в качестве являющейся телеметрией с формированием импульсов давления в столбе буровой грязи, такой как описанная в патенте №5517464 США, переуступленной правопреемнику настоящего изобретения. Специалистом в данной области техники будет приниматься во внимание, что может применяться многообразие телеметрических систем, таких как проводная буровая труба, электромагнитная или другие известные телеметрические системы.
Далее, обратимся к фиг. с 22 по 27. Вспомним из фиг.1, что входные данные 13 поставляются в компьютерную систему 10 и что процессор 10a выполняет программное обеспечение, хранимое в памяти 10с, в ответ на такие входные данные 13. Детализация входных данных 13 по фиг.1, которые поставляются в компьютерную систему 10, будет обсуждена ниже со ссылкой на фиг. с 22 по 27 чертежей. Фиг.22 и 23 иллюстрируют способ для формирования выходной записи каротажной диаграммы. Фиг.24, 25 и 26 иллюстрируют способ для формирования выходной записи приведенных сейсмических данных. Фиг.27 иллюстрирует, каким образом выходная запись каротажной диаграммы и выходная запись приведенных сейсмических данных вместе и в комбинации изображают входные данные 13, которые вводятся в компьютерную систему 10 по фиг.1.
На фиг.22 передвижная каротажная станция 200 опускает каротажный прибор 202 в ствол 204 скважины, и каротажный прибор 202 стимулирует и возбуждает земной пласт 206. В ответ датчики в каротажном приборе 202 принимают сигналы из пласта 206 и в ответ на них другие сигналы, представляющие данные 208 каротажной диаграммы, распространяются вверх по стволу скважины из каротажного прибора 202 в компьютер 210 передвижной каротажной станции. Выходная запись 212 каротажной диаграммы формируется компьютером 210 передвижной каротажной станции, который отображает данные 208 каротажной диаграммы.
На фиг.23 проиллюстрировано более подробное строение компьютера 210 передвижной каротажной станции. Шина 210a принимает данные 208 каротажной диаграммы и в ответ на них процессором 210b формируется выходная запись 212 каротажной диаграммы, выходная запись 212 каротажной диаграммы отображает и/или регистрирует данные 208 каротажной диаграммы. Выходная запись 212 каротажной диаграммы вводится в рабочую станцию или компьютерную систему интерпретации по фиг.27.
На фиг.24 проиллюстрированы устройство и ассоциативно связанный способ для выполнения работ по трехмерной (3D) сейсмической разведке в местоположении на земной поверхности возле ствола скважины по фиг.22.
На фиг.24 источник 214 взрывной или акустической энергии, расположенный под поверхностью земли 216, детонирует и формирует множество звуковых или акустических колебаний 218, которые распространяются вниз и отражаются от слоя 220 горизонта в пределах земного пласта 206. Слой 220 горизонта мог бы быть верхним слоем из скалистой породы или песка либо сланца. Когда звуковые колебания отражаются от слоя 220 горизонта, звуковые колебания 218 будут распространяться вверх и будут приниматься на множестве приемников 222, называемых сейсмоприемниками 222, расположенными на поверхности земли. Множество сейсмоприемников 222, каждый из которых будет формировать электрический сигнал в ответ на прием звукового колебания в нем, и множество электрических сигналов будут формироваться из сейсмоприемников 222, множество сигналов (указываемое ссылкой как принимаемые сейсмические данные 226) принимаются в передвижной регистрирующей станции 224. Множество электрических сигналов из сейсмоприемников 222 (то есть принимаемые сейсмические данные 226) отображают набор характеристик земного пласта, включающего в себя горизонты 220, расположенных в земле под сейсмоприемниками 222. Передвижная регистрирующая станция 224 содержит в себе компьютер 225, который будет принимать и сохранять множество сигналов, принятых из сейсмоприемников 222. Выходная запись 232 сейсмограммы будет формироваться из компьютера 225 на передвижной регистрирующей станции 224, которая будет включать в себя и/или отображать, и/или сохранять множество электрических сигналов, которые являются отображающими характеристики земного пласта, включающего в себя горизонты 220, расположенные в земле под сейсмоприемниками 222.
На фиг.25 проиллюстрировано более подробное строение компьютера 225 передвижной каротажной станции. Компьютер 225 передвижной каротажной станции по фиг.24 включает в себя процессор 228 и память 230, присоединенные к системной шине. Электрические сигналы, принятые из сейсмоприемников 222 во время работ трехмерной сейсмической разведки и указываемые ссылкой как принимаемые сейсмические данные 226, принимались бы в компьютер передвижной регистрирующей станции через блок 226 «Принимаемых сейсмических данных» на фиг.25 и сохранялись бы в памяти 230 компьютера 225 передвижной регистрирующей станции. Когда требуется, выходная запись 232 сейсмограммы формируется компьютером передвижной регистрирующей станции 225, выходная запись 232 сейсмограммы является приспособленной для регистрации и отображения «множества сейсмических данных», отображающих трассы или наборы принимаемых сейсмических данных по электрическим сигналам, принятым компьютером 225 передвижной регистрирующей станции из сейсмоприемников 222.
На фиг.26 проиллюстрирована упрощенная схема универсальной вычислительной машины 234, которая использует хранимое «программное обеспечение приведения данных» для выполнения операции «приведения данных» над «множеством сейсмических данных», включенных в выходную запись 232 сейсмограммы по фиг.25. Универсальная вычислительная машина 234 создает «выходную запись приведенных сейсмических данных» 240 по фиг.26, которая приспособлена для регистрации и отображения информации, которая отображает «приведенные» варианты «множества сейсмических данных», включенных в выходную запись 232 сейсмограммы по фиг.26. Универсальная вычислительная машина 234 по фиг.26 включает в себя процессор 236 универсальной вычислительной машины, присоединенный к системной шине, и память 238, также присоединенную к системной шине, которая хранит в ней «программное обеспечение приведения данных». Выходная запись 232 сейсмограммы по фиг.25, которая включает в себя «множество сейсмических данных», передается на системную шину универсальной вычислительной машины 234 по фиг.26. Как результат «множество сейсмических данных», включенных в выходную запись 232 сейсмограммы по фиг.26, далее вводятся в процессор 236 универсальной вычислительной машины по фиг.26. Процессор 236 универсальной вычислительной машины 234 на фиг.26 приводит в исполнение «программное обеспечение приведения данных», хранимое в памяти 238 универсальной вычислительной машины. «Программное обеспечение приведения данных», которое хранится в памяти 238 универсальной вычислительной машины 234 по фиг.26, может быть найдено в печатном издании, озаглавленном «Seismic Velocity Analysis and the Convolutional Model» («Анализ скорости сейсмической волны и сверточная модель»), от Эндерса А. Робинсона, раскрытие которой включено в это описание изобретения посредством ссылки. Когда выполняется «программное обеспечение» в памяти 238, процессор 236 универсальной вычислительной машины будет выполнять операцию «приведения данных» над «множеством сейсмических данных», которые включены в выходную запись 232 сейсмограммы по фиг.26. Когда «операция приведения данных» завершается, процессор 236 универсальной вычислительной машины будет формировать «выходную запись приведенных сейсмических данных» 240, которая будет регистрироваться, и приспособлен для отображения информации, представляющей «приведенный вариант» «множества сейсмических данных», включенных в выходную запись 232 сейсмограммы по фиг.26, и учета набора характеристик относительно земного пласта, расположенного около ствола скважины по фиг.22, характеристики включают в себя расположение и структуру горизонтов 220 по фиг.24.
На фиг.27 выходная запись 212 каротажной диаграммы по фиг.23 и выходная запись 240 приведенных сейсмических данных по фиг.26 вместе и в комбинации изображают входные данные 13 по фиг.1, которые вводятся в компьютерную систему 10 по фиг.1.
Функциональное описание работы программного обеспечения 12 моделирования разломов по фиг.1, когда выполняется процессором 10a по фиг.1, которое приспособлено для осуществления на практике последовательности операций интерактивной автоматической обработки моделирования разломов, включающей в себя способ для интеллектуального распознавания взаимосвязей разлом-разлом, как показано в первом варианте осуществления по фиг.2 и 3 и втором варианте осуществления по фиг.4 и 5, будет изложено в последующих параграфах со ссылкой на фиг. с 1 по 27 чертежей.
На фиг.1 компьютерная система 10 принимает входные данные 13. На фиг.27 входные данные 13 включают в себя выходную запись 212 каротажной диаграммы и входную запись 240 приведенных сейсмических данных. Фиг.22 и 23 описывают, каким образом формируется выходная запись 212 каротажной диаграммы, а фиг.24-26 описывают, каким образом формируется выходная запись 240 приведенных сейсмических данных. На фиг.1 процессор 10a выполняет программное обеспечение 12 моделирования разломов, хранимое в памяти 10c, наряду с использованием входных данных 13 и формирует выходные данные, которые регистрируются или отображаются в устройстве 10d регистратора или отображения. Один из примеров выходных данных, которые регистрируются или отображаются в устройстве 10d регистратора или отображения, проиллюстрирован на фиг.19. На фиг.19 выходные данные, например, могут содержать финальную модель двух связанных разломов, где один разлом смоделирован вплоть до и завершается на общем пересечении с другим разломом (см. этап 28 по фиг.3 и этап 31 по фиг.5). На фиг.1, программное обеспечение 12 моделирования разломов, которое хранится в памяти 10c, когда выполняется процессором 10a, будет осуществлять на практике последовательность операций, включающую в себя интерактивную автоматическую обработку моделирования разломов, которая включает в себя способ для интеллектуального распознавания взаимосвязей разлом-разлом. Первый вариант осуществления способа интеллектуального распознавания взаимосвязей разлом-разлом проиллюстрирован на фиг.2 и 3, а второй вариант осуществления способа интеллектуального распознавания взаимосвязей разлом-разлом проиллюстрирован на фиг.4 и 5. Способ для интеллектуального распознавания взаимосвязей разлом-разлом будет предоставлять не меняющую основной режим работы интеллектуальную систему для помощи или тренировки либо содействия интерпретатору в установлении взаимосвязей разлом-разлом на ранней стадии во время процесса интерпретации разлома. Способ для интеллектуального распознавания взаимосвязей разлом-разлом, который фактически представляет последовательность операций автоматически распознаваемой взаимосвязи среди разломов, полезен, когда компьютеры представляют собой предпочтительное средство для получения характеристик залежей нефти и газа с целью бурения стволов скважин и для других решений, которым необходимо приниматься в связи с разработкой залежи во время разведки месторождений и добычи нефти и/или газа. Поэтому способ для интеллектуального распознавания взаимосвязей разлом-разлом представляет собой улучшение в отношении способа, посредством которого структуры разломов моделируются в качестве встроенной части процесса интерпретации разлома. Поэтому способ для интеллектуального распознавания взаимосвязей разлом-разлом (который осуществляется на практике процессором 10a по фиг.1, когда процессор 10a выполняет программное обеспечение 12 моделирования разломов, хранимое в памяти 10c) включает в себя следующие этапы:
(этап 1) автоматического распознавания взаимосвязей между разломами (например, одной из взаимосвязей между разломами была бы: каким образом один разлом должен усекать другой разлом), и
(этап 2) представления пользователю/оператору взаимосвязей между разломами в качестве неотъемлемой части последовательности операций интерпретации.
Когда процессор 10a завершает свое выполнение по (этапу 1) и (этапу 2) программного обеспечения 12 моделирования разломов, последовательность операций интерактивной автоматической обработки моделирования разломов, включающая в себя способ интеллектуального распознавания взаимосвязей разлом-разлом, завершается. Как результат, формируется финальная модель, и один из примеров финальной модели проиллюстрирован на фиг.19. Финальная модель показывает дополнительную ценность в отношении последовательности операций интерпретации разлома.
Первый вариант осуществления программного обеспечения 12 моделирования разломов проиллюстрирован на фиг.2 и 3. Когда процессор 10a по фиг.1 выполняет первый вариант осуществления программного обеспечения 12 моделирования разломов, процессор 10a занимается осуществлением на практике способа для интерактивной автоматической обработки моделирования разломов, включающего в себя способ для интеллектуального распознавания взаимосвязей разлом-разлом, способ для интеллектуального распознавания взаимосвязей разлом-разлом включает в себя (этап 1) и (этап 2). Однако (этап 1) включает в себя следующие дополнительные этапы с (1) по (6), как изложено ниже: (1). Вычисление моделей каждого разлома, как будто бы каждый разлом был не связанным с любым другим разломом, этап 16 по фиг.2 (2). Сохранение несвязанных моделей каждого разлома современными по мере того, как создаются новые данные интерпретации, этап 18 по фиг.2 (3). Обнаружение условия, в соответствии с которым данные, ассоциативно связанные с одним разломом (то есть разломом, являющимся интерпретируемым), указывают, что разлом, являющийся интерпретируемым, близок к одному или более других разломов, этап 20 по фиг.2 (см. фиг.35 касательно обнаружения близости разлома) (4). Представление во временном рабочем окне одного или более потенциально связанных разломов интерпретатору интерпретатор подтверждает или опровергает в ответе, что взаимосвязь соединения между потенциально связанными разломами действительна, этап 22 по фиг.2 (5). Регистрация ответа от интерпретатора и, если взаимосвязь соединения подтверждена интерпретатором, вычисление всех свойств взаимосвязи соединения, этап 24 по фиг.3 и (6). Добавление кривой пересечения и других свойств соединения, отображающих новые интерпретации, к разлому, которые вводят взаимосвязь соединения с данными интерпретации, этап 26 по фиг.3 и В дополнение, (этап 2) включает в себя следующий дополнительный этап (7), как изложено ниже (7). Необязательное вычисление и отображение финальной модели для иллюстрации разломов в качестве являющихся соединенными, то есть в качестве являющихся пересекающимися, этап 28 по фиг.3. Вышеупомянутый дополнительный этап (3), который приспособлен для обнаружения условия, в соответствии с которым данные, ассоциативно связанные с одним разломом (то есть разломом, являющимся интерпретируемым), указывают, что разлом, являющийся интерпретируемым, близок к одному или более других разломов (этап 20 по фиг.2), фактически включает в себя другой способ, известный как Обнаружение близости разломов, который проиллюстрирован на фиг.15. На фиг.15, для того чтобы осуществлять на практике дополнительный этап (3) и обнаруживать условие, в соответствии с которым данные, ассоциативно связанные с одним разломом (то есть разломом, являющимся интерпретируемым), указывают, что разлом, являющийся интерпретируемым, близок к (либо является ближайшим к или находится поблизости от) одному или более других разломов, процессор 10a по фиг.1 теперь должен выполнять этапы по фиг.15, как изложено ниже (1). В связи с каждым разломом в инфраструктуре за исключением интерпретируемого разлома, этап 33 по фиг.15 (2). Следует ли игнорировать любые взаимосвязи с этим разломом, этап 35 на фиг.15 (3). Если да, возвратиться на этап 33, а если нет, осуществить доступ к модели разлома плоскости оптимального приближения и ее преобразованию, этап 37 по фиг.15 (4). Получить расстояние соединения разлом-разлом, этап 39 по фиг.15 (5). Для каждой новой точки P интерпретации, этап 41 по фиг.15 (6). Преобразовать P в координатное пространство плоскости оптимального приближения, этап 43 по фиг.15 (7). Проецировать P на разлом в качестве точки P' (то есть точки P штрих), этап 45 по фиг.15 (8). Точка P' (то есть точка P штрих) находится в действительной части разлома?, этап 47 по фиг.15 (9). Расстояние от P до P'<D? (то есть является ли расстояние от P до P штрих меньшим, чем D?), этап 49 по фиг.15 (10). Если нет, вернуться на этап 41, а если да, пометить разлом как ближайший к или находящийся в непосредственной близости от разлома интерпретации, этап 51 по фиг.15. После выполнения этапов по фиг.15, если было определено, что один разлом (то есть разлом, являющийся интерпретируемым) близок к (или является ближайшим к или находится поблизости от) одному или более других разломов, теперь необходимо вычислять и определять кривую пересечения разлом-разлом между одним разломом и одним или более других разломов. Для того чтобы вычислять и определять кривую пересечения разлом-разлом между одним разломом и одним или более других разломов, процессор 10a по фиг.1 далее должен выполнять этапы по фиг.18, как изложено ниже (1). Осуществить доступ к модели интерпретированного разлома Fa и ее преобразованию, этап 53 на фиг.18 (2). Осуществить доступ к модели интеллектуально воспринятого разлома Fb и ее преобразованию, этап 55 на фиг.18 (3). Вычислить кривую пересечения (Fa-Fb) на протяжении VOI (действительного и мнимого) общей модели, этап 57 по фиг.18 (4). Получить расстояние соединения разлом-разлом D, этап 59 по фиг.18 (5). Вычислить экстраполированное замкнутым профилем гребня D за пределами данных Fa с использованием выбранного стиля замкнутого профиля гребня (изотропного и анизотропного), этап 61 по фиг.18 и (6). Переставить кривую пересечения в действительно оцененную внутри замкнутого профиля гребня, этап 63 на фиг.18.
Второй вариант осуществления программного обеспечения 12 моделирования разломов проиллюстрирован на фиг.4 и 5. Когда процессор 10a по фиг.1 выполняет второй вариант осуществления программного обеспечения 12 моделирования разломов, процессор 10a занимается осуществлением на практике способа для интерактивной автоматической обработки моделирования разломов, включающего в себя способ для интеллектуального распознавания взаимосвязей разлом-разлом, способ для интеллектуального распознавания взаимосвязей разлом-разлом включает в себя этап 1 и этап 2. Однако этап 1 включает в себя следующие дополнительные этапы с (1) по (7), как изложено ниже (1). Вычисление моделей каждого разлома, как будто бы каждый разлом был не связанным с любым другим разломом, этап 17 по фиг.4 (2). Сохранение несвязанных моделей каждого разлома современными по мере того, как создаются новые данные интерпретации, этап 19 по фиг.4 (3). Обнаружение условия, в соответствии с которым данные, ассоциативно связанные с одним разломом (то есть разломом, являющимся интерпретируемым), указывают, что разлом, являющийся интерпретируемым, близок к одному или более других разломов, этап 21 по фиг.4 (см. фиг.15 Обнаружения близости разлома) (4). Вычисление свойств взаимосвязи соединения между интерпретируемым разломом и одним или более других разломов, в том числе: кривой пересечения разлом-разлом и правила усечения, этап 23 по фиг.4 (5). Представление кривой пересечения одного или более потенциально связанных разломов интерпретатору интерпретатор подтверждает или опровергает в ответе, что взаимосвязь соединения между потенциально связанными разломами действительна, этап 25 по фиг.5 (6). Регистрация ответа от интерпретатора и, если взаимосвязь соединения подтверждена интерпретатором, вычисление оставшихся свойств взаимосвязи соединения, этап 27 по фиг.5 и (7). Добавление кривой пересечения и других свойств соединения, отображающих новые интерпретации, к разлому, которая вводит взаимосвязь соединения, с данными интерпретации, этап 29 по фиг.5. В дополнение, этап 2 включает в себя следующий дополнительный этап (8), как изложено ниже (8). Необязательное вычисление и отображение финальной модели для иллюстрации разломов в качестве являющихся соединенными, то есть в качестве являющихся пересекающимися, этап 31 по фиг.5. Вышеупомянутый дополнительный этап (3), который приспособлен для обнаружения условия, в соответствии с которым данные, ассоциативно связанные с одним разломом (то есть разломом, являющимся интерпретируемым), указывают, что разлом, являющийся интерпретируемым, близок к одному или более других разломов (этап 20 по фиг.2), фактически включает в себя другой способ, известный как Обнаружение близости разломов, который проиллюстрирован на фиг.15. На фиг.15, для того чтобы осуществлять на практике дополнительный этап (3) и обнаруживать условие, в соответствии с которым данные, ассоциативно связанные с одним разломом (то есть разломом, являющимся интерпретируемым), указывают, что разлом, являющийся интерпретируемым, близок к (либо является ближайшим к или находится поблизости от) одному или более других разломов, процессор 10a по фиг.1 теперь должен выполнять этапы по фиг.15, как изложено ниже (1). В связи с каждым разломом в инфраструктуре за исключением интерпретируемого разлома, этап 33 по фиг.15 (2). Следует ли игнорировать любые взаимосвязи с этим разломом, этап 35 на фиг.15 (3). Если да, возвратиться на этап 33, а если нет, осуществить доступ к модели разлома плоскости оптимального приближения и ее преобразованию, этап 37 по фиг.15 (4). Получить расстояние соединения разлом-разлом, этап 39 по фиг.15 (5). Для каждой новой точки P интерпретации, этап 41 по фиг.15 (6). Преобразовать P в координатное пространство плоскости оптимального приближения, этап 43 по фиг.15 (7). Проецировать P на разлом в качестве точки P' (то есть точки P штрих), этап 45 по фиг.15 (8). Точка P' (то есть точка P штрих) находится в действительной части разлома?, этап 47 по фиг.15 (9). Расстояние от P до P'<D? (то есть является ли расстояние от P до P штрих меньшим, чем D?), этап 49 по фиг.15 (10). Если нет, вернуться на этап 41, а если да, пометить разлом как ближайший к или находящийся в непосредственной близости от разлома интерпретации, этап 51 по фиг.15. После выполнения этапов по фиг.15, если было определено, что один разлом (то есть разлом, являющийся интерпретируемым) близок к (или является ближайшим к или находится поблизости от) одному или более других разломов, теперь необходимо вычислять и определять кривую пересечения разлом-разлом между одним разломом и одним или более других разломов. Для того чтобы вычислять и определять кривую пересечения разлом-разлом между одним разломом и одним или более других разломов, процессор 10a по фиг.1 далее должен выполнять этапы по фиг.18, как изложено ниже (1). Осуществить доступ к модели интерпретированного разлома Fa и ее преобразованию, этап 53 на фиг.18 (2). Осуществить доступ к модели интеллектуально воспринятого разлома Fb и ее преобразованию, этап 55 на фиг.18 (3). Вычислить кривую пересечения (Fa-Fb) на протяжении VOI (действительного и мнимого) общей модели, этап 57 по фиг.18 (4). Получить расстояние соединения разлом-разлом D, этап 59 по фиг.18 (5). Вычислить экстраполированное замкнутым профилем гребня D за пределами данных Fa с использованием выбранного стиля замкнутого профиля гребня (изотропного и анизотропного), этап 61 по фиг.18 и (6). Переставить кривую пересечения в действительно оцененную внутри замкнутого профиля гребня, этап 63 на фиг.18.
На фиг.19, 20 и 21, когда сформирована финальная модель (и вспомним, что один из примеров финальной модели проиллюстрирован на фиг.19), узнается расположение горизонтов 140, 142 и поверхности 58 разлома, как показано на фиг.20. В частности, может узнаваться расположение нефти и/или газа в точке или местоположении 154 между горизонтом 140 и поверхностью 58 разлома по фиг.20. Когда расположение нефти и/или газа в точке или местоположении 154 по фиг.20 известно, буровая установка 101, как показано на фиг.21, может использоваться для извлечения нефти и/или газа из точки или местоположения 154 по фиг.20.
Вышеприведенное описание Программного обеспечения моделирования разломов таким образом является описанным, будет очевидно, что таковое может быть изменено многими способами. Такие варианты не должны рассматриваться в качестве выходящих из сущности и объема заявленных формулой изобретения способа или системы либо запоминающего устройства для хранения программ или компьютерной программы, и все те модификации, которые были бы очевидны специалисту в данной области техники, подразумеваются включенными в объем последующей формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЗИРОВАННОГО ПРОЦЕССА ГЕОЛОГИЧЕСКОЙ ПРОВОДКИ СКВАЖИН И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2720115C1 |
| СТРАТИГРАФИЧЕСКАЯ И СТРУКТУРНАЯ ИНТЕРПРЕТАЦИЯ НАКЛОННЫХ И ГОРИЗОНТАЛЬНЫХ СТВОЛОВ СКВАЖИН | 2014 |
|
RU2652172C2 |
| СТРАТИГРАФИЯ СЕЙСМИЧЕСКИХ ТРАСС ДЛЯ ИНТЕРПРЕТАЦИИ ГЕОЛОГИЧЕСКИХ РАЗЛОМОВ | 2013 |
|
RU2594377C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО ПОСТРОЕНИЯ ГЕОЛОГИЧЕСКОЙ МОДЕЛИ ЗАЛЕЖИ | 2020 |
|
RU2799775C2 |
| СПОСОБ И СИСТЕМА ПРОВЕДЕНИЯ АНАЛИЗА ГЕОЛОГИЧЕСКОГО БАССЕЙНА | 2010 |
|
RU2491579C2 |
| СПОСОБ ГЕНЕРИРОВАНИЯ ЧИСЛЕННЫХ ПСЕВДОКЕРНОВ С ИСПОЛЬЗОВАНИЕМ ИЗОБРАЖЕНИЙ СКВАЖИНЫ, ЦИФРОВЫХ ОБРАЗОВ ПОРОДЫ И МНОГОТОЧЕЧНОЙ СТАТИСТИКИ | 2009 |
|
RU2444031C2 |
| СПОСОБ ПОСТРОЕНИЯ ОБРАТИМОЙ ТРЕХМЕРНОЙ ГИДРОДИНАМИЧЕСКОЙ МОДЕЛИ ЗЕМЛИ, КАЛИБРУЕМОЙ В РЕАЛЬНОМ ВРЕМЕНИ В ПРОЦЕССЕ БУРЕНИЯ | 2004 |
|
RU2321064C2 |
| ПРОГНОЗИРОВАНИЕ СВОЙСТВ ПОДЗЕМНОЙ ФОРМАЦИИ | 2008 |
|
RU2462755C2 |
| ИНТЕЛЛЕКТУАЛЬНАЯ ГРИД-СИСТЕМА ДЛЯ ВЫСОКОПРОИЗВОДИТЕЛЬНОЙ ОБРАБОТКИ ДАННЫХ | 2009 |
|
RU2411574C2 |
| СПОСОБ ПРОВЕРКИ ГЕОМЕТРИИ ТРЕЩИНЫ ДЛЯ МИКРОСЕЙСМИЧЕСКИХ СОБЫТИЙ | 2014 |
|
RU2637255C2 |
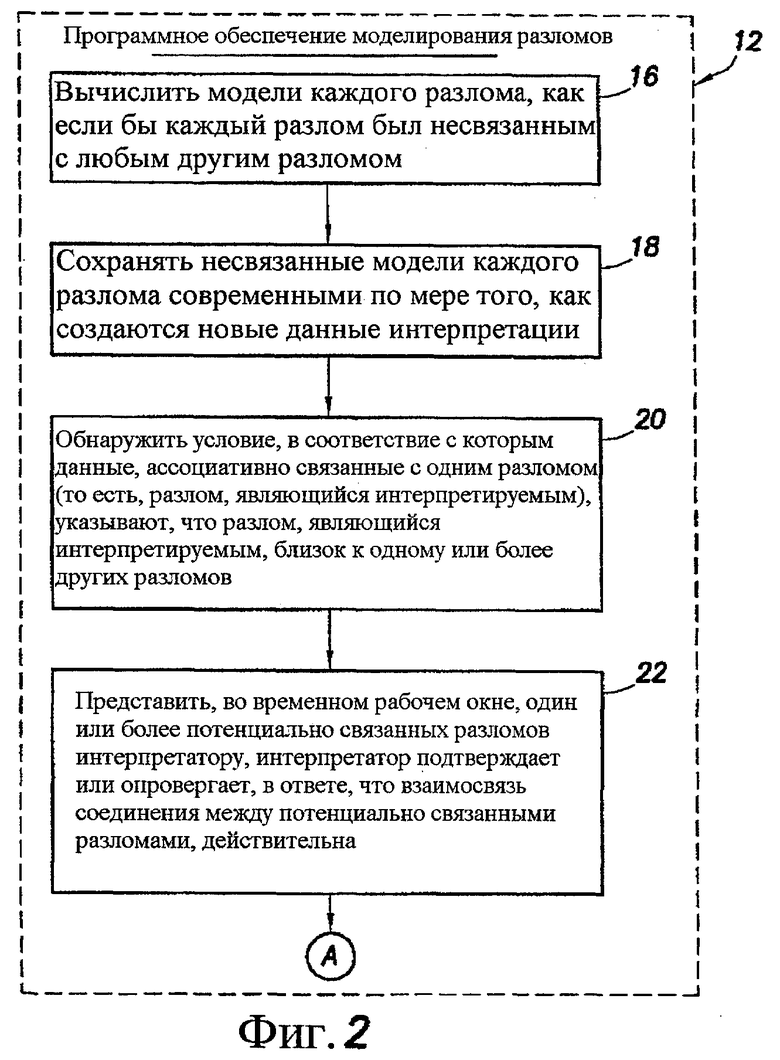

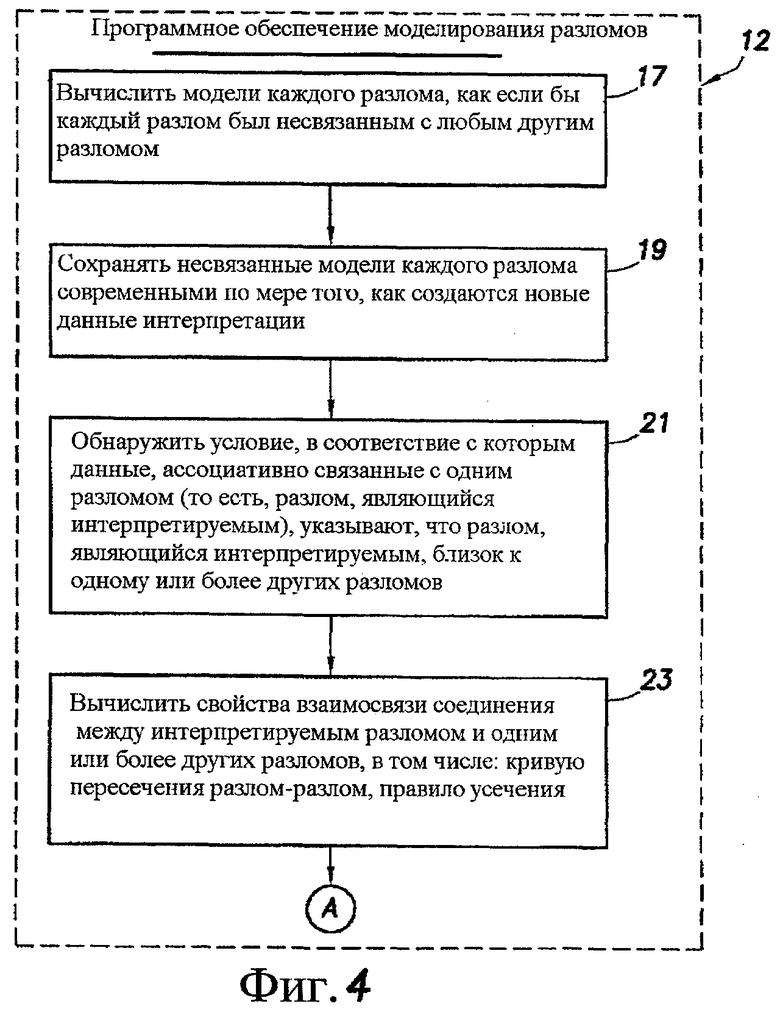
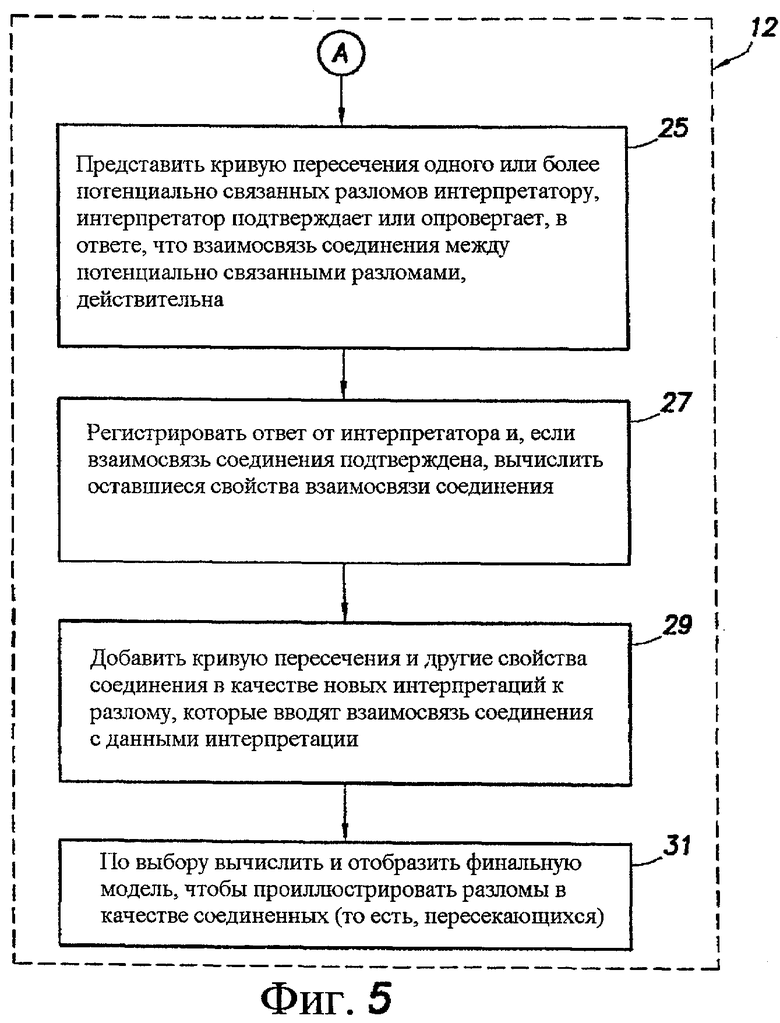
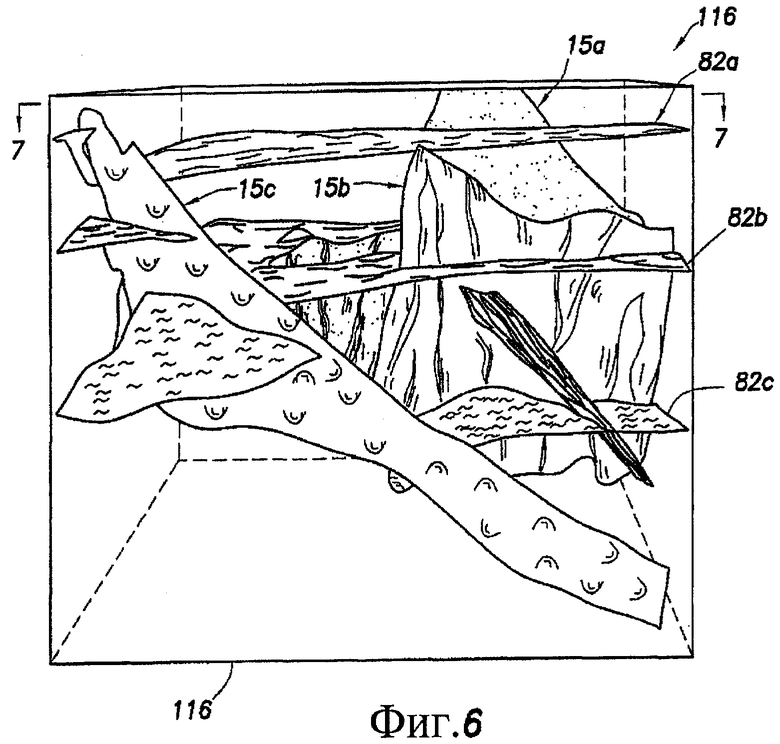
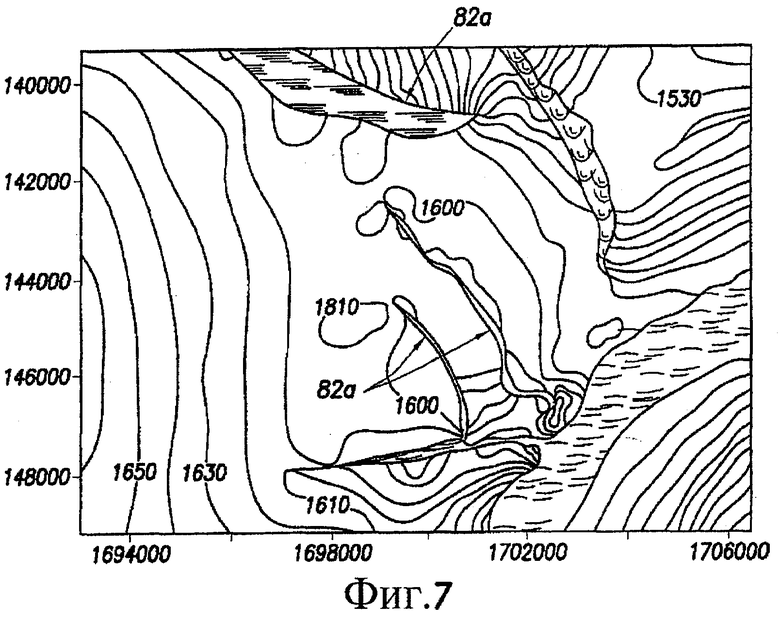
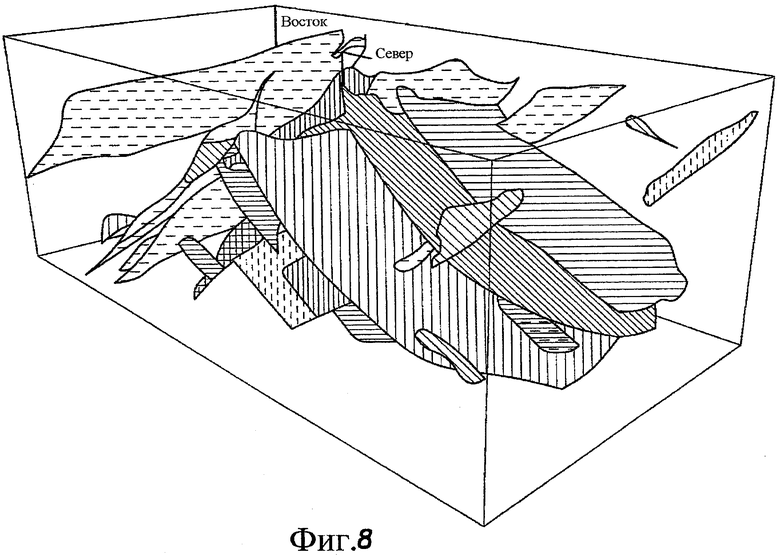
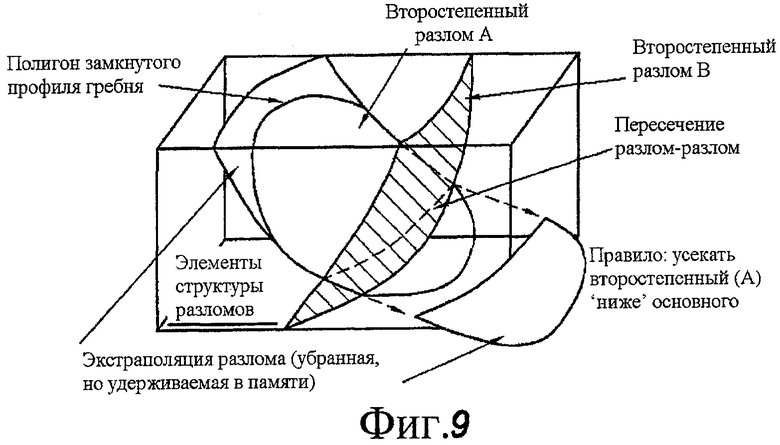
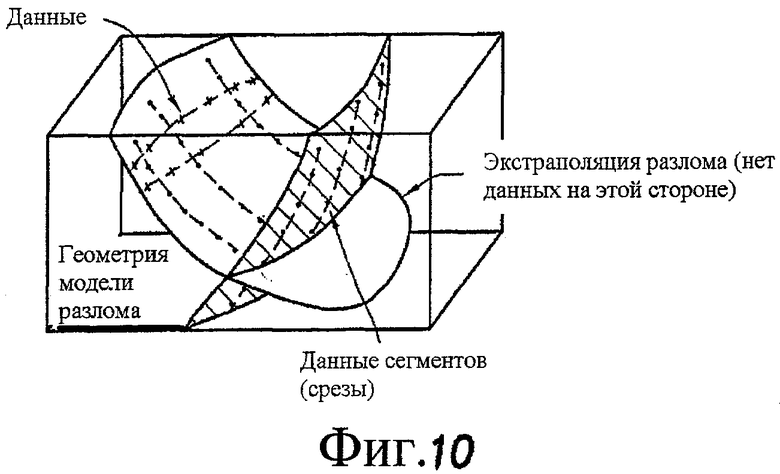
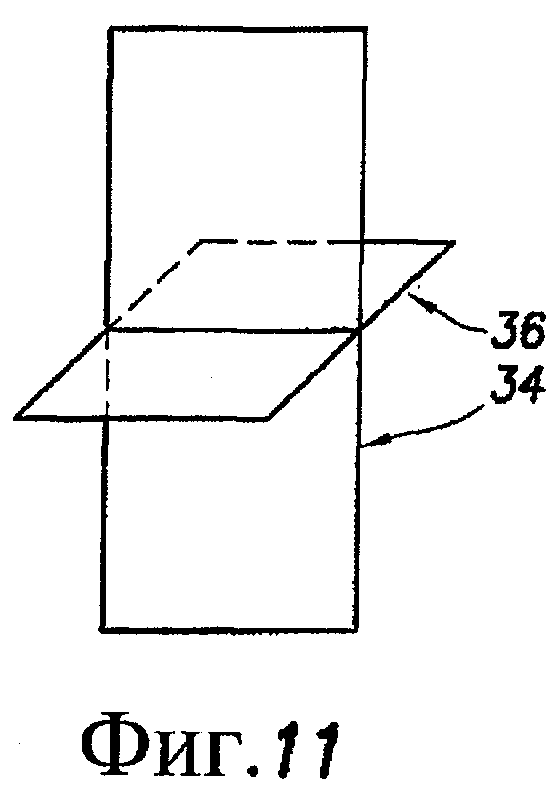
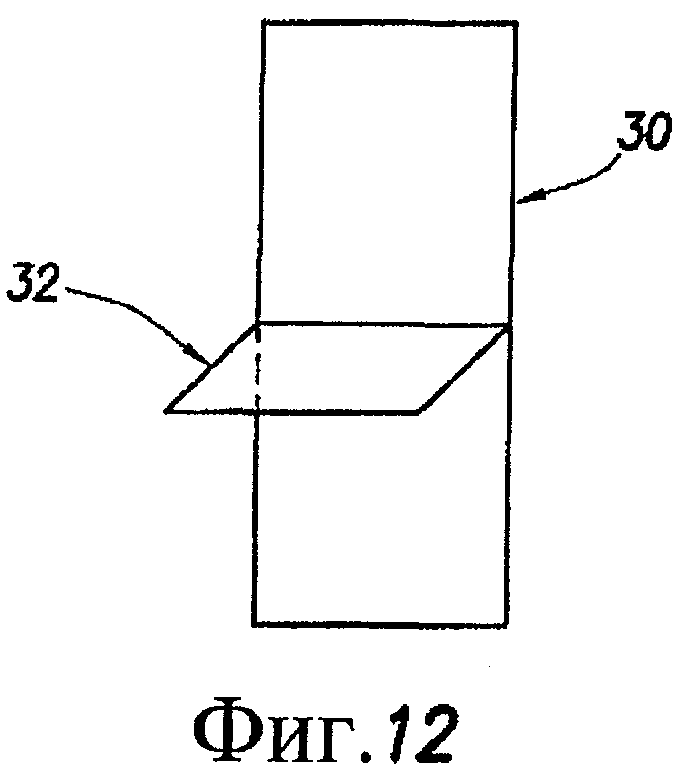
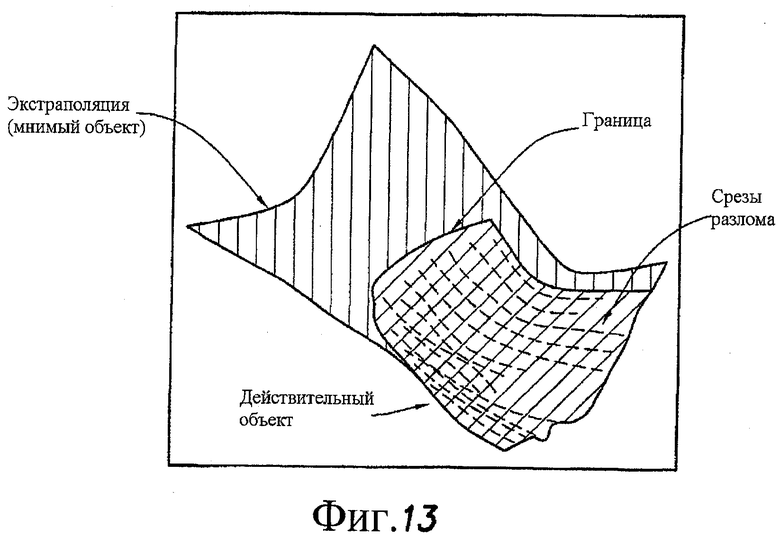
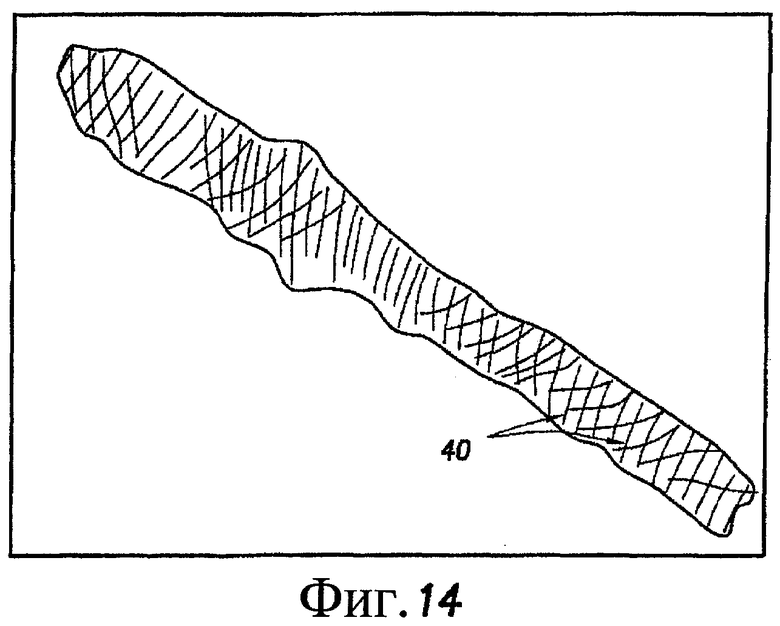
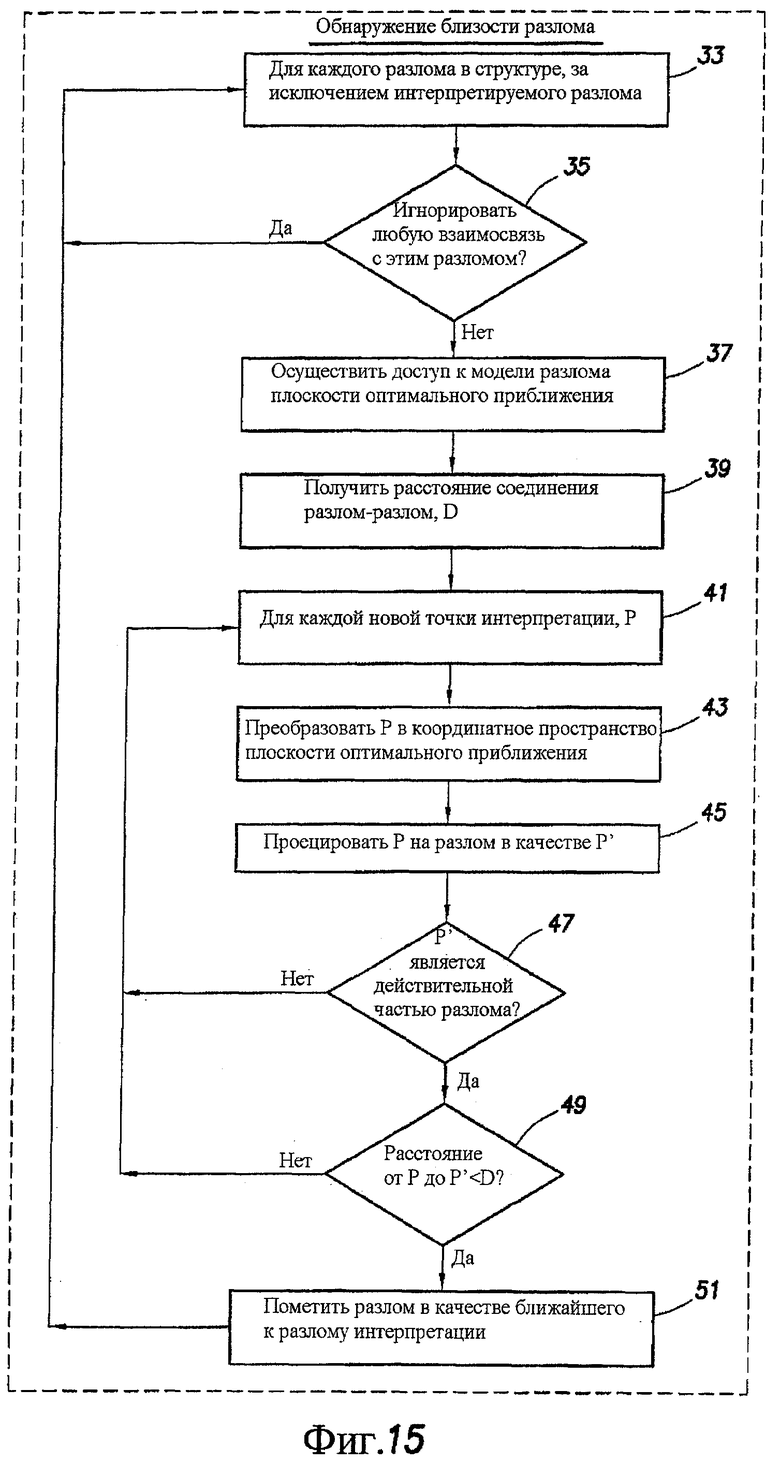
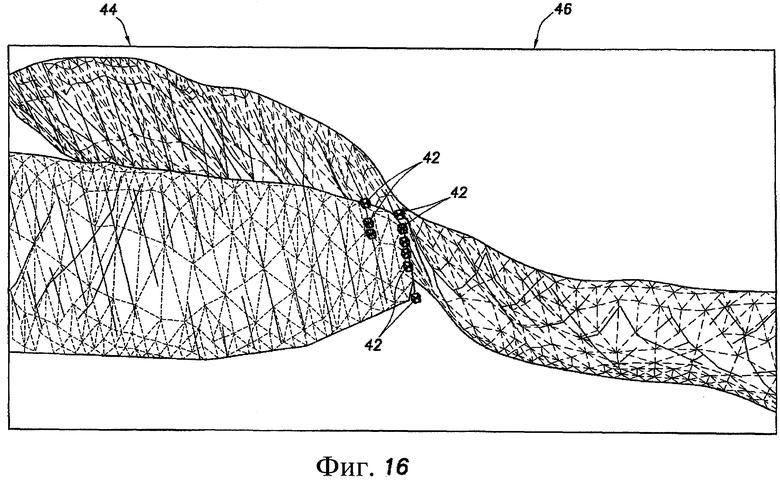
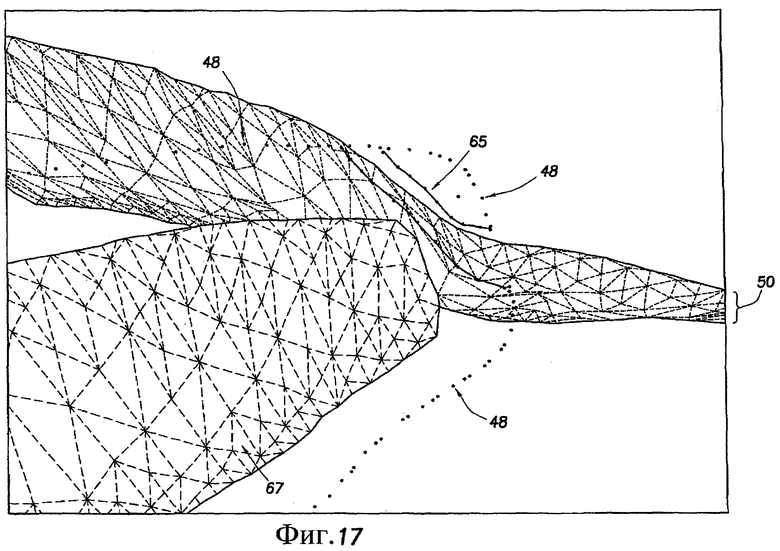
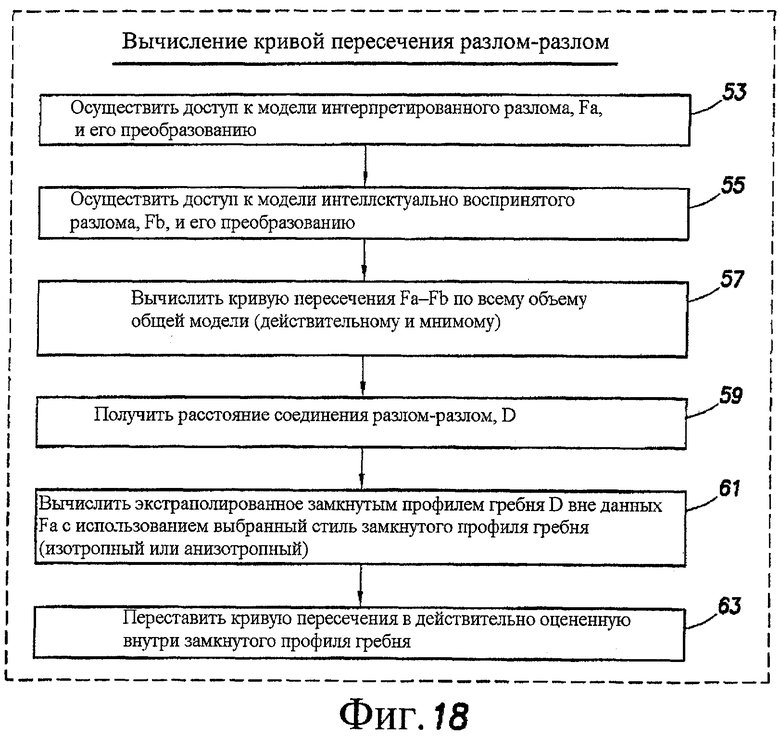
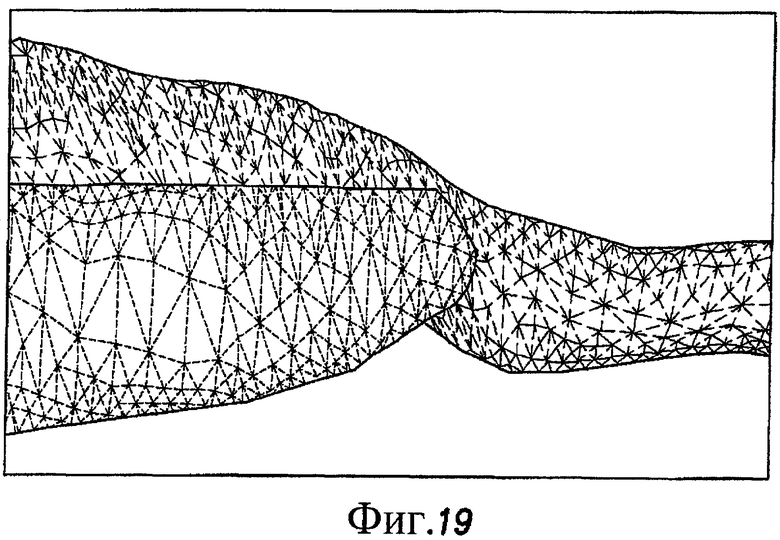
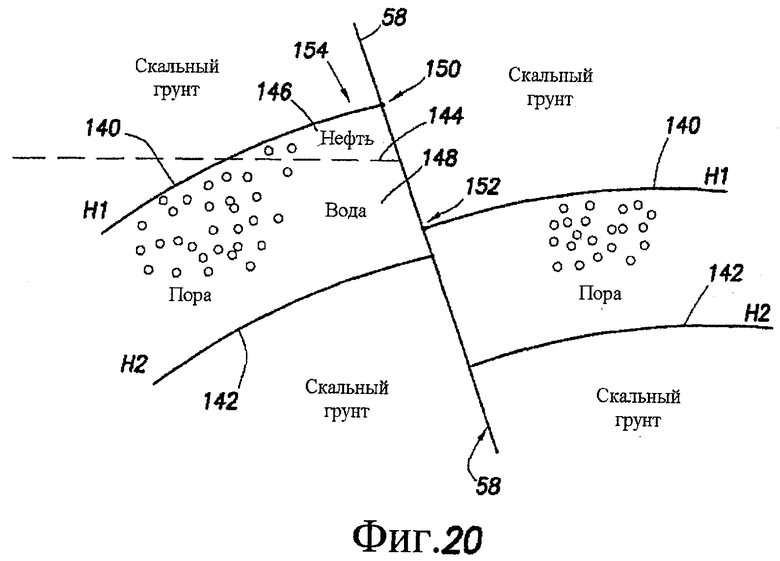
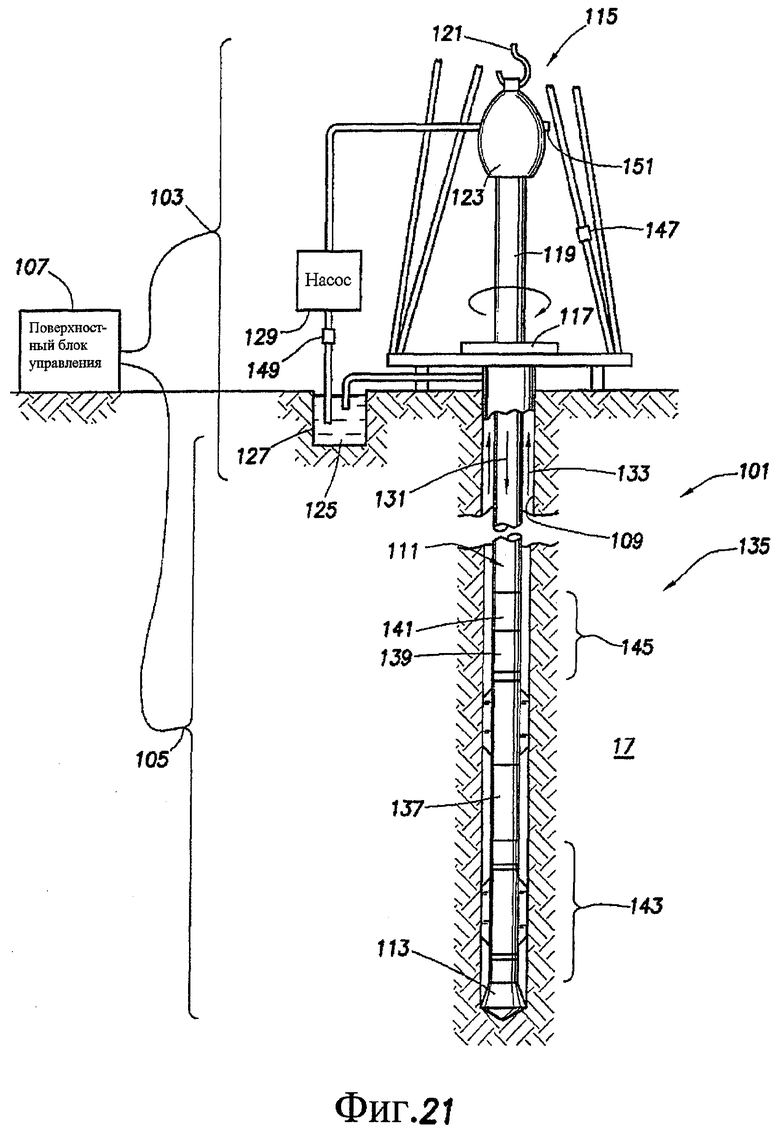
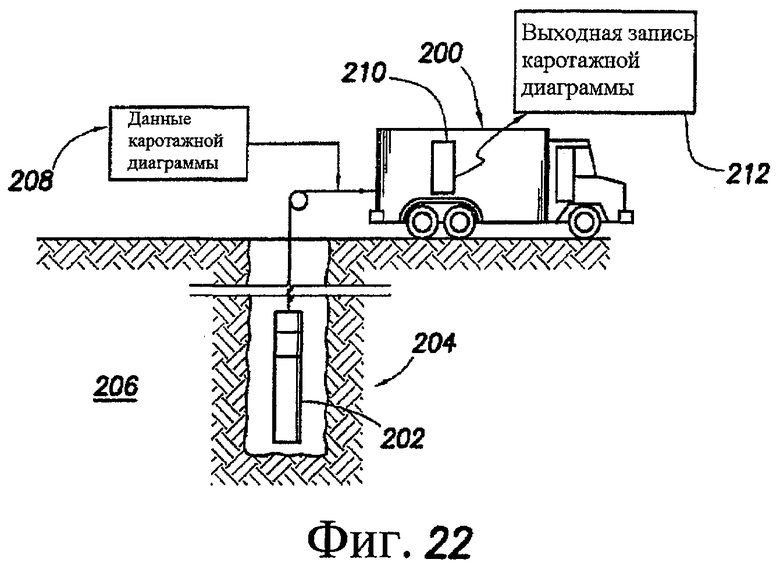
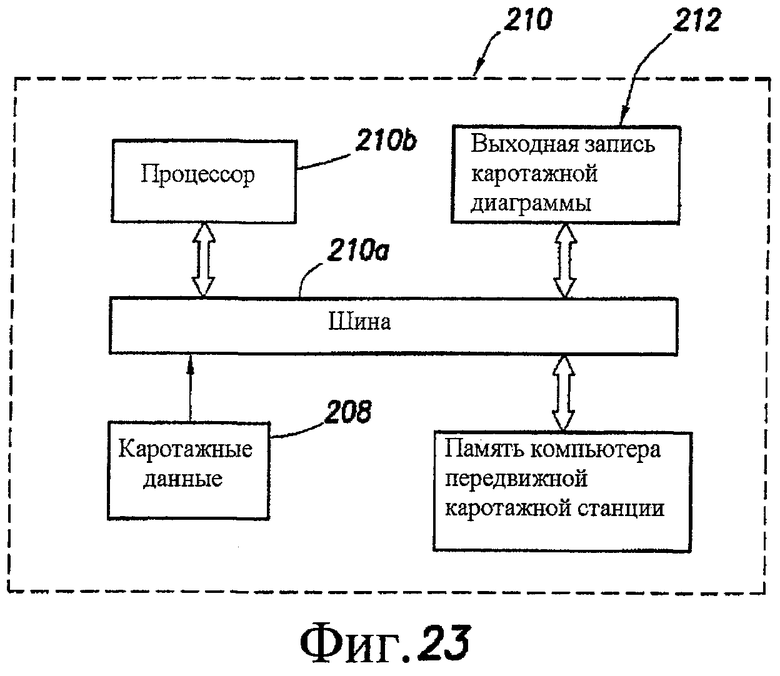
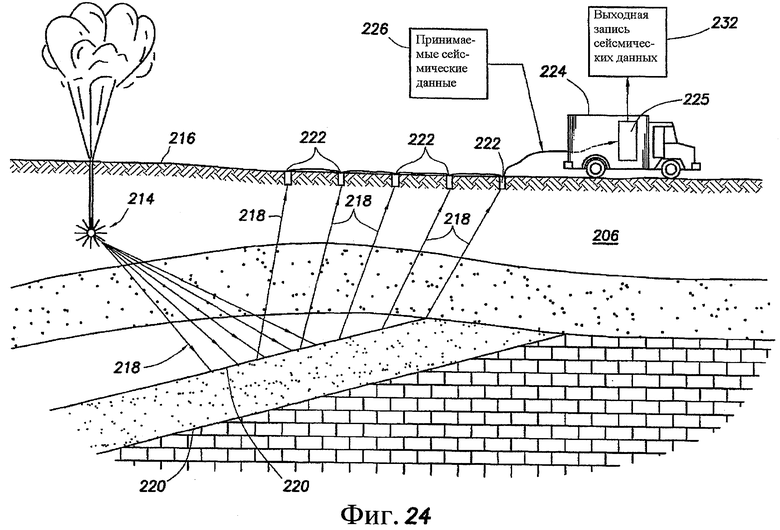
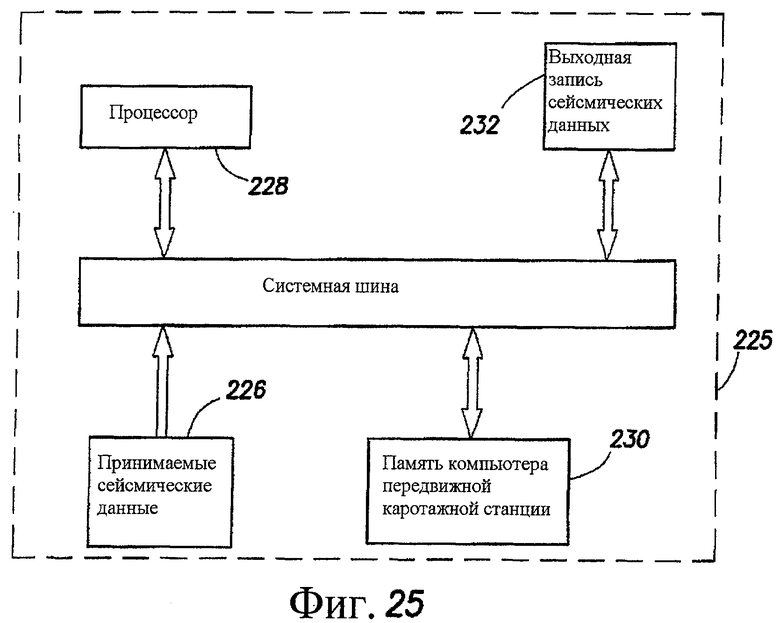
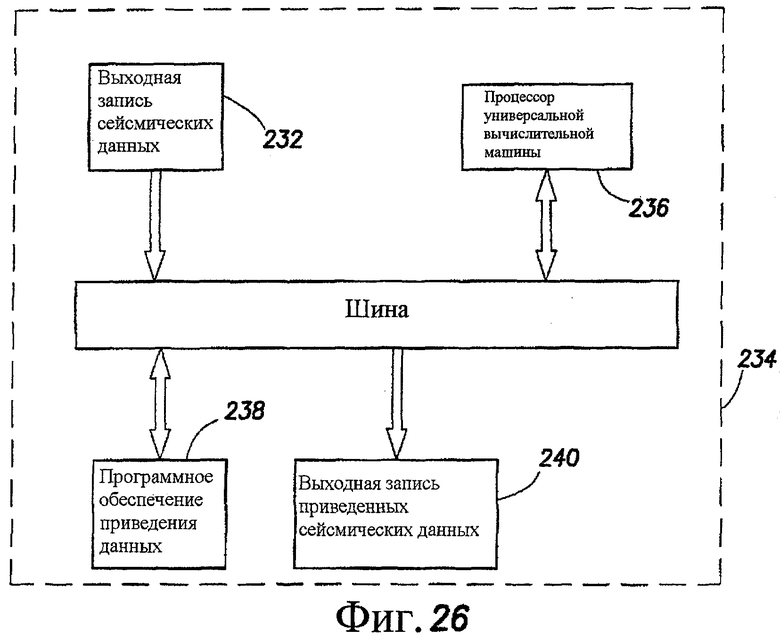
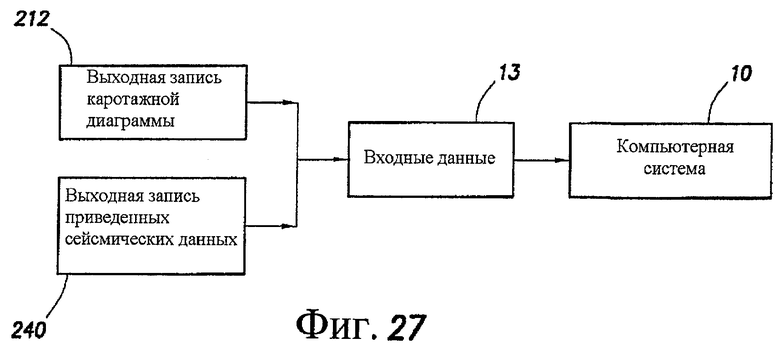
Объект изобретения, раскрытый в этом описании изобретения, относится к способу и соответствующей системе для интерактивной автоматической обработки моделирования разломов и, в частности, к способу для интеллектуального распознавания взаимосвязей разлом-разлом в качестве части последовательности операций интерпретации разлома. Раскрыт способ для распознавания взаимосвязей разлом-разлом, содержащий: автоматическое распознавание взаимосвязей между разломами и представление финальной модели, включающей в себя кривую пересечения разлом-разлом и один разлом, усеченный по кривой, интерпретатору с отображением взаимосвязей между разломами. Во время интерпретации применяются фоновые процессы моделирования, которые представляют автоматически распознаваемые взаимосвязи между разломами. Эти фоновые процессы (позже вновь обсужденные в этом описании изобретения) автоматически формируют поверхности разломов во время интерпретации и обнаруживают их относительную близость. Способ интерактивной автоматической обработки моделирования разломов, обеспечивает усовершенствования или улучшения в способе, которым моделируются структуры разломов в пласте, в качестве встроенной части интерпретации разлома. 7 н. и 21 з.п. ф-лы, 27 ил.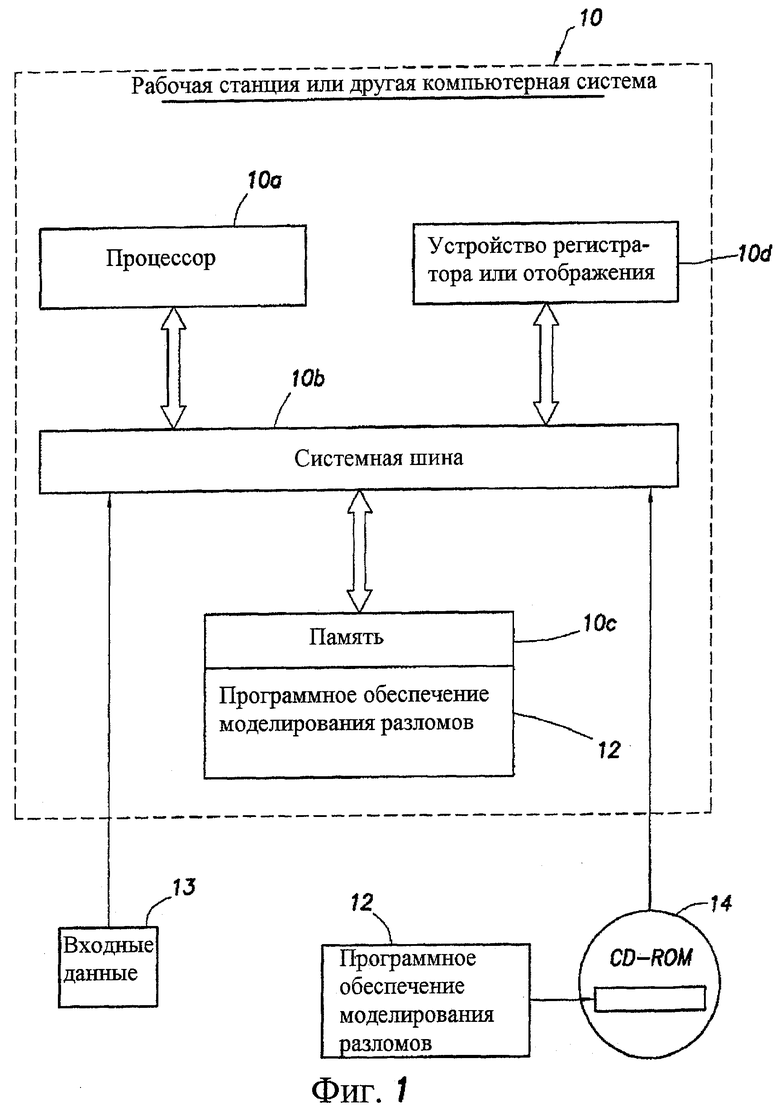
1. Способ для интерактивной автоматической обработки моделирования разломов, состоящий в том, что:
распознают взаимосвязь разлом-разлом между парой разломов, причем этап распознавания состоит в том, что:
представляют во временном рабочем окне или мерцанием на устройстве отображения кривую пересечения разлом-разлом, один или более потенциально связанных разломов интерпретатору, интерпретатор подтверждает или опровергает в ответе, что взаимосвязь соединения между потенциально связанными разломами действительна;
вычисляют модели каждого разлома, как если бы каждый был несвязанным с любым другим разломом;
и отображают финальную модель, которая включает в себя пару разломов, финальная модель иллюстрирует пару разломов в качестве являющихся взаимосвязанными.
2. Способ по п.1, в котором этап распознавания состоит в том, что: сохраняют несвязанные модели каждого разлома актуальными по мере того, как создаются новые данные интерпретации.
3. Способ по п.2, в котором этап распознавания состоит в том, что: обнаруживают условие, где данные указывают, что разлом, являющийся интерпретируемым, близок к одному или более другим разломам, в силу этого идентифицируют один или более потенциально связанных разломов.
4. Способ по п.1, в котором этап распознавания состоит в том, что: регистрируют ответ и, если взаимосвязь соединения подтверждена интерпретатором, вычисляют все оставшиеся свойства взаимосвязи соединения, не вычисленные до этого.
5. Способ по п.4, в котором этап распознавания состоит в том, что: добавляют свойства типа пересечения в качестве новых интерпретаций к разлому, являющемуся интерпретируемым, в силу этого, вводят взаимосвязь соединения с набором данных интерпретации.
6. Способ по п.5, в котором этап распознавания состоит в том, что: вычисляют упомянутую финальную модель, которая включает в себя пару разломов, финальная модель иллюстрирует пару разломов в качестве являющихся соединенными, этап вычисления заключается в том, что сохраняют модели пересекающихся разломов актуальными по мере того, как создаются новые данные интерпретации, посредством того, что вычисляют финальную модель каждого разлома и вычисляют финальную кривую пересечения, вдоль которой один разлом пересекает другой разлом, и где один разлом завершается или усекается упомянутым другим разломом.
7. Способ по п.3, в котором этап обнаружения условия, где данные указывают, что разлом, являющийся интерпретируемым, близок к одному или более другим разломам, состоит в том, что:
в связи с упомянутым одним или более разломами в инфраструктуре, не включающей в себя разлом, являющийся интерпретируемым, определяют, должна ли игнорироваться взаимосвязь между упомянутым интерпретируемым разломом и каждым разломом из числа упомянутых одного или более разломов;
при условии, что упомянутая взаимосвязь не должна игнорироваться, осуществляют доступ к модели разлома плоскости оптимального приближения и ее преобразованию,
получают расстояние соединения разлом-разлом,
для каждой новой точки 'Р' интерпретации, преобразуют 'Р' в координатное пространство плоскости оптимального приближения,
подтверждают, что 'Р' проецируется на действительную часть упомянутого каждого разлома,
проецируют 'Р' на упомянутый каждый разлом в качестве точки 'Р штрих', определяют, находится ли 'Р штрих' в действительной части разлома, определяют, является ли расстояние от 'Р' до 'Р штрих' меньшим, чем D, при условии, что 'Р штрих' находится в действительной части разлома, а расстояние от 'Р' до 'Р штрих' является меньшим, чем D, помечают упомянутый каждый разлом в качестве являющегося близким к разлому, являющемуся интерпретируемым.
8. Способ по п.3, в котором этап сохранения несвязанных моделей каждого разлома актуальными по мере того, как создаются новые данные интерпретации, состоит в том, что:
сохраняют полную инфраструктуру разломов актуальной в тех случаях, когда некоторые разломы структуры являются независящими, и некоторые разломы структуры являются непересекающимися.
9. Способ по п.6, в котором этап вычисления упомянутой финальной модели, которая включает в себя пару разломов, состоит в том, что: сохраняют полную инфраструктуру разломов актуальной в тех случаях, когда некоторые разломы структуры являются независящими, и некоторые разломы структуры являются непересекающимися, а некоторые разломы структуры являются пересекающимися.
10. Способ моделирования разломов, упомянутый способ состоит в том, что:
вычисляют модели одного или более разломов, как если бы каждый разлом был несвязанным с любым другим разломом;
обнаруживают условие, при котором данные, ассоциативно связанные с одним разломом, являющимся интерпретируемым, указывают, что разлом близок к одному или более другим разломам, один разлом и один или более других разломов являются потенциально связанными разломами;
причем этап обнаружения условия, где данные, ассоциативно связанные с одним разломом, являющимся интерпретируемым, указывают, что разлом близок к одному или более другим разломам, состоит в том, что:
в связи с упомянутым одним или более разломами в инфраструктуре, не включающей в себя разлом, являющийся интерпретируемым, определяют, должна ли игнорироваться взаимосвязь между упомянутым интерпретируемым разломом и каждым разломом из числа упомянутых одного или более разломов;
при условии, что упомянутая взаимосвязь не должна игнорироваться, осуществляют доступ к модели разлома плоскости оптимального приближения и ее преобразованию,
получают расстояние соединения разлом-разлом,
для каждой новой точки 'Р' интерпретации преобразуют 'Р' в координатное пространство плоскости оптимального приближения,
подтверждают, что 'Р' проецируется на действительную часть упомянутого каждого разлома,
проецируют 'Р' на упомянутый каждый разлом в качестве точки 'Р штрих', определяют, находится ли 'Р штрих' в действительной части разлома,
определяют, является ли расстояние от 'Р' до 'Р штрих' меньшим, чем D, при условии, что 'Р штрих' находится в действительной части разлома, а расстояние от 'Р' до 'Р штрих' является меньшим, чем D, помечают упомянутый каждый разлом в качестве являющегося близким к разлому, являющемуся интерпретируемым,
представляют один или более потенциально связанных разломов интерпретатору, интерпретатор подтверждает или опровергает, что взаимосвязь соединения существует между потенциально связанными разломами; и
вычисляют взаимосвязь соединения между потенциально связанными разломами, в силу этого формируют финальную модель при условии, что интерпретатор подтверждает, что взаимосвязь соединения существует между потенциально связанными разломами.
11. Способ по п.10, в котором этап вычисления моделей одного или более разломов, как если бы каждый разлом был несвязанным с любым другим разломом, состоит в том, что:
вычисляют модели одного или более разломов, как если бы каждый разлом был несвязанным с любым другим разломом; и
сохраняют несвязанные модели каждого разлома актуальными по мере того, как создаются новые данные интерпретации.
12. Способ по п.11, дополнительно состоящий в том, что:
вычисляют и отображают финальную модель, чтобы проиллюстрировать разломы финальной модели в качестве являющихся соединенными.
13. Система, выполненная с возможностью для интеллектуального распознавания взаимосвязей разлом-разлом в качестве части последовательности операций интерпретации разлома, упомянутая система содержит:
первое устройство, выполненное с возможностью для вычисления моделей одного или более разломов, как если бы каждый разлом был несвязанным с любым другим разломом;
второе устройство, выполненное с возможностью для обнаружения условий, в которых данные, ассоциативно связанные с одним разломом, являющимся интерпретируемым, указывают, что разлом близок к одному или более другим разломам, один разлом и один или более других разломов являются потенциально связанными разломами;
третье устройство, выполненное с возможностью представления одного или более потенциально связанных разломов интерпретатору, интерпретатор подтверждает или опровергает, что взаимосвязь соединения существует между потенциально связанными разломами; и
четвертое устройство, выполненное с возможностью вычисления взаимосвязи соединения между потенциально связанными разломами, в силу этого формирования финальной модели при условии, что интерпретатор подтверждает, что взаимосвязь соединения существует между потенциально связанными разломами.
14. Система по п.13, в которой первое устройство, выполненное с возможностью вычисления моделей одного или более разломов, как если бы каждый разлом был несвязанным с любым другим разломом, содержит: устройство, выполненное с возможностью вычисления моделей одного или более разломов, как если бы каждый разлом был несвязанным с любым другим разломом; и
устройство, выполненное с возможностью для сохранения несвязанных моделей каждого разлома актуальными по мере того, как создаются новые данные интерпретации.
15. Система по п.14, дополнительно содержащая:
пятое устройство, выполненное с возможностью вычисления и отображения финальной модели, чтобы иллюстрировать разломы финальной модели в качестве являющихся соединенными.
16. Система по п.14, в которой упомянутое второе устройство, выполненное с возможностью обнаружения условия, при котором данные, ассоциативно связанные с одним разломом, являющимся интерпретируемым, указывают, что разлом близок к одному или более другим разломам, содержит:
в связи с упомянутым одним или более разломов в инфраструктуре, не включающей в себя разлом, являющийся интерпретируемым, устройство, выполненное с возможностью определения, должна ли игнорироваться взаимосвязь между упомянутым интерпретируемым разломом и каждым разломом из числа упомянутых одного или более разломов;
при условии, что упомянутая взаимосвязь не должна игнорироваться, устройство, выполненное с возможностью осуществления доступа к модели разлома плоскости оптимального приближения и ее преобразованию,
устройство, выполненное с возможностью получения расстояния соединения разлом-разлом,
для каждой новой точки 'Р' интерпретации устройство, выполненное с возможностью преобразования 'Р' в координатное пространство плоскости оптимального приближения,
устройство, выполненное с возможностью подтверждения, что 'Р' проецируется на действительную часть упомянутого каждого разлома,
устройство, выполненное с возможностью проецирования 'Р' на упомянутый каждый разлом в качестве точки 'Р штрих',
устройство, выполненное с возможностью определения, находится ли 'Р штрих' в действительной части разлома,
устройство, выполненное с возможностью определения, является ли расстояние от 'Р' до 'Р штрих' меньшим, чем D,
при условии, что 'Р штрих' находится в действительной части разлома, а расстояние от 'Р' до 'Р штрих' является меньшим, чем D, устройство, выполненное с возможностью пометки упомянутого каждого разлома в качестве являющегося близким к разлому, являющемуся интерпретируемым.
17. Система, выполненная с возможностью интерактивной автоматической обработки моделирования разломов, содержащая:
первое устройство, выполненное с возможностью распознавания взаимосвязи разлом-разлом между парой разломов; и
второе устройство, выполненное с возможностью отображения финальной модели, которая включает в себя пару разломов, финальная модель иллюстрирует пару разломов в качестве являющихся соединенными.
18. Способ моделирования разломов, состоящий в том, что:
автоматически распознают взаимосвязи между разломами,
причем этап распознавания состоит в том, что:
вычисляют модели каждого разлома, как если бы каждый разлом был несвязанным с любым другим разломом;
сохраняют несвязанные модели каждого разлома актуальными по мере того, как создаются новые данные интерпретации, и
обнаруживают условие, при котором данные, ассоциативно связанные с разломом, являющимся интерпретируемым, указывают, что разлом, являющийся интерпретируемым, близок к одному или более другим разломам, упомянутый разлом является близким к упомянутому одному или более разломам при условии, что расстояние от 'Р' до 'Р штрих' является меньшим, чем D, и вычисляют кривую пересечения разлом-разлом и
представляют финальную модель, включающую в себя кривую пересечения разлом-разлом и один разлом, усеченный по кривой, интерпретатору с отображением взаимосвязей между разломами.
19. Способ по п.18, дополнительно состоящий в том, что: представляют, во временном рабочем окне, один или более потенциально связанных разломов интерпретатору, интерпретатор подтверждает или опровергает в ответе, что взаимосвязь соединения между потенциально связанными разломами действительна.
20. Способ по п.19, дополнительно состоящий в том, что:
регистрируют ответ от интерпретатора и, если взаимосвязь соединения подтверждена интерпретатором, вычисляют все свойства взаимосвязи соединения; и
добавляют кривую пересечения и другие свойства соединения, отображающие новые интерпретации, к разлому, которые вводят свойства соединения с набором данных интерпретации.
21. Способ по п.20, дополнительно состоящий в том, что:
вычисляют и отображают финальную модель, чтобы проиллюстрировать разломы в качестве являющихся соединенными или пересекающимися.
22. Способ по п.18, дополнительно состоящий в том, что:
вычисляют свойства взаимосвязи соединения между интерпретируемым разломом и одним или более другими разломами, в том числе кривую пересечения разлом-разлом и правило усечения; и
представляют кривую пересечения одного или более потенциально связанных разломов интерпретатору, интерпретатор подтверждает или опровергает в ответе, что взаимосвязь соединения между потенциально связанными разломами действительна.
23. Способ по п.22, дополнительно состоящий в том, что:
регистрируют ответ от интерпретатора и, если взаимосвязь соединения подтверждена интерпретатором, вычисляют оставшиеся свойства взаимосвязи соединения; и
добавляют кривую пересечения и другие свойства соединения, отображающие новые интерпретации, к разлому, который вводит взаимосвязь соединения с набором данных интерпретации.
24. Способ по п.23, дополнительно состоящий в том, что:
вычисляют и отображают финальную модель, чтобы проиллюстрировать разломы в качестве являющихся соединенными или пересекающимися.
25. Способ по п.18, в котором этап обнаружения условия, в соответствии с которым данные, ассоциативно связанные с разломом, являющимся интерпретируемым, указывают, что разлом, являющийся интерпретируемым, близок к одному или более другим разломам, состоит в том, что:
в связи с упомянутым одним или более разломами в инфраструктуре, не включающей в себя разлом, являющийся интерпретируемым, определяют, должна ли игнорироваться взаимосвязь между упомянутым интерпретируемым разломом и каждым разломом из числа упомянутых одного или более разломов;
при условии, что упомянутая взаимосвязь не должна игнорироваться, осуществляют доступ к модели разлома плоскости оптимального приближения и ее преобразованию,
получают расстояние соединения разлом-разлом,
для каждой новой точки 'Р' интерпретации преобразуют 'Р' в координатное пространство плоскости оптимального приближения,
проецируют 'Р' на упомянутый каждый разлом в качестве точки 'Р штрих', определяют, находится ли 'Р штрих' в действительной части разлома,
определяют, является ли расстояние от 'Р' до 'Р штрих1 меньшим, чем D, при условии, что 'Р штрих' находится в действительной части разлома, а расстояние от 'Р' до 'Р штрих' является меньшим, чем D, помечают упомянутый каждый разлом в качестве являющегося близким к разлому, являющемуся интерпретируемым.
26. Способ по п.18, в котором этап вычисления упомянутой кривой пересечения разлом-разлом состоит в том, что:
осуществляют доступ к модели интерпретированного разлома, Fa, и ее преобразованию,
осуществляют доступ к модели интеллектуально воспринятого разлома, Fb, и ее преобразованию,
вычисляют кривую пересечения (Fa-Fb) на всем протяжении общей модели в интересующем объеме,
получают расстояние D соединения разлом-разлом,
вычисляют экстраполированное замкнутым профилем гребня D вне данных Fa с использованием выбранного стиля замкнутого профиля гребня, и
переставляют кривую пересечения в действительно оцененную внутри замкнутого профиля гребня.
27. Запоминающий носитель для хранения программ, читаемый машиной, реально воплощающий набор команд, исполняемых машиной для выполнения этапов способа по любому из пп.1-9, 10-12, 18 и 19-26.
28. Система, выполненная с возможностью распознавания взаимосвязей разлом-разлом, содержащая:
устройство, выполненное с возможностью автоматического распознавания взаимосвязей между разломами, и
устройство, выполненное с возможностью представления финальной модели, включающей в себя кривую пересечения разлом-разлом и один разлом, усеченный по кривой, интерпретатору с отображением взаимосвязей между разломами.
| US 6014343 А, 11.01.2000 | |||
| US 5982707 А, 09.11.1999 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБРАБОТКИ СЕЙСМИЧЕСКОГО СИГНАЛА И ПРОВЕДЕНИЯ РАЗВЕДКИ ПОЛЕЗНЫХ ИСКОПАЕМЫХ | 1996 |
|
RU2187130C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБРАБОТКИ СЕЙСМИЧЕСКОГО СИГНАЛА И ПРОВЕДЕНИЯ РАЗВЕДКИ ПОЛЕЗНЫХ ИСКОПАЕМЫХ | 1997 |
|
RU2169931C2 |

