ОБЛАСТЬ ТЕХНИКИ
Заявленное решение относится к области вычислительного моделирования для автоматизации процесса геонавигации в местах бурения скважин.
УРОВЕНЬ ТЕХНИКИ
Успешность процесса строительства нефтяных и газовых скважин определяется не только краткосрочными параметрами, которые проявляются в ходе бурения, но и долгосрочными показателями, которые становятся очевидны в ходе эксплуатации. Задача геологов и специалистов по геологической проводке состоит не только в безопасном, быстром и эффективном процессе геонавигации, но и в максимальном отдалении сроков обводнения, пескопроявления и капитального ремонта скважин.
Из уровня техники известен способ определения траектории скважины (RU 2560462, 20.08.2015). Указанный способ содержит: прием данных, характеризующих один или более параметров бурения между, по меньшей мере, двумя точками инклинометрии; усреднение полученных данных за заданные шаги приращения между указанными, по меньшей мере, двумя точками инклинометрии; расчет исходя из, по меньшей мере, указанных усредненных данных прогнозируемой реакции бурильной колонны для каждого из заданных шагов приращения; определение исходя из, по меньшей мере, указанной прогнозируемой реакции бурильной колонны изменения угла наклона и азимута для каждого из заданных шагов приращения; формирование прогнозируемой траектории скважины исходя из указанного изменения угла наклона и азимута; сравнение указанной прогнозируемой траектории скважины с измеренной траекторией скважины; и если результаты указанного сравнения приемлемы, определение вероятного положения скважины исходя из указанного изменения угла наклона и азимута для каждого из заданных шагов приращения.
Недостатками данного решения является недостаточная точность прогнозирования направления бурения скважины.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Основной проблемой при геонавигации является необходимость точного расположения ствола скважины, которая обусловлена наличием геологических неопределенностей и погрешностей измерений.
Технической проблемой, решаемой с помощью заявленного решения, является обеспечение автоматизированного процесса геонавигации при бурении скважины с высокой степенью достоверности расчетов по расположению ствола скважины.
Технический результат совпадает с решением технической проблемы и заключается в повышении точности определения положения ствола скважины в процессе ее бурения.
Дополнительным результатом является сокращение времени технологических геонавигационных работ за счет автоматизации процесса обработки массива данных с определением текущего и прогнозируемого расположения ствола скважины, а также повышение количества одновременно обрабатываемых скважин для целей геонавигации.
Одной из главных задач геонавигации является подбор углов падения пласта (как положение точек, в которых происходит изменение угла падения, так и подбор величин угла) таким образом, чтобы минимизировать расхождение между фактическими кривыми и синтетическими кривыми, полученными за счет моделирования (стратиграфическое моделирование, классическое сравнение, моделирование откликов приборов электромагнитного каротажа). За счет применения стадии предварительного моделирования производиться сравнение с каротажем, полученным в вышележащих секциях (выше целевого интервала) во время бурения внутри целевого интервала, и впоследствии выполняется сравнение смоделированных и фактических данные ГИС, собранных внутри интервала.
Заявленный результат достигается за счет способа автоматизированного процесса геологической проводки скважин, включающий этапы, на которых:
получают первичные параметры разрабатываемой скважины, содержащие по меньшей мере каротажные данные и данные инклинометрии;
получают параметры по меньшей мере одной опорной скважины, содержащие по меньшей мере каротажные данные и данные инклинометрии;
осуществляют построение первичной геонавигационной модели на основании данных по меньшей мере одной опорной скважины;
осуществляют настройку упомянутой геонавигационной модели с помощью структурных поверхностей, причем первичная модель содержит набор каротажных кривых и данные инклинометрии;
определяют синтетическую кривую на основании каротажной кривой из первичной геонавигационной модели;
получают данные бурения фактической скважины;
определяют положение ствола скважины на основании сравнения синтетической кривой с каротажной кривой по данным, полученным по данным бурения скважины.
В одном из частных вариантов осуществления опорная скважина выбирается на основании автоматизированного анализа межскважинной корреляции.
В другом частном варианте осуществления опорная скважина выбирается с помощью автоматизированного анализа структурной карты по кровле целевого пласта.
В другом частном варианте осуществления структурная карта строится на основе отбивок пласта в окружающих скважинах с использованием данных сейсмоактивности.
В другом частном варианте реализации способа осуществляют автоматизированный подбор расположения точек изменения угла падения пласта и величины самого угла.
Заявленное решение также реализуется за счет системы автоматизированного процесса геологической проводки скважин, которая содержит по меньшей мере один процессор и по меньшей мере одну память, которая содержит машиночитаемые инструкции, которые при их выполнении процессором реализуют вышеописанный способ.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
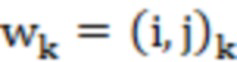
Фиг. 1 иллюстрирует глубины скважины.
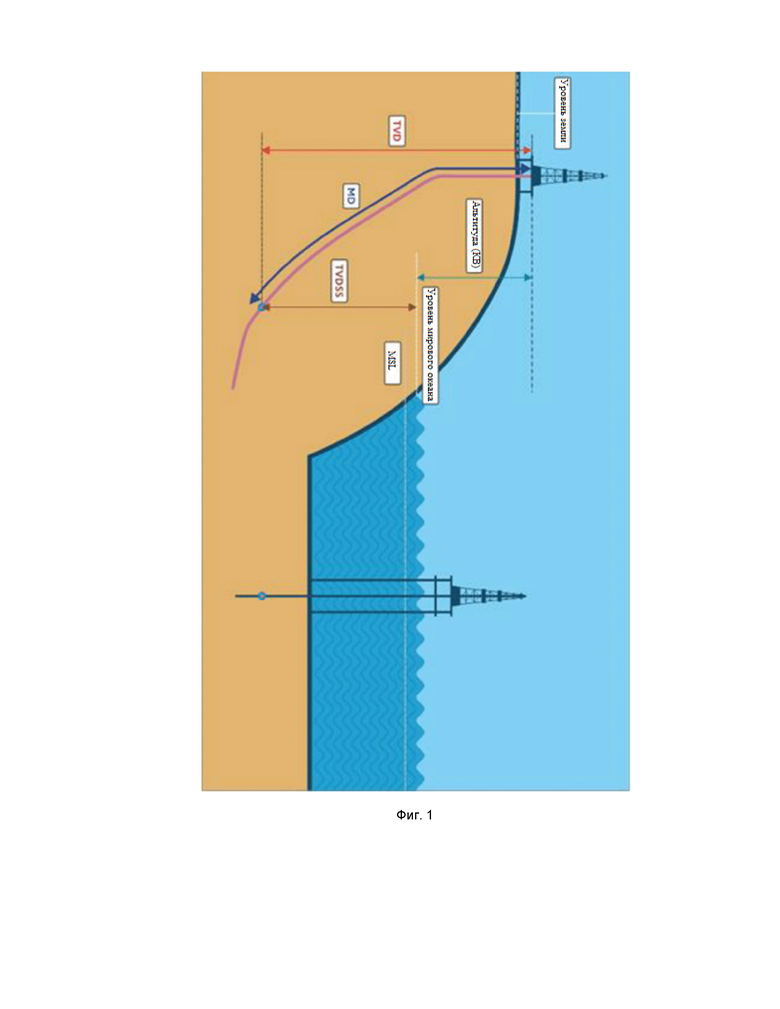
Фиг. 2 иллюстрирует углы падения скважины.
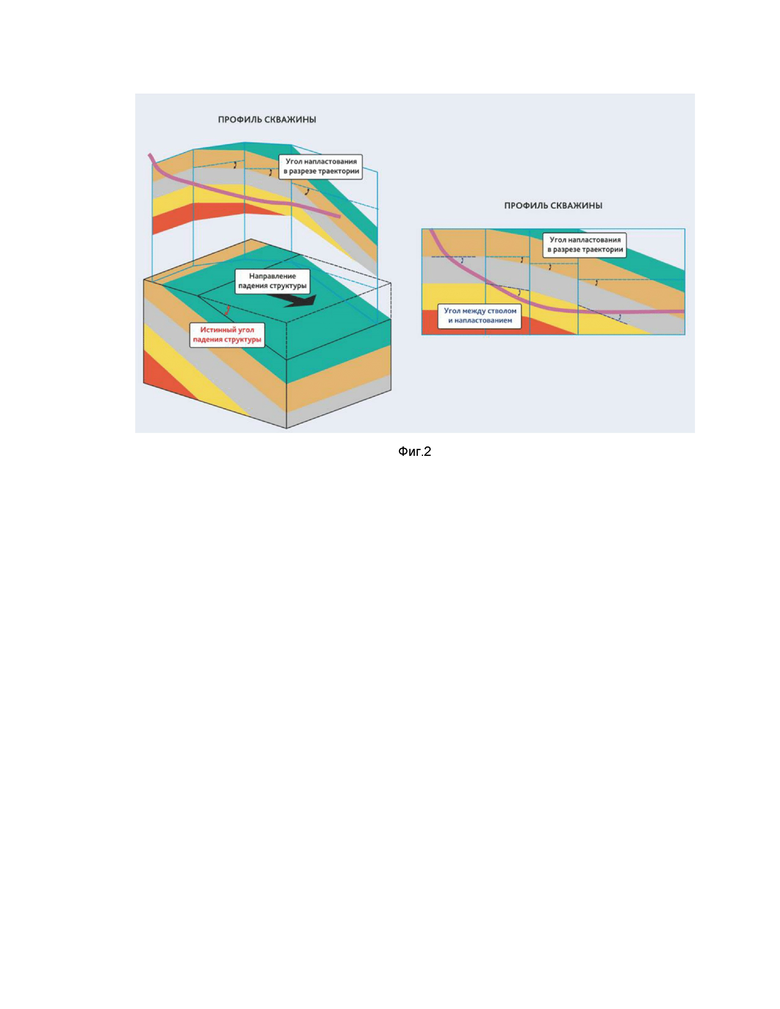
Фиг. 3 компоновка низа буровой колонны.
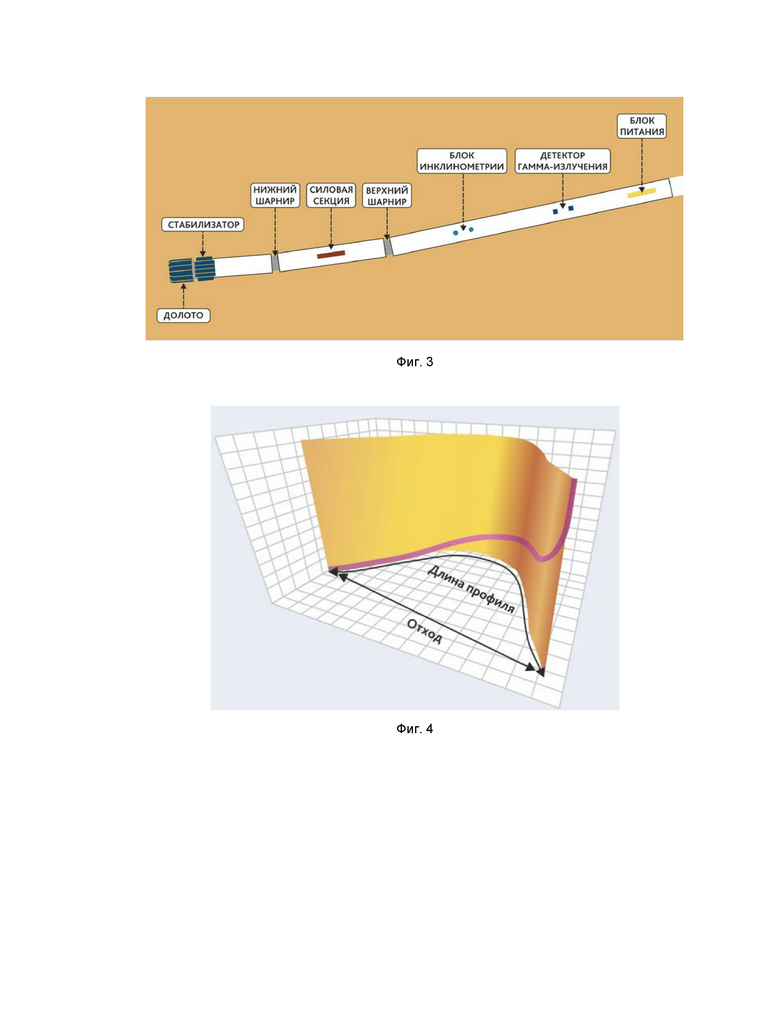
Фиг. 4 иллюстрирует длину профиля и отход скважины.
Фиг. 5 иллюстрирует последовательность этапов заявленного способа.
Фиг. 6 иллюстрирует корреляцию по линии скважин.
Фиг. 7 – Фиг. 8 иллюстрируют примеры первоначальных ГМ.
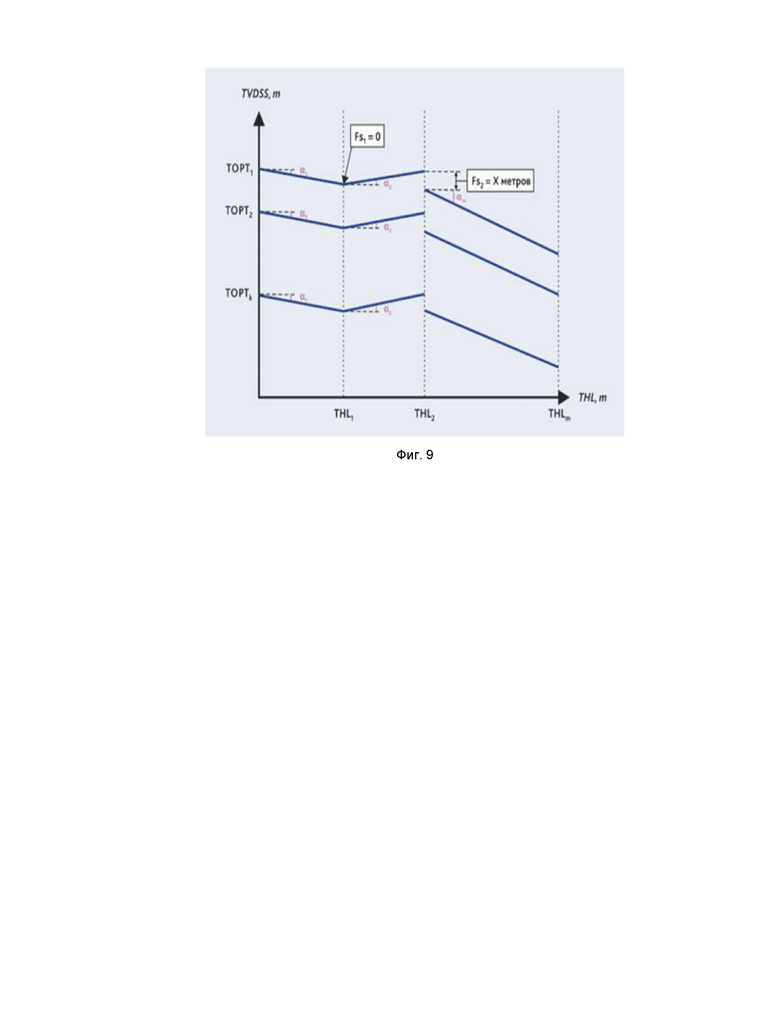
Фиг. 9 иллюстрирует пример ГМ с набором маркеров.
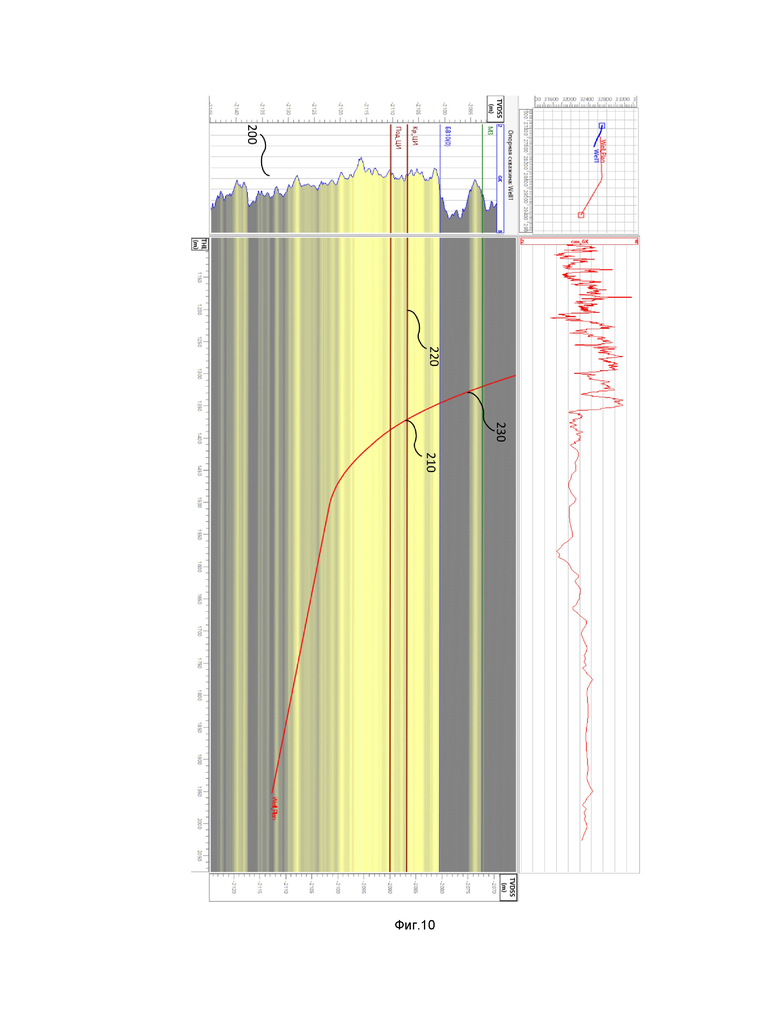
Фиг. 10 иллюстрирует пример построения синтетической кривой.
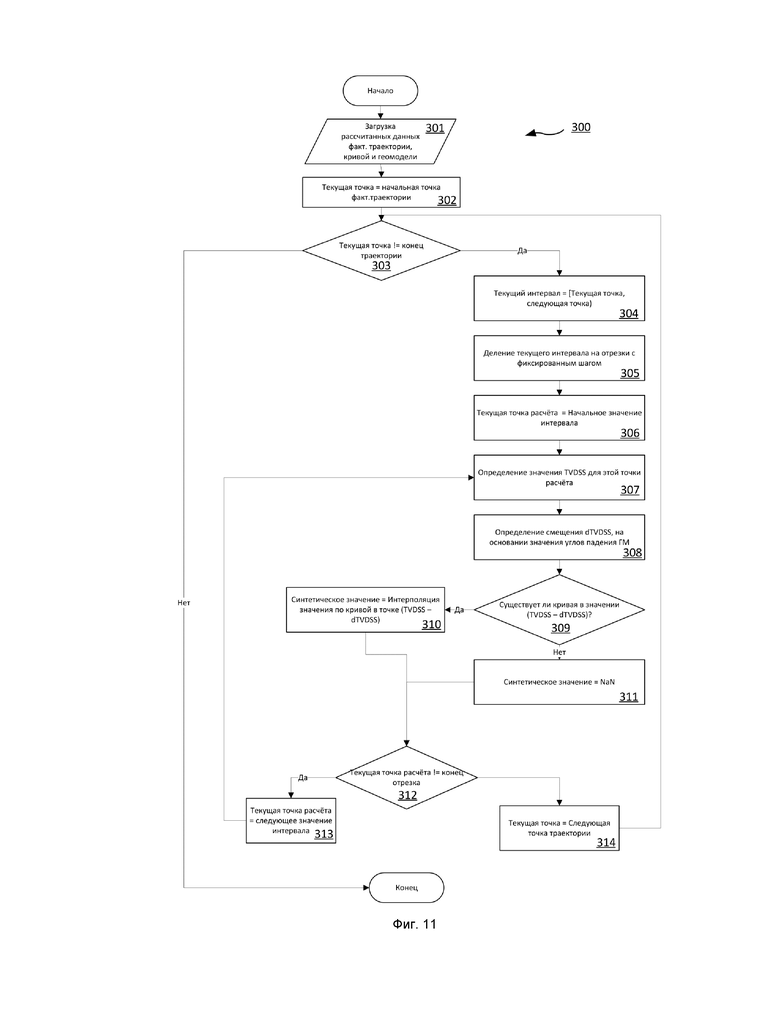
Фиг. 11 иллюстрирует блок-схему этапов построения синтетической кривой.
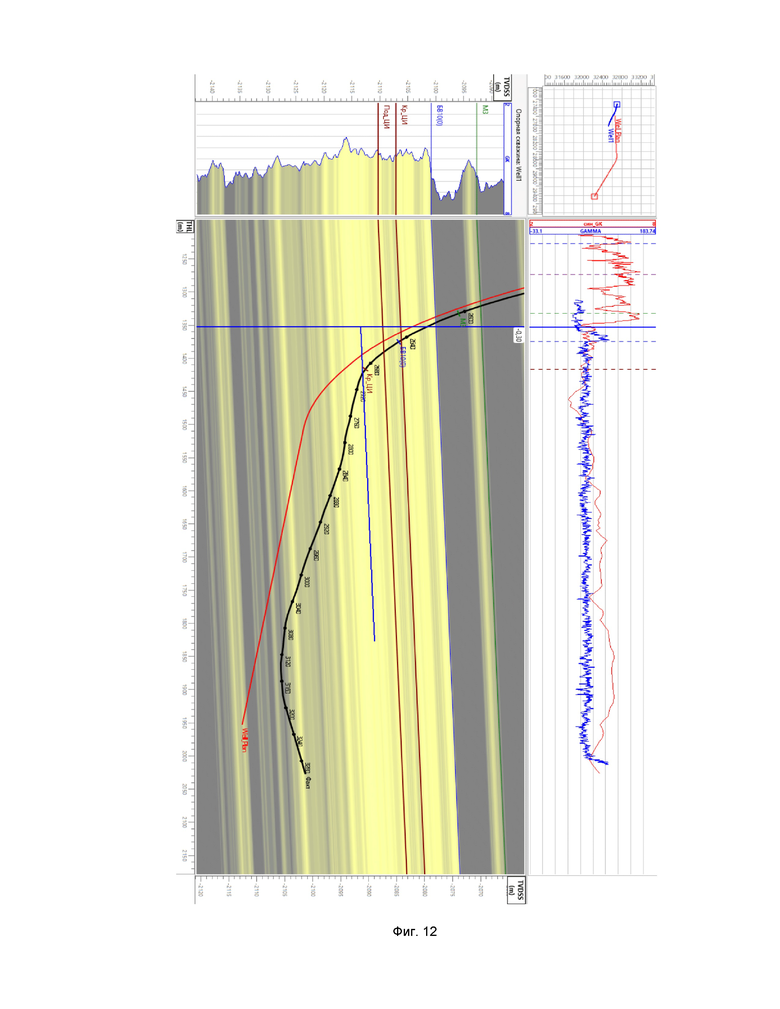
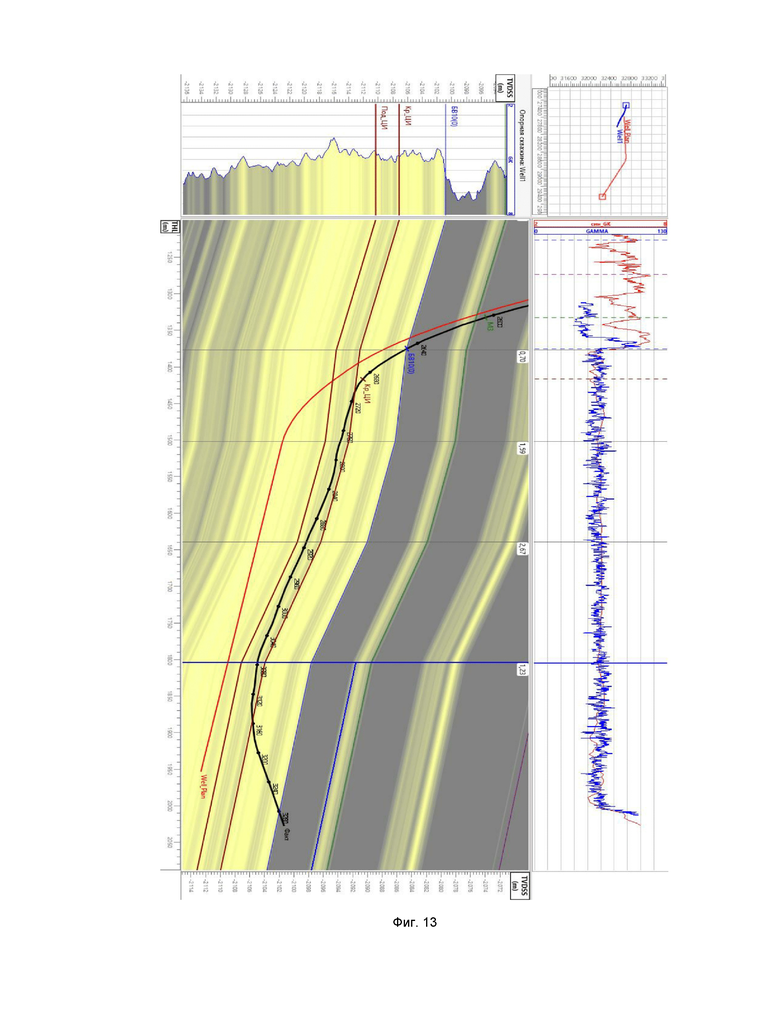
Фиг. 12 – Фиг. 13 иллюстрируют пример сравнения синтетических расчетов и фактических каротажных данных.
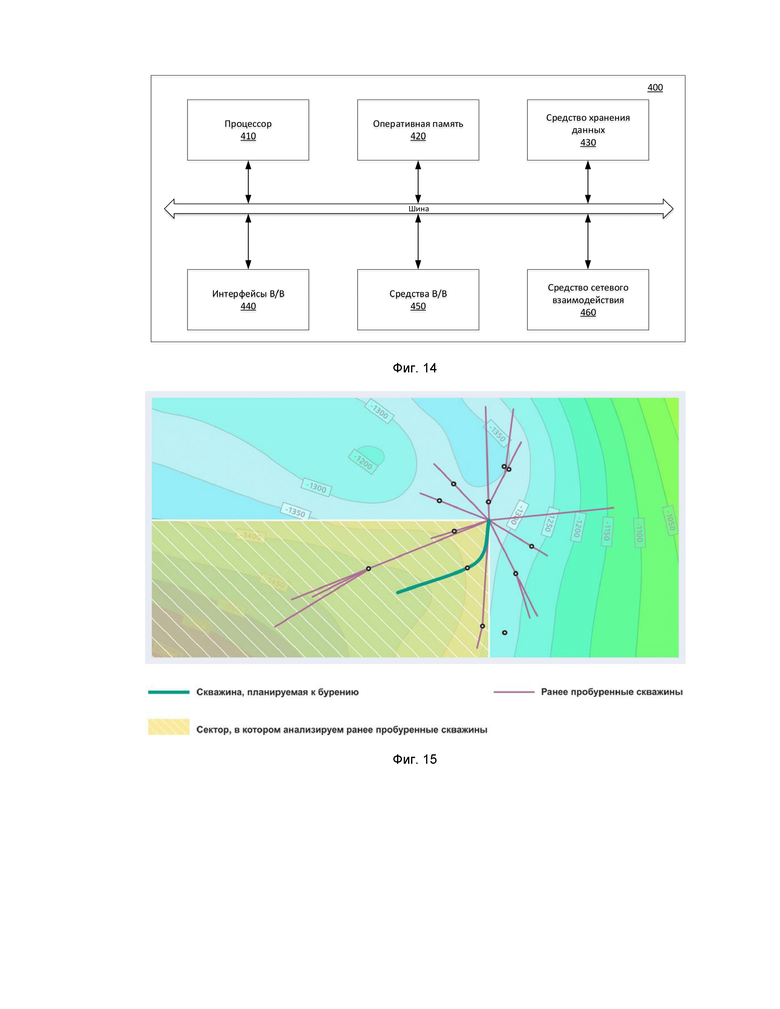
Фиг. 14 иллюстрирует пример системы для реализации заявленного способа.
Фиг. 15 иллюстрирует пример определения скважин для автоматического анализа.
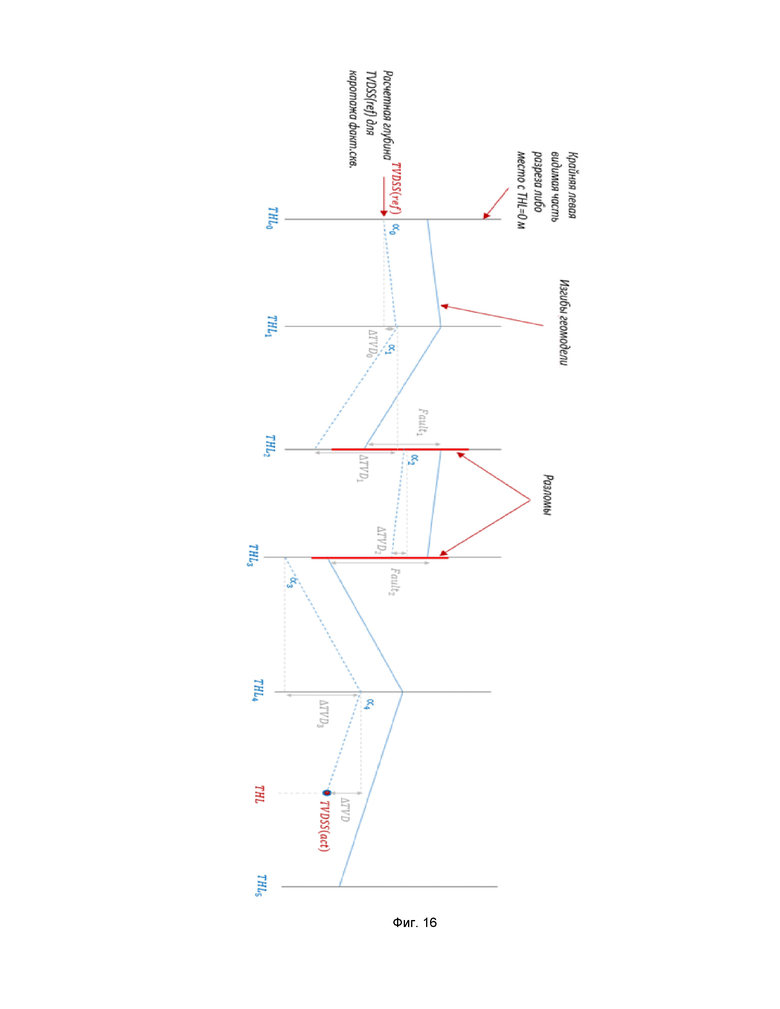
Фиг. 16 иллюстрирует пример двумерной модели пласта с изгибами и разломами.
ТЕРМИНЫ И ОПРЕДЕЛЕНИЯ
Устье скважины – «начало» отсчета глубины скважины (часто – считается от стола ротора).
Координаты устья – пространственное (латеральное) положение устья скважины, считается в определенной системе координат (например, координатами X, Y, либо долгота/широта и т.п.)
Координатная сетка – система координат, предназначенная для определения положения точки.
Альтитуда – высота устья скважины над уровнем мирового океана (абсолютной отметки, равной 0).
Глубина, измеренная по стволу (Measured Depth) – длина кривой траектории скважины на определенную точку замера (Фиг. 1).
Глубина по вертикали (True Vertical Depth - TVD) – вертикальная глубина, глубина по вертикали от уровня стола ротора.
Истинная глубина по вертикали (абсолютная отметка, True Vertical Depth Sub-Sea) – абсолютная глубина, глубина по вертикали от уровня моря.
Конечная глубина – глубина забоя скважины.
Уровень мирового океана (Mean Sea Level) – исходное положение свободной поверхности Мирового океана; стандарт, от которого отсчитывается абсолютная высота поверхности суши и глубины морей.
Уровень земли (ground level) – высота поверхности земли от уровня мирового океана.
Напластование – залегание осадочных горных пород в земной коре в виде пластов, пропластков или слоев.
Поверхность (горизонт) – граница, разделяющая пласты, показывает структурную геометрию пласта.
Угол (истинный) падения пласта (угол падения структуры) – угол между поверхностью пласта и горизонтальной плоскостью, т.е. между линией падения и направлением падения (Фиг. 2).
Кажущийся угол падения пласта (относительный) – угол падения пласта в разрезе траектории скважины.
Угол между стволом и падением структуры пласта – угол между осью скважины и падением пласта в разрезе траектории.
Азимут угла падения пласта – угол между меридианом, на котором находится точка наблюдения, и линией падения пласта
Структурная карта – карта, показывающая поверхность кровли или подошвы выбранного пласта или горизонта.
Вертикальная мощность пласта (True Vertical Thickness) – толщина пласта, замеренная между его кровлей и подошвой по вертикали.
Бурение скважины – процесс сооружения скважины путем разрушения горных пород с помощью бурового оборудования (бурильной колонны).
Компоновка низа буровой колонны (КНБК) – нижняя часть бурильной колонны от долота до бурильных труб. В зависимости от задачи (зарезка бокового ствола скважины, бурение вертикального участка, набор кривизны, проведение исправительных работ) состав КНБК может варьироваться. Как правило, КНБК (Фиг. 3) состоит из долота, забойного двигателя, стабилизаторов; приборов, позволяющих выполнять измерения в процессе бурения; инструментов, позволяющих управлять траекторией скважины.
Измерения во время бурения (Measurement While Drilling - MWD) – измерения во время бурения, связанные с определением текущего зенитного угла и магнитного азимута. Кроме того, могут замеряться уровни вибрации, нагрузка на долото, затрубное давление. Также на приборы MWD возложены функции обмена данными с поверхностью и снабжение энергией приборов LWD.
Каротаж во время бурения (Logging While Drilling - LWD) – измерения во время бурения, связанные с определением геофизических характеристик пласта. Измерения могут производиться по широкому спектру методов: электромагнитный, плотностной, акустический, ядерно-магнитный, сейсмический, нейтронный.
Управление траекторией скважины – возможность проводки траектории скважины в заданном направлении, основываясь на показаниях приборов MWD/LWD.
Проекция на долото – проекция данных инклинометрии на текущий забой скважины, сделанная на базе фактических замеров и основных параметров КНБК.
Телесистема (телеметрия) – прибор, позволяет осуществить замер зенитного и азимутального углов во время бурения, и передачу информации с забоя на поверхность.
Современные телесистемы позволяют проводить множество других замеров (вибрация на долоте, гамма-каротаж, индукционный каротаж, резистивиметрия, затрубное давление), а также часто являются источником питания для других проборов каротажа во время бурения.
Инклинометрия – метод контроля за пространственным положением оси скважины. Измеряют угол ее отклонения от вертикали (зенитный угол) и магнитный азимут проекции оси скважины на горизонтальную плоскость.
Для измерений применяются электрические, фотографические и гироскопические инклинометры. Все остальные параметры, определяющие траекторию скважины в пространстве, рассчитываются из 3-х измеренных параметров – глубины по стволу, зенитного угла, магнитного азимута.
Данные инклинометрии скважины используются для обеспечения бурения скважины в заданном направлении, при определении истинных глубин залегания геологических объектов, при построении карт и разрезов, когда для этих целей привлекаются каротажные и буровые материалы.
Замер инклинометрии – точка, в котором измеряются параметры пространственного положения скважины (зенитный угол и магнитный азимут на определенной глубине по стволу).
Пространственная интенсивность (пространственная кривизна) – величина, характеризующая степень искривления ствола (темп отклонения скважины от ее начального направления). Рассчитывается как отношение приращения угла искривления к расстоянию между точками замеров по оси скважины.
Интенсивность набора зенитного угла – интенсивность искривления ствола скважины в вертикальной проекции.
Интенсивность по азимуту – интенсивность искривления ствола скважины в горизонтальной проекции.
Горизонтальный отход скважины – расстояние от устья скважины до точки замера в горизонтальной проекции.
Отход скважины на Восток/Запад – расстояние от устья скважины до точки замера в горизонтальной проекции в направлении восток-запад.
Отход скважины на Север/Юг – расстояние от устья скважины до точки замера в горизонтальной проекции в направлении сервер-юг.
Общий отход – расстояние от устья скважины до текущего забоя скважины в горизонтальной проекции.
Длина профиля скважины (отход вдоль траектории скважины) – длина кривой траектории скважины от устья скважины до точки замера в горизонтальной плоскости (Фиг. 4).
Вертикальный разрез (вертикальная секция) – расстояние от устья скважины до точки замера в вертикальной плоскости, в котором построена вертикальная проекция. Данное значение может изменяться в зависимости от азимута вертикальной проекции.
Азимут ствола (азимутальный угол) – угол между проекцией оси скважины на горизонтальную плоскость и определенным направлением (например, магнитный или истинный север).
Зенитный угол – угол между осью скважины и вертикалью.
Геонавигация (геологическая проводка скважины) представляет собой преднамеренное изменение положения ствола скважины в пласте, основанное на анализе геологической, геофизической информации и данных инклинометрии, поступающих в процессе бурения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Процесс геонавигации начинается до вскрытия целевого интервала. Вся подготовка к проводке должна быть завершена на этапе бурения транспортного ствола – секции, предшествующей горизонту, имеющей главной задачей обеспечение успешной геонавигации в целевом интервале. Обычно транспортный ствол представлен наклонно-направленной секцией.
После выхода из транспортного ствола следующая важная задача – «посадка» скважины на кровлю целевого интервала (пласта) – часть пласта (или пласт), выбранный для строительства горизонтальной секции или горизонтального бокового ствола, с целью получить максимально продуктивную скважину.
Для точного определения траектории горизонтальной секции или БГС необходимо использовать геологические цели, представляющие собой трехмерные объекты (точки в трехмерном пространстве, либо параллелепипеды), через которые должна пройти траектория для достижения оптимального положения горизонтального ствола скважины внутри целевого интервала.
Следующим этапом является определение точек Ti:
Т1 - точка пересечения ствола скважины и кровли целевого интервала; Т2 – первая точка горизонтальной части траектории, где достигается зенитный угол в 90 градусов. Если траектория является пологой, то Т2 определяется как точка, после которой отсутствуют значительные вариации в интенсивности искривления ствола; Т3 – (TD – Total Depth) - проектная глубина скважины. Т3 представляет собой точку, в которой запланирована остановка бурения.
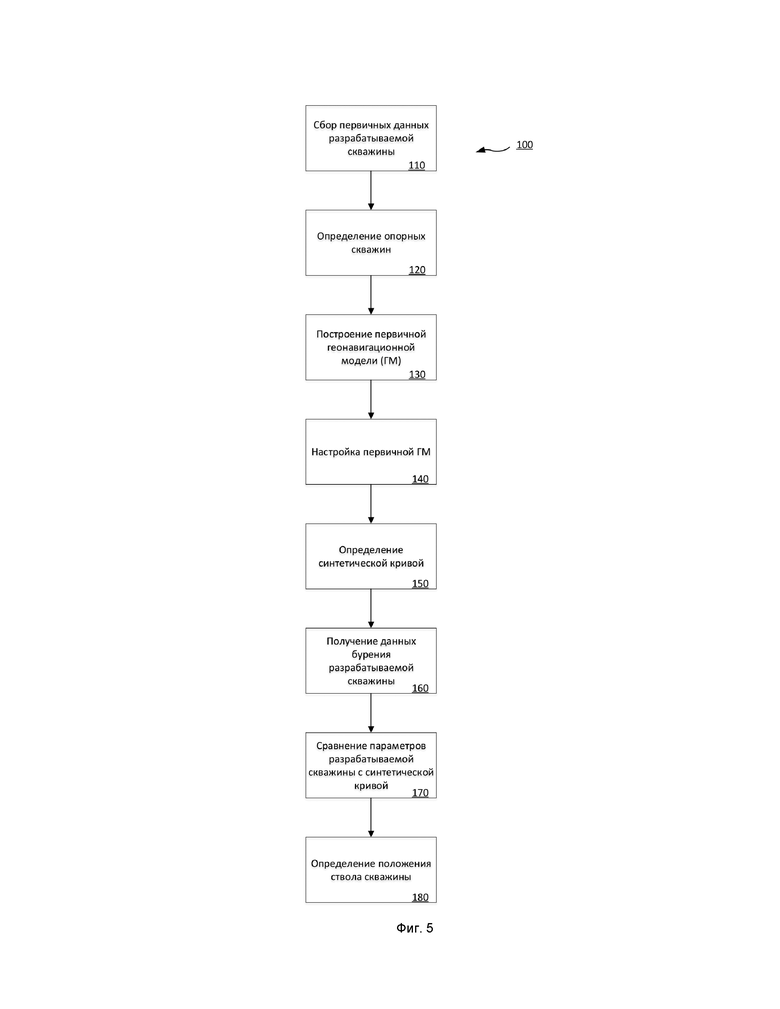
На Фиг. 5 представлен заявленный способ автоматизированного процесса геологической проводки скважин (100).
На первом этапе (110) способа выполняется первичный сбор данных по разрабатываемой скважины, содержащие, как правило, каротажные данные и данные инклинометрии.
Далее определяется одна или более опорных скважин по отношению к разрабатываемой скважине (этап 120).
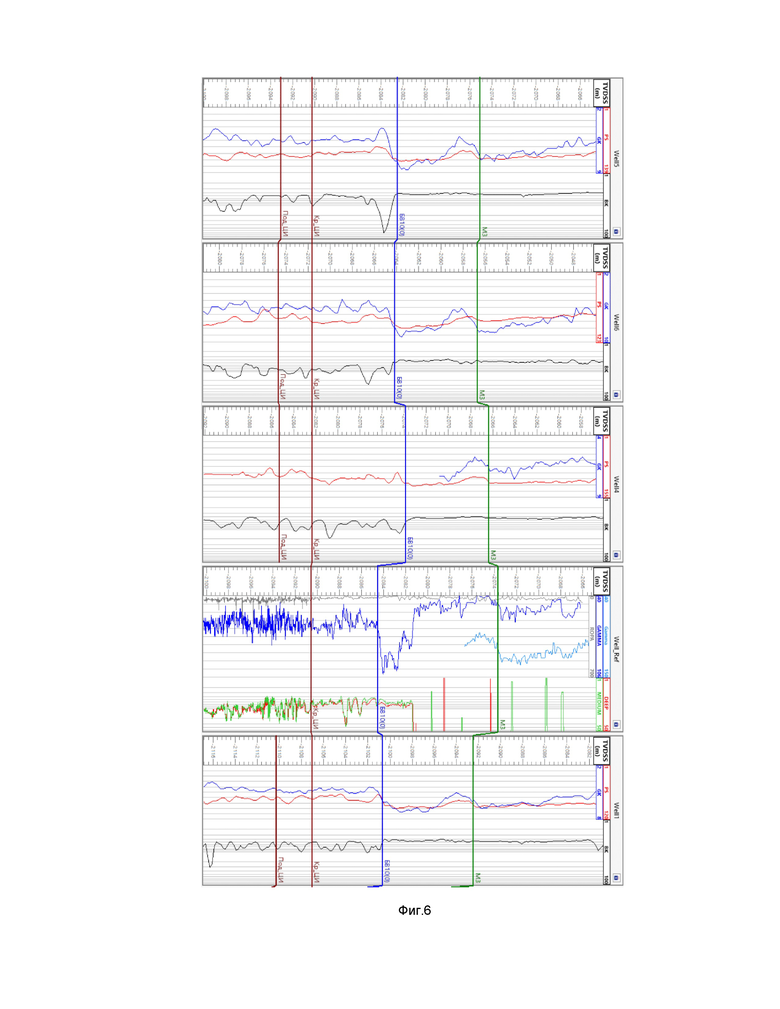
Опорная скважина может быть вертикальной или наклонно-направленной. Она выбирается из пробуренных соседних скважин, а также свойства пласта в которых предполагаются схожими со свойствами в районе бурения. Пилотный ствол для горизонтальной скважины также может служить в качестве опорной скважины. На основании каротажных данных опорной скважины определяются геофизические свойства каждой прослойки пласта и прогноз свойств по всей длине горизонтальной скважины. Для выбора опорной скважины может использоваться межскважинная корреляция и структурная карта по кровле целевого пласта. Корреляционная схема (Фиг. 6) позволяет оценить мощности пластов и их латеральную выдержанность для строящейся скважины, и скважин-кандидатов на роль опорной.
Положение основных геологических маркеров в скважинах, окружающих разрабатываемую, позволяют определить примерное ожидаемое изменение толщин ключевых пропластков в фактической (разрабатываемой) скважине. Для более точного расчета проводится анализ по карте кровле целевого пласта. Структурная поверхность кровли пласта строится на основе отбивок пласта в окружающих скважинах с использованием тренда сейсмики (сейсмоактивности). Таким образом, осуществляется автоматизированная интерпретация сейсмических данных с интерпретацией каротажных данных. Из структурной карты получается информация о падении либо росте пласта в направлении запланированного бурения, а также интенсивности изменения угла наклона пласта.
Входными данными по каждой опорной скважине являются:
1) Траектория (Trajectoryoff-set)
2) Данные ГИС (LWDoff-set)
3) Данные по устью скважины (координаты, альтитуда: Xoff-set, Yoff-set, Altitudeoff-set)
4) Данные по геологическим маркерам (TOPSoff-set)
5) Финальная геонавигационная модель (GEOMODELoff-set).
Здесь под финальными геонавигационными моделями понимаются модели, полученные от ранее пробуренных скважин, для которых был произведен расчет относительно синтетических каротажей.
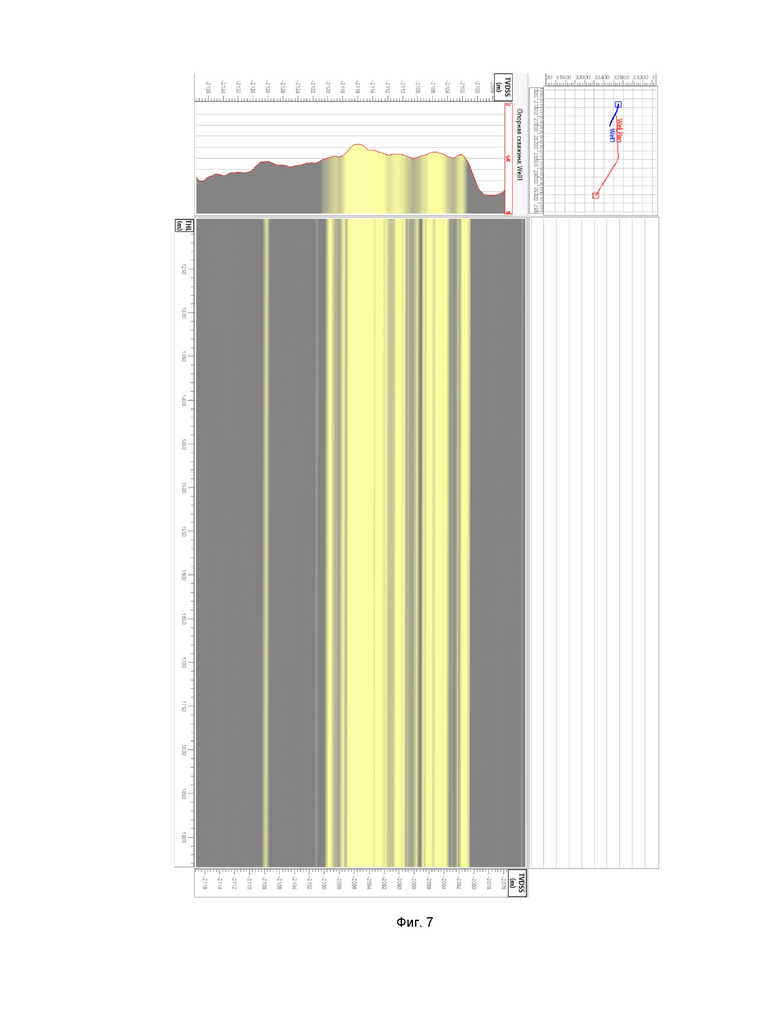
На этапе (130) выполняется построение первичной геонавигационной модели (ГМ). На данном этапе осуществляется вычислительная обработка по распространение физических свойств пласта (естественная радиоактивность, пористость, сопротивление) на определенное расстояние в том направлении, в котором запланировано бурение фактической скважины. Осуществляется обработка фактических данных каротажа ГК (гамма-каротаж) и рассмотрим модель на одном или более интервалов по TVD.
Каждому интервалу значений каротажа ГК может присваиваться цветовая кодировка, представленная в Таблице1.
Таблица 1
Первичная геонавигационная модель может изменяться, что связано с изменением обработки поступающих каротажных данных, поскольку добавляются дополнительные (промежуточные) значения каротажной кривой. Важно определить какие пропластки оставлять в случае, если каротажная кривая содержит несколько тысяч точек, а возможность визуализации на экране устройства имеет ограничение, в зависимости от разрешающей способности дисплея.
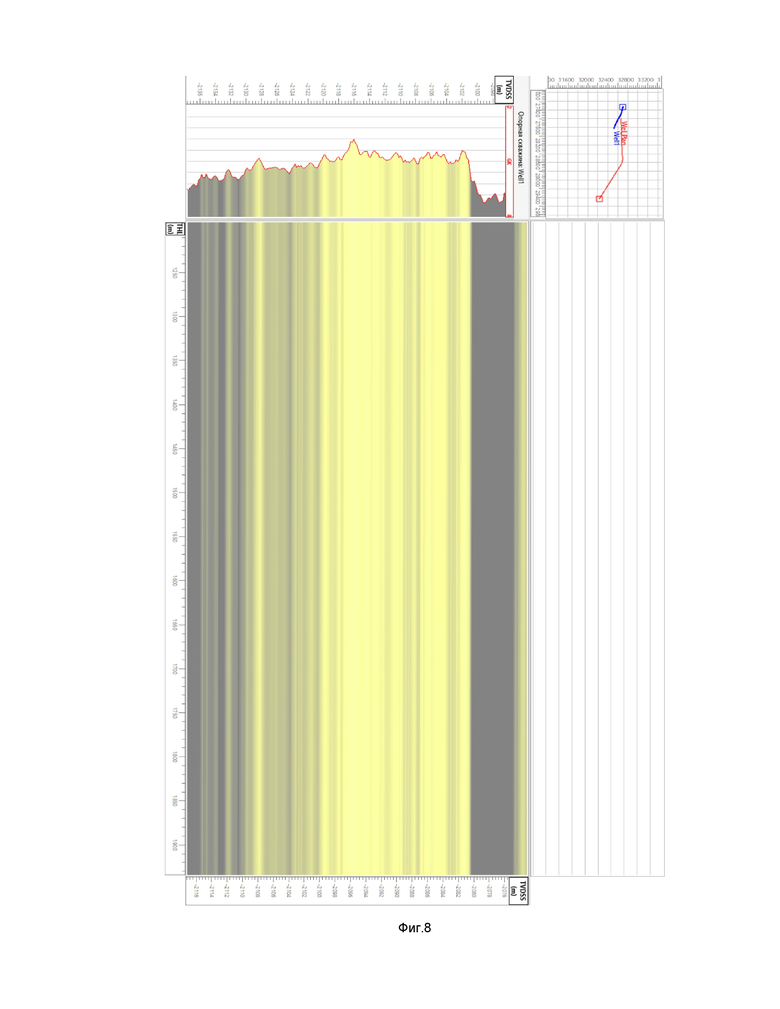
Для этого осуществляется следующее. Устанавливается определенный шаг по TVD и с этим шагом берется определённая точка каротажа ГК, идентифицируется с помощью цветового идентификатора и отрисовывается следующая линия геонавигационной модели. Данный процесс итеративно повторяется для всего заданного интервала по TVD. Пример полученной ГМ представлен на Фиг. 8.
Следующим этапом является настройка первоначальной ГМ (140). Для первоначальной настройки ГМ может применяться набор структурных поверхностей, построенных на основании сейсмики, либо каротажных данных, собранных в ранее пробуренных скважинах.
Вначале определяются ключевые геологические маркеры и выполняется автоматическое построение проекции структурной поверхности на плоскость, проходящую вдоль траектории (планируемой) фактической скважины. Следующим шагом является настройка маркеров геонавигационной модели на проекцию выбранной поверхности. В данном процессе может использовать несколько различных методов распределения свойств пластов, заключенных между ключевыми геологическими маркерами, например, параллельное распределение свойств, распределение с эрозией от подошвы, распределение с эрозией от кровли пласта и т.п.
Получаемая ГМ может быть представлена в виде таблицы следующего вида:
, где
THLi – положение i-й точки, в которой происходит изменение угла падения пласта, на шкале отхода по горизонтали [м]
αi – угол падения структуры пласта на интервале от THLi до THLi+1 [градусы]
FSi – смещение пластов по вертикали из-за разлома, начиная с точки THLi [м]
На Фиг. 9 представлен пример ГМ с набором геологических маркеров TOPSoff-set = (TOPO1, TOPO2, …, TOPOK).
После построения первоначальной ГМ, далее осуществляется расчет синтетической кривой (150). Для этого определяется кривая, для которой выполняется синтетический расчет, т.е. моделирование показаний приборов с данной каротажной кривой.
На Фиг. 10 представлен пример построения синтетической кривой. Определенная каротажная кривая строится относительно шкалы TVD. Теперь каждой точке кривой GK необходимо поставить точку кривой GK_Syn (синтетическая кривая GK) относительно шкалы THL. Искусственно созданному пику в 15 Gapi на кривой GK (200) соответствует пик на синтетической кривой в той точке по THL (210) (горизонтальный), в которой пропласток (220) был пересечен плановой траекторией фактической скважины (230). Положение пика (210) на синтетической кривой зависит от углов падения пласта, поскольку, изменяя набор углов, изменяется точка пересечения пропластка (220) фактической траекторией (230). Аналогичный процесс расчета производится по всем парам точек (GK, TVD) с получением пар точек (GK_Syn, THL). Если алгоритмически выполняется перерасчет углов падения пласта (например, в результате настройки модели на структурную поверхность), то меняется и синтетическая кривая, так как изменяются точки пересечения траектории и пластов. Для интервала по THL, в котором траектория идет параллельно пластам, синтетическая кривая становится пологой.
На основных этапах расчета синтетической кривой, выполняется следующее:
1) Определение значения траектории из начальных значений (MD, INCL, AZIM) рассчитываются, используя метод минимальной кривизны. Выполнив расчёт, определяются такие значения, как отход по горизонтали (THL), абсолютную глубину над уровнем моря (TVDSS).
2) Интерполяция кривой по значениям траектории (т.к. значения кривой поступают, как правило, чаще, чем значения траектории, то для расчёта промежуточных значений, нужно использовать интерполяцию). Наиболее скоростной и точной интерполяцией является линейная.
3) Выполняется расчёт значений фактической траектории, который аналогичен расчёту данных опорной траектории, указанному в пункте 1).
4) Синтетический расчёт.
Далее на Фиг. 11 более подробно рассмотрим расчет синтетики (300). Вначале задаются рассчитанные значения траектории фактической скважины (301). Далее указывается начальная точка расчета, в частности, это точка начала траектории (302). Для расчёта выбирается текущая точка, а также последующая (304). Далее выполняется деление указанного интервала с заданным фиксированным шагом (305). В качестве текущей точки выбирается первое значения поделённого отрезка (306). Для данного отрезка определяется величина TVDSS в данной точке, используя линейную интерполяцию по линейной траектории (307). Далее определяется, на сколько произошло смещение относительно начала координат по TVDSS из-за величин углов падения (308).
На этапе (309) определяется существует ли кривая в этом значении TVDSS. Если да, то определяется её значение, используя интерполятор (310), в противном случае значения, соответствующего такой кривой не существует (311). Далее определяется, зафиксировано ли достижение конца поделённого отрезка (312). Если да, то в качестве текущего значения устанавливается следующее значение определенного интервала (313) и переход к этапу (303).
Если зафиксировано достижение конца значений траекторий (314), то осуществляется возвращение синтетической кривой, иначе в качестве текущей точки выбирается следующая точка и переход к этапу (303).
Таким образом, синтетическая кривая представляет собой каротажную кривую опорной скважины, пересчитанную из TVD в THL, с учетом плановой траектории фактической скважины (230) и углов падения пласта ГМ. Следующим шагом является переход к этапу бурения и сопоставления фактического каротажа с синтетическим.
После начала бурения и получения первых фактических данных ГИС (160) геонавигация производится за счет изменения геометрии пласта. Чаще всего это происходит за счет редактирования угла падения пласта. При этом угол меняется для определенного интервал по THL, и эти изменения не затрагивают часть синтетических расчетов.
Входными данными по фактической скважине являются:
1) Планируемая траектория (Trajectoryact)
2) Данные ГИС (LWDact) (Секции, выше ЦИ – целевого интервала)
3) Данные по устью скважины (координаты, альтитуда: Xact, Yact, Altitudeact)
4) Данные по геологическим маркерам (TOPSact).
В ходе бурения и целей геонавигации применяется ранее построенная синтетическая ГМ для сравнения и вычисления положения ствола разрабатываемой скважины (170). Полученные данные каротажа в ходе бурения поступаю в вычислительное устройство, содержащее синтетическую ГМ, например, была пробурена очередная трубка и полученная информация характеризует 10 метров каротажной кривой GK. Необходимо настроить синтетическую ГМ на поступивший каротаж. Пример полученной информации и ее отображения представлен на Фиг. 12.
Для изменения формы синтетической модели необходимо изменить угол падения пласта. В примере, приведенном на Фиг. 10, угол вблизи 900 метров по THL равен 0.1 градуса, что выглядит явно недостаточным. Даже если такой угол был получен в ходе настройки ГМ на структурную поверхность, необходимо учитывать, что погрешность построения структурных карт может достигать десятков метров по вертикали и, соответственно, данные каротажа строящейся скважины должны иметь приоритет в плане использования в качестве точки отсчета. Программная логика обрабатывает полученные данные и синтетические расчеты для более точного сопоставления каротажной информации.
На Фиг. 13 представлен пример дополнительной обработки данных, в ходе которой угол падения пласта был увеличен до 0.3 градуса, что соответствует углу падения в 0.6 градуса на отметке в 937 м по THL. Далее осуществляется анализ степени совпадения пересчитанной синтетической кривой и фактического каротажа.
При автоматизированной подстройке угла падения пласта, программная логика анализирует степень расхождения фактического и синтетического каротажей. В представленном на Фиг. 11 примере расхождение находится в интервале 937 – 1007 метров по THL. При дальнейшей обработке осуществляется изменение угла с 0.6 до 0.9 градусов. При выполненной обработке определяется совпадение каротажей, то есть для данного отрезка THL определилось положение ствола скважины в пласте.
Далее выполняется обработка интервала, в котором оказался ствол скважины в данный момент (180). Для этого, в частности, можно применяться цветовую кодировку, указанную в Таблице 1, в соответствии с которой серый цвет означал глину, а желтый – песчаник. В интервале 937 – 1007 метров по THL ГК растет, таким образом, ствол скважины приближается к глинизированным пропласткам, что требует корректировки действий буровой команды так, чтобы не выйти за пределы целевого интервала. При поступлении новых каротажных данных, динамически продолжается настройку синтетической кривой на фактическую, за счет изменений угла падения. После достижения совпадения между синтетическим и фактическим каротажами на новом интервале по THL формируются рекомендации по бурению для следующего интервала (например, 1) Продолжить бурение с набором зенитного угла до 92 градусов; 2) Продолжить бурение с зенитным углом 88.5 градусов до дальнейших рекомендаций согласно принятому решению по расположению ствола для вскрытия нижней части целевого интервала и т.п.). Подобный цикл повторяется до достижения точки проектного забоя.
На Фиг. 14 представлен общий вид вычислительной системы (400) для выполнения заявленного способа геонавигации (100). В общем случае под системой (400) понимается также вычислительное устройство, например, персональный компьютер, ноутбук, сервер, мейнфрейм, смартфон, планшет и т.п.
Система (400) содержит один или более процессоров (410), осуществляющих заданную обработку данных. Оперативную память (420), содержащую исполняемые команды. Средство постоянного хранения информации (430), представляющее собой, например, жесткий диск (HDD), твердотельный накопитель (SSD), носитель на флэш-памяти, оптические диски (CD, DVD, Blue-Ray) и т.п.
Система (400) содержит также набор интерфейсов (440) для подключения различных устройств, например, USB, USB-C, Micro-USB, PS/2, COM, LPT, FireWire, Lightning, Jack-audio и т.п. В качестве средств В/В (450) может использоваться: клавиатура, динамики, дисплей, сенсорный дисплей, трекбол, манипулятор мышь, световое перо, стилус, тачпад, проектор, джойстик, интерфейс преобразования голосовых команд, нейро-гарнитуры и т.п.
Средство сетевого взаимодействия (450) обеспечивает прием и передачу информации по сетевым протоколам. В качестве таких средств может использоваться Ethernet карта, Wi-Fi модуль, NFC модуль, IrDa, Bluetooth, BLE, модуль спутниковой связи и т.п. С помощью средств (450) реализуется обеспечения обмена данными посредством сети Интернет, Интранет, ЛВС и т.п.
Система (400) может получать информацию для планирования геонавигации из множества внешних источников и может представлять собой облачный сервер для расчетов каротажной информации на основе синтетических расчетов. Данные в систему (400) могут передаваться с помощью WITSML (Wellsite Information Transfer Standard Markup Language) протокола, либо через почтовый сервер. На данный момент самым распространенным форматом передачи данных с буровой в нефтегазовой сфере является WITSML – это стандарт, разработанный компанией Energistics. В настоящее время в сферу интересов Energistics входят практически все области нефтегазовых знаний – от петрофизики и геофизики до управления добывающим активом, от разведки до бурения. WITSML – стандартный язык разметки для передачи скважинных данных. Основной целью создания языка являлась попытка получить бесперебойный поток информации между оператором и сервисными компаниями, в целях уменьшения времени на принятие решений при строительстве скважин. Наличие интернета позволяет наладить удаленное сопровождение бурения скважин вне зависимости от расстояния между буровой и геологом.
Система (400) может работать совместно с нейросетью, например, рекуррентного типа. Главной целью использования машинного обучения является формирование матрицы ARRAYminmax вида:
МАРКЕРА
ЧИСЛО ДИПОВ
Для этого используются ГМ модели ранее пробуренных скважин, как обучающая информация для нейросети. Информация по финальным ГМ ранее пробуренных скважин загружаются в систему (400), также, загружаются смоделированные 3D поверхности. Задается сектор интересов, включающий в себя определенное количество опорных скважин (см. Фиг. 15). Сектор задается в градусах, середина сектора проходит через финальную точку траектории скважины, планируемой к бурению, по умолчанию сектор можно задать в 90 градусов.
Далее производится перебор всех скважин, попавших в сектор анализа и заполнение матрицы
ЧИСЛО ДИПОВ
Заполненная матрица ARRAYminmax используется далее в работе нейросети.
Вышеуказанный подход позволяет максимально быстро найти такие наборы (THLi), и (αi), при которых LWDact - LWDmodel{(THLi), (αi), (FSi)} минимально, и при этом (THLi), и (αi) укладываются в ограничения, налагаемые ARRAYminmax, что позволяет определить где траектория находится относительно целевого интервала.
Дополнительно можно применять для обработки каротажных данных фильтрацию, например, Гауссовское сглаживание.
В качестве ускорения процесса расчёта DTW можно использовать расчёт окна (так называемое окно Sakoe-Chiba). Данный принцип применяется для расчета ошибки относительно значения DTW, полученного без использования окна, и величины DTW, полученного с использованием окна определённого размера. Таким образом, используя нейронную сеть можно добиться автоматизированного применения оптимального значения окна для определённого набора кривых.
Рассмотрим в качестве примера расчет синтетического каротажа для двумерной модели геонавигации, представленной на Фиг. 16.
Обозначения:
TVDSS_ref – абсолютная отметка для опорной скважины
TVDSS_act - абсолютная отметка для фактической скважины
THL – горизонтальный отход вдоль траектории фактической скважины
THL(n) – положение изгиба пласта вдоль горизонтального отхода скважины
α(n) – величина угла наклона изгиба пласта n для THL(n)
ΔTVD(n) – разница вертикальной глубины для изгиба n
Fault – разлом пласта (вертикальное смещение вверх либо вниз)
SynthCurve – расчетный синтетический каротаж
Curve – каротаж опорной скважины
MD – измеренный глубины по стволу
KB – альтитуда стола ротора
I – зенитный угол ствола
А – азимут ствола
Исходными данными для расчета синтетического каротажа являются: Траектория опорной скважины, каротаж опорной скважины, траектория фактической скважины, информация об изгибах и разломах двумерной модели пласта. Для двумерной модели пласта являются известными величины THL(n) и α(n), а также разломы Fault(k). Для расчета синтетического каротажа необходимо составить матрицу SynthCurve(i)-THL(i).
Для перехода из глубин TVDSS_act фактической скважины в глубины TVDSS_ref опорной скважины с учетом изгибов и разломов двумерной модели пласта используется формула:

Используя траекторию опорной скважины, определяется значение синтетической кривой:


В итоге вычисляется синтетический каротаж:

Далее выполняется расчет сходимости синтетического каротажа с каротажем фактической скважины.
Расчет основан на алгоритме нелинейного выравнивания сопоставляемых кривых с поиском наилучшего соответствия - Dynamic Time Warping (DTW). Суть его заключается в следующем. Задается квадрат расстояния между i-й точкой первой кривой и j-й точкой второй кривой как D(i,j). Для нахождения точек первой кривой, наилучшим образом соответствующих точкам второй кривой, строится матрица C размера (M×N) по формулам 1-4:
C(1,1) = D(1,1) (1)
C(i,1) = D(i,1) + C(i-1,1) (2)
C(1, j) = D(1, j) + C(1, j-1) (3)
C(i, j) = D(i, j) + min[C(i-1, j),C(i-1, j-1),C(i, j-1)] (4)
где i = 2... M;
j = 2... N;
M – количество точек первой кривой каротажа;
N – количество точек второй кривой.
Данная матрица называется матрицей накопленных сумм или матрицей накопленных штрафов. Если двигаться по ней в обратном направлении, начиная с элемента C(M,N), выбирая минимальные значения элементов матрицы, то получится оптимальный путь, т.е. точки наилучшего соответствия двух кривых.
После заполнения матрицы трансформации, выполняется переход к заключительному этапу, который заключается в том, чтобы построить некоторый оптимальный путь трансформации (деформации) и DTW расстояние (стоимость пути).
Путь трансформации W — это набор смежных элементов матрицы, который устанавливает соответствие между Q и C. Он представляет собой путь, который минимизирует общее расстояние между Q и C. k-ый элемент пути W определяется как
 ,
, 
Таким образом:
 ,
, 
где K — длина пути.
DTW расстояние (стоимость пути) между двумя последовательностями рассчитывается на основе оптимального пути трансформации с помощью формулы:
 .
.
В заключение следует отметить, что приведенные в описании сведения являются примерами, которые не ограничивают объем настоящего технического решения, определенного формулой. Специалисту в данной области становится понятным, что могут существовать и другие варианты осуществления настоящего технического решения, согласующиеся с сущностью и объемом настоящего технического решения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА КОМБИНИРОВАННОГО СОПРОВОЖДЕНИЯ ПРОЦЕССА БУРЕНИЯ СКВАЖИНЫ | 2018 |
|
RU2687668C1 |
| СПОСОБ ОБЪЕДИНЕНИЯ МОДЕЛИ ГЕОЛОГИЧЕСКОЙ ПРОВОДКИ СКВАЖИНЫ С ОПЕРАТИВНОЙ ПЕТРОФИЗИЧЕСКОЙ ИНТЕРПРЕТАЦИЕЙ ДАННЫХ ГИС В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ И СИСТЕМА, РЕАЛИЗУЮЩАЯ СПОСОБ | 2020 |
|
RU2745152C1 |
| СТРАТИГРАФИЧЕСКАЯ И СТРУКТУРНАЯ ИНТЕРПРЕТАЦИЯ НАКЛОННЫХ И ГОРИЗОНТАЛЬНЫХ СТВОЛОВ СКВАЖИН | 2014 |
|
RU2652172C2 |
| Способ проводки горизонтального ствола скважины в целевом интервале осадочных пород на основании элементного анализа шлама | 2019 |
|
RU2728000C1 |
| СПОСОБ РОТОРНОГО БУРЕНИЯ СКВАЖИН МОДУЛЬНОЙ УПРАВЛЯЕМОЙ СИСТЕМОЙ МАЛОГО ДИАМЕТРА | 2018 |
|
RU2687998C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕРТИКАЛЬНОГО И ГОРИЗОНТАЛЬНОГО УДЕЛЬНОГО СОПРОТИВЛЕНИЯ, А ТАКЖЕ УГЛОВ ОТНОСИТЕЛЬНОГО НАКЛОНА В АНИЗОТРОПНЫХ ГОРНЫХ ПОРОДАХ | 2003 |
|
RU2368922C2 |
| УСОВЕРШЕНСТВОВАННЫЕ УСТРОЙСТВО, СПОСОБ И СИСТЕМА ДЛЯ ИЗМЕРЕНИЯ УДЕЛЬНОГО СОПРОТИВЛЕНИЯ | 2012 |
|
RU2589766C2 |
| Способ бурения горизонтальной скважины | 2023 |
|
RU2803985C1 |
| Способ бурения горизонтальной скважины | 2023 |
|
RU2806206C1 |
| СПОСОБ ГЕОНАВИГАЦИИ ГОРИЗОНТАЛЬНЫХ СКВАЖИН | 2001 |
|
RU2230343C2 |
Изобретение относится к бурению направленных скважин. Техническим результатом является повышение точности определения положения ствола скважины в процессе бурения. В частности, предложен способ вычислительного моделирования автоматизированного процесса геологической проводки скважин, включающий этапы, на которых: получают первичные параметры разрабатываемой скважины, содержащие по меньшей мере каротажные данные и данные инклинометрии; выбирают, по крайней мере, одну опорную скважину на основании автоматизированного анализа межскважинной корреляции; получают параметры по меньшей мере одной выбранной опорной скважины, содержащие по меньшей мере каротажные данные и данные инклинометрии; осуществляют построение первичной геонавигационной модели на основании данных по меньшей мере одной опорной скважины; осуществляют настройку упомянутой геонавигационной модели с помощью структурных поверхностей, причем первичная модель содержит набор каротажных кривых и данные инклинометрии; определяют синтетическую кривую на основании каротажной кривой из первичной геонавигационной модели; получают данные бурения фактической скважины; определяют положение ствола скважины на основании сравнения синтетической кривой с каротажной кривой по данным, полученным по данным бурения скважины; формируют рекомендации по бурению для интервалов бурения, касающиеся необходимости изменения зенитного угла. Предложена также система для реализации указанного способа. 2 н. и 3 з.п. ф-лы, 16 ил., 4 табл.
1. Способ вычислительного моделирования автоматизированного процесса геологической проводки скважин, включающий этапы, на которых:
− получают первичные параметры разрабатываемой скважины, содержащие по меньшей мере каротажные данные и данные инклинометрии;
− выбирают, по крайней мере, одну опорную скважину на основании автоматизированного анализа межскважинной корреляции;
− получают параметры по меньшей мере одной выбранной опорной скважины, содержащие по меньшей мере каротажные данные и данные инклинометрии;
− осуществляют построение первичной геонавигационной модели на основании данных по меньшей мере одной опорной скважины;
− осуществляют настройку упомянутой геонавигационной модели с помощью структурных поверхностей, причем первичная модель содержит набор каротажных кривых и данные инклинометрии;
− определяют синтетическую кривую на основании каротажной кривой из первичной геонавигационной модели;
− получают данные бурения фактической скважины;
− определяют положение ствола скважины на основании сравнения синтетической кривой с каротажной кривой по данным, полученным по данным бурения скважины;
− формируют рекомендации по бурению для интервалов бурения, касающиеся необходимости изменения зенитного угла.
2. Способ по п. 1, характеризующийся тем, что опорная скважина выбирается с помощью автоматизированного анализа структурной карты по кровле целевого пласта.
3. Способ по п. 2, характеризующийся тем, что структурная карта строится на основе отбивок пласта в окружающих скважинах с использованием данных сейсмоактивности.
4. Способ по п. 1, характеризующийся тем, что осуществляют автоматизированный подбор расположения точек изменения угла падения пласта и величины самого угла.
5. Система вычислительного моделирования для автоматизированного процесса геологической проводки скважин, содержащая по меньшей мере один процессор и по меньшей мере одну память, которая содержит машиночитаемые инструкции, которые при их выполнении процессором реализуют способ по любому из пп. 1-4.
| WO 2014160741 A1, 02.10.2014 | |||
| US 2005279532 A1, 22.12.2005 | |||
| WO 2014051612 A1, 03.04.2014 | |||
| US 2014360781 A1, 11.12.2014 | |||
| СИСТЕМА, СПОСОБ И МАШИНОЧИТАЕМЫЙ НОСИТЕЛЬ С КОМПЬЮТЕРНОЙ ПРОГРАММОЙ ДЛЯ ПРОГНОЗИРОВАНИЯ ГЕОМЕТРИИ СКВАЖИНЫ | 2011 |
|
RU2560462C2 |
| УПРАВЛЕНИЕ ОПЕРАЦИЯМИ БУРЕНИЯ СТВОЛА СКВАЖИНЫ | 2013 |
|
RU2641054C2 |
| WO 2005091888 A2, 06.10.2005. | |||

