Настоящее изобретение относится к устройству подъема и перемещения для окна и, более конкретно, к устройству подъема и перемещения для окна, которое включает в себя бегунок для подъема створки окна и рабочую пластину для приведения в движение бегунка и работает таким образом, что рабочая пластина вертикально перемещается при помощи электродвигателя, и к устройству управления подъемом для устройства подъема и перемещения.
В общем устройством подъема и перемещения для окна является устройство для подъема и последующего перемещения створки окна при открытии или закрытии окна. Такое устройство подъема и перемещения широко используется для относительно больших окон, таких как внутренние двери в жилом помещении или балконные окна. Устройство подъема и перемещения обеспечивает бесшумное и плавное перемещение окна при открытии или закрытии, а также обеспечивает эффекты воздухонепроницаемости, водостойкости и звукоизоляции.
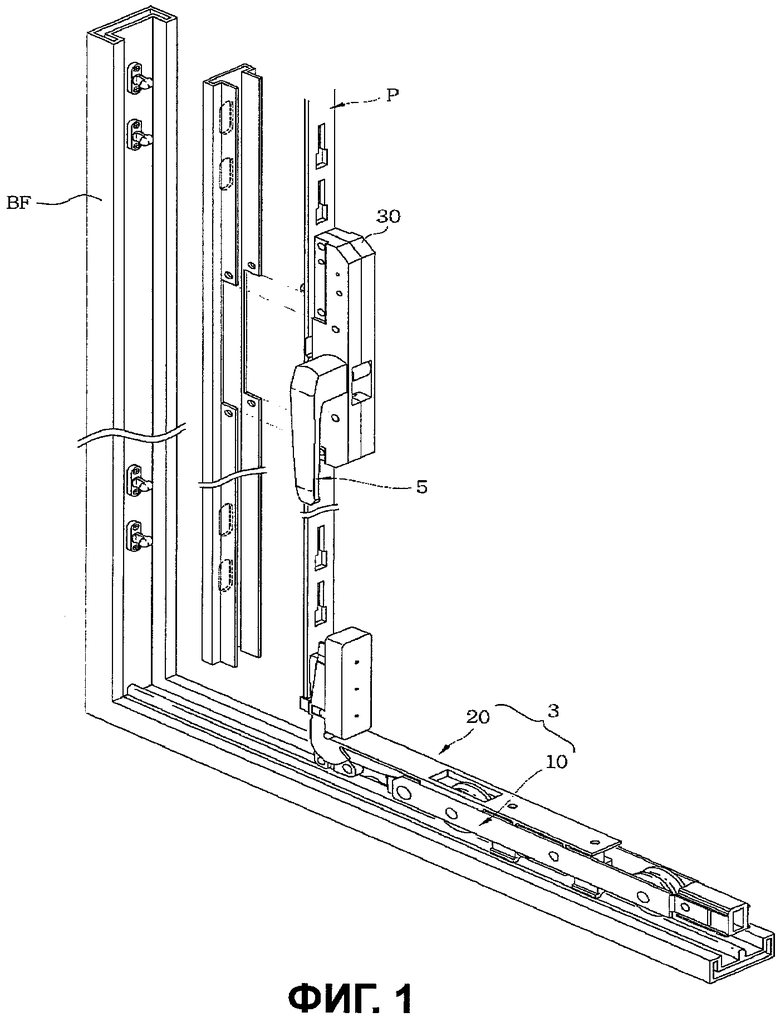
Устройство подъема и перемещения, упомянутое выше, будет описано со ссылкой на фиг.1. Обычное устройство подъема и перемещения включает в себя бегунок 3, прикрепленный к нижней части створки окна (не показана), и рабочую пластину Р, прикрепленную к поверхности створки окна, которая контактирует с рамой BF окна. Рабочая пластина Р поднимается посредством ручки 5, и таким образом бегунок 3 поднимает створку окна при помощи поднятой рабочей пластины Р. Конфигурация и приведение в движение данного устройства описаны в патенте Кореи № 721455, поэтому его детали в данном документе не рассматриваются.
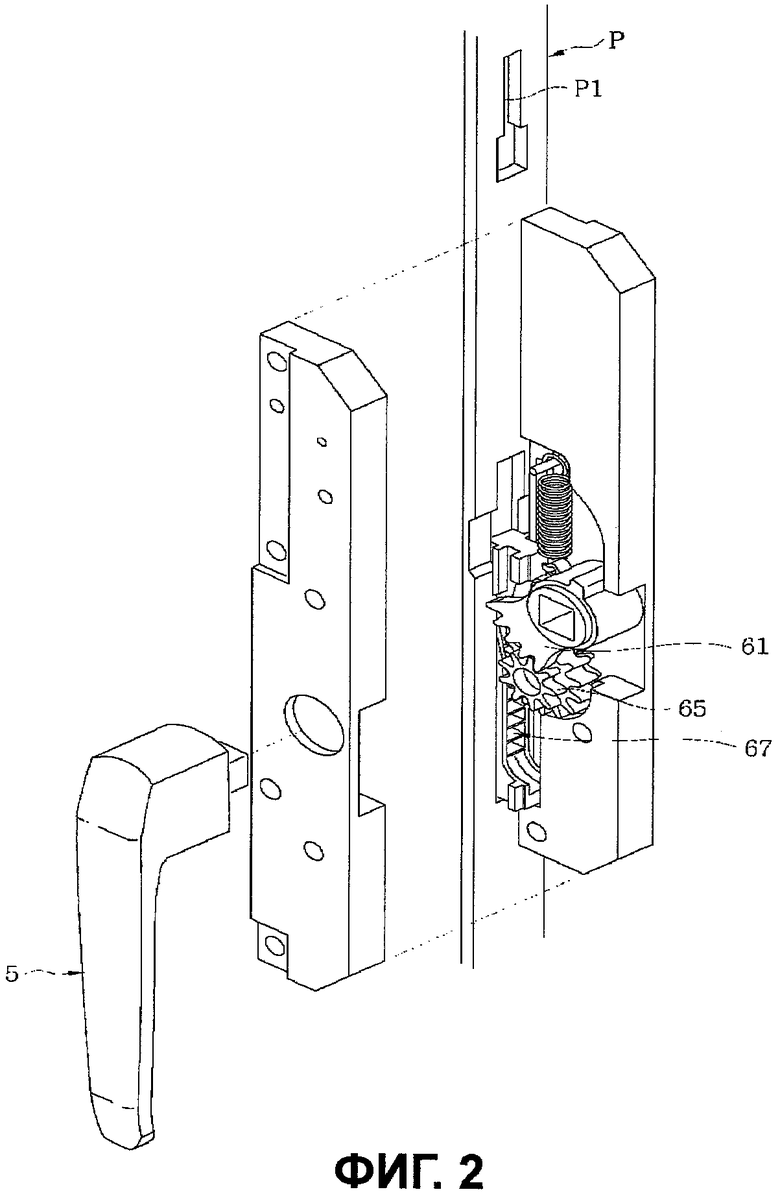
Между тем операция подъема рабочей пластины Р будет описана со ссылкой на фиг.2. В известном уровне техники ручка 5 выполнена с возможностью вращения ведущей шестерни 61, и, следовательно, ведомая шестерня 65 вращается таким образом, что шестерня 67 зубчатой рейки, находящаяся в зацеплении с ведомой шестерней 65, поднимается, поднимая рабочую пластину Р. Таким образом, рама створка поднимается, как описано выше, и пользователь может легко перемещать створку окна.
Однако в случае обычного устройства для подъема и перемещения пользователь для обеспечения подъема и перемещения окна должен приводить в движение ручку 5, как описано выше, что неудобно. В частности, инвалид или пожилой, или немощный человек, который не способен приводить в движение ручку 5, не способен открывать или закрывать окно.
Настоящее изобретение создано для решения вышеупомянутых проблем. Задачей настоящего изобретения является создание устройства подъема и перемещения, которое способно поднимать и перемещать раму створку посредством подъема рабочей пластины с использованием электрической энергии, тем самым повышая удобство использования и позволяя даже инвалиду или пожилому, или немощному человеку открывать или закрывать окно.
Кроме того, другой задачей настоящего изобретения является создание устройства управления, которое содержит электроды, установленные в каждой предельной точке вертикального перемещения ползуна, для регистрации контакта с ползуном, и обеспечивает точное управление перемещением ползуна с использованием сигнала, передаваемого из электродов, тем самым предотвращая чрезмерную нагрузку на электродвигатель и обеспечивая надежное перемещение вверх створки окна.
Упомянутые задачи могут быть достигнуты посредством создания устройства подъема и перемещения для окна с электроприводом, которое включает в себя шариковый винт, вращаемый электродвигателем, ползун, зацепленный с помощью резьбы с шариковым винтом, для обеспечения вертикального перемещения, выступ, выступающий из ползуна и захватываемый в щель, образованную в рабочей пластине, для подъема рабочей пластины посредством перемещения ползуна, и опорные пластины, установленные соответственно на обоих концах шарикового винта для обеспечения его опоры.
Упомянутые задачи могут быть также достигнуты посредством создания устройства управления подъемом окна с электроприводом, включающего в себя выводы для определения положения, каждый из которых электрически соединен с парой электродов для определения положения, установленных в каждой из верхней и нижней предельных точках перемещения ползуна и электрически соединяемых друг с другом посредством контакта с ползуном, и электроды устройства управления для определения положения для передачи сигнала в устройство управления посредством контакта с выводами.
Сущность изобретения поясняется на чертежах, где:
на фиг.1 и 2 изображен вид в перспективе и вид в перспективе с разделением элементов обычного устройства подъема и перемещения;
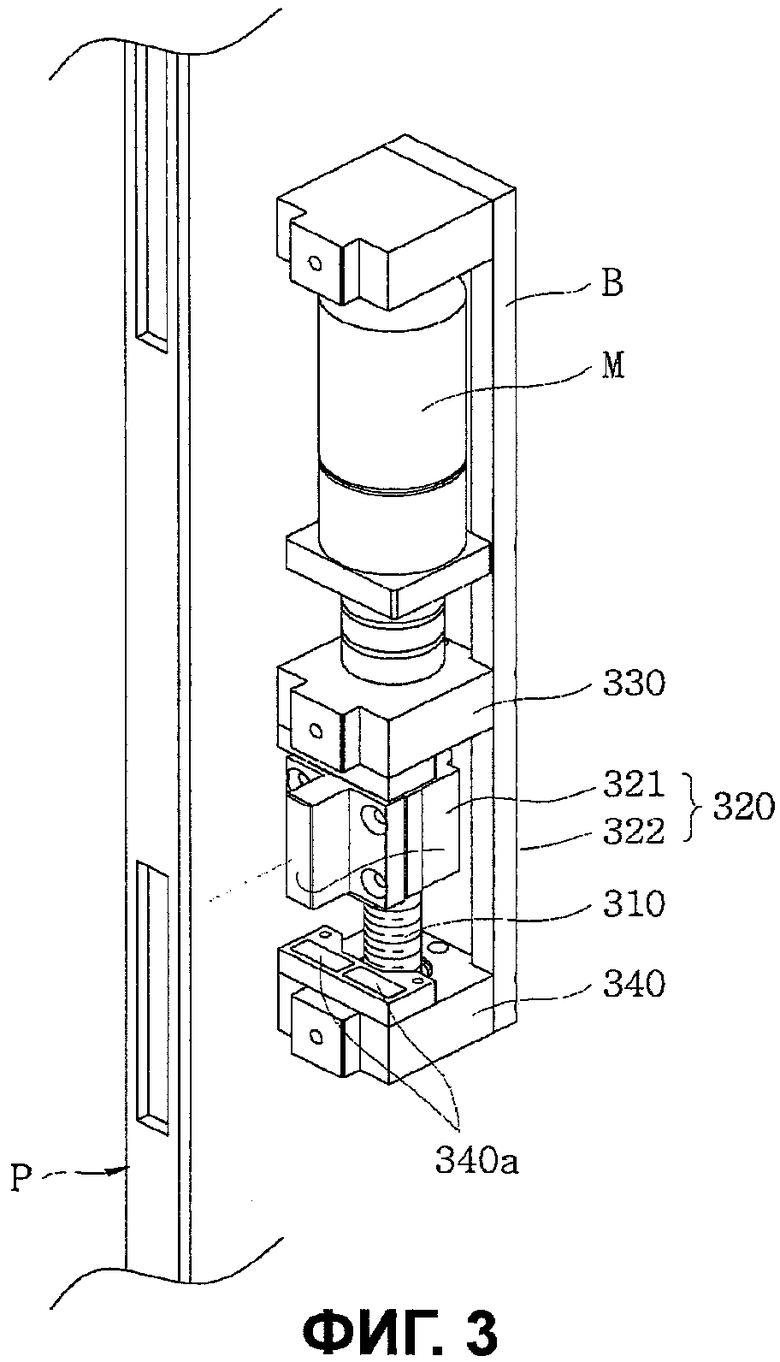
на фиг.3 изображен вид в перспективе с разделением элементов устройства подъема и перемещения в соответствии с настоящим изобретением;
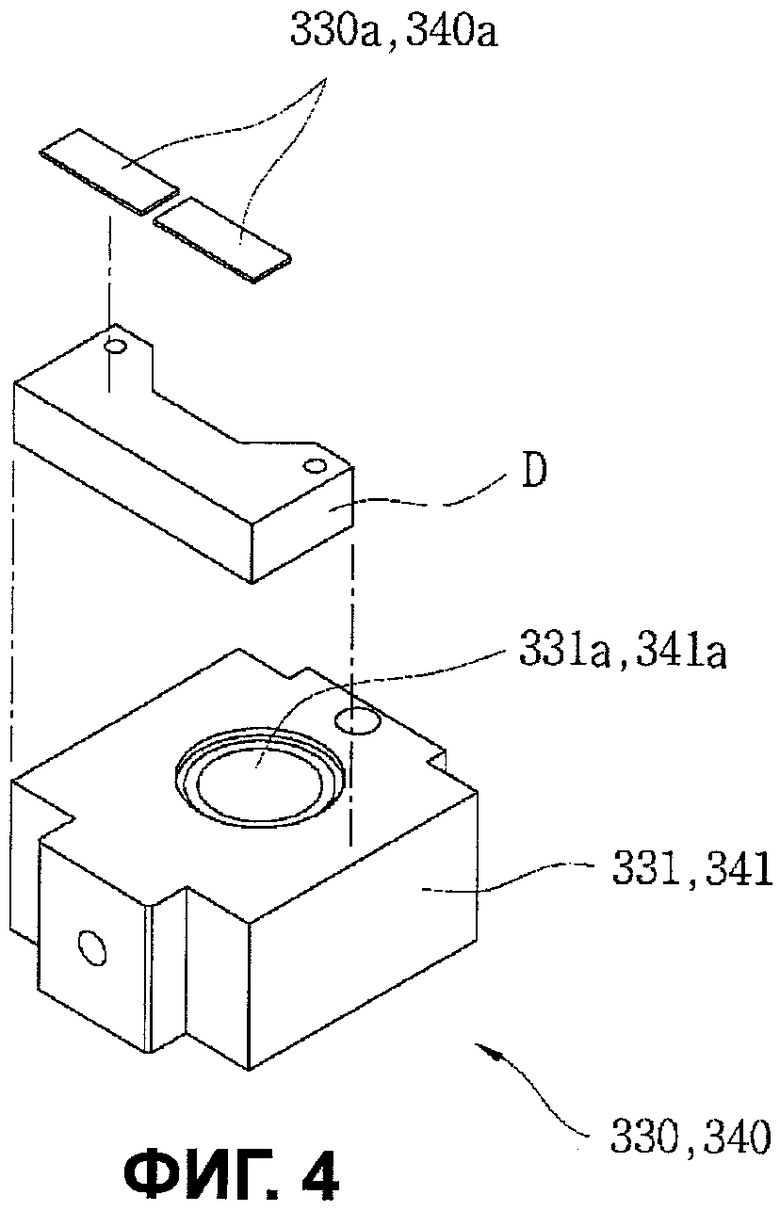
на фиг.4 изображен вид в перспективе с разделением элементов опорной пластины настоящего изобретения;
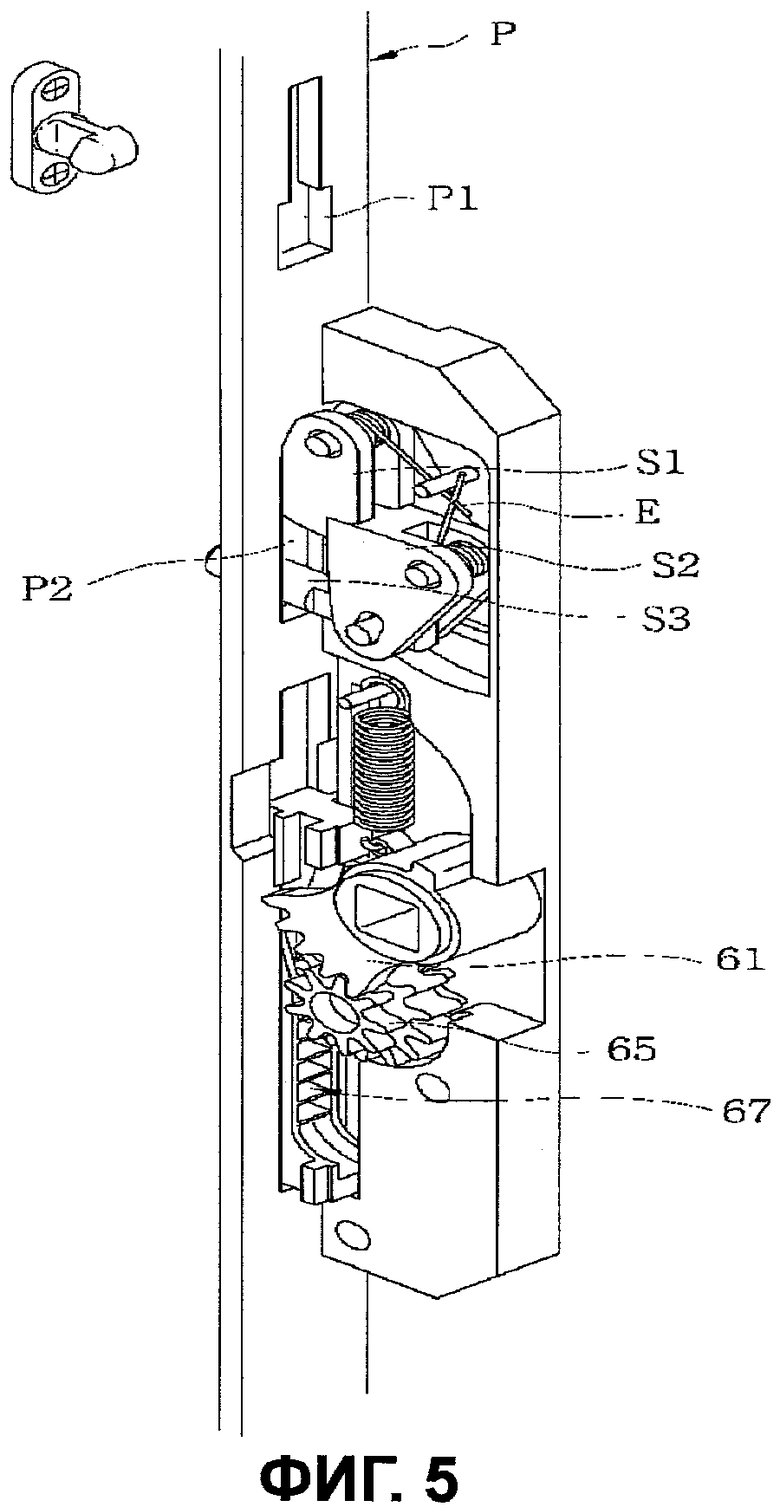
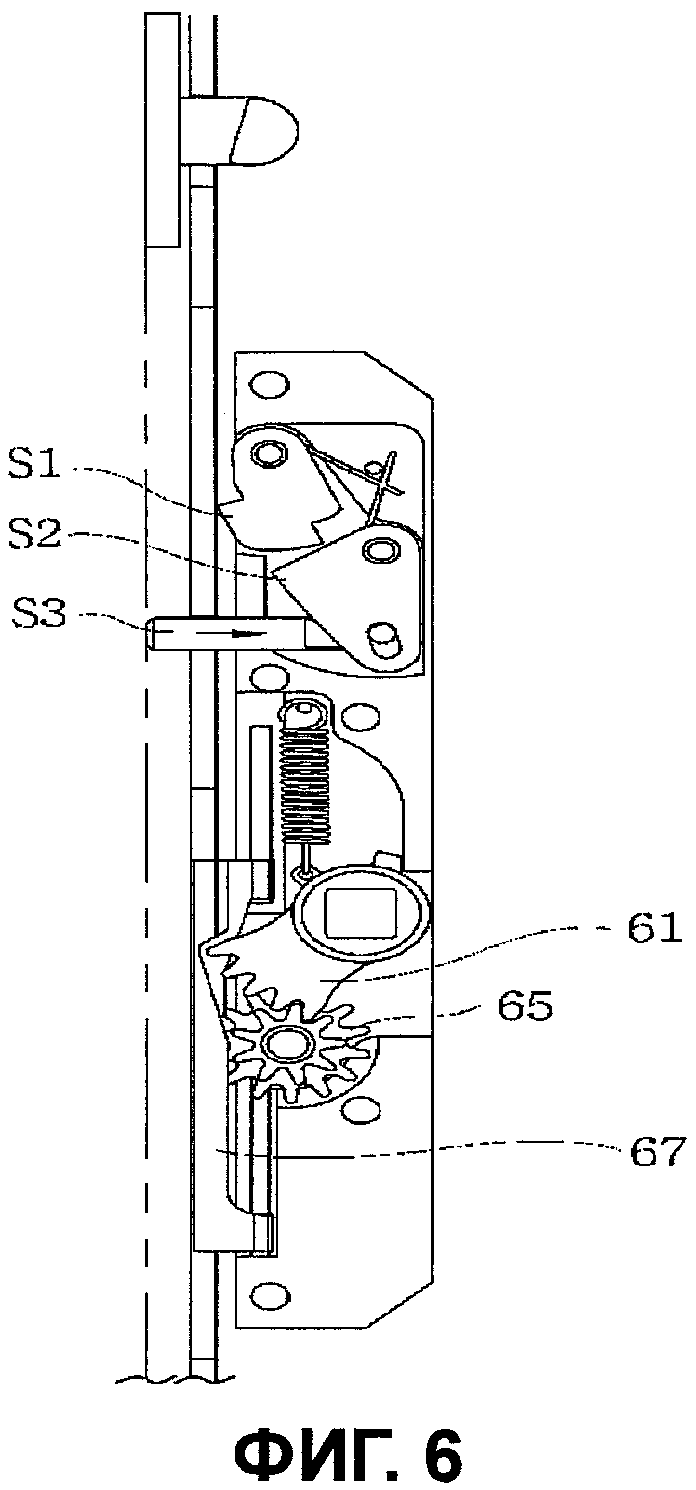
на фиг.5 и 6 изображен вид в перспективе и вид спереди фиксатора и элемента для удерживания фиксатора настоящего изобретения;
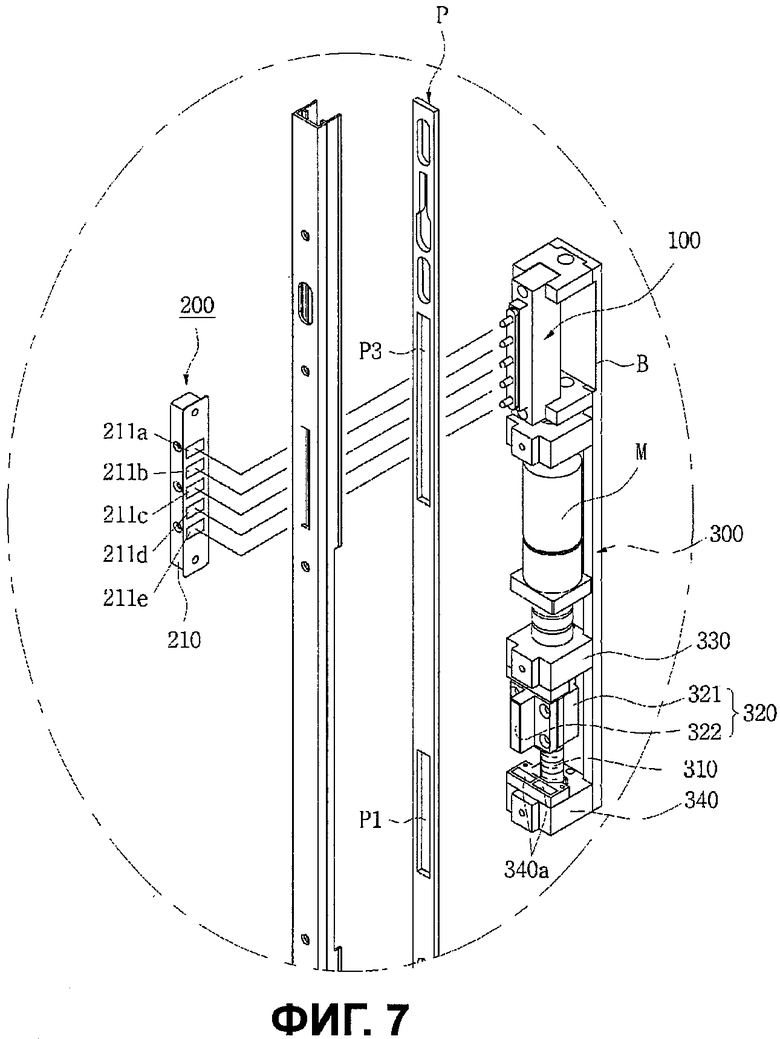
на фиг.7 изображен вид в перспективе с разделением элементов устройства управления для управления устройством подъема с электроприводом в соответствии с настоящим изобретением;
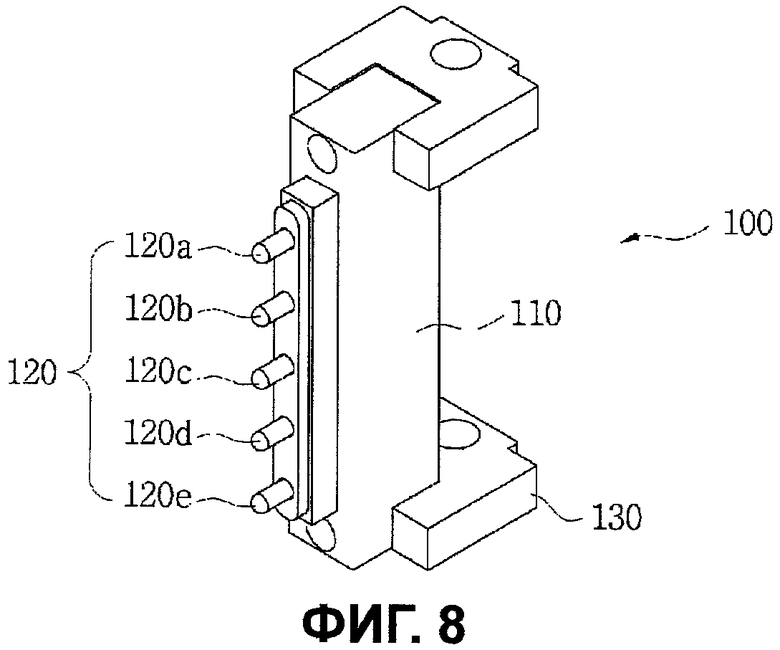
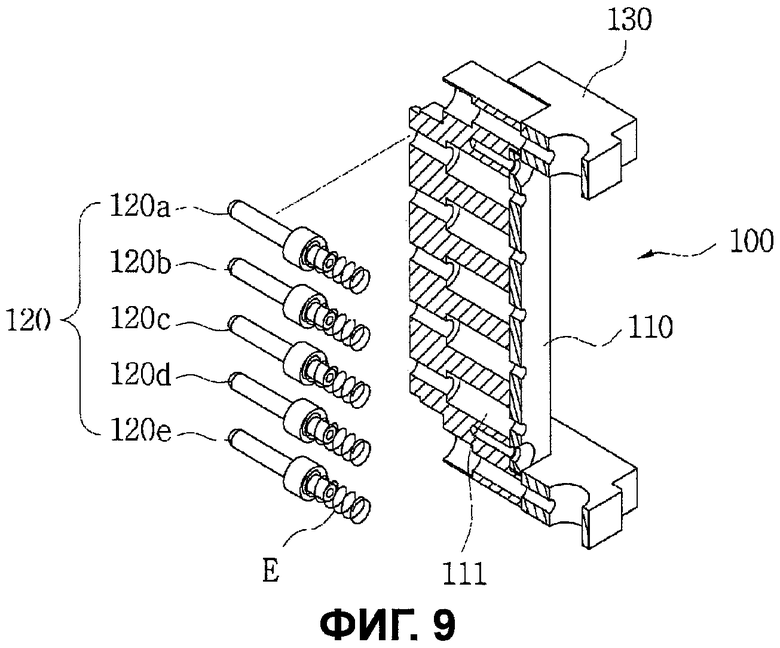
на фиг.8 и 9 изображен вид в перспективе и вид в перспективе в разрезе контактного узла настоящего изобретения; и
на фиг.10 изображена принципиальная схема устройства управления настоящего изобретения.
Настоящее изобретение относится к устройству подъема и перемещения для окна, включающему в себя бегунок для подъема створки окна и рабочую пластину для приведения в движение бегунка, в котором рабочая пластина вертикально перемещается при помощи электродвигателя.
Ниже настоящее изобретение будет описано подробно посредством вариантов осуществления и прилагаемых чертежей.
1-й вариант осуществления
В данном варианте осуществления узел 300 электродвигателя включает в себя ползун 320, фиксируемый с рабочей пластиной Р, для вертикального перемещения рабочей пластины Р, шариковый винт 310, зацепленный при помощи резьбы с ползуном 320, для перемещения ползуна 320 и электродвигатель М для вращения шарикового винта 310, как показано на фиг.3.
То есть для приведения в движение бегунка 3, как описано выше, рабочая пластина Р должна вертикально перемещаться. Данный вариант осуществления выполнен таким образом, что ползун 320 фиксируется с рабочей пластиной Р и затем вертикально перемещается.
При этом электродвигатель М вращает шариковый винт 310. Использование шарикового винта 310 обусловлено тем, что он имеет меньшее трение на своей резьбе, а также способен обеспечить высокую точность, поскольку мертвый ход может приближаться к нулю.
Между тем ползун 320 закреплен на шариковом винте 310 посредством резьбового зацепления. То есть вращение шарикового винта 310 вызывает вертикальное перемещение ползуна 320.
При этом ползун 320 включает в себя корпус 321, содержащий винтовую резьбу, выполненную в нем с возможностью зацепления при помощи резьбы с шариковым винтом 310, и выступ 322, выступающий из одной стороны корпуса 321 и фиксируемый со щелью Р1 рабочей пластины Р, как описано выше.
Кроме того, опорные пластины 330 и 340 установлены соответственно на обеих сторонах шарикового винта 310 для опоры шарикового винта 310.
В такой конфигурации при вращении электродвигателя М вращается шариковый винт 310, и тогда ползун 320, зацепленный при помощи резьбы с шариковым винтом 310, вертикально перемещается. В результате выступ 322, выступающий из ползуна 320 и фиксируемый со щелью Р1 рабочей пластины Р, поднимает рабочую пластину Р. Таким образом, если рабочая пластина Р поднимается, бегунок 3 поднимает створку окна, как описано выше.
Между тем в настоящем изобретении шариковый винт 310 вращается при помощи электродвигателя М и соответственно рабочая пластина Р поднимается, как описано выше. При этом необходимо управление перемещением вверх рабочей пластины Р.
Для данной цели, как показано на фиг.4, предусмотрена пара электродов 330а или 340а для определения положения на каждой из внутренних поверхностей опорных пластин 330 и 340, т.е. на поверхности, с которой контактирует ползун 320.
Однако, поскольку опорные пластины 330 и 340 имеют одинаковую форму, на чертеже проиллюстрирована только одна из опорных пластин.
Электроды 330а или 340а для определения положения установлены на расстоянии друг от друга и электрически соединяются посредством контакта с ползуном 320. Благодаря данной конфигурации электроды 330а или 340а для определения положения определяют положение ползуна 320, и в таком случае можно управлять перемещением рабочей пластины Р.
Более конкретно, ползун 320 вертикально перемещается при помощи шарикового винта 310, как описано выше. Например, если ползун 320 перемещается вверх в верхнюю предельную точку, т.е. к верхней опорной пластине 330, ползун 320 приводится в контакт с электродами 330а для определения положения, установленными на верхней опорной пластине 330. При этом электроды 330а для определения положения, которые расположены на расстоянии друг от друга и, таким образом, электрически не соединены друг с другом, приводятся в контакт при помощи ползуна и посредством этого электрически соединяются друг с другом. Если генерируемый соответствующим образом сигнал регистрируется, то можно определить, что ползун 320 достигает верхней предельной точки и, таким образом, прекратить работу электродвигателя М.
Между тем опорная пластина 330 или 340 содержит крепежное отверстие 331а или 341а, которое выполнено в корпусе 331 или 341 опорной пластины с возможностью зацепления при помощи резьбы с шариковым винтом 310. При этом между электродами 330а или 340а для определения положения и корпусом 331 или 341, предпочтительно установлено демпфирующее устройство D для смягчения удара, возникающего в результате контакта с ползуном 320.
Между тем устройство для регистрации сигнала и прекращения работы электродвигателя М будет описано ниже.
Как описано выше, в настоящем изобретении шариковый винт 310 вращается посредством вращающего усилия от электродвигателя М, и соответственно ползун 320 перемещается вверх, поднимая рабочую пластину Р, в результате чего бегунок 3 поднимает створку окна. При этом если требуется поднять створку окна посредством поднятия рабочей пластины Р и затем переместить створку окна, то ползун 320 должен удерживать поднимаемую рабочую пластину Р, что может вызвать чрезмерную нагрузку на электродвигатель М. Следовательно, данная проблема должна быть решена.
Данная конфигурация для решения упомянутой проблемы будет описано со ссылкой на фиг.5. При этом фиг.5 показывает, что устройство подъема настоящего изобретения используется совместно с обычным устройством подъема, использующим ручку, как показано на фиг.1 и 2. Хотя на фиг.5 это не показано, узел 300 электродвигателя берет на себя нагрузку вертикального перемещения рабочей пластины Р, и при использовании конфигурации, изображенной на фиг.5, предотвращается чрезмерная нагрузка на упомянутый электродвигатель М.
То есть в рабочей пластине Р выполнена другая щель, т.е. щель Р2 для захвата фиксатора, и фиксатор S1 выполнен таким образом, что он захватывался в щель Р2 для захвата фиксатора. Фиксатор S1 закреплен с возможностью вращения в раме створки окна, на которой закреплена рабочая пластина Р. При этом на фиксаторе S1 установлен упругий элемент Е, такой как пружина, так что для поворота фиксатора S1 по направлению к рабочей пластине Р используется упругая сила.
В соответствии с данной конфигурацией, когда ползун 320 перемещает вверх рабочую пластину Р, как описано выше, фиксатор S1 захватывается в щель Р2 для захвата фиксатора. Это осуществляется таким образом, что фиксатор S1 под действием упругой силы упругого элемента Е поворачивается, а затем входит в щель Р2 для захвата фиксатора.
При этом когда ползун 320 опускается, рабочая пластина Р не опускается, поскольку фиксатор S1 захвачен в нее, и в результате створка окна может удерживаться в поднятом положении. То есть это означает, что створка окна может удерживаться в поднятом положении, даже если нагрузка постоянно не прикладывается к электродвигателю. Таким образом, данная конфигурация способна увеличить срок службы устройства подъема и перемещения настоящего изобретения.
Между тем, когда фиксатор S1 поддерживает рабочую пластину Р, как описано выше, фиксатор S1 может поворачиваться в противоположном направлении под действием веса рабочей пластины Р и таким образом выходить из рабочей пластины Р. Для закрепления фиксатора S1 предусмотрен элемент S2 для удерживания фиксатора.
Элемент S2 для удерживания фиксатора установлен с возможностью вращения под фиксатором S1 и воспринимает упругую силу от упругого элемента Е для поворота по направлению к рабочей пластине Р. При этом верхняя часть элемента S2 для удерживания фиксатора выполнена с возможностью зацепления с нижней стороной фиксатора S1.
В соответствии с такой конфигурацией, когда фиксатор S1 поддерживает рабочую пластину Р, элемент S2 для удерживания фиксатора под фиксатором S1 закрепляет фиксатор S1, не позволяя ему поворачиваться, в результате чего фиксатор S1 не выходит из рабочей пластины Р, удерживая створку окна в поднятом положении.
Между тем поднятое положение створки окна поддерживается при помощи фиксатора S1 и элемента S2 для удерживания фиксатора, как описано выше. При этом когда нужно опустить створку окна, требуется конфигурация для опускания рабочей пластины Р. Для данной цели на элементе S2 для удерживания фиксатора можно установить переключатель S3 блокирования управления. При этом переключатель S3 блокирования управления выполнен с возможностью выступания с одной стороны элемента S2 для удерживания фиксатора и затем прохождения через щель Р2 для захвата фиксатора рабочей пластины Р.
В соответствии с данной конфигурацией, если переключатель S3 блокирования управления прижат в положение, в котором элемент S2 для удерживания фиксатора и фиксатор S1 прикреплены друг к другу, элемент S2 для удерживания фиксатора поворачивается, тем самым расцепляясь с фиксатором S1, так что фиксатор S1 может свободно вращаться. Таким образом, фиксатор S1 поворачивается под действием веса рабочей пластины Р, захваченной фиксатором S1, и, следовательно, фиксатор S1 выходит из щели Р2 для захвата фиксатора, так что рабочая пластина Р опускается, и створка окна перемещается вниз (см. фиг.6).
2-й вариант осуществления
Данный вариант осуществления относится к управлению вышеупомянутым узлом 300 электродвигателя и включает в себя контактный узел 100 и устройство 200 управления для осуществления управления. Ниже данный вариант осуществления будет описан со ссылкой на фиг.7-10.
Электроды 330а или 340а для определения положения в соответствии с 1-м вариантом осуществления выполнены в паре на расстоянии друг от друга, как уже было описано. Таким образом, электроды 330а или 340а для определения положения электрически не соединяются друг с другом в обычном положении, однако электроды 330а или 340а для определения положения электрически соединяются друг с другом посредством ползуна 320, когда они приводятся в контакт с ползуном 320.
Когда пара электродов 330а или 340а для определения положения электрически соединяются друг с другом, как описано выше, устройство 200 управления принимает сигнал и осуществляет точное управление перемещением рабочей пластины Р посредством управления электродвигателем М. Контактный узел 100 выполнен с возможностью передачи сигнала в устройство 200 управления.
То есть контактный узел 100 выполнен с возможностью передачи сигнала, генерируемого из пары электродов 330а или 340а для определения положения в устройство 200 управления, которое будет описано ниже со ссылкой на фиг.8 и 9.
Контактный узел 100 включает в себя выводы 120d и 120е для определения положения, каждый из которых электрически соединен с парой электродов 330а или 340а для определения положения, и корпус 110 контактного узла для размещения выводов 120d и 120е для определения положения.
Корпус 110 контактного узла выполнен с емкостью 111 для размещения одних сторон выводов 120d и 120е для определения положения и открытия их дистальных концов.
То есть сигнал, генерируемый в том случае, когда электроды 330а и 340а для определения положения электрически соединены, передается в вывод 120d или 120е для определения положения и затем передается в устройство 200 управления.
При этом электроды 330а и 340а для определения положения и выводы 120d и 120е для определения положения соединены хорошо известным способом, который в данном документе подробно не описан.
Посредством контактного узла 100, как описано выше, сигнал передается в устройство 200 управления. Устройство 200 управления включает в себя электроды 211d и 211е устройства управления для определения положения, расположенные на корпусе 210 устройства управления и соответственно контактирующие и электрически соединяющиеся с выводами 120d и 120е для определения положения, и электроды 211d и 211е соединяются с приводом С для управления.
В соответствии с вышеупомянутой конфигурацией можно осуществлять управление вертикальным перемещением рабочей пластины Р, которое будет описано ниже более подробно.
Прежде всего, когда ползун 320 поднимается в самое верхнее положение, ползун 320 контактирует с парой электродов 330а для определения положения, установленных на опорной пластине 330. При этом пара электродов 330а для определения положения электрически соединяются друг с другом посредством ползуна 320, и сигнал передается в вывод 120d для определения положения. Затем электрод 211d устройства управления для управления положением в контакте с выводом 120d для определения положения принимает сигнал и передает его в привод С.
В результате привод С посредством сигнала определяет, что ползун 320 достигает самой верхней точки из предельных точек перемещения, и затем прекращает работу электродвигателя М.
В соответствии с данной конфигурацией можно осуществлять точное управление перемещением рабочей пластины, тем самым можно предотвратить приложение чрезмерной нагрузки к электродвигателю М или надежно поднимать створку окна.
Между тем упомянутая процедура может быть по аналогии использована в том случае, когда ползун 320 опускается в самую нижнюю точку.
При этом в целях более надежного управления, предпочтительно также, чтобы выводы 120а и 120b источника питания для обеспечения электропитания и общий контактный вывод 120с, электрически соединенные с одним из верхних электродов 330а для определения положения и одним из нижних электродов 340а для определения положения, были установлены совместно в корпусе 110 контактного узла, помимо выводов 120d и 120е для определения положения, как показано на фиг.8 и 9.
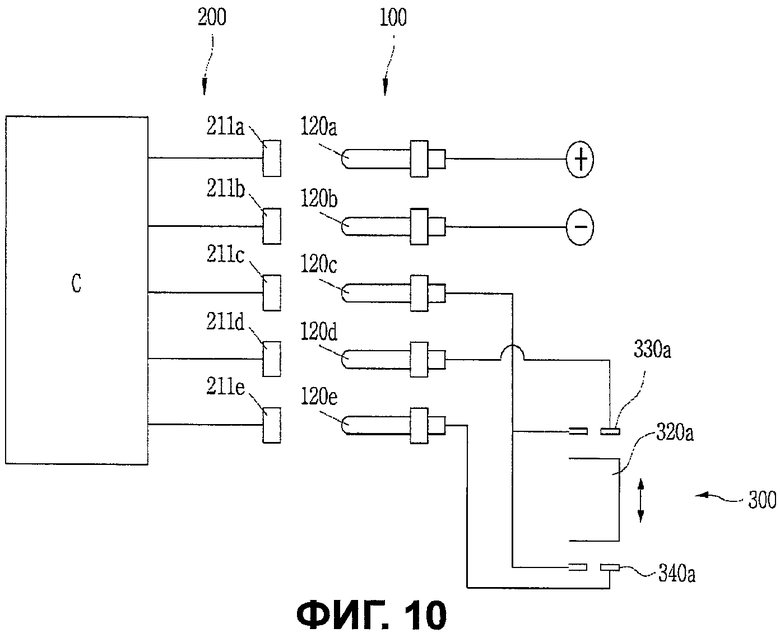
Настоящее изобретение, выполненное таким образом, описано более подробно со ссылкой на фиг.10.
Фиг.10 представляет собой принципиальную схему, иллюстрирующую принцип передачи сигнала в соответствии с работой контактного узла 100, устройства 200 управления и ползуна 320.
Как показано на фиг.10, когда ползун 320 поднимается в самую верхнюю точку, верхние электроды 330а для определения положения электрически соединяются посредством контакта с ползуном 320 для передачи сигнала в вывод 120d для определения положения, а также сигнал передается в общий контактный вывод 120с. Таким образом, вывод 120d для определения положения и общий контактный вывод 120с электрически соединяются для передачи сигнала в электрод 211d устройства управления для определения положения и общий контактный электрод 211с устройства управления 200, и сигнал поступает в привод С для прекращения работы электродвигателя М, как описано выше.
Между тем устройство управления 200 может быть выполнено в любом положении, если оно может быть электрически соединено с контактным узлом 100, как описано выше, и в данном варианте осуществления устройство 200 управления прикрепляется к раме окна (не показана), как показано на фиг.7. Кроме того, различные выводы для определения положения контактного узла 100 электрически соединяются с различными электродами 211а, 211b, 211c и 211d устройства 200 управления посредством щели Р3, выполненной на одной стороне рабочей пластины Р.
Промышленная применимость
Как описано выше, обычное устройство подъема и перемещения способно поднимать или перемещать створку окна только тогда, когда пользователь управляет ручкой, что неудобно. Кроме того, существует проблема, которая заключается в том, что инвалид или пожилой, или немощный человек не способен открывать или закрывать окно.
Однако устройство поднятия и перемещения для окна в соответствии с настоящим изобретением не требует непосредственного управления пользователя, и инвалид или пожилой, или немощный человек способен открывать или закрывать окно.
Кроме того, устройство управления подъемом для окна с электроприводом в соответствии с настоящим изобретением включает в себя выводы для определения положения, каждый из которых электрически соединен с парой электродов для определения положения, установленных в каждой из верхней и нижней предельных точках перемещения ползуна и электрически соединяемых друг с другом посредством контакта с ползуном, и электроды устройства управления для определения положения для передачи сигнала в устройство управления посредством контакта с выводами. Таким образом, преимущество заключается в том, что можно предотвратить приложение чрезмерной нагрузки к электродвигателю и обеспечить надежную операцию подъема створки окна.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПРИВЕДЕНИЯ В ДЕЙСТВИЕ РЕВЕРСОРА ТЯГИ С ПРЕПЯТСТВУЮЩИМ ВЫДВИЖЕНИЮ СРЕДСТВОМ И СПОСОБ ЕГО РАБОТЫ | 2018 |
|
RU2727498C1 |
| ПРИВОД ДВИГАТЕЛЬНЫЙ МАЛОГАБАРИТНЫЙ | 2017 |
|
RU2675288C1 |
| УСТРОЙСТВО ДЛЯ НАНЕСЕНИЯ ПОКРЫТИЯ И СПОСОБ НАНЕСЕНИЯ ПОКРЫТИЯ | 2018 |
|
RU2719973C1 |
| УСТРОЙСТВО ДЛЯ ФИКСАЦИИ СТВОРКИ В ОТКРЫТОМ ПОЛОЖЕНИИ | 2011 |
|
RU2484226C1 |
| Контактное устройство | 1989 |
|
SU1762427A1 |
| УСТРОЙСТВО для ПРОБИВКИ оконв | 1969 |
|
SU241382A1 |
| КОНСТРУКЦИЯ ОКНА ИЛИ ДВЕРИ | 2002 |
|
RU2288335C2 |
| Гидравлическая лебедка | 1983 |
|
SU1105451A2 |
| БАРОКАМЕРА ДЛЯ МЕДИЦИНСКИХ ИССЛЕДОВАНИЙ | 1991 |
|
RU2061450C1 |
| Устройство для электроэрозионной прошивки отверстий | 1986 |
|
SU1664484A1 |
Устройство подъема и перемещения для окна с использованием электропривода содержит бегунок для подъема створки окна, рабочую пластину для приведения в движение бегунка и узел электродвигателя для вертикального перемещения рабочей пластины. Узел электродвигателя содержит ползун, фиксируемый с рабочей пластиной, для вертикального перемещения рабочей пластины, шариковый винт, зацепленный посредством резьбы с ползуном, для перемещения ползуна и электродвигатель для вращения шарикового винта. Изобретение также относится к устройству управления подъемом окна с электроприводом. Заявленная группа изобретений позволяет легко открывать и закрывать окно, а также обеспечивает предотвращение приложения чрезмерной нагрузки к электродвигателю и надежную операцию подъема створки окна. 2 н. и 8 з.п. ф-лы, 10 ил.
1. Устройство подъема и перемещения для окна с использованием электропривода, содержащее: бегунок для подъема створки окна; рабочую пластину для приведения в движение бегунка; и узел электродвигателя для вертикального перемещения рабочей пластины, в котором узел электродвигателя содержит ползун, фиксируемый с рабочей пластиной, для вертикального перемещения рабочей пластины; шариковый винт, зацепленный посредством резьбы с ползуном, для перемещения ползуна; и электродвигатель для вращения шарикового винта.
2. Устройство подъема и перемещения по п.1, содержащее также выступ, выступающий из ползуна и захватываемый в щель, выполненную в рабочей пластине с возможностью перемещения рабочей пластины вверх посредством перемещения ползуна; опорные пластины, установленные соответственно на обоих концах шарикового винта, для опоры шарикового винта.
3. Устройство подъема и перемещения по п.2, содержащее также пару электродов для определения положения, расположенных на каждой из внутренних поверхностей опорных пластин, при этом пара электродов для определения положения определяет положение ползуна, когда пара электродов для определения положения приводится в контакт с ползуном и посредством этого электрически соединяется друг с другом.
4. Устройство подъема и перемещения по п.1, содержащее также щель для захвата фиксатора, образованную в одной стороне рабочей пластины; фиксатор, закрепленный с возможностью вращения в раме створки окна и воспринимающий упругую силу от упругого элемента для поворота по направлению к рабочей пластине; элемент для удерживания фиксатора, закрепленный с возможностью вращения под фиксатором с возможностью зацепления с частью нижней боковой поверхности фиксатора, при этом элемент для удерживания фиксатора воспринимает упругую силу от упругого элемента для поворота по направлению к рабочей пластине, причем если рабочая пластина поднимается посредством перемещения вверх ползуна, фиксатор поворачивается и захватывается в щель для захвата фиксатора, и элемент для удерживания фиксатора закрепляет фиксатор для предотвращения его поворота, тем самым поддерживая поднятое положение створки окна, так что рабочая пластина не опускается, даже если ползун опускается.
5. Устройство подъема и перемещения по п.4, содержащее также переключатель блокирования управления, выступающий с одной стороны элемента для удерживания фиксатора для прохождения через щель для захвата фиксатора рабочей пластины, причем, когда переключатель блокирования управления прижат, элемент для удерживания фиксатора поворачивается, расцепляясь с фиксатором, в результате чего фиксатор выходит из щели для захвата фиксатора рабочей пластины.
6. Устройство подъема и перемещения по п.1, содержащее также соединение для соединения шарикового винта с вращающимся валом электродвигателя.
7. Устройство подъема и перемещения по п.3, содержащее также демпфирующее устройство, установленное между опорной пластиной и электродом для определения положения для ослабления удара, возникающего в результате контакта с ползуном.
8. Устройство управления подъемом окна с электроприводом, которое используется для управления устройством подъема и перемещения для окна с использованием электропривода по одному из пп.1-7, при этом устройство управления содержит:
контактный узел, содержащий выводы для определения положения, электрически соединенные с парой электродов для определения положения, и корпус контактного узла, содержащий емкость, образованную в нем для размещения частей выводов для определения положения и открытия дистальных концов данных выводов; и
устройство управления, содержащее электроды устройства управления для определения положения, соответственно контактирующие и электрически соединяющиеся с выводами для определения положения, и привод для приема сигнала из электродов устройства управления для определения положения для обеспечения управления.
9. Устройство управления подъемом по п.8, содержащее также общий контактный вывод, размещаемый в корпусе контактного узла и электрически соединенный с верхним и нижним электродами для определения положения совместно, и выводы электропитания для обеспечения электропитания для приведения в действие блока электродвигателя; и
общий контактный электрод устройства управления и электроды электропитания устройства управления, контактирующие и электрически соединенные с общим контактным выводом и выводами электропитания и соединенные с приводом.
10. Устройство управления подъемом по п.8 или 9, содержащее также упругие элементы, установленные в емкости корпуса контактного узла для прижатия выводов для определения положения, общего контактного вывода и выводов электропитания, так что выводы для определения положения, общий контактный вывод и выводы электропитания находятся в плотном контакте с электродами устройства управления для определения положения, общим контактным электродом устройства управления и электродами электропитания устройства управления соответственно.
| KR 20060025389 A, 21.03.2006 | |||
| Устройство для получения корня стружки | 1987 |
|
SU1553254A1 |
| Устройство управления автоматическими линиями обработки деталей в жидкостях | 1976 |
|
SU682583A1 |
| СПОСОБ МИНИИНВАЗИВНОГО ЛЕЧЕНИЯ ЗАБОЛЕВАНИЙ И ТРАВМЫ ПОЗВОНОЧНО-ДВИГАТЕЛЬНОГО СЕГМЕНТА | 2005 |
|
RU2283055C1 |
| US 4616864 A, 14.10.1986 | |||
| Устройство для открывания и закрывания створки | 1976 |
|
SU676717A1 |

