Изобретение относится к способу оптимизации регистрации автомобилей, подлежащих оплате дорожного сбора, на платных дорогах дорожной сети с помощью установленного в автомобиле блока определения положения и связанного с ним, находящегося вне автомобиля блока управления, причем платные дороги на электронной карте дорожной сети наложены на зоны охвата, а установленный в автомобиле блок определения положения при определении положения автомобиля в пределах зоны охвата на основе лежащих в пределах зоны охвата данных о положении определяет важные для расчета дорожного сбора данные и передает их блоку управления, согласно ограничительной части п.1 формулы.
Для реализации взимания дорожного сбора до сих пор было предложено несколько решений. Так, были предложены системы, в которых на контрольных пунктах государственных, земельных или зонных границ можно приобрести карту оплаты дорожного сбора, которая позволяет воспользоваться желаемым участком дороги. Такая карта в большинстве случаев выдается автоматом на въезде на определенный платный участок дороги, а вычисленная с помощью соответствующего ключа расчета сумма оплачивается водителем на выезде либо наличными, либо кредитной картой.
Точно так же для лиц, работающих за пределами места жительства, и для водителей, часто пользующихся определенным участком дороги, может быть предусмотрен отдельный контрольный пункт с собственной полосой, где автомобиль идентифицируется посредством оптоэлектронного устройства считывания номерных знаков, и при наличии регистрации в пользовательской базе данных водителю разрешается проезд мимо шлагбаума. Подлежащая оплате сумма дорожного сбора оплачивается целиком или несколько раз в год списывается со счета участника такой системы платежа.
Точно так же возможна локализация автомобилей участников такой системы платежа посредством терминалов оплаты или контрольных пунктов, основанных на микроволновой связи. Такая электронная система платежа была реализована в Австрии для автоматического взимания дорожного сбора с автомобилей общей массой от 3,5 тонн. Для этого на всех платных участках национальной дорожной сети, т.е. в случае Австрии на автострадах и скоростных дорогах сооружаются терминалы оплаты дорожного сбора, которые оборудованы микроволновыми антеннами и сообщаются с мобильным детектирующим блоком, установленным в каждом автомобиле, подлежащем оплате дорожного сбора.
Однако гибко регулируемые методы взимания дорожного сбора приобретают все большее значение не только для легкового транспорта, но и, в частности, для грузового транспорта. Для этой цели в Европе все более широкое применение находит мобильный детектирующий блок, известный как «On-Board-Unit» и называемый ниже блоком определения положения. При этом речь идет о приборе, встраиваемом в грузовой или легковой автомобиль для обеспечения автоматического расчета сумм в системе взимания пошлин или дорожного сбора. Немецкие, французские, итальянские и испанские компании, эксплуатирующие автострады, а также и другие страны в Европе и за ее пределами привлекают блоки определения положения этого рода для регистрации дорожных сборов.
В таких системах в определенном автомобиле устанавливается электронный мобильный детектирующий блок. Он имеет приблизительно размер автомобильного радиоприемника и в большинстве случаев может быть вставлен в стандартное посадочное гнездо или смонтирован на панели приборов. Какие платные участки дорог конкретно использовались участниками такой системы, и какая сумма должна быть уплачена, можно определить посредством различных навигационных систем, взаимодействующих с детектирующим блоком. Известно, например, использование спутниковых систем обнаружения, причем эксплуатируемая Министерством обороны США система GPS (Global Positioning System) нашла в настоящее время наибольшее распространение для навигационных целей. С помощью GPS или эквивалентной системы обнаружения можно в любое время определить положение приемника с пространственным разрешением менее 10 м. Предусмотрев определенные дополнительные модули, например DGPS (Differenzial Global Positioning System - дифференциальная система GPS), в которой с помощью данных о положении стационарного базового приемника рассчитываются поправочные данные для мобильного приемника, можно определить положение автомобиля с пространственным разрешением даже менее 1 м.
При этом выполненные по индивидуальному заказу компоненты программного обеспечения заботятся о соответствующей связи полученных данных о географическом положении соответствующего автомобиля участника системы с хранящейся в памяти информацией о платных участках дорог в виде электронных карт всей дорожной сети и определяют сумму накопленных сборов, периодически передаваемых для расчета. Разумеется, в алгоритмах расчета сборов могут учитываться также временные данные, т.е. продолжительность пребывания автомобиля в определенной зоне взимания сбора.
Конкретно это может быть реализовано за счет того, что платные дороги дорожной сети в ее электронной карте накладываются на зоны охвата. При этом речь идет о геометрических фигурах, например окружностях, извилистых фигурах или замкнутых полигональных линиях (n углов), определяемых данными о географическом положении и дополнительными данными, например диаметром в случае кругообразной зоны охвата. Во время движения автомобиля, подлежащего оплате дорожного сбора, установленный в этом автомобиле блок определения положения непрерывно определяет данные о положении автомобиля. Эти данные о положении передаются в электронную карту дорожной сети и сравниваются с зонами охвата. Когда автомобиль во время движения въезжает в зону охвата, то находящиеся в пределах нее данные о положении накапливаются, пока автомобиль не покинет эту зону охвата. С помощью данных о положении в пределах зоны охвата можно далее вычислить количество пройденных в платной зоне километров и привлечь его для расчета дорожного сбора совместно с данными об автомобиле, например общей массе, или данными о пути, например разных суммах дорожного сбора.
При конфигурировании системы оплаты дорожного сбора существует, конечно, стремление регистрировать подлежащие оплате дорожного сбора поездки как можно точнее. По этой причине зоны охвата выбираются как можно меньшими, чтобы ошибочным образом не зарегистрировать автомобили, которые, правда, движутся в большой пространственной близости от платных зон, однако все же не движутся по платным дорогам. При этом зоны охвата должны как можно точнее регистрировать линию прохождения платных дорог. Нижняя граница величины зон охвата установлена, однако, пространственным разрешением определения положения автомобиля, а также отклонениями электронной карты дорожной сети от реальных условий. Кроме того, точность передачи положения автомобиля в электронную карту дорожной сети имеет пределы также за счет других факторов, которые часто могут быть обнаружены только за счет практического опыта. Поэтому, несмотря на добросовестное установление зоны охвата, при практической эксплуатации системы оплаты дорожного сбора может произойти так, что автомобиль будет двигаться по платной дороге, не будучи зарегистрирован системой, поскольку соответствующая зона охвата установлена неоптимально. Установлена ли зона охвата оптимально, можно, однако, выяснить часто только при практической эксплуатации, а именно за счет поездок, совершенных через зону охвата, но не зарегистрированных из-за субоптимального выбора зоны охвата. Однако именно эти поездки не обнаруживаются системой оплаты дорожного сбора из уровня техники. Последующая проверка всех поездок на основе сравнения данных о положении с зонами охвата невозможна из-за большого объема данных.
В DE 4344433 описаны «векторы координат въезда и выезда», с которыми коррелируются координаты местонахождения автомобиля. Однако в случае, если эти «векторы координат въезда и выезда» настроены неправильно, и поэтому непрерывно не регистрируются автомобили, находящиеся, тем не менее, в подлежащей оплате дорожного сбора зоне, или регистрируются автомобили, хотя они находятся за пределами этой зоны, отсутствует возможность последующей настройки.
В WO 95/20801 речь идет о «пунктах взимания дорожного сбора», в которых регистрируются автомобили. При «совпадении» положения автомобиля с положением пункта взимания дорожного сбора автомобиль пропускается. Однако отсутствует возможность текущего контроля позиционирования пунктов взимания дорожного сбора, определяемых «заданными географическими положениями», и осуществления возможных корректировок. В случае, если пункт взимания дорожного сбора выбран неправильно, или возникают систематические ошибки в определении положения автомобиля в этой зоне, то непрерывно возникают ошибки при взимании дорожного сбора, которые нельзя обнаружить в соответствии с WO 95/20801.
Поэтому задачей изобретения являются решение этой проблемы и, тем самым, оптимизация регистрации автомобилей, подлежащих оплате дорожного сбора. При этом, в частности, должен быть создан способ контроля, с помощью которого даже незарегистрированные поездки можно было бы подвергнуть последующему контролю без существенного увеличения при этом объема данных.
Эта задача решается посредством признаков п.1 формулы изобретения. П.1 относится к способу оптимизации регистрации автомобилей, подлежащих оплате дорожного сбора, на платных дорогах дорожной сети с помощью установленного в автомобиле блока определения положения и связанного с ним, находящегося вне автомобиля блока управления, причем платные дороги на электронной карте дорожной сети наложены на зоны охвата, а установленный в автомобиле блок определения положения при определении положения автомобиля в пределах зоны охвата на основе лежащих в пределах зоны охвата данных о положении определяет важные для расчета дорожного сбора данные и передает их блоку управления. Согласно изобретению на электронной карте дорожной сети дополнительно предусмотрены контрольные зоны, которые приданы зонам охвата и по своей пространственной протяженности выдаются за приданные им зоны охвата, причем при регистрации автомобилей исключительно в пределах контрольной зоны и за пределами зоны охвата блок определения положения передает блоку управления лежащие в пределах контрольной зоны данные о положении автомобилей, а блок управления осуществляет последующую проверку этих данных о положении, а также, при необходимости, согласование зоны охвата на электронной карте дорожной сети.
Решение, согласно изобретению, представляет собой, тем самым, компромисс между увеличением зон охвата, что привело бы к повышенной неточности системы оплаты дорожного сбора, и контролем всех поездок, что привело бы к огромному объему данных. Дополнительные контрольные зоны не вызывают заметного увеличения объема данных, поскольку поездки, так и так обнаруженные за счет определенного установления зоны охвата, обрабатываются обычным образом. Лишь в тех случаях, когда блок определения положения определяет положения автомобиля в пределах контрольной зоны, однако за пределами зоны охвата лежащие в пределах контрольной зоны данные о положении автомобиля передаются блоку управления для последующей проверки.
Для дальнейшего уменьшения объема данных по п.2 предусмотрено, что при определении положения автомобиля в пределах контрольной зоны и в пределах зоны охвата блок определения положения стирает данные о положении автомобиля, лежащие в пределах контрольной зоны и за пределами зоны охвата. Данные о положении, находящиеся в пределах контрольной зоны и, тем самым, в пределах зоны охвата, привлекаются известным образом для расчета дорожного сбора. В таких случаях не возникает никаких дополнительных затрат на обработку данных.
П.3 предусматривает предпочтительные действия по оптимизации системы оплаты дорожного сбора за счет того, что при повторном определении положения автомобиля исключительно в пределах контрольной зоны и за пределами зоны охвата осуществляется согласование зоны охвата на электронной карте дорожной сети. Согласование может представлять собой при этом незначительное смещение, другую геометрическую форму или незначительное увеличение зоны охвата.
П.4 предусматривает, что блок определения положения обрабатывает сигналы спутниковой навигационной системы.
Изобретение более подробно поясняется ниже с помощью прилагаемых чертежей, на которых изображают:
- фиг.1: схематично зону охвата на электронной карте дорожной сети и нанесенные данные о положении автомобиля для двух участков А и В;
- фиг.2: зону охвата из фиг.1, причем на нее наложена контрольная зона.
На фиг.1 в схематичном виде изображена зона охвата Е, установленная на электронной карте дорожной сети. Зона Е образована в данном примере окружностью, однако могут найти применение и другие геометрические формы, например извилистые фигуры или замкнутые полигональные линии. Целью зон охвата является максимально точное моделирование контура платных участков дорожной сети.
Дополнительно на фиг.1 нанесены также данные Р о положении, определяемые установленными в автомобилях блоками определения положения. При этом на фиг.1 показан первый участок А, ведущий через зону охвата Е. Для этого участка А известным образом определяется, находится ли автомобиль в отношении данных РЕ о его положении в пределах платной зоны. Данные РЕ временно хранятся в блоке определения положения, пока автомобиль не покинет зону охвата Е. После покидания зоны охвата Е на основе лежащих в ее пределах данных РЕ о положении преимущественно блоком определения положения определяется вся важная для оплаты дорожного сбора информация и в подготовленном виде передается на центральный блок управления. Последний выполняет затем все остальные шаги, необходимые для расчета с соответствующим участником системы.
Зоны охвата Е устанавливаются в ходе конфигурирования системы. Как уже упоминалось, при практической эксплуатации системы может произойти так, что автомобиль будет двигаться по платной дороге, не будучи зарегистрирован системой, поскольку соответствующая зона охвата Е установлена неоптимально. Этот случай обозначен на фиг.1 участком В. На участке В соответствующий автомобиль движется, правда, по платной дороге, однако эта подлежащая оплате поездка не обнаруживается блоком определения положения из-за субоптимального выбора зоны охвата Е. Эти случаи часто невозможно заранее обнаружить при конфигурировании системы, поскольку точность передачи положения автомобиля в электронную карту дорожной сети имеет пределы за счет факторов, обнаруживаемых только в результате практического опыта. Поездка по участку В не регистрируется, следовательно, мобильным блоком определения положения, и поэтому блоку управления не передаются никакие важные для расчета дорожного сбора данные.
Поэтому, согласно изобретению, предусмотрено снабжение зоны охвата Е дополнительной контрольной зоной К, которая по своей пространственной протяженности выдается за зону охвата Е, как это показано на фиг.2. Контрольная зона К выполнена в виде концентрической окружности вокруг кругообразной зоны охвата Е, однако может иметь и другие формы. Блок определения положения проверяет не только то, находятся ли полученные данные Р о положении в пределах зоны охвата Е, но и то, находятся ли они в пределах контрольной зоны К. Если данные Р о положении лежат как в пределах зоны охвата Е, так и контрольной зоны К, т.е. речь идет о данных РЕ на участке А, то лежащие в пределах зоны охвата Е данные РЕ обрабатываются дальше, а затем важные для системы оплаты дорожного сбора данные передаются блоку управления. Обработка данных РЕ о положении и передача обработанных, важных для системы оплаты дорожного сбора данных блоку управления происходят при этом традиционным образом.
Для участка В блок определения положения обнаруживает, что данные РК о положении лежат, правда, в пределах контрольной зоны К, однако не в пределах зоны охвата Е. В таких случаях возникает подозрение, что речь идет о подлежащей оплате дорожного сбора поездке, которая, однако, из-за субоптимального выбора зоны охвата Е не была обнаружена. В таких случаях лежащие в пределах контрольной зоны К данные РК о положении передаются на центральный блок управления, где производится проверка данных. При повторном определении положения автомобиля в пределах контрольной зоны К и за пределами зоны охвата Е может осуществляться согласование зоны охвата Е на электронной карте дорожной сети, которое передается, например, в виде соответствующего обновления программного обеспечения на мобильные блоки определения положения.
За счет этого можно оптимизировать регистрацию автомобилей, подлежащих оплате дорожного сбора, причем, в частности, создан способ, с помощью которого последующему контролю могут быть подвержены также незарегистрированные поездки без существенного увеличения при этом объема данных.

Изобретение относится к способу регистрации автомобилей, подлежащих оплате дорожного сбора, на платных дорогах дорожной сети. Технический результат - оптимизация регистрации автомобилей. Способ осуществляют с помощью установленного в автомобиле блока определения положения и связанного с ним, находящегося вне автомобиля блока управления, причем платные дороги на электронной карте дорожной сети наложены на зоны охвата (Е), а установленный в автомобиле блок определения положения при определении положения (РЕ) автомобиля в пределах зоны охвата (Е) на основе лежащих в пределах зоны охвата (Е) данных (РЕ) о положении определяет данные для расчета дорожного сбора и передает их блоку управления. При этом на электронной карте дорожной сети дополнительно предусмотрены контрольные зоны (К), которые приданы зонам охвата (Е) и по своей пространственной протяженности выдаются за приданные им зоны охвата (Е), причем при регистрации автомобилей исключительно в пределах контрольной зоны (К) и за пределами зоны охвата (Е) блок определения положения передает блоку управления лежащие в пределах контрольной зоны (К) данные (РК) о положении этих автомобилей, а посредством блока управления осуществляют проверку этих данных (РК) о положении таким образом, что при повторном определении положения автомобиля исключительно в пределах контрольной зоны (К) и за пределами зоны охвата (Е) осуществляют геометрическое согласование зоны охвата (Е) на электронной карте дорожной сети. 2 з.п. ф-лы, 2 ил.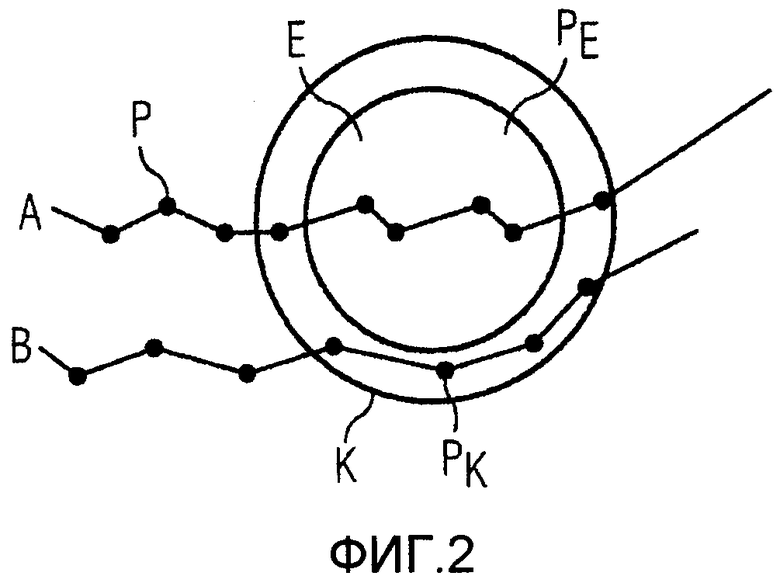
1. Способ оптимизации регистрации автомобилей, подлежащих оплате дорожного сбора, на платных дорогах дорожной сети с помощью установленного в автомобиле блока определения положения и связанного с ним находящегося вне автомобиля блока управления, причем платные дороги на электронной карте дорожной сети наложены на зоны охвата (Е), а при определении положения (PE) автомобиля в пределах зоны охвата (Е) на основе лежащих в пределах зоны охвата (Е) данных (РЕ) о положении посредством установленного в автомобиле блока определения положения определяют данные для расчета дорожного сбора и передают их блоку управления, отличающийся тем, что на электронной карте дорожной сети дополнительно предусмотрены контрольные зоны (К), которые приданы зонам охвата (Е) и по своей пространственной протяженности выдаются за приданные им зоны охвата (Е), причем при регистрации автомобилей исключительно в пределах контрольной зоны (К) и за пределами зоны охвата (Е) посредством блока определения положения передают блоку управления лежащие в пределах контрольной зоны (К) данные (РК) о положении этих автомобилей, а посредством блока управления осуществляют проверку этих данных (РК) о положении таким образом, что при повторном определении положения автомобиля исключительно в пределах контрольной зоны (К) и за пределами зоны охвата (Е) осуществляют геометрическое согласование зоны охвата (Е) на электронной карте дорожной сети.
2. Способ по п.1, отличающийся тем, что при определении положения автомобиля в пределах контрольной зоны (К) и в пределах зоны охвата (Е) посредством блока определения положения стирают данные (РК) о положении автомобиля, лежащие в пределах контрольной зоны (К) и за пределами зоны охвата (Е).
3. Способ по п.1 или 2, отличающийся тем, что посредством блока определения положения обрабатывают сигналы спутниковой навигационной системы.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| DE 4402614 A1, 03.08.1995 | |||
| DE 4344433 A1, 06.07.1995 | |||
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |
| УСТРОЙСТВО ДЛЯ ЗАПИСИ ИНФОРМАЦИИ О МАРШРУТЕ ДВИЖЕНИЯ | 1994 |
|
RU2136047C1 |
| RU 2004100315 A, 10.06.2005. | |||

