Настоящее изобретение относится к управлению ядерными реакторами.
В частности, объектом настоящего изобретения является способ регулирования рабочих параметров активной зоны ядерного реактора, работающего на воде под давлением, при этом указанный реактор содержит:
- активную зону, разделенную на верхнюю часть и нижнюю часть, и производящую тепловую мощность;
- множество групп стержней управления реактивностью активной зоны, при этом каждая из групп может занимать множество вертикально ступенчатых положений, начиная от верхнего положения;
- средства введения каждой группы стержней в активную зону вертикально сверху вниз до одного из положений введения;
- первичный контур, выполненный с возможностью обеспечения циркуляции первичной охлаждающей жидкости через активную зону;
- средства корректировки концентрации, по меньшей мере, одного соединения-поглотителя нейтронов в первичной охлаждающей жидкости;
- средства сбора данных, характеризующих условия работы активной зоны реактора.
Из документа FR-2493582 известен способ, согласно которому температуру первичной жидкости регулируют автоматически путем перемещения групп управляющих стержней в зависимости от требований к мощности турбины, от текущего значения температуры и от контрольной температуры. Осевое распределение тепловой (и нейтронной) мощности регулируют автоматически путем перемещения соответственно выбранных некоторых групп. Наконец, параметр, характеризующий способность реактора к повышению мощности, регулируется оператором, который корректирует концентрацию бора в первичной жидкости путем нагнетания в нее либо чистой воды, либо концентрированного раствора бора.
Согласно этому способу одна группа должна постоянно присутствовать в нижней части активной зоны, чтобы иметь возможность управлять осевым распределением мощности. Это требование становится невыполнимым, когда реактор работает на повышенной мощности, поскольку все группы управляющих стержней находятся в верхней части активной зоны. В этом случае операторы вынуждены отключать автоматическое регулирование температуры и осевого распределения согласно вышеуказанному способу и перейти к другому режиму, позволяющему регулировать автоматически только температуру.
Этот переход требует стабилизации сектора, следовательно, описанный выше способ регулирования активной зоны не позволяет автоматически менять мощность турбины, когда группы находятся в зоне перехода между двумя режимами регулирования. В этой зоне работа реактора в режиме «регулирования по частоте» не возможна, так как эта работа состоит в модулировании мощности турбины с целью поддержания частоты в 50 Гц в электрической сети, питаемой реактором.
В этом контексте настоящим изобретением предлагается способ регулирования активной зоны ядерного реактора, который позволяет осуществлять автоматическое и эффективное управление вышеуказанными тремя рабочими параметрами (температура первичной жидкости, осевое распределение мощности, способность повышения мощности) в более широком диапазоне мощности при работе реактора.
В этой связи объектом настоящего изобретения является способ регулирования рабочих параметров активной зоны ядерного реактора, работающего на воде под давлением, отличающийся тем, что содержит:
- этап оценки действительных значений этих рабочих параметров, по меньшей мере, в зависимости от полученных в результате измерения величин;
- этап выбора закона управления концентрацией поглощающего соединения и положениями введения групп стержней, выбираемого, по меньшей мере, между первым и вторым законами управления, отличающимися друг от друга;
- этап регулирования рабочих параметров при помощи выбранного закона управления в зависимости от заданных значений этих параметров и от действительных значений, определенных в результате оценки.
Способ может также характеризоваться одним или несколькими следующими отличительными признаками, взятыми отдельно или в любых возможных технических комбинациях:
- регулируемыми рабочими параметрами являются, по меньшей мере, средняя температура первичной охлаждающей жидкости в активной зоне, осевое распределение тепловой мощности между верхней и нижней частями активной зоны и параметр, характеризующий способность реактора к повышению мощности, при этом способность повышения мощности соответствует тепловой мощности, которая может быть произведена активной зоной, когда происходит быстрый подъем групп стержней в положение, близкое к верхнему;
- на этапе выбора выбирают первый закон, когда, по меньшей мере, одна группа стержней находится в положении введения ниже заранее определенного положения, а второй закон выбирают в противоположном случае;
- способ содержит первый этап вычисления заданных значений рабочих параметров, по меньшей мере, в зависимости от заданных значений управления;
- первый этап содержит подэтап вычисления заданного значения средней температуры первичной охлаждающей жидкости в активной зоне на основании величины, характеризующей мощность, подаваемую в электрическую сеть, питаемую реактором;
- первый этап содержит подэтап распределения групп стержней на комплект управления средней температурой первичной охлаждающей жидкости в активной зоне и на тяжелый комплект, в основном обеспечивающий управление осевым распределением мощности, при этом группы стержней тяжелого комплекта опускают на меньшую глубину, чем группы стержней комплекта управления;
- параметр, характеризующий способность реактора к повышению мощности, определяют, по меньшей мере, на основании положений введения группы или групп стержней комплекта управления, при этом первый этап содержит подэтап вычисления заданного положения группы или групп стержней комплекта управления в зависимости от заданного значения способности к повышению мощности и от измеренных величин;
- этап регулирования при помощи первого закона управления содержит:
- подэтап вычисления перемещений для группы или групп стержней комплекта управления в зависимости от заданного значения и от действительного значения средней температуры первичной охлаждающей жидкости в активной зоне, и
- подэтап изменения положения или положений введения группы или групп стержней комплекта управления в зависимости от рассчитанных перемещений с целью регулирования средней температуры первичной охлаждающей жидкости в активной зоне по заданному значению;
- этап регулирования при помощи первого закона управления содержит:
- подэтап вычисления перемещений для группы или групп стержней комплекта управления и перемещения для тяжелого комплекта в зависимости от заданного значения и от действительного значения осевого распределения тепловой мощности, и
- подэтап изменения положения или положений введения группы или групп стержней комплекта управления и/или тяжелого комплекта в зависимости от рассчитанных перемещений с целью регулирования осевого распределения тепловой мощности по заданному значению;
- этап регулирования при помощи первого закона управления содержит:
- подэтап вычисления концентрации поглощающего соединения в зависимости от заданного значения и от действительного значения параметра, характеризующего способность реактора к повышению мощности, и
- подэтап приведения концентрации поглощающего соединения в первичной охлаждающей жидкости к рассчитанной концентрации с целью регулирования параметра, характеризующего способность реактора к повышению мощности, по его заданному значению;
- этап регулирования при помощи второго закона управления содержит:
- подэтап вычисления перемещения или перемещений для группы или групп стержней комплекта управления и перемещения тяжелого комплекта в зависимости от заданного значения и от действительного значения средней температуры первичной охлаждающей жидкости в активной зоне и от заданного положения и от действительного положения группы Р1, и
- подэтап изменения положения или положений введения группы или групп стержней комплекта управления и/или тяжелого комплекта в зависимости от рассчитанных перемещений с целью регулирования средней температуры первичной охлаждающей жидкости в активной зоне по заданному значению;
- комплект управления перемещают в первую очередь для регулирования средней температуры первичной охлаждающей жидкости в активной зоне, при этом тяжелый комплект перемещают, когда комплект управления доходит до границ мертвой полосы, в центре которой находится его заданное положение;
- этап регулирования при помощи второго закона управления содержит:
- подэтап вычисления концентрации поглощающего соединения в зависимости от заданного значения и от действительного значения осевого распределения тепловой мощности, и
- подэтап корректировки концентрации поглощающего соединения в первичной охлаждающей жидкости с целью регулирования осевого распределения тепловой мощности по заданному значению;
- этап регулирования при помощи второго закона управления содержит:
- подэтап вычисления перемещения или перемещений для группы или групп стержней комплекта управления и перемещения для тяжелого комплекта в зависимости от заданного значения и от действительного значения положений введения группы или групп комплекта управления, и
- подэтап изменения положений введения группы или групп стержней комплекта управления и/или тяжелого комплекта в зависимости от рассчитанных перемещений с целью удержания группы или групп комплекта управления в мертвой полосе вокруг заданного положения введения;
- группы стержней комплекта управления последовательно опускают или поднимают, когда тепловая мощность, производимая активной зоной, меняется, при этом две последовательно опускаемые или поднимаемые группы находятся в соответствующих положениях введения, отделенных друг от друга промежутком, остающимся постоянно меньшим заранее определенного предела.
Другие отличительные признаки и преимущества настоящего изобретения будут более очевидны из нижеследующего описания, приведенного в качестве не ограничительного примера, со ссылками на прилагаемые чертежи, на которых:
фиг.1 - схема основных этапов способа в соответствии с настоящим изобретением;
фиг.2 - диаграмма процесса, детализирующая этапы двух законов управления, применяемых в способе, показанном на фиг.1;
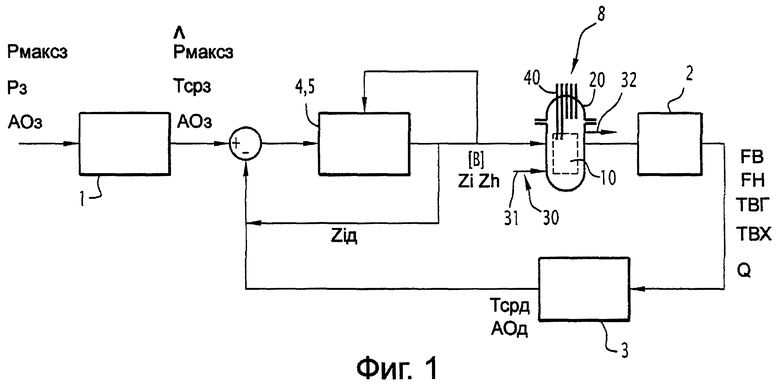
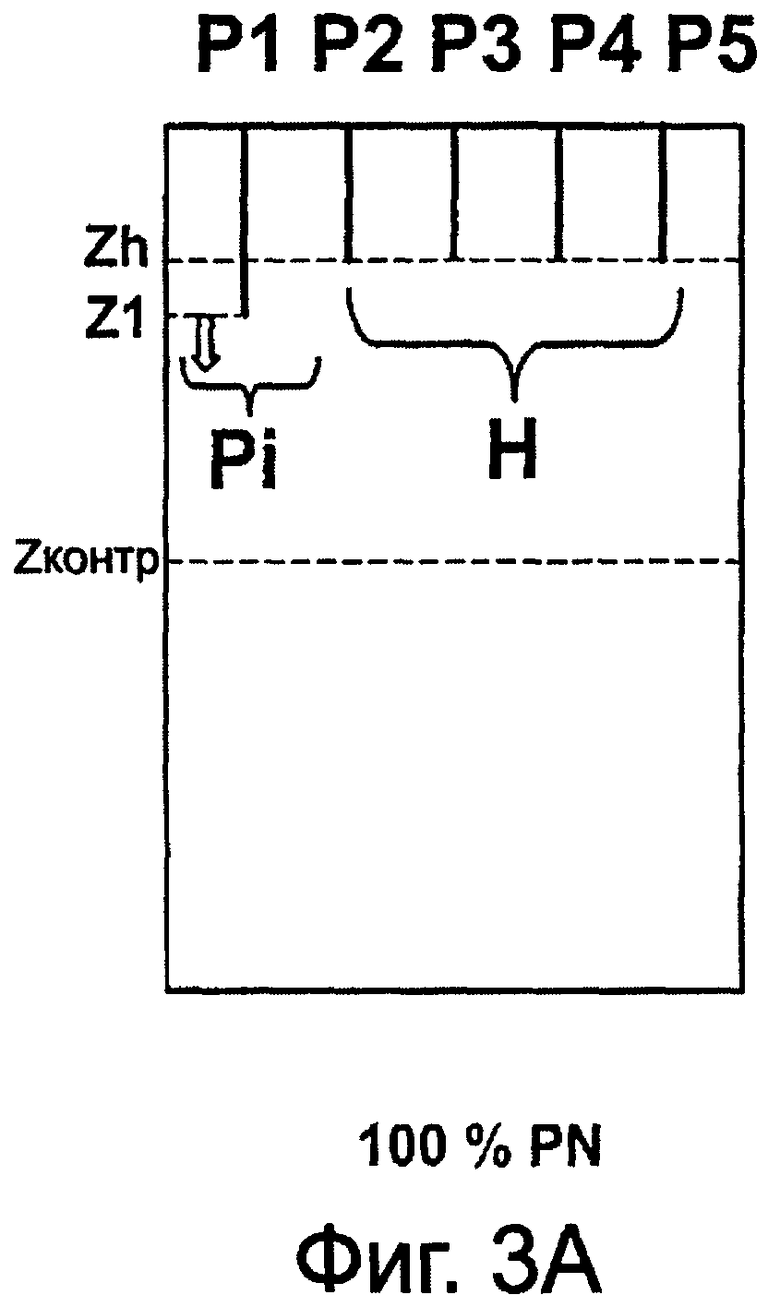
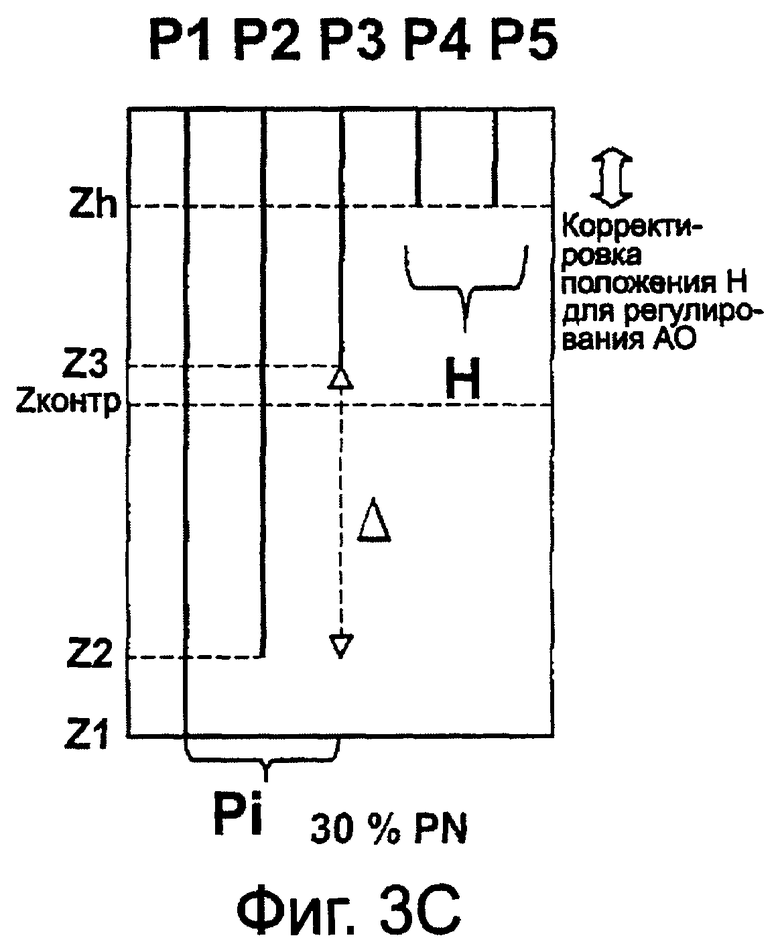
фиг.3А, 3В, 3С - схемы движений групп стержней управления в реакторе, управляемом при помощи способа, показанного на фиг.1 и 2, когда заданное значение мощности меняется от 100% номинальной мощности (фиг.3А), до 50% номинального значения (фиг.3В), затем до 30% номинального значения (фиг.3С);
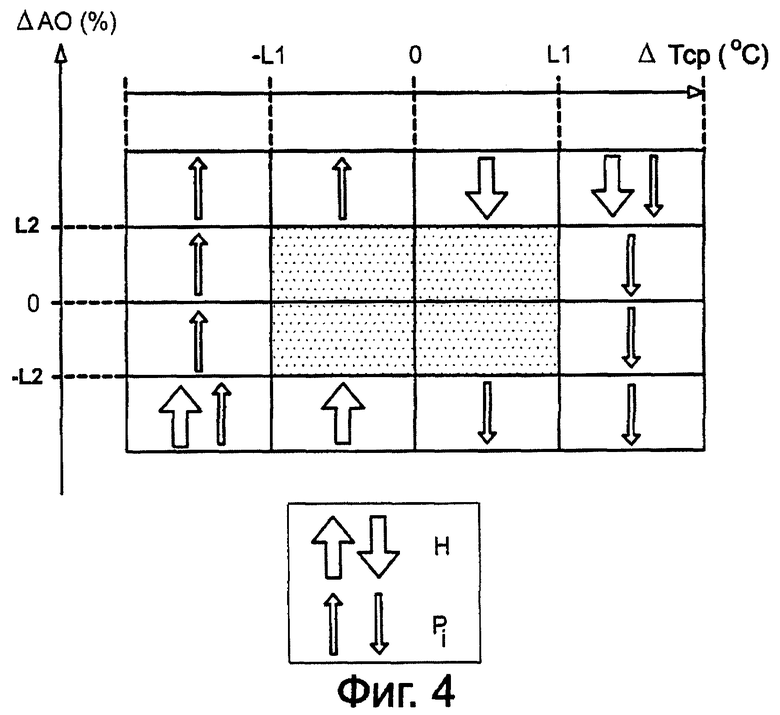
фиг.4 - логическая схема движений групп согласно способу, показанному на фиг.1 и 2, в зависимости от разности ΔТср между действительной средней температурой охлаждающей жидкости и заданной температурой (ось абсцисс, в °С) и от разности ΔАО между текущим распределением мощности и заданным распределением мощности (ось ординат, в процентах), для первого закона управления (по меньшей мере, одна группа введена в нижнюю часть активной зоны);
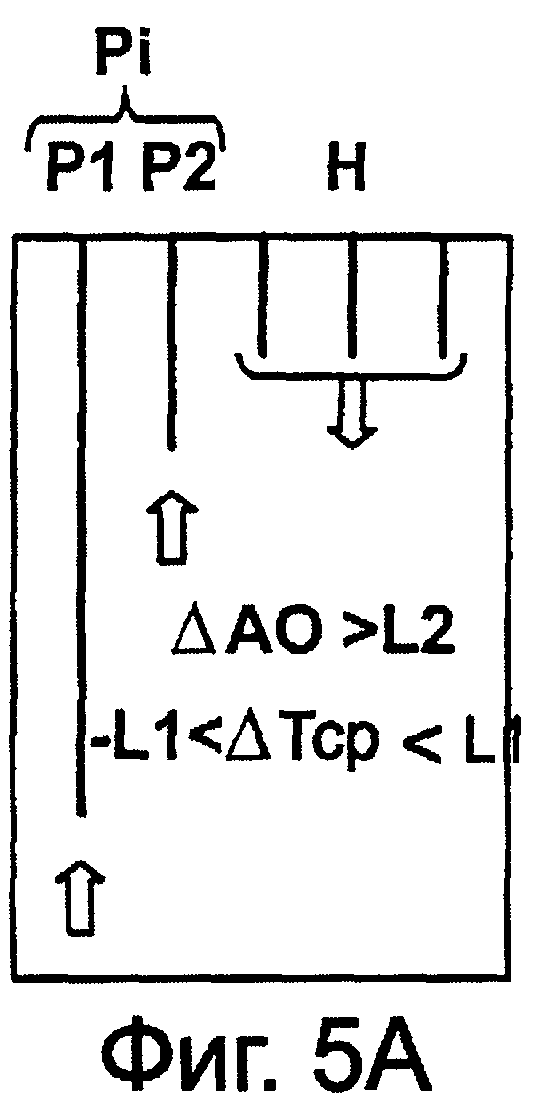
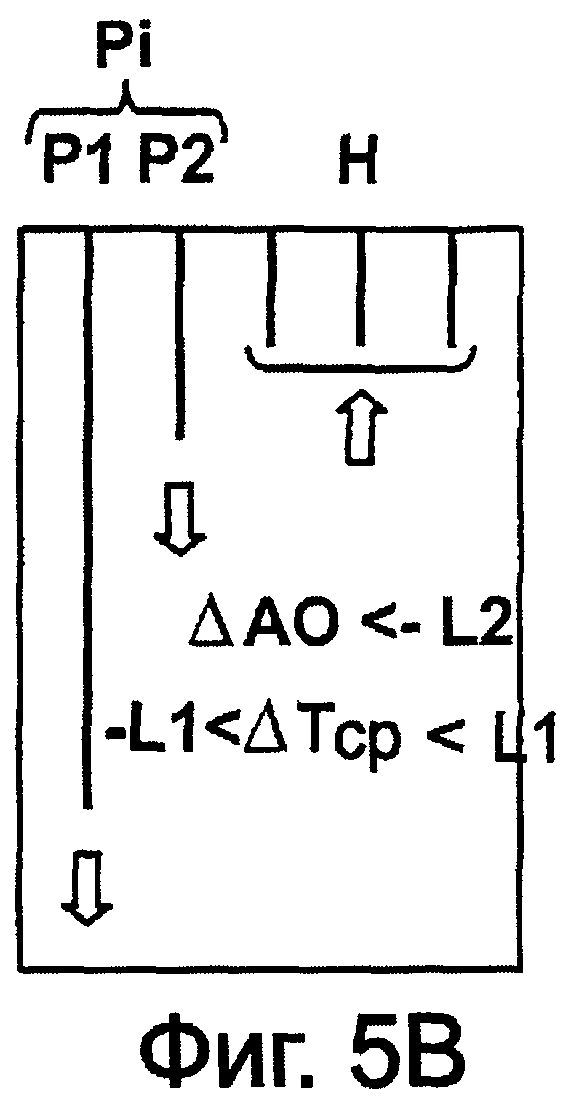
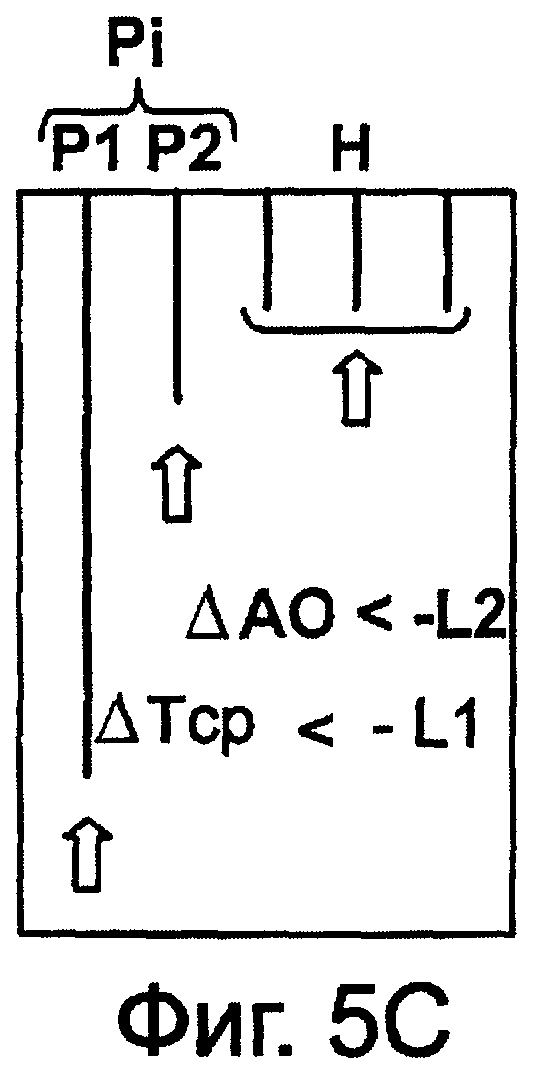
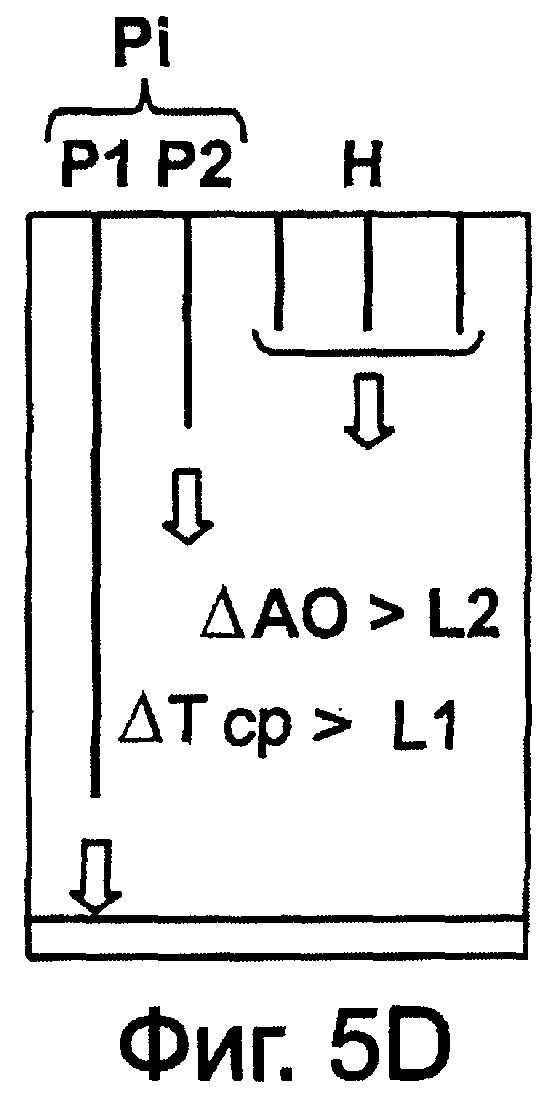
фиг.5A-5D - схемы движений групп согласно первому закону управления с целью регулирования осевого распределения мощности в разных ситуациях;
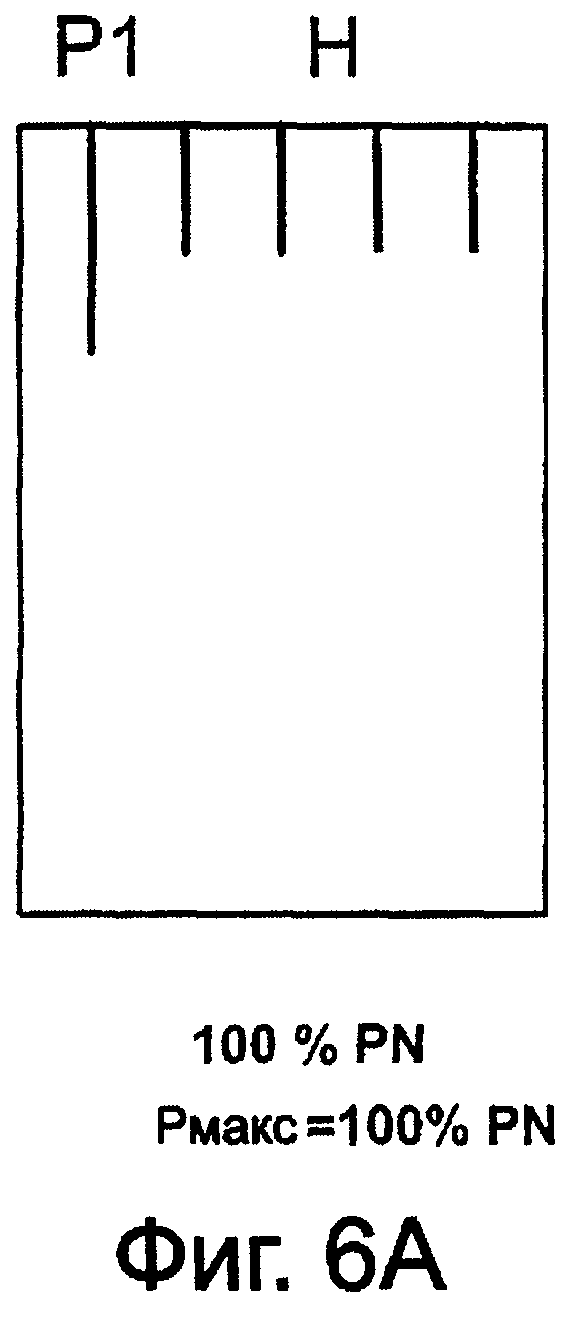
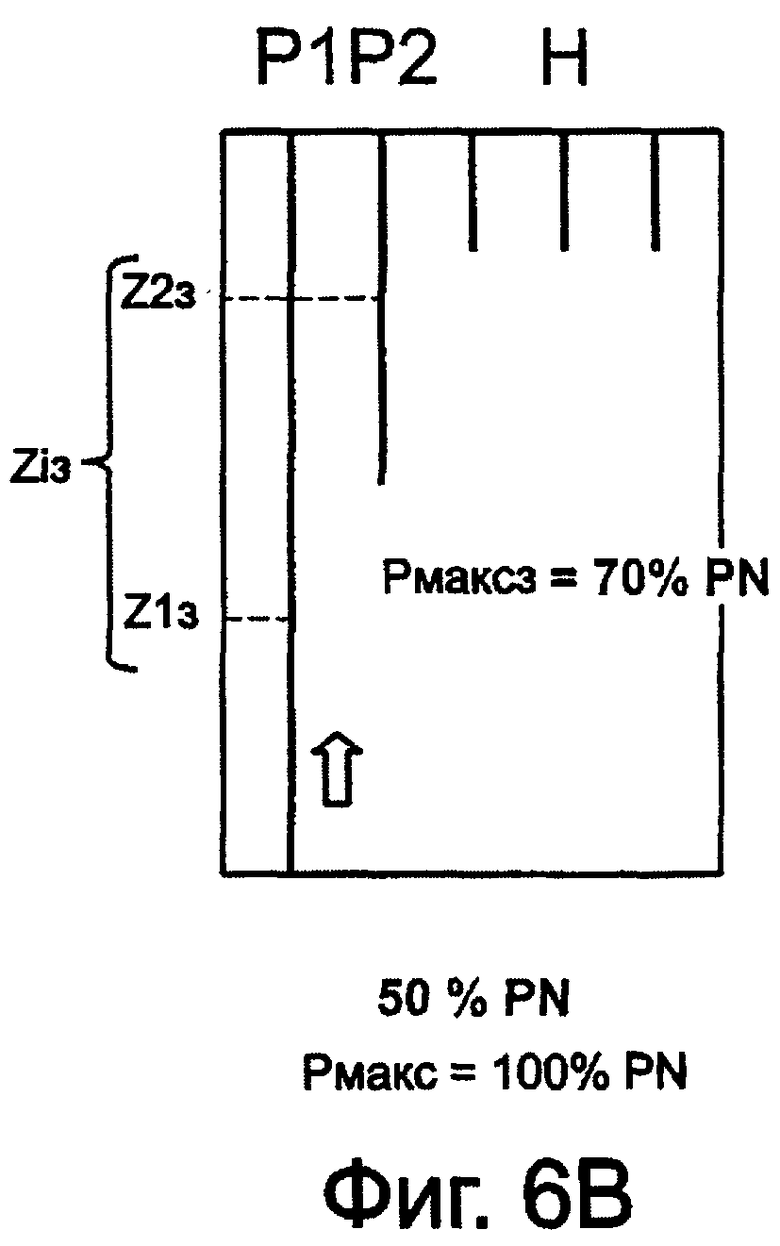
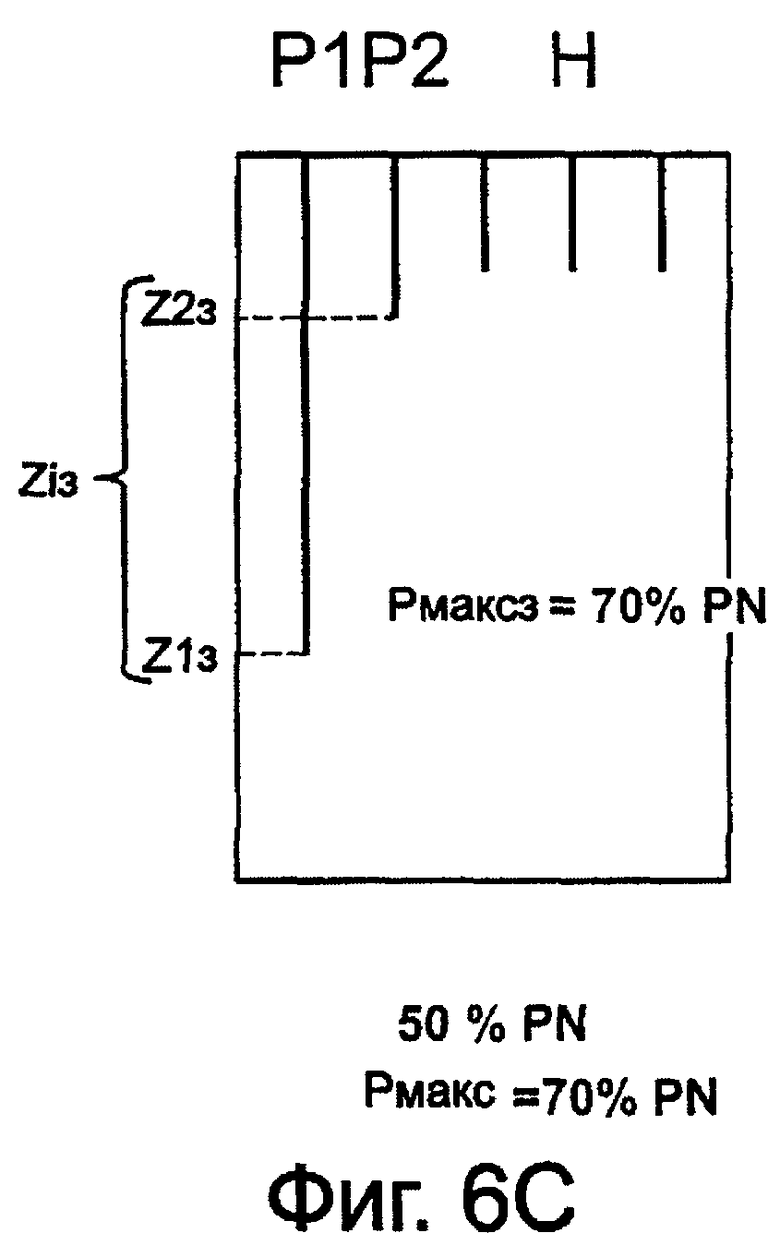
фиг.6А-6С - схемы положений групп управления с целью регулирования способности реактора к повышению мощности для 2 уровней мощности (100% и 50%) и для 2 разных значений способности повышения мощности (Рмакс=100% и 70%);
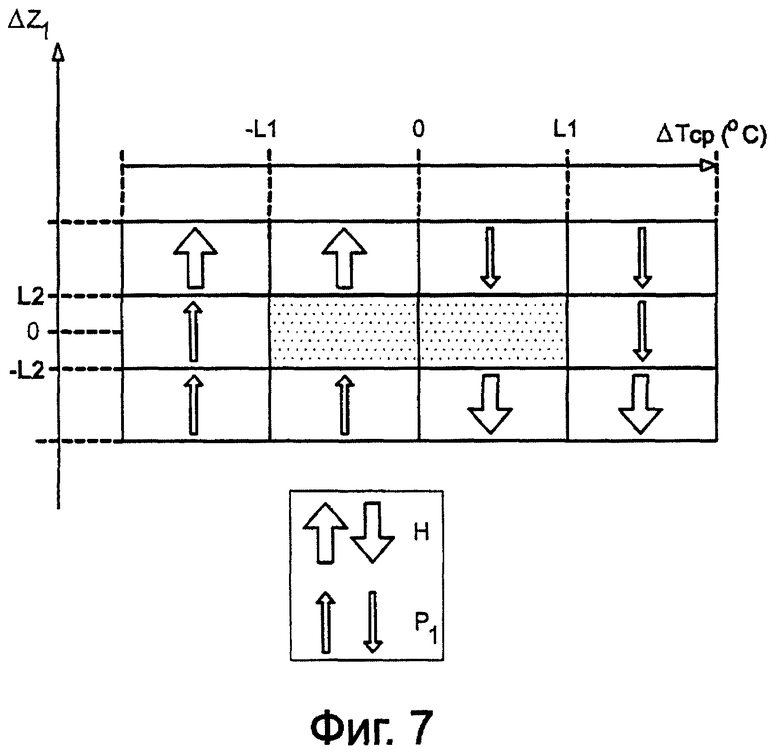
фиг.7 - логическая схема перемещений групп управления в зависимости от отклонения ΔТср между действительной средней температурой первичной охлаждающей жидкости и заданной температурой (ось абсцисс, в °С) и от отклонения ΔZ1 между действительным положением группы управления Р1 и заданным положением (ось ординат), для второго закона управления;
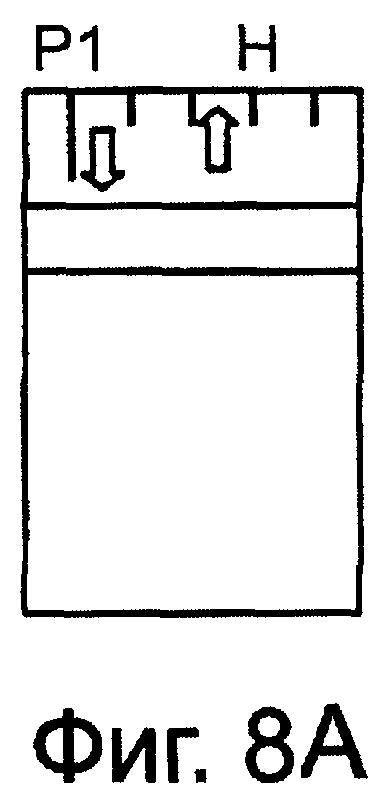
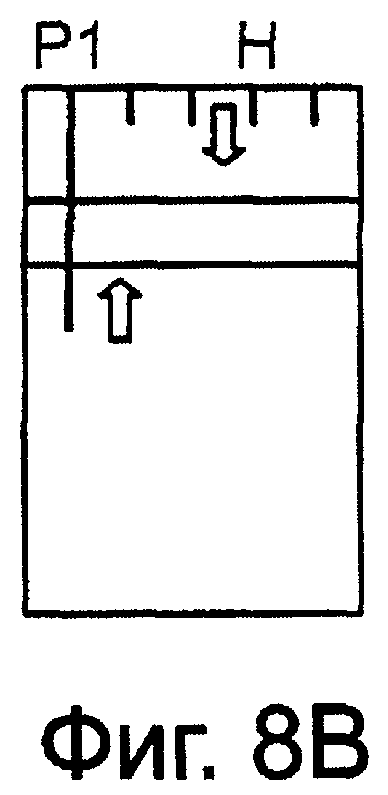
фиг.8А и 8В - схемы движений групп управления согласно второму закону управления в разных ситуациях.
Способ, схематично показанный на фиг.1 и 2, предназначен для регулирования активной зоны ядерного реактора, в частности реактора, работающего на воде под давлением.
Этот реактор 8 схематично показан на фиг.1 и содержит:
- активную зону 10, содержащую ядерные топливные сборки;
- бак 20, внутри которого находится активная зона 10 реактора;
- парогенератор (не показан);
- паровую турбину (не показана), выполненную с возможностью приведения в действие генератора переменного тока, соединенного с электрической сетью;
- первичный контур 30, соединяющий в закрытом контуре бак 20 с первичной стороной парогенератора;
- вторичный контур (не показан), соединяющий в закрытом контуре вторичную сторону парогенератора с турбиной.
Активная зона 10 производит изменяемую тепловую мощность. Она делится на верхнюю часть и нижнюю часть.
Первичный контур 30 выполнен с возможностью обеспечения циркуляции в активной зоне 10 первичной охлаждающей жидкости, в основном содержащей воду и растворенный бор, при этом жидкость нагревается при контакте с ядерными топливными сборками, затем отдает свое тепло, проходя через парогенератор. Вторичный контур выполнен с возможностью обеспечения циркуляции вторичной охлаждающей жидкости, в основном содержащей воду, при этом жидкость испаряется в парогенераторе под действием тепла, отдаваемого первичной жидкостью. Пар вращает турбину, затем конденсируется и опять направляется в парогенератор.
Генератор переменного тока подает в сеть переменную электрическую мощность в зависимости от потребностей сети. Реактором управляют таким образом, чтобы тепловая мощность, производимая активной зоной, постоянно соответствовала электрической мощности, востребованной сетью, путем изменения реактивности в активной зоне реактора.
Для этой цели реактор содержит следующие средства:
- средства для корректировки концентрации растворенного бора в первичной охлаждающей жидкости путем нагнетания раствора концентрированной борной кислоты в первичную жидкость, когда требуется повысить концентрацию, или путем нагнетания чистой воды, когда требуется снизить концентрацию;
- стержни 40 управления реактивностью активной зоны (фиг.1), каждый из которых может занимать в активной зоне 10 множество положений введения, занимаемых последовательно в вертикальном направлении, начиная от верхнего положения; управляющие стержни 40 распределены, например, на пять групп Р1-Р5, при этом стержни одной группы перемещают одновременно;
- средства для селективного введения каждой группы стержней Р1-Р5 в активную зону вертикально сверху вниз до одного из положений введения;
- средства для сбора величин FB и FH, характеризующих значения тепловой мощности, производимой в верхней и нижней частях активной зоны, температуру ТВХ первичной жидкости в холодной ветви 31 первичного контура, то есть непосредственно на входе активной зоны, температуру ТВГ первичной жидкости в горячей ветви 32 первичного контура, то есть непосредственно на выходе активной зоны, и расход Q первичной жидкости в первичном контуре.
Бор, находящийся в виде раствора в первичной жидкости, поглощает нейтроны, излучаемые ядерными топливными сборками, при этом реактивность активной зоны 10 снижается при повышении концентрации бора.
В ядерном реакторе, работающем на воде под давлением, каждая из ядерных топливных сборок содержит пучок труб большой длины, содержащих таблетки из делящегося вещества и называемых карандашами. Эти карандаши расположены вертикально, параллельно друг другу, и соединены поперечными решетками. В некоторых сборках несколько карандашей заменяют полыми трубами, называемыми направляющими трубами.
Каждый из управляющих стержней содержит пучок труб, содержащих материал-поглотитель нейтронов. Эти трубы имеют такую же длину, что и топливные сборки. Они соединены друг с другом таким образом, чтобы образовать подвижный пучок, перемещаемый в виде единого блока в вертикальном направлении. Каждый пучок выполнен с возможностью введения в направляющие трубы топливной сборки таким образом, чтобы трубы с материалом-поглотителем нейтронов чередовались в системе карандашей, содержащих топливные таблетки. При введении управляющих стержней реактивность активной зоны понижается. Чем ниже стержень, то есть чем дальше он удален от верхнего положения, тем слабее реактивность активной зоны.
Величинами, характеризующими тепловую мощность, производимую в верхней и нижней частях активной зоны, являются нейтронные потоки FB и FH в верхней и нижней частях активной зоны, измеряемые датчиками, установленными на разных высотах активной зоны.
Показанный на фиг.1 способ регулирования позволяет автоматически регулировать несколько рабочих параметров активной зоны реактора в зависимости от заданных значений управления, устанавливаемых оператором, управляющим реактором, или передаваемых извне, например, через электрическую сеть питания.
Регулируемыми параметрами являются, по меньшей мере, средняя температура Тср первичной охлаждающей жидкости в активной зоне, осевое распределение АО тепловой мощности между верхней и нижней частями активной зоны и параметр  , характеризующий способность Рмакс реактора к повышению мощности.
, характеризующий способность Рмакс реактора к повышению мощности.
Концентрация бора в первичной жидкости и положения групп стержней Р1-Р5 изменяются автоматически для регулирования рабочих параметров, без вмешательства операторов или при очень ограниченном вмешательстве операторов, например, для изменения заданных значений управления или для подтверждения команд на перемещение групп стержней, или команд на изменение концентрации бора, предусмотренных.
Способность Рмакс реактора к повышению мощности соответствует тепловой мощности, которая может быть произведена активной зоной, когда группы стержней P1-Р5 быстро поднимаются вверх в активной зоне в положение, близкое к верхнему. Осевое распределение мощности АО выражается следующим уравнением:

где FB и FH - нейтронные потоки соответственно в верхней и нижней частях активной зоны.
Температура Тср выражается следующим уравнением:

Заданными значениями управления активной зоной являются: величина Рз, характеризующая вторичную мощность, производимую турбиной, заданное значение способности Рмаксз реактора к повышению мощности и заданное значение осевого распределения АОз между верхней и нижней частями активной зоны. Величиной, характеризующей вторичную мощность Рз, является, например, измерение тепловой мощности, производимой вторичным контуром реактора. В варианте в качестве заданного значения можно использовать заданную электрическую мощность, подаваемую в сеть генератором переменного тока.
Как показано на фиг.1, способ регулирования содержит:
- первый этап 1 вычисления заданных значений (Тсрз, АОз,  ) рабочих параметров в зависимости от заданных значений управления (Рз, АОз, Рмаксз), установленных оператором, и от действительной первичной тепловой мощности (Рпд), подаваемой активной зоной на первичный контур;
) рабочих параметров в зависимости от заданных значений управления (Рз, АОз, Рмаксз), установленных оператором, и от действительной первичной тепловой мощности (Рпд), подаваемой активной зоной на первичный контур;
- второй этап 2 сбора действительных значений величин (FB, FH), характеризующих тепловую мощность, производимую в верхней и нижней частях активной зоны, температуры первичной охлаждающей жидкости в горячей и холодной ветвях (ТВГ, ТВХ) и расход первичной жидкости (Q);
- третий этап 3 оценки действительных значений (Тсрд, АОд,  ) рабочих параметров, по меньшей мере, в зависимости от полученных величин (FB, FH, ТВГ, ТВХ, Q);
) рабочих параметров, по меньшей мере, в зависимости от полученных величин (FB, FH, ТВГ, ТВХ, Q);
- четвертый этап 4 выбора закона управления концентрацией бора [В] и положениями введения Z1-Z5 групп стержней Р1-Р5, выбираемого между первым и вторым законами управления, отличающимися друг от друга;
- пятый этап 5 регулирования рабочих параметров при помощи выбранного закона управления, в зависимости от заданных значений (Тсрз, АОз, ) для вышеуказанных параметров и от действительных значений (Тсрд, АОд, ), определенных в результате оценки.
Более детально эти этапы показаны на фиг.2.
Первый этап содержит подэтапы 11-13, показанные на фиг.2.
На подэтапе 11 заданное значение средней температуры Тсрз первичной охлаждающей жидкости в активной зоне вычисляют в зависимости от заданного значения мощности Рз, установленного оператором. Для этого используют, например, заранее рассчитанную кривую, из которой напрямую получают значение Тсрз в зависимости от Рз.
На подэтапе 12 группы стержней Р1-Р5 распределяют на комплект Pi управления средней температурой Тср первичной охлаждающей жидкости в активной зоне и тяжелый комплект Н, вводимый лишь частично и обеспечивающий в основном управление осевым распределением мощности АО.
Как показано на фиг.3А-3С, группы комплекта управления Pi выполнены с возможностью индивидуального координированного перемещения, в частности, с целью управления температурой Тср. Их перемещают до положений введения, которые могут отличаться друг от друга. И, наоборот, группы тяжелого комплекта Н перемещают вместе до положения введения, одинакового для всех групп комплекта. Назначение пучков, образующих группы, может меняться, чтобы иметь возможность сводить к минимуму чрезмерное истощение, вызываемое группой Р1 при номинальной работе, а также распределять число шагов по всей совокупности пучков. Тяжелый комплект Н всегда размещают в верхней половине активной зоны, то есть, иначе говоря, его положение введения всегда меньше половины высоты активной зоны.
Когда реактор работает близко к своей номинальной мощности, комплект управления Pi содержит только одну группу (группа Р1 на фиг.3А), и тяжелый комплект Н содержит остальные четыре группы.
При низкой мощности реактора, наоборот, комплект управления Р1 содержит несколько групп (3 группы на фиг.3С), и тяжелый комплект Н содержит менее четырех групп.
Далее в тексте описания буквенной позицией Zi будут коллективно обозначаться положения Z1, Z2… разных групп комплекта Pi, и позицией Zh будет обозначаться единое положение групп тяжелого комплекта Н.
Заданное значение параметра , характеризующего способность реактора к повышению мощности Рмакс, вычисляют на подэтапе 13.
Параметр соответствует вектору, координатами которого являются положения введени я Zi групп стержней комплекта Pi. Его определяют при помощи вычислительной программы на основании Рмакс и действительной первичной мощности Рпд. Действительную первичную мощность Рпд определяют при помощи следующей формулы:

где С - теплоемкость первичной жидкости.
Вычислительная программа рассчитывает изменение первичной мощности, которое можно получить путем последовательного перемещения групп комплекта Pi вверх или вниз, исходя из действительной ситуации в активной зоне (действительная концентрация бора в первичной жидкости, действительное положение групп, согласно процедуре последовательного введения, которая подробно будет рассмотрена ниже). Зная действительную первичную мощность Рпд и кривую изменения первичной мощности в зависимости от положений Zi, вектор положений Zi можно связать с значением способности повышения мощности Рмакс.
Таким образом, заданное значение соответствует заданному значению Ziз положений введения групп стержней комплекта Pi. Значения Ziз являются теоретическими положениями групп стержней комплекта Pi, позволяющими одновременно получать действительную первичную мощность, равную Рпд, и способность реактора к повышению мощности, равную заданному значению Рмаксз.
Ниже следует описание процедуры последовательного введения групп комплекта Pi.
Как показано на фиг.3А-3С, заданные значения положения определяют, предваряя последовательное введение групп комплекта Pi во время изменения мощности. Так, для действительной первичной мощности Рпд, равной 100% номинальной мощности (фиг.3А), комплект Pi содержит только группу Р1, и группе Р1 соответствует заданное положение Z1з меньшего введения, при этом четыре другие группы Р2-Р5 находятся в заданном верхнем положении и образуют тяжелую подгруппу Н. Когда первичная мощность Рпд является низкой, заданное положение Z1з группы Р1 выбирают более низким. Если первичная мощность Рпд ниже одного порогового значения (например, 80%), интервал между заданным положением группы Р1 и заданным положением группы Р2 превышает максимальный предел (например, 1/2 высоты активной зоны), и группу Р2 переводят из комплекта Н в комплект управления Pi. Заданные положения обеих групп вычисляют таким образом, чтобы получить между ними заранее определенный постоянный интервал введения Δ (в вышеуказанном примере - 50% от высоты активной зоны, предпочтительно от 40% до 60% высоты активной зоны) (см. фиг.3В, где показаны положения групп для заданного значения мощности в 50% от номинальной мощности). Когда первичная мощность Рпд оказывается меньше другого порогового значения (например, 50%), интервал между заданным положением группы Р2 и заданным положением группы Р3 превышает максимальный предел (1/2 высоты активной зоны), и группу Р3 переводят из комплекта Н в комплект управления Pi (фиг.3С, где показаны положения групп для заданного значения мощности в 30%). Заданные положения групп Р2 и Р3 рассчитывают таким образом, чтобы поддерживать между ними заранее определенный интервал введения Δ. Параллельно, для группы Р1 устанавливают заданное положение, соответствующее максимальному введению, таким образом, чтобы интервал между заданными положениями группы Р1 и группы Р2 уменьшился.
На втором этапе 2 измеряют нейтронные потоки FB и FH в верхней и нижней частях активной зоны, температуры ТВГ и ТВХ первичной охлаждающей жидкости в горячей и холодной ветвях первичного контура и расход Q первичной жидкости в первичном контуре. Эти величины измеряют при помощи измерительной системы реактора или получают из системы управления реактором.
На третьем этапе 3 оценивают действительные значения Тсрд, АОд, рабочих параметров Тср, АО и . Действительное значение осевого распределения мощности АО вычисляют при помощи вышеупомянутой формулы (1) в зависимости от значений нейтронных потоков FB и FH, измеренных на втором этапе. Действительное значение Тсрд температуры Тср вычисляют при помощи вышеупомянутой формулы (2) в зависимости от значений температур ТВГ и ТВХ, полученных на втором этапе. Действительное значение параметра, характеризующего Рмакс, вычисляют на основании действительных положений введения Ziд групп стержней комплекта управления Pi и действительной первичной мощности Рпд. Положения Ziд получают, например, из вычислительной машины, управляющей средствами введения групп стержней. Мощность Рпд вычисляют при помощи вышеупомянутой формулы (3) в зависимости от значений температур ТВГ и ТВХ и от значения первичного расхода Q, измеренных на втором этапе.
На четвертом этапе 4 выбирают первый закон управления, когда, по меньшей мере, одна группа стержней находится в положении введения, меньшем заранее определенного положения Zконтр, а второй закон управления выбирают в противном случае.
Таким образом, второй закон используют, в частности, когда все группы Р1-Р5 находятся в верхней части реактора, то есть когда реактор работает с мощностью, близкой к номинальной мощности.
Первый закон управления используют, когда, по меньшей мере, одна из групп находится в нижней части реактора, то есть, когда реактор работает с мощностью, например, ниже 90% от номинальной мощности, или во время работы на частичной мощности с группами стержней в верхней части активной зоны.
Этап 5 регулирования согласно способу, когда применяется первый закон управления, представлен в левой части фиг.2.
Этап регулирования 5 при помощи первого закона управления содержит модуль 51 регулирования температуры Тср, модуль 52 регулирования осевого распределения мощности АО и модуль 53 регулирования способности повышения мощности Рмакс.
Модуль 51 регулирования Тср подразделяется на:
- подэтап вычисления перемещений dZi для всех групп стержней комплекта управления Pi в зависимости от заданного значения Тсрз и от действительного значения Тсрд средней температуры первичной охлаждающей жидкости в активной зоне, и
- подэтап изменения положений введения Zi всех групп стержней комплекта управления Pi в зависимости от перемещений dZi, рассчитанных на предыдущем подэтапе, с целью регулирования средней температуры Тср первичной охлаждающей жидкости в активной зоне по заданному значению Тсрз.
Модуль 52 регулирования распределения мощности АО подразделяется на:
- подэтап вычисления перемещения dZh для тяжелого комплекта Н и перемещений dZi для групп стержней комплекта управления Pi в зависимости, по меньшей мере, от заданного значения АОз и от действительного значения АОд осевого распределения тепловой мощности, и
- подэтап изменения положений введения Zi группы или групп комплекта управления Pi и/или тяжелого комплекта Н в зависимости от рассчитанных перемещений dZi и dZh с целью регулирования осевого распределения тепловой мощности АО по заданному значению АОз.
Как было указано выше, отклонение между действительным значением Тсрд и заданным значением Тсрз средней температуры охлаждающей жидкости используют при расчете перемещений комплектов Pi и Н.
Кроме того, комплект управления Pi и тяжелый комплект Н предпочтительно перемещают в противоположных направлениях для регулирования осевого распределения тепловой мощности АО таким образом, чтобы не влиять на температуру первичной жидкости Тср. Это происходит, в частности, когда Тср находится в мертвой полосе вокруг заданного значения Тсрз.
На фиг.4 показана логическая схема перемещения групп в различных ситуациях в зависимости от отклонения ΔТср между действительной температурой Тсрд и заданной температурой Тсрз и от отклонения между действительным осевым распределением мощности АОд и заданным значением АОз.
Заштрихованная зона обозначает область, в которой и АО, и Тср находятся в мертвой полосе вокруг своих заданных значений соответственно, при этом модули регулирования температуры Тср и осевого распределения мощности АО не предусматривают в этом случае никаких воздействий на группы управления.
На фиг.4 видно, что, когда АО находится в своей мертвой полосе, а Тср выходит из своей мертвой полосы, комплект управления Pi перемещают при помощи модуля регулирования Тср в направлении, позволяющем вернуть Тср в ее мертвую полосу.
Когда, наоборот, Тср находится в своей мертвой полосе, а АО вышло из своей мертвой полосы, модуль регулирования распределения мощности подает команду на перемещение либо комплекта Pi, либо тяжелого комплекта Н, в зависимости от знака отклонения температуры. Например, если ΔAO>L2 и Тср имеет положительный знак при ΔАО=АОд-АОз и ΔТср=Тсрд-Тсрз, комплект Н перемещают вниз. В результате этого осевое распределение мощности возвращают к заданному значению, а также снижают Тср, таким образом, чтобы ΔТср стало отрицательным. Получают ситуацию, когда ΔAO>L2, а ΔТср - отрицательное. В этом случае модуль регулирования распределения мощности перемещает комплект Pi вверх, как показано на фиг.5А, что позволяет компенсировать перемещение комплекта Н вниз в связи с регулированием температурой. Ситуация является такой же, когда ΔАО имеет отрицательный знак (см. самую нижнюю линию на фиг.4 и фиг.5В).
Когда же АО и Тср выходят из своих соответствующих мертвых полос одновременно, стратегия регулирования АО меняется. Комплект Pi перемещают в зависимости от знака температурного отклонения ΔТср при помощи модуля регулирования температуры. Тяжелый комплект Н перемещается модулем регулирования распределения мощности таким образом, чтобы вернуть АО к заданному значению, однако это перемещение блокируется, если оно происходит в направлении увеличения изменения Тср по сравнению с заданным значением. Таким образом, когда ΔAO>L2 и ΔТср>-L1, комплект Pi перемещают вверх для увеличения Тср. Тяжелый комплект Н следовало бы переместить вниз для приведения АО к заданному значению, но это перемещение блокируется, так как оно может привести к снижению Тср и, следовательно, к удалению температуры от ее заданного значения. Поэтому в данном случае тяжелый комплект Н не перемещают. Перемещение тяжелого комплекта Н отменяют также, когда ΔAO<-L2 и ΔТср>L1. Перемещение тяжелого комплекта Н, наоборот, не отменяют в других случаях, то есть, когда ΔAO<-L2 и ΔТср<-L1 (фиг.5С) и когда ΔAO>L2 и ΔТср>L1 (фиг.5D).
Модуль 53 регулирования способности реактора к повышению мощности Рмакс подразделяется на:
- подэтап вычисления концентрации бора [В] в первичной жидкости в зависимости от заданного значения и от действительного значения параметра, характеризующего Рмакс, и
- подэтап доведения концентрации бора [В] в первичной охлаждающей жидкости до расчетной концентрации с целью регулирования параметра по заданному значению .
Действительно, когда находится ниже мертвой полосы с центром вокруг заданного значения (группы комплекта Pi введены лишь незначительно), модуль регулирования Рмакс подает команду на разбавление первичной жидкости путем нагнетания не содержащей бор воды. Концентрация бора снижается, что приводит к повышению реактивности в активной зоне и, следовательно, к повышению температуры Тcр первичной жидкости. В этом случае модуль регулирования Тср перемещает комплект управления Pi вниз для понижения Тcр, как было указано выше, таким образом, чтобы , соответствующий вектору положений введения Zi, вернулся в свою мертвую полосу.
Если же находится выше своей мертвой полосы (группы комплекта Pi введены слишком низко), модуль регулирования Рмакс подает команду на нагнетание концентрированного бора в первичную жидкость. Реактивность активной зоны снижается, что приводит к понижению Тср и к перемещению комплекта управления Pi вверх при помощи модуля регулирования Тср.
В варианте выполнения, чтобы свести к минимуму жидкие отходы, модуль 53 регулирования Рмакс частично или полностью блокируется во время переходов мощности. Так, в примере, показанном на фиг.6А-6С, модуль 53 не задействован во время фазы уменьшения мощности и на нижнем плато, пока  .
.
На фиг.6А-6С показана последовательность работы реактора, когда он переходит от действительной первичной тепловой мощности, равной 100% номинальной мощности PN (фиг.6А), к 50% от номинальной мощности PN (фиг.6В), затем держится на плато при 50% от номинальной мощности PN (фиг.6С). Заданное значение Рмаксз устанавливают в 70% от номинальной мощности PN в течение всего цикла.
При 100% номинальной мощности (фиг.6А) все группы находятся в верхней части активной зоны. В данном случае Рмакс соответствует 100% номинальной мощности, что превышает заданное значение Рмаксз. Модуль регулирования Рмакс не задействован.
Когда реактор доходит до 50% от номинальной мощности (фиг.6В), группы Р1 и Р2, образующие комплект Pi, вводят в активную зону. В этом случае Рмакс соответствует 100% номинальной мощности, поскольку реактор можно быстро вернуть к номинальной мощности, вернув группы Р1 и Р2 в верхнее положение. Модуль регулирования Рмакс не задействован, так как действительное значение Рмакс превышает заданное значение Рмаксз. В этом случае действительное значение параметра соответствует положениям Ziд большего введения, чем заданные положения Ziз, соответствующие заданному значению параметра .
Во время плато при 50% от номинальной мощности внутри карандашей, образующих топливные сборки, в результате ядерных реакций происходит образование ксенона, что приводит к снижению реактивности активной зоны и к понижению температуры Тср. В этом случае модуль регулирования Тср подает команду на перемещение комплекта управления Pi вверх, чтобы уравновешивать влияние ксенона и поддерживать Тср постоянной. Тепловая мощность, производимая активной зоной, тоже остается постоянной. С учетом этого подъем комплекта Pi снижает Рмакс, так как уже невозможно вернуться к 100% номинальной мощности, подняв группы Р1 и Р2 в верхнее положение.
Когда комплект Pi достигает заданного положения Ziз, соответствующего заданному значению , модуль регулирования Рмакс подает команду на разбавление первичной жидкости, таким образом, чтобы остановить подъем комплекта Pi под действием образования ксенона (фиг.6С). Заданное положение Ziз и заданное значение вычисляют, как было указано выше, в зависимости от заданного значения Рмаксз (в данном случае 70% от номинальной мощности) и от первичной мощности Рпд (в данном случае 50% от номинальной мощности).
Этап 5 регулирования согласно способу, когда применяют второй закон управления, детально показан в правой части фиг.2.
Как уже уточнялось выше, второй закон в данном случае применяют, когда все группы Р1-Р5 находятся в верхней части реактора, то есть, когда реактор работает с мощностью, близкой к номинальной мощности, или во время работы с частичной мощностью при извлеченных пучках. Следовательно, комплект управления Pi содержит только группу Р1, а тяжелый комплект Н содержит четыре другие группы. В этом случае 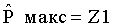 . Заданное значение по сути дела является заданным положением для Р1, обозначенным Ziз в дальнейшем описании. Точно так же, действительное значение параметра по сути дела является действительным положением Z1д группы Р1.
. Заданное значение по сути дела является заданным положением для Р1, обозначенным Ziз в дальнейшем описании. Точно так же, действительное значение параметра по сути дела является действительным положением Z1д группы Р1.
Как и в случае первого закона управления, этап регулирования содержит модуль 54 регулирования температуры Тср, модуль 55 регулирования осевого распределения мощности АО и модуль 56 регулирования способности повышения мощности Рмакс.
Модуль 54 регулирования Тср содержит:
- подэтап вычисления перемещения dZ1 для группы стержней Р1 (образующей комплект управления Pi) и перемещения dZh для тяжелого комплекта Н в зависимости от заданного значения Тсрз, от действительного значения Тсрд средней температуры первичной охлаждающей жидкости в активной зоне и заданных положений Zi3 и действительного положения Z1д группы Р1, и
- подэтап изменения положений введения группы Р1 и/или тяжелого комплекта Н в зависимости от расчетных перемещений dZ1 и dZh с целью регулирования средней температуры Тср первичной охлаждающей жидкости в активной зоне по заданному значению Тсрз.
В первую очередь перемещают группу Р1 для регулирования Тср, в пределах мертвой полосы с центром вокруг заданного положения Z1з. Тяжелый комплект Н перемещают, когда группа Р1 доходит до границ мертвой полосы.
Эта стратегия регулирования вытекает из фиг.7, на которой показана логическая схема движения групп в зависимости от отклонения ΔТср между действительным значением Тср и заданным значением Тсрз (ось абсцисс) и в зависимости от отклонения AZ1 между действительным положением Z1д группы Р1 и заданным положением Z1з (ось ординат), при ΔТср=Тсрд-Тсрз и ΔZ1=Z1д-Z1з.
Из центральной полосы схемы видно, что, когда группа Р1 находится в центральной мертвой полосе с центром вокруг заданного значения Z1з, и ΔТср<-L1, группа Р1 перемещается вверх. Когда ΔZ1 достигает L2, тяжелый комплект Н перемещается вверх.
Точно так же, когда Р1 находится в мертвой полосе с центром вокруг заданного значения Z1з и когда ΔТср>L1, группа Р1 перемещается вниз. Когда ΔZ1 достигает -L2, тяжелый комплект Н перемещается вниз.
Модуль 55 регулирования осевого распределения мощности содержит:
- подэтап вычисления концентрации соединения-поглотителя [В] в зависимости от заданного значения АОс и от действительного значения АОд осевого распределения тепловой мощности, и
- подэтап доведения концентрации соединения-поглотителя [В] в первичной охлаждающей жидкости до расчетной концентрации с целью регулирования осевого распределения тепловой мощности АО по заданному значению АОз.
В частности, когда АО превышает заданное значение АОз, модуль регулирования АО подает команду на разбавление первичной охлаждающей жидкости путем нагнетания не содержащей бор воды. В результате этого разбавления повышается реактивность активной зоны и, следовательно, температура Тср, что приводит в действие модуль регулирования Тср. Последний подает команду на введение группы Р1 и/или группы Н, как было указано выше, что приводит к снижению тепловой мощности в верхней части реактора и, следовательно, к уменьшению АО.
Когда же, наоборот, АО меньше заданного значения АОз, модуль регулирования АО подает команду на нагнетание концентрированного бора в первичную жидкость. В результате этого нагнетания уменьшается реактивность активной зоны и, следовательно, снижается Тср, что приводит к подъему группы Р1 и/или группы Н при помощи модуля регулирования Тср. Тепловая мощность в верхней части реактора повышается, что приводит к увеличению АО.
Модуль 56 регулирования Рмакс содержит:
- подэтап вычисления перемещения dZ1 для группы Р1 (которая образует комплект управления Pi) и перемещения dZh для тяжелого комплекта Н в зависимости, по меньшей мере, от заданного значения Z1з и от действительного значения Z1д положения введения группы Р1, и
- подэтап изменения положений введения группы Р1 и/или тяжелого комплекта Н в зависимости от расчетных перемещений dZ1 и dZh с целью удержания группы или групп комплекта управления Р1 в мертвой полосе вокруг заданного положения введения Z1з.
Регулирование Тср при помощи второго закона управления приводит к тому, что группа Р1 остается в своей мертвой полосе, поскольку, как было указано выше, Н перемещается, когда Р1 доходит до границы своей мертвой полосы. Поэтому к регулированию Рмакс прибегают очень редко. Это регулирование будет подробно описано ниже.
На фиг.7 показано, что, когда Тср находится в своей мертвой полосе и Z1 выходит из своей мертвой полосы, модуль регулирования Рмакс подает команду на перемещение либо группы Р1, либо тяжелого комплекта Н в зависимости от знака температурного отклонения ΔТср. Например, если AZ1>L2 и ΔТср положительное, группа Р1 перемещается вниз. В результате этого группа Р1 возвращается в заданное положение, а также понижается Тср, при этом ΔТср становится отрицательным. Модуль регулирования Рмакс перемещает в этом случае тяжелый комплект Н вниз, что компенсирует перемещение комплекта Р1 вниз в связи с регулированием температуры и осевого распределения мощности (фиг.8А). Ситуация является такой же, когда ΔZ1 имеет отрицательный знак (см. самую нижнюю линию на фиг.7 и на фиг.8В).
Таким образом, когда средняя температура Тср находится в своей мертвой полосе вокруг заданного значения Тсрз, комплект управления Pi и тяжелый комплект Н перемещаются в противоположных направлениях, чтобы удерживать комплект управления в своей мертвой полосе вокруг заданного положения Ziз.
Следует отметить, что отклонение между действительным значением Тсрд и заданным значением Тсрз средней температуры принимается во внимание при расчете перемещений комплектов Pi и Н.
Описанный выше способ позволяет управлять переходами мощности. Во время перехода мощности мощность турбины постепенно переходит от значения V1 к значению V2.
В случае, когда V1>V2, тепловая мощность, удаляемая вторичным контуром, уменьшается и сначала становится меньше тепловой мощности, производимой активной зоной реактора. Температура Тср первичной жидкости в результате повышается, что приводит в действие модуль регулирования Тср 51 или 54, в зависимости от случая. Этот модуль подает команду на перемещение групп управляющих стержней Р1-Р5 вниз, что позволяет вернуть Тср к заданному значению, сохраняя при этом тепловую мощность, производимую активной зоной, на уровне, совместимом с мощностью, удаляемой вторичным контуром.
Применение двух отличных друг от друга законов управления позволяет эффективно и полностью автоматически производить регулирование трех рабочих параметров реактора (температура Тср первичной жидкости, осевое распределение тепловой мощности АО, параметр , характеризующий способность реактора к повышению мощности Рмакс), независимо от заданного значения мощности, и, в частности, до 100% номинальной мощности реактора.
Возможность выбора закона управления в зависимости от положения групп управляющих стержней позволяет использовать два разных закона, первый из которых соответствует случаю, когда, по меньшей мере, одна группа введена в нижнюю часть активной зоны, а второй соответствует случаю, когда все группы находятся в верхней части активной зоны.
Кроме того, описанный выше частный вариант выполнения имеет также другие преимущества, которые будут указаны далее. Вместе с тем, необходимо отметить, что связанные с ним отличительные признаки носят факультативный характер.
В обоих законах регулирование Тср осуществляют, распределяя группы управления на комплект управления и тяжелый комплект, при этом группы комплекта управления вводят последовательно для регулирования Тср.
В обоих законах заданное значение Рмакс выражается в заданном положении Ziз для комплекта управления Pi, что обеспечивает автоматическое управление этим параметром.
В первом законе осевое распределение мощности АО регулируют по его заданному значению путем перемещения групп стержней Р1-Р5. Когда температура Тср находится в мертвой полосе вокруг своей заданной величины Тсрз, комплекты Pi и Н перемещают в противоположных направлениях. Кроме того, параметр , характеризующий способность реактора к повышению мощности Рмакс, регулируют по его заданному значению , меняя концентрацию бора в первичной жидкости. Этот способ регулирования АО является эффективным только в том случае, когда хотя бы одна группа введена в нижнюю часть активной зоны.
Следовательно, в ситуации, когда все группы находятся в верхней части активной зоны, то есть, когда используют второй закон, происходит автоматическая инверсия способов регулирования осевого распределения мощности АО и способности повышения мощности Рмакс. АО регулируют по его заданному значению, меняя концентрацию бора. Pi обычно находится в мертвой полосе, так как комплект Н используется, когда Pi подходит к границе своей мертвой полосы. Вместе с тем, если Pi находится за пределами своей мертвой полосы, параметр, характеризующий способность реактора к повышению мощности, регулируют по его заданному значению путем перемещения групп стержней Р1-Р5. Когда температура Тср находится в мертвой полосе вокруг своего заданного значения Тсрз, комплекты Pi и Н перемещают в противоположных направлениях. Таким образом, регулирование АО остается эффективным, даже если реактор близок к своей номинальной тепловой мощности.
Способ регулирования позволяет производить работу реактора в режиме регулирования по частоте при повышенной мощности, избегая при этом чрезмерного использования групп управления Р1-Р5 и их частых перемещений.
Необходимо отметить, что процедура последовательного введения групп комплекта Pi, согласно которой сохраняют интервал в половину активной зоны между положениями двух последовательно вводимых групп, позволяет сохранять, по меньшей мере, одну группу в нижней части активной зоны при очень большом диапазоне значений мощности реактора.
Способ был описан для реактора, группы управления которым распределены на пять групп Р1-Р5, но он может применяться и для управления реактором, управляющие пучки которого распределены на большее или меньшее число, чем пять групп.
Точно так же второй закон управления описан для случая, когда комплект управления содержит только одну группу. Вместе с тем второй закон может применяться для случая, когда комплект управления содержит две группы и более.
Параметр , характеризующий способность реактора к повышению мощности, может учитывать не только положения введения Zi групп комплекта Pi, но также положение введения Zh тяжелого комплекта Н, которое будет представлять собой дополнительную координату вектора . В этом случае заданное значение будет устанавливаться на подэтапе 13 путем "замораживания" Zh в его действительном положении. Заданные положения Ziз, связанные с заданным значением , будут в этом случае зависеть от действительного положения Zh тяжелого комплекта Н.
Описанный выше способ осуществляется одним или несколькими вычислительными устройствами, управляющими автоматическими средствами изменения концентрации бора и перемещения групп стержней.
Изобретение относится к управлению ядерными реакторами. Способ регулирования рабочих параметров активной зоны ядерного реактора, работающего на воде под давлением, содержит: - этап сбора данных (FB, FH, ТВГ, ТВХ, Q), характеризующих условия работы активной зоны реактора; - этап оценки действительных значений (Тсрд, АОд, ) рабочих параметров, по меньшей мере, в зависимости от полученных величин (FB, FH, ТВГ, ТВХ, Q); - этап выбора закона управления концентрацией поглощающего соединения ([В]) и положениями введения (Z1-Z5) групп стержней (Р1-Р5), выбираемого, по меньшей мере, между первым и вторым законами управления, отличающимися друг от друга; и - этап регулирования рабочих параметров при помощи выбранного закона управления в зависимости от заданных значений (Тсрз, АОз, ) этих параметров и от действительных значений (Тсрд, АОд, ), определенных в результате оценки. 19 з.п. ф-лы, 16 ил.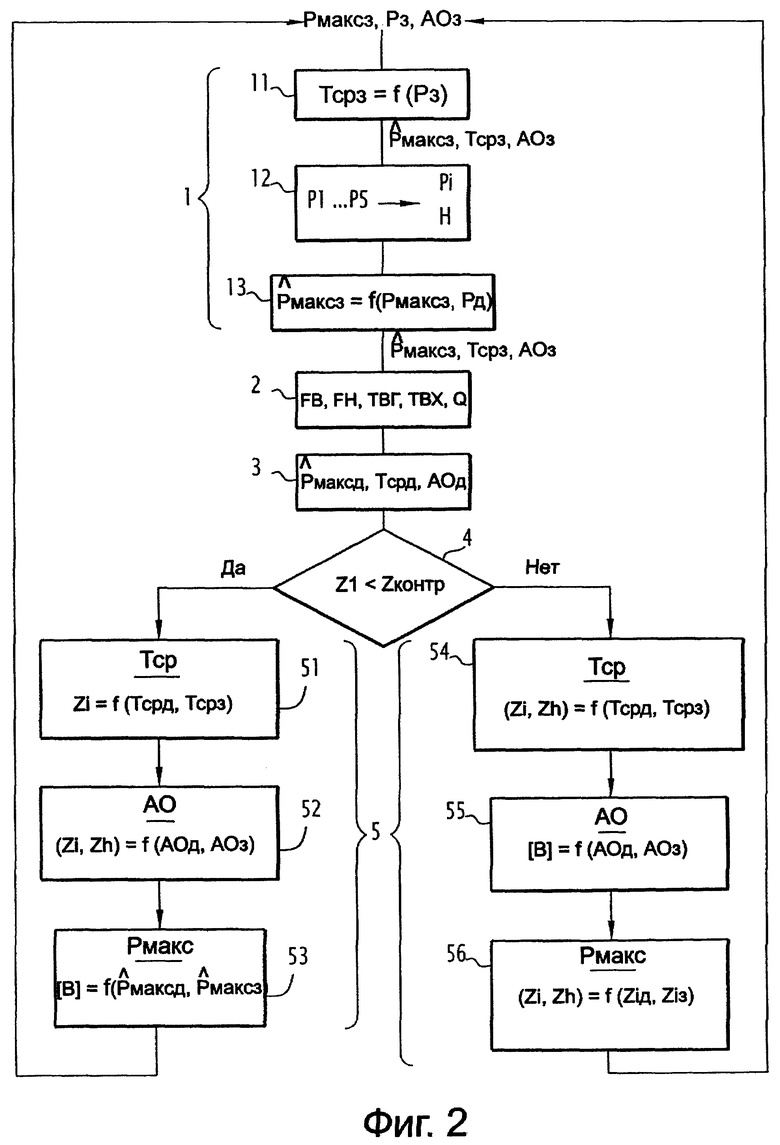
1. Способ регулирования рабочих параметров активной зоны ядерного реактора, работающего на воде под давлением, при этом указанный ядерный реактор (8) содержит:
активную зону (10), разделенную на верхнюю часть и нижнюю часть и производящую тепловую энергию;
множество групп (Р1-Р5) стержней (40) управления реактивностью активной зоны (10), при этом каждая из групп может занимать в активной зоне (10) множество вертикально ступенчатых положений, начиная от верхнего положения;
средства введения каждой группы (Р1-Р5) стержней в активную зону (10) в вертикальном направлении;
первичный контур (30), выполненный с возможностью обеспечения циркуляции первичной охлаждающей жидкости через активную зону (10);
средства корректировки концентрации, по меньшей мере, одного соединения-поглотителя нейтронов [В] в первичной охлаждающей жидкости;
средства сбора данных (FB, FH, ТВГ, ТВХ, Q), характеризующих условия работы активной зоны реактора, отличающийся тем, что содержит:
этап оценки действительных значений (Тсрд, АОд, ) рабочих параметров, по меньшей мере, в зависимости от измеренных величин (FB, FH, ТВГ, ТВХ, Q);
этап выбора закона управления концентрацией поглощающего соединения [В] и положениями введения групп (Z1-Z5) стержней, выбираемого, по меньшей мере, между первым и вторым законами управления, отличающимися друг от друга; и
этап регулирования рабочих параметров при помощи выбранного закона управления в зависимости от заданных значений (Тсрз, АОз, ) этих параметров и от действительных значений (Тсрд, АОд, ), определенных в результате оценки,
причем регулируемыми рабочими параметрами являются, по меньшей мере, средняя температура (Тср) первичной охлаждающей жидкости в активной зоне (10), осевое распределение тепловой мощности (АО) между
верхней и нижней частями активной зоны (10) и параметр (), характеризующий способность реактора к повышению мощности (Рмакс), при этом способность повышения мощности (Рмакс) соответствует тепловой мощности, которая может быть произведена активной зоной (10), когда происходит быстрый подъем групп стержней (Р1-Р5) в положение, близкое к верхнему.
2. Способ по п.1, отличающийся тем, что на этапе выбора выбирают первый закон, когда, по меньшей мере, одна группа стержней (Р1) находится в положении введения (Z1), меньшем заранее определенного положения (Zконтр), и второй закон выбирают в противоположном случае.
3. Способ по одному из пп.1 или 2, отличающийся тем, что содержит
первый этап вычисления заданных значений (Тсрз, АОз, ) рабочих параметров, по меньшей мере, в зависимости от заданных значений управления (Рз, Рмаксз, АОз).
4. Способ по п.3, отличающийся тем, что, согласно первому закону управления, осевое распределение мощности (АО) регулируют по его заданному значению (АОз) путем перемещения групп стержней (Р1-Р5), а согласно второму закону управления осевое распределение мощности (АО) регулируют по его заданному значению (АОз), корректируя концентрацию соединения-поглотителя нейтронов ([В]) в первичной охлаждающей жидкости.
5. Способ по п.3, отличающийся тем, что, согласно первому закону управления, параметр (), характеризующий способность реактора к повышению мощности (Рмакс), регулируют по его заданному значению () путем корректировки концентрации соединения-поглотителя нейтронов ([В]) в первичной охлаждающей жидкости, а согласно второму закону управления параметр () регулируют по его заданному значению () путем перемещения групп стержней (Р1-Р5).
6. Способ по п.3, отличающийся тем, что первый этап содержит подэтап вычисления заданного значения (Тсрз) средней температуры первичной охлаждающей жидкости в активной зоне на основании величины (Рз), характеризующей мощность, подаваемую в электрическую сеть, питаемую реактором (8).
7. Способ по п.6, отличающийся тем, что первый этап содержит подэтап распределения групп стержней (Р1-Р5) на комплект управления (Pi) средней температурой (Тср) первичной охлаждающей жидкости в активной зоне и на тяжелый комплект (Н), в основном обеспечивающий управление осевым распределением мощности (АО), при этом группы стержней тяжелого комплекта (Н) опускают меньше, чем группы стержней комплекта управления (Pi).
8. Способ по п.7, отличающийся тем, что тяжелый комплект (Н) всегда располагают в верхней половине активной зоны.
9. Способ по п.7, отличающийся тем, что параметр (), характеризующий способность реактора к повышению мощности (Рмакс), определяют, по меньшей мере, на основании положений введения группы или групп стержней комплекта управления (Pi), при этом первый этап содержит подэтап вычисления заданного значения (Ziз) положения группы или групп стержней комплекта управления (Pi) в зависимости от заданного значения способности к повышению мощности () и от измеренных величин (ТВГ, ТВХ, Q).
10. Способ по п.9, отличающийся тем, что этап регулирования при помощи первого закона управления содержит:
подэтап вычисления перемещений (dZi) для группы или групп стержней комплекта управления (Pi) в зависимости от заданного значения (Тсрз) и от действительного значения (Тсрд) средней температуры первичной охлаждающей жидкости в активной зоне, и
подэтап изменения положения или положений введения группы или групп стержней комплекта управления (Pi) в зависимости от рассчитанных перемещений (dZi) с целью регулирования средней температуры (Тср) первичной охлаждающей жидкости в активной зоне по заданному значению (Тсрз).
11. Способ по п.9, отличающийся тем, что этап регулирования при помощи первого закона управления содержит:
подэтап вычисления перемещений (dZi) для группы или групп стержней комплекта управления (Pi) и перемещения (dZh) для тяжелого комплекта (Н) в зависимости от заданного значения (АОз) и от действительного значения (АОд) осевого распределения тепловой мощности, и
подэтап изменения положения или положений введения группы или групп стержней комплекта управления (Pi) и/или тяжелого комплекта (Н) в зависимости от рассчитанных перемещений (dZi, dZh) с целью регулирования осевого распределения (АО) тепловой мощности по заданному значению (АОз).
12. Способ по п.11, отличающийся тем, что, когда средняя температура (Тср) охлаждающей жидкости находится в мертвой полосе вокруг ее заданного значения (Тсрз), комплект управления (Pi) и тяжелый комплект (Н) перемещают в противоположных направлениях с целью регулирования осевого распределения тепловой мощности (АО) по его заданному значению (АОз).
13. Способ по п.9, отличающийся тем, что этап регулирования при помощи первого закона управления содержит:
подэтап вычисления концентрации поглощающего соединения ([В]) в зависимости от заданного значения () и от действительного значения () параметра, характеризующего способность реактора к повышению мощности, и
подэтап приведения концентрации поглощающего соединения ([В]) в первичной охлаждающей жидкости к рассчитанной концентрации с целью регулирования параметра (), характеризующего способность реактора к повышению мощности, по его заданному значению ().
14. Способ по п.9, отличающийся тем, что этап регулирования при помощи второго закона управления содержит:
подэтап вычисления перемещения или перемещений (dZi) для группы или групп стержней комплекта управления (Pi) и перемещения тяжелого комплекта (Н) в зависимости от заданного значения (Тсрз) и от действительного значения (Тсрд) средней температуры первичной охлаждающей жидкости в активной зоне и в зависимости от заданного положения (Z1з) и от действительного положения (Z1д) группы Р1, и
подэтап изменения положения или положений введения группы или групп стержней комплекта управления (Pi) и/или тяжелого комплекта (Н) в зависимости от рассчитанных перемещений (dZi, dZh) с целью регулирования средней температуры (Тср) первичной охлаждающей жидкости в активной зоне по заданному значению (Тсрз).
15. Способ по п.14, отличающийся тем, что комплект управления (Pi) перемещают в первую очередь для регулирования средней температуры (Тср) первичной охлаждающей жидкости в активной зоне, при этом тяжелый комплект (Н) перемещают, когда комплект управления (Pi) доходит до границ мертвой полосы, в центре которой находится его заданное положение (Ziз).
16. Способ по п.9, отличающийся тем, что этап регулирования при помощи второго закона управления содержит:
подэтап вычисления концентрации поглощающего соединения ([В]) в зависимости от заданного значения (АОз) и от действительного значения (АОд) осевого распределения тепловой мощности, и
подэтап корректировки концентрации поглощающего соединения ([В]) в первичной охлаждающей жидкости с целью регулирования осевого распределения тепловой мощности (АО) по заданному значению (АОз).
17. Способ по п.9, отличающийся тем, что этап регулирования при помощи второго закона управления содержит:
подэтап вычисления перемещения или перемещений (dZi) для группы или групп стержней комплекта управления (Pi) и перемещения для тяжелого комплекта (Н) в зависимости от заданного значения (Ziз) и от действительного значения (Ziд) положений введения группы или групп комплекта управления (Pi), и
подэтап изменения положений введения группы или групп стержней комплекта управления (Pi) и/или тяжелого комплекта (Н) в зависимости от рассчитанных перемещений (dZi, dZh) с целью удержания группы или групп комплекта управления (Pi) в мертвой полосе вокруг заданного положения введения (Ziз).
18. Способ по п.17, отличающийся тем, что, когда средняя температура (Тср) охлаждающей жидкости находится в мертвой полосе вокруг ее заданного значения (Тсрз), комплект управления (Pi) и тяжелый комплект (Н) перемещают в противоположных направлениях с целью удержания группы или групп комплекта управления (Pi) в мертвой полосе вокруг его заданного положения введения (Ziз).
19. Способ по п.7, отличающийся тем, что группы стержней комплекта управления (Pi) последовательно опускают или поднимают, когда тепловая мощность, производимая активной зоной меняется, при этом две последовательно опускаемые или поднимаемые группы находятся в соответствующих положениях введения, отделенных друг от друга промежутком, остающимся постоянно меньшим заранее определенного предела.
20. Способ по п.1, отличающийся тем, что способ регулирования является автоматическим.
| АРХИТЕКТУРА УДАЛЕННОЙ РАБОТЫ С ГРАФИКОЙ | 2009 |
|
RU2493582C2 |
| RU 203080 C1, 10.03.1995 | |||
| СПОСОБ УПРАВЛЕНИЯ ЯДЕРНОЙ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКОЙ | 2001 |
|
RU2181510C1 |
| РАДИОУПРАВЛЯЕМЫЕ ШИПЫ ПРОТИВОСКОЛЬЖЕНИЯ С ВЫДВИЖНЫМИ ШТЫРЯМИ, СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ШИПАМИ ПРОТИВОСКОЛЬЖЕНИЯ С ВЫДВИЖНЫМИ ШТЫРЯМИ | 2013 |
|
RU2544907C2 |
| US 6236699 B1, 22.05.2001. | |||

