Изобретение относится к области транспортного машиностроения.
Уровень техники
Задача имеет два аспекта. Первый заключается в том, чтобы, с одной стороны, обеспечить максимум сцепления колеса транспортного средства с поверхностью дороги, с другой, - минимизировать разрушающее действие шипованных шин на дорожное покрытие путем использования выдвижных штырей шипов только в условиях проскальзывания шин относительно полотна дороги. В связи с этим корпус шипа, находясь в гнезде на поверхности протектора шины, при задвинутом штыре, не должен иметь сцепление с поверхностью дороги. Этот аспект является крайне важным для большегрузных автомобилей, которые из-за низкого сцепления шин с поверхностью дороги в зимних условиях способны создавать заторы на автомагистралях. Второй аспект задачи состоит в необходимости регулирования степени выдвижения штырей шипов и возможности их выбора с целью обеспечения требуемого, постоянного коэффициента сцепления шины с дорожным полотном в зависимости от состояния и типа последнего. Этот аспект, помимо задачи повышения безопасности на дороге, по сути, решает вопросы запрета некоторыми странами использования зимних шипованных шин из-за их разрушающего действия на дорожное полотно. Очевидно, оба аспекта предусматривают адаптивный режим изменения коэффициента сцепления шины с дорожным покрытием.
Известны конструкции шипованной шины (патент RU 2441766 С1, 2012, патент RU 2441767 С1, 2012), позволяющие повысить сцепление протектора шины с поверхностью дороги, покрытой льдом, однако, они не предусматривают технологию выдвижения шипов. Конструкция колеса с выдвижными шипами (патент RU 2457117 С1, 2012) позволяет изменять коэффициент сцепления шин с дорожным покрытием, а также повышает проходимость автомобиля при движении по укатанному снегу. Аналогично, шина (патент RU 2472635 С1, 2013), также использующая внутреннюю кольцевую камеру, обеспечивает выдвижение шипов. Однако она имеет усложненную структуру колеса и вместе с этим обладает высокой инертностью выдвижения шипов, что делает невозможным динамическое управления коэффициентом сцепления с дорожным покрытием автотранспортного средства в условиях его заноса. Шина (патент RU 2403151 С2, 2010) позволяет использовать убирание шипа на основе саморегулирующего принципа, основанного на свойстве расширения и сжатия жидкости, в частности воды. Такой поход не дает возможности точного регулирования степени выдвижения шипов, хотя позволяет улучшить сцепные качества шипов противоскольжения, путем ручной регулировки специального механизма.
Прототипом, как наиболее близким к предлагаемому изобретению относительно наличия функции выдвижения шипов, является конструкция колеса с пневматической шиной (патент RU 2457117 С1, 2012), позволяющая изменять величину выступания шипов из протектора пневматической шины. Колесо с выдвижными шипами, состоящее из обода и смонтированной на нем пневматической шины, отличающееся тем, что внутри пневматической шины установлена полиуретановая волнообразная пружина, в которую завулканизированы металлические шипы, для обеспечения поступательного движения шипа, в пневматической шине завулканизированы металлические направляющиеся втулки, внутри пневматической шины установлена резиновая камера с вентилем, обеспечивающая изменение величины выступания шипов из протектора пневматической шины, между волнообразной пружинной и камерой установлена эластичная резиновая лента, служащая для уменьшения трения между камерой и волнообразной пружиной. Для автоматического управления выдвижением шипов на автомобиле могут устанавливаться компрессоры с рессивером, связанные трубопроводом через регулируемые электромагнитные клапаны с вентилями для дополнительных камер. Указанная конструкция колеса, не рассматривая вопросы надежности, имеет следующие недостатки. Во-первых, возможная технология автоматического выдвижения шипов (патент RU 2457117 С1, 2012) имеет высокую инертность и, поэтому, не является эффективным адаптивным средством противоскольжения в условиях заноса транспортного средства. Выдвижение шипов, когда время установления их на требуемый уровень соизмеримо с периодом обращения колеса, не возможно из-за необходимости создания в камере, обеспечивающей выдвижение шипов, соответствующего повышенного давления (доли секунд являются крайне малым временем для этой операции). Во-вторых, используемые шипы имеют возможность только выдвигаться. Их активные действия с повышенной частотой, по сравнению с круговой частотой вращения колеса, в частности вращательные и возвратно-поступательные, то есть вибрационные относительно радиуса колеса, движения, не возможны, что в некоторых условиях, например в условиях тяговых нагрузок на поверхности льда или каменистой поверхности, является важным. В-третьих, отсутствует возможность комбинировать различные варианты шипов и количество их текущего использования. Так, например, эффективно используемые шипы при подстилающей поверхности в виде льда или укатанного снега могут быть разными (рекомендованные для скользкой поверхности, например льда, - патент RU 2429141 С2, 2011, патент RU 2441766 С1, 2012, патент RU 2441767 С1, 2012, для зимнего времени, в том числе в условиях уплотненного снега на поверхности дорожного покрытия, - патент RU 2340463 С1, 2008). В-четвертых, разработка колеса с выдвижными шипами в рассматриваемом прототипе требует существенного изменения в его структуре, а наличие дополнительной камеры внутри колеса повышает уязвимость системы противоскольжения относительно механических проколов и давления в шинах. При этом повышаются риски изменения давления колеса.
Предлагаемое изобретение позволяет решить задачу адаптации коэффициента сцепления шины с дорожным покрытием без указанных недостатков, не вводя существенного изменения в структуру колеса. Относительно структуры шипованной шины предлагаемого изобретения прототипом служит патент RU 2441766 С1, 2012. Его недостатком является использование в шипованной шине неубирающихся шипов. Предлагаемое изобретение предусматривает использование радиоуправляемых шипов с выдвижными штырями, степень величины выступания штырей определяется сигналами радиоуправления. В отличие от прототипа относительно функции выдвижения шипов (патент RU 2457117 С1, 2012), реализация предлагаемого изобретения возможна и в колесах, которые не используют пневматические шины (имеются научные решения перспективного развития не пневматических шин), но требующих решения задачи изменения коэффициента сцепления с дорожным покрытием. Последнее является пятым достоинством, по сравнению с рассматриваемым прототипом (патент RU 2457117 С1, 2012).
Сущность изобретения
Сущность предлагаемого изобретения в том, что для создания одинаково эффективных шин транспортных средств эксплуатируемых как в условиях бездорожья, так и в условиях хорошего дорожного полотна, исключая разрушающее воздействие в последнем случае, применяются радиоуправляемые шипы в структуре шипованной шины, обеспечивающие динамическое изменение коэффициента сцепления с дорожным покрытием за счет выдвижения штырей. Для этого предложена система с автоматическим или ручным способом управления шипами и их режимами функционирования на основе применения радиоканалов управления, беспроводной технологии энергообеспечения управляемых шипов, энергопреобразующих устройств в радиоуправляемых шипах и использования объектовой телеметрической информации в целях устойчивого управления транспортным средством в сложных дорожных условиях.
Предлагаемое изобретение является комплексным, решает единую целевую задачу по оптимизации сцепных качеств шины с дорожным покрытием, и представляет собой шипованную шину с радиоуправляемыми шипами, радиоуправляемые шипы противоскольжения с выдвижными штырями (варианты исполнения), систему и способ управления шипами противоскольжения с выдвижными штырями.
Краткая характеристика рисунков.
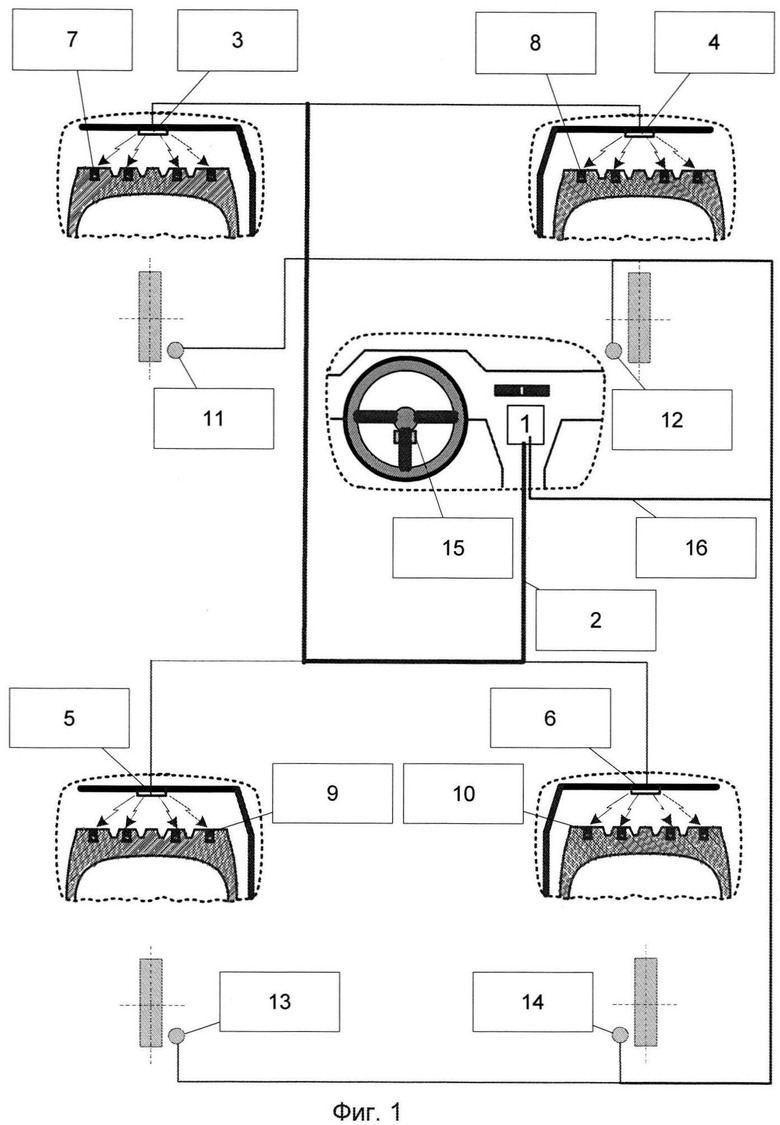
На фиг.1 представлена структурная схема системы управления шипами противоскольжения с выдвижными штырями, использующая радиоканалы.
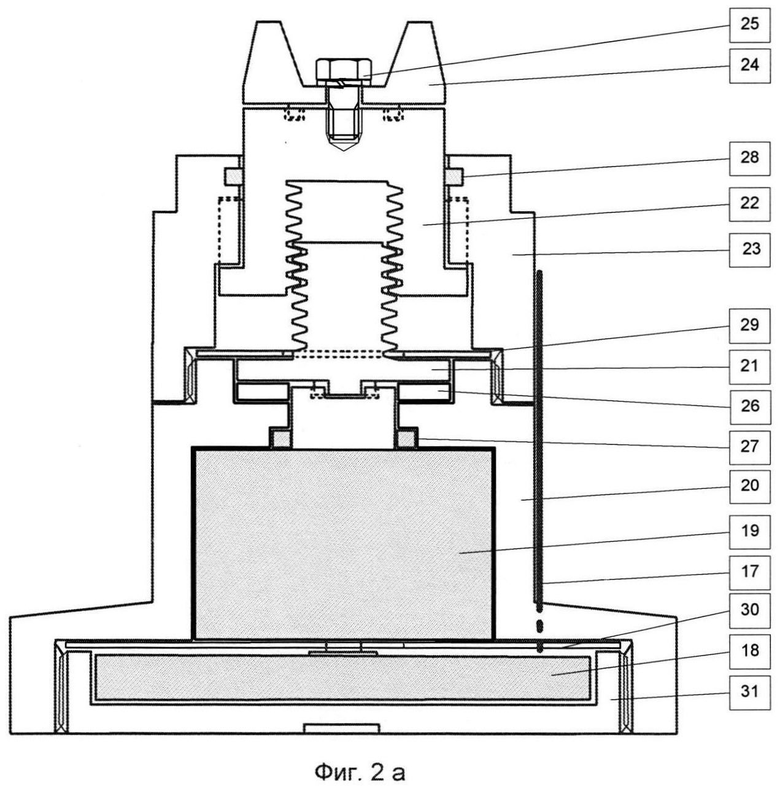
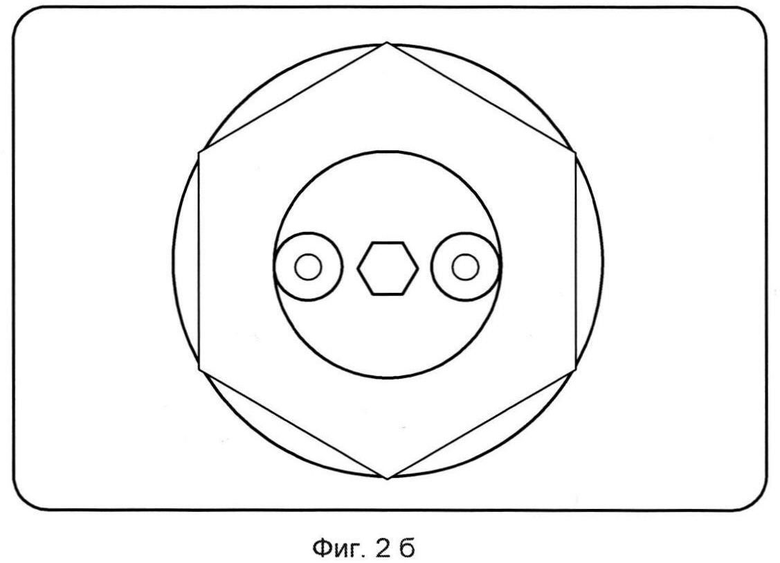
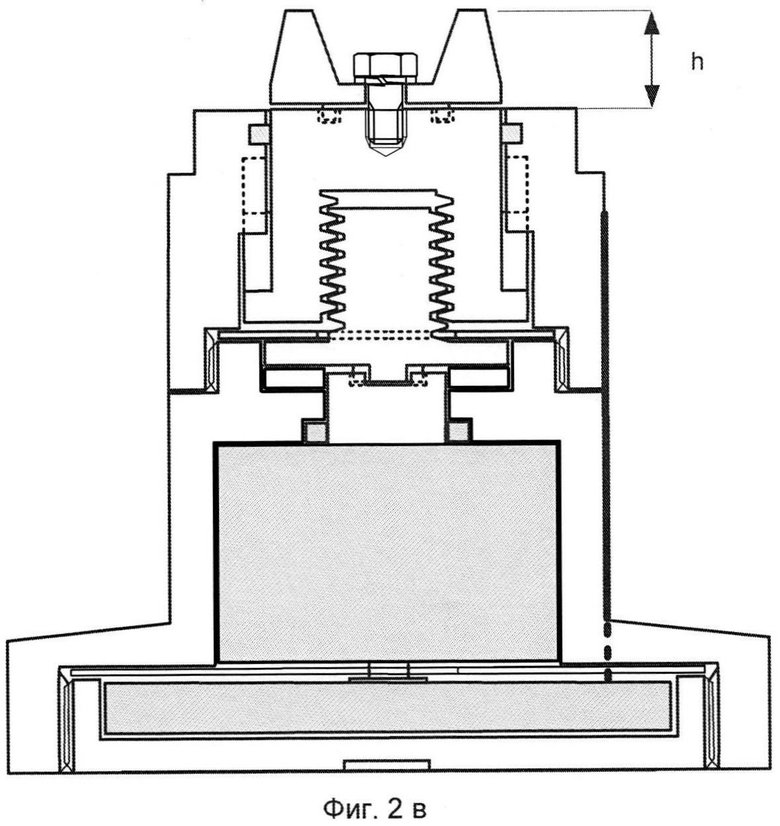
На фиг.2 приведена структура радиоуправляемого одиночного шипа с червячным механизмом выдвижения штыря (шип варианта А), причем: на фиг.2а - радиоуправляемый шип в рабочем состоянии, что соответствует выдвинутому штырю; на фиг.2б - вид сверху радиоуправляемого шипа; на фиг.2в - радиоуправляемый шип в нерабочем состоянии, то есть когда штырь задвинут.
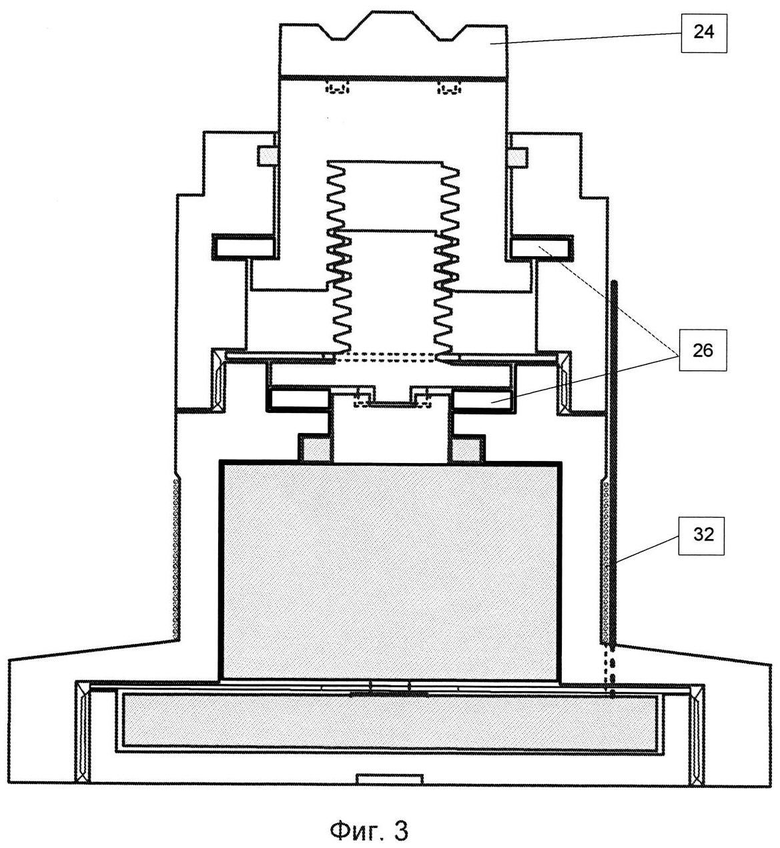
На фиг.3 приведена структура радиоуправляемого одиночного шипа с червячным механизмом выдвижения штыря (шип варианта Б), в котором реализована функция его вращения в рабочем состоянии.
На фиг.4 приведена структура радиоуправляемого одиночного шипа с использованием пьезодвигателя линейного типа (шип варианта В).
На фиг.5 приведен упрощенный шип варианта В, в котором в качестве выдвижного штыря используется ходовой винт пьезодвигателя.
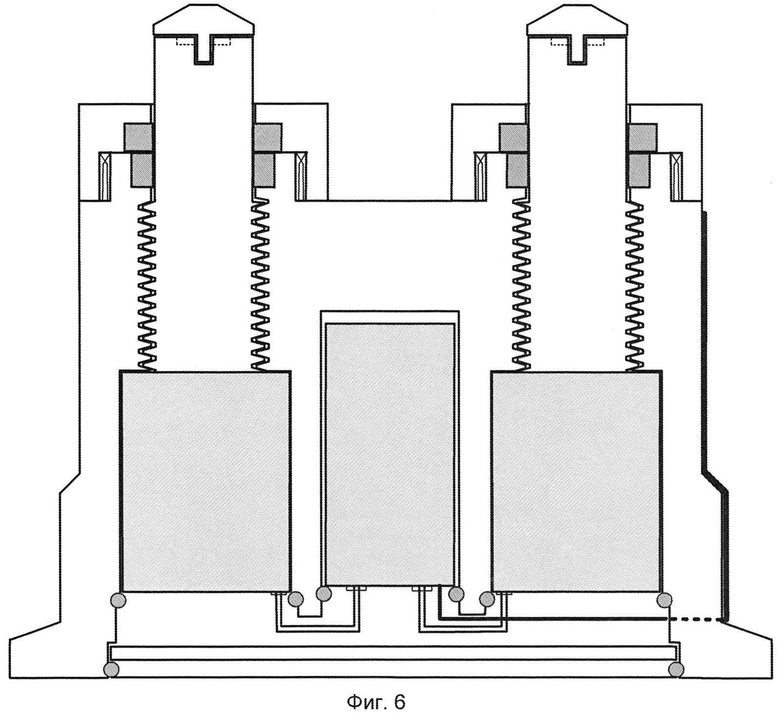
На фиг.6 приведена структура радиоуправляемого шипа матричного типа (с набором элементов шипа варианта В).
Шипованная шина с радиоуправляемыми шипами может быть получена способом изготовления шипованных шин (патент RU 2281203 С2, 2006), ее структура содержит: каркас, протекторный браслет, имеющий наружную по радиусу изнашиваемую поверхность протектора, в которой предварительно выполнены гнезда, по меньшей мере, в некоторых гнездах установлены шипы противоскольжения и отличается тем, что шипы противоскольжения являются радиоуправляемыми устройствами, то есть радиоуправляемыми шипами, которые обладают свойством выдвигать штыри в зависимости от управляющего сигнала. В нерабочем состоянии радиоуправляемые шипы имеют нулевое сцепление с поверхностью дороги.
Система управления шипами противоскольжения с выдвижными штырями (фиг.1) включает в себя: блок управления системой 1 аппаратного, программного или программно-аппаратного исполнения, выполненный как самостоятельное устройство, либо совмещенный с системой управления транспортным средством, в том числе с системой курсовой устойчивости транспортного средства; шину передачи данных 2, соединяющую блок управления системой 1 с блоками радиоуправления и энергообеспечения радиоуправляемых шипов 3, 4, 5, 6; блоки радиоуправления и энергообеспечения радиоуправляемых шипов 3, 4, 5, 6, располагаемые в непосредственной близости колес транспортного средства, шипами которых осуществляется управление; радиоуправляемые шипы с выдвижными штырями 7, 8, 9, 10; датчики угловой скорости вращения колес 11, 12, 13, 14 и датчик угла поворота рулевого колеса 15, которые шиной (линиями) передачи данных 16 соединены с блоком управления системой 1.
Отличительной особенностью упрощенного варианта системы управления шипами противоскольжения с выдвижными штырями является использование вместо блоков радиоуправления и энергообеспечения радиоуправляемых шипов 3, 4, 5, 6 одного устройства радиоуправления с дальностью действия, покрывающей все колеса транспортного средства и находящегося в месте расположения для наиболее эффективного управления шипами колес, например на поверхности днища транспортного средства, и устройств энергообеспечения радиоуправляемых шипов, находящихся в непосредственной близости колес. Дальнейшим упрощением системы управления шипами противоскольжения с выдвижными штырями является исключение из нее датчиков угловой скорости вращения колес 11, 12, 13, 14 и датчика угла поворота рулевого колеса 15 с шиной (линиями) передачи данных устройству управления системой 1. В этом случае, система управления шипами противоскольжения с выдвижными штырями не имеет обратной связи управления и лишена свойства адаптации к дорожным условиям.
Система управления шипами противоскольжения с выдвижными штырями, использующая радиоканалы для управления шипами и, как вариант, для их энергообеспечения, функционирует следующим образом. Блок управления системой 1 на основе установочной в нем информации и поступающей объектовой телеметрической информации от датчиков угловой скорости вращения колес 11, 12, 13, 14 и датчика угла поворота рулевого колеса 15 формирует электрические цифровые сигналы управления состоянием и режимами работы шипов на каждое колесо в отдельности (при наличии блока системы курсовой устойчивости возможен вариант совместного функционирования). Посредством шины данных 2 сигналы доводятся до блоков радиоуправления и энергообеспечения радиоуправляемых шипов 3, 4, 5, 6, которые преобразуют их в радиосигналы управления шипами (энергообеспечение шипов рассматривается в способе управления). В радиоуправляемом шипе (фиг.2) принимаемый с помощью антенны 17 сигнал фильтруется и декодируется энергорадиоблоком 18, который вырабатывает соответствующее питающее напряжение энергопреобразующему устройству 19, закрепленному в корпусе 20. Энергопреобразующее устройство 19 преобразует электрическую энергию в механическую вращения и передает последнюю промежуточному валу червячной передачи 21, который вращаясь, выдвигает штырь с червячной передачей 22. Выдвигаемый штырь с червячной передачей 22 имеет выступы, совмещенные с канавками направляющего корпуса 23, что придает фиксирующее положение и дополнительную жесткость для выдвижного штыря шипа, к которому прикреплен наконечник 24. В случае шин, для большегрузного транспортного средства, наконечник 24 может быстро выходить из строя. В связи с этим используется крепежный болт 25, позволяющий заменить наконечник не нарушая конструкции шипа. Роликовый подшипник 26 принимает нагрузку выдвижного штыря с червячной передачей 22 и минимизирует сопротивление вращения промежуточного вала червячной передачи 21. Сальник 27 и уплотнительное кольцо 28 обеспечивают защиту устройств шипа от загрязнения и попадания влаги. Шайбы 29 и 30, как и фиксирующая гайка 31, выполняют функцию крепления элементов шипа. В корпусе 20, у основания, имеется отверстие для соединения антенны 17 с входными цепями энергорадиоблока 18. Управляющие шипом сигналы определяют режим его работы: выдвижение штыря на определенную длину, что, с одной стороны, обеспечивает необходимый коэффициент сцепления, с другой, минимизирует разрушающее воздействие на дорожное полотно; периодическое выдвижение штыря с частотой, которая позволяет неоднократно ударять выдвижным шипом по дорожному полотну во временной промежуток соприкосновения колеса с поверхностью дороги (вариант эффективен при движении по льду); вращение штыря (например, при движении по льду или каменистой поверхности). Электропитание всех устройств системы управления шипами противоскольжения с выдвижными штырями, за исключением радиоуправляемых шипов, осуществляется от бортовой сети транспортного средства.
Способ управления шипами противоскольжения с выдвижными штырями основан на радиоуправлении шипами и применении энергопреобразования в них. Предлагается два варианта его реализации: автоматический и ручной. Автоматический способ управления обеспечивает оптимизацию сцепления шин с поверхностью дороги при решении задачи противоскольжения, в том числе в условиях заноса, транспортного средства. Он реализует динамический, адаптивный режим управления шипами на основе использования установочных данных в блоке управления системой 1 и непрерывно поступающей объектовой телеметрической информации от датчиков угловой скорости вращения колес 11, 12, 13, 14 и датчика угла поворота рулевого колеса 15. Автоматический способ управления шипами противоскольжения с выдвижными штырями состоит в последующем выполнении операций: 1) анализ объектовой телеметрической информации - сведений от датчиков угловой скорости вращения колес 11, 12, 13, 14 и датчика угла поворота рулевого колеса 15, установочных данных в блоке управления системой 1, в частности информации о состоянии, типе дорожного полотна, и вычисление значений информационных параметров сигналов управления; 2) формирование сигналов управления для каждого колеса в отдельности и их трансляция по шине передачи данных 2 блокам радиоуправления и энергообеспечения радиоуправляемых шипов 3, 4, 5, 6; 3) фильтрация сигналов управления блоками радиоуправления и энергообеспечения радиоуправляемых шипов 3, 4, 5, 6 и передача соответствующих радиосигналов управления группам шипов 7, 8, 9, 10; 4) прием и обработка энергорадиоблоками 18 управляющих сигналов и формирование электрических сигналов для энергопреобразующих устройств 19; 5) преобразование электрической энергии в механическую и, как следствие, управление движением штырей. В зависимости от кодовых посылок управляющего сигнала шипами противоскольжения реализуются режимы их работы, выбор штырей, в зависимости от дорожного полотна и в случае комбинированного размещения шипов на поверхности шины с различными наконечниками 24. Сведения от датчиков угловой скорости вращения колес 11, 12, 13, 14 и датчика угла поворота рулевого колеса 15 в процессе управления шипами служат информацией обратной связи в системе управления шипами противоскольжения. При установочных данных в блоке управления системой 1 о скользком дорожном полотне (лед, укатанный снег) система приводит шипы в рабочее состояние не зависимо от сигналов обратной связи. Ручной способ реализации управления заключается в неиспользовании системой сведений адаптивного управления, выбор параметров управления шипами противоскольжения осуществляется вручную на основе установочных данных в блоке управления системой 1. Энергообеспечение радиоуправляемых шипов осуществляется на основе методов и технологий, использующих энергию поля. Вариантами являются: способ энергетического обеспечения в беспроводных системах передачи информации (US 2011/0151789 А1, 2011); способы на основе индуктивной связи. В первом случае, в устройстве радиоуправления и энергообеспечения используется дополнительное радиопередающее устройство с направленной антенной, либо двухканальная радиосистема направленного действия. Во втором случае, на корпусе автотранспортного средства у непосредственной близости колеса, как вариант, в устройстве радиоуправления и энергообеспечения, размещается магнит, а на поверхности корпуса шипа 20 реализуется катушка индуктивности 32. В результате вращения колеса, на основе электромагнитной индукции, в энергорадиоблоке 18 осуществляется накопление электрической энергии, которая используется как для работы энергорадиоблока 18, так и для энергопреобразующего устройства 19 шипа противоскольжения.
Радиоуправляемые шипы с выдвижными штырями (фиг.2-6) размещаются в предварительно подготовленных гнездах на поверхности протекторов шин. Вариант установки шипов осуществляется способом, представленным в патенте RU 2281203 С2, 2006. Радиоуправляемые шипы, в зависимости от количества выдвижных штырей, могут быть двух типов исполнения: одиночные шипы (фиг.2 - вариант А, фиг.3 - вариант Б, фиг.4, 5 - вариант В) и шипы матричного типа (фиг.6). Варианты одиночных шипов отличаются применяемыми энергопреобразующими устройствами, в качестве которых предлагается использовать мощные микроэлектродвигатели, пьезоэлектродвигатели (пьезодвигатели, актюаторы), функциональными возможностями, конструктивным исполнением.
Вариант А. Радиоуправляемый шип с выдвижрым штырем представляет собой устройство (фиг.2), структурными элементами которого являются: антенна 17; энергорадиоблок 18; энергопреобразующее устройство 19, а именно из электрической энергии в механическую вращения; корпус шипа 20; промежуточный вал червячной передачи (червяк) 21; выдвижной штырь с червячной передачей 22; направляющий корпус 23; наконечник 24; крепежный болт 25; роликовый подшипник 26; сальник 27; уплотнительное кольцо 28; шайбы 29, 30; фиксирующая гайка 31. Высота h (фиг.2в) наконечника 23 должна быть такой, чтобы в задвинутом состоянии штыря он не соприкасался с поверхностью дороги.
Вариант Б. Радиоуправляемый шип с выдвижным штырем (фиг.3) отличается от шипа варианта А функциональной возможностью вращения его штыря. В связи с этим отсутствуют канавки в направляющем корпусе 23 и соответствующие выступы на выдвижном штыре с червячной передачей 22, имеется дополнительный роликовый подшипник 26. На фиг.3 приведен вариант шипа, в котором выдвигаемый штырь с червячной передачей 22 и наконечник 24 (приведен в виде трезубца для функции вращения) скреплены не болтом 25, как в приведенном варианте А (фиг.2а), а специальным клеящем веществом. Кроме того, на примере радиоуправляемого шипа варианта Б приведена реализация размещения наружной катушки индуктивности 32, являющейся элементом системы энергообеспечения шипа.
Вариант В. Радиоуправляемый шип с выдвигающимся штырем (фиг.4) отличается от шипа варианта А применением в качестве энергопреобразующего устройства пьезодвигателя линейного типа с ходовым винтом 33, что позволяет исключить механизм червячной передачи. Структурной особенностью шипа является использование стального шара 34, обеспечивающего равномерную нагрузку, штопорного кольца 35. Конструкция выдвижного штыря с червячной передачей 22 изменена, вместо внутренней резьбы имеется гнездо под стальной шар. В результате, на основе фиксирующего действия штопорного кольца 35 элементов, а именно ходового винта 33, стального шара 34 и выдвижного штыря 22, осуществляются устойчивые возвратно-поступательные движения последнего. В рассматриваемых вариантах выдвижной штырь 22 и направляющий корпус 23 изготавливаются из материала повышенной прочности.
Упрощенный вариант В радиоуправляемого шипа с выдвижным штырем (фиг.5) отличается отсутствием самостоятельно существующего элемента - выдвижного штыря 22 и механизма соединения его с ходовым винтом пьезодвигателя. Функцию выдвижного штыря выполняет ходовой винт 33. Вместо направляющего корпуса 23 используется крепежная гайка 36, которая фиксирует во фронтовой части шипа втулку 37 из материала повышенной прочности и сальник 27, защищающий внутреннее устройство от загрязнения и влаги. Основание шипа закрывается защитной крышкой 38, которая фиксируется, как и внутренние элементы шипа, штопорными кольцами 35.
Матричный тип радиоуправляемого шипа (фиг.6) с двумя и более выдвижными штырями, которые могут иметь различные типы наконечников, представляет собой устройство с множеством независимых, совмещенных в одном корпусе одиночных шипов, использующих один энергорадиоблок. Для вариантов радиоуправляемых шипов резьбовое соединение корпуса шипа 20 и направляющего корпуса 23 может быть заменено (либо усилено) склеиванием или спайкой (сваркой) этих элементов.
В приведенном описании варианты исполнения шипов показаны с целью иллюстрации рассматриваемого изобретения и представления основных элементов его новизны. Специалистам в данной области техники очевидно, что введенные изменения в модификацию шипов, а также системы в целом, могут не выходить из объема рассматриваемого изобретения и находиться в рамках прилагаемой формулы изобретения.
Настоящее изобретение позволяет
- реализовать адаптивный, динамический режим управления выдвижением штырей радиоуправляемых шипов, обеспечивающих динамическое изменение коэффициента сцепления с дорожным покрытием;
- минимизировать разрушающее действие шипов на дорожное полотно в условиях, достаточных для обеспечения безопасного движения транспортного средства путем как полного их выключения, так и частичного использования (выдвижения штырей не в полную длину);
- повысить максимально эффективное взаимодействие колеса с дорожным покрытием, путем: введения динамического движения штырей радиоуправляемых шипов относительно самого колеса, а именно вращательного и периодического возвратно-поступательного, применения комплекса различного рода наконечников, каждый из которых в большей степени подходит к той или иной поверхности дорожного полотна;
- использовать систему управления шипами противоскольжения с выдвижными шипами в качестве автоматической системы повышения безопасности в условиях заноса автотранспортного средства, так как время реакции системы, в основном, определяется периодом анализа объектовой телеметрической информации используемых датчиков и скоростью выдвижения штырей энергопреобразующих устройств радиоуправляемых шипов. Временная задержка выдвижения штыря соизмерима с периодом вращения колеса и с учетом быстродействия пьезодвигателя, используемого в качестве энергопреобразующего устройства, может составлять доли секунды.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШИНА С УПРАВЛЯЕМЫМИ ШИПАМИ ПРОТИВОСКОЛЬЖЕНИЯ, РАДИОУПРАВЛЯЕМАЯ СИСТЕМА ШИПОВ ПРОТИВОСКОЛЬЖЕНИЯ, УПРАВЛЯЕМЫЙ ШИП ПРОТИВОСКОЛЬЖЕНИЯ С ВЫДВИЖНЫМ ШТЫРЕМ | 2013 |
|
RU2536565C1 |
| ШИНА ТРАНСПОРТНОГО СРЕДСТВА И ШИП ПРОТИВОСКОЛЬЖЕНИЯ, ВСТАВЛЯЕМЫЙ В ШИНУ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2623320C2 |
| КОЛЕСО С ВЫДВИЖНЫМИ ШИПАМИ | 2010 |
|
RU2457117C1 |
| ШИП ПРОТИВОСКОЛЬЖЕНИЯ С МЕТАЛЛОКЕРАМИЧЕСКИМ ЭЛЕМЕНТОМ | 2003 |
|
RU2292269C2 |
| ШИП ПРОТИВОСКОЛЬЖЕНИЯ | 2011 |
|
RU2579386C2 |
| Шина с шипами противоскольжения | 1980 |
|
SU1100154A1 |
| ШИП ПРОТИВОСКОЛЬЖЕНИЯ (ВАРИАНТЫ) И ИЗНОСОСТОЙКАЯ ВСТАВКА ДЛЯ ЭТОГО ШИПА | 2005 |
|
RU2280564C1 |
| ШИНА С УБИРАЮЩИМСЯ ШИПОМ | 2008 |
|
RU2403151C2 |
| ШИП ПРОТИВОСКОЛЬЖЕНИЯ ДЛЯ ШИН ТРАНСПОРТНЫХ СРЕДСТВ | 1998 |
|
RU2175914C2 |
| ШИП ПРОТИВОСКОЛЬЖЕНИЯ ДЛЯ КОЛЕС ТРАНСПОРТНЫХ СРЕДСТВ (ВАРИАНТЫ) | 1997 |
|
RU2117585C1 |

Изобретение относится к области транспортного машиностроения. Шипованная шина содержит радиоуправляемые шипы, размещаемые в предварительно подготовленных гнездах на поверхности протектора. Радиоуправляемый шип имеет энергопреобразующее устройство, обеспечивающее движение штыря. Способ управления шипами противоскольжения с выдвижными штырями основан на адаптивном и динамическом их радиоуправлении с использованием объектовых параметров контроля. Система управления шипами противоскольжения включает: блок управления системой; шины передачи данных; устройства радиоуправления и энергообеспечения радиоуправляемых шипов; радиоуправляемые шипы с выдвижными штырями; датчики угловой скорости вращения колес; датчик угла поворота рулевого колеса. Упрощенный вариант системы имеет одно устройство радиоуправления шипами. Технический результат - оптимизация сцепных качеств шины с дорожным покрытием, динамическое изменение коэффициента сцепления с учетом условий эксплуатации транспортного средства и характеристик дорожного полотна, универсальность применения шин в различных климатических условиях. 3 н. и 8 з.п. ф-лы, 6 ил.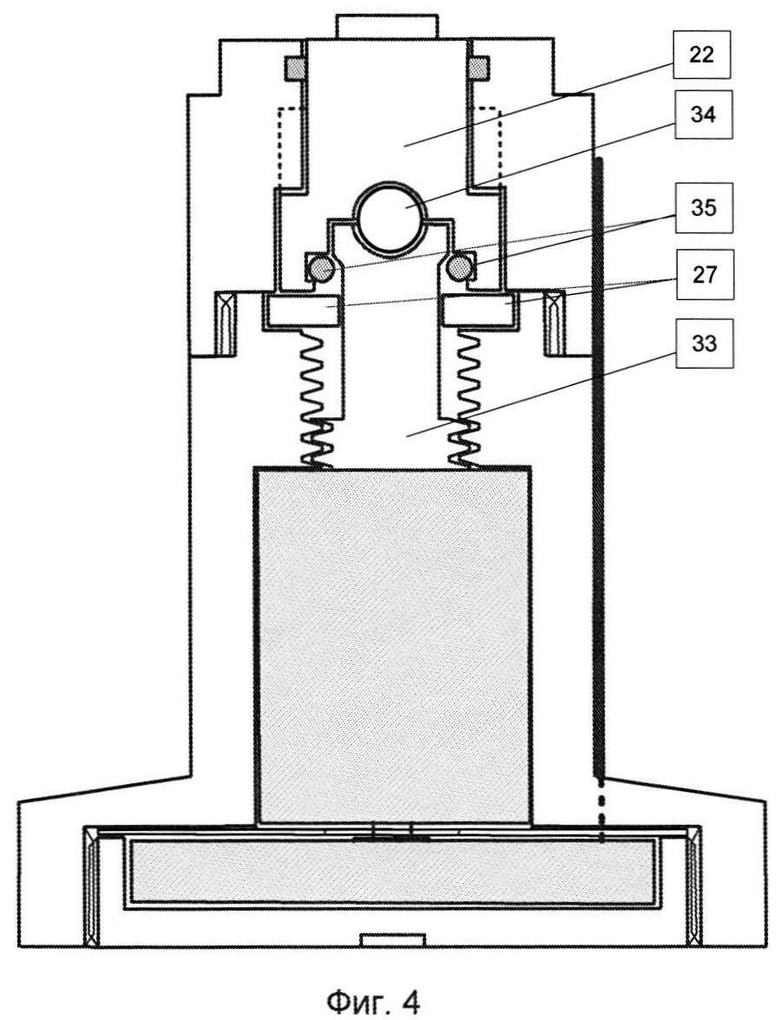
1. Радиоуправляемый шип противоскольжения, отличающийся тем, что в состав входят: антенна, корпус шипа, энергорадиоблок, энергопреобразующее устройство электрической энергии в механическую, выдвижной штырь.
2. Радиоуправляемый шип противоскольжения по п.1, отличающийся использованием корпуса шипа матричного типа, совмещающего два и более комплектов энергопреобразующих устройств и выдвижных штырей с общим для всех энергорадиоблоком.
3. Радиоуправляемый шип противоскольжения с выдвижным штырем по п.1, отличающийся использованием наружной катушки индуктивности.
4. Радиоуправляемый шип противоскольжения с выдвижным штырем по п.1, отличающийся использованием сальника (пыльника), уплотнительной втулки повышенной прочности, наконечника, который фиксируется и закрепляется на выдвижном штыре различными средствами крепления.
5. Радиоуправляемый шип противоскольжения с выдвижным штырем по п.1, отличающийся использованием в качестве энергопреобразующего устройства пьезоэлектродвигателя, или мощного микроэлектродвигателя, с вращающимся ротором, подшипника скольжения, промежуточного вала червячной передачи, выдвижного штыря с червячной передачей и наконечником, направляющего корпуса, наличием канавок в направляющем корпусе и соответствующих им фиксирующих выступов в выдвижном штыре, гайки и шайбы для крепления энергопреобразующего устройства, сальника, шайбы для фиксации промежуточного вала червячной передачи.
6. Радиоуправляемый шип противоскольжения с выдвижным штырем по п.1, отличающийся использованием в качестве энергопреобразующего устройства пьезодвигателя линейного типа, выдвижного штыря с внутренним гнездом под стальной шар, стального шара, направляющего корпуса, стопорного кольца и уплотнительного кольца.
7. Радиоуправляемый шип противоскольжения с выдвижным штырем по п.1, отличающийся использованием в качестве энергопреобразующего устройства пьезодвигателя линейного типа, ходовой винт которого выполняет функцию выдвижного штыря, уплотнительной втулки повышенной прочности, крепежной гайки, наличием резьбы с внутренней стороны корпуса шипа с шагом, равным шагу резьбы ходового винта пьезодвигателя.
8. Система управления шипами противоскольжения с выдвижными штырями, отличающаяся использованием блока управления системой, блоков радиоуправления и энергообеспечения радиоуправляемых шипов, как минимум один блок на одно колесо, соединенных шинами передачи данных с блоком управления системой и радиоуправляемых шипов противоскольжения с выдвижными штырями, расположенных в гнездах на поверхности протектора шин.
9. Система управления шипами противоскольжения с выдвижными штырями по п.8, отличающаяся использованием датчиков угловой скорости вращения колес транспортного средства, датчика угла поворота рулевого колеса и шин передачи данных, соединяющих датчики с блоком управления системой.
10. Способ управления шипами противоскольжения с выдвижными штырями, отличающийся формированием сигналов управления шипами противоскольжения, использованием беспроводной технологии передачи сигналов управления шипами противоскольжения, преобразования электрической энергии в механическую для приведения шипов противоскольжения в рабочее состояние и управления их режимами работы: штырь выдвинуть; штырь задвинуть; вращательное или возвратно-поступательное движение штыря в заданный период работы шипа; изменить степень выдвижения штыря, комбинированным и независимым управлением шипами противоскольжения с выдвижными штырями.
11. Способ управления шипами противоскольжения с выдвижными штырями по п.10, отличающийся автоматическим выполнением операций: 1) анализ объектовой телеметрической информации, получаемой от датчиков угловой скорости вращения колес транспортного средства и датчика угла поворота рулевого колеса, вычисление значений параметров сигналов управления с учетом установочных данных в блоке управления системой; 2) формирование сигналов управления для каждого колеса в отдельности, их передача блокам (устройству) радиоуправления и энергообеспечения радиоуправляемых шипов; 3) формирование и передача блоками (устройством) радиоуправления и энергообеспечения радиоуправляемых шипов соответствующих радиосигналов; 4) прием и обработка энергорадиоблоками радиоуправляемых шипов сигналов и выработка электрических сигналов для энергопреобразующих устройств с целью преобразования электрической энергии в механическую и, как следствие, управление движениями штырей.
| DE 4005010 A1, 29.08.1991 | |||
| DE 3919710 A1, 20.12.1990 | |||
| WO 9416913 A1, 04.08.1994 | |||
| Устройство для управления сцеплением транспортного средства с дорогой | 1982 |
|
SU1178637A1 |
| Устройство для управления положением регулируемых шипов шины транспортного средства | 1985 |
|
SU1600971A1 |
| УСТРОЙСТВО ДЛЯ ПОВЫШЕНИЯ СИЛЫ СЦЕПЛЕНИЯ КОЛЕСА АВТОМОБИЛЯ С ПОВЕРХНОСТЬЮ ДОРОГИ | 2008 |
|
RU2374086C1 |
| ШИНА С ВЫДВИЖНЫМИ ШИПАМИ | 2011 |
|
RU2472635C1 |

