Изобретение относится к электротехнике и может быть использовано для управления одно- и многофазными электродвигателями переменного тока.
Известно устройство для управления электродвигателем переменного тока [1], по которому управление электродвигателем переменного тока осуществляют от тиристорного преобразователя переменного тока, в котором управление углом отпирания вентилей осуществляется от датчиков нулевого значения тока и напряжения, питающего электродвигатель. Переход на управление от двух датчиков позволяет уменьшить зависимость выходных параметров преобразователя от соотношения активно-индуктивных составляющих нагрузки и снизить интенсивность переходных процессов. Однако угол управления вентилями γ транцендентно зависит от угла нагрузки φ. Поэтому при изменении характера нагрузки, а значит и угла φ, угол управления γ также меняется, что влияет на стабильность параметров преобразователя и электропривода в целом.
Недостатком данного изобретения является отсутствие стабилизации выходных параметров преобразователя при изменении соотношения активно-индуктивных составляющих параметров нагрузки и возможность опрокидывания приводного электродвигателя.
Наиболее близким по технической сути к предложению является устройство управления электродвигателем переменного тока [2]. Данное устройство снабжено функциональным преобразователем 14 "интервал времени - напряжение", который по сути является датчиком угла сдвига между током и напряжением (датчиком угла нагрузки φ). В этом случае функциональный преобразователь "интервал времени - напряжение" вырабатывает сигнал, пропорциональный углу нагрузки φ, который далее используется как сигнал отрицательной обратной связи и влияет на величину общего сигнала управления. При этом устройство управления работает по следующему алгоритму:

где: Vy - напряжение управления; Vз - напряжение задания;
Vocφ - напряжение обратной связи по углу φ.
Таким образом, предусмотрена стабилизация угла управления вентилями.
Однако данное техническое решение имеет существенный недостаток - возможность опрокидывания двигателя.
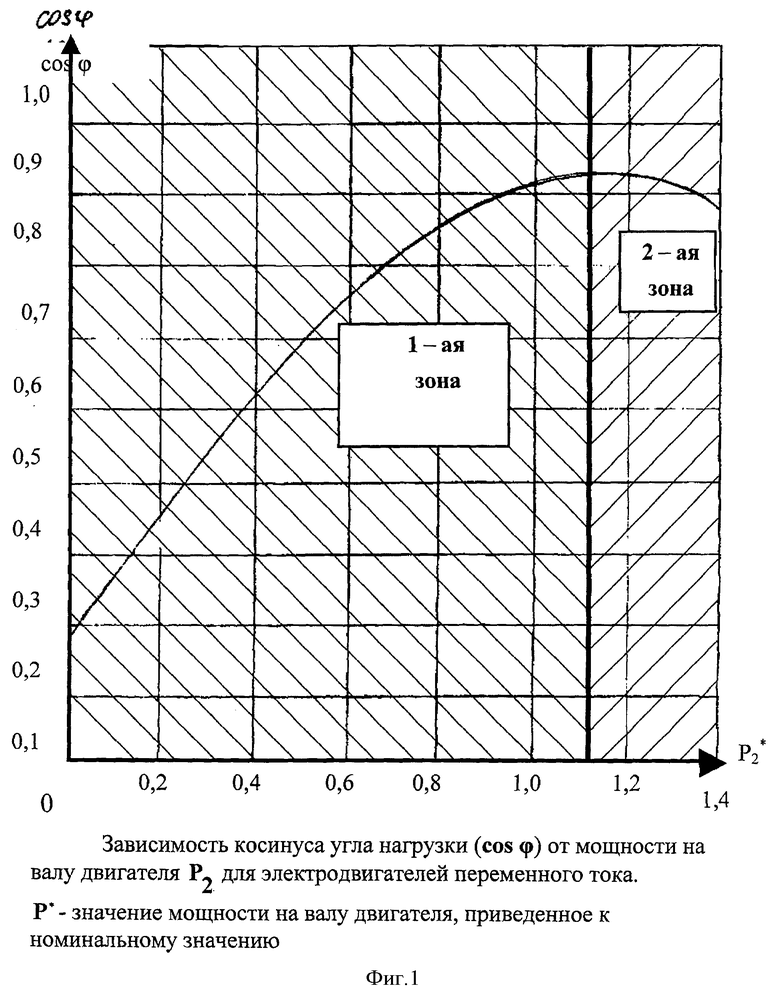
На фиг.1 изображена рабочая характеристика двигателя - зависимость косинуса угла нагрузки (cosφ) от мощности на валу двигателя Р2 для электродвигателей переменного тока. Из фиг.1 видно, что зависимость cosφ=f(P2) имеет явно выраженный максимум функции в точке  по оси абсцисс и cosφmax по оси ординат. Для удобства анализа обозначим участок кривой при изменении мощности от 0 до
по оси абсцисс и cosφmax по оси ординат. Для удобства анализа обозначим участок кривой при изменении мощности от 0 до  - I, а при изменении от до ∞ - II. Нормальная (устойчивая) работа двигателя переменного тока наблюдается в случае, когда рабочая точка находится на восходящей ветви рабочей характеристики cosφ=f(P2), участок - I. При работе на II-м участке мощность (ток) нагрузки увеличивается, a cosφ уменьшается, угол φ увеличивается, что ведет к увеличению Vocφ и уменьшению суммарного управляющего напряжения (1). При этом напряжение, приложенное к двигателю, уменьшается и двигатель опрокидывается. Очевидно, что работа приводного двигателя на II-м участке по алгоритму Vy=Vз-Vocφ является неустойчивой и приводит к опрокидыванию двигателя.
- I, а при изменении от до ∞ - II. Нормальная (устойчивая) работа двигателя переменного тока наблюдается в случае, когда рабочая точка находится на восходящей ветви рабочей характеристики cosφ=f(P2), участок - I. При работе на II-м участке мощность (ток) нагрузки увеличивается, a cosφ уменьшается, угол φ увеличивается, что ведет к увеличению Vocφ и уменьшению суммарного управляющего напряжения (1). При этом напряжение, приложенное к двигателю, уменьшается и двигатель опрокидывается. Очевидно, что работа приводного двигателя на II-м участке по алгоритму Vy=Vз-Vocφ является неустойчивой и приводит к опрокидыванию двигателя.
Цель изобретения - повышение надежности работы приводного двигателя и оптимизация выходных параметров электропривода при всех нагрузочных режимах.
Поставленная цель достигается тем, что устройство дополнительно снабжено датчиком тока двигателя 37 и функциональным преобразователем "ток двигателя - угол нагрузки φ" 38, выполняющим сравнение угла нагрузки φ двигателя по величине с учетом значения тока нагрузки двигателя и вырабатывающим сигнал отрицательной или положительной обратной связи в соответствии с нагрузкой (током нагрузки) на электродвигатель, первый вход которого соединен с выходом датчика тока, а второй его вход соединен с выходом функционального преобразователя 14 "интервал времени - напряжение", выход функционального преобразователя "ток двигателя - угол нагрузки φ" 38 соединен с соответствующим входом источника управляющего напряжения.
Предлагаемое техническое решение позволяет не только оптимизировать параметры электропривода, но и повысить надежность работы при резких и плавных переходах рабочей точки из зоны участка I в зону участка II рабочей характеристики cosφ=f(P2) и наоборот.
На фиг.2 представлена функциональная схема предлагаемого устройства.
Устройство управления электродвигателем переменного тока содержит группы параллельно включенных вентилей 1 по числу фаз, входы каждой из групп соединены с соответствующими фазами электросети, а выходы группы вентилей 1 соединены с соответствующими фазами электродвигателя. Датчик нулевого значения тока 2, предназначенный для фиксации момента прохождения тока через нуль, подключен параллельно группе вентилей 1 и фиксирует их состояние (открыт, закрыт), выход которого подключен к соответствующему входу счетчика тактовых импульсов 3, второму входу элемента И-НЕ 28 функционального преобразователя 14 "интервал времени - напряжение", и входу элемента И-НЕ 23 (инвертора) логического ключевого элемента 4, предназначенному для формирования импульсов управления вентилями 1. Информационные входы которого подключены к выходу логического переключающего элемента 6 (вход 3 элемента И-НЕ 22), предназначенного для формирования сигналов управления при максимально возможном, для данной нагрузки, угле управления вентилями 1; к выходу порогового элемента 12 (вход 3 элемента И-НЕ 22), предназначенного для упрощения конструкции преобразователя 9 "напряжение - частота" и увеличения быстродействия системы в режиме непрерывного тока при сохранении требуемой симметрии управляющих импульсов; к выходу датчика 5 нулевого значения напряжения подключен вход 2 элемента И-НЕ 21, предназначенного для фиксации момента прохождения через нуль фазы напряжения сети; к выходу счетчика 3 тактовых импульсов, предназначенного для формирования задержки на выдачу импульсов управления для открытия вентилей 1, подключен вход 2 элемента И-НЕ 22. Выход элемента И-НЕ 22 вместе с первым входом элемента И-НЕ 21 логического ключевого элемента 4 подключены к установочному R-входу счетчика 3 тактовых импульсов. Преобразователь 9 "напряжение - частота" предназначен для преобразования суммарного аналогового сигнала управления (напряжения) в частоту следования тактовых импульсов. К запрещающему входу преобразователя 9 подключен выход элемента задержки 10, который предназначен для блокировки выхода преобразователя 9 на заранее заданное время, что необходимо для обеспечения работы устройства в начальный период времени с максимально возможным углом управления вентилями 1 (минимальным напряжением). Вход преобразователя 9 "напряжение - частота" вместе со входом элемента задержки 10 и порогового элемента 12 подключен к выходу источника 13 суммарного управляющего напряжения. Логический ключевой элемент 4 состоит из трех элементов И-НЕ 21, 22, и 24 и одного инвертора 23. Логический переключающий элемент 6 состоит из двух элементов И-НЕ 18, 19 и элемента совпадения И-НЕ 20. Датчик нулевого значения тока 2 выполнен на трансформаторе напряжения, вторичная обмотка которого через выпрямитель 15 подключена к входу транзистора 16, выход которого является выходом датчика тока 2. Сигнал синхронизации управляющих импульсов по напряжению формируется датчиком 5 нулевого значения напряжения, выполненным на компараторе 17, выход которого является выходом датчика 5, к которому подключены: первый вход элемента И-НЕ 18 логического переключающего элемента 6; второй вход элемента И-НЕ 21 логического ключевого элемента 4, первый вход элемента совпадения И 25 и второй вход элемента И-НЕ 27 функционального преобразователя 14 "интервал времени - напряжение", предназначенному для формирования сигнала обратной связи при изменении параметров нагрузки. Первый вход элемента И-НЕ 18, второй и третий входы элемента И-НЕ 19 из каждого канала управления соединены одноименными входами между собой и элементом совпадения И-НЕ 25, выход которого подключен к установочному входу дополнительных счетчиков 7 тактовых импульсов, на счетный вход которого подаются тактовые импульсы с выхода преобразователя 8 "напряжение - частота", вход которого подключен к выходу источника напряжения первичного пуска 11. Выход счетчика 7 тактовых импульсов соединен со вторым входом элемента совпадения И-НЕ 20 логического переключающего элемента 6, на первый вход которого подается сигнал с выхода И-НЕ 19. Выходы элементов И-НЕ 18 и 19 соединены с их первым и вторым входом перекрестно. Выход элемента совпадения И-НЕ 20 вместе с выходом порогового элемента 12 подключен к третьему входу элемента И-НЕ 22, на второй вход которого подается сигнал с выхода счетчика 3 тактовых импульсов. Выход элемента И-НЕ 22 соединен со вторым входом элемента И-НЕ 24, на первый вход которого подается сигнал с выхода инвертора 23, с выхода элемента И-НЕ 24 сигнал поступает на включение вентилей 1.
Для оптимизации выходных параметров электропривода во всех режимах работы устройство снабжено датчиком тока двигателя 37 и функциональным преобразователем 38 "датчик тока - угол нагрузки φ", выполняющим сравнение угла нагрузки φ двигателя по величине с учетом значения тока нагрузки и вырабатывающим сигнал отрицательной или положительной обратной связи, первый вход которого соединен с выходом датчика тока 37, измеряющего текущее значение тока, а второй его вход соединен с выходом функционального преобразователя 14 "интервал времени - напряжение", выход функционального преобразователя 38 "ток двигателя - угол нагрузки φ" соединен с соответствующим входом источника управляющего напряжения 13.
Функциональный преобразователь 14, состоящий из RS-триггера, собранного на элементах И-НЕ 27 и 28, выходы которых соединены перекрестно с их первыми входами, выход триггера через интегрирующую цепочку, собранную на элементах 29 и 30 и 31, соединен с первым входом корректирующего усилителя 36, этот же вход усилителя 36 соединен с выходом элемента 32 и входом цепи обратной связи, в которую включен блок нелинейности, собранный на элементах 33, 34 и 35. Второй вход корректирующего усилителя 36 через огранивающий резистор соединен с шиной заземления, выход корректирующего усилителя 36 является выходом преобразователя 14, который соединен со вторым входом преобразователя 38 "ток двигателя - угол нагрузки φ", выход которого соединен с соответствующим входом источника управляющего напряжения 13, вход которого соединен с шиной задания.
Устройство работает следующим образом.
Достижение напряжением какой-либо фазы питающей сети нулевого значения приводит к исчезновению на входе датчика 5 нуля напряжения входного сигнала, что приводит к появлению на выходе компаратора 17 датчика 5 сигнала, адекватного логическому нулю. Попадая на вход 1 элемента И-НЕ 18, этот сигнал устанавливает на его выходе сигнал логической единицы, который, попадая на выход 1 элемента И-НЕ 19, приводит к появлению на его выходе сигнала, соответствующего логическому нулю, так как на двух других 2 и 3 входах элемента И-НЕ 19 присутствуют сигналы логической единицы. Таким образом, триггер, собранный на элементах И-НЕ 18 и 19 логического переключающего элемента 6, устанавливается в исходное (нулевое) состояние сигналом синхронизации датчика нуля напряжения "собственной" фазы, в единичное состояние он устанавливается сигналом синхронизации "соседней фазы" со сдвигом на 60 электрических градусов относительно точки естественной коммутации.
При появлении на входе 2 или 3 элемента И-НЕ 19 сигнала логического нуля от датчиков 5, установленных в других фазах, на выходе элемента И-НЕ 19 устанавливается сигнал логической единицы, который попадает на вход 1 элемента совпадения И-НЕ 20. На второй вход элемента совпадения И-НЕ 20 поступают сигналы со счетчика 7. Совпадение единиц на входе 1 и 2 элемента И-НЕ 20 приводит к появлению на его выходе сигнала логического нуля. Этот сигнал поступает на вход 3 элемента И-НЕ 22. С выхода датчика 5 нуля напряжения сигнал одновременно подается на 1 вход элемента И-НЕ 25 и 2 вход элемента И-НЕ 21. В состав логического ключевого элемента 4 входит триггер, собранный на элементах И-НЕ 21 и 22. Появление на 2 входе элемента И-НЕ 21 сигнала логического нуля приводит к появлению на его выходе сигнала логической единицы. Появление на входе 1 элемента И-НЕ 22 сигнала логического нуля приводит к появлению на выходе сигнала, соответствующего логической единицы, которая попадает на вход 2 элемента И-НЕ 24. Поскольку оба вентиля 1 в фазе А закрыты, то на первичной обмотке трансформатора датчика 2 нулевого значения присутствует высокий потенциал, на вторичной обмотке этого трансформатора также присутствует высокий потенциал, который через выпрямитель 15 поступает на базу транзистора 16, который открывается и на его выходе появляется сигнал, соответствующий логическому нулю, который, попадая на вход 1 инвертора 23, способствует появлению на его выходе сигнала логической единицы. Таким образом, на выходах 1 и 2 элемента 24 присутствуют сигналы логической единицы, что приводит к появлению на его выходе сигнала логического нуля, который является сигналом на включение вентилей 1.
Для ограничения максимального угла открытия вентилей 1, при котором осуществляется фазовое управление, предусматривающее управление с бестоковыми паузами на нагрузке, служат: схема совпадения 25, преобразователь "напряжение - частота" 8, дополнительный счетчик тактовых импульсов 7 с инвертором 26 и источник первичного пуска 11. Преобразователь 8 вырабатывает импульс с периодом следования, зависящим от величины задания, поступающего из источника первичного пуска 11. Задание же, в свою очередь, зависит от реального соотношения активно-индуктивных параметров нагрузки (подбирается на этапе пусконаладочных работ). С выхода преобразователя 8 импульсы поступают на счетный вход дополнительного счетчика 7 тактовых импульсов. Установка счетчика 7 в исходное состояние осуществляется импульсами синхронизации по напряжению, поступающими на входы 1, 2, 3 элемента И-НЕ 25 от соответствующих датчиков 5. На выходе счетчика 7 вырабатываются импульсы, задержанные относительно импульсов синхронизации по напряжению от датчиков 5.
При первичной подаче напряжения на нагрузку в ней происходят интенсивные переходные электромагнитные процессы, поэтому целесообразно, чтобы электромагнитные процессы в нагрузке прошли при меньшем приложенном напряжении. Для этой цели предусматривается блокировка основного преобразователя "напряжение - частота" 9 с помощью элемента задержки 10, который блокирует выход основного преобразователя 9 на определенное время, величина которого подбирается в зависимости от нагрузки.
Таким образом, в начальный период работы устройство работает с неизменным (максимальным) углом управления под управлением только синхроимпульсов от датчиков 5. В этом режиме датчик нулевого значения тока 2 (токовый нуль-орган) никакого влияния на работу схемы не оказывает. Как только снимается блокировка с выхода преобразователя "напряжение - частота" 9, устройство переходит на работу по принципу токовой синхронизации с плавающей точкой отсчета (по команде датчиков тока 2). В этом случае, если меняется угол нагрузки φ (см. фиг.1), то меняется и положение точки отсчета. В этом случае при достижении током какой-либо фазы, питающей сети (например, фазы А) нулевого значения, запираются вентили 1 и на первичной обмотке трансформатора датчика нулевого значения тока 2 появляется высокое напряжение. Это приводит к открытию транзистора 16 и появлению на управляющем входе логического ключевого элемента 4 (входе инвертора 23) и разрешающем входе "V" счетчика тактовых импульсов 3 сигнала логического нуля. Счетчик 3 устанавливается в исходное состояние сигналом логического нуля, поступающего на установочный R-вход счетчика с выхода элемента
И-НЕ 22 (или что тоже вход 1 элемента И-НЕ 21), который устанавливается в нулевое состояние при появлении нулевого синхроимпульса датчика напряжения собственной фазы, поступающего на вход 2 элемента И-НЕ 21, который устанавливает на выходе сигнал логической единицы, который, попадая на вход 1 элемента И-НЕ 22, при наличии на остальных входах 2 и 3 единичных сигналов, устанавливает на выходе элемента И-НЕ 22 сигнал логического нуля, который, попадая на R-вход счетчика 3, и устанавливает последний в исходное состояние, счетчик тактовых импульсов 3 обнулится и с этого момента начнет заполняться импульсами преобразователя "напряжение - частота" 9; частота следования импульсов зависит от величины входного сигнала (суммарного сигнала управления). Сигнал логического нуля токового нуль-органа 2, попадая на вход 1 инвертора 23, приводит к появлению на его выходе сигнала логической единицы, который устанавливается на 1 входе элемента И-НЕ 24 и готовит последний к срабатыванию. Таким образом, выходной элемент логического ключевого элемента 4 подготовлен к срабатыванию. При заполнении счетчика 3 импульсами преобразователя 9 на его выходе появляется сигнал логического нуля, который, попадая на вход 2 элемента И-НЕ 22, приводит к появлению на его выходе сигнала логической единицы (переключается триггер, собранный на элементах И-НЕ 21 и 22), который, попадая на вход 2 элемента И-НЕ 24, приводит к появлению его на выходе сигнала логического нуля, из которого формируется импульс управления одним из вентилей 1 (в соответствующем канале управления - фазе). Включение одного из вентилей 1 взывает исчезновение высокого потенциала на первичной обмотке трансформатора и базе транзистора 16 соответственно, вследствие чего транзистор 16 закрывается и на управляющем входе логического ключевого элемента 4 (инвертор 23) и разрешающем входе счетчика 3 появляется сигнал логической единицы. На выходе инвертора 23 появляется логический нуль, который, попадая на вход 1 элемента И-НЕ 24, устанавливает на его выходе сигнал логической единицы. Происходит снятие сигнала управления с управляющих электродов вентилей 1 (в соответствующем канале управления - фазе питания двигателя). Через полпериода тока питающей сети весь цикл повторяется снова. Таким образом, происходит работа устройства с фазовым углом управления.
В случае, когда значение сигнала от источника управляющего напряжения 13 превысит порог срабатывания порогового элемента 12, то на его выходе формируется сигнал логического нуля. Если это произошло при закрытых вентилях 1, то на входе инвертора 23 появляется сигнал логического нуля, который приводит к появлению на его выходе логической единицы, которая, попадая на вход 1 элемента И-НЕ 24, подготавливает его к работе. Появление на входе 3 элемента И-НЕ 22 сигнала логического нуля вызывает появление на его выходе логической единицы, которая попадает на вход 2 элемента И-НЕ 24, вызывает появление на его выходе сигнала логического нуля, из которого формируется сигнал на управление одним из вентилей 1. Сигнал с выхода счетчика 3 после его заполнения придет на выход 2 элемента И-НЕ 22 позже и только подтвердит состояние логической единицы на выходе элемента И-НЕ 22. Включение любого из вентилей 1 запрет транзистор 16 датчика 2 нулевого значения тока, и сигнал с его выхода изменит состояние инвертора 23 и снимет тем самым сигнал управления с вентильной группы 1. Сигнал от счетчика 7 придет еще позже и, попадая логическим нулем на выход 3 элемента И-НЕ 22, подтвердит состояние логической единицы на выходе этого элемента. Изменений в работу схемы это не вносит.
В случае, если после заполнения счетчика 3 нет срабатывания порогового элемента 12 и включение вентилей 1 не произойдет (по какой-либо причине), то вентили 1 должны будут включиться по сигналу дополнительного счетчика 7 с максимальным углом открытия вентилей 1. При снижении уровня сигнала источника 13 ниже порога срабатывания порогового элемента 12 устройство вновь начинает работать с фазовым углом управления.
Функциональный преобразователь 14 работает следующим образом: достижение напряжением, например фазы А питающей сети, нулевого значения приводит к появлению на выходе компаратора 17 датчика 5 сигнала, адекватного логическому нулю, который, попадая на вход 2 элемента И-НЕ 27, устанавливает на его выходе сигнал логической единицы, который, попадая на вход 1 элемента И-НЕ 28, устанавливает на его выходе сигнал логического нуля, поскольку на 2 входе элемента И-НЕ 28 присутствует в этот момент тоже сигнал логической единицы. Сигнал логического нуля на выходе элемента И-НЕ 28, попадая на 1 вход элемента И-НЕ 27, удерживает на его выходе сигнал логической единицы, несмотря на то, что на выходе 2 элемента И-НЕ 27 сигнал стал соответствовать логической единице. С некоторым запаздыванием на входе 2 элемента И-НЕ 28 появится сигнал логического нуля от датчика 2 нулевого значения тока, который установит на выходе элемента И-НЕ 28 сигнал логической единицы, который попадает на вход 1 элемента И-НЕ 27, на втором входе которого к этому времени установлен тоже сигнал логической единицы, это приводит к появлению на выходе элемента И-НЕ 27 сигнала логического нуля. Так как выход триггера подключен к первому входу корректирующего усилителя 36 через интегрирующую цепочку, состоящую из элементов 29 и 30 и 31, на его входе будет поддерживаться средний уровень сигнала за период его изменения (на выходе элемента И-НЕ 27). Скорость изменения этого сигнала зависит от угла нагрузки φ и параметров интегрирующей цепи.
Таким образом, напряжение на элементе 30 является функцией угла нагрузки φ и зачастую имеет нелинейный характер. Линеаризация этой зависимости производится корректирующим усилителем 36, в цепь обратной связи которого включен блок нелинейности на элементах 33, 34 и 35.
Характеристика зависимости угла нагрузки φ от частоты вращения для асинхронных двигателей или от времени для других видов нагрузки различна. Приведение характеристик к общему виду осуществляется изменением коэффициента усиления корректирующего усилителя 36 резистором 31. Смещение нуля усилителя необходимо для того, чтобы нулевому значению, например, скорости вращения двигателя соответствовало нулевое значение напряжения на выходе усилителя 36, которая устанавливается резистором 32.
Выходной сигнал с функционального преобразователя 14 "интервал времени - напряжение", пропорциональный углу нагрузки φ, поступает на второй вход функционального преобразователя 38 "ток двигателя - угол нагрузки φ", на первый вход которого поступает сигнал, пропорциональный текущему значению тока двигателя, с выхода датчика тока 37. В преобразователе 38 происходит сравнение угла нагрузки φ, соответствующего предыдущей рабочей точке, и текущего значения и в зависимости от их разницы с учетом величины тока нагрузки вырабатывается сигнал "отрицательной" или "положительной" обратной связи.
Рассмотрим несколько вариантов нагрузки.
Двигатель работает в I-й зоне (фиг.1). При уменьшении нагрузки на двигатель текущее значение тока, измеряемое датчиком 37, становится меньше значения тока, соответствующего предыдущей рабочей точке, при этом cosφ уменьшается, угол φ увеличивается и, чтобы вернуть двигатель в оптимальное состояние (по энергетике), необходимо уменьшить приложенное к двигателю напряжение, следовательно, обратная связь должна быть "отрицательной" (1).
На следующем шаге произойдет увеличение тока двигателя по сравнению с предыдущей рабочей точкой, при этом cosφ увеличивается, угол φ уменьшается и, чтобы вернуть двигатель в оптимальное состояние (по энергетике), необходимо уменьшить приложенное к двигателю напряжение, следовательно, обратная связь должна быть "отрицательной" (1).
Совершенно другая ситуация при работе двигателя во II-й зоне. При плавном или резком набросе нагрузки двигатель переходит из зоны I в зону II (фиг.1), предположим, что ни cosφ, ни угол φ при этом не изменяется, но значение тока в новой рабочей точке становится больше, чем его значение в предыдущей точке. Для того чтобы вернуть двигатель в оптимальное состояние (по энергетике), необходимо увеличить приложенное к двигателю напряжение. Составляющая Vocφ в формуле (1) при этом должна поменять знак на обратный, при этом обратная связь должна быть "положительной" и выражение (1) в этом случае примет вид:

Аналогично необходимо реагировать при работе двигателя во II-й зоне, независимо от того, увеличивается или уменьшается при этом cosφ и угол φ, обратная связь должна быть "положительной".
Таким образом, управляющее напряжение, соответствующее оптимальному режиму работы приводного электродвигателя, по предлагаемому техническому решению выглядит следующим образом:

Знак перед составляющей Vocφ в выражении (3) выбирается в соответствии с величиной cosφ и нагрузкой двигателя. Следовательно, введение датчика тока и функционального преобразователя "ток двигателя - угол нагрузки φ", выполняющего сравнение угла нагрузки φ двигателя по величине с учетом значения тока нагрузки и вырабатывающего сигнал отрицательной или положительной обратной связи в соответствии с выражением (3) (предлагаемым алгоритмом), позволяет обеспечить работу устройства и приводного электродвигателя во всех режимах и оптимизировать выходные параметры электропривода, сохранив все преимущества управления нагрузкой с фиксированной и плавающей точкой отсчета.
Список литературы
1. Патент РФ №1319181. Устройство для управления углом отпирания вентилей. Н02М 1/08, 1993. 318-200, 1977.
2. Патент РФ №1769317. Устройство для управления углом отпирания вентилей. "АТИР" Н02М 1/08, 1993.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления углом отпирания вентилей | 1985 |
|
SU1319181A2 |
| Устройство для управления углом отпирания вентилей | 1989 |
|
SU1686644A1 |
| Устройство для управления углом отпирания вентилей | 1984 |
|
SU1192062A1 |
| СПОСОБ ТОРМОЖЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ ПЕРЕМЕННОГО ТОКА | 2009 |
|
RU2440663C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ И ПОДДЕРЖАНИЯ РЕЗОНАНСНЫХ РЕЖИМОВ КОЛЕБАНИЙ ВИБРАЦИОННОЙ МАШИНЫ С ПРИВОДОМ ОТ АСИНХРОННОГО ДВИГАТЕЛЯ | 2014 |
|
RU2589639C1 |
| Импульсный преобразователь с защитой от внутренних аварий | 1987 |
|
SU1411894A1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ДВИГАТЕЛЕМ (ВАРИАНТЫ) | 1997 |
|
RU2143761C1 |
| Цифровое устройство автоматического определения момента входа, выхода и наличия металла в валках клети прокатного стана | 1976 |
|
SU655443A1 |
| СПОСОБ ЦИФРОВОГО УПРАВЛЕНИЯ УГЛОВОЙ СКОРОСТЬЮ ТРЕХФАЗНОГО ВЕНТИЛЬНОГО ДВИГАТЕЛЯ С УЧЕТОМ ЗНАКА ПРОТИВО-ЭДС | 2010 |
|
RU2438158C1 |
| Способ управления электроприводом "Каскад ФАЗО | 1986 |
|
SU1494189A1 |
Изобретение относится к области электротехники и может быть использовано для управления одно- и многофазными электродвигателями переменного тока. Техническим результатом является оптимизация выходных параметров электропривода во всех режимах работы. Устройство управления электродвигателем переменного тока дополнительно снабжено датчиком тока двигателя и функциональным преобразователем "датчик тока - угол нагрузки φ", выполняющим сравнение тока двигателя по величине с учетом значения угла нагрузки и вырабатывающим сигнал отрицательной или положительной обратной связи в соответствии с предлагаемым алгоритмом. Результирующее управляющее напряжение, соответствующее оптимальному режиму работы приводного электродвигателя, может быть выражено уравнением Vy=Vз±Vосφ. Знак перед составляющей Vocφ в уравнении выбирается в соответствии с алгоритмом, приведенным в материалах заявки. 2 ил.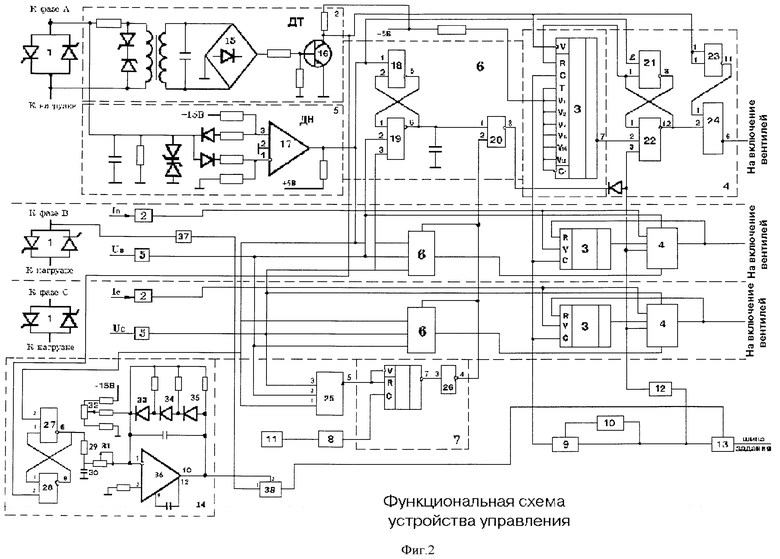
Устройство для управления электродвигателем переменного тока, содержащее группы параллельно включенных вентилей (1), равных числу фаз сети, вход каждой группы вентилей (1) соединен с фазой сети, а выход - с соответствующей фазой электродвигателя, датчики (2) нулевого значения тока, каждый из которых подключен параллельно соответствующей группе вентилей (1) в фазе, датчики (5) нулевого значения напряжения для синхронизации управляющих импульсов, логический переключающий элемент (6) в каждом канале управления, состоящий из элемента совпадения (20) и двух элементов И-НЕ (18) и (19), второй вход элемента И-НЕ (18) и первый вход элемента И-НЕ (19) перекрестно соединены с их выходами, первый вход элемента И-НЕ (18), второй и третий входы элемента И-НЕ (19) логического переключающего элемента (6) подключены к выходам датчиков (5) нулевого значения напряжения соответствующих фаз, счетчик (3) тактовых импульсов, логический ключевой элемент (4), выполненный на трех элементах И-НЕ (21), (22) и (24) и инверторе (23), вход которого подключен к выходу датчиков (2) нулевого значения тока, выход инвертора (23) подключен к первому входу элемента И-НЕ (24), выходы элементов И-НЕ (21) и (23) соединены перекрестно с их первыми входами, вход дополнительного счетчика (7) тактовых импульсов соединен с выходом элемента совпадения (25), первый, второй и третий входы которого соединены с выходами датчиков (5) нулевого значения напряжения в фазах электродвигателя, два преобразователя (8) и (9) "напряжение - частота", источник (11) первичного пуска, пороговый элемент (12), функциональный преобразователь (14) "интервал времени - напряжение", состоящий из RS-тригтера, собранного на двух элементах И-НЕ (27) и (28), выходы которых перекрестно соединены с их первыми входами, выход RS-триггера через интегрирующую цепочку (29, 30 и 31) соединен с первым входом корректирующего усилителя (36), второй вход элемента И-НЕ (28) соединен с выходом датчика (2) нулевого значения тока, второй вход элемента И-НЕ (27) соединен с выходом датчика (5) нулевого значения напряжения этого же канала управления, второй вход корректирующего усилителя (36) через резистор соединен с заземляющей шиной, выход корректирующего усилителя (36) охвачен цепью обратной связи с нелинейным блоком, состоящим из диодов (33), (34) и (35), сопротивлений и емкости, выход корректирующего усилителя (36) является выходом функционального преобразователя (14) "интервал времени - напряжение", первый вход элемента совпадения (25), второй вход элемента И-НЕ (27) функционального преобразователя (14) "интервал времени - напряжение" подключены к выходу датчика (5) напряжения, к которому подключен и первый вход элемента И-НЕ (18) логического ключевого элемента (6), первый вход элемента И-НЕ (18), второй и третий вход элемента И-НЕ (19) каждого логического переключающего элемента (6) соединены одноименными входами между собой и одноименными входами элемента совпадения (25), выход которого подключен к установочному входу дополнительного счетчика (7), счетный вход которого соединен с выходом преобразователя (8) «напряжение - частота», вход которого соединен с выходом источника (11) первичного пуска, выход дополнительного счетчика (7) тактовых импульсов соединен со вторым входом элемента совпадения (20) логического переключающего элемента (6), первый вход которого подключен к выходу элемента И-НЕ (19) логического переключающего элемента (6), выходы элемента совпадения (20) и порогового элемента (12) подключены к третьему входу элемента И-НЕ (22) логического ключевого элемента (4) каждого канала управления, второй вход которого соединен с выходом счетчика тактовых импульсов (3), разрешающий вход которого соединен с выходом датчика (2) нулевого значения тока, установочный R-вход соединен с первым входом элемента И-НЕ (21) логического ключевого элемента (4), второй вход которого подключен к выходу датчика (5) нулевого значения напряжения, счетный вход счетчика (3) тактовых импульсов соединен с выходом преобразователя (9) «напряжение - частота», запрещающий вход которого подключен к выходу элемента задержки (10), вход которого вместе с входом преобразователя (9) напряжение-частота и порогового элемента (12) соединен с выходом источника (13) управляющего напряжения, выход счетчика (3) тактовых импульсов подключен ко второму входу элемента И-НЕ (22) логического ключевого элемента (4) каждого канала, выход элемента И-НЕ (22) подключен ко второму входу элемента И-НЕ (24), с выхода которого подается команда на включение вентилей (1), которые подают напряжение на электродвигатель, отличающееся тем, что, с целью оптимизации параметров и повышения надежности электродвигателя во всех режимах работы, оно дополнительно снабжено датчиком (37) тока электродвигателя и функциональным преобразователем (38) «датчик тока - угол нагрузки φ», выполняющим сравнение угла нагрузки φ по величине с учетом значения тока двигателя и вырабатывающего сигнал отрицательной или положительной обратной связи в соответствии с выражением Vy=Vз±Vocφ, первый вход которого соединен с выходом датчика (37) тока, а второй его вход соединен с выходом функционального преобразователя (14) «интервал времени - напряжение», выход функционального преобразователя (38) «датчик тока - угол нагрузки φ» соединен с соответствующим входом источника (13) управляющего напряжения, где Vy - напряжение управления, Vз - напряжение задания, Vocφ - напряжение обратной связи.
| ФАЗОСДВИГАЮЩЕЕ УСТРОЙСТВО | 2006 |
|
RU2320071C1 |
| SU 1769317 A1, 15.10.1992 | |||
| Устройство для управления углом отпирания вентилей | 1989 |
|
SU1686644A1 |
| Датчик частоты вращения долота при турбинном бурении | 1988 |
|
SU1587182A1 |
| US 7023166 B1, 04.04.2006 | |||
| DE 4310485 A1, 06.10.1994 | |||
| JP 57126290 A, 08.05.1982 | |||
| Абсорбционная холодильная установка | 1979 |
|
SU823776A1 |
| Способ получения циклических ацеталей | 1951 |
|
SU101559A1 |

