1. Область техники
Изобретение относится к электротехнике и может быть использовано для управления одно- и многофазными асинхронными электродвигателями переменного тока, в том числе при управлении от нереверсивного бесконтактного пускателя. При этом простой перевод тиристорного регулятора напряжения (ТРН) в выпрямительный режим, при котором по обмоткам статора АД (асинхронного электродвигателя) протекает выпрямленный ток с малой постоянной составляющей, не обеспечивает эффективного торможения. А при статическом моменте на валу двигателя <0,5 Мн, (4), где Mн - номинальный момент на валу двигателя, остановки двигателя не происходит, так как первая гармоника выпрямленного тока в этом случае препятствует торможению двигателя.
2. Уровень техники
Известен способ управления многофазными асинхронными электродвигателями переменного тока, при котором регулирование скорости (торможение) осуществляют с использованием электромагнитной энергии ротора [1].
Известен способ торможения асинхронного электродвигателя, при котором частоту коммутации вентилей, образующих однополупериодную схему выпрямления, вначале процесса торможения снижают в целое число раз, а при уменьшении скорости вращения до половины частоту коммутации вентилей восстанавливают до частоты сети [2].
При этом гармоническая составляющая выпрямленного тока, частота которого меньше частоты сети, на высоких скоростях вращения двигателя создает режим рекуперативного торможения от постоянной составляющей тока, обеспечивая замедление привода. Кроме того, при торможении с частично затухщим полем ротора уменьшается знакопеременная составляющая момента двигателя. Восстановление частоты коммутации вентилей до частоты сети в процессе торможения необходимо для исключения возможности «застревания» двигателя на промежуточной скорости. Указанное переключение производят в функции времени или скорости. Интенсивность торможения регулируют посредством фазового управления углом отпирания вентилей. Однако данный способ торможения асинхронного электродвигателя имеет существенные недостатки:
- малая интенсивность торможения;
- низкая точность торможения;
- слабое использование накопленной энергии в роторе и, как следствие, низкий к.п.д. двигателя в режиме торможения.
Наиболее близким по технической сути к предложению является способ торможения асинхронного электродвигателя, при котором в обмотки статора подают однополупериодный выпрямленный ток, измеряют фазы напряжения сети и ЭДС электродвигателя, сравнивают их по величине и в момент их совпадения подают в обмотки статора однополупериодный выпрямленный ток. Таким образом, торможение асинхронного электродвигателя однополупериодным выпрямленным током позволяет повысить начальный (первичный) момент торможения за счет использования энергии ротора [3].
Однако данное техническое решение имеет существенные недостатки:
- низкая интенсивность торможения;
- процесс торможения практически неуправляем;
- слабое использование накопленной энергии в роторе, низкий к.п.д. двигателя в режиме торможения.
3. Раскрытие изобретения
Цель изобретения - увеличение эффективности торможения электродвигателя переменного тока, повышение к.п.д. двигателя в режиме торможения за счет использования электромагнитной энергии ротора в период торможения. Способ торможения реализуется следующей последовательностью операций:
1) отключают эл. двигатель от питающей сети (отключают обмотки статора от сети);
2) подают однополупериодный выпрямленный ток в статорную обмотку от питающей сети и создают неподвижное электромагнитное поле статорной обмотки;
3) определяют момент прохождения этого однополупериодного выпрямленного тока от питающей сети (сетевого тока) через нуль;
4) подают дополнительную энергию (скольжения ротора) в обмотку статора за счет открытия дополнительных (шунтирующих полупроводниковых элементов) в статорной обмотке, пропускающих ток по статорной обмотке от наведенной ЭДС вращения ротора;
5) измеряют суммарный ток в статорной обмотке от питающей сети и ток, наведенный от ЭДС вращения ротора;
6) сравнивают фактический ток торможения (суммарный - от сети и от наведенной ЭДС вращения ротора) с эталонным значением, и, в случае его отклонения, изменяют угол управления дополнительными полупроводниковыми элементами или изменяют величину дополнительных сопротивлений.
4) Осуществление изобретения
Поставленная цель достигается тем, что согласно предлагаемому способу торможения в обесточенные обмотки статора подают однополупериодный выпрямленный ток питающей сети и ток, наведенный от ЭДС вращения ротора, через дополнительные управляемые полупроводниковые элементы (тиристоры) и сопротивления, и создают тем самым дополнительный момент торможения, при этом величина тока, наведенного в статоре, контролируется датчиками тока и регулируется изменением угла управления дополнительными управляемыми полупроводниковыми элементами (тиристорами) и сопротивлениями. Дополнительная энергия торможения подается в статорную обмотку из роторной. Дополнительный ток торможения, наведенный в статорной обмотке от ЭДС вращения ротора, подают в момент равенства нулю тока, подаваемого в статорную обмотку от питающей сети.
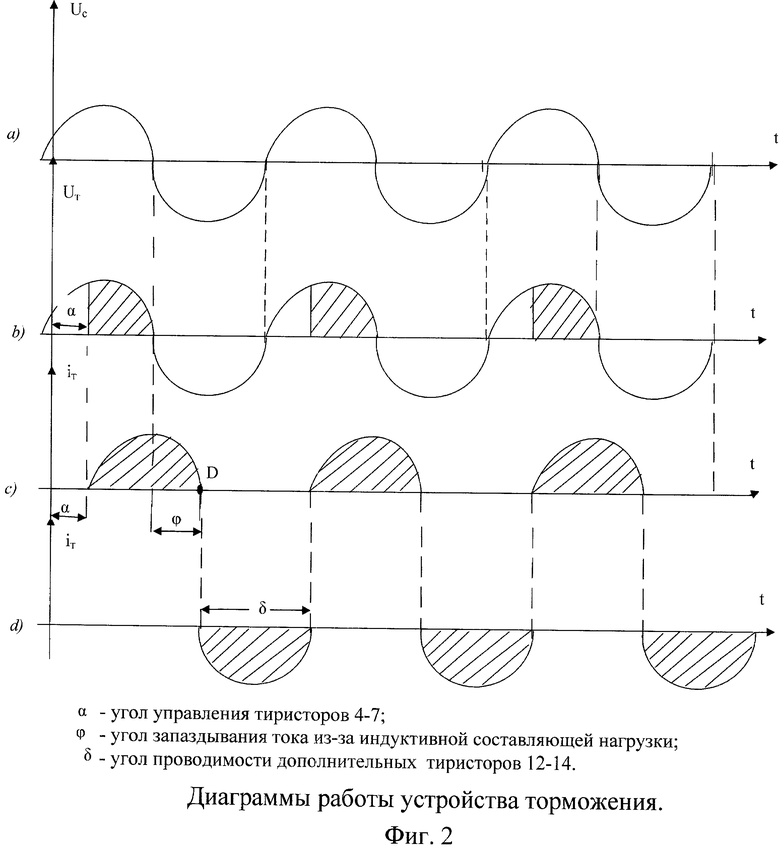
На фиг.1 изображена блок-схема устройства, реализующего предлагаемый способ, на фиг.2 - диаграммы его работы.
Устройство, реализующее данный способ торможения (фиг.1), состоит из электродвигателя 1, силовых тиристоров 2-7, блока синхронизации 8, фазосдвигающего устройства 9, блока управления 10, блока сравнения 11, дополнительных шунтирующих тиристоров 12-14 и ограничивающих сопротивлений 15-17, датчиков тока 18-20. При этом в двигательном режиме участвуют в работе силовые тиристоры 2-7, а в тормозном - тиристоры 4-7, дополнительные тиристоры 12-14 предназначены для шунтирования обмоток статора в режиме торможения, сопротивления 15-17 ограничивают ток торможения. Блок 8 синхронизации синхронизирует работу устройства и выделяет синхронизирующие импульсы для блока 9 импульсно-фазового управления, с помощью которого устанавливается угол управления дополнительными тиристорами 12-14 и регулируется интенсивность торможения (путем изменения угла управления тиристорами 12-14). Блок управления 10 устанавливает порядок работы тиристоров в определенной последовательности. В блоке сравнения 11 происходит сравнение текущего значения тока торможения с заданным эталоном и вырабатывается команда на изменение величины тока торможения, а также фиксируется момент прохождения тока статора через ноль. Тиристоры 12-14 шунтируют (замыкают) обмотку статора в режиме торможения. Сопротивления 15-17 ограничивают ток торможения, датчики тока 18-20 измеряют величину тока, протекающего по обмоткам статора.
Устройство, реализующее предлагаемый способ, работает следующим образом. После подачи команды «стоп» тиристоры 2-7 закрываются (снимается сигнал управления с электродов управления, что приводит к их закрытию). После закрытия тиристоров 2-7 (что подтверждается датчиками тока 18-20) подается команда на открытие тиристоров 4-7 и в обмотку статора подается однополупериодный выпрямленный ток от сети, в момент прохождения этого тока через нуль (фиг.2,c, точка D) подается команда на открытие тиристоров 12-14 с некоторым углом управления (для установления заданного (эталонного) тока торможения). По обмоткам статора начинает протекать однополупериодный выпрямленный ток, наведенный ЭДС вращения ротора (фиг.2,d). Таким образом, по обмоткам статора одновременно протекают однополупериодный выпрямленный ток от сети (фиг.2,c) и ток, наведенный от ЭДС вращения ротора (фиг.2,d), который замкнут через тиристоры 12-14 и сопротивления 15-17 на землю. В этом случае асинхронная машина представляет собой обращенный синхронный генератор. Суммарный ток создает постоянное магнитное поле, которое и тормозит вращающийся ротор двигателя. В режиме торможения статор создает неподвижное в пространстве магнитное поле, а ротор наводит ЭДС в обмотке статора. Создается тормозной момент с выделением энергии торможения частично в роторе на его активном сопротивлении и частично за его пределами на сопротивлениях 15-17. Двигатель по существу работает в режиме обращенного асинхронного генератора и образует тормозной момент. При этом энергия торможения частично выводится из ротора за пределы двигателя и рассеивается на дополнительных сопротивлениях 15-17. Таким образом, фактически однополупериодный выпрямленный ток торможения от сети и от ЭДС вращения ротора протекает по обмотке статора приблизительно все 360°, из них большее время протекает ток торможения, наводимый электромагнитным полем ротора. Следовательно, на торможение расходуется больше энергии ротора, чем берется из сети. Так происходит торможение двигателя до полной остановки. В момент перехода в двигательный режим работы открытие тиристоров 2-7 приводит к тому, что тиристоры 12-14 автоматически закрываются, так как на их катоды поступает положительный потенциал напряжения сети. Во время торможения блок 11 сравнения непрерывно вырабатывает сигнал рассогласования между заданным эталоном и текущим значением тока торможения. Сигнал рассогласования поступает в блок 10, в котором вырабатывается сигнал, определяющий угол открытия, при котором суммарный ток торможения остается постоянным и равным эталонному значению (Iтор.=const), в результате ток торможения остается постоянной величиной на все время торможения).
Таким образом, предлагаемый способ торможения использует энергию электромагнитного поля ротора с выводом части энергии торможения за пределы двигателя на все время торможения, что увеличивает интенсивность и к.п.д. двигателя в режиме торможения и позволяет регулировать его время.
Заявителем не выявлены ссылки, содержащие информацию об идентичны технических решениях, что позволяет сделать вывод о его соответствии критерию «новизна».
Заявленное предложение обеспечивает требуемый технический результат за счет признаков, связанных с проявлением новых свойств объекта. По мнению заявителя это свидетельствует о соответствии заявленного технического решения критерию «изобретательский уровень».
Литература
1. Патент РФ №1494189, кл. H02P 7/36, 1993 г.
2. Авторское свидетельство СССР №59469, кл. H02P 3/24, 1978.
3. Авторское свидетельство СССР №890538, кл. H02P 3/24, 1981.
4. Мейстель A.M. Динамическое торможение приводов асинхронными двигателями. - М.-Л.: Энергия, 1967.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО ПУСКА И ТОРМОЖЕНИЯ ЭЛЕКТРОПРИВОДОВ ОТ АВТОНОМНОГО ИСТОЧНИКА ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ СОИЗМЕРИМОЙ МОЩНОСТИ | 2014 |
|
RU2596165C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2361357C2 |
| Однофазный вентильный электродвигатель | 1985 |
|
SU1339790A1 |
| Устройство для управления асинхроннымТРЕХфАзНыМ элЕКТРОдВигАТЕлЕМ | 1979 |
|
SU813638A1 |
| НАГРУЖАЮЩЕЕ УСТРОЙСТВО СТЕНДА ДЛЯ ИСПЫТАНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ | 1991 |
|
RU2032889C1 |
| АСИНХРОННЫЙ ВЕНТИЛЬНЫЙ КАСКАД | 2011 |
|
RU2474951C1 |
| Способ торможения асинхронного электродвигателя | 1980 |
|
SU955466A1 |
| Устройство для управления асинхронным электродвигателем с фазным ротором | 1978 |
|
SU698106A1 |
| СПОСОБ ПУСКА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2014 |
|
RU2572097C1 |
| Электропривод переменного тока | 1986 |
|
SU1387159A1 |
Предложен способ торможения электродвигателя переменного тока, позволяющий повысить эффективность торможения и увеличить к.п.д. электродвигателя в режиме торможения, при котором в обмотку статора электродвигателя дополнительно подают ток, наводимый ЭДС вращения ротора, величина которого (тока) контролируется датчиками тока и регулируется изменением угла проводимости дополнительных полупроводниковых элементов. Повышение к.п.д. двигателя в режиме торможения достигается за счет использования электромагнитной энергии ротора в период торможения, причем подачу дополнительной энергии ротора осуществляют в момент равенства нулю однополупериодного выпрямленного тока, подаваемого в статорную обмотку из питающей сети. Согласно предлагаемому способу торможения в обесточенные обмотки статора подают вначале однополупериодный выпрямленный, ток от питающей сети и в момент прохождения этого тока через нуль подают однополупериодный выпрямленный ток наведенный от ЭДС вращения ротора, через дополнительный управляемый полупроводниковый элемент и сопротивление. Суммарный однополупериодный выпрямленный ток создает момент торможения, при этом величина тока, наведенного в статоре от ЭДС вращения ротора контролируется датчиками тока и регулируется изменением угла управления полупроводниковых элементов. 2 з.п. ф-лы, 2 ил.
1. Способ торможения электродвигателя переменного тока, например асинхронного электродвигателя с короткозамкнутым ротором, при котором в обмотку статора подают однополупериодный выпрямленный ток, отличающийся тем, что, с целью повышения эффективности торможения и увеличения к.п.д. электродвигателя в режиме торможения, в обмотку статора электродвигателя дополнительно подают ток, наводимый ЭДС вращения ротора, величина которого контролируется датчиками тока и регулируется изменением угла проводимости дополнительных полупроводниковых элементов.
2. Способ торможения электродвигателя переменного тока по п.1, отличающийся тем, что подачу дополнительного тока торможения производят в момент прохождения через нуль однополупериодного выпрямленного тока, подаваемого из сети.
3. Способ торможения электродвигателя переменного тока по п.1, отличающийся тем, что суммарный ток торможения поддерживается постоянным весь период торможения.
| Способ торможения асинхронного электродвигателя | 1979 |
|
SU890538A1 |
| Способ торможения с самовозбуждением трехфазного асинхронного электродвигателя | 1987 |
|
SU1436253A1 |
| Способ динамического торможения вентильного электродвигателя | 1985 |
|
SU1317629A1 |
| УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОГО ТОРМОЖЕНИЯ ТРЕХФАЗНОГО АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2002 |
|
RU2227364C2 |
| JP 62288810 A, 15.12.1987 | |||
| DE 3421151 A1, 13.12.1984. | |||

