Изобретение относится к железнодорожному транспорту.
Известно устройство для измерения расстояния между рельсами по заявке РФ на изобретение №2003131043. Устройство содержит два лазерных датчика. Способ заключается в сканировании рельсов и сравнении результатов измерения расстояния между ними с допустимыми значениями.
Известно устройство для бесконтактного измерения поперечного профиля и расстояния между рельсами пути по патенту РФ на изобретение №2255873, прототип способа и устройства.
Это устройство бесконтактного измерения поперечного профиля или расстояния между рельсами пути обеспечивает измерение при помощи сканирующих лучей двух лазерных датчиков, расположенных на подвижной платформе над рельсами, профиля рельса и расстояния до него и внесение этих величин в компьютерную базу данных в зависимости от пройденного расстояния, и определение отклонений от заданных значений. Устройство содержит два лазерных датчика, закрепленных над рельсами на платформе и компьютер, к которому они подключены. Система содержит датчик оборотов колеса платформы, выполняющий функцию измерения пройденного пути.
Недостатком этой системы является ее ограниченные функциональные возможности при диагностировании железнодорожных путей, т.к. не определяют продольный и поперечный уклоны участка пути.
Задача создания изобретения - расширение повышения точности определения местоположения платформы и расширение функциональных возможностей системы.
Решение указанных задач достигнуто в устройстве для контроля рельсами железнодорожного пути, содержащем установленные на тележке датчик пройденного пути и датчик перемещения для определения расстояния между рельсами, соединенные электрическими связями с контроллером, который соединен с процессором, и блок памяти, тем, что согласно изобретению тележка содержит соединенную с платформой при помощи шарнирной тяги измерительную рейку с опорным и измерительным колесами, измерительное колесо подпружинено в сторону, противоположную опорному колесу, и установлено на оси, которая выполнена с возможностью осевого перемещения и контактирует с датчиком перемещения, шарнирные тяги содержат оси, с которыми связаны датчики углового поворота, соединенные электрическими связями с процессором. Устройство может содержать, по меньшей мере, один акселерометр, соединенный электрическими связями с контроллером. Устройство может содержать магнетометр, соединенный электрической связью с процессором. Устройство может содержать приемник системы глобального дистанционного позиционирования, например ГОЛОНАСС, подключенный к процессору.
За последние несколько лет большую популярность в мире завоевали системы глобального позиционирования (определения точного местоположения) GPS. Это действительно очень перспективный рынок. Объем мирового рынка услуг глобального позиционирования в 2003 г. составил $500 млн, а по прогнозу Ovum, в 2005 г. его объем составит $9.75 млрд (при 376 млн абонентов). Некоторым основам функционирования систем глобального позиционирования и их применению в мире и посвящена данная статья. Первые системы глобального позиционирования GPS (Global Positioning System) разрабатывались исключительно для военных целей. Глобальная навигационная система GPS предназначена для передачи навигационных сигналов, которые могут одновременно приниматься во всех регионах мира. Инициатором создания GPS-системы стало Министерство Обороны США.
Используемая сейчас аббревиатура GPS появилась позднее, когда система стала использоваться не только для военных, но и для мирных целей. Первая штатная орбитальная группировка системы разворачивалась с июня 1989 г. по март 1994 г. На орбиту были выведены 24 навигационных спутника Block II. Окончательно GPS-система была введена в эксплуатацию в 1995 г. В настоящее время она эксплуатируется и обслуживается Министерством Обороны США. В состав GPS-системы входят 3 основных сегмента: космический, наземный и пользовательский. Космический сегмент состоит из 28 автономных спутников, равномерно распределенных по орбитам с высотой 20350 км (для полнофункциональной работы системы достаточно 24 спутников). Каждый спутник излучает на 2 частотах специальный навигационный сигнал, в котором зашифровано 2 вида кода. Один из них доступен лишь немногим пользователям, среди которых, конечно же, военные и федеральные службы США. Кроме этих 2 сигналов спутник излучает и третий, информирующий пользователя о дополнительных параметрах (состоянии спутника, его работоспособности и др.). Параметры орбит спутников периодически контролируются сетью наземных станций слежения (всего 5 станций, находящихся в тропических широтах), с помощью которых (не реже 1-2 раз в сутки): вычисляются баллистические характеристики, регистрируются отклонения спутников от расчетных траекторий движения, определяется собственное время бортовых часов спутников, осуществляется мониторинг исправности навигационной аппаратуры и др. При этом для обнаружения отказов оборудования спутников с помощью наземных станций обычно требуется несколько часов. Третий сегмент GPS-системы - это GPS-приемники, выпускаемые и как самостоятельные приборы (носимые или стационарные), и как платы для подключения к ПК, бортовым компьютерам и другим аппаратам. Основные возможности GPS-системы (при наличии приемника GPS-сигнала):
- определение местонахождения мобильного абонента;
- определение наиболее короткого и удобного пути до пункта назначения;
- определение обратного маршрута;
- определение скорости движения (максимальной, минимальной, средней);
- определение времени в пути (прошедшего и сколько потребуется еще) и др.
Основы функционирования систем GPS и ГОЛОНАСС
Теория дальнометрии основана на вычислении расстояния распространения радиосигнала от спутника к приемнику по временной задержке. Если знать время распространения радиосигнала, то пройденный им путь легко вычислить, просто умножив время распространения радиосигнала на скорость света.
Каждый спутник GPS-системы непрерывно генерирует радиоволны 2 частот - (L1=1575.42 МГц и L2=1227.60 МГц). Навигационный сигнал представляет собой фазоманипулированный псевдослучайный PRN-код (Pseudo Random Number code). PRN-код бывает 2 типов. Первый - С/А-код (Coarse Acquisition code - грубый код) используется в гражданских приемниках. Он позволяет получать лишь приблизительную оценку местоположения, поэтому и называется «грубым» кодом. С/А-код передается на частоте L1 использованием фазовой манипуляции псевдослучайной последовательности длиной 1023 символа. Защита от ошибок обеспечивается посредством кода Гоулда. Период повторения С/А-кода - 1 мс. Другой код - Р (precision code - точный код) - обеспечивает более точное вычисление координат, но доступ к нему ограничен. В основном, Р-код предоставляется военным и (иногда) федеральным службам США (например, для решения задач геодезии и картографии). Этот код передается на частоте L2 с применением сверхдлинной псевдослучайной последовательности с периодом повторения 267 дней. Этот код доступен в принципе и гражданским лицам. Но алгоритм его обработки гораздо более сложен, поэтому и аппаратура стоит дороже. В свою очередь, частота L1 модулируется как С/А, так и Р-кодом. В сигнале GPS может присутствовать и так называемый Y-код, являющийся зашифрованной версией Р-кода (в военное время система шифровки может меняться).
В основе определения координат GPS-приемника лежит вычисление расстояния от него до нескольких спутников, расположение которых считается известным (эти данные находятся в принятом с GPS-спутника «альманахе»). В геодезии метод вычисления положения объекта по измерению его удаленности от точек с заданными координатами называется «трилатерацией».
Если известно расстояние до одного спутника, то координаты приемника определить нельзя (он может находиться в любой точке сферы радиусом, описанной вокруг спутника). Пусть известна удаленность приемника от второго спутника. В этом случае определение координат также не представляется возможным - объект находится на окружности, которая является пересечением двух сфер. Расстояние до третьего спутника сокращает неопределенность в координатах до двух точек. Этого уже достаточно для однозначного определения координат - дело в том, что из двух возможных точек расположения приемника лишь одна находится на поверхности Земли (или в непосредственной близости от нее), а вторая, ложная, оказывается либо глубоко внутри Земли, либо очень высоко над ее поверхностью. Таким образом, для трехмерной навигации теоретически достаточно знать расстояния от приемника до 3 спутников.
Сущность изобретения поясняется на чертежах где:
- на фиг.1 приведена конструкция устройства,
- на фиг.2 приведена схема съема информации с блока памяти при помощи электрического разъема,
- на фиг.3 приведена схема съема информации при помощи приемно-передающего устройства и беспроводного канала связи,
- на фиг.4 приведена схема измерения углов наклона измерительной рейки,
- на фиг.5 приведена электрическая схема устройства с приемником системы глобального дистанционного позиционирования,
- на фиг.6 приведена электрическая схема устройства с приемно-передающим устройством,
- на фиг.7 приведена схема измерения продольного наклона рельсового пути,
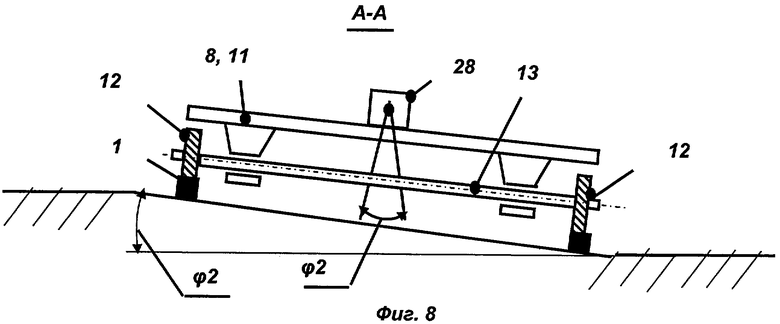
- на фиг.8 приведена схема поперечного наклона рельсового пути (платформы тележки), разрез А-А фиг.7,
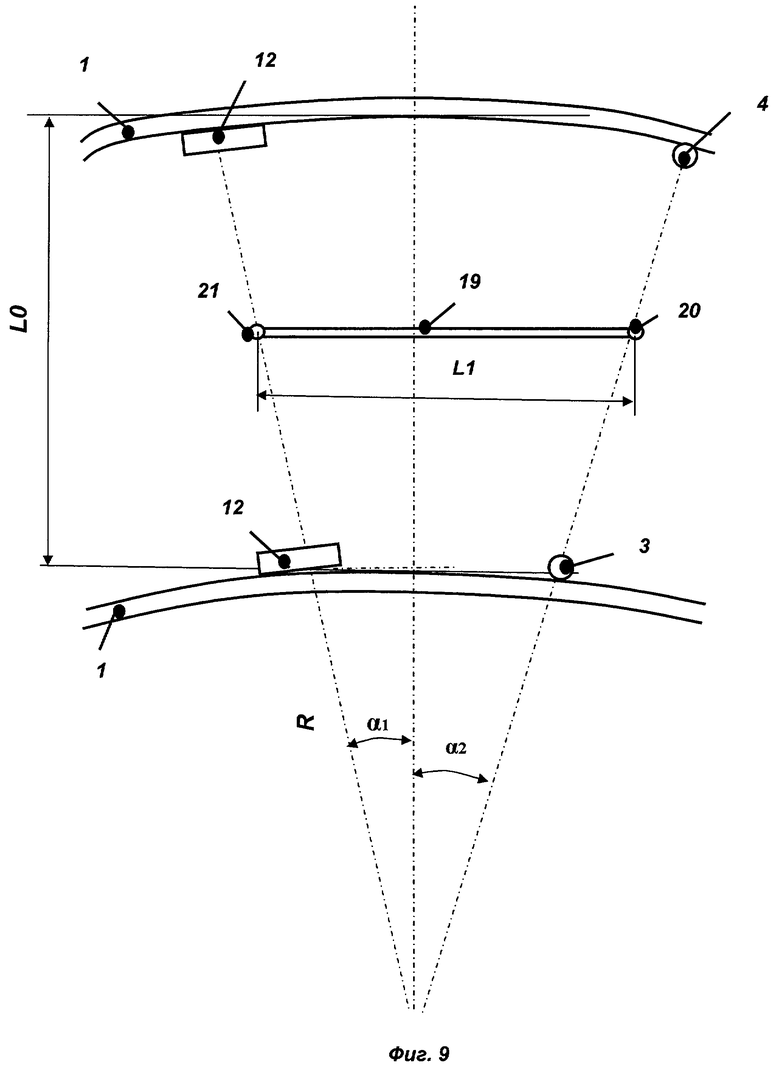
- на фиг.9 приведена схема измерения радиуса округления рельсов.
Устройство (фиг.1-9) предназначено для измерения расстояния между рельсами 1. Оно содержит размещенные на измерительной рейке 2 опорное колесо 3, измерительное колесо 4, установленное на оси 5 и подпружиненное пружиной 6 в сторону, противоположное опорному колесу 3. Ось 5 измерительного колеса 4 выполненна с возможностью осевого перемещения и контактирует с датчиком перемещения 7. Кроме того, устройство содержит одноосную тележку 8 с рукояткой ручного привода 9, прикрепленной при помощи шарнира 10 к платформе 11. Одноосная тележка 8 содержит два колеса 12, установленных на оси 13. На платформе 11 размещены электронные компоненты устройства, в том числе контроллер 14, процессор 15, присоединенный к нему электрическими связями 16, и блок памяти 17, к которому присоединен внешний электрический разъем 18 (фиг.2).
Измерительная рейка 2 и платформа 8 соединены тягой 19, на концах которых закреплены оси 20 и 21, имеющие возможность проворота в измерительной рейке 2 и платформе 8. С осями 20 и 21 связаны датчики угла поворота 22 и 23, соединенные электрическими связями 16 с контроллером 14. На платформе 11 установлен датчик пройденного пути 24, связанный механически с одним колесом 12. С контроллером 14 соединены датчик пройденного пути 24 и датчик перемещения 7.
На платформе 11 установлен блок питания 25 и выключатель 24. Блок питания электрическими связями 16 соединен со всеми электронными компонентами, требующими для работы электроэнергию, в том числе с процессором 15 (фиг.1). На платформе 1 могут быть установлены два акселерометра 27 и 28 (фиг.3), соединенных электрическими связями 16 с контроллером 14. На платформе также может быть установлен магнетометр 29 (фиг.4), соединенный электрической связью 16 с контроллером 14. На платформе 11 установлен датчик пройденного пути 29 (фиг.1)
На платформе 11 может быть установлен приемник системы глобального дистанционного позиционирования 30, с антенной 31, подсоединенной к его входу. В качестве системы глобального позиционирования может быть применена система ГЛОНАСС или GPS. Для этой же цели может быть применен прибор другой системы позиционирования, имеющий аналогичные функции, например Галилео или Компас. В систему голобального дистанционного позиционирования входят соединенные радиоканалом 32 спутники 33 (фиг.1 и 5). На платформе 11 также может быть установлено приемно-передающее устройство 34, к которому подсоединена антенна 35 (фиг.6), и удаленное контрольное устройство 36, содержащее стационарное приемно-передающее устройство 36, к которому подсоединена антенна 38 и стационарный сервер 39.
При установке одноосной платформы 11 на рельсы 1 включают выключатель 26 и электроэнергия с блока питания 25 через выключатель 26 подается на все электронные компоненты, в том числе на процессор 15. С датчика перемещения 7, датчика пройденного пути 24, датчиков угла поворота 22 и 23 и с акселерометров 27 и 28 и магнетометра 29 (при их наличии) информация передается на контроллер 14 и далее на процессор 15. После проведения необходимых расчетов информация передается на блок памяти 17. В первую очередь, по показаниям датчика перемещения 7 определяют расстояние между рельсами 1, потом углы из наклона φ1 φ2, и азимутальное положение участка железнодорожного пути, если в составе устройства предусмотрены соответственно акселерометры 27 и 28 и магнетометр 29.
Эти данные записываются в блок памяти 17 с привязкой к пройденному расстоянию. Расстояние, пройденное платформой с точностью 2 м, определяется датчиком пройденного пути 24 и периодически контролируется системой глобального дистанционного позиционирования. Приемник глобального дистанционного позиционирования 30 принимает сигнал не менее чем с трех спутников 33 системы и по ним определяет местоположение платформы 11 с точностью 2 м. Эти данные передаются на контроллер 14 и далее в процессор 15 и блок памяти 17.
Далее в процессоре 15 производится сравнение расстояние между рельсами 3 с предельно допустимыми минимальным и максимальным значением. При отклонении подается сигнал, например звуковой. Одновременно акселерометры 27 и 28 измеряют продольный и поперечный наклон рейки (фиг.7 и 8). Эти значения также сравниваются с предельно допустимыми, и если они выходят за пределы нормы, подается звуковой или визуальный сигнал оператору. При необходимости можно передавать базу данных с платформы 11 в течение всего времени ее перемещения в процессе контроля для профилактики железнодорожного пути через приемно-передающие устройства 34 и 37 и их антенны 35 и 38 по радиоканалу 32 на удаленный сервер (фиг.6).
Расчет радиуса округления рельсового пути может быть выполнен по методике (фиг.9), приведенной ниже. Замеренные датчиками 22 и 23 углы поворота осей 21 и 22 могут незначительно различаться. В идеальном случае, без значительного уменьшения точности расчетов можно считать, что эти углы равны α1=α2, поэтому вычисляют среднее значение угла поворота измерительной рейки:

Рассчитывают средний радиус округления пути:
Радиус округления внешнего рельса можно определить по формуле:
R=Rcp+0,5 L0.
Радиус округления внутреннего рельса пути можно определить по формуле:
R=R-0,5 L0.
где L0 - измеренное расстояние между рельсами.
Применение изобретения позволило:
1. Создать легкую малогабаритную одноосную железнодорожную тележку с ручным приводом для контроля пути, обеспечивающую высокую точность измерений и расширенные функциональные возможности.
2. Расширить функциональные возможности системы за счет дополнительного измерения углов радиуса округления рельсов и наклона платформы.
4. Точнее привязать всю полученную информацию к пройденному пути за счет его более точного измерения местоположения тележки. Это обеспечивается введением в процессор и блок памяти первоначального положения тележки при помощи системы глобального дистанционного позиционирования, например ГЛОНААС, GPS, Галилео или Компас.
5. Значительно более точно определять текущие координаты платформы с устройством за счет применения системы глобального дистанционного позиционирования.
6. Полностью автоматизировать процесс измерения и вывести результаты на стационарную аппаратуру (компьютер или флеш-память) через специальный электрический разъем (считать из блока памяти) или передать их на удаленный сервер или периодически, по мере накопления информации или непрерывно в процессе измерения по беспроводному каналу связи.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДЛЯ КОНТРОЛЯ РЕЛЬСОВ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2010 |
|
RU2419567C1 |
| СПОСОБ КОНТРОЛЯ ПОПЕРЕЧНОГО ПРОФИЛЯ И РАССТОЯНИЯ МЕЖДУ РЕЛЬСАМИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И ВАГОН-ПУТЕИЗМЕРИТЕЛЬ | 2010 |
|
RU2418705C1 |
| ЗЕНИТНАЯ РАКЕТА | 2012 |
|
RU2477446C1 |
| СВЕРХЗВУКОВОЙ РЕАКТИВНЫЙ СНАРЯД | 2007 |
|
RU2350893C2 |
| ЗЕНИТНАЯ РАКЕТА | 2012 |
|
RU2484418C1 |
| СВЕРХЗВУКОВОЙ РЕАКТИВНЫЙ СНАРЯД | 2007 |
|
RU2348894C1 |
| СИСТЕМА ОРИЕНТАЦИИ В ПРОСТРАНСТВЕ ЛЮДЕЙ С НАРУШЕНИЕМ ЗРИТЕЛЬНЫХ ФУНКЦИЙ | 2005 |
|
RU2299052C2 |
| СВЕРХЗВУКОВОЙ РЕАКТИВНЫЙ СНАРЯД | 2007 |
|
RU2342628C1 |
| ЗЕНИТНАЯ РАКЕТА | 2012 |
|
RU2477445C1 |
| АВИАЦИОННАЯ ТОРПЕДА | 2007 |
|
RU2345317C1 |






Изобретение относится к железнодорожному транспорту. Устройство для контроля рельсов железнодорожного пути содержит установленные на тележке датчик пройденного пути и датчик перемещения для измерения расстояния между рельсами, контроллер, процессор и блок памяти. Тележка содержит соединенную с платформой при помощи шарнирной тяги измерительную рейку с опорным и измерительным колесами. Измерительное колесо подпружинено в сторону, противоположную опорному колесу, и установлено на оси, которая выполнена с возможностью осевого перемещения и контактирует с датчиком перемещения. Шарнирная тяга содержит оси, с которыми связаны датчики углового поворота, соединенные электрическими связями с процессором. Изобретение обеспечивает повышение точности измерения. 4 з.п. ф-лы, 9 ил.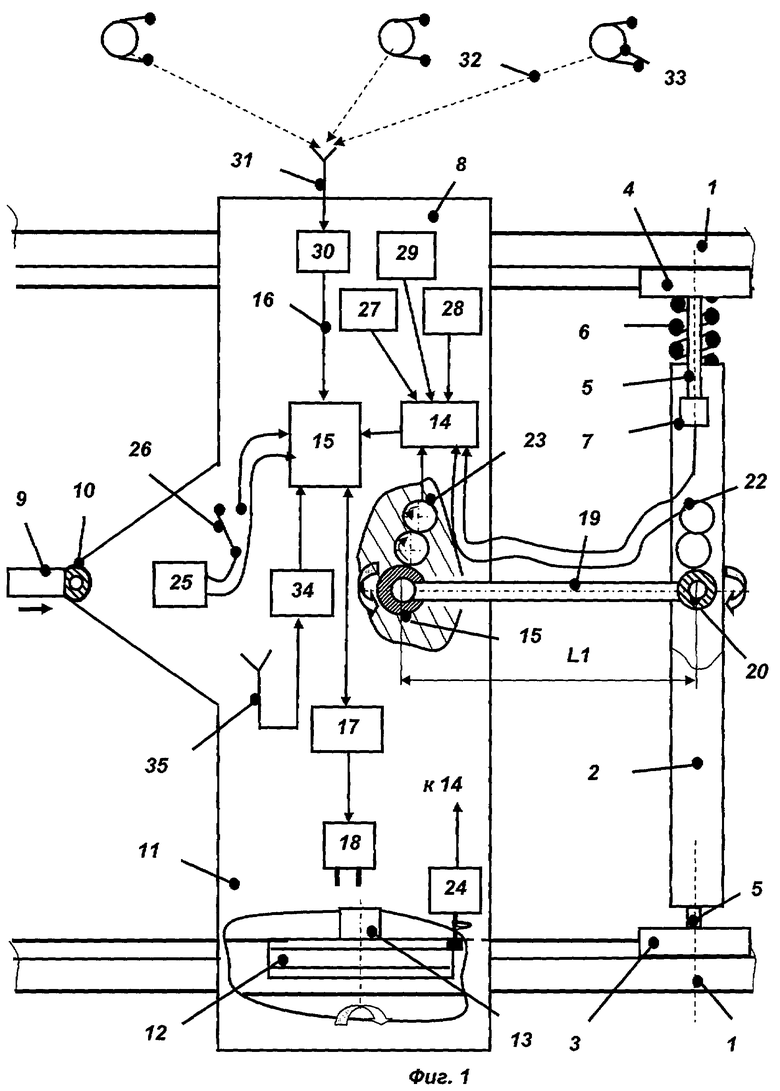
1. Устройство для контроля рельсов железнодорожного пути, содержащее установленные на тележке датчик пройденного пути и датчик перемещения для измерения расстояния между рельсами, соединенные электрическими связями с контроллером, который соединен с процессором, и блок памяти, отличающееся тем, что тележка содержит соединенную с платформой при помощи шарнирной тяги измерительную рейку с опорным и измерительным колесами, измерительное колесо подпружинено в сторону, противоположную опорному колесу, и установлено на оси, которая выполнена с возможностью осевого перемещения и контактирует с датчиком перемещения, шарнирная тяга содержит оси, с которыми связаны датчики углового поворота, соединенные электрическими связями с процессором.
2. Устройство по п.1, отличающееся тем, что оно содержит, по меньшей мере, один акселерометр, соединенный электрическими связями с контроллером.
3. Устройство по п.1 или 2, отличающееся тем, что оно содержит магнетометр, соединенный электрической связью с процессором.
4. Устройство по п.1 или 2, отличающееся тем, что оно содержит приемник системы глобального дистанционного позиционирования, например ГОЛОНАСС, подключенный к процессору.
5. Устройство по п.4, отличающееся тем, что оно содержит приемник системы глобального дистанционного позиционирования, например ГОЛОНАСС, подключенный к процессору.
| RU 2007129588 A, 10.02.2009 | |||
| МОБИЛЬНЫЙ КОНТРОЛЬНО-ВЫЧИСЛИТЕЛЬНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 1995 |
|
RU2066645C1 |
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИИ РЕЛЬСОВОГО ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2256575C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ ПАРАМЕТРОВ РЕЛЬСОВОГО ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2261302C2 |
| Вагон-путеизмеритель для измерения положения пути в плане и ширины колеи | 1978 |
|
SU753968A1 |

