Изобретение относится к железнодорожному транспорту, в частности к методам непрерывной регистрации пространственного положения рельсовой колеи при диагностике пути, проектно-изыскательских и других видах работ с использованием вагонов-путеизмерителей, выправочно-рихтовочных машин, путеизмерительных тележек.
Известны способы определения пространственного положения железнодорожного пути с использованием установленных на движущемся вдоль железнодорожного пути транспортном средстве приборов, осуществляющих при перемещении транспортного средства измерение пройденного пути, стрел изгиба рельса относительно базовой линии в вертикальной и горизонтальной плоскостях (просадка и рихтовка), положение пути в поперечном уровне, ширину рельсовой колеи (например, авторское свидетельство СССР №432262, Е 01 В 35/06, авторское свидетельство СССР №121137, Е 01 В 35/00).
Данные технические решения не позволяют определять положение пути относительно проектных координат, а также определять длинные неровности, превышающие длину базы измерения.
Известны способ и устройство для его реализации, позволяющие определение пространственного положения рельсового пути путем непрерывной регистрации первичной информации, снимаемой с размещенных на движущейся по рельсовому пути транспортной платформе датчика курса, гироскопического датчика угла наклона по курсу (тангажа), гироскопического датчика наклона пути в поперечном профиле (датчика крена), датчика пройденного пути, датчика межрельсового расстояния и датчика погружения транспортной платформы. Информацию с указанных датчиков преобразовывают в цифровую форму, передают в вычислительный блок, преобразовывают получаемые данные в пространственные координаты рельсового пути и фиксируют их в регистрирующем блоке [патент РФ №2026448, Е 01 В 35/00].
Недостатком данного технического решения являются ограниченные возможности определения пространственного положения, в частности способ не позволяет определять рихтовку и просадки, т.е. взаимное положение отрезков пути в вертикальной и горизонтальной плоскостях.
Задачей изобретения является создание способа определения пространственного положения рельсового пути и устройства для его осуществления с расширенными функциональными возможностями, позволяющими одновременно с определением пространственных координат определять взаимное положение отрезков пути в вертикальной и горизонтальной плоскостях (рихтовку и просадку).
Поставленная задача решается тем, что в способе определения пространственного положения рельсовой колеи, включающем регистрацию информации с датчиков межрельсового расстояния, пройденного пути, текущего курсового угла, продольного и поперечного уклона при движении транспортного средства и вычисление по этим данным текущих координат рельсовой колеи, согласно изобретению регистрацию курсового угла и продольного уклона с указанных датчиков и определение текущих координат Xi, Yi, Hi осуществляют по одной из рельсовых ниток относительно любого исходного направления в горизонтальной плоскости, с шагом измерения l
где Δd - допустимая погрешность измерения стрелы изгиба;
dmax - максимальное значение стрелы изгиба.
При этом дополнительно для каждого заданного участка пути Pi (измерительной базы) по измеренным координатам его крайних точек i0 и in вычисляют координаты точки iср, соответствующей середине прямолинейного отрезка (хорды), соединяющего эти точки, как среднее значение этих координат
где Xi(изм), Yi(изм), Hi(изм) - текущие координаты рельсовой нити в точках i0 и in;
n - количество единичных приращений пути (шагов измерений l) на измерительной базе Рi; при этом 
По разности между вычисленной координатой указанной точки (лежащей на середине, соединяющей крайние точки заданной измерительной базы отрезка прямой) и измеренной координатой соответствующей точки определяют значение стрелы изгиба в соответствии с выражениями

где δiг - стрела изгиба в горизонтальной плоскости;
δiв - стрела изгиба в вертикальной плоскости.
Координаты второй рельсовой нити Х'i(изм), Y'i(изм), Н'i(изм) определяют в соответствии с выражениями
где Хi(изм), Yi(изм), Нi(изм) - текущие координаты первой рельсовой нити;
lш - ширина колеи;
а значение стрел изгиба в плане δiг' (рихтовка) и стрел изгиба в профиле δiв' вычисляют аналогично первой рельсовой нити в соответствии с выражениями

где 
Поставленная задача решается также тем, что устройство для определения пространственных параметров рельсового пути содержит ходовую тележку, включающую опорное колесо и расположенные на одной оси над одной из рельсовых нитей первое и второе измерительные колеса и мерное колесо, при этом опорное колесо связано с измерительными колесами установленной под углом 90° относительно направления движения штангой, на которой установлен датчик ширины колеи, на мерном колесе смонтирован датчик пути, а на оси, связывающей измерительные колеса, установлен курсокреноуказатель, выходы датчика пути, датчика ширины колеи и курсокреноуказателя связаны через контроллер с компьютером.
На фиг.1 представлен общий вид устройства для реализации способа согласно изобретению; на фиг.2 - структурная схема измерений, осуществляемых при реализации изобретения; на фиг.3 представлены схемы определения стрел изгиба, поясняющие изобретение.
Устройство для реализации способа содержит ходовую тележку, включающую пару измерительных колес 1 и 2, опорное колесо 3 и мерное колесо 4. Колесо 3 связано с измерительными колесами 1, 2 штангой 5, установленной под углом 90° относительно направления движения. На штанге 5 установлен датчик 6 ширины колеи (например, индуктивный бесконтактный датчик типа 4Д-3). На мерном колесе 4 смонтирован датчик 7 пути (например, система ротор-статор с оптической системой счета импульсов (оптопара). На оси, связывающей колеса 1 и 2, установлен курсокреноуказатель 8, например типа СГККУ, представляющий собой гироскопическую систему, позволяющую одновременно определять курсовой угол α, продольный угол ϕ и поперечный уклон ϒ. Выходы датчиков 6, 7 и курсокреноуказателя 8 связаны с входами контроллера 9. Контроллер 9, выполненный на микропроцессоре (например, 68НС708дК1), осуществляет регистрацию информации с датчиков 6, 7, 8, преобразование этих сигналов в цифровой вид, первичную обработку и передачу данных в компьютер 10. Значение измерительной базы Р обусловливается видами проводимых работ и может составлять от 10 до 100 и более метров. Обычно это значение составляет 20 метров.
Способ согласно изобретению осуществляется следующим образом.
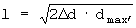
Максимально допустимый шаг измерения lmax определяется из установленной авторами эмпирической зависимости, обеспечивающей требуемую точность измерений способа за счет взаимного (пространственного) соответствия средних точек, лежащих на реальной измерительной базе Р и на прямой (хорде), соединяющей ее крайние точки i0 и in,
При этом если требуемая погрешность dmax измерения стрелы изгиба составляет 2 мм при максимальной стреле изгиба 100 мм, то значение шага измерения l должно быть не более 20 мм.
Таким образом, максимальное расстояние между точками с известными координатами при реализации данного способа будет определяться требуемой точностью измерений Δd и максимальной стрелой изгиба dmax.
При движении измерительных колес 1, 2 по одной из рельсовых нитей на каждой заданной измерительной базе Pi на исследуемом участке рельсового пути сигнал с датчика пути 7 поступает на контроллер 9 с шагом l, при этом опрашивается датчик ширины колеи 6 и датчик курса 8.
Сигналы датчиков 6, 7, 8, соответствующие ширине колеи lш, курсовому углу α, продольному ϕ поперечному углу ϒ, поступающие в контроллер 9, где преобразуются в цифровой вид, после чего передаются в компьютер 10. Компьютер 10 вычисляет с шагом l текущие координаты данной рельсовой нити. Текущие координаты Хi(изм), Yi(изм), Hi(изм) для рельсовой нити, на которой производились измерения (над которой установлен курсокреноуказатель 8 и датчик пути 7), вычисляются компьютером 10 в соответствии с выражениями
где Х0, Y0, Н0 - начальные (исходные) координаты;
α - азимут;
ϕ - продольный угол;
l - шаг измерений.
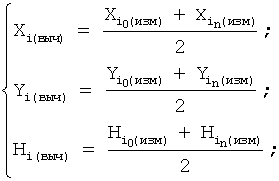
При этом последовательно на каждой измерительной базе  по измеренным координатам ее крайних точек i0 и in компьютер 10 вычисляет их средние значения
по измеренным координатам ее крайних точек i0 и in компьютер 10 вычисляет их средние значения 
Данные средние значения координат соответствуют координатам точки, лежащей на середине условной прямой (хорды), соединяющей точки i0 и in (фиг.3).
Далее вычисляются значения стрел изгиба в плане δiг (рихтовка) и значение стрел изгиба в профиле δiв (просадка) в соответствии с выражениями

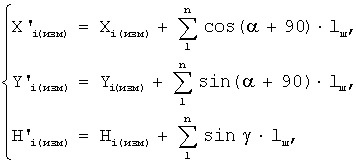
Координаты второй рельсовой нити Х'i(изм), Y'i(изм), Н'i(изм) вычисляют по формулам

где lш - ширина колеи;
γ - поперечный угол (возвышение рельса);
α - курсовой угол.
Значение стрел изгиба в плане δiг (рихтовка) и стрел изгиба в профиле δiв (просадки) вычисляют аналогично показанному выше, в соответствии с выражениями

Как видно, измерения согласно описанному способу осуществляются (могут осуществляться) без привязки к какой-либо системе координат. При необходимости определения (перевода) координат, определенных согласно описанному способу, в какую-либо конкретно заданную (например, государственную) систему координат, вычисляют коэффициент угловой ориентации Δβ

где  и
и  - измеренное значение приращения координат на отрезке пути
- измеренное значение приращения координат на отрезке пути 
например 1 км;
ΔXt и ΔYt - приращение координат на этом же участке пути S в выбранной, например государственной, системе координат (ΔXt и ΔYt могут быть получены, например, GPS-приемником).
После чего пересчет координат в новую (выбранную) систему координат осуществляют в соответствии с выражениями

где Xн и Yн - координаты в новой системе координат, например государственной;
Х0 изм, Y0 изм - координаты начальной точки.
Координаты (приращение координат) ΔXi(изм) и ΔYi(изм) определяется из выражения
Таким образом, техническое решение согласно изобретению позволяет определять пространственное положение рельсовой колеи в любой системе координат, определять отклонения пути от проектного положения, определять одновременно с пространственными координатами стрелы изгиба, просадки и рихтовку по каждой рельсовой нитке (в стандарте ЦП515 или любом другом) без ограничений по длине измерительной базы.
Использование изобретения в измерительной диагностической технике позволяет:
• определять проектное положение рельсовой колеи;
• использовать для определения геометрических параметров транспортные средства с короткой базой, например до 100 см;
• определять рихтовку и просадки путеизмерительными тележками;
• выполнять расчет стрел изгиба для выправочно-рихтовочных машин, вагонов-путеизмерителей и т.д., имеющих разные базы (длины хорд), в едином стандарте;
• выявлять длинные неровности (заводины), выполнять расчет пространственного положения рельсовой колеи относительно любого исходного направления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения пространственных координат и геометрических параметров рельсового пути и устройство для его осуществления | 2016 |
|
RU2628541C1 |
| Способ диагностики продольного профиля железнодорожных путей сортировочного парка | 2022 |
|
RU2779427C1 |
| СПОСОБ ИЗМЕРЕНИЙ ГОРИЗОНТАЛЬНЫХ НЕРОВНОСТЕЙ (РИХТОВКИ) И КРИВИЗНЫ В ПЛАНЕ РЕЛЬСОВЫХ НИТЕЙ | 2004 |
|
RU2276216C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭТАЛОННОЙ КООРДИНАТНОЙ МОДЕЛИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2287187C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОЙ КОЛЕИ | 1995 |
|
RU2123445C1 |
| СПОСОБ ИЗМЕРЕНИЯ И ИЗОБРАЖЕНИЯ ГЕОМЕТРИИ ПУТИ СИСТЕМЫ РЕЛЬСОВОГО ПУТИ | 2015 |
|
RU2682953C2 |
| СПОСОБ ТЕКУЩЕГО СОДЕРЖАНИЯ ИНФРАСТРУКТУРЫ ЖЕЛЕЗНЫХ ДОРОГ С ИСПОЛЬЗОВАНИЕМ ЦИФРОВОЙ МОДЕЛИ ПУТИ | 2011 |
|
RU2466235C2 |
| Способ выправки железнодорожного пути и устройство для его осуществления | 2023 |
|
RU2824765C1 |
| ОПТОЭЛЕКТРОННАЯ СИСТЕМА БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ В ДВИЖЕНИИ ГЕОМЕТРИЧЕСКИХ ХАРАКТЕРИСТИК ЖЕЛЕЗНОДОРОЖНОЙ КОЛЕИ. ОПТОЭЛЕКТРОННЫЙ ДАТЧИК БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ПОЛОЖЕНИЯ И ИЗНОСА РЕЛЬСА | 1995 |
|
RU2142892C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ | 1995 |
|
RU2074829C1 |

Изобретения относятся к железнодорожному транспорту, в частности к методам непрерывной регистрации пространственного положения рельсовой колеи. Способ определения пространственного положения рельсовой колеи включает регистрацию информации с датчиков межрельсового расстояния, пройденного пути, текущего курсового угла, продольного и поперечного уклона при движении транспортного средства и вычисление по этим данным текущих координат рельсовой колеи. Регистрация курсового угла и продольного уклона с указанных датчиков и определение текущих координат Xi, Yi, Hi осуществляют по одной из рельсовых ниток относительно любого исходного направления в горизонтальной плоскости, с шагом измерения 1. Для каждого заданного участка пути Pi по измеренным координатам его крайних точек i0 и in вычисляют координаты точки icp, соответствующей середине прямолинейного отрезка, соединяющего эти точки. По разности между вычисленной координатой указанной точки и измеренной координатой соответствующей точки определяют значение стрелы изгиба в горизонтальной δiг δiв и вертикальной плоскостях. Устройство для определения пространственных параметров рельсовых путей содержит ходовую тележку, включающую опорное колесо и расположенные на одной оси над одной из рельсовых нитей первое и второе измерительные колеса и мерное колесо. Опорное колесо связано с измерительными колесами установленной под углом 90° относительно направления движения штангой, на которой установлен датчик ширины колеи. На мерном колесе смонтирован датчик пути. На оси, связывающей измерительные колеса, установлен курсокреноуказатель. Выходы датчика пути, датчика ширины колеи и курсокреноуказателя связаны через контроллер с компьютером. Техническим результатом изобретений является расширение функциональных возможностей, позволяющих одновременно с определением пространственных координат определять взаимное положение отрезков пути в вертикальной и горизонтальной плоскостях (рихтовку и просадку). 2 н. и 1 з.п. ф-лы, 3 ил.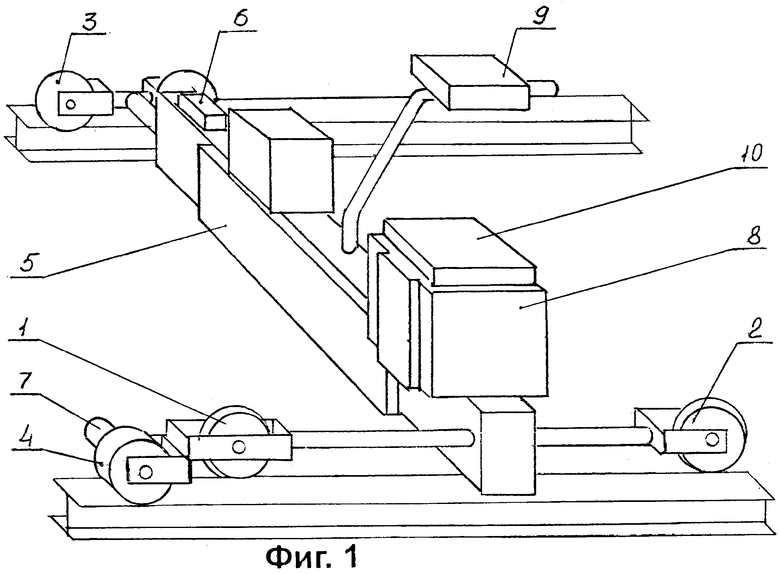
где Δd - допустимая погрешность измерения стрелы изгиба;
dmax - максимальное значение стрелы изгиба,
при этом дополнительно для каждого заданного участка пути Рi (измерительной базы), по измеренным координатам его крайних точек i0 и in вычисляют координаты точки icp, соответствующей середине прямолинейного отрезка (хорды), соединяющего эти точки, как среднее значение координат
где Хi(изм), Yi(изм)Нi(изм) - текущие координаты данной рельсовой нити в точках i0 и in;
n - количество единичных приращений пути (шагов измерений 1) на измерительной базе Pi, причем 
и по разности между вычисленной координатой указанной точки (лежащей на середине условной прямой соединяющей крайние точки заданной измерительной базы) и измеренной координатой соответствующей точки, лежащей на реальной измерительной базе, определяют значение стрелы изгиба в горизонтальной и вертикальной плоскости в соответствии с выражениями

где Хi(изм), Yi(изм), Hi(изм) - текущие координаты первой рельсовой нити;
lш - ширина колеи,
а значение стрел изгиба в плане δiг (рихтовка) и стрел изгиба в профиле δiв вычисляют в соответствии с выражениями

где
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ РЕЛЬСОВОГО ПУТИ | 1991 |
|
RU2026448C1 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО ИЗМЕРЕНИЯ ПЛАНА И ПРОДОЛЬНОГО ПРОФИЛЯ ПУТИ | 1973 |
|
SU432262A1 |
| Диагностика верхнего строения пути | |||
| М.: Транспорт, 1981, с.127-129, 178-182, рис.3.67, 3.126. | |||

