Область техники, к которой относится изобретение
Настоящее изобретение относится к способу и системе для определения относительного местоположения подвижных транспортных средств.
Уровень техники
Первичное транспортное средство может быть управляемым человеком или автоматическим транспортным средством. В случае если транспортное средство является управляемым человеком, водитель может использовать свое суждение и восприятие для вождения или управления транспортным средством в окружающей среде. В случае если транспортное средство является автоматическим, управлять транспортным средством в окружающей обстановке может система управления или система навигации. Одно или несколько вторичных транспортных средств могут проследить маршрут первичного транспортного средства согласованным способом для военного, сельскохозяйственного или коммерческого применения. Таким образом, существует потребность в поддержке желательной степени выравнивания и координации между первичным местоположением первичного транспортного средства и вторичными местоположениями одного или нескольких вторичных транспортных средств в течение определенного времени.
Раскрытие изобретения
Первичный приемопередатчик первичного транспортного средства передает первый сигнал передачи первому ретранслятору и второму ретранслятору, связанному с вторичным транспортным средством. Антенна первого ретранслятора и антенна второго ретранслятора связаны с опорными точками вторичного транспортного средства, которые расположены на некотором расстоянии друг от друга. После приема первого сигнала передачи первый ретранслятор передает второй сигнал передачи первому маяку первичного транспортного средства и первичному приемопередатчику. Антенна первичного приемопередатчика и антенна первого маяка связаны с опорными точками первичного транспортного средства, которые расположены на некотором расстоянии друг от друга. После приема первого сигнала передачи второй ретранслятор передает третий сигнал передачи первому маяку и первичному приемопередатчику. Процессор данных или блок оценки определяет времена прохождения, связанные с первым сигналом передачи, вторым сигналом передачи и третьим сигналом передачи. Процессор данных или блок оценки оценивает относительное местоположение первичного транспортного средства относительно вторичного транспортного средства на основании опорных точек первичного транспортного средства, опорных точек вторичного транспортного средства и определенных времен прохождения.
Краткое описание чертежей
Фиг.1 - блок-схема одного варианта осуществления системы для определения относительного местоположения (и ориентации) первичного транспортного средства по отношению к вторичному транспортному средству в соответствии с изобретением.
Фиг.2 - блок-схема другого варианта осуществления системы для определения относительного местоположения (и ориентации) первичного транспортного средства по отношению к вторичному транспортному средству.
Фиг.3 - иллюстративная диаграмма вида сверху вторичного транспортного средства, в целом, прослеживающего маршрут первичного транспортного средства.
Фиг.4 - блок-схема одного варианта осуществления способа определения относительного местоположения (и ориентации) первичного транспортного средства по отношению к вторичному транспортному средству.
Фиг.5 - блок-схема другого варианта осуществления способа определения относительного местоположения и ориентации первичного транспортного средства по отношению к вторичному транспортному средству.
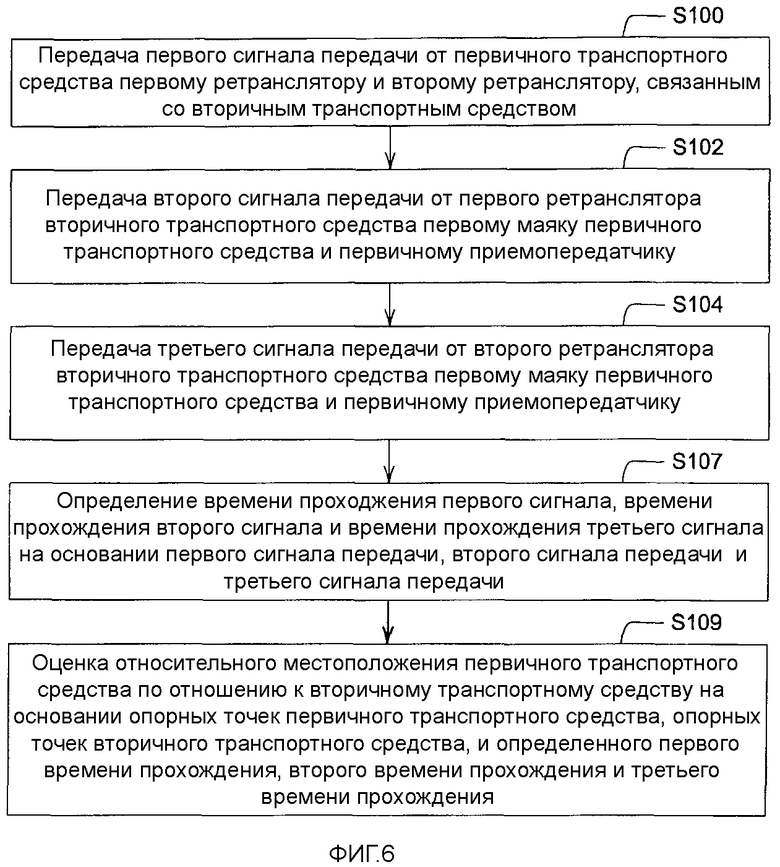
Фиг.6 - блок-схема еще одного варианта осуществления способа определения относительного местоположения и ориентации первичного транспортного средства по отношению к вторичному транспортному средству.
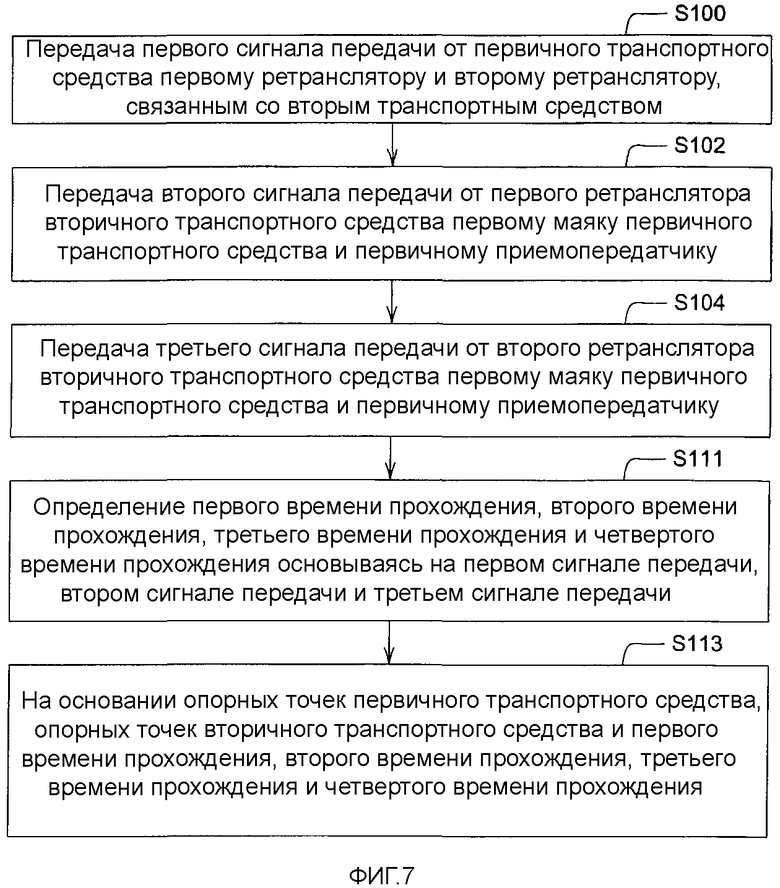
Фиг.7 - блок-схема другого варианта осуществления способа определения относительного местоположения (и ориентации) первичного транспортного средства по отношению к вторичному транспортному средству.
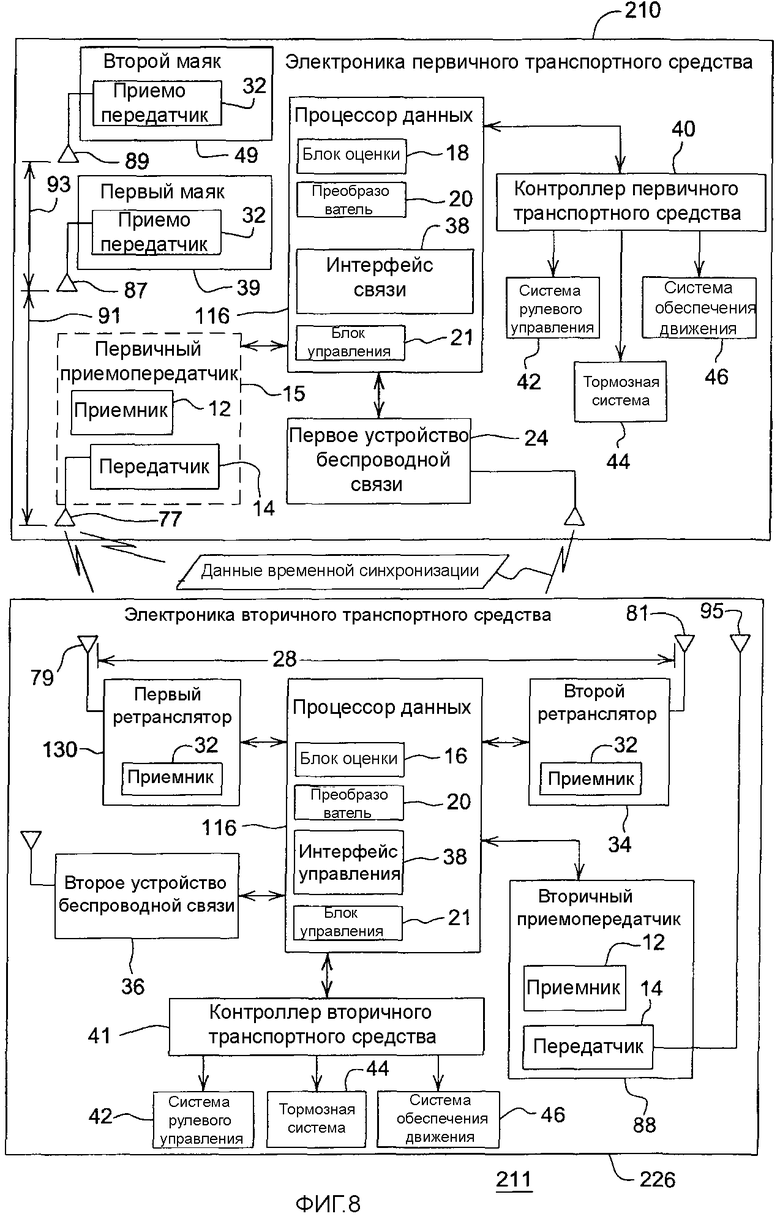
Фиг.8 - блок-схема другого варианта осуществления системы для определения относительного местоположения (и ориентации) первичного транспортного средства по отношению к вторичному транспортному средству.
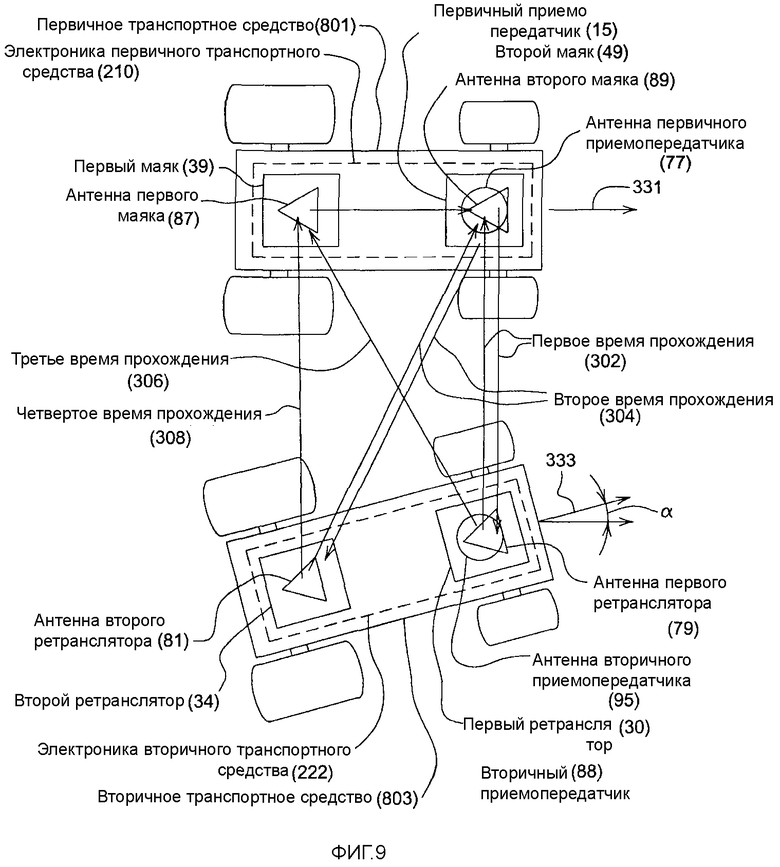
Фиг.9 - иллюстративная диаграмма вида сверху вторичного транспортного средства, в целом, прослеживающего маршрут первичного транспортного средства, совместимого с системой, изображенной на Фиг.8.
Осуществление изобретения
Используемый здесь термин «ретранслятор» или «маяк» означает устройство, которое после приема предназначенного ему электромагнитного сигнала испускает ответный электромагнитный сигнал, который может быть использован для обнаружения и определения местоположения первичного транспортного средства по отношению к вторичному транспортному средству. Ответный электромагнитный сигнал может представлять собой повтор или повторную широковещательную передачу принятого предназначенного ему электромагнитного сигнала (например, с использованием другого канала, частоты, временного интервала или закодированного сигнала), модифицированного или модулированного принятого сигнала на основе частоты или промежуточной частоте или вновь сформированного или модулированного электромагнитного сигнала. Несмотря на то что маяк или ретранслятор предпочтительно является активным, в альтернативных вариантах осуществления могут быть использованы пассивные повторители или пассивные маяки в случае соответствующей эффективной излученной мощности передачи и пространственного разнесения.
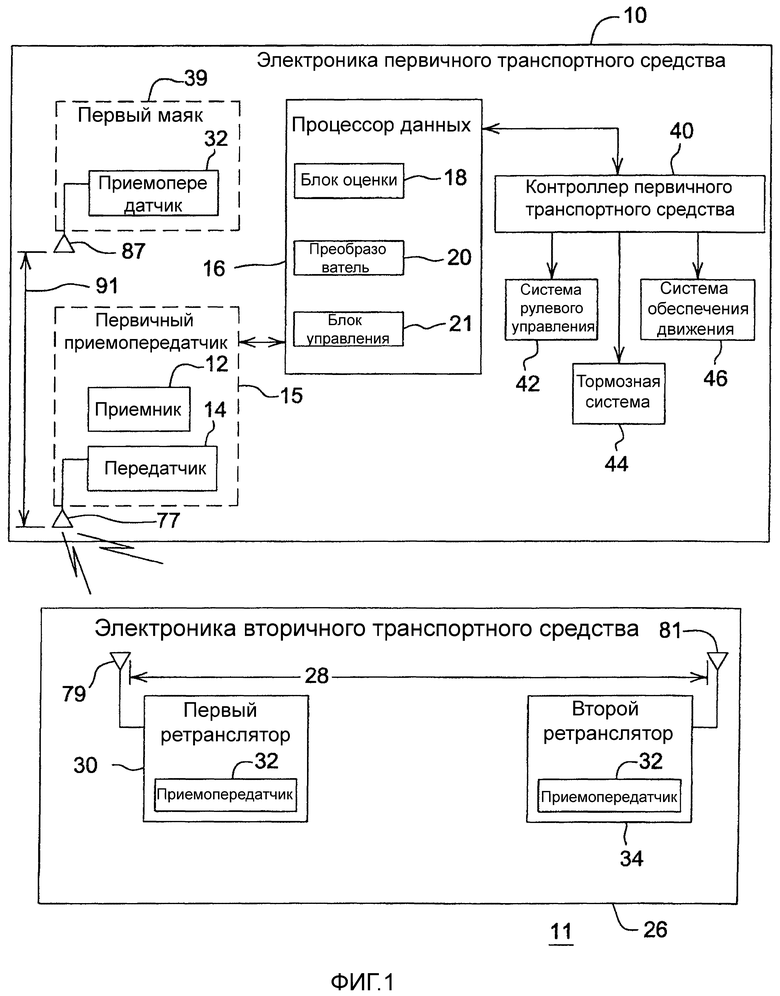
В соответствии с одним вариантом осуществления Фиг.1 иллюстрирует систему 11 для прослеживания местоположения (или местоположения и маршрута) первичного транспортного средства по отношению к вторичному транспортному средству. Местоположение транспортного средства может быть определено в двух- или трехмерных координатах (например, в декартовых координатах, полярных координатах, по широте или долготе). Курс или ориентация относятся к мгновенному направлению движения транспортного средства. Курс или ориентация могут быть определены (заданы) в отношении «точно на север», «магнитного севера», радиочастотного маяка, астрономического (неземного) маяка или другой опорной точки или азимута. В связи с тем что последовательность местоположений транспортного средства во времени устанавливает курс, скорость и ускорение транспортного средства, система 11 может быть приспособлена так, чтобы вторичное транспортное средство прослеживало курс, скорость и/или ускорение первичного транспортного средства или наоборот.
Система 11 содержит электронику 10 первичного транспортного средства и электронику 26 вторичного транспортного средства. Электроника 10 первичного транспортного средства связана с первичным транспортным средством, тогда как электроника 26 вторичного транспортного средства связана с вторичным транспортным средством.
Электроника 10 первичного транспортного средства содержит первичный приемопередатчик 15 и контроллер 40 первичного транспортного средства, которые взаимодействуют с процессором 16 данных. В свою очередь контроллер 40 первичного транспортного средства приспособлен для взаимодействия через логический канал передачи данных или физический канал передачи данных (например, шину передачи данных) с одним или несколькими из нижеследующих: системой 42 рулевого управления, тормозной системой 44 и системой 46 обеспечения движения. Электроника 10 первичного транспортного средства также содержит первый маяк 39. Первый маяк 39 связан с антенной 87 первого маяка, которая расположена отдельно от антенны 77 первичного приемопередатчика или антенны передатчика 14 посредством известного первичного пространственного разнесения 91. Антенна 87 первого маяка и антенна 77 первичного приемопередатчика связаны с опорными точками первичного транспортного средства (например, в двухмерной или трехмерной системе координат) по отношению к первичному транспортному средству (например, базовой системе координат транспортного средства).
Электроника 26 вторичного транспортного средства содержит первый ретранслятор 30 и второй ретранслятор 34. В одном варианте осуществления и первый ретранслятор 30 и второй ретранслятор 34 содержат приемопередатчик 32 или комбинацию передатчика и приемника. Антенна 79 первого ретранслятора и антенна 81 второго ретранслятора отделены посредством известного вторичного пространственного разнесения 28. Антенна 79 первого ретранслятора и антенна 81 второго ретранслятора связаны с опорными точками вторичного транспортного средства (например, в двухмерной или трехмерной системе координат) по отношению к вторичному транспортному средству (например, базовой системе координат транспортного средства). Каждый ретранслятор может применить выбираемую модуляцию или кодирование (например, фазовую модуляцию, частотную модуляцию или псевдослучайные нормы уровня шума (шумовые коды)) к его передающемуся или испускаемому сигналу для облегчения отличия одного сигнала передачи (например, сигнала передачи ретранслятора) от другого.
Ниже приведено более подробное описание электроники 10 первичного транспортного средства 10. Первый маяк 39 содержит приемопередатчик 32 или комбинацию передатчика и приемника. Первичный приемопередатчик 15 может содержать приемопередатчик или комбинацию приемника 12 и передатчика 14. И первый маяк 39 и первичный приемопередатчик 15 могут применить выбираемую модуляцию или кодирование к их передающемуся или испускаемому сигналу для облегчения отличия сигналов передачи друг от друга. В одном варианте осуществления процессор 16 данных может содержать блок 18 оценки, преобразователь 20 и блок 21 управления.
Контроллер 40 первичного транспортного средства может формировать сигналы управления для системы 42 рулевого управления, тормозной системы 44 и системы 46 обеспечения движения, которые являются совместимыми с планом прослеживания маршрута или желательным маршрутом. Например, сигналы управления могут содержать сигнал управления рулевым механизмом или информационное сообщение, которое является зависимым от времени и определяет угол поворота вала рулевого управления; сигнал управления тормозной системой или информационное сообщение, которое определяет степень торможения, гидравлического давления или фрикционного торможения, применяемого к тормозам; сигнал управления системой обеспечения движения или информационное сообщение, которое управляет режимом работы двигателя, расходом топлива, топливной системой, системой впрыска топлива, скоростью транспортного средства или ускорением транспортного средства. Если первичное транспортное средство приводится в движение посредством электропривода или электродвигателя, то сигнал управления системой обеспечения движения или информационное сообщение может управлять электрической энергией, электрическим током или электрическим напряжением для электропривода или электродвигателя.
Система 42 рулевого управления может содержать гидравлическую систему рулевого управления с электрическим управлением, реечное управление, приводимое в движение электроприводом, систему рулевого управления, использующую принцип Аккермана или другую систему рулевого управления. Тормозная система 44 может содержать гидравлическую тормозную систему с электрическим управлением или другую систему фрикционного торможения с электрическим управлением. Система 46 обеспечения движения может содержать внутренний двигатель внутреннего сгорания, гибридную систему электрического двигателя и двигателя внутреннего сгорания, систему электропривода или подобную.
В электронике 10 первичного транспортного средства первый маяк или первичный приемопередатчик 15 принимает сигнал передачи и предоставляет демодулированный или декодированный сигнал процессору 16 данных. Процессор 16 данных или блок 18 оценки оценивает относительное местоположение или размещение (или относительное местоположение и направление) вторичного транспортного средства по отношению к первичному транспортному средству на основании длительности времени прохождения, связанного с одним или несколькими нижеследующими траекториями прохождения сигнала между опорными точками (например, совпадающими с антеннами (77, 87, 79 и 81)) на транспортных средствах: (1) исходящая траектория прохождения сигнала с первичного транспортного средства на вторичное транспортное средство, (2) входящая траектория прохождения сигнала с вторичного транспортного средства на первичное транспортное средство, (3) исходящая траектория прохождения сигнала с вторичного транспортного средства на первичное транспортное средство или (4) входящая траектория прохождения сигнала с первичного транспортного средства на вторичное транспортное средство.
Процессор 16 данных может быть сконфигурирован несколькими разными способами. В первой конфигурации процессора 16 данных процессор 16 данных может обработать непосредственно истекшие времена прохождения, вместо их преобразования в соответствующие расстояния. В первой конфигурации преобразователь 20 не используется и может быть исключен. Во второй конфигурации процессора 16 данных преобразователь 20 используется для преобразования истекших времен прохождения в соответствующие расстояния между опорными точками (например, пространственно совпадающими с антеннами (77, 87, 97 и 81)).
При использовании преобразователя 20 преобразователь 20 может преобразовать каждое истекшее время прохождения в радиус или расстояние на основании следующего уравнения: расстояние=c·t, где c=3x108 метров в секунду (или скорость света), t=истекшее время или время прохождения, а расстояние - расстояние в метрах. При использовании времени прохождения в обоих направлениях в качестве истекшего времени между первичной опорной точкой (например, антенной первичного приемопередатчика 77) на первичном транспортном средстве и вторичной опорной точкой (например, антенной первого ретранслятора 79) на вторичном транспортном средстве, расстояние (d) делится на два для получения расстояния или радиуса между опорными точками. Кроме того, для активных ретрансляторов или активных маяков может использоваться вычисление времени или расстояния с учетом смещения или задержки обработки в каждом ретрансляторе, приемопередатчике или маяке. Процессор 16 данных может быть сконфигурирован (a) для использования времени прохождения в одном направлении от первичного приемопередатчика 15 до первого ретранслятора 30 и времени прохождения в одном направлении от первичного приемопередатчика 15 до второго ретранслятора 34 или (b) для использования времени прохождения в прямом и обратном направлениях, или времени прохождения в обоих направлениях от первичного приемопередатчика 15 до первого ретранслятора 30, или времени прохождения в прямом и обратном направлениях, или времени прохождения сигнала в обоих направлениях от первичного приемопередатчика 15 до второго ретранслятора 34.
Блок 21 управления организовывает времена прохождения (или соответствующие расстояния), которые получены посредством первичного приемопередатчика 15. Времена прохождения (или соответствующие расстояния) могут быть организованы как (a) по существу одновременные времена приема или передачи, (b) последовательности времен приема или передачи, (c) идентификаторы сигнала или любого из предшествующих. Полученные времена прохождения могут быть помечены отметкой времени для указания времени сбора данных или могут быть иначе индексированы относительно опорных тактовых импульсов или таймера. Кроме того, первый сигнал передачи, второй сигнал передачи и третий сигнал передачи могут быть уникально закодированы, модулированы или иначе структурированы для уникального отличия одного сигнала передачи от другого. Например, первый сигнал передачи, второй сигнал передачи и третий сигнал передачи могут быть связаны с идентификатором первого сигнала, идентификатором второго сигнала и идентификатором третьего сигнала соответственно.
Времена прохождения могут быть выбраны или получены со строго соблюдаемыми интервалами. Например, в одной конфигурации времена прохождения сигналов могут быть выбраны или получены на частоте, большей чем или равной 5 Гц. В другой конфигурации времена прохождения могут быть выбраны или получены на частоте 100 Гц или больше. Преимущественно частота дискретизации, равная 100 Гц или больше, хорошо подходит для устранения конфликтов и поддержки желательного пространственного разнесения между первичным транспортным средством и вторичным транспортным средством.
Полученные времена прохождения могут включать в себя первое время прохождения, второе время прохождения, третье время прохождения и четвертое время прохождения. Первое время прохождения представляет собой задержку, связанную с прохождением электромагнитного сигнала между первичным приемопередатчиком 15 (например, антенной 77 первичного приемопередатчика) и первым ретранслятором 30 (например, антенной 79 первого ретранслятора), тогда как второе время прохождения представляет собой задержку, связанную с прохождением электромагнитного сигнала между первичным приемопередатчиком 15 (например, антенной 77 приемопередатчика) и вторым ретранслятором 34 (например, антенной 81 второго ретранслятора).
Первое время прохождения, в целом, пропорционально первому расстоянию между антенной 79 первого ретранслятора и антенной 77 первичного приемопередатчика; второе время прохождения, в целом, пропорционально второму расстоянию между антенной 81 второго ретранслятора и антенной 77 первичного приемопередатчика. Первое время прохождения и второе время прохождения определяют первый радиус (или пропорциональность радиусу) первичного транспортного средства по отношению к вторичному транспортному средству. Например, вторичное транспортное средство потенциально может быть расположено где-нибудь в пределах первого радиуса (например, как определено выше) от антенны 77 первичного приемопередатчика, где первый радиус разделяет антенну 79 первого ретранслятора от антенны 81 второго ретранслятора. Третье время прохождения, четвертое время прохождения или обе указанные величины могут использоваться для разрешения неоднозначности в отношении расположения вторичного транспортного средства относительно первого радиуса. Однако может быть затребована дополнительная информация (например, данные, определяющие местоположение приемника, данные видеосистемы, данные оптического наблюдения или дальномер) для определения того, находится ли вторичное транспортное средство справа или слева от транспортного средства или имеет другое соответствующее местоположение.
В альтернативном варианте осуществления выход оптического или лазерного дальномера соединен с процессором 16 данных для разрешения любой оставшейся неоднозначности в относительных местоположениях первичного транспортного средства и вторичного транспортного средства.
Изображенная на Фиг.2 система 111 является подобной системе 11, изображенной на Фиг.1, за исключением того, что система, изображенная на Фиг.2, включает в себя дополнительные компоненты, связанные с электроникой 110 первичного транспортного средства и электроникой 126 вторичного транспортного средства. Дополнительные компоненты электроники 110 первичного транспортного средства включают в себя первое устройство 24 беспроводной связи и интерфейс 38 связи. Дополнительные компоненты электроники 126 вторичного транспортного средства включают в себя второе устройство 36 беспроводной связи, интерфейс 38 управления, контроллер 41 вторичного транспортного средства, систему 42 рулевого управления, тормозную систему 44 и систему 46 обеспечения движения. Ссылочные позиции, изображенные на Фиг.1 и Фиг.2, указывают на подобные элементы.
Интерфейс 38 связи обеспечивает передачу данных одного или нескольких из следующих типов: данные временной синхронизации, данные расстояния, временные данные, данные относительного местоположения и данные относительного курса. Интерфейс 38 связи обеспечивает передачу любых из предшествующих типов данных к электронике 26 вторичного транспортного средства через первое устройство 24 беспроводной связи и второе устройство 36 беспроводной связи, связанные с первичным транспортным средством и вторичным транспортным средством соответственно. Данные относительного местоположения означают относительное местоположение первичного транспортного средства по отношению к вторичному транспортному средству, которое может сослаться на одну или несколько опорных точек, связанных с транспортным средством. Данные относительного курса означают относительный курс (например, азимут или курсовой угол) первичного транспортного средства по отношению к вторичному транспортному средству. Данные временной синхронизации могут быть использованы для координирования опорных тактовых импульсов (или синхроимпульсов) или генераторов (например, генератора точности или рубидиевых генераторов) для обеспечения точных измерений времен передачи и времен приема электромагнитных сигналов, передающихся между первичным транспортным средством и вторым транспортным средством.
Электроника 110 первичного транспортного средства может обмениваться данными местоположения (например, данными местоположения, данными курса или данными ориентации) в однонаправленном или двунаправленном режиме с электроникой 126 вторичного транспортного средства через линию связи, установленную между первым устройством 24 беспроводной связи и вторым устройством 36 беспроводной связи. Данные местоположения могут иметь отношение к азимуту, курсу, местоположению, координатам, пути, скорости, ускорению или к другому указанию местоположения первичного транспортного средства, вторичного транспортного средства или их обоих. Кроме того, данные местоположения могут содержать относительный азимут, относительный курс, относительные координаты, относительную скорость, относительное ускорение или другой относительный индикатор местоположения по отношению к первичному транспортному средству и вторичному транспортному средству.
Второе устройство 36 беспроводной связи соединено с интерфейсом 38 управления. В свою очередь интерфейс 38 управления соединен с контроллером 41 вторичного транспортного средства. Контроллер 41 вторичного транспортного средства может послать сигналы управления одному или нескольким вторичным устройствам через логический канал передачи данных или физический канал передачи данных (например, шину передачи данных): системе 42 рулевого управления, тормозной системе 44 и системе 46 обеспечения движения. В электронике 26 вторичного транспортного средства интерфейс 38 управления принимает данные расстояния, временные данные или данные относительного местоположения и предоставляет их контроллеру 41 вторичного транспортного средства.
В одной конфигурации контроллер 41 вторичного транспортного средства может формировать сигналы управления для системы 42 рулевого управления, тормозной системы 44 и системы 46 обеспечения движения, которые являются совместимыми с прослеживанием плана пути или прослеживания первичного местоположения и первичного курса транспортного средства. Например, сигналы управления могут содержать сигнал управления рулевым механизмом или информационное сообщение, которое является зависимым от времени и определяет угол поворота вала рулевого управления; сигнал управления тормозной системой или информационное сообщение, которое определяет степень торможения, гидравлического давления или фрикционного торможения, применяемого к тормозам; сигнал управления системой обеспечения движения или информационное сообщение, которое управляет режимом работы двигателя, расходом топлива, топливной системой, системой впрыска топлива, скоростью транспортного средства или ускорением транспортного средства. Если транспортное средство приводится в движение посредством электропривода или электродвигателя, то сигнал управления системой обеспечения движения или информационное сообщение может управлять электрической энергией, электрическим током или электрическим напряжением для электропривода или электродвигателя.
В другой конфигурации контроллер 41 вторичного транспортного средства может направлять транспортное средство для поддержки безопасного или одинакового расстояния и/или курса относительно первичного транспортного средства или проследить курс первичного транспортного средства. Например, контроллер 41 транспортного средства может управлять системой 42 рулевого управления для прослеживания курса первичного транспортного средства и системой 46 обеспечения движения для прослеживания ускорения, скорости или угловой скорости (числа оборотов) первичного транспортного средства.
В одном варианте осуществления вторичное транспортное средство может проследить первичное местоположение и первичный курс первичного транспортного средства с минимальным временем задержки для обработки данных и управления. Несмотря на то что первичное транспортное средство может быть расценено как ведущее транспортное средство, а вторичное транспортное средство может быть расценено как ведомое или следующее за ним транспортное средство, вторичное транспортное средство может проследить первичное транспортное средство способом «расположения рядом» или наоборот.
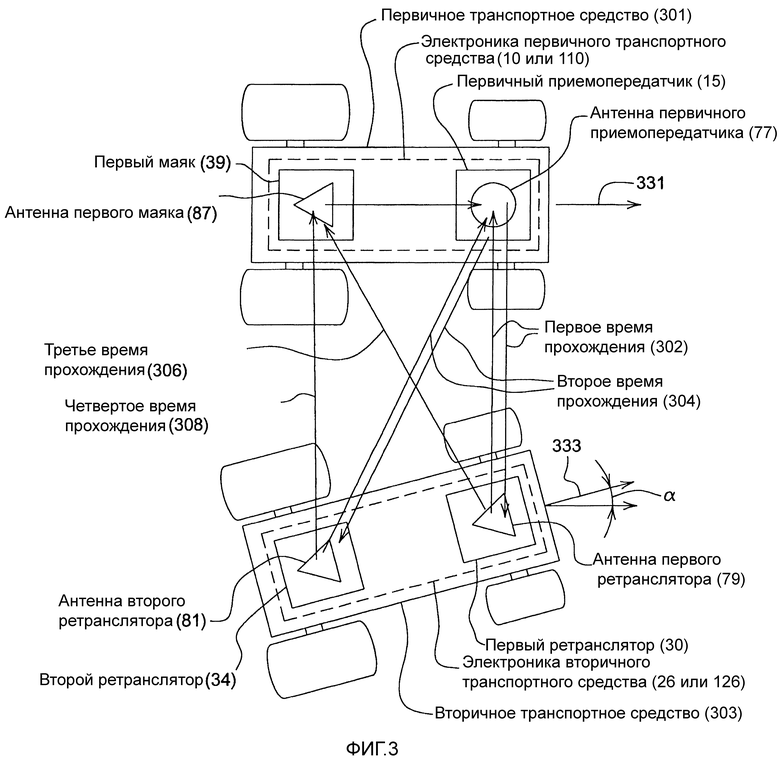
Фиг.3 изображает вид сверху и представление структурной схемы первичного транспортного средства 301 и вторичного транспортного средства 303. Несмотря на то что антенны (77, 79, 81 и 87) могут быть размещены способом, отличным от изображенного, не выходя за пределы объема изобретения, как изображено на Фиг.3, первичное транспортное средство 301 включает в себя антенну 77 первичного приемопередатчика, которая установлена впереди по отношению к антенне 87 первого маяка; вторичное транспортное средство 303 включает в себя антенну 79 первого ретранслятора, которая установлена впереди по отношению к антенне 81 второго ретранслятора. Антенна 77 первичного приемопередатчика и антенна первого маяка 87 расположены в первичных опорных точках на первичном транспортном средстве 301. Антенна 79 первого ретранслятора и антенна 81 второго ретранслятора расположены во вторичных опорных точках на вторичном транспортном средстве 303.
Первичный приемопередатчик 15 передает первый сигнал передачи (например, импульс или последовательность импульсов с идентификатором первого сигнала) первому ретранслятору 30 и второму ретранслятору 34. Как показано, первый ретранслятор 30 передает эхо-сигнал (сигнал обратной связи) (например, импульс или последовательность импульсов второго сигнала передачи с идентификатором второго сигнала) первичному приемопередатчику 15, а второй ретранслятор 34 передает другой эхо-сигнал (сигнал обратной связи) (например, импульс или последовательность импульсов третьего сигнала передачи с идентификатором третьего сигнала) первичному приемопередатчику 15. Первое время 302 прохождения связано с прохождением сигнала в одном направлении или прохождением сигнала в обоих направлениях между первичным приемопередатчиком 15 и первым ретранслятором 30. Второе время 304 прохождения связано с прохождением сигнала в одном направлении или прохождением сигнала в обоих направлениях между первичным приемопередатчиком 15 и вторым ретранслятором 34. Первое расстояние, которое является пропорциональным первому времени 302 прохождения, представляет собой расстояние между антенной 77 первичного приемопередатчика и антенной 79 первого ретранслятора. Второе расстояние, которое является пропорциональным второму времени 304 прохождения, представляет собой расстояние между антенной 77 первичного приемопередатчика и антенной 81 второго ретранслятора.
После приема первого сигнала передачи, первый ретранслятор 30 передает второй сигнал передачи (например, импульс с идентификатором второго сигнала) первичному приемопередатчику 15 и первому маяку 39; второй ретранслятор 34 передает третий сигнал передачи (например, импульс с идентификатором третьего сигнала) первичному приемопередатчику 15 и первому маяку 39. Третье время 306 прохождения связано с (a) прохождением сигнала в одном направлении между первичным приемопередатчиком 15 и первым маяком 39 через первый ретранслятор 30 или (b) прохождением сигнала в одном направлении между первым ретранслятором 30 и первым маяком 39. Третье расстояние пропорционально третьему времени 306 прохождения. Четвертое время 308 прохождения связано с (a) прохождением сигнала в одном направлении между первичным приемопередатчиком 15 и первым маяком 39 через второй ретранслятор 34 или (b) прохождением сигнала в одном направлении между вторым ретранслятором 34 и первым маяком 39. Четвертое расстояние пропорционально четвертому времени 308 прохождения.
Первичный приемопередатчик 15 и первый маяк 39 могут взаимодействовать друг с другом посредством беспроводной связи или через линию передачи, волоконно-оптический кабель, коаксиальный кабель, линию связи Ethernet или другой конфигурации. Задержка прохождения сигнала, связанная с линией передачи, может быть измерена или предопределена для данной длины линии передачи между первичным приемопередатчиком 15 и первым маяком 39 для компенсации задержки в связи или для ее обработки. В одном варианте осуществления первый маяк 39 может передавать один или несколько следующих типов первичному приемопередатчику 15: (1) истекшее время передачи от передатчика 14 для передачи сигнала передачи (например, импульса) со специфическим идентификатором соответствующего сигнала, (2) время приема первым маяком 39 для приема передачи сигнала передачи со специфическим идентификатором соответствующего сигнала, (3) время передачи от первичного приемопередатчика 15 и время приема первым маяком и (4) разность между временем передачи и временем приема первому маяку 39. Электронике (10 или 110) первичного транспортного средства и электронике (26 или 126) вторичного транспортного средства могут потребоваться генераторы точности или тактовые импульсы, которые синхронизированы с данными обмена или синхронизации, чтобы должным образом оценить и определить предшествующее время передачи, время приема, разность времен и любое другое время прохождения между электроникой 26 вторичного транспортного средства и электроникой 10 первичного транспортного средства.
Первичное транспортное средство 301 имеет первичный курс 331, а вторичное транспортное средство имеет вторичный курс 333. Разность или дифференциальный угол (a) между первичным курсом и вторичным курсом может содержать сигнал ошибки или информацию об ошибке, которая используется для управления первичным транспортным средством, вторичным транспортным средством или ими обоими. Кроме того, каждое транспортное средство может иметь (1) абсолютное местоположение и абсолютный курс или (2) относительное местоположение и относительный курс по отношению к другому транспортному средству. Абсолютное местоположение или относительное местоположение могут быть определены по отношению к опорной точке транспортного средства (например, геометрическому центру, или центру тяжести, или местоположениям антенн (77, 79, 87 и 81)). Абсолютный или относительный курс может быть определен по отношению к опорному курсу или опорному азимуту (например, «точно на север» или «магнитный север).
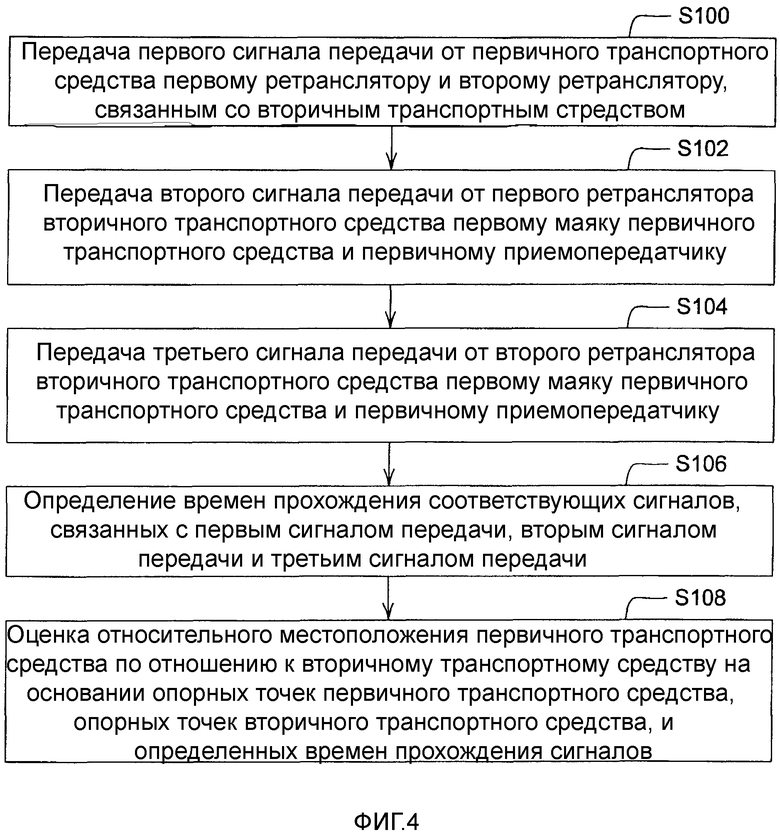
Фиг.4 иллюстрирует способ определения относительного местоположения и ориентации первичного транспортного средства по отношению к вторичному транспортному средству. Способ, изображенный на Фиг.4, начинается с этапа S100.
На этапе S100 первичный приемопередатчик 15 или передатчик передает первый сигнал передачи с первичного транспортного средства на первый ретранслятор 30 и второй ретранслятор 34, связанные с вторичным транспортным средством. Первая передача может содержать опознаваемый импульс и может быть закодирована в идентификаторе первого сигнала для указания его источника, его адресата или их обоих. Первый сигнал передачи может быть смодулирован с закодированным сигналом (например, кодом псевдослучайного шума), импульсом, последовательностью импульсов, фазовой модуляцией, кодированием со сдвигом амплитуды, частотной модуляцией, модуляцией ширины импульса, амплитудно-импульсной модуляцией, фазово-импульсной модуляцией или любой другой подходящей схемой модуляции. Антенна 79 первого ретранслятора и антенна 81 второго ретранслятора связаны с опорными точками вторичного транспортного средства (например, двухмерными или трехмерными пространственными координатами вторичного транспортного средства), которые расположены отдельно друг от друга.
На этапе S102 первый ретранслятор 30 вторичного транспортного средства передает второй сигнал передачи от первого ретранслятора 30 вторичного транспортного средства первому маяку 39 первичного транспортного средства и первичному приемопередатчику 15. Например, после приема первого сигнала передачи первый ретранслятор 30 передает второй сигнал передачи с идентификатором второго сигнала первому маяку 39 первичного транспортного средства и первичному приемопередатчику 15. Антенна 77 первичного приемопередатчика и антенна 87 первого маяка связаны с опорными точками первичного транспортного средства, которые расположены отдельно друг от друга.
На этапе S104 второй ретранслятор 34 вторичного транспортного средства передает третий сигнал передачи от второго ретранслятора 34 вторичного транспортного средства первому маяку 39 первичного транспортного средства и первичному приемопередатчику 15. Например, после приема первого сигнала передачи второй ретранслятор 34 передает третий сигнал передачи с идентификатором третьего сигнала первому маяку 39.
На этапе S106 процессор данных определяет соответствующие времена прохождения, связанные с первым сигналом передачи, вторым сигналом передачи и третьим сигналом передачи. Например, процессор данных или блок оценки определяют (1) первое время прохождения, связанное с первым сигналом передачи между антенной 77 первичного приемопередатчика и антенной 79 первого ретранслятора, (2) второе время прохождения, связанное с первым сигналом передачи между антенной 77 первичного приемопередатчика и антенной 81 второго ретранслятора; (3) третье время прохождения, связанное со вторым сигналом передачи между первым ретранслятором 30 и первым маяком 39; (4) четвертое время прохождения, связанное с третьим сигналом передачи между вторым ретранслятором 34 и первичным приемопередатчиком 15.
Первое время прохождения может содержать время прохождения в обоих направлениях, которое включает в себя время прохождения между первичным приемопередатчиком 15 и первым ретранслятором 30 и время прохождения между первым ретранслятором 30 и первичным приемопередатчиком 15. Точно так же второе время прохождения может содержать время прохождения в обоих направлениях, которое включает в себя время прохождения между первичным приемопередатчиком 15 и вторым ретранслятором 34 и время прохождения сигнала между вторым ретранслятором 34 и первичным приемопередатчиком 15. Например, первое время прохождения содержит время прохождения между моментом времени передачи в передатчике и моментом времени приема в первом ретрансляторе 30, а второе время прохождения содержит время прохождения между моментом времени передачи в передатчике и моментом времени приема во втором ретрансляторе 34.
На этапе S108 блок 18 оценки оценивает относительное местоположение первичного транспортного средства по отношению к вторичному транспортному средству на основании опорных точек первичного транспортного средства, опорных точек вторичного транспортного средства и определенных времен прохождения. Например, процессор (16 или 116) данных или блок 18 оценки оценивает относительное местоположение первичного транспортного средства по отношению к вторичному транспортному средству на основании опорных точек первичного транспортного средства, опорных точек вторичного транспортного средства, определенного первого времени прохождения, второго времени прохождения и, по меньшей мере, одного из третьего времени прохождения и четвертого времени прохождения. В определенных применениях первичное транспортное средство и вторичное транспортное средство могут перемещаться в относительно непосредственной пространственной близости друг к другу. Непосредственная пространственная близость может быть равна только лишь 20 сантиметрам пространственного разнесения для транспортных средств, перемещающихся на более низких скоростях, и столь же большой, как 10 метров пространственного разнесения для транспортных средств, перемещающихся на более высоких скоростях. Для безопасного обнаружения и исключения столкновений относительное местоположение и измерения ориентации обычно собираются со строго соблюдаемыми интервалам (например, периодически) при (на) достаточно высокой частоте (например, больше чем или равной 100 Гц). Высокая частота может превысить максимальную частоту типичного определяющего местоположение приемника (например, приемника Глобальной Системы Определения Местоположения с дифференциальной поправкой).
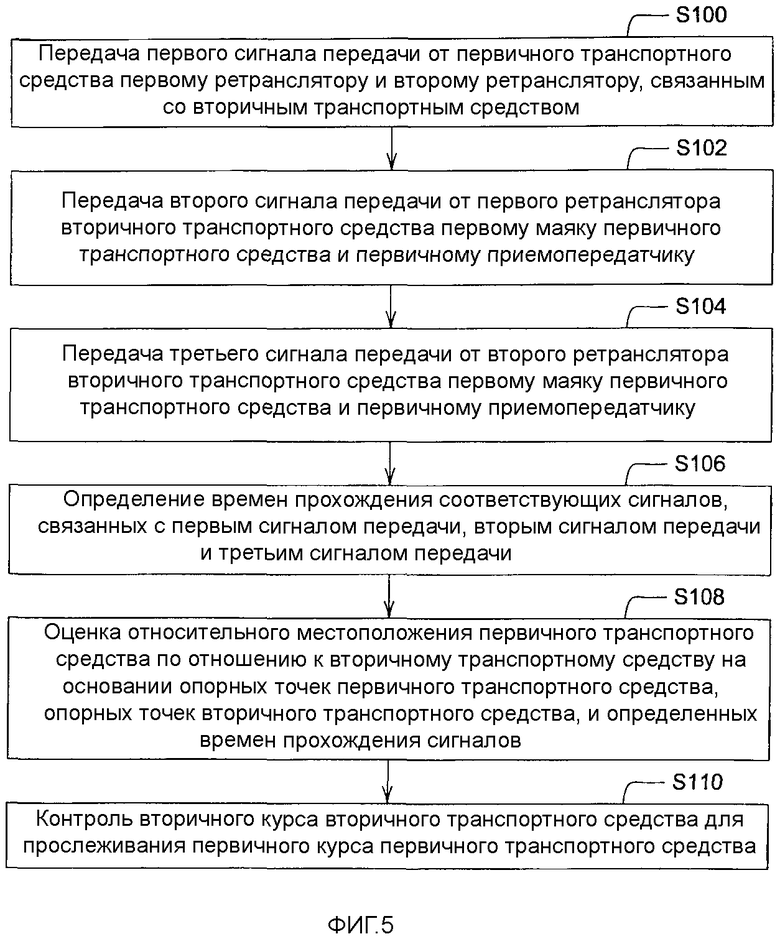
Способ, изображенный на Фиг.5, подобен способу, показанному на Фиг.4, за исключением того, что он дополнительно содержит этап S110. Одинаковые ссылочные номера, изображенные на Фиг.4 и Фиг.5, указывают аналогичные элементы или аналогичные процедуры.
На этапе S110, после этапа S108, контроллер транспортного средства (например, контроллер вторичного транспортного средства) управляет вторичным курсом вторичного транспортного средства, чтобы проследить первичный курс первичного транспортного средства. Соответственно, если первичное транспортное средство и вторичное транспортное средство будут находиться в параллельном пространственном расположении, то первичное транспортное средство и вторичное транспортное средство не будут сталкиваться или пересекать пути (траектории движения) друг друга, если скорость транспортного средства, угловая скорость, ускорение и курс транспортного средства будут приблизительно одинаковыми или находиться в пределах некоторого максимального допуска на основании пространственного разнесения между первичным транспортным средством и вторичным транспортным средством (например, в отношении одной или нескольких опорных точек каждого транспортного средства).
Этап S110 может быть добавлен в соответствии с различными методиками, которые могут быть применены отдельно или кумулятивно. В дополнение к управлению относительными курсами транспортных средств управление местоположениями и ориентациями транспортного средства может учитывать следующие дополнительные методики. В первой методике контроллер 40 первичного транспортного средства, контроллер 41 вторичного транспортного средства или оба управляют боковым разнесением между первичным транспортным средством и вторичным транспортным средством для соблюдения минимального бокового пространственного разнесения (например, 20 сантиметров).
Во второй методике процессор (16 или 116) данных оценивает относительные местоположения и курсовой угол первичного транспортного средства и вторичного транспортного средства с частотой обновления, по меньшей мере, 100 Гц для облегчения исключения конфликтов между первичным транспортным средством и вторичным транспортным средством.
В третьей методике контроллер 40 первичного транспортного средства и контроллер 41 вторичного транспортного средства могут взаимодействовать для определения вторичного транспортного средства, чтобы оно следовало за первичным транспортным средством в течение первого режима работы, и определения первичного транспортного средства, чтобы оно следовало за вторичным транспортным средством в течение второго режима работы. Переключение с первого режима на второй режим может быть вызвано посредством события, связанного с неисправностью, ненадежностью или повреждением компонента (например, сигнала или выходных данных датчика транспортного средства) на первичном транспортном средстве или вторичном транспортном средстве. Например, если первичное транспортное средство имеет критическую неисправность компонента, а транспортные средства работают в первом режиме работы, то контроллер 40 первичного транспортного средства может передать сигнал контроллеру 41 вторичного транспортного средства для переключения на второй режим работы через первое устройство 24 беспроводной связи и второе устройство 36 беспроводной связи.
Способ, изображенный на Фиг.6, подобен способу, изображенному на Фиг.4, за исключением того, что этапы S106 и S108 заменены на этапы S107 и S109, показанные на Фиг.6. Одинаковые ссылочные позиции, изображенные на Фиг.4 и Фиг.6, указывают аналогичные этапы или процедуры.
На этапе S107, после этапа S104, процессор (16 или 116) данных определяет первое время прохождения, второе время прохождения и третье время прохождения на основании первого сигнала передачи, второго сигнала передачи и третьего сигнала передачи.
На этапе S109 процессор (16 или 116) данных или блок 18 оценки оценивает относительное местоположение первичного транспортного средства по отношению к вторичному транспортному средству на основании опорных точек первичного транспортного средства, опорных точек вторичного транспортного средства и определенного первого времени прохождения, второго времени прохождения и третьего времени прохождения.
Способ, изображенный Фиг.7, подобен способу, изображенному на Фиг.4, за исключением того, что этапы S106 и S108 заменены этапами S111 и S113 соответственно. Одинаковые ссылочные номера, показанные на Фиг.4 и Фиг.7, указывают аналогичные этапы или процедуры.
На этапе S111, после этапа S104, процессор (16 или 116) данных определяет первое время прохождения, второе время прохождения, третье время прохождения и четвертое время прохождения на основании первого сигнала передачи, второго сигнала передачи и третьего сигнала передачи.
На этапе S113 процессор (16 или 116) данных или блок 18 оценки оценивает относительное местоположение первичного транспортного средства по отношению к вторичному транспортному средству на основании опорных точек первичного транспортного средства, опорных точек вторичного транспортного средства, первого времени прохождения, второго времени прохождения, третьего времени прохождения и четвертого времени прохождения.
Система 211, изображенная на Фиг.8, является подобной системе 111, изображенной на Фиг.2, за исключением того, что первичная электроника 210 дополнительно содержит второй маяк 49, а вторичная электроника 226 включает в себя другие компоненты. Одинаковые ссылочные номера, показанные на Фиг.1, Фиг.2 и Фиг.8, указывают аналогичные элементы.
Второй маяк 49 содержит приемопередатчик 32 или комбинацию передатчика и приемника. Антенна 87 первого маяка и антенна 89 второго маяка расположены раздельно посредством известного пространственного разнесения 93.
Электроника 226 вторичного транспортного средства содержит первый ретранслятор 30, второй ретранслятор 34, вторичный приемопередатчик 88 и процессор 116 данных. И первый ретранслятор 30 и второй ретранслятор 34 включают в себя приемопередатчик 32, который соединен с процессором 116 данных.
Вторичный приемопередатчик 88 содержит приемник 12 и передатчик 14. Вторичный приемопередатчик 88 выполняет функцию, подобную функции первичного приемопередатчика 15, но вторичный приемопередатчик 88 обозначен в связи с тем, что он постоянно находится или связан с вторичным транспортным средством. Общее время прохождения между любыми тремя антеннами может быть оценено посредством декомпозиции общего времени прохождения на две составляющие времени прохождения между этими тремя антеннами с учетом любого смещения или задержки при обработке в любом промежуточном маяке или ретрансляторе.
Процессор 116 данных содержит блок 18 оценки, преобразователь 20, интерфейс 38 связи и блок 21 управления. Присутствие процессора 116 данных в первичном транспортном средстве и вторичном транспортном средстве обеспечивает оценку времен прохождения в одном направлении или времен прохождения в обоих направлениях или в транспортном средстве или в обоих транспортных средствах. Первое устройство 24 беспроводной связи и второе устройство 36 беспроводной связи могут обмениваться любым из следующих типов информации: (a) данные временной синхронизации, (b) данные, которые обеспечивают оценку времени прохождения в одном направлении между первичной электроникой 210 транспортного средства и вторичной электроникой 226 транспортного средства, и (c) времена прохождения в одном направлении или времена прохождения в обоих направлениях между любыми двумя антеннами (77, 87, 89, 79 и 81) первичного транспортного средства или вторичного транспортного средства.
Процессор 116 данных в первичном транспортном средстве и вторичном транспортном средстве позволяет транспортному средству или определять его относительное местоположение по отношению к другому транспортному средству или его относительный курс относительно другого транспортного средства. Кроме того, и электроника 210 первичного транспортного средства и электроника 226 вторичного транспортного средства, изображенные на Фиг.8, позволяют транспортному средству или быть ведущим транспортным средством или ведомым транспортным средством, совместимым с дополнительными методиками изображенного на Фиг.5 этапа S110 или иначе. Ведущее транспортное средство и ведомое транспортное средство могут изменять роли время от времени, через некоторый период времени, или после того, как происходит событие вызова (например, датчик транспортного средства указывает на повреждение ведущему транспортному средству, или на маневр уклонения, требуемый в военных операциях, или на маневр обхода препятствий в других установочных параметрах).
В процессоре 116 данных любого транспортного средства преобразователь 20 может преобразовать первую задержку прохождения и вторую задержку прохождения в первое расстояние и второе расстояние соответственно для последующего преобразования в данные управления. Блок 21 управления может использовать временные данные, или данные расстояния для разработки управления, или данные управления для контроллера 41 вторичного транспортного средства.
Диаграмма, изображенная на Фиг.9, подобна диаграмме, изображенной на Фиг.3, за исключением того, что диаграмма, изображенная на Фиг.9, совместима с системой 211, изображенной на Фиг.8. Одинаковые ссылочные номера, показанные на Фиг.3, Фиг.8, и Фиг.9, указывают на аналогичные элементы.
Изображенное на Фиг.9 первичное транспортное средство 801 включает в себя второй маяк 49 и антенну 89 второго маяка. Вторичное транспортное средство 803 включает в себя вторичный приемопередатчик 88 и антенну 95 вторичного приемопередатчика. Второй маяк 49 и вторичный приемопередатчик 88 позволяет вторичному транспортному средству 803 меняться ролями с первичным транспортным средством 801.
Как изображено на Фиг.9, первичное транспортное средство 801 и вторичное транспортное средство 803 работают в первом режиме работы с вторичным транспортным средством 803, следующим за первичным транспортным средством 801. Однако первичное транспортное средство 801 следует за вторичным транспортным средством 803 в случае, если транспортные средства работают во втором режиме работы. Во втором режиме работы второй приемопередатчик 88 берет роль, аналогичную роли первичного приемопередатчика 88 в первом режиме работы; и первый маяк 39 и второй маяк 49 берут роли, аналогичные ролям первого ретранслятора 30 и второго ретранслятора 34 в первом режиме работы соответственно.
Из описания предпочтительного варианта осуществления очевидно, что могут быть сделаны различные изменения, без отступления от объема изобретения, как определено в прилагаемой формуле изобретения.
Изобретение относится к системам определения относительного местоположения. Технический результат состоит в поддержке степени выравнивания и координации между первичным и вторичным местоположением транспортного средства. Для этого приемопередатчик первичного транспортного средства передает первый сигнал передачи на первый ретранслятор и второй ретранслятор, связанные с вторичным транспортным средством. Антенна первого ретранслятора и антенна второго ретранслятора связаны с опорными точками вторичного транспортного средства. После приема первого сигнала передачи первый ретранслятор передает второй сигнал передачи первому маяку первичного транспортного средства и первичному приемопередатчику. Антенна передатчика и антенна первого маяка связаны с опорными точками первичного транспортного средства. После приема первого сигнала передачи второй ретранслятор передает третий сигнал передачи первому маяку и первичному приемопередатчику. Процессор данных или блок оценки оценивает относительное местоположение первичного транспортного средства по отношению к вторичному транспортному средству на основании опорных точек первичного транспортного средства, опорных точек вторичного транспортного средства и определенных времен прохождения. 2 н. и 18 з.п. ф-лы, 9 ил.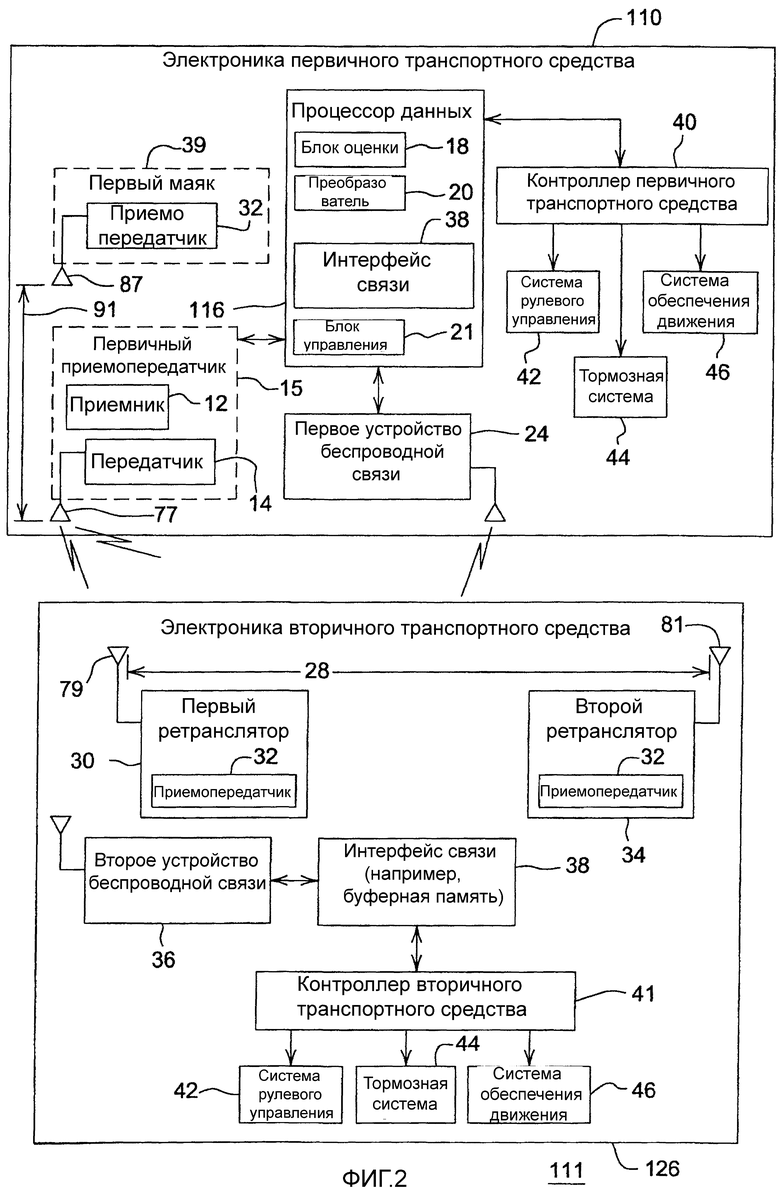
1. Способ определения относительного местоположения первичного транспортного средства по отношению к вторичному транспортному средству, содержащий этапы, на которых передают первый сигнал передачи от первичного приемопередатчика первичного транспортного средства первому ретранслятору и второму ретранслятору, связанным с вторичным транспортным средством, причем антенна первого ретранслятора и антенна второго ретранслятора связаны с опорными точками вторичного транспортного средства, которые расположены отдельно друг от друга; передают второй сигнал передачи от первого ретранслятора вторичного транспортного средства первому маяку первичного транспортного средства и первичному приемопередатчику, причем антенна первичного приемопередатчика и антенна первого маяка связаны с опорными точками первичного транспортного средства, которые расположены отдельно друг от друга; передают третий сигнал передачи от второго ретранслятора вторичного транспортного средства первому маяку первичного транспортного средства и первичному приемопередатчику; определяют соответствующие времена прохождения, связанные с первым сигналом передачи, вторым сигналом передачи и третьим сигналом передачи; и оценивают относительное местоположение первичного транспортного средства по отношению к вторичному транспортному средству на основании опорных точек первичного транспортного средства, опорных точек вторичного транспортного средства и определенных времен прохождения сигналов.
2. Способ по п.1, в котором этап определения соответствующих времен прохождения содержит этап, на котором определяют (a) первое время прохождения, связанное с первым сигналом передачи между антенной первичного приемопередатчика и антенной первого ретранслятора, (b) второе время прохождения, связанное с первым сигналом передачи между антенной первичного приемопередатчика и антенной второго ретранслятора; (c) третье время прохождения, связанное со вторым сигналом передачи между первым ретранслятором и первым маяком; (d) четвертое время прохождения, связанное с третьим сигналом передачи между вторым ретранслятором и первым маяком.
3. Способ по п.2, в котором этап оценки также содержит этап, на котором оценивают относительное местоположение первичного транспортного средства по отношению к вторичному транспортному средству на основании опорных точек первичного транспортного средства, опорных точек вторичного транспортного средства, определенного первого времени прохождения, второго времени прохождения, и, по меньшей мере, одного из третьего времени прохождения и четвертого времени прохождения.
4. Способ по п.1, дополнительно содержащий этап, на котором управляют вторичным курсом вторичного транспортного средства, чтобы в целом следовать первичному курсу первичного транспортного средства.
5. Способ по п.1, дополнительно содержащий этап, на котором управляют боковым разнесением между первичным транспортным средством и вторичным транспортным средством так, чтобы поддерживалось или превышалось минимальное пространственное разнесение.
6. Способ по п.1, дополнительно содержащий этап, на котором
оценивают относительные местоположения и курсовой угол первичного транспортного средства и вторичного транспортного средства с частотой обновления, по меньшей мере, 100 Гц для предотвращения столкновения между первичным транспортным средством и вторичным транспортным средством.
7. Способ по п.1, дополнительно содержащий этапы, на которых определяют, что вторичное транспортное средство следует за первичным транспортным средством в течение первого режима;
определяют, что первичное транспортное средство следует за вторичным транспортным средством в течение второго режима.
8. Способ по п.1, в котором на этапе оценки первое время прохождения и второе время прохождения определяют радиус вторичного транспортного средства по отношению к первичному транспортному средству и, третье время прохождения определяет индикатор азимута вторичного транспортного средства по отношению к первичному транспортному средству.
9. Способ по п.1, в котором первое время прохождения содержит время прохождения между моментом времени передачи в передатчике и моментом времени приема в первом ретрансляторе, и второе время прохождения содержит время прохождения между моментом времени передачи в передатчике и моментом времени приема во втором ретрансляторе.
10. Способ по п.9, дополнительно содержащий этап, на котором преобразовывают первое время прохождения и второе время прохождения в первое расстояние и второе расстояние соответственно.
11. Система для определения относительного местоположения первичного транспортного средства по отношению к вторичному транспортному средству, содержащая: первичный приемопередатчик для передачи первого сигнала передачи от первичного приемопередатчика первичного транспортного средства первому ретранслятору и второму ретранслятору, связанным с вторичным транспортным средством, причем антенна первого ретранслятора и антенна второго ретранслятора связаны с опорными точками вторичного транспортного средства, которые расположены отдельно друг от друга;
первый ретранслятор для передачи второго сигнала передачи от первого ретранслятора вторичного транспортного средства первому маяку первичного транспортного средства и первичному приемопередатчику, причем антенна первичного приемопередатчика и антенна первого маяка связаны с опорными точками первичного транспортного средства, которые расположены отдельно друг от друга;
второй ретранслятор для передачи третьего сигнала передачи от второго ретранслятора вторичного транспортного средства первому маяку первичного транспортного средства и первичному приемопередатчику;
блок оценки для определения соответствующих времен прохождения, связанных с первым сигналом передачи, вторым сигналом передачи и третьим сигналом передачи; и
процессор данных для оценки относительного местоположения первичного транспортного средства по отношению к вторичному транспортному средству на основании опорных точек первичного транспортного средства, опорных точек вторичного транспортного средства и определенных времен прохождения сигналов.
12. Система по п.11, в которой блок оценки определяет соответствующие времена прохождения в качестве первого времени прохождения, связанного с (а) первым сигналом передачи между антенной первичного приемопередатчика и антенной первого ретранслятора, (b) второго времени прохождения, связанного с первым сигналом передачи между антенной первичного приемопередатчика и антенной второго ретранслятора; (с) третьего времени прохождения, связанного с вторым сигналом передачи между первым ретранслятором и первым маяком; (d) четвертого времени прохождения, связанного с третьим сигналом передачи между вторым ретранслятором и первым маяком.
13. Система по п.12, в которой процессор данных оценивает относительное местоположение первичного транспортного средства по отношению к вторичному транспортному средству на основании первичного пространственного разнесения, вторичного пространственного разнесения, определенного первого времени прохождения, второго времени прохождения, и, по меньшей мере, одного из третьего времени прохождения и четвертого времени прохождения.
14. Система по п.11, дополнительно содержащая контроллер вторичного транспортного средства, выполненный с возможностью управления вторичным курсом вторичного транспортного средства, чтобы в целом следовать первичному курсу первичного транспортного средства.
15. Система по п.11, дополнительно содержащая контроллер вторичного транспортного средства для управления боковым разнесением между первичным транспортным средством и вторичным транспортным средством так, чтобы поддерживалось или превышалось минимальное боковое пространственное разнесение.
16. Система по п.11, в которой процессор данных оценивает относительные местоположения и курсовой угол первичного транспортного средства и вторичного транспортного средства с частотой обновления, по меньшей мере, 100 Гц для предотвращения столкновения между первичным транспортным средством и вторичным транспортным средством.
17. Система по п.11, дополнительно содержащая контроллер первичного транспортного средства и контроллер вторичного транспортного средства, определяющие, что вторичное транспортное средство следует за первичным транспортным средством в течение первого режима, и определяющие, что первичное транспортное средство следует за вторичным транспортным средством в течение второго режима.
18. Система по п.11, в которой оцененное в процессоре данных первое время прохождения и второе время прохождения определяют радиус вторичного транспортного средства по отношению к первичному транспортному средству и третье время прохождения определяет индикатор азимута вторичного транспортного средства по отношению к первичному транспортному средству.
19. Система по п.11, в которой процессор данных оценивает первое время прохождения, содержащее время прохождения между моментом времени передачи в передатчике и моментом времени приема в первом ретрансляторе, и второе время прохождения, содержащее время прохождения сигнала между моментом времени передачи в передатчике и моментом времени приема во втором ретрансляторе.
20. Система по п.19, дополнительно содержащая преобразователь для преобразования первого времени прохождения и второго времени прохождения в первое расстояние и второе расстояние соответственно.
| Дорожная спиртовая кухня | 1918 |
|
SU98A1 |
| ПОДВИЖНЫЙ ПЕЛЕНГАТОР | 1997 |
|
RU2124222C1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| WO 00/03491 A, 20.01.2000 | |||
| US 5923287 A, 13.07.1999. | |||

