Изобретение относится к области гидроакустических навигационных систем и может быть использовано для навигационного обеспечения подводных аппаратов, работающих в ледовых условиях, затрудняющих доступ к ним обеспечивающего судна, и также может быть использовано при проведении сейсмических и геологоразведочных работ на морском дне с использованием буксируемых или телеуправляемых подводных аппаратов.
Акустические навигационные системы с ультракороткой базой производятся значительным количеством компаний для различных областей применения - от позиционирования аквалангистов на мелководье до определения местоположения объектов на больших глубинах и дальностях. Наиболее известными являются гидроакустические навигационные системы фирм IXSEA, SIMRAD, SONARDYNE, KONGSBERG, GeoAcoustics. Типовые характеристики систем средней дальности до 3 км имеют частоты в диапазоне 20-30 кГц, точность - единицы процентов наклонной дальности. Системы дальнего действия порядка 10 км работают в диапазоне частот 10-15 кГц, заявленная точность навигации некоторых систем достигает 0.1% наклонной дальности. Наиболее широкое применение имеют две навигационные системы типа POSIDONIA и HIPAP-500. Первая использует сложные сигналы и за счет этого имеет улучшения отношения сигнал/шум по сравнению с тональными посылками на 19 дБ. В настоящее время заявленная точность составляет 0.3% наклонной дальности. Вторая представляет собой мощную фазируемую антенну, состоящую из сотен независимых приемников, имеющую, по утверждению изготовителя, избыточность в количестве приемников, вычислительных средствах и математическом обеспечении. Заявленная точность составляет 0.1% наклонной дальности, угол обзора - 200 град в вертикальной плоскости. Система сбора акустических данных этой системы не уступает системам сбора данных, например многолучевых эхолотов высокого разрешения, однако имеет высокую стоимость.
Известные системы акустической навигации, использующие принцип ультракороткой базы, определяют пространственное положение позиционируемого объекта путем измерения времени пробега и направления прихода акустических волн, излученных маяком, установленным на этом объекте, с помощью многоэлементной приемной антенны. Измеренное время пробега пересчитывается с учетом профиля скорости звука в наклонную дальность, а направление прихода волны на поверхность антенны с учетом наклонов и азимута самой антенны позволяет определить точку, из которой излучение звука было произведено. Измерение времени пробега производится путем анализа формы принятого звукового сигнала, при этом точность измерения времени определяется шириной полосы приемного тракта и отношением сигнал/шум. Определение направления прихода звуковой волны в УКБ системах производится путем измерения разности фаз сигналов, принятых разными гидрофонами, с последующим пересчетом разности фаз в геометрические углы с учетом характерной длины волны акустического сигнала и пространственного разнесения приемников. Точность измерения направления при этом определяется дистанцией между приемниками и отношением сигнал/шум. Точность измерения времени пробега или, другими словами, сочность определения положения объекта вдоль луча не зависит от расстояния (при достаточно высоком уровне сигнала по сравнению с шумами) и для традиционных систем дальнего действия составляет доли метра. При фиксированном угловом разрешении ошибка измерения положения объекта поперек луча линейно увеличивается с дистанцией и, как правило, характеризуется в процентном отношении к наклонной дальности. Лучшие образцы УКБ систем имеют угловую точность порядка 0.1%, что при дальности порядка 5 км соответствует точности поперек луча 5 м. Поскольку конечной целью использования любой навигационной системы является определение географических координат объекта, угловое разрешение является главной характеристикой УКБ системы.
Существуют два метода повышения точности УКБ систем, это увеличение пространственного разнесения приемников и увеличение отношения сигнал/шум.
Исследование имеющегося на рынке ряда УКБ систем показало, что практически все производители используют приемные антенны сравнительно небольших размеров - менее полуметра. Увеличение разнесения гидрофонов до 1-1,5 м позволит пропорционально увеличить угловую точность приемной антенны при фиксированном отношении сигнал/шум.
Увеличение отношения сигнал/шум достигается двумя способами: увеличением мощности сигнала и снижением уровня шума. Как правило, в источниках анализируемых звуковых сигналов для УКБ антенн используются пьезокерамические излучающие элементы, работающие на пределе излучаемой мощности, поэтому единственным способом усиления сигнала является увеличение его энергии за счет увеличения длительности. Увеличение длительности в тональном режиме приводит к снижению точности измерения времени пробега волны и, тем самым, к ухудшению характеристик навигации в целом. Единственным реальным способом увеличения энергии сигнала без ухудшения разрешающей способности системы по дальности является использование сложных сигналов. Такие системы известны, например типа «POSIDONIA» компании IXSEA OCEANO. Однако использование сложных сигналов требует, с одной стороны, значительного повышения производительности процессоров в транспондерах и бортовой антенне, а с другой - сокращает время жизни акустических ответчиков в автономном режиме при фиксированном ресурсе источников питания.
Окружающий шум в точке приема имеет сложный частотный и пространственный спектры, и его эффективный уровень может быть снижен за счет ограничения чувствительности приемников в областях, заведомо не содержащих полезной информации. Ограничение чувствительности в частотной области достигается оптимальной фильтрацией сигналов, ограничение чувствительности в пространственной области - пассивным или активным формированием диаграммы направленности. Пассивное формирование достигается применением отражающих и заглушающих элементов в конструкции антенны, которые ослабляют звуковые волны с нежелательных направлений. Такой способ применяется в большинстве известных УКБ систем и является весьма эффективным и относительно дешевым, однако не позволяет максимально сузить пространственный спектр анализируемого сигнала и добиться минимально возможного уровня шума. Активное формирование направленности достигается использованием многоэлементных фазируемых решеток и применяется, например, в системе « HIPAP-500» компании Kongsberg. Этот способ формирования диаграммы приема дает наилучшие результаты, однако реализация антенн такого типа является очень сложной и дорогостоящей задачей. Так, в системе HIPAP-500 используют сотни независимых приемных каналов, по которым осуществляется синхронный прием и обработка в реальном времени поступающей информации.
Известная гидроакустическая синхронная дальномерная навигационная система (патент RU №2032187 [1]) содержит донную навигационную базу из М гидроакустических приемоответчиков с различными частотами ответа и размещенные на объекте навигации гидроакустический передатчик, генератор синхроимпульсов, М-канальный приемник, М измерителей времени распространения гидроакустических сигналов до приемоответчиков и обратно, M·N блоков преобразования временных интервалов в дистанции по N в каждом из каналов из М, М блоков выбора максимального значения дистанции из N значений и вычислитель координат объекта навигации, в котором каждый из М каналов введены по числу лучевых траекторий N-1 дополнительных измерителей времени распространения гидроакустических сигналов, N-1 мультивибраторов задержки, N-1 мультивибраторов строб - импульса, N-1 селекторов, причем первые входы N-1 измерителей распространения соединены с выходом генератора синхроимпульсов, вторые входы соединены с первыми выходами соответствующих селекторов, а выходы соединены с M·N входами блока преобразования временных интервалов в дистанции, первый вход каждого из селекторов соединен с выходом соответствующего мультивибратора строб - импульса, второй вход соединен с выходом соответствующего канала приемника, вход первого мультивибратора задержки соединен с выходом соответствующего канала приемника, а выход каждого последующего мультивибратора задержки соединен с вторым выходом соответствующего селектора, в каждый из М каналов введены N(N-1) дополнительных блоков преобразования временных интервалов в дистанции, N-1 дополнительных блоков выбора максимального значения дистанции и усреднитель дистанции, причем входы каждого из N-1 наборов по N блоков преобразования временных интервалов в дистанции соединены с соответствующими выходами N-1 дополнительных измерителей временных интервалов, а выходы соединены с входами N-1 дополнительных блоков выбора максимального значения, выходы всех блоков выбора максимального значения дистанции соединены с N входами усреднителя дистанций, а выход усреднителя дистанций соединен с входом вычислителя координат объекта навигации.
В данной системе реализован способ навигации подводного объекта, включающий размещение гидроакустических ответчиков на дне водоема, создание навигационной базы из М гидроакустических приемоответчиков с различными частотами ответа, калибровку с помощью внешних средств обеспечения навигационной базы, посредством гидроакустического передатчика, размещенного на подводном объекте, измеряют временные интервалы распространения сигналов с последующим их преобразованием в дистанции между подводным объектом и гидроакустическими приемоответчиками. Для получения достоверных результатов измерений измеренные дистанции усредняют.
Навигационная база таких систем, предварительно устанавливаемая на дне акватории, как правило, состоит из 12-16 маяков ответчиков и предварительно калибруется в относительных и в географических координатах (относительная и абсолютная калибровки) с помощью судна обеспечения, оснащенного бортовым комплексом спутниковой и гидроакустической систем навигации. После выработки своего энергетического ресурса маяки-ответчики заменяются, при этом производится новая калибровка донной навигационной базы. Данный способ позволяет обеспечить географическую привязку подводного аппарата в пределах площади до 100 квадратных километров и протяженностью до 50 км.
Использование известного способа навигации подводных аппаратов требует значительных затрат судового времени, большого количества донных маяков-ответчиков с длительным сроком автономности. С учетом того что подводные маяки-ответчики подвержены влиянию гидрологических и литодинамических факторов, то для получения достоверных результатов навигации подводных объектов требуется калибровочные работы выполнять не только при установке и снятии подводных станций, но и в период их эксплуатации при изменении внешних факторов.
Кроме того, при проведении исследовательских работ с применением автономных или буксируемых подводных аппаратов в локальных зонах и при выполнении оперативно-тактических задач подводными аппаратами на ограниченных морских полигонах установка существенного количества маяков-ответчиков с экономической точки зрения не оправдана.
Известен также способ навигации подводного объекта посредством гидроакустической навигационной системы, содержащей навигационную базу из М гидроакустических приемоответчиков с различными частотами ответа и размещенного на объекте навигации гидроакустического приемопередатчика, посредством которого измеряют временные интервалы распространения сигналов с последующим их преобразованием в дистанции между подводным объектом и гидроакустическими приемоответчиками.
Согласно способу гидроакустические приемоответчики размещают на дрейфующих станциях по водной поверхности, навигационные параметры подводного объекта относительно дрейфующей станции или базы из дрейфующих станций определяют в режиме с длинной и/или ультракороткой базой, и/или в комбинированном режиме (длинная + ультракороткая база), и/или в пеленгационной системе, при этом формируют из приемников две навигационные базы с общим центром базы, располагая их в плоскости, параллельной плоскости палубы подводного объекта, при этом ось одной базы Х направлена вдоль осевой линии подводного объекта, а ось другой базы Y направлена по траверзу вправо (патент RU №2365939 [2]).
При реализации данного способа на поверхности моря размещается дрейфующая станция, снабженная соответствующей аппаратурой, и которая, находясь в дрейфе, имеет возможность непрерывно принимать сигналы среднеорбитных спутниковых навигационных систем, обрабатывать их с определением высокоточных собственных координат в любой момент времени. В определенный момент времени (по сигналу запроса с подводного объекта или по программе работы дрейфующей станции) эта информация передается по гидроакустическому каналу в виде шумоподобного кодированного сигнала определенного формата на подводный объект. Определив свои координаты относительно дрейфующей станции и имея информацию о географических координатах последней, подводный объект выполняет собственное координирование в географической системе координат.
Недостатком известного способа является то, что размещение на поверхности моря дрейфующей станции, снабженной соответствующей аппаратурой, и определение координат подводного объекта относительно дрейфующей станции отягощается сложной математической обработкой, связанной с исключением влияния гидрометеорологических факторов на дрейфующую станцию. При существенном влиянии гидрометеорологических факторов, имеющих место на границе атмосфера-гидросфера, дрейфующую станция может быть снесена на существенное расстояние от места проведения подводных работ, что будет вносить существенную погрешность в определение координат подводного объекта.
Задачей настоящего технического предложения является повышение надежности при обеспечении навигации подводных объектов с одновременным снижением трудоемкости. Поставленная задача решается за счет того, что в способе навигации подводного объекта посредством гидроакустической навигационной системы, содержащей навигационную базу из М гидроакустических приемоответчиков с различными частотами ответа и размещенного на объекте навигации гидроакустического приемопередатчика, посредством которого измеряют временные интервалы распространения сигналов с последующим их преобразованием в дистанции между подводным объектом и гидроакустическими приемоответчиками, гидроакустические приемоответчики размещают на станциях, размещенных на водной поверхности и донных станциях на морском дне, навигационные параметры подводного объекта относительно донных или/и дрейфующей станции или базы из дрейфующих станций определяют в режиме с длинной ультракороткой базой, и/или в пеленгационной системе, при этом формируют из приемников две навигационные базы с общим центром базы, располагая их в плоскости, параллельной плоскости палубы подводного объекта, при этом ось одной базы Х направлена вдоль осевой линии подводного объекта, а ось другой базы Y направлена по траверзу вправо, при обработке результатов измерений выполняют оценку среднего арифметического значения гидроакустической характеристики по пространственно-временным массивам наблюдений путем вычислений, в отличие от аналогов и прототипа на подводном объекте, дрейфующей станции и донной станции формируют центральный приемный массив из М гидрофонов, размещенных по осям Х и Y, на расстояниях 1-1,5 м от точки пересечения осей Х и Y по каждой оси размещают крайние гидрофоны, при этом принятые акустические сигналы, посредством крайних гидрофонов в каждой линейке гидрофонов, используют для точного измерения компонент направления прихода акустической волны, а принятые акустические сигналы М гидрофонами центральной части массива М гидрофонов используют для исключения ошибки на целое число длин волн при измерении полной разности фаз между крайними гидрофонами, дрейфующая станция соединена механически и электрически с донной станцией. В основу предлагаемого технического решения положен следующий теоретический принцип реализации способа навигации подводного объекта посредством гидроакустической навигационной системы.
Разность фаз α сигналов двух точечных приемников (первого и второго) с разнесением d при падении на них плоской волны с длиной λ под углом -π/2≤φ≤π/2 к нормали пары при d<λ/2 равна:

где - π/2<α<π/2. Направление прихода волны (пеленг) определяется формулой:

Отсюда следует, что при наличии погрешности δα измерения разности фаз и ошибки δd в продольном разнесении приемников погрешность δφ определения пеленга составляет:

где δσ=δd/d - относительная ошибка в продольном разнесении приемников.
Погрешность измерения разности фаз δα обусловлена помехами, связанными с отражениями волны от элементов конструкций, шумами океана, шумами судов, подводных аппаратов и механизмов, шумами электронных трактов и т.п. Обозначая через  и
и  векторы сигнала и помехи на приемнике, получаем, что вносимая помехой погрешность ε фазы сигнала равна:
векторы сигнала и помехи на приемнике, получаем, что вносимая помехой погрешность ε фазы сигнала равна:

Отсюда получаем, что среднеквадратичное значение ε составляет:

где q=s/n - отношение сигнал шум. Погрешность измерения разности фаз сигналов двух приемников равна:

Среднеквадратичная погрешность определения пеленга с учетом некоррелированности рассматриваемых погрешностей составляет:

Для повышения точности пеленга можно использовать третий приемник, расположенный на оси с имеющимися и образующий с первым пару с разнесением D>d. Если β+2πn - разность фаз первого и третьего приемников (-π/2<β<π/2, n - целое), то пеленг и его погрешность аналогично вышеизложенному определяются формулами:

где δs=δD/D - относительная ошибка в продольном разнесении первого и третьего приемников, δD - абсолютная.
Однако при измерении разности фаз целое число периодов n не фиксируется и для его определения используется специальная процедура, заключающаяся в следующем. Величина α умножается на D/d и результат приравнивается к β+2πn: α·(D/d)=β+2πn, откуда определяется ближайшее к целому значению n:

При этом среднеквадратичное отклонение оценки n от истинного значения при D>>d с учетом некоррелированности рассматриваемых погрешностей равно:

Отсюда следует, что максимальное отношение D/d при заданном δnc равно:

Очевидно, что определение значения n по данному алгоритму возможно при условии δn€[-1,2;1,2], которое выполняется при |δn|<(1/2)/3=1/6 с 99.7% вероятностью. Следовательно, при обеспечении 99.7% надежности максимально возможное значение δnc равно 1/6. В частности, для калиброванной системы (δσ=0) при q=10 имеем (D/d)max=7.4. Для некалиброванной системы с δσ=0.1 при q=10 и α=π имеем (D/d)max=3.
Для дальнейшего повышения точности определения пеленга можно использовать четвертый приемник, расположенный на оси с имеющимися и образующий с первым пару с разнесением L>D>d. Если γ+2πm - разность фаз первого и четвертого приемников (-π/2<γ<π/2, m - целое), то пеленг и его погрешность определяются формулами:

где δl=δL/L - относительная ошибка в продольном разнесении первого и четвертого приемников, δL - абсолютная.
Как и выше, при измерении разности фаз целое число периодов m не фиксируется и для его определения используется специальная процедура, заключающаяся в следующем. Величина β+2πn умножается на L/D и результат приравнивается к γ+2πm: (β+2πn)·(L/D)=γ+2πm, откуда определяется ближайшее к целому значению m:

При этом среднеквадратичное отклонение оценки m от истинного значения при δn=0 и L>>D с учетом некоррелированности рассматриваемых погрешностей равно:

где δΔ=δD/d. Отсюда следует, что максимальное отношение L/D при заданном δmc равно:

Очевидно, что определение значения m по данному алгоритму при δn=0 возможно при условии δn€[-1,2;1,2], которое выполняется при |δm|<(1/2)/3=1/6 с 99.7% вероятностью. Следовательно, при обеспечении 99.7% надежности максимально возможное значение δmc равно 1/6. Вероятность определения m с учетом флуктуации n очевидно равна (0.997)2×l00%=99.4%. В частности, для калиброванной системы (δΔ=0) при q=10 имеем (L/D)max=7.4. Для некалиброванной системы с δΔ=0.1 при q=10 и α=π имеем (L/D)max=3. Таким образом, для некалиброванной системы (L/d)max=9.
Сущность предлагаемого способа поясняется чертежами.
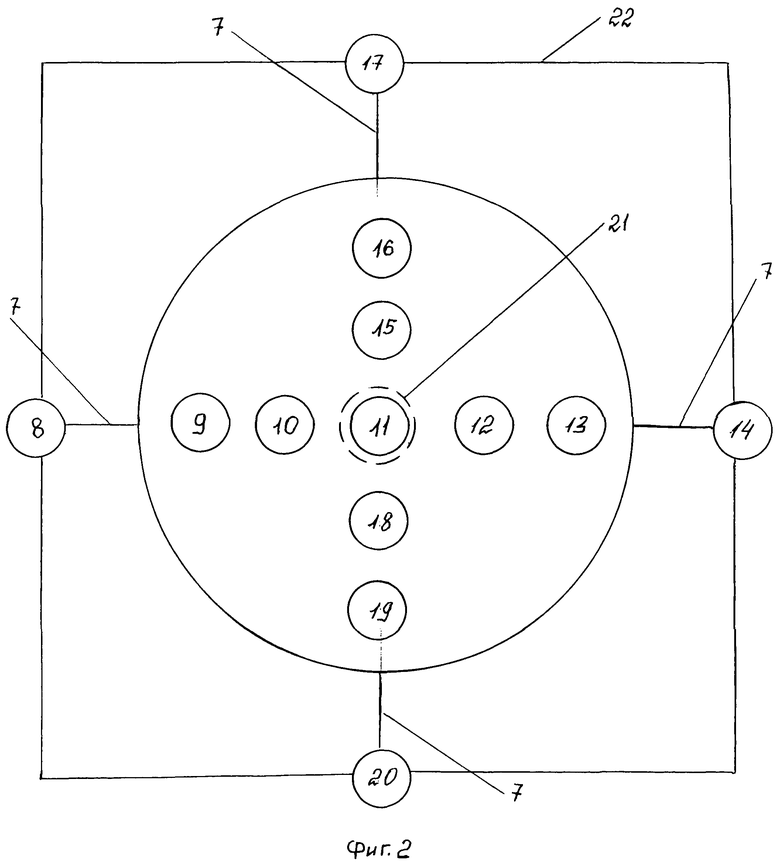
Фиг.1 - cхема формирования навигационной базы, где показаны навигационные спутники 1, подводный объект 2, дрейфующая станция 3, донные станции 4, кабель-трос 5.
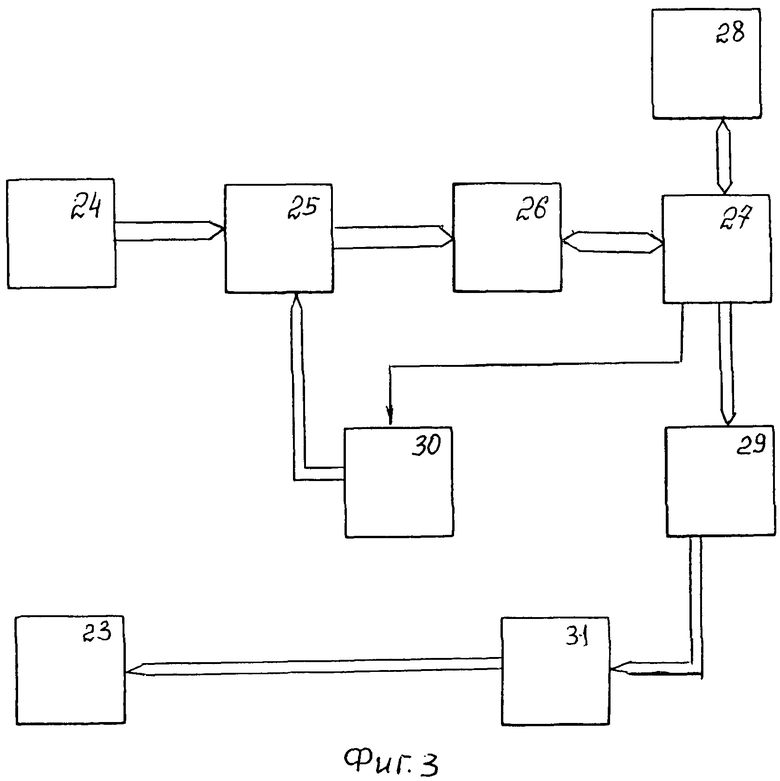
Фиг.2 - cхема размещения гидрофонов (приемников) антенны для приема гидроакустических сигналов. Схема включает стальную пластину 6, кронштейны 7, расположенные во взаимно перпендикулярных плоскостях, на которых размещены гидрофоны 8, 9, 10, 11, 12, 13, 14, 15. 16, 17, 18, 19, 20. Гидрофоны 9, 10, 11, 12, 13, 15, 16, 18 и 19 образуют центральный массив гидрофонов и установлены на стальной пластине 6, а гидрофоны 8, 14, 17 и 20 являются крайними гидрофонами, расположенными по осям Х и Y на кронштейне 7, и образуют излучатель. В месте установки гидрофона 11, в отдельном корпусе 21, установлены датчики определения скорости звука, гидродинамического давления и инерциальный датчик. Стальная пластина 6 установлена на кронштейнах 7, которые закреплены на раме 22.
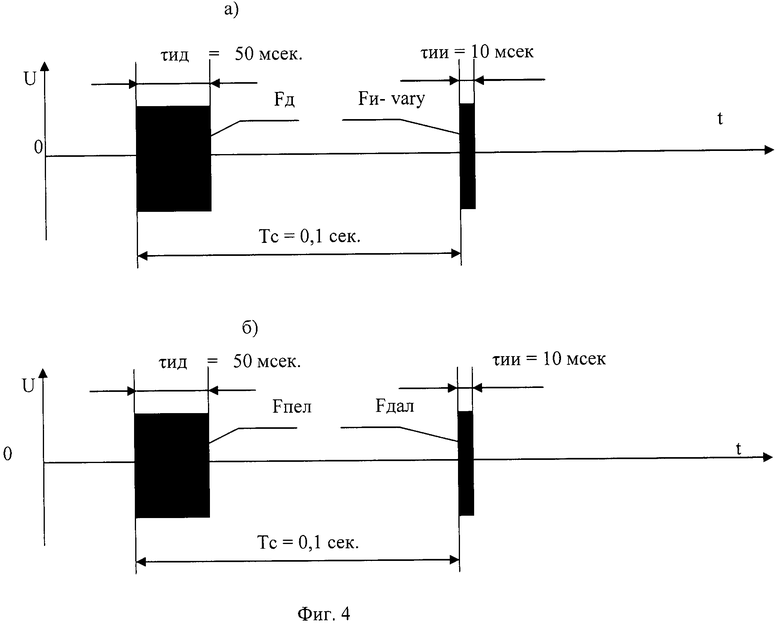
Фиг.3 - блок-схема устройства. Блок-схема включает излучатель 23, приемную гидроакустическую антенну 24, сформированную из гидрофонов 9, 10, 11, 12, 13, 15, 16, 18, 19 (фиг.2), фильтр-усилитель 25, АЦП 26, контроллер 27, навигационный процессор 28, коммутатор 29, генератор опорных сигналов 30, усилитель мощности 31. Фильтр-усилитель 25, АЦП 26, контроллер 27, навигационный процессор 28, коммутатор 29, генератор опорных сигналов 30, усилитель мощности 31 образуют блок электроники, установленный в защитном корпусе.
Фиг.4 - временные диаграммы сигналов «ЗАПРОС» (фиг.4а) и «ОТВЕТ» (фиг.4б).
Заявляемое техническое решение предназначено для определения координат подводных объектов относительно различных типов гидроакустических маяков-ответчиков в режиме с ультракороткой базой для последующего определения координат подводных объектов. Такими подводными объектами могут быть автономные и буксируемые подводные аппараты, различные подводные научно-исследовательские приборы и станции, устройства и механизмы, обеспечивающие разведку и добычу полезных ископаемых, и может быть использовано при проведении океанографических и геологических исследований, добыче полезных ископаемых и других видах подводных работ.
Гидроакустическая приемно-передающая антенна предназначена для работы в составе гидроакустической навигационной системы с ультракороткой базой (ГАНС-УКБ). Антенна предназначена для определения положения акустического маяка в определенном диапазоне дальностей относительно географических координат либо относительно корпуса судна-носителя и может быть выполнена в трех вариантах в зависимости от типа подводных аппаратов. Для подводных аппаратов типа «Мир» и «Звук-6» с диапазоном дальностей действия антенн - до 8000 м, подводного аппарата типа «Мезоскан-М» до 3000 м (аппараты типа Мезоскан-М) и для подводных аппаратов типа «Гном» и «Микросаунд» до 500 м соответственно.
В состав гидроакустической приемопередающей антенны входят многоканальная система приема, усилитель мощности, микроконтроллерный модуль управления и связи.
Гидроакустическая приемоизлучающая антенна обеспечивает излучение и прием сигналов, формат которых соответствует параметрам одного из маяков-ответчиков типа «МО-Д», «ГМО-6000», «ГМО-2000», «ГМО-200», и обеспечивает эквивалентную угловую точность не хуже 0.03° в режиме дальнего действия и 0.3° в режиме ближнего действия.
Инерциальный датчик представляет собой высокоточный инерциальный датчик для измерения наклонов и курса антенн типа гирокомпаса. В конкретной технической реализации применен датчик типа «U-PHINS» фирмы IXSEA.
Датчик скорости звука представляет собой циклический скоростемер, представляющий собой замкнутое через воду акустическое кольцо синхронизации, образованное двумя акустическими преобразователями, усилителем и импульсным генератором, запускаемым по сигналам с выхода усилителя (1. Гусев М.Н., Яковлев Г.В. Гидроакустические доплеровские лаги // Судостроение за рубежом, 1976, №5, с.53-57. 2. Судовые измерители скорости / А.А.Хребтов, В.Н.Кошкарев и др. - Судостроение, 1978, с.133).
Датчик гидродинамического давления представляет собой датчик, аналогом которого является датчик давления, приведенный в описании к патенту RU №2328757.
Каждая донная станция 4 соединена кабель-тросом 5 с дрейфующей станцией 3.
Кабель-торс 5 снабжен датчиками наклона и длины вытравленного троса. Наличие кабель-троса между донной 4 и дрейфующей 3 станциями позволяет контролировать перемещения дрейфующей 3 станции и ограничить ее перемещения относительно донной 4 станции.
На донных 4 и дрейфующих 3 станциях также установлены приемоизлучающая гидроакустическая антенна, предназначенная для преобразования акустических сигналов в электрические и преобразования электрических сигналов в акустические, и блок электроники.
В состав блока электроники входят:
- приемно-усилительное устройство, предназначенное для приема и усиления сигналов "ЗАПРОС", переданных с подводного объекта по гидроакустическому каналу связи;
- декодер сигнала "ЗАПРОС", который осуществляет декодирование сигнала "ЗАПРОС" и определяет момент прихода сигнала "ЗАПРОС";
- формирователь сигнала "ОТВЕТ", который предназначен для формирования сигнала "ОТВЕТ" после приема сигнала "ЗАПРОС";
- усилитель мощности, предназначенный для усиления до необходимого уровня сигнала "ОТВЕТ" с целью его передачи по гидроакустическому каналу связи;
- блок питания, который обеспечивает электропитанием все электронные узлы блока электроники.
При промышленной реализации заявляемого способа также возможно построение функциональных схем блока электроники на основе функциональных схем прототипа, а именно на основе функциональной схемы приема сигнала "включение", которая включает формирователь характеристики направленности, широкополосный фильтр с коррекцией амплитудно-частотной характеристики, ограничитель, узкополосный фильтр, детектор, интегратор, пороговую схему, а также на основе функциональной схемы обработки сигналов, которая включает широкополосный фильтр с коррекцией амплитудно-частотной характеристики, ограничитель, узкополосный фильтр, детектор, интегратор, пороговую схему, схему выбора максимума, и на основе спутникового связного модуля, который включает кодер, устройство формирования пакетов сообщений на передачу, устройство формирования алгоритма передачи пакетов сообщений, устройство управления с программой работы передатчика на излучение (3-8 раз/сутки), передающую антенну ненаправленного типа.
При установке нескольких дрейфующих 3 станций, соединенных кабель-тросом 5 с донными 4 станциями и размещенными на водной поверхности, средства связи могут также включать ретранслятор, который осуществляет прием радиосигнала от станции в диапазоне ДМВ (401-403 МГц), объединение с сигналами других станций, находящихся на поверхности, в общий групповой сигнал и одновременную передачу на наземные пункты приема в двух стволах диапазона СМВ (4/6, 7/8 ГГц), а при необходимости в состав средств связи может входить и береговая станция спутниковой связи, которая осуществляет прием излучаемого группового сигнала ретранслятора и содержит аппаратуру восстановления сообщений, включающую декодер и устройство обработки и восстановления сообщений, запоминающее устройство, устройство управления. Обработка сообщений включает помехоустойчивое кодирование, разбивку каждого сообщения на пакеты с длительностью, зависящей от состояния взволнованной поверхности, передачу пакетов сообщения на ретранслятор по алгоритму, автоматически формируемому в зависимости от морского волнения, которое определяется посредством спутниковой навигационной системы в соответствии с известными алгоритмами (см., например, описание к патенту РФ №2254600).
Применение станций, расположенных на поверхности и оснащенных GPS приемником и аппаратурой гидроакустического канала связи, в качестве навигационных маяков, расположенных на морской поверхности, позволяет обеспечить высокоточную навигацию для подводных объектов.
Подводный объект оснащается соответствующими режиму работ гидроакустическими приемо-передающими антеннами, навигационным контроллером и навигационным программно-математическим обеспечением. Работа гидроакустической навигационной системы может осуществляться в режиме «запрос-ответ» и в режиме «пингер» (маяк). При навигации подводного объекта при его работе на глубинах более одного километра целесообразно работать на частотах в диапазоне от 8 до 15 кГц, при этом энергетическая дальность связи с маяком-дрифтером будет достигать 10-14 км, а погрешность определения координат аппарата составит 7-10 метров в режиме ДБ и 0,3% от дальности в режиме УКБ и 0,5 град по углу пеленгации. При рабочей глубине менее одного километра целесообразно использовать рабочие частоты в диапазоне 25-35 кГц и работать в режиме УКБ. При этом максимальная дальность связи будет достигать порядка 3 км.
Дополнительные возможности по обеспечению оперативной навигации подводного объекта дает установка (запуск) маяка непосредственно с подводного объекта в необходимый момент времени по каналу гидроакустической связи. Наличие средств измерения датчиков измерения скорости звука и гидродинамического давления на горизонте установки антенны позволяет измерять профиль скорости звука и гидрологические параметры, что необходимо при расчете точных координат подводного объекта. Станция, размещенная на поверхности, работает в режиме приема спутниковых сигналов системы GPS и передачи гидроакустических сигналов на подводный объект в режиме «запрос-ответ» или режиме «пингер». Подводный объект фиксирует дистанцию и пеленг до маяка-дрифтера (режим УКБ) и вычисляет свои точные географические координаты, используя информацию, принятую от маяка-дрифтера по гидроакустическому каналу связи. Скорость передачи по гидроакустическому каналу связи может составлять 9600-12400 бод. Наиболее оптимальная дальность связи в режиме УКБ при глубине подводного объекта до 500 м составляет 1 км. Точность определения координат до 5 м.
Наличие гидроакустического канала связи между станцией, находящиеся на поверхности, и подводным объектом позволяет также обеспечивать передачу служебной информации из наземного центра на подводный объект по спутниковому телеметрическому связному каналу через станцию, находящуюся в зоне гидроакустической связи с подводным объектом.
В предлагаемом способе применена комбинированная система гидроакустической навигации с длинной и ультракороткой базой, которая позволяет использовать пеленгационную систему решения задачи выхода подводного объекта в точку установки дрейфующей станции. При этом гидроакустическая антенна подводного объекта представляет две имеющие общий центр базы из приемников. При этом, если две приемные базы расположены в плоскости, параллельной плоскости палубы, и ортогональны, ось одной базы направлена вдоль осевой линии подводного объекта, а ось другой базы направлена по траверзу вправо.
Две имеющие общий центр базы из приемников позволяют определить направление на источник сигнала как линию пересечения двух конических поверхностей с совпадающими вершинами [2].
Приемная часть приемопередающей гидроакустической антенны состоит из тринадцати гидрофонов, девять из которых образуют центральную часть массива гидрофонов и установлены на металлической плите 6, а остальные четыре гидрофона являются крайними, расположенными соответственно по осям Х и Y и на линейном несущем кронштейне 7. Расстояние между приемными гидрофонами, образующими центральный массив, составляет 50 мм. Разнесение крайних гидрофонов на кронштейне 7 составляет 1500 мм. Кронштейн 7 перфорирован, что позволяет располагать гидрофоны (приемники) в непосредственной близости друг от друга для проведения фазовой калибровки и с произвольным разнесением для проведения измерений направления прихода акустического сигнала. В качестве приемников-гидрофонов использованы пьезокерамические цилиндры диаметром 10 мм, внутри которых размещены предварительные усилители с коэффициентом усиления 30 дБ. Цилиндры размещаются на стальной пластине диаметром 40 мм, снабженной элементами крепления и акустической заглушкой с тыльной стороны. Коэффициент подавления звукового сигнала с тыльной стороны составляет не менее 30 дБ.
Когда все гидрофоны производят прием на одной и той же рабочей частоте, реализуется режим определения задержки и направления прихода отклика от фиксированной дрейфующей 3 или донной 4 станции в режиме ультракороткой базы, а когда каждый из гидрофонов настроен на свою рабочую частоту, осуществляется режим измерения задержек от нескольких дрейфующих 3 и донных 4 станций в режиме длинной базы.
Система передачи информации по гидроакустическому каналу на подводном объекте реализуется с использованием штатных средств гидроакустической связи. При этом в качестве устройств формирования и обработки сигналов могут быть применены как имеющаяся в составе гидроакустическая аппаратура, обеспечивающая режим гидроакустической связи, так и дополнительные устройства в виде приставок, подключаемых к их передающему и приемному трактам.
В качестве сигналов местоположения использованы тональные сигналы с частотой 3 кГц, излучаемые как в автоматическом режиме по специальной программе, так и в режиме запроса.
Для систем передачи информации, основанных на использовании тональных сигналов, помехоустойчивость системы определяется помехоустойчивостью обнаружителей сигнала "Включение" и обнаружителей информационных сигналов. Для обнаружения сигнала "Включение", представляющего собой отрезок гармонического колебания длительностью, использован метод неоптимального некогерентного приема, обеспечивающий широкополосный прием с интегрированием после детектора.
Функциональная схема сигнала «Включение» аналогична функциональной схеме прототипа [2] и включает формирователь характеристики направленности, обеспечивающий предварительное усиление и формирование ненаправленного пространственного канала с антенны дрейфующей 3 станции, широкополосный фильтр с полосой Fш, ограничитель и узкополосный фильтр с полосой Fу, образующую схему, обеспечивающую, при условии Fш/Fу>>l, стабилизацию помехи и подавления импульсной (широкополосной) помехи и выравнивание спектра помехи на входе ограничителя, узкополосный фильтр, обеспечивающий формирование рабочих частот, детектор, имеющий линейную характеристику, интегратор, представляющий собой фильтр нижних частот с эффективной полосой пропускания Fu=1/T, где Т=2 с (длительность символа), пороговую схему, построенную на основании критерия Неймана-Пирсона, поскольку вероятность появления на ее входе сигнала существенно ниже вероятности его отсутствия.
Функциональная схема обработки сигнала также аналогична функциональной схеме прототипа [2] и включает широкополосный фильтр с полосой Fш, ограничитель и узкополосный фильтр с полосой Fу, которые образуют схему, обеспечивающую, при условии Fш/Fу>>l, стабилизацию помехи и подавления импульсной (широкополосной) помехи и выравнивание спектра помехи на входе ограничителя, детектор, имеющий линейную характеристику, интегратор, который представляет собой фильтр нижних частот с эффективной полосой пропускания Fu=1/T, где Т=0,5 с (длительность символа), схему выбора максимума, обеспечивающую отбор максимального сигнала для последующего сравнения его с заданным порогом, решающую схему, построенную на основании критерия идеального наблюдателя, поскольку весомость ошибок типа "ложная тревога" и "пропуск сигнала" можно считать одинаковой, порог в схеме выбран из условия минимизации полной вероятности ошибки, при этом после превышения порога в схему выбора максимума поступает команда, отключающая канал с максимальным сигналом. Таким образом, обработка сигнала при приеме сообщения сводится к обнаружению отдельных тональных сигналов с вероятностями F и D такими, чтобы сумма F+(1-D) не превышала 0,01, причем F+1-D. Аналогом спутникового связного модуля дрейфующей 3 станции является спутниковый связной модуль якорного буй прибрежного мониторинга фирмы AANDERAA Instruments (Норвегия) [3].
Спутниковый связной модуль предназначен для формирования пакетов и алгоритмов управления передаваемой информации.
Дрейфующая 3 станция может быть также выполнена в форме корпуса аварийного буя, применяемого на подводных лодках.
В отличие от известного способа в предлагаемом способе дрейфующая станция, снабженная соответствующей аппаратурой, находясь в ограниченном дрейфе, имеет возможность непрерывно принимать сигналы среднеорбитных спутниковых навигационных систем, обрабатывать их с определением высокоточных собственных координат в любой момент времени. В определенный момент времени (по сигналу запроса с подводного объекта или по программе работы дрейфующей станции) эта информация передается по гидроакустическому каналу в виде шумоподобного кодированного сигнала определенного формата на подводный объект. Определив свои координаты относительно дрейфующей и донных станций и имея информацию о географических координатах дрейфующей станции, подводный объект выполняет собственное координирование в географической системе координат. При этом благодаря тому, что центральный приемный массив состоит из двух линеек гидрофонов, а крайние гидрофоны разнесены от центра центрального приемного массива на расстояние 1-1,5 м, то крайние гидрофоны в каждой линейке используются для точного измерения компонент направления прихода акустической волны, а центральная часть массива - для исключения ошибки на целое число длин волн при измерении полной разности фаз между крайними гидрофонами, что позволяет уменьшить погрешность определения координат подводного объекта и повысить надежность определения координат подводного объекта относительно различных типов гидроакустических маяков-ответчиков в режиме с ультракороткой базой. Такими объектами могут быть автономные и буксируемые подводные аппараты, различные подводные научно-исследовательские приборы и станции, устройства и механизмы, обеспечивающие разведку и добычу полезных ископаемых. Заявляемое техническое решение может быть использовано при проведении океанографических и геологических исследований, добыче полезных ископаемых и других видах подводных работ.
Источники информации
1. Патент RU №2032187.
2. Патент RU №2365939.
3. Официальный сайт компании "Компания ИНФОРМАР" www.infomarcompany.com.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2463624C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2444759C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА | 2008 |
|
RU2365939C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2371738C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2431156C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2010 |
|
RU2451300C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ В НАВИГАЦИОННОМ ПОЛЕ ПРОИЗВОЛЬНО РАССТАВЛЕННЫХ ГИДРОАКУСТИЧЕСКИХ МАЯКОВ-ОТВЕТЧИКОВ | 2011 |
|
RU2483326C2 |
| СПОСОБ ПРОКЛАДКИ МОРСКИХ ПОДВОДНЫХ КАБЕЛЕЙ | 2010 |
|
RU2444827C1 |
| ПОДВОДНЫЙ ЗОНД | 2008 |
|
RU2370787C1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
Изобретение относится к области подводной навигации, а именно к определению координат подводного объекта. Согласно способу посредством навигационной базы из М гидроакустических приемоответчиков с различными частотами ответа и размещенного на объекте навигации гидроакустического приемопередатчика измеряют временные интервалы распространения сигналов с последующим их преобразованием в дистанции между подводным объектом и гидроакустическими приемоответчиками. На подводном объекте, дрейфующей станции и донной станции формируют центральный приемный массив из М гидрофонов, размещенных по осям Х и Y, на расстояниях 1-1.5 м от точки пересечения осей Х и Y по каждой оси размещают крайние гидрофоны, при этом принятые акустические сигналы посредством крайних гидрофонов в каждой линейке гидрофонов используют для точного измерения компонент направления прихода акустической волны, а принятые акустические сигналы М гидрофонами центральной части массива М гидрофонов используют для исключения ошибки на целое число длин волн при измерении полной разности фаз между крайними гидрофонами, дрейфующая станция соединена механически и электрически с донной станцией. 4 ил.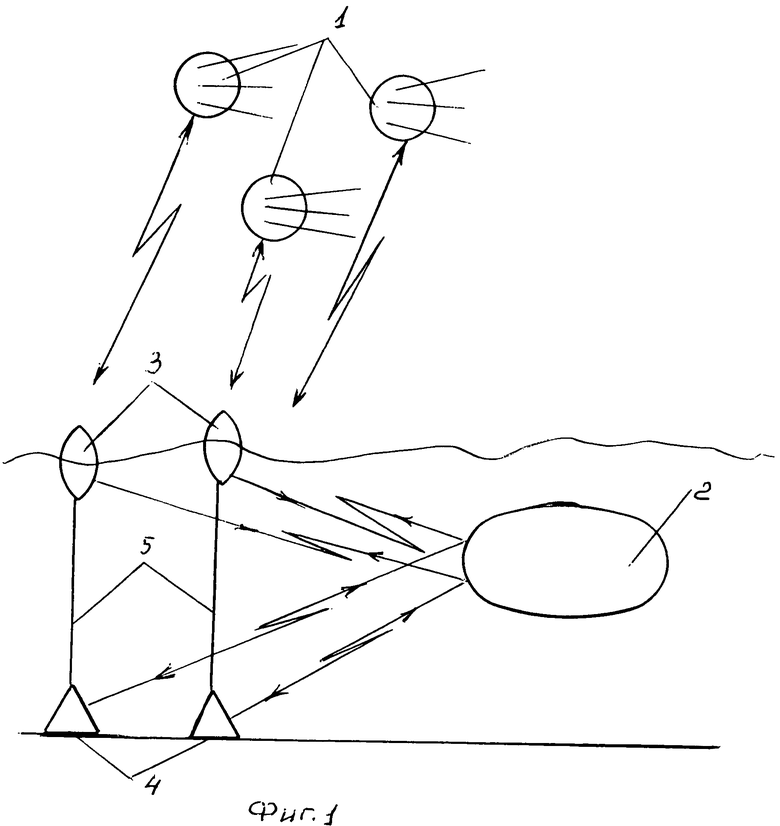
Способ навигации подводного объекта посредством гидроакустической навигационной системы, содержащей навигационную базу из М гидроакустических приемоответчиков с различными частотами ответа и размещенного на объекте навигации гидроакустического приемопередатчика, посредством которого измеряют временные интервалы распространения сигналов с последующим их преобразованием в дистанции между подводным объектом и гидроакустическими приемоответчиками, гидроакустические приемоответчики размещают на станциях, размещенных на водной поверхности, и донных станциях на морском дне, навигационные параметры подводного объекта относительно донных или/и дрейфующей станции или базы из дрейфующих станций определяют в режиме с длинной, ультракороткой базой и/или в пеленгационной системе, при этом формируют из приемников две навигационные базы с общим центром базы, располагая их в плоскости, параллельной плоскости палубы подводного объекта, при этом ось Х одной базы направлена вдоль осевой линии подводного объекта, а ось Y другой базы направлена по траверзу вправо, при обработке результатов измерений выполняют оценку среднего арифметического значения гидроакустической характеристики по пространственно-временным массивам наблюдений путем вычислений, отличающийся тем, что на подводном объекте, дрейфующей станции и донной станции формируют центральный приемный массив из М гидрофонов, размещенных по осям Х и Y, на расстояниях 1-1,5 м от точки пересечения осей Х и Y по каждой оси размещают крайние гидрофоны, при этом принятые акустические сигналы посредством крайних гидрофонов в каждой линейке гидрофонов используют для точного измерения компонент направления прихода акустической волны, а принятые акустические сигналы М гидрофонами центральной части массива М гидрофонов используют для исключения ошибки на целое число длин волн при измерении полной разности фаз между крайними гидрофонами, дрейфующая станция соединена механически и электрически с донной станцией.
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА | 2008 |
|
RU2365939C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2371738C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2005 |
|
RU2308054C2 |
| US 5331602 A, 19.07.1994 | |||
| JP 7012933 A, 17.01.1995 | |||
| US 2006235583 A1, 19.10.2006. | |||

