Изобретение относится к радиолокации и может быть использовано в радионавигации, метеорологии, геодезии и других областях.
Известен доплеровский радиопеленгатор [1]. Недостатком устройства является невозможность определения местоположения цели по угломерным данным.
Известно устройство пассивной локации движущегося объекта [2]. Недостатком устройства также является невозможность определения местоположения цели по угломерным данным.
Наиболее близким по технической сущности к заявляемому изобретению является подвижный пеленгатор [3], позволяющий определять местоположение цели по угломерным данным на основе априорных сведений о характере движения, содержащий синхронизатор, устройство формирования пеленгов, блок вычисления коэффициентов, буферное запоминающее устройство, блок решения систем линейных алгебраических уравнений, блок медианных фильтров, блок определения местоположения, блок инерциальной системы навигации, устройство отображения, при этом первый выход устройства формирования пеленгов соединен с первым входом блока вычисления коэффициентов, выход которого соединен с первым входом буферного запоминающего устройства, выход которого соединен с первым входом блока решения систем линейных алгебраических уравнений, выход которого через блок медианных фильтров соединен с первым входом блока определения местоположения, выход которого через устройство отображения соединен с выходом устройства, выход блока инерциальной системы навигации соединен со вторым входом блока вычисления коэффициентов, первый и второй выходы синхронизатора соединены соответственно со вторыми входами буферного запоминающего устройства и блока решения систем линейных алгебраических уравнений, первый выход устройства формирования пеленгов соединен со вторым входом блока определения местоположения, первый выход устройства формирования пеленгов соединен со входом синхронизатора.
Недостатком прототипа являются ограниченные функциональные возможности, так как устройство [3] не позволяет определить местоположение цели по угломерным данным для криволинейной модели движения.
Задача изобретения - расширение функциональных возможностей устройства [3], содержащего устройство формирования пеленгов, буферное запоминающее устройство, блок решения систем линейных алгебраических уравнений, устройство отображения, блок инерциальной системы навигации, синхронизатор, за счет введения вычислителя-формирователя, блока оценивания, блока вычисления декартовых координат цели.
Предлагается подвижный пеленгатор, содержащий устройство формирования пеленгов, буферное запоминающее устройство, блок решения систем линейных алгебраических уравнений, устройство отображения, блок инерциальной системы навигации, синхронизатор, вычислитель-формирователь, блок оценивания, блок вычисления декартовых координат цели, при этом первый выход устройства формирования пеленгов соединен с первым входом вычислителя-формирователя, выход которого соединен с первым входом буферного запоминающего устройства, выход которого соединен с первым входом блока решения систем линейных алгебраических уравнений, выход которого через блок оценивания соединен с первым входом блока вычисления декартовых координат цели, выход которого через устройство отображения соединен с выходом устройства, выход блока инерциальной системы навигации соединен со вторым входом вычислителя-формирователя, первый и второй выходы синхронизатора соединены соответственно со вторыми входами буферного запоминающего устройства и блока решения систем линейных алгебраических уравнений, первый выход устройства формирования пеленгов соединен со вторым входом блока вычисления декартовых координат цели, второй выход устройства формирования пеленгов соединен со входом синхронизатора, при этом первая шина первого входа вычислителя-формирователя соединена со входом первого преобразователя кодов, вторая шина первого входа соединена со входами второго и третьего преобразователей кодов, выходы первого и второго преобразователей кодов соединены соответственно с первым и вторым входами первого перемножителя, первая шина второго входа соединена с первыми входами второго и третьего перемножителей, вторая и третья шины второго входа соединены с первыми входами первого и второго сумматоров соответственно, третья шина первого входа вычислителя-формирователя соединена со входами четвертого . . . (K+4)-го преобразователей кодов, выходы четвертого ... (K+4)-го преобразователей кодов соединены соответственно с первыми входами четвертого ... (K+4)-го и (K+5)-го ... (2K+5)-го перемножителей, выход первого перемножителя соединен со вторыми входами, третьего, четвертого, ... (K+4)-го перемножителей, выходы второго и третьего перемножителей соединены со вторыми входами первого и второго сумматоров соответственно, выход третьего преобразователя кодов соединен со вторыми входами второго, (K+5)-го, ... (2K+5)-го перемножителей, выход вычислителя-формирователя образуют выходы первого, четвертого, ... (K+4)-го, (K+5)-го, (2K+5)-го перемножителей, выходы третьего, четвертого, ... (K+4)-го преобразователей кодов, выходы первого и второго сумматоров, первый 11 ... (3K+3)-й 13K+3 входы блока оценивания через медианные фильтры соединены соответственно с первым 11 ... (3K+3)-м 13K+3 выходами, первая 11 ... 3K-я 13K шины первого входа блока 6 соединены с первыми входами первого 211 ... 3K-го 23K перемножителей, выходы первого 211 .. . K-го 21K перемножителей соединены соответственно с первым 1 ... K-м K входами первого 24 сумматора, выходы (K+1)-го 221 ... 2K-го 22K перемножителей соединены соответственно с первым 1 ... K-м K входами второго 25 сумматора, выходы (2K+1)-го 231 ... 3K-го 23K перемножителей соединены соответственно с первым 1 . . . K-м K входами третьего 26 сумматора, (3K+1)-я 13K+1 ... (3K+3)-я 13K+3 шины первого входа соединены соответственно с (K+1)-ми K+1 входами первого 24 ... третьего 26 сумматоров, выходы которых первый 11 ... третий 13 образуют выход блока 6.
Как следует из описания совокупности признаков заявляемого изобретения, новизна решения задачи состоит во введении вычислителя-формирователя, блока оценивания, блока вычисления декартовых координат цели, что позволяет обеспечить определение параметров не только равномерного прямолинейного движения цели, но и криволинейных траекторий.
На фиг. 1 представлена структурная схема подвижного пеленгатора. Он содержит устройство формирования пеленгов 1, вычислитель-формирователь 2, буферное запоминающее устройство 3, блок решения систем линейных алгебраических уравнений 4, блок оценивания 5, блок вычисления декартовых координат цели 6, устройство отображения 7, блок инерциальной системы навигации 8, синхронизатор 9.
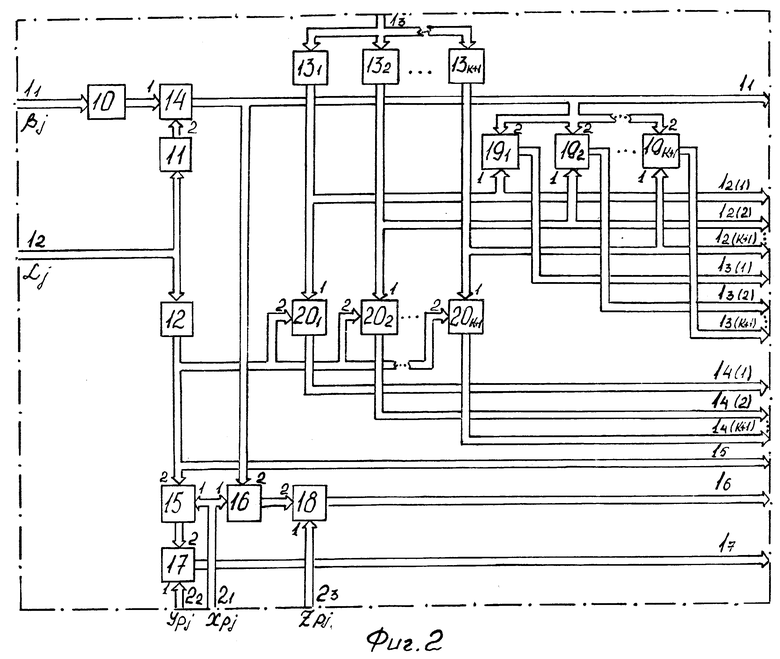
На фиг. 2 представлена функциональная схема вычислителя-формирователя 2. Он содержит первый 10, второй 11, третий 12, четвертый 131 ... (K+4)-й 13K+1 преобразователи кодов, первый 14, второй 15, третий 16, четвертый 191 ... (K+4)-й 19K+1 и (K+5)-й 201 ... (2K+5)-й 20K+1 перемножители, первый 17 и второй 18 сумматоры.
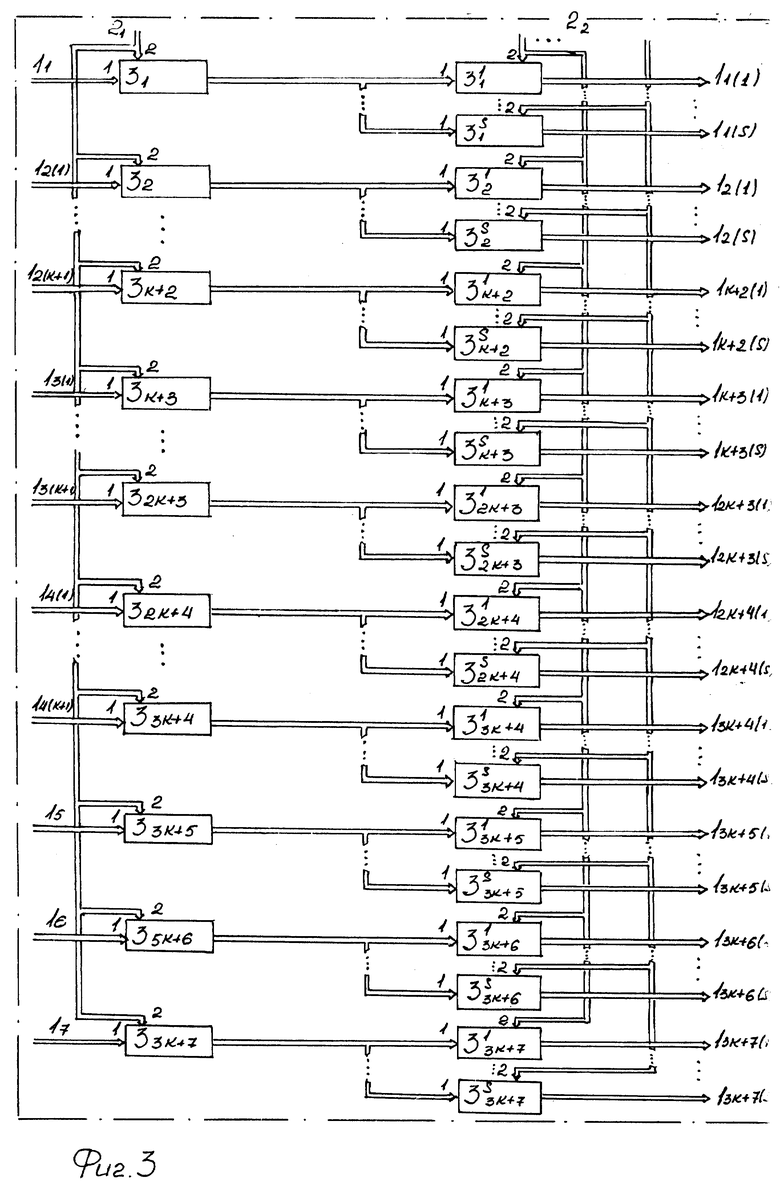
На фиг. 3 представлена схема возможной реализации буферного запоминающего устройства 3, которое состоит из 3K+7 сверхоперативных запоминающих устройств (СОЗУ) 31 ... 33K+7 и (3K+7)S (где S = [(3K+3)/2)], [•] - целое число) регистров 3
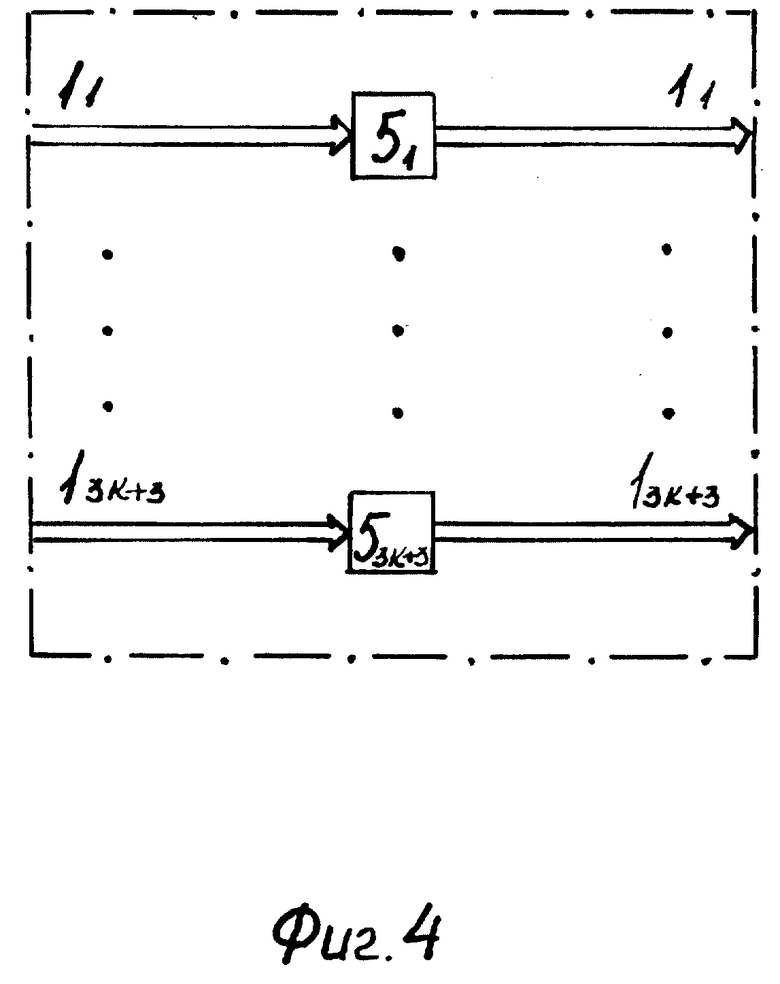
На фиг. 4 представлена схема возможной реализации блока оценивания 5. Он содержит 3K+3 медианных фильтров 51 ... 53K+3.
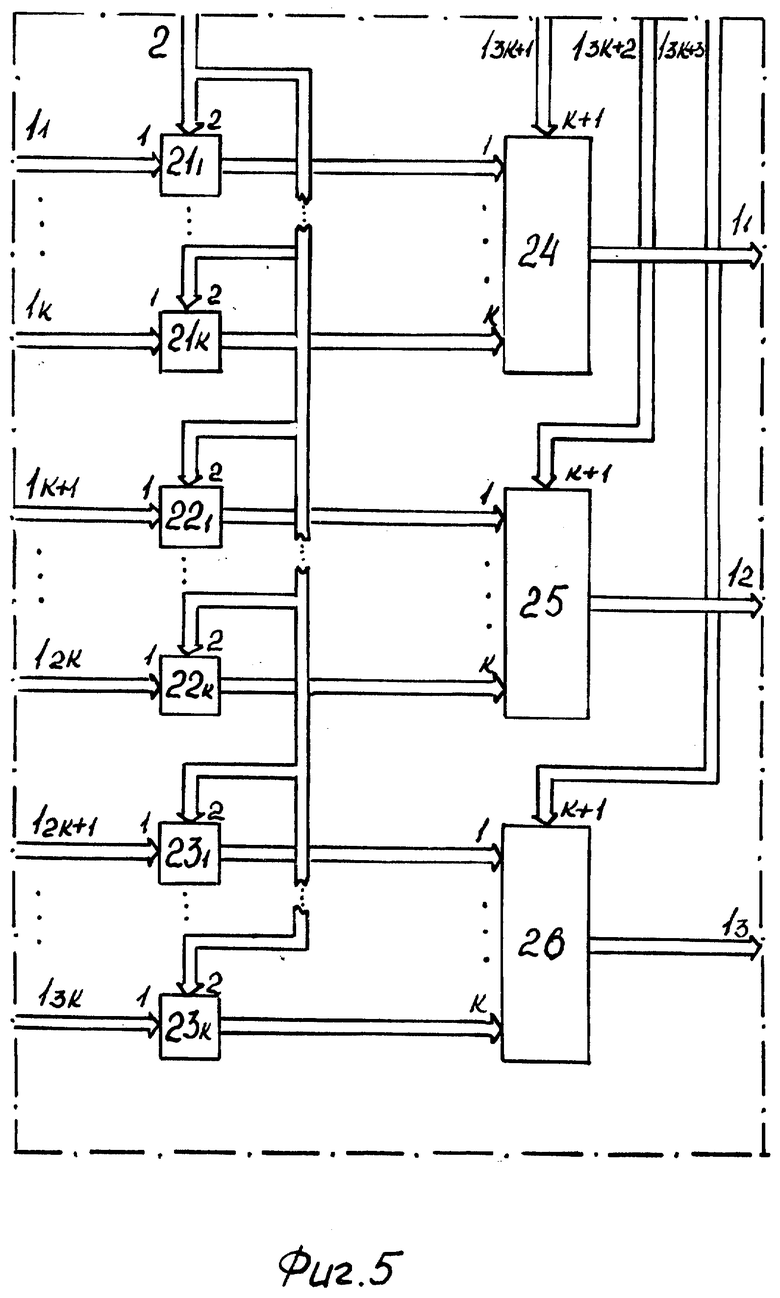
На фиг. 5 представлена схема возможной реализации блока вычисления декартовых координат цели 6. Он содержит первый 211 ... 3K-й 23K перемножители, первый 24 ... третий 26 сумматоры.
На фиг. 6 представлена схема возможной реализации синхронизатора 9. Он содержит первый 27, второй 28, третий 29, четвертый 39, пятый 41 счетчики, первый 301 ... S-ый 30S сумматоры, первый 311 ... (S-1)-й 31S-1 преобразователи кодов, первый 32 и второй 33 мультиплексоры, первый 34 и второй 45 элементы задержки, триггер 35, компаратор 36, регистр 37, первую 38 и вторую 43 схемы И, генератор тактовых импульсов (ГТИ) 40, дешифратор 42, схему ИЛИ 44.
На фиг. 1 первый выход устройства формирования пеленгов 1 соединен с первым входом вычислителя-формирователя 2, выход которого соединен с первым входом буферного запоминающего устройства (БЗУ) 3, выход которого соединен с первым входом блока решения систем линейных алгебраических уравнений (БРСЛАУ) 4, выход БРСЛАУ 4 через блок оценивания 5 соединен с первым входом вычисления декартовых координат цели 6, выход которого через устройство отображения 7 соединен с выходом устройства, выход блока инерциальной системы навигации 8 соединен со вторым входом вычислителя-формирователя 2, первый и второй выходы синхронизатора 9 соединены соответственно со вторыми выходами БЗУ 3 и БРСЛАУ 4, второй выход устройства формирования пеленгов 1 соединен со входом синхронизатора 9.
На фиг. 2 первая шина 11 первого входа вычислителя-формирователя соединена со входом первого преобразователя кодов 10, вторая шина 12 первого входа вычислителя-формирователя соединена со входами второго 11 и третьего 12 преобразователей кодов, выходы первого 10 и второго 11 преобразователей кодов соединены с первым и вторым входами первого перемножителя 14 соответственно. Первая шина 21 второго входа вычислителя-формирователя соединена с первыми входами второго 15 и третьего 16 перемножителей, вторая 22 и третья 23 шины второго входа вычислителя-формирователя соединены с первыми входами первого 17 и второго 18 сумматоров соответственно. Третья шина 13 первого входа блока соединена со входами четвертого 131 ... (K+4)-го 13K+1 преобразователей кодов, выходы четвертого 131 ... (K+4)-го 13K+1 преобразователей кодов соединены соответственно с первыми входами четвертого 191 ... (K+4)-го 19K+1 и (K+5)-го 201 ... (2K+5)-го 20K+1 перемножителей, выход первого перемножителя 14 соединен со вторыми входами третьего 16, четвертого 191 ... (K+4)-го 19K+1 перемножителей, выходы второго 15 и третьего 16 перемножителей соединены со вторыми входами первого 17 и второго 18 сумматоров соответственно, выход третьего преобразователя кодов 12 соединен со вторыми входами второго 15, (K+5)-го 201 ... (2K+5)-го 20K+1 перемножителей, выход вычислителя-формирователя 2 образуют выходы первого 14, четвертого 191 ... (K+4)-го 19K+1, (K+5)-го 201 . .. (2K+5)-го 20K+1 перемножителей, выходы третьего 12, четвертого 131 ... (K+4)-го 13K+1 преобразователей кодов, выходы первого 17 и второго 18 сумматоров.
На фиг. 3 первая 11 ... (3K+7)-я 13K+7 шины первого входа БЗУ 3 являются первыми входами соответственно первого 31 ... (3K+7)-го 33K+7 СОЗУ. Выходы СОЗУ 31 . . . 33K+7 соединены соответственно с первыми входами регистров 3
Первая шина второго входа 21 соединена со вторыми входами первого 31 ... (3K+7)-го 33K+7 СОЗУ. Вторая шина второго входа 22 соединена со вторыми входами первого 3
На фиг. 4 входы 11 ... 13K+3 через медианные фильтры 51 ... 53K+3 соединены соответственно с выходами 11 ... 13K+3 блока 5.
На фиг. 5 первая 11 ... 3K-я 13K шины первого входа блока 6 соединены с первыми входами первого 211 ... 3K-го 23K перемножителей, выходы первого 211 . . . K-го 21K перемножителей соединены соответственно с первым 1 ... K-м K входами первого 24 сумматора, выходы (K+1)-го 221 ... 2K-го 22K перемножителей соединены соответственно с первым 1 ... K-м K входами второго 25 сумматора, выходы (2K+1)-го 231 ... 3K-го 23K перемножителей соединены соответственно с первым 1 ... K-м K входами третьего 26 сумматора, (3K+1)-я 13K+1 . . . (3K+3)-я 13K+3 шины первого выхода соединены соответственно с (K+1)-ми K+1 входами первого 24 ... третьего 26 сумматоров, выходы которых первый 11 ... третий 13 образуют выход блока 6.
На фиг. 6 вход синхронизатора 9 соединен со счетным входом первого счетчика 27, через первый элемент задержки 34 с первым входом триггера 35, со вторым входом триггера 35, через второй элемент задержки 45 со вторым входом элемента ИЛИ 44, со счетным входом второго счетчика 28, выход которого соединен со счетным входом третьего счетчика 29, выход которого соединен со вторыми входами регистра 37 и компаратора 36, с первым входом первого сумматора 301, а также через первый 311 ... (S-1)-й 31S-1 умножители частоты с первыми входами второго 302 ... S-го 30S сумматоров, выходы первого 301 ... S-го 30S сумматоров соединены соответственно с первым 1 ... S-м S входами мультиплексора 32, выход которого соединен с первым входом второго мультиплексора 33. Первый выход триггера 35 соединен с третьим входом второго мультиплексора 33 и со вторым входом второго элемента И 43, выход которого соединен с первым входом элемента ИЛИ 44. Выход генератора тактовых импульсов 40 соединен со вторым входом первого элемента И 38, с первым входом второго элемента И 43, с первым входом четвертого счетчика 39, выход которого соединен с первым входом пятого счетчика 41, со входом дешифратора 42, а также с (S+1)-м входом первого мультиплексора 32, второй выход триггера 35 соединен с четвертым входом второго мультиплексора 33. Выход первого элемента И 38 соединен с первым входом регистра 37, выход которого соединен с первым входом компаратора 36, выход которого соединен с первым входом элемента И 38, вторым входом четвертого счетчика 39, вторым входом пятого счетчика 41, выход которого соединен со вторыми входами первого 301 ... S-го 30S сумматоров, выход первого счетчика 27 соединен со вторым входом второго мультиплексора 33. Выход второго мультиплексора 33, первый и второй выходы триггера 35, выход элемента ИЛИ 44, выход дешифратора 42 образуют соответственно шины 11 . . . 15 первого выхода синхронизатора 9. Выход четвертого счетчика 39 образует второй выход синхронизатора 9.
Заявленное устройство реализует метод оценивания параметров криволинейных траекторий на базе высокоточных измерений подвижного пеленгатора, с использованием полиномиальных моделей движения объекта [4]. В декартовой XYZ системе координат положение пеленгатора задается вектором
Yp(t) = [xp(t), yp(t), zp(t)]T,
а цели
Yc(t) = [xc(t), yc(t), zc(t)]T.
Движение цели определяется следующей моделью:
где
xc(t), yc(t), zc(t) - декартовы координаты цели;
a
С учетом связи декартовой системы координат с радиотехнической справедливы следующие соотношения:
(2) Yc(t) = Yp(t) + Ycp(t),
где
Ycp(t) = [xcp(t), ycp(t), zcp(t)]T;
xcp(t) = R(t)cosα(t)cosβ(t);
ycp(t) = R(t)cosβ(t)sinα(t);
zcp(t) = R(t)sinβ(t);
xp, yp, zp - декартовы координаты подвижного пеленгатора;
R(t),α(t),β(t) - соответственно наклонная дальность, азимут и угол места цели в радиотехнической системе координат, связанной с подвижным пеленгатором.
Используя подход, разработанный в [4, 5], запишем
С учетом (1) и (2) несложно получить
где
Переписав (3) в виде
можно использовать их для определения коэффициентов модели (1). Однако следует учитывать, что в системе уравнений (4) независимыми являются два уравнения, поэтому, воспользовавшись, например, первыми двумя уравнениями системы (4), можно записать
(5) BA = D,
где



αj= α(tj), βj= β(tj), S = [(3K+3)/2],
[•] - целая часть числа.
Искомый вектор параметров модели (1), находится как решение системы линейных алгебраических уравнений (5)
(6) A = B-1D,
где
B-1 - матрица обратная B.
Решая (6) требуемое число раз для различных наборов временных замеров пеленгов цели, можно получить искомый вектор параметров. Задача оценивания параметров модели (1) по угломерным данным подвижного пеленгатора наблюдаема, если закон движения последнего не является прямолинейным равномерным. Доказательство данного утверждения подробно приведено в [4].
Таким образом, как следует из выражений (1) - (6), введение новых структурных элементов и связей позволяет в совокупности с общими признаками получить технический результат состоящий в обеспечении возможности определения местоположения объекта по угломерным данным, поступающим от подвижного пеленгатора для криволинейных траекторий с использованием полиномиальных моделей движения объектов.
Подвижный пеленгатор (фиг. 1) работает следующим образом. Коды измеренных пеленгов  а также соответствующие им моменты времени tj с выхода устройства формирования пеленгов 1 поступают на первый вход вычислителя-формирователя 2. Блок 1 может быть выполнен, например, как показано в [6]. На второй вход вычислителя-формирователя 2 поступают коды декартовых координат пеленгатора xp, yp, zp от блока инерциальной системы навигации 8, который может быть выполнен, например, в соответствии с [7].
а также соответствующие им моменты времени tj с выхода устройства формирования пеленгов 1 поступают на первый вход вычислителя-формирователя 2. Блок 1 может быть выполнен, например, как показано в [6]. На второй вход вычислителя-формирователя 2 поступают коды декартовых координат пеленгатора xp, yp, zp от блока инерциальной системы навигации 8, который может быть выполнен, например, в соответствии с [7].
Вычисленные коэффициенты по сигналам управления с выхода 1 синхронизатора 9 записываются в БЗУ 3 (фиг. 3). В промежутках между тактами записи БЗУ 3 находится в режиме считывания и по тактам считывания информация из СОЗУ 31 ... 33K+7 записывается в регистры 3 с выходов 13(1)...3
с выходов 13(1)...3
Рассмотрим работу вычислителя-формирователя 2 (фиг. 2). На вход 11 поступает код, пропорциональный углу места β цели, на вход 12 поступает код, пропорциональный азимуту α цели. На входы 21 ... 23 поступают коды, пропорциональные декартовым координатам пеленгатора xpj, ypj, zpj соответственно. На вход 13 поступает код, пропорциональный текущему времени tj. На выходе преобразователя 10 имеет место код, пропорциональный tgβ, на выходе преобразователя 11 - код, пропорциональный secαj, на выходе преобразователя 12 - код, пропорциональный tgαj, на выходе преобразователей 131 ... 13K+1 - код, пропорциональный tj...t
Рассмотрим работу синхронизатора 9 (фиг. 6). Импульсы с выхода 2 устройства формирования пеленгов 1 (фиг. 1) поступают на счетный вход счетчика 27, который формирует код адреса, поступающий на второй вход мультиплексора 33. Импульсы со второго входа блока 1 также поступают на второй вход триггера 35, выходной сигнал которого устанавливает СОЗУ 31 ... 33K+7 в режим записи. На первый вход триггера 35 поступают импульсы со второго выхода блока 1 через элемент задержки 34, формируя на выходе сигналы считывания информации из СОЗУ 31 ...33K+7. Импульсы с выхода схемы ИЛИ 44 тактируют СОЗУ 31 . . . 33K+7. После подсчета S импульсов, поступающих от блока 1, на выходе счетчика 28 появляется импульс переполнения, который через счетчик 29 поступает на преобразователи кодов 311... 31S-1, при этом элемент 311 является умножителем на два, элемент 312 - умножителем на три, ... элемент 31S-1 - умножителем на S. После подсчета S импульсов от генератора тактовых импульсов 40, импульс переполнения с выхода счетчика 39 поступает через счетчик 41 на вторые входы сумматоров, увеличивая их содержимое на единицу. В зависимости от состояния выхода счетчика 39 к выходной шине мультиплексора 32 коммутируется один из S входов. В результате на выходе мультиплексора 32 последовательно формируются коды адресов максимально разнесенных во времени замеров, что обеспечивает достижение наилучших точностных характеристик определения местоположения объекта. Импульсы с выходов триггера 35 управляют работой мультиплексора 33, при этом импульс записи с выхода 2 триггера 35 подключает к выходу мультиплексора 33 сигнал с выхода счетчика 27. Дешифратор 42 управляет порядком считывания информации из регистров 31,1 ... 33K+7,S. Импульс с выхода счетчика 39 поступает на второй выход синхронизатора 9 и запускает БРСЛАУ 4. Компаратор 36, регистр 37 и первая схема И 38 необходимы для синхронной работы схемы. Выход второго мультиплексора 33, первый и второй выходы триггера 35, выход схемы ИЛИ 44, выход дешифратора 42 образуют первый выход синхронизатора 9, который соединен со вторым входом БЗУ 3. При этом порядок подключения следующий: выход 11 соединен с адресными входами СОЗУ 31 ... 33K+7, выходы 12 ... 13 соединены со входами установки режима записи и считывания СОЗУ 31 ... 33K+7, выход 14 соединен с синхропроводом СОЗУ БЗУ 3, выходы 11, 12, 13, 14 блока 9 объединены в управляющий вход БЗУ 3 (см. фиг. 3). Выход 15 соединен с управляющими входами 22 БЗУ 3. Все блоки и элементы заявляемого устройства могут быть реализованы на базе типовых узлов вычислительной техники [9].
Источники информации
1. Патент США N 3329955, кл. 343-113, 1967.
2. Авторское свидетельство СССР N 1521072, G 01 S 11/00, 3/02, 1987.
3. Патент Российской Федерации N 2012902, 5 G 01 S 13/46, 1974.
4. Булычев Ю.Г., Бурлай И.В., Моторкин В.А. Оценивание параметров движения объектов на базе высокоточных угломерных систем. Радиотехника и электроника, 1992, т-37, N 4, с. 618 - 627.
5. Булычев Ю.Г., Коротун А.А., Манин А.П., Моторкин В.А. Радиоэлектроника, 1991, N 4, с. 51 - 56.
6. Авторское свидетельство СССР N 1097072, G 01 S /3152, 1982.
7. Громов Г.Н. Дифференциально-геометрический метод навигации. М.: Радио и связь, 1986.
8. Авторское свидетельство СССР N 1508235, G 06 F, 15/36, 1987.
9. Якубовский С.В. и др. Цифровые и аналоговые интегральные микросхемы. М.: Наука, 1989.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДВИЖНЫЙ ПЕЛЕНГАТОР | 2005 |
|
RU2298804C2 |
| ПАССИВНАЯ ПЕЛЕНГАЦИОННАЯ СИСТЕМА | 2005 |
|
RU2298803C2 |
| СИСТЕМА ПАССИВНОЙ ЛОКАЦИИ ДВИЖУЩЕГОСЯ ОБЪЕКТА | 1991 |
|
RU2050557C1 |
| ПОДВИЖНЫЙ ПЕЛЕНГАТОР | 1992 |
|
RU2012902C1 |
| УСТРОЙСТВО ОТОЖДЕСТВЛЕНИЯ НАБОРОВ ДАННЫХ | 2010 |
|
RU2427884C1 |
| Подсистема определения дальности доплеровского радиопеленгатора | 1990 |
|
SU1797083A1 |
| Устройство отождествления наборов данных | 1989 |
|
SU1654810A1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2005 |
|
RU2283505C1 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И МНОГОКАНАЛЬНЫЙ ПЕЛЕНГАТОР | 2002 |
|
RU2258241C2 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2536609C1 |

Изобретение относится к радиолокации и может быть использовано в радионавигации, метеорологии, геодезий. Заявляемое устройство позволяет определить параметры криволинейных траекторий по угломерным данным подвижного пеленгатора, что является достигаемым техническим результатом. Задача определения параметров криволинейных траекторий движения объектов решается путем введения в устройство, содержащее устройство формирования пеленгов, буферное запоминающее устройство, блок решения системы линейных алгебраических уравнений, устройство отображения, блок инерциальной системы навигации, синхронизатор, следующих блоков: вычислитель-формирователь, блок оценивания, блок вычисления декартовых координат цели, а также организацией взаимодействия между ними. 6 ил.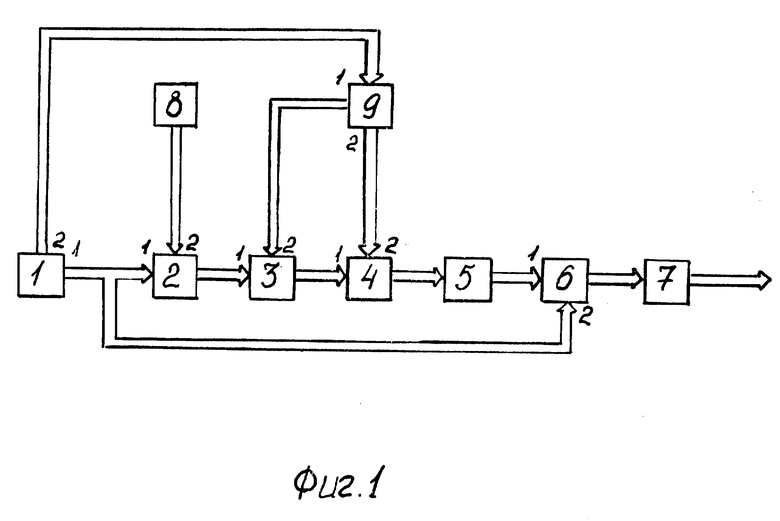
Подвижный пеленгатор, содержащий устройство формирования пеленгов, буферное запоминающее устройство, блок решения систем линейных алгебраических уравнений, устройство отображения, блок инерциальной системы навигации, синхронизатор, отличающийся тем, что введены вычислитель-формирователь, блок оценивания, блок вычисления декартовых координат цели, при этом первый выход устройства формирования пеленгов соединен с первым входом вычислителя-формирователя, выход которого соединен с первым входом буферного запоминающего устройства, выход которого соединен с первым входом блока решения систем линейных алгебраических уравнений, выход которого через блок оценивания соединен с первым входом блока вычисления декартовых координат цели, выход которого через устройство отображения соединен с выходом устройства, выход блока инерциальной системы навигации соединен с вторым входом вычислителя-формирователя, первый и второй выходы синхронизатора соединены соответственно с вторыми входами буферного запоминающего устройства и блока решения систем линейных алгебраических уравнений, первый выход устройства формирования пеленгов соединен с вторым входом блока вычисления декартовых координат цели, второй выход устройства формирования пеленгов соединен с входом синхронизатора, при этом первая шина первого входа вычислителя-формирователя соединена с входом первого преобразователя кодов, вторая шина первого входа соединена с входами второго и третьего преобразователей кодов, выходы первого и второго преобразователей кодов соединены соответственно с первым и вторым входами первого перемножителя, первая шина второго входа соединена с первыми входами второго и третьего перемножителей, вторая и третья шины второго входа соединены с первыми входами первого и второго сумматоров соответственно, третья шина первого входа вычислителя-формирователя соединена с входами четвертого, ..., (K + 4)-го (K - степень полинома, описывающего модель движения) преобразователей кодов, выходы четвертого, ..., (K + 4)-го преобразователей кодов соединены соответственно с первыми входами четвертого, ..., (2K + 5)-го перемножителей, выход первого перемножителя соединен с вторыми входами третьего, ..., (K + 4)-го перемножителей, выходы второго и третьего перемножителей соединены с вторыми входами первого и второго сумматоров соответственно, выход третьего преобразователя кодов соединен с вторыми входами второго, (K + 5)-го, ..., (2K + 5)-го перемножителей, выход вычислителя-формирователя образуют выходы первого, четвертого, ..., (2K + 5)-го перемножителей, выходы третьего, ..., (K + 4)-го преобразователей кодов, выходы первого и второго сумматоров, при этом первый, ..., (3K + 3)-й входы блока оценивания через медианные фильтры соединены соответственно с первым, ..., (3K + 3)-м выходами, первая, ..., 3K-я шины первого входа блока вычисления декартовых координат цели соединены с первыми входами первого, ..., K3-го перемножителей, выходы первого, ..., K-го перемножителей соединены соответственно с первым, ..., K-м входами первого сумматора, выходы (K + 1)-го, ..., 2K-го перемножителей соединены соответственно с первым, ..., K-м входами второго сумматора, выходы (2K + 1)-го, ..., 3K-го перемножителей соединены соответственно с первым, ..., K-м входами третьего сумматора, (3K + 1)-я, ..., (3K + 3)-я шины первого входа соединены соответственно с (K + 1)-ми входами первого, ..., третьего сумматоров, первый, ..., третий выходы которых образуют выход блока вычисления декартовых координат цели.
| ПОДВИЖНЫЙ ПЕЛЕНГАТОР | 1992 |
|
RU2012902C1 |
| US 5614912 A, 25.03.97 | |||
| Автоматический огнетушитель | 0 |
|
SU92A1 |
| DE 3537730 A1, 30.04.87. | |||
