Изобретение касается групп космических аппаратов, таких, например, как спутники, предназначенных для перемещения строем для обеспечения совместного выполнения задания, а точнее - контроля относительных положений этих космических аппаратов одних относительно других.
Как известно специалистам, некоторые группы космических аппаратов, как, например, спутники, должны быть позиционированы относительно друг друга с определенной точностью для обеспечения совместного выполнения задания. Это позиционирование должно осуществляться в начале выполнения задания, например в процессе размещения спутников на орбите. Но можно также это обеспечить в процессе выполнения задания либо для осуществления частичной или полной реконфигурации группы, либо исправления технической неисправности (или отказа оборудования), по меньшей мере, одного из космических аппаратов.
Для обеспечения такого позиционирования было предложено снабдить каждый космический аппарат (либо, по меньшей мере, те из них, которые являются наиболее важными в рамках задания) устройством контроля, содержащим, по меньшей мере, с одной стороны, приемоизлучающие антенны, при необходимости, дополненные приемными антеннами, установленные на разнонаправленных сторонах космического аппарата и предназначенные для излучения/приема радиочастотных сигналов (RF), во-вторых, радиочастотный датчик, содержащий, в частности, первые средства измерения, предназначенные для оценки разности хода полученных сигналов между антеннами, и, с третьей стороны, средства обработки, предназначенные для оценки направлений сигналов, которые излучаются другими космическими аппаратами группы (обычно называемыми «осями визирования»), на основании мощностей принятых сигналов.
Такое устройство контроля может также содержать вторые средства измерения, предназначенные для оценки расстояния, отделяющего их космический аппарат от одного из других космических аппаратов группы, на основании сигналов, принимаемых антеннами, и дополнительных сигналов, передаваемых другими космическими аппаратами группы и характеризующих расстояния, которые их отделяют соответственно от их космического аппарата. В этом случае средства обработки могут определять относительные положения космических аппаратов группы относительно выбранной системы отсчета на основании оцененных расстояний и осей визирования.
Наконец, если устройство контроля содержит средства анализа, то можно определить риски столкновения между космическими аппаратами на основании определенныx относительных положений и даже предложить маневры уклонения своему космическому аппарату в зависимости от этих относительных расположений, а также, в случае необходимости, реконфигурировать весь строй после устранения всех неисправностей и рисков столкновения.
Когда антенны установлены в правильно выбранные места (например, ограничивающие множественные траектории) и когда первые средства измерения осуществляют надежный метод устранения неоднозначности в измерениях разности хода, возможно получить разности хода порядка нескольких миллиметров, и, таким образом, направления передачи будут иметь точность порядка градуса.
Для того, чтобы устройство контроля могло работать во всех направлениях и, таким образом, определять любые относительные положения, необходимо, чтобы каждый космический аппарат был снабжен на нескольких поверхностях тройными антеннами (одна приемоизлучающая и две приемные). Однако, с одной стороны, установка антенн на космических аппаратах является трудной задачей, с другой стороны, увеличенное количество антенн усложняет устройство контроля, и, с третьей стороны, устранение неоднозначности в разностях хода является сложным процессом, который трудно сравним с надежностью и временем реакции, необходимыми в области обнаружения столкновения.
Конечно, возможно использование других методов оценки любых относительных положений космических аппаратов, такого, например, как лазерный локатор (LIDAR) или радиолокатор (RADAR), но эти методы являются либо дорогостоящими и сложными, либо трудными для установки на космические аппараты, в особенности когда речь идет о спутниках.
Можно также использовать метод оценки любых относительных положений на базе GPS (“Global Positioning System” - глобальная спутниковая система местоопределения). Но это решение не всегда является приемлемым при выполнении задач при полете строем либо потому, что высота выполнения задачи гораздо больше высоты созвездия спутников GPS, либо потому, что требуется дополнительное или независимое средство позиционирования.
Ни одно из известных решений не дает полного удовлетворения, поэтому изобретение имеет целью улучшить ситуацию.
Для достижения этой цели в нем предлагается устройство контроля для космического аппарата группы аппаратов, предназначенных для перемещения в соответствии с выбранным строем, содержащее, с одной стороны, блок, по меньшей мере, из трех приемоизлучающих антенн, предназначенных для установки, по меньшей мере, на трех разнонаправленных сторонах космического аппарата и способных излучать/принимать радиочастотные сигналы, и, с другой стороны, средства обработки, предназначенные для оценки направлений передачи сигналов, излучаемых другими космическими аппаратами группы, на основе сигналов, принимаемых антеннами.
Это устройство контроля отличается тем, что:
оно содержит, с одной стороны, первые средства измерения, предназначенные для определения мощности сигналов, принимаемых каждой из антенн, и выдавать совокупности (измерений) мощностей, каждый из которых связан с одним из других космических аппаратов группы, и, с другой стороны, запоминающие средства, предназначенные для хранения совокупностей картографических данных, каждый из которых характеризует мощности сигналов, принимаемых каждой из антенн в зависимости от выбранных направлений передачи, и
что средства обработки предназначены для сравнения каждой совокупности мощностей (выдаваемых первыми средствами измерения) с совокупностями хранящихся картографических данных для оценки каждого направления передачи сигналов, излучаемых другими космическими аппаратами группы по отношению к системе координат, привязанной к космическому аппарату.
Устройство в соответствии с изобретением может содержать другие отличительные признаки, которые могут быть взяты по отдельности или в сочетании, и в частности:
его первые средства измерения могут предназначаться для осуществления измерения соотношения сигнал/шум (S/B) для каждого из принимаемых сигналов для определения их мощности;
оно может содержать средства контроля, предназначенные, в случае предоставления временного интервала излучения и временного интервала приема (взаимодополняющих) каждому космическому аппарату группы в соответствии с выбранной схемой, для разрезания временных интервалов излучения и приема, предоставленных их космическому аппарату, на число подынтервалов излучения и подынтервалов приема, каждый из которых равен числу приемоизлучающих антенн их космического аппарата, и предоставить подынтервал излучения каждой из приемоизлучающих антенн в соответствии с первым выбранным предписанием и подынтервал приема каждой из приемоизлучающих антенн в соответствии со вторым выбранным предписанием. Таким образом, каждой приемоизлучающей антенне разрешается излучать в течение предоставленного ей подынтервала излучения и принимать в течение предоставленного ей подынтервала приема. Впрочем, каждая совокупность мощностей (выдаваемая первыми средствами измерения) передается сигналами, принимаемыми приемоизлучающими антеннами в течение их соответствующих подынтервалов приема;
средства контроля могут предназначаться для принудительного изменения первого выбранного предписания и/или второго выбранного предписания;
оно может содержать вторые средства измерения, предназначенные для оценки каждого расстояния, отделяющего их космический аппарат от одного из других космических аппаратов группы, на основании, по меньшей мере, сигналов, принимаемых каждой из антенн. В этом случае средства обработки могут быть предназначены для определения относительных положений космических аппаратов группы относительно выбранной системы координат на основании оцененных расстояний и оцененных направлений передачи сигналов;
его вторые средства измерения могут быть предназначены для оценки каждого расстояния, отделяющего их космический аппарат от одного из других космических аппаратов группы на основании сигналов, принятых каждой из антенн, и дополнительных сигналов, передаваемых другими космическими аппаратами группы и характеризующих соответствующие измерения расстояния, которые они осуществляют со своей стороны;
запоминающие средства могут сохранять совокупности картографических данных, характеризующих мощности, нормализованные относительно опорного уровня. В этом случае средства обработки предназначены для анализа (измерений) мощностей каждой совокупности мощностей, выдаваемой первыми средствами измерения для определения, например, максимальной мощности внутри каждой из них (которая становится, таким образом, опорной мощностью (или уровнем) измерения), и применить к принятым сигналам (из того же космического аппарата) в течение выбранного времени усиление, которое выбрано для нормализации мощностей принимаемых сигналов относительно этой опорной мощности (или этого уровня);
оно может содержать средства анализа, предназначенные для определения рисков столкновений на основании относительных положений космических аппаратов группы;
средства анализа, в случае определения риска столкновения, могут предназначаться для определения маневра уклонения для их космического аппарата в зависимости от относительных положений космических аппаратов группы;
оно может содержать средства контроля для осуществления контроля возврата к номинальной геометрии строя исходя из геометрических и кинематических условий, полученных после маневра уклонения от столкновения и после возврата к условиям, безопасным для всех спутников;
приемоизлучающие антенны могут быть предназначены для излучения/приема радиочастотных сигналов, представленных в виде несущей частоты, модулированной выбранными псевдослучайными кодами;
приемоизлучающие антенны могут быть предназначены для излучения/приема несущих частот, представляющих собой частоту, принадлежащую диапазону частот, выбранному среди диапазонов S, SHF и EHF.
В изобретении предлагается также космический аппарат, предназначенный для перемещения в группе космических аппаратов того же типа, содержащий устройство контроля представленного выше типа.
Изобретение особенно хорошо подходит, хотя и не только для космических аппаратов таких, как спутники или летательные аппараты.
В дальнейшем изобретение поясняется нижеследующим описанием, не являющимся ограничительным, со ссылками на сопровождающие чертежи, на которых:
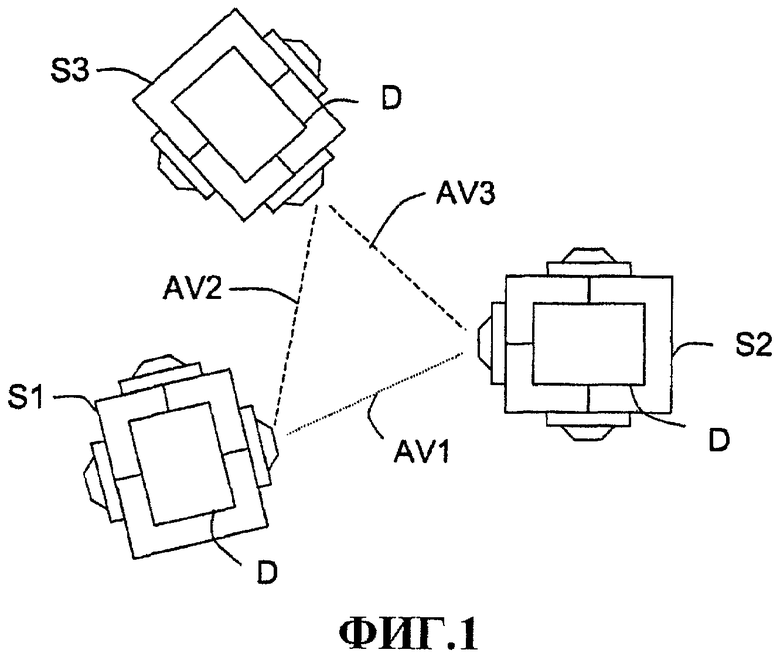
- фиг.1 изображает весьма схематично группу из трех спутников, каждый из которых содержит устройство контроля по изобретению,
- фиг.2 изображает весьма схематично и функционально пример осуществления устройства контроля по изобретению,
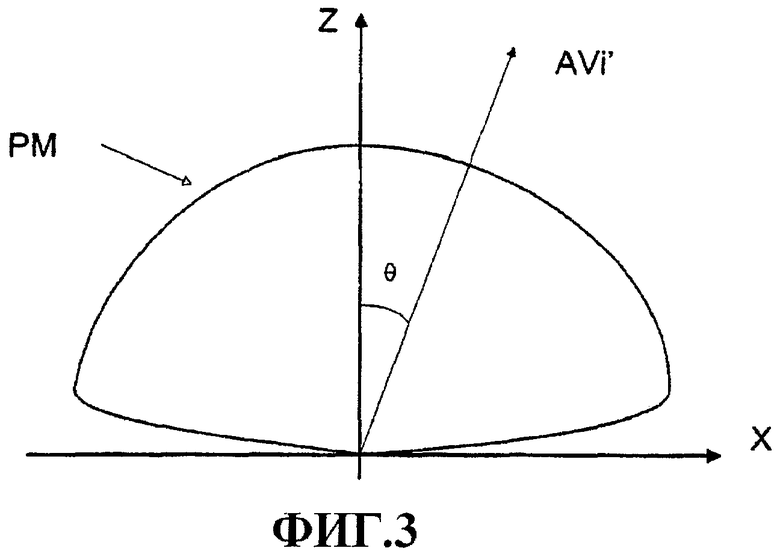
- фиг.3 схематично представляет в полярных координатах пример диаграммы мощности, принятой (РМ) всенаправленной антенной с полусферической диаграммой в зависимости от угла наклона относительно ее нормали (Z),
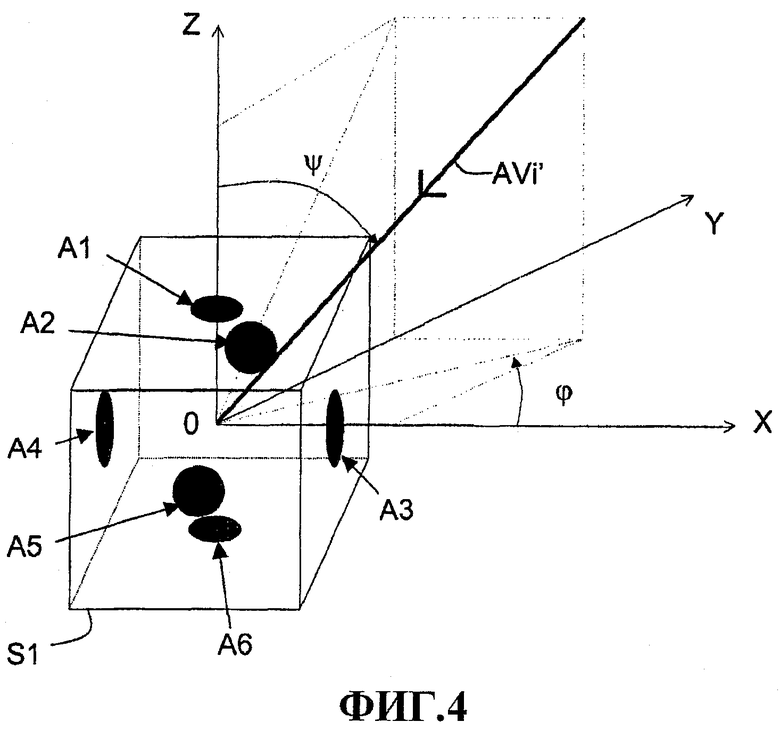
- фиг.4 изображает весьма схематично пример позиционирования шести антенн блока антенн на сторонах спутника, а также основные параметры, участвующие в определении координат оси визирования,
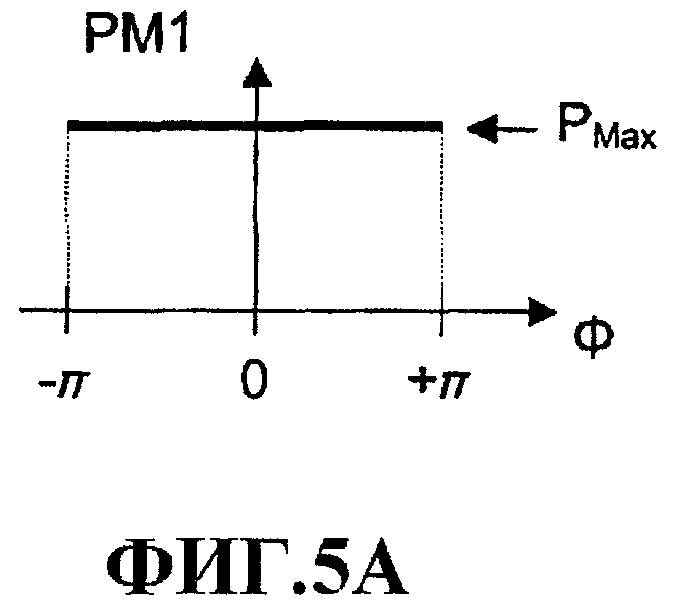
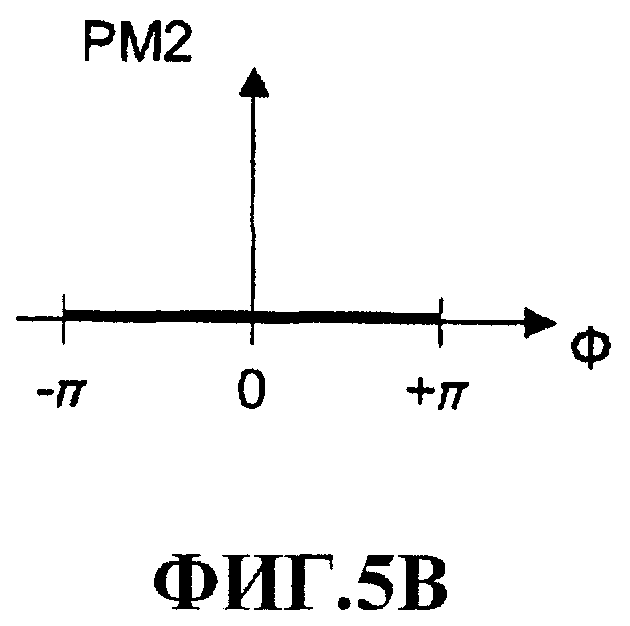
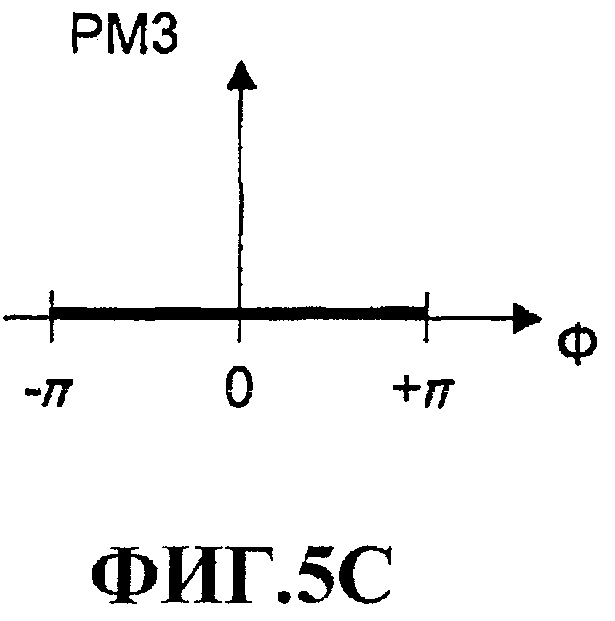
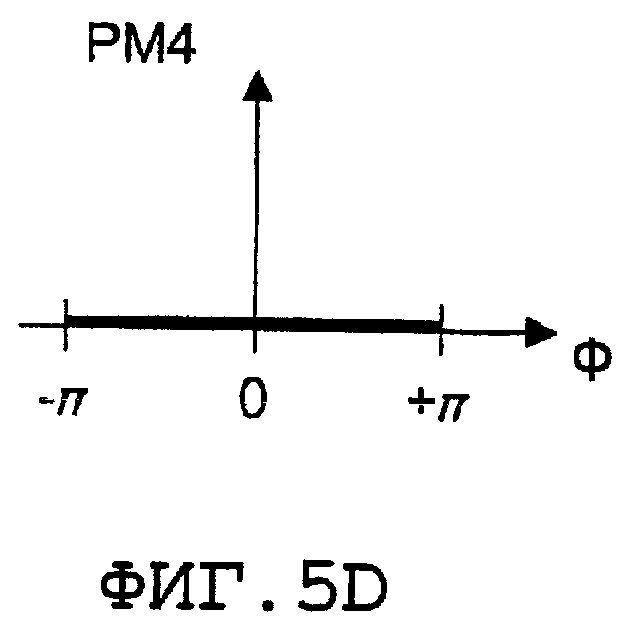
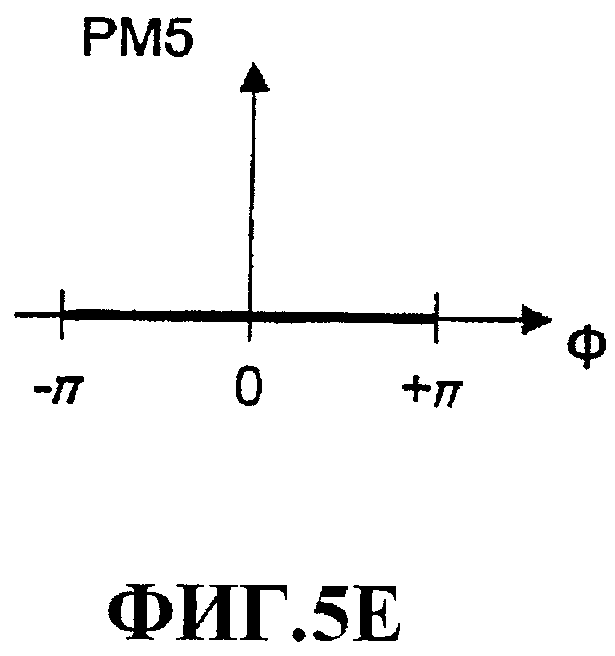
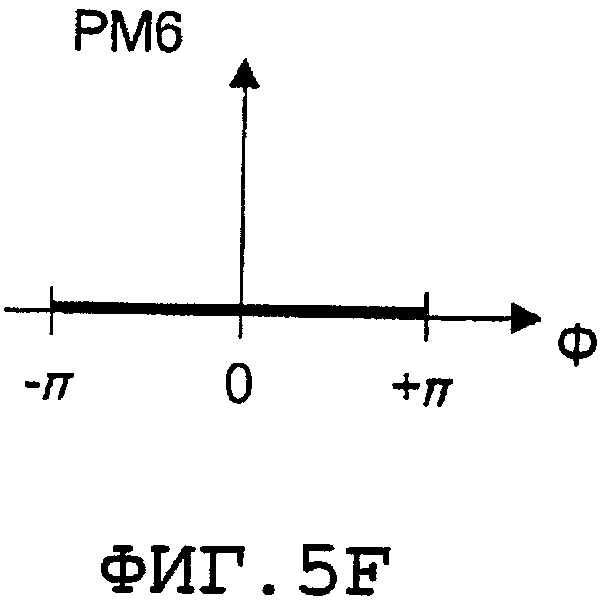
- фиг.5А-5F представляют примеры диаграмм мощности, принятой соответственно шестью антеннами блока по фиг.4 в зависимости от угла φ, когда угол ψ равен 0 (относительно оси Х),
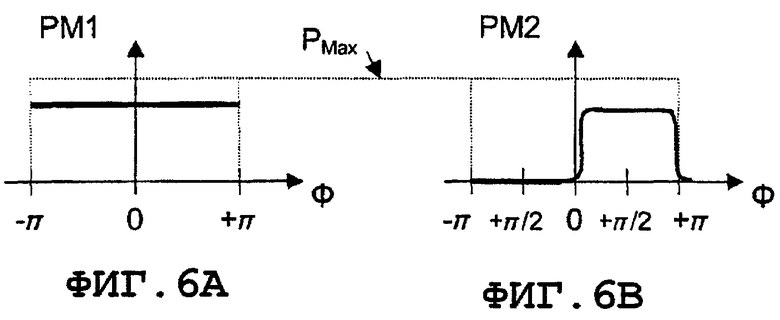
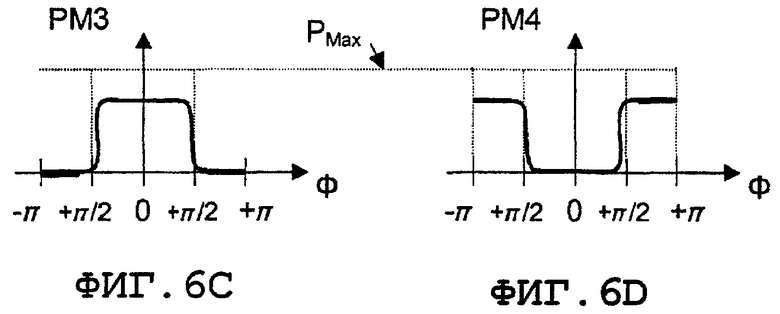
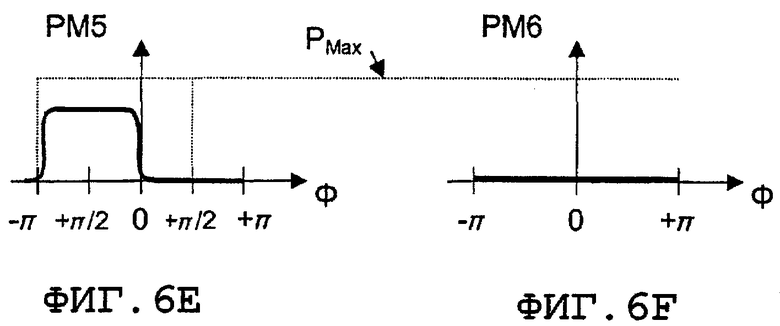
- фиг.6А-6F изображают примеры диаграмм мощности, полученных соответственно шестью антеннами комплекса по фиг.4 в зависимости от угла φ, когда угол ψ равен π/4 (относительно оси Х),
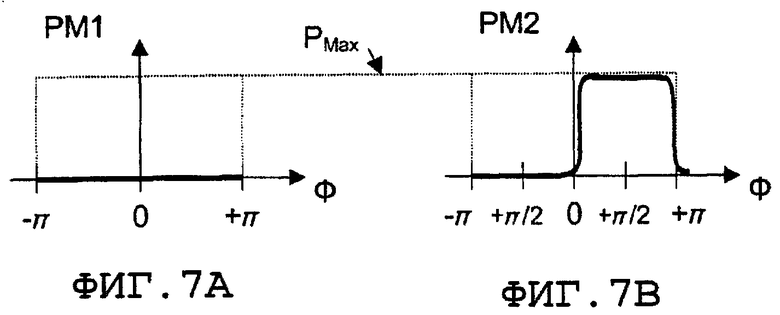
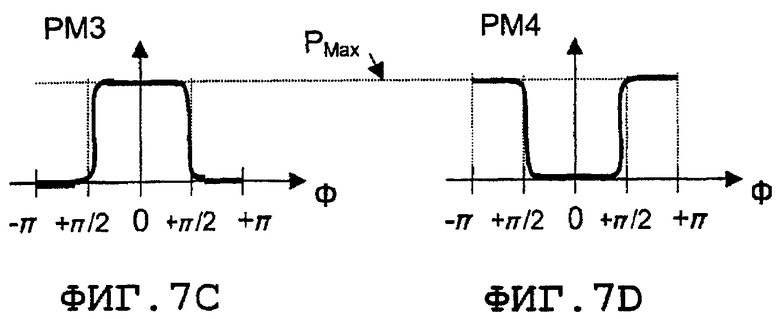
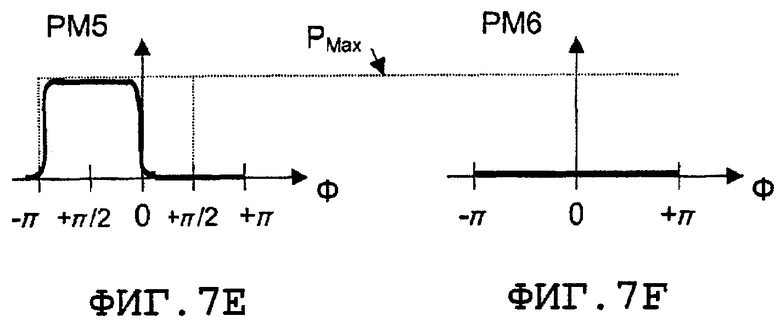
- фиг.7А-7F изображают примеры диаграмм мощности, принятой соответственно шестью антеннами блока по фиг.4 в зависимости от угла φ, когда угол ψ равен π/2 (относительно оси Х),
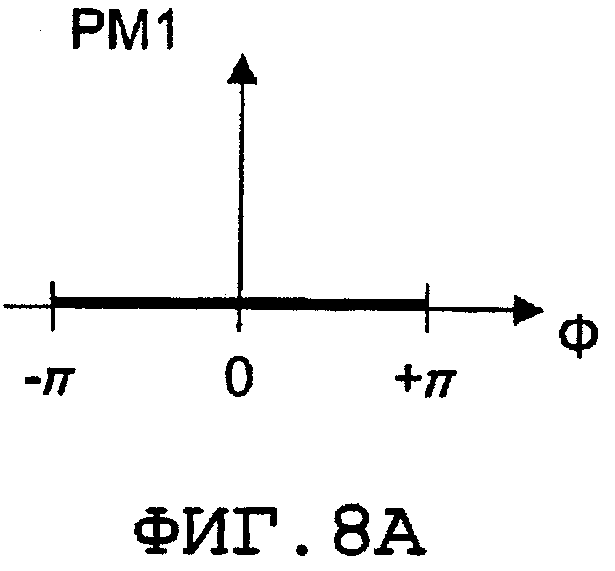
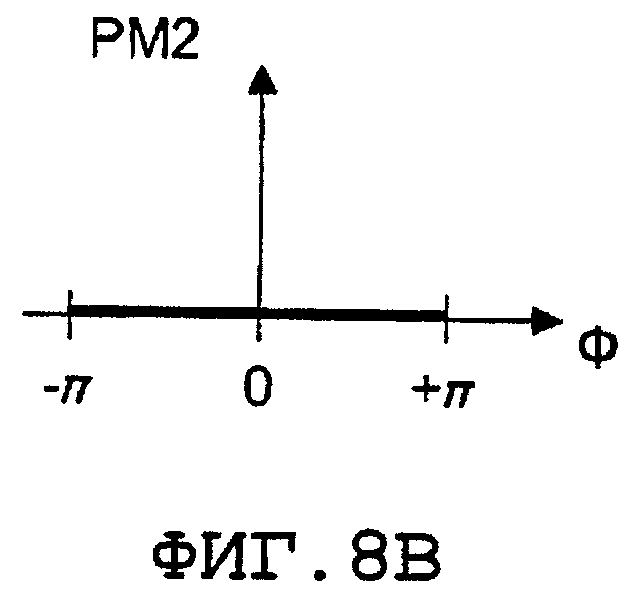
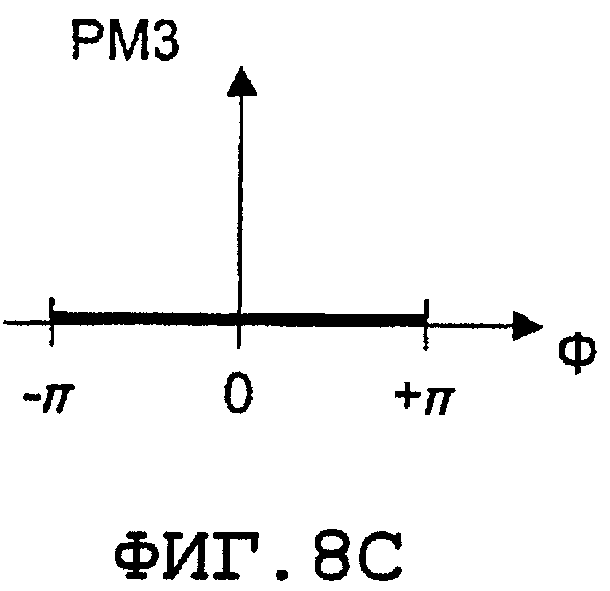
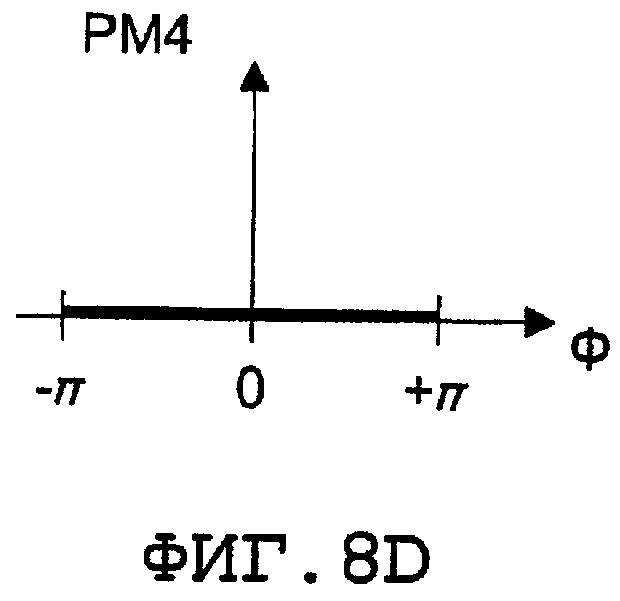
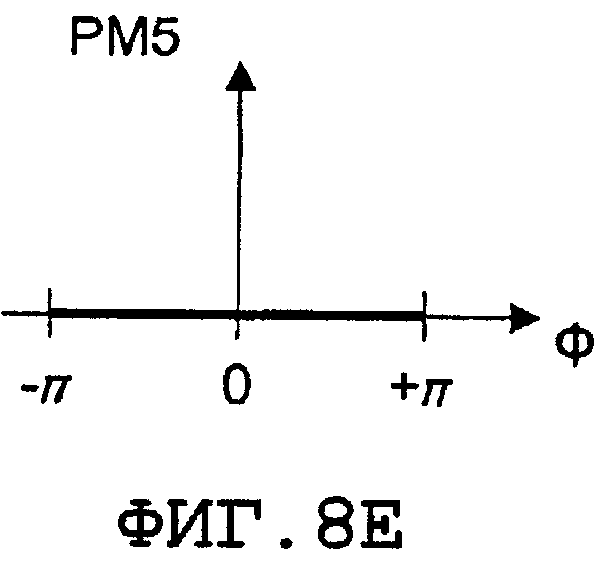
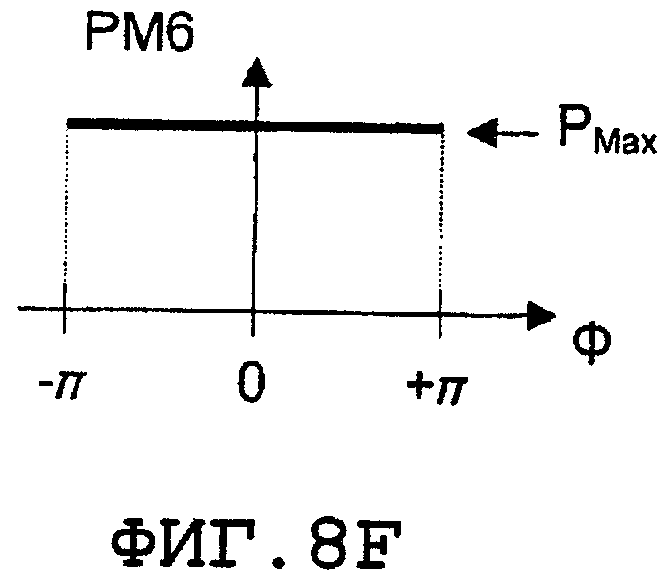
- фиг.8А-8F представляют примеры диаграмм мощности, принятой соответственно шестью антеннами блока по фиг.4 в зависимости от угла φ, когда угол ψ равен π (относительно оси Х).
Приложенные чертежи могут не только служить для иллюстрации изобретения, но и, в необходимом случае, служить для его дополнения.
Целью изобретения является определение с помощью устройства контроля, установленного в космическом аппарате группы космических аппаратов, перемещающихся строем, осей визирования, а также, в случае необходимости, определение относительных положений космических аппаратов даже с определением рисков столкновения с учетом маневров уклонения, а также, в случае необходимости, номинальной реконфигурации.
Ниже рассматривают в качестве неограничивающего примера, что космическими аппаратами группы являются летающие (или предназначенные для полета) строем наблюдательные спутники для выполнения задачи космического или наземного наблюдения.
Но изобретение не ограничивается таким типом космического аппарата. Оно касается, в действительности, всех космических аппаратов, предназначенных для полета строем по заданной конфигурации (изменяемой в необходимом случае).
Обратимся сначала к фиг.1 и 2, чтобы представить группу космических аппаратов (спутников), в которых может быть использовано изобретение.
На фиг.1 изображена группа из трех спутников Si (i=1 до 3), летящих строем. Важно отметить, что изобретение не ограничивается группой, содержащей три космических аппарата. Оно касается, в действительности, любой группы, как только в нее входят, по меньшей мере, два космических аппарата.
Внутри такой группы, по меньшей мере, один из спутников Si (S1-S3) содержит устройство D контроля согласно изобретению. Но предпочтительно, чтобы каждый спутник группы (или строя) располагал своим собственным устройством D.
Устройство D контроля согласно изобретению содержит, по меньшей мере, один комплекс, образованный, по меньшей мере, тремя приемоизлучающими антеннами Aj, установленными в выбранных местах на, по меньшей мере, трех разнонаправленных сторонах спутника Si, на котором оно установлено. В примере, изображенном на фиг.1 и 2, каждое устройство D содержит только три антенны Aj (j=1 до 3). Но комплекс может содержать более трех антенн. Такой случай изображен на фиг.4, который изображает блок из шести антенн(j=1 до 6), встроенных на шести сторонах спутника S1. Например, каждая антенна Аj комплекса встроена, по существу, в центре стороны спутника Si. Но это не является обязательным.
Каждая антенна Aj способна излучать и принимать радиочастотные сигналы (RF), имеющие выбранную частоту f1.
Эти радиочастотные сигналы представлены предпочтительно в виде несущих частот, модулированных выбранными псевдослучайными кодами.
Частота f1 принадлежит, предпочтительно, диапазону S. Она может также принадлежать диапазону SHF или EHF.
Ниже считают, что частота f1 принадлежит диапазону S. Например, f1=2,1 ГГц.
Устройство D контроля может, при необходимости, содержать, по меньшей мере, одну дополнительную антенну, установленную, по меньшей мере, на одной из сторон своего спутника Si и предназначенную только для приема радиочастотных сигналов, имеющих частоту f1. Можно, например, представить, что одна (или несколько) сторона спутника Si будет оборудована одной приемоизлучающей антенной Aj и одной или двумя дополнительными приемными антеннами.
В соответствии с изобретением каждое устройство D контроля содержит также, по меньшей мере, измерительный модуль ММ, запоминающие средства BD и модуль МТ обработки.
Первый измерительный модуль ММ содержит, по меньшей мере, один первый измерительный субмодуль М1, предназначенный для определения мощности сигналов, которые принимаются каждой из антенн Aj (и возможными дополнительными антеннами), для выдачи совокупности данных, характерных для этих измерений мощности, при этом каждая совокупность связана с одним из других спутников Si' группы, к которой принадлежит его собственный спутник Si.
Например, первый измерительный модуль ММ может определить мощность каждого сигнала, принимаемого антенной Aj, осуществляя измерение его отношения сигнал/шум (S/B), что позволяет избавиться от точного значения величины коэффициента усиления/ослабления, который дает цепь обработки, зная, что уровень шума относительно хорошо известен.
Измерение соотношения сигнал/шум (S/B) может быть выполнено с помощью известной специалисту техники. Например, можно измерить энергию в диапазоне частот, который содержит сигнал, а также энергию в диапазоне соседних частот, который не содержит сигнала.
Если задание предполагает большой динамический диапазон мощности, принимаемой от различных космических аппаратов (в зависимости от того, близко или удаленно расположены космические аппараты), в частности, в том, что касается измерений мощности, устройство D контроля может содержать модуль контроля усиления MCG, размещенный на входе измерительного модуля ММ и соединенный с последним. Этот модуль контроля усиления MCG представляет собой, точнее, петлю контроля автоматического усиления, способную ослаблять/усиливать сигнал для приведения его к уровню, сравнимому с уровнем, обработанным каскадом аналого-цифрового преобразования. От одного временного интервала к другому, соответствующему приему на новую антенну или приему от другого спутника, уровень принимаемой мощности может значительно изменяться и вызывает изменение усиления, вносимого модулем контроля усиления MCG. Это значение усиления должно быть определено измерительным модулем ММ для учета при вычислении мощности, принимаемой на входе модуля МСG. Модуль MCG выдает, таким образом, модулю ММ значение усиления, которое он использовал для каждого интервала времени.
В этом случае первый измерительный субмодуль М1 предпочтительно определяет мощность каждого сигнала, принимаемого антенной Aj в зависимости от измерения мощности, осуществленного на оцифрованном сигнале, и усиления, которое было к нему применено в модуле предварительной аналоговой обработки.
Как схематично показано на фиг.2, модуль контроля усиления является, например, частью модуля МР аналого-цифровой предварительной обработки, предназначенного для обработки принятых сигналов (в частности, через контроль усиления) и преобразования их в цифровые сигналы для питания первого измерительного модуля ММ.
Этот модуль МР предварительной аналого-цифровой обработки соединен, например, с антеннами Aj комплекса (так же, как и возможные дополнительные антенны) посредством первого С1 и второго С2 переключающих модулей.
Первый переключающий модуль С1 обеспечивает соединение с той или другой из антенн в зависимости от инструкций модуля МС контроля, к которому вернемся позднее.
Второй переключающий модуль С2 соединен со входом/выходом первого переключающего модуля С1 и, с одной стороны, со входом модуля МР предварительной аналого-цифровой обработки, и, с другой стороны, с выходом модуля MF формирования радиочастотных сигналов (для части передачи на другие спутники Si' радиочастотных сигналов). Он, следовательно, обеспечивает функционирование устройства D контроля либо в режиме приема сигналов, либо в режиме излучения сигналов в зависимости от инструкций, поступающих из модуля МТ обработки.
Устройство D контроля содержит синхронизатор Н, позволяющий выдавать синхронизируемые сигналы, необходимые для функционирования, по меньшей мере, некоторых из его составных частей, и, в частности, необходимых для контроля передачи и приема.
Запоминающие средства BD предназначены для хранения совокупности картографических данных, каждая из которых характеризует заранее заданные и нормализованные мощности сигналов, принимаемых каждой из антенн Aj (и в необходимых случаях дополнительной(ыми) антенной(ами)) в зависимости от выбранных направлений передачи. Нормализация позволяет интересоваться только соотношениями измеренных мощностей, которые являются единственно характерными для оси визирования независимо от расстояния между спутниками. Как далее будет видно, важно осуществить идентичную нормализацию в модуле МТ обработки, для того чтобы иметь возможность сравнить табличные величины в запоминающих средствах BD с совокупностью измерений, осуществленных антенной контролируемого космического аппарата.
Мощности картографических данных заранее заданы при предварительном картографическом анализе, например внутри камеры для радиочастотных испытаний безэхового типа, либо c помощью моделирующего программного обеспечения по модели, представляющей соответствующие местоположения различных антенн, их внешних факторов, их характеристик, в частности их излучения.
На фиг.3 схематично представлен в полярных координатах пример диаграммы мощности, принятой РМ всенаправленной антенной в зависимости от угла наклона относительно ее нормали Z.
Кроме того, на фиг.5-8 схематично представлены четыре примера совокупностей из шести диаграмм мощностей, принятых PMj (j=1 до 6) соответственно шестью антеннами Aj комплекса антенн, встроенных, например, в спутник Si, изображенный на фиг.4 соответственно для четырех различных значений угла ψ, представляющего угол возвышения.
Точнее говоря, фиг.5А-5F изображают шесть диаграмм мощности (РМ1-РМ6), принятой соответственно шестью антеннами А1-А6 в зависимости от угла φ, представляющего азимут, и для угла ψ, равного 0 относительно оси Х системы координат (X,Y,Z). Фиг.6А-6F изображают шесть диаграмм мощности (РМ1-РМ6), принятой соответственно шестью антеннами А1-А6 в зависимости от угла φ, для угла ψ, равного π/4 относительно оси Х системы координат (X,Y,Z). Фиг.7A-7F изображают шесть диаграмм мощности (РМ1-РМ6), принятой соответственно шестью антеннами А1-А6 в зависимости от угла φ, для угла ψ, равного π/2 относительно оси Х системы координат (X,Y,Z). Фиг.8A-8F изображают шесть диаграмм мощности (РМ1-РМ6), принятой соответственно шестью антеннами А1-А6 в зависимости от угла φ, для угла ψ, равного π относительно оси Х системы координат (X,Y,Z).
На фиг.5-8 совокупности из шести диаграмм нормализованы относительно выбранного опорного уровня P , представляющего максимальную величину мощности PMj, принятой (шестью) антеннами Aj одного комплекса независимо от значений углов φ и ψ. Другая возможная нормализация состоит, например, в определении нормы 2 вектора мощностей, измеренных на каждой антенне, и в разделении измерений необработанных мощностей (то есть принятой, но не обработанной) величиной этой нормы 2 вектора измеренных мощностей. В этом случае вектор принятых мощностей, измеренных на каждой антенне, нормализованный затем модулем обработки МТ, и векторы принятых мощностей, табулированные в запоминающих средствах BD в зависимости от оси визирования, все имеют норму 2, равную 1.
, представляющего максимальную величину мощности PMj, принятой (шестью) антеннами Aj одного комплекса независимо от значений углов φ и ψ. Другая возможная нормализация состоит, например, в определении нормы 2 вектора мощностей, измеренных на каждой антенне, и в разделении измерений необработанных мощностей (то есть принятой, но не обработанной) величиной этой нормы 2 вектора измеренных мощностей. В этом случае вектор принятых мощностей, измеренных на каждой антенне, нормализованный затем модулем обработки МТ, и векторы принятых мощностей, табулированные в запоминающих средствах BD в зависимости от оси визирования, все имеют норму 2, равную 1.
Каждая совокупность картографических данных, хранящаяся в запоминающих средствах BD, образована на основе совокупности (предварительно определенных) диаграмм мощности типа тех, что показаны на фиг.5-8. При наличии нормализованных мощностей каждая совокупность картографических данных характеризует мощности, нормализованные, например, относительно опорного уровня Р , или относительно нормы 2 вектора мощностей (как показано выше).
, или относительно нормы 2 вектора мощностей (как показано выше).
Может быть использован любой тип запоминающего средства BD, в частности память или база данных.
Впрочем, в неограничивающем примере, изображенном на фиг.2, запоминающие средства BD встроены в модуль МТ обработки. Но это не является обязательным.
Модуль МТ обработки предназначен для сравнения каждой совокупности измерений мощности, вызываемой первым измерительным субмодулем М1, с совокупностями картографических данных, хранящихся в запоминающих средствах BD. Это сравнение предназначено для оценки каждого направления передачи (или оси визирования) AVi' сигналов, принимаемых антеннами Aj и приходящих от других спутников Si' группы по отношению к системе координат (X,Y,Z), привязанной к спутнику Si типа, изображенного на фиг.4. Эта система координат, например, привязана к центру О тяжести спутника Si, но это не является обязательным.
Действительно, всякий раз, когда модуль МТ обработки принимает совокупность измерений мощности от первого измерительного субмодуля М1, он начинает нормализовать измеренные мощности принятой совокупности с использованием техники, идентичной используемой при вычислении и хранении картографических данных.
Точнее говоря, модуль МТ обработки анализирует измерения мощности каждой совокупности мощностей, выдаваемой первым измерительным субмодулем М1, для определения, например, максимальной мощности внутри этой совокупности. Эта максимальная мощность затем рассматривается в качестве опорной мощности (или уровня) измерения. Затем модуль МТ обработки применяет к принятым сигналам (приходящим от того же космического аппарата) в течение заданного времени усиление, которое выбрано для нормализации мощностей принятых сигналов относительно опорного уровня.
Затем модуль МТ обработки выискивает среди совокупностей хранящихся картографических данных ту или те, которые наилучшим образом соответствуют принятой совокупности. Затем он или вставляет в совокупность картографических данных совокупности нормализованных принятых измеренных мощностей, или идентифицирует вектор полученных мощностей, сгруппированных в картографические данные, наиболее близкий к совокупности нормализованных измерений принятых мощностей, для осуществления оценки координат оси визирования AVi'. Таким образом, модуль МТ обработки определяет для каждого спутника Si визирования ось AVi', соответствующую каждому отдаленному спутнику Si'.
Для обеспечения дифференциации сигналов, излучаемых различными отдаленными спутниками Si', могут быть предложены два решения.
Первое решение заключается в предоставлении каждому спутнику Si группы собственной частоты излучения и оснащении его многочастотными антеннами Aj. В этом случае, который соответствует частотному мультиплексированию, каждый первый измерительный субмодуль М1 образует каждую совокупность измерений мощности, группируя сигналы, поступающие от антенн Aj комплекса и имеющие одну и ту же частоту (связанную с отдаленным спутником Si').
Второе решение заключается в предоставлении каждому космическому аппарату Si своего собственного псевдослучайного кода. В этом случае, который соответствует мультиплексированию с помощью кода, каждый первый измерительный субмодуль М1 образует каждую совокупность измерений мощностей путем группировки сигналов, исходящих из антенн Aj комплекса и имеющих один и тот же код (связанный с отдаленным спутником Si').
Третье решение заключается в применении временного мультиплексирования внутри группы спутников Si. Точнее говоря, каждому спутнику Si предоставляется временной интервал, в течение которого только он может передавать свои радиочастотные сигналы в направлении других спутников, в соответствии с выбранной схемой. Например, при наличии трех спутников S1-S3 первый временной интервал ТЕ1 предоставляют для передачи первому спутнику S1, второй временной интервал ТЕ2 излучения предоставляют второму спутнику S2, сразу после первого временного интервала ТЕ1, и третий временной интервал ТЕ3 излучения = третьему спутнику S3, следующий сразу после второго временного интервала ТЕ2 и перед первым временным интервалом ТЕ1 излучения следующего периода.
В течение временных интервалов ТЕi', во время которых спутник Si не излучает, он располагает временным интервалом TRi приема, равным сумме временных интервалов TEi' излучения других спутников Si'.
В этом примере осуществления (с временным мультиплексированием), предпочтительно, чтобы устройство D контроля содержало модуль MC контроля, предназначенный, прежде всего, для того, чтобы разделять временные интервалы излучения TEi и приема Tri, выделенные его спутнику Si, на число Nij подынтервалов TEij излучения и подынтервалов TRij приема, каждый из которых равен числу приемоизлучающих антенн Aj (и, возможно, дополнительной(ым)) его спутника Si.
Модуль MC контроля затем предоставляет, с одной стороны, подынтервал излучения TEij каждой приемоизлучающей антенне Aj своего устройства D контроля в зависимости от первого выбранного предписания, и, с другой стороны, подынтервал приема TRij каждой из приемоизлучающих антенн (и, в случае необходимости, дополнительной(ых) приемной(ых) антенны) в зависимости от второго выбранного предписания.
Таким образом, каждой приемоизлучающей антенне Aj разрешается, с одной стороны, излучать в течение предоставленного ей подынтервала TEij и, с другой стороны, принимать в течение предоставленного ей подынтервала TRij. Таким образом, каждая совокупность мощностей, выдаваемая первым измерительным субмодулем М1, касается сигналов, принятых различными антеннами Aj в течение их соответствующих приемных подынтервалов Trij приема.
Модуль MC контроля может определенным образом фиксировать первое и второе предписания субмодулей излучения TEij и приема TRij.
Это хорошо согласуется со схемой временного распределения излучения, согласно которой каждый космический аппарат Si излучает через все свои антенны одновременно.
Однако одновременное излучение через несколько антенн может исказить некоторые направления оси визирования, если антенны имеют диаграммы излучения, которые не являются полностью исключительными. Для того, чтобы этого избежать, возможно выбрать схему временного распределения на излучение, в которой каждый космический аппарат Si излучает последовательно через свои различные антенны.
В этом случае невозможно одновременно измерить мощность, принятую через различные антенны космического аппарата Si и излучаемую одной и той же антенной другого космического аппарата Si'. Действительно, если временной подынтервал, предоставленный второму космическому аппарату для излучения через свою антенну n°1, совпадает с временным подынтервалом, предоставленным первому космическому аппарату для приема на свою антенну n°1, он не может совпасть с подынтервалом, предоставленным первому космическому аппарату, на другую приемную антенну. Эта другая приемная антенна действительно имеет подынтервал, который совпадает с подынтервалом другой антенны второго космического аппарата. Предпочтительно изменять во времени предписание подынтервалов, предназначенных для различных приемных антенн космического аппарата, для того чтобы обеспечить последовательный сбор всех измерений мощности.
Можно предусмотреть изменение каждого предписания периодически, например каждые 5 или 10 секунд.
Когда модуль МТ обработки имеет координаты оси AVi' визирования, он может, при необходимости, определить расстояние, которое разделяет его спутник Si от спутника Si' по оси AVi' визирования.
Для этого устройство D контроля должно предпочтительно содержать в своем первом измерительном модуле ММ второй измерительный субмодуль М2. Точнее, последний предназначен для оценки каждого расстояния, отделяющего его спутник Si от другого спутника Si' той же группы на основании, по меньшей мере, радиочастотных сигналов, принимаемых каждой из антенн Aj и приходящих от этого другого спутника Si'.
Ввиду временных смещений, вызванных отсутствием высокоточной синхронизации между синхронизаторами Н спутников Si группы, каждый второй измерительный субмодуль М2 осуществляет предпочтительно свою оценку расстояния на основании не только радиочастотных сигналов, принимаемых каждой из антенн Aj и приходящих от другого спутника Si', но также по дополнительным сигналам, передаваемым этим другим спутником Si'.
Эти дополнительные сигналы предпочтительно состоят в модуляции несущей частоты сигнала с помощью выбранного псевдослучайного кода, а также, в случае необходимости, информационных данных, чтобы излучаемый сигнал являл собой картину локального времени передатчика космического аппарата Si', а также чтобы наблюдение за этим сигналом позволило приемнику космического аппарата Si получить измерение псевдорасстояния.
Сопоставляя свое собственное измерение псевдорасстояния с измерением, передаваемым космическим аппаратом (например, S2) в виде информационных данных в дополнительных сигналах, второй субмодуль М2 измерения другого космического аппарата (например, S1) может изолировать смещение синхронизации и знать расстояние между спутниками (S1, S2). Действительно, настоящее расстояние равно полусумме псевдорасстояния, измеренного космическим аппаратом S1 по первому сигналу, переданному космическим аппаратом S2, и псевдорасстояния, измеренного космическим аппаратом S2 по первому сигналу, переданному космическим аппаратом S1.
Второй измерительный субмодуль М2 спутника Si передает далее определенную величину расстояния между космическими аппаратами (Si, Si') на модуль МТ обработки.
Зная межспутниковое расстояние (Si, Si') и оценив соответствующую ось AVi' визирования, модуль МТ обработки, можно таким образом определить относительные положения двух соответствующих спутников (Si и Si') по отношению к выбранной системе координат, например системе координат (X, Y, Z), которая привязана к спутнику Si (или любой другой системе координат).
Каждый модуль МТ обработки может, таким образом, определить относительные положения каждого спутника Si' группы по отношению к своему собственному спутнику Si.
Второй измерительный субмодуль М2 может, в случае необходимости, выполнять функцию фильтрации, позволяющую ему определить относительные скорости других спутников Si' по отношению к спутнику Si, в который он вмонтирован, исходя из относительных положений каждого спутника Si' по отношению к упомянутому спутнику Si.
Как показано на фиг.2 в качестве неограничивающего примера, устройство D контроля может также содержать модуль МА анализа, предназначенный для определения рисков столкновения с другими спутниками Si' группы на основании относительных положений этих спутников Si', которые он предварительно определил. На этой стадии может быть использован любой известный специалисту тип детектирования риска столкновения.
Всякий раз, когда он определяет риск столкновения, модуль МА анализа может также и в необходимом случае определить маневр уклонения для спутника Si в зависимости от относительных положений других спутников Si' группы. В этом случае модуль МА анализа направляет инструкции, определяющие этот маневр уклонения, модулю МD контроля спутника Si, который обязан позиционировать последний. Речь идет, например, о воздействии на одно или нескольких реактивных сопел или любого другого движителя, позволяющего контролировать пространственное положение и траекторию спутников.
Модуль МА анализа или модуль дополнительного контроля может быть также предназначен для контроля возврата к строю номинальной геометрии, исходя из геометрических и кинематических условий, возникающих после осуществления маневра уклонения от столкновения и после возврата к безопасности условиям на всех спутниках.
Устройство D контроля согласно изобретению и, в частности его модуль МТ обработки, его модуль ММ измерения и, в случае необходимости, его модуль МС контроля и модуль МА анализа, могут быть выполнены в виде электронных схем, программных (или компьютерных) модулей или комбинации схем и программных продуктов.
Внутри устройства D контроля модуль ММ измерения, переключающие модули С1 и С2, модуль МР предварительной обработки, модуль МF формирования пучка, а также, в случае необходимости, модуль МС контроля могут быть объединены в единое целое, образующее датчик SR.
Изобретение не ограничивается вариантами осуществления устройства контроля и космического аппарата, описанными выше только в качестве примера, оно охватывает все варианты, которые может представить себе специалист, в рамках нижеследующей формулы изобретения.
Изобретение относится к группе космических аппаратов, например спутников, предназначенных для перемещения строем, и, в частности, касается контроля относительных положений космических аппаратов по отношению друг к другу. Устройство (D) контроля для космического аппарата группы космических аппаратов, предназначенной для перемещения согласно выбранного строя, содержит i) комплекс, по меньшей мере, из трех приемоизлучающих антенн (А1-А3), установленных на, по меньшей мере, трех сторонах разного направления своего космического аппарата, и способных излучать/принимать радиочастотные сигналы, ii) первые средства (M1) измерения, предназначенные для определения мощности сигналов, принимаемых каждой из антенн (А1-А3), и выдачи совокупностей мощностей, каждая из которых связана с одним из других космических аппаратов группы, iii) запоминающие средства (BD), предназначенные для хранения совокупностей картографических данных, каждая из которых характеризует нормализованные мощности сигналов, принятых каждой из антенн (А1-А3) в зависимости от выбранных направлений передачи, и iv) средства (МТ) обработки, предназначенные для сравнения каждой совокупности мощностей, выдаваемой первыми средствами (M1) измерения, с совокупностями хранящихся картографических данных, для определения каждого направления передачи сигналов, излучаемых другими космическими аппаратами группы по отношению к системе координат, привязанной к их космическому аппарату. Технический результат - обеспечение позиционирования группы космических аппаратов относительно друг друга с определенной точностью для обеспечения совместного выполнения задания. 2 н. и 12 з.п. ф-лы, 28 ил.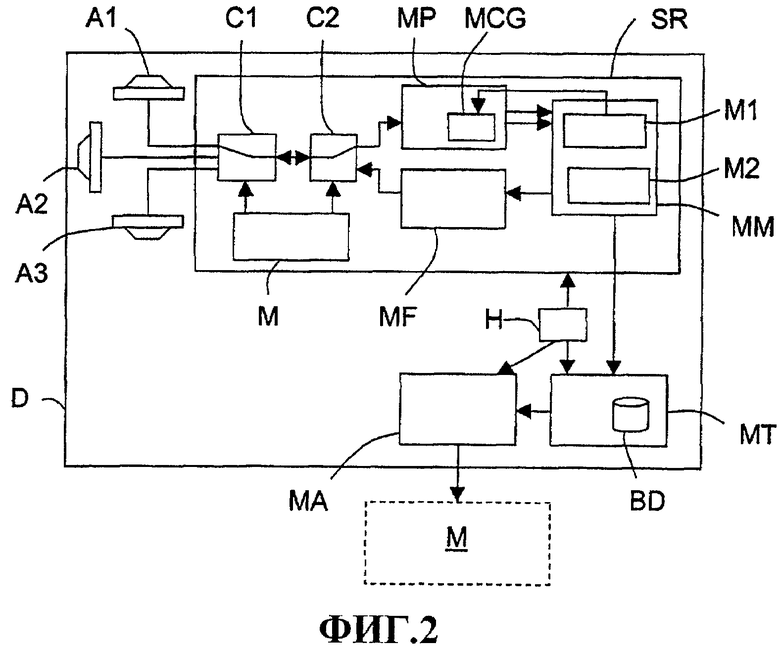
1. Устройство (D) контроля для космического аппарата (Si) группы космических аппаратов, предназначенной для перемещения согласно выбранному строю, содержащее комплекс, по меньшей мере, из трех приемоизлучающих антенн (Aj), установленных на, по меньшей мере, трех сторонах разного направления упомянутого космического аппарата (Si) и способных излучать/принимать радиочастотные сигналы, и средства (МТ) обработки, выполненные с возможностью оценки направлений передачи сигналов, излучаемых другими космическими аппаратами (Si') группы, на основании упомянутых сигналов, принимаемых упомянутыми антеннами (Aj), отличающееся тем, что оно содержит первые средства (M1) измерения, выполненные с возможностью определения мощности сигналов, принимаемых каждой из упомянутых антенн (Aj), и выдачи совокупностей мощностей, каждая из которых соответствует одному из упомянутых других космических аппаратов (Si') группы, и запоминающие средства (BD), способные хранить совокупности картографических данных, каждая из которых характеризует мощности сигналов, принимаемых каждой из упомянутых антенн (Aj) в зависимости от выбранных направлений передачи, и тем, что упомянутые средства (МТ) обработки выполнены с возможностью сравнения каждой совокупности мощностей, выдаваемой упомянутыми первыми средствами (M1) измерения, с упомянутыми совокупностями сохраняемых картографических данных для оценки каждого направления передачи сигналов, излучаемых другими космическими аппаратами (Si') группы относительно системы координат, привязанной к упомянутому космическому аппарату (Si).
2. Устройство по п.1, отличающееся тем, что упомянутые запоминающие средства (BD) выполнены с возможностью хранения совокупностей картографических данных, характеризующих мощности, нормализованные по отношению к опорному уровню, и тем, что упомянутые средства (МТ) обработки выполнены с возможностью анализа упомянутых мощностей каждой совокупности мощностей, выдаваемой упомянутыми первыми средствами (M1) измерения, для того, чтобы определить опорную мощность и применить к сигналам, принятым от того же самого космического аппарата (Si') в течение выбранного времени, выбранный коэффициент усиления для того, чтобы нормализовать мощности упомянутых принятых сигналов по отношению к упомянутой опорной мощности.
3. Устройство по одному из пп.1 или 2, отличающееся тем, что упомянутые первые средства измерения (M1) выполнены с возможностью осуществления измерений соотношения сигнал/шум для каждого из упомянутых принятых сигналов для определения мощности каждого принятого сигнала.
4. Устройство по одному из пп.1 или 2, отличающееся тем, что оно содержит средства (МС) контроля, выполненные с возможностью, в случае предоставления дополнительных временного интервала излучения и временного интервала приема каждому космическому аппарату упомянутой группы по выбранной схеме, разрезания временных интервалов излучения и приема, предоставленных их космическому аппарату (Si), на число подинтервалов излучения и подинтервалов приема, каждый из которых равен числу приемоизлучающих антенн (Aj) их космического аппарата (Si), и предоставления подинтервала излучения каждой из упомянутых приемоизлучающих антенн (Aj) в соответствии с первым выбранным предписанием и подинтервала приема каждой из упомянутых приемоизлучающих антенн (Aj) в соответствии со вторым выбранным предписанием, при этом каждой приемоизлучающей антенне (Aj) разрешается излучение в течение подинтервала излучения, который был ей предоставлен, и прием в течение подинтервала приема, который был ей предоставлен, при этом каждая выданная совокупность мощностей передается сигналами, принимаемыми упомянутыми приемоизлучающими антеннами (Aj) в течение их соответствующих подинтервалов приема.
5. Устройство по п.4, отличающееся тем, что упомянутые средства (МС) контроля выполнены с возможностью принудительного изменения упомянутого первого выбранного предписания и/или упомянутого второго выбранного предписания.
6. Устройство по п.1, отличающееся тем, что оно содержит вторые средства (М2) измерения, выполненные с возможностью оценки каждого расстояния, отделяющего их космический аппарат от одного из других упомянутых космических аппаратов (Si') группы, на основании, по меньшей мере, упомянутых сигналов, принятых каждой из упомянутых антенн (Aj), и тем, что упомянутые средства (МТ) обработки выполнены с возможностью определения относительных положений космических аппаратов упомянутой группы по отношению к выбранной системе координат, на основании упомянутых оцененных расстояний и упомянутых оцененных направлений передачи сигналов.
7. Устройство по п.6, отличающееся тем, что упомянутые вторые средства (М2) измерения выполнены с возможностью оценки каждого расстояния, отделяющего их космический аппарат (Si) от одного из других упомянутых космических аппаратов (Si') группы, на основании упомянутых сигналов, принятых каждой из упомянутых антенн (Aj), и дополнительных сигналов, передаваемых упомянутыми другими космическими аппаратами (Si') группы и характеризующих соответствующие измерения расстояний между ними (Si') и упомянутым космическим аппаратом (Si).
8. Устройство по одному из пп.6 и 7, отличающееся тем, что оно содержит средства (МА) анализа, выполненные с возможностью обнаружения рисков столкновения, на основании упомянутых относительных положений космических аппаратов упомянутой группы.
9. Устройство по п.8, отличающееся тем, что упомянутые средства (МА) анализа, выполненные с возможностью, в случае обнаружения риска столкновения, определения маневра уклонения упомянутого космического аппарата (Si) в зависимости от упомянутых относительных положений других космических аппаратов (Si') упомянутой группы.
10. Устройство по п.9, отличающееся тем, что оно содержит средства контроля, выполненные с возможностью, после маневра уклонения от столкновения, определения маневра номинальной реконфигурации космических аппаратов (Si) упомянутой группы в зависимости от их относительных положений после упомянутого маневра уклонения от столкновения.
11. Устройство по п.1, отличающееся тем, что упомянутые приемоизлучающие антенны (Aj) способны излучать и/или принимать радиочастотные сигналы в виде несущей частоты, модулированной выбранными псевдослучайными кодами.
12. Устройство по п.1, отличающееся тем, что упомянутые приемоизлучающие антенны (Aj), выполненные с возможностью излучать/принимать несущие частоты, представляющие собой частоту, принадлежащую диапазону частот, выбранному в группе, содержащей диапазоны S, SHF и EHF.
13. Устройство по п.12, отличающееся тем, что упомянутый диапазон частот является диапазоном S.
14. Космический аппарат (Si), предназначенный для перемещения полета строем в группе космических аппаратов того же типа, отличающийся тем, что он содержит устройство (D) контроля по одному из предыдущих пунктов.
| US 6072433 A, 06.06.2000 | |||
| US 4929958 A, 29.05.1990 | |||
| СЕКЦИЯ МЕХАНИЗИРОВ./\ННОй КРЕПИ | 1973 |
|
SU432294A1 |
| СПУТНИКОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2001 |
|
RU2181927C1 |
| СПУТНИКОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА | 1999 |
|
RU2152050C1 |
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |

