Изобретение касается групп космических аппаратов, например спутников, предназначенных для перемещения строем с целью совместного выполнения задачи, и, в частности, касается контроля относительных положений этих космических аппаратов по отношению друг к другу.
Как известно специалистам, некоторые группы космических аппаратов необходимо позиционировать относительно друг друга с определенной точностью для обеспечения совместного выполнения задачи. Номинально это позиционирование необходимо осуществлять во время нескольких фаз полета: развертывание после запуска, крейсерский полет и точное сохранение строя с целью выполнения задачи. Позиционирование можно также осуществлять для осуществления частичной или полной реконфигурации группы или для устранения технической неисправности (или поломки оборудования), по меньшей мере, одного из космических аппаратов.
Относительное позиционирование при помощи технологии типа GPS не всегда подходит для такого типа полета, либо потому что высота полета слишком большая по отношению к высоте созвездия GPS (“Global Positioning System” - позиционирование при помощи спутников), либо потому что требуется дополнительное или отдельное средство позиционирования.
Для обеспечения такого позиционирования было предложено оборудовать космические аппараты устройством контроля, содержащим, по меньшей мере, во-первых, приемоизлучающие антенны, в случае необходимости дополненные приемными антеннами, установленные на разнонаправленных сторонах космического аппарата и предназначенные для излучения/приема радиочастотных (РЧ) сигналов, во-вторых, «РЧ-датчик», содержащий, в частности, первые средства измерения, предназначенные для оценки разностей хода принимаемых сигналов между антеннами, и, в-третьих, средства обработки, предназначенные для оценки направлений (обычно называемых «осями визирования») передачи сигналов, которые излучаются другими космическими аппаратами группы, на основании разностей хода.
Такое устройство контроля может также содержать вторые средства измерения, предназначенные для оценки каждого расстояния, отделяющего его космический аппарат от одного из других космических аппаратов группы, на основании сигналов, принятых антеннами, и вспомогательных сигналов, переданных другими космическими аппаратами группы. В этом случае средства обработки могут определить относительные положения космических аппаратов группы по отношению к выбранной системе отсчета на основании оцененных расстояний и оцененных осей визирования.
Такое определение относительных положений позволяет контролировать космические аппараты группы для их приведения или их удержания в геометрической конфигурации, необходимой для выполнения задачи, и для принятия решения о любом маневре уклонения в случае обнаружения опасности столкновения между космическими аппаратами.
Получение сантиметровой или субсантиметровой точности относительных положений предполагает работу над фазовыми измерениями несущей. Обычно специалист знает, как измерять фазу с точностью, равной долям длины волны (как правило, 5% длины волны в окружающем пространстве с допустимыми множественными траекториями). Однако, поскольку измерения фазы известны с точностью до 2π, они являются неоднозначными, и сложность состоит в устранении этой неоднозначности.
Использование сигналов сверхвысокой частоты (в диапазоне SHF или EHF) позволяет располагать широкой частотной полосой, что облегчает задачу устранения неоднозначности при помощи технологий сканирования несущей или технологии множественных несущих. Ослабление сигнала в свободном пространстве пропорционально квадрату его частоты, поэтому, когда используют сигналы очень высокой частоты, необходима либо большая мощность излучения, либо направленная антенна, что ограничивает область использования этих очень высоких частот. Действительно, невозможно определить точные относительные положения космических аппаратов группы, если их первоначальные положения соответствуют осям с сильным наклоном.
Использование более низких частот, например в диапазоне S, выделенном для космической связи борт/земля или борт/борт (от 2 до 2,2 ГГц), позволяет применять всенаправленные антенны и низкую мощность излучения (менее одного ватта для расстояний между космическими аппаратами в несколько десятков километров). В этом диапазоне можно использовать две частоты, отличающиеся примерно на 100 МГц, для облегчения устранения неоднозначности: в этом случае комбинируют фазовые измерения по этим двум частотам для получения фазового измерения на виртуальной несущей с большей длиной волны. Возможная комбинация состоит в вычитании фазовых измерений двух частот, чтобы получить фазовое измерение, соответствующее частоте биений двух частот.
Таким образом, переходят от реальной длины волны примерно в 15 см к виртуальной длине волны примерно в 3 м. Если расстояние, разделяющее антенны, равно, например, 1 м, то разность хода оказывается в пределах от -1 м до +1 м. Использование длины волны примерно в 3 м дает в этом случае однозначное измерение этой разности хода. Однако это измерение характеризуется существенной погрешностью: если погрешность измерения на фазе двух частот составляет примерно 5% от длины волны (5% от 15 см составляют 7,5 мм), то погрешность комбинированного фазового измерения может достигать 10% от «большой» длины волны (10% от 3 м составляет 30 см).
Основными причинами погрешности являются множественность траекторий и остаточность при калибровании распространения в принимающей электронике. Эти погрешности меняются очень медленно и с трудом поддаются фильтрованию, в частности, если число космических аппаратов сводится к двум, так как в этом случае отсутствует какая-либо избыточность наблюдения.
Задачей настоящего изобретения является устранение этих недостатков, в частности, с учетом следующих замечаний:
- измерение разности хода, получаемое комбинированием двух частот, является однозначным, но приблизительным. Вместе с тем, изменение во времени разности хода не является неоднозначной величиной и может быть измерено точно при помощи одной из двух частот; и
- изменение разности хода, наблюдаемое в космическом аппарате-хозяине, может быть результатом бокового перемещения другого космического аппарата или вращения космического аппарата-хозяина, которые можно дифференцировать при помощи датчика пространственного положения (например, системы слежения за звездами).
Изобретением предлагается устройство контроля, предназначенное для космического аппарата группы космических аппаратов, предназначенной для перемещения согласно выбранному строю, и содержащее, по меньшей мере, один блок, состоящий из приемоизлучающей антенны и из двух приемных антенн, установленных в выбранных местах на одной стороне космического аппарата и способных излучать и/или принимать радиочастотные (РЧ) сигналы, и средства обработки, предназначенные для оценки направлений передачи сигналов, излучаемых другими космическими аппаратами группы, на основании сигналов, принятых антеннами блока.
Это устройство контроля отличается тем, что:
- каждая антенна каждого блока предназначена для излучения и/или приема первых и вторых РЧ-сигналов, имеющих первую и вторую выбранные частоты, разнесенные на выбранный частотный шаг,
- содержит, с одной стороны, первые средства измерения, предназначенные для определения первых и вторых разностей хода между антеннами, соответствующих первой и второе частоте и частотному шагу, на основании первых и вторых сигналов, принятых каждой из антенн блока от другого космического аппарата группы, и, с другой стороны, средства измерения пространственного положения, предназначенные для выдачи измерения вращения, которому подвергается космический аппарат, и
- его средства обработки предназначены для:
• грубой оценки направления передачи сигналов, которые излучаются другим космическим аппаратом, на основании первой и второй разностей хода, называемых первоначальными,
• подачи команды на грубое позиционирование космического аппарата таким образом, чтобы выбранная ось связанной с ним системы отсчета по существу находилась на одной линии по отношению к направлению передачи, которое было определено в результате грубой оценки,
• подачи команды, по меньшей мере, на выбранное приведение во вращение космического аппарата вокруг выбранной оси, и
• точной оценки направления передачи сигналов, излучаемых другим космическим аппаратом, на основании измерения вращения, выданного средствами измерения пространственного положения, и на основании измерения изменения первой или второй разности хода во время этого вращения, произведенного первыми средствами измерения.
Устройство в соответствии с настоящим изобретением может содержать другие отличительные признаки, взятые отдельно или в комбинации, в частности:
- перед подачей команды на приведение во вращение его средства обработки могут подать команду на стабилизацию грубого позиционирования на почти нулевой скорости, используя измерение (точное) изменения одной из: первой и второй разностей хода, произведенное первыми средствами измерения;
- его средства обработки могут быть предназначены для поддержки (в дальнейшем) точного знания направления передачи за счет измерения изменений одной из: первой и второй разностей хода;
- эти первые средства измерения могут быть предназначены:
• для определения первой и второй фаз первых и вторых сигналов, принимаемых каждой из антенн блока от другого космического аппарата,
• для определения первой и второй фаз из первых и вторых разностей фазы между приемоизлучающей антенной и каждой из двух приемных антенн,
• для определения из первых и вторых разностей фазы третьих разностей фазы, соответствующих частотному шагу (который предпочтительно соответствует длине волны, превышающей двойное расстояние между антеннами),
• для определения первых или вторых последовательных разностей фазы и третьих последовательных разностей фазы из измерений изменения первой или второй разности хода, и
• для определения измерений изменения первой или второй разности хода из однозначных измерений первой и второй разностей хода, соответствующих первой или второй частоте;
- оно может содержать вторые средства измерения, предназначенные для оценки расстояния, отделяющего его космический аппарат от другого космического аппарата группы, на основании первых и/или вторых сигналов, принимаемых, по меньшей мере, одной из антенн от другого космического аппарата. Для этого первый и/или второй сигнал, например, модулируется, с одной стороны, псевдослучайным кодом, позволяющим получить измерение псевдорасстояния, и, с другой стороны, данными, которые позволяют космическим аппаратам обмениваться информацией, в которой, как минимум, содержатся измерения их соответствующих псевдорасстояний, чтобы идентифицировать смещение синхронизации и получить измерение истинного расстояния. Измерение расстояния, полученное путем наблюдения псевдослучайного кода, отличается невысокой точностью, и его шум измерения можно снизить при помощи метода сглаживания кода несущей (хорошо известного специалистам). Наблюдение принятого псевдослучайного кода позволяет также устройству контроля космического аппарата-хозяина знать время устройства контроля другого космического аппарата, что позволяет синхронизировать периоды излучения и приема между космическими аппаратами группы;
- если используют первые и вторые средства измерения, то средства обработки (МТ) определяют относительные положения космических аппаратов по отношению к данному космическому аппарату на основании оцененных расстояний и точного оцененного направления передачи;
- его средства обработки могут уточнять измерение расстояния и/или измерение направления передачи, корректируя их с учетом эффекта множественности траекторий. Эта коррекция требует наличия табличных картографических данных множественных траекторий на космических аппаратах, полученных предварительно, например, опытным путем в безэховой камере. Использование картографической таблицы является эффективным, только если направление передачи известно с достаточной точностью, в частности с точностью, обеспечиваемой настоящим изобретением;
- оно может содержать, по меньшей мере, два блока антенн, по меньшей мере, на двух сторонах разного направления;
- оно может содержать, по меньшей мере, одну дополнительную приемоизлучающую антенну, по меньшей мере, на одной стороне, не содержащей блока антенн;
- антенны могут быть способны излучать и/или принимать первые и вторые радиочастотные сигналы в виде первой и второй несущих, по меньшей мере, одна из которых модулирована выбранным псевдослучайным кодом;
- антенны могут быть способны излучать и/или принимать первые и вторые несущие, имеющие первую и вторую частоты, входящие в частотный диапазон, выбранный из диапазонов S, SHF и EHF.
Изобретением предлагается также космический аппарат, предназначенный для перемещения строем в составе группы космических аппаратов и оборудованный описанным выше устройством контроля.
Изобретением предлагается также группа космических аппаратов, предназначенная для перемещения согласно выбранному строю, из которых, по меньшей мере, один космический аппарат содержит описанное выше устройство контроля, и из которых, по меньшей мере, некоторые космические аппараты содержат, по меньшей мере, одну приемоизлучающую антенну, установленную, по меньшей мере, на одной выбранной стороне.
Предпочтительно, хотя и не исключительно, изобретение предназначено для применения для космических аппаратов типа спутников.
Другие отличительные признаки и преимущества настоящего изобретения будут более очевидны из нижеследующего подробного описания со ссылками на прилагаемые чертежи, на которых
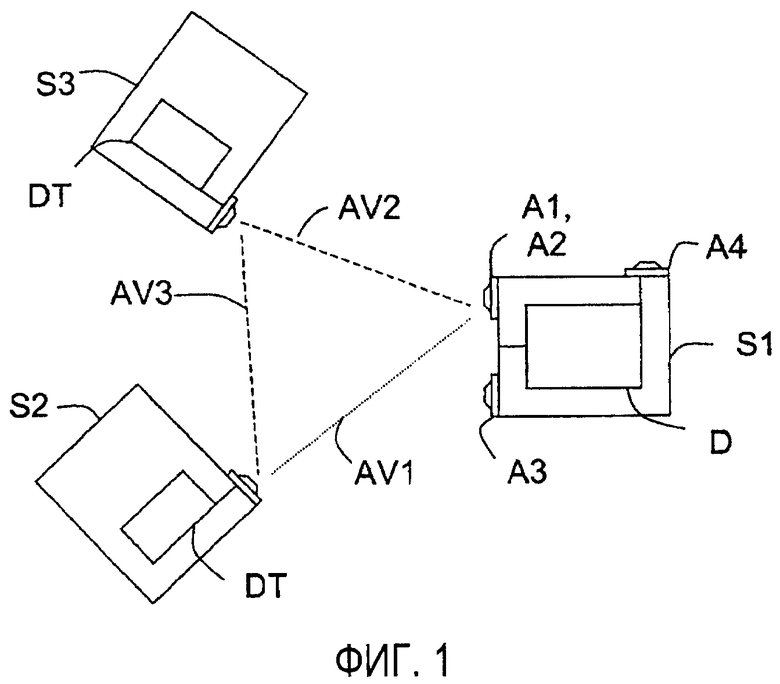
фиг. 1 - схематичный вид группы из трех спутников при полете строем, один из которых содержит устройство контроля в соответствии с настоящим изобретением;
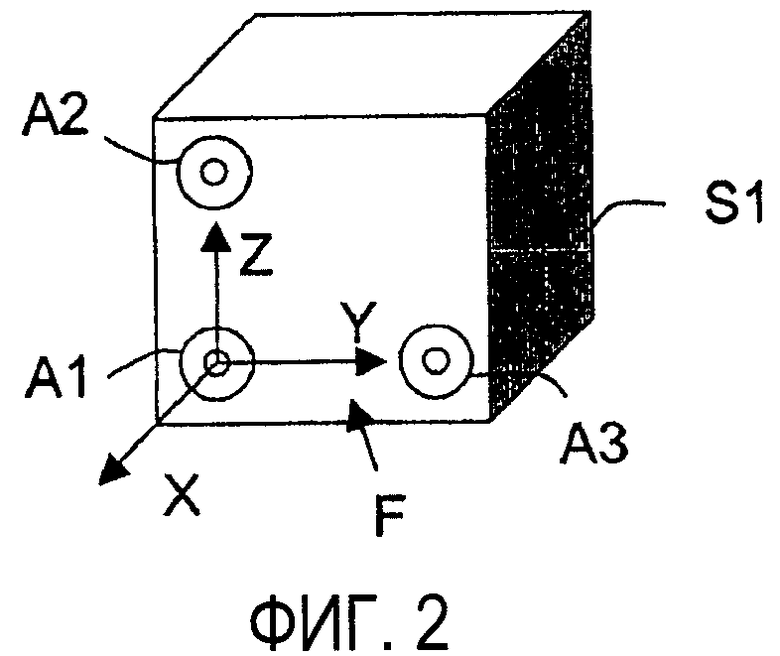
фиг. 2 - схематичный вид примера позиционирования трех антенн одного блока на стороне спутника;
фиг. 3 - схематичный вид примера выполнения устройства контроля в соответствии с настоящим изобретением;
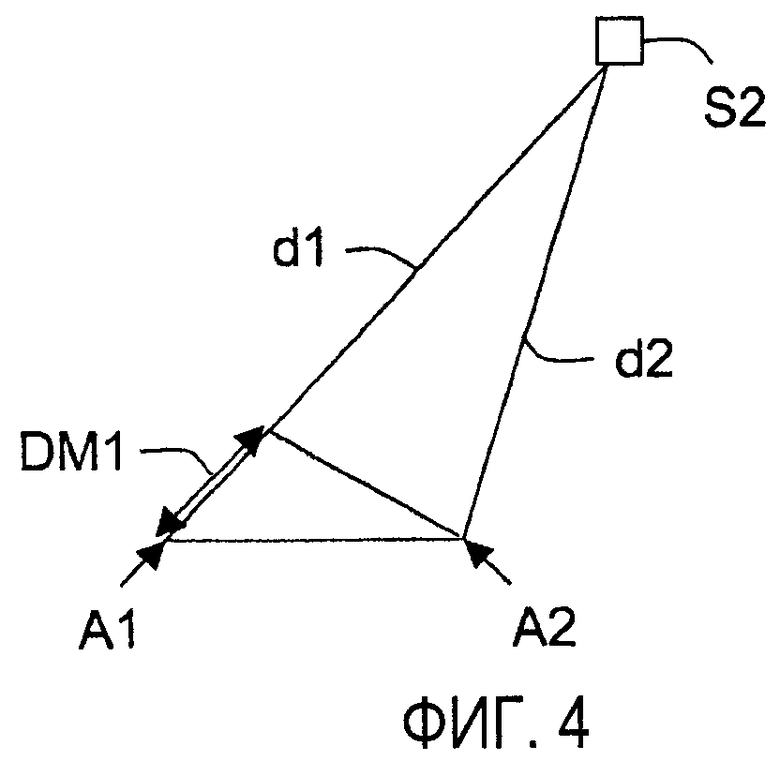
фиг. 4 - схема разности хода сигналов, излучаемых вторым спутником, между основной и вспомогательной антеннами первого спутника;
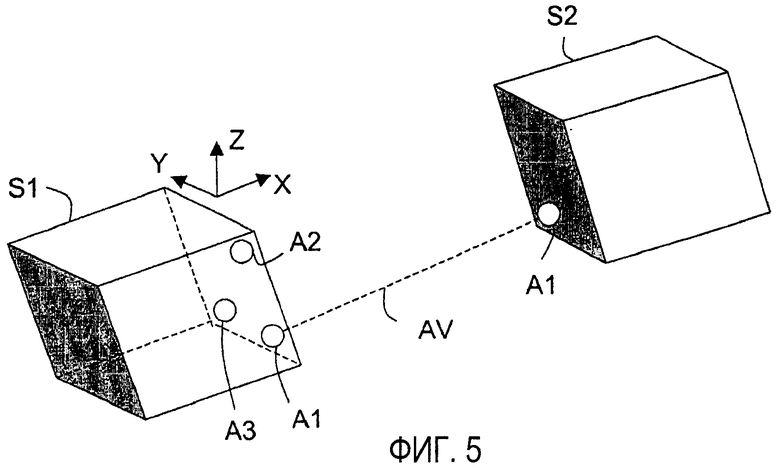
фиг. 5 - схема этапа позиционирования спутника, оборудованного устройством контроля в соответствии с настоящим изобретением, по отношению к грубо определенной оси визирования;
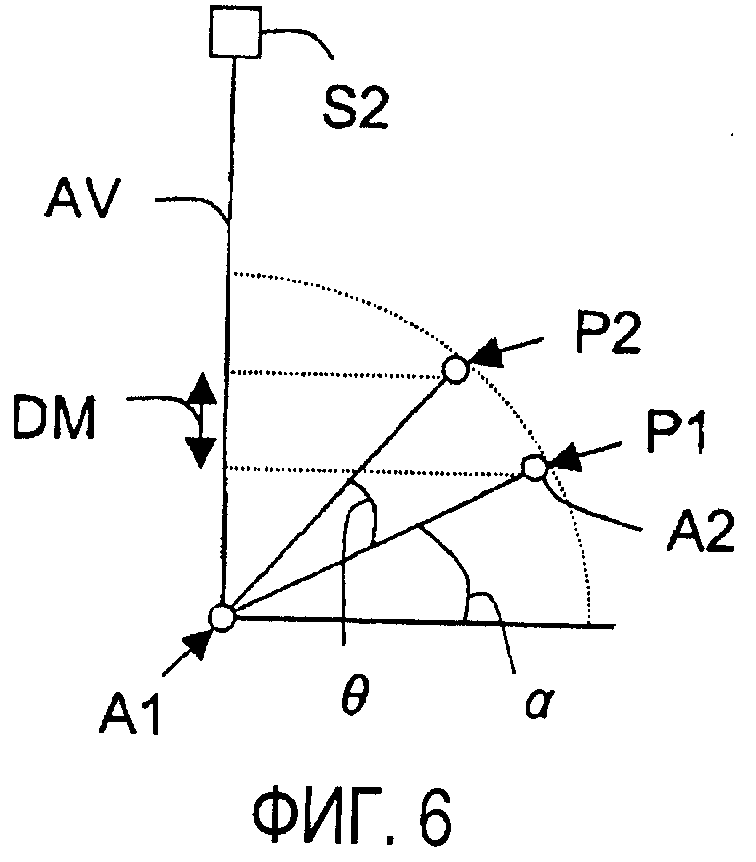
фиг. 6 - схема основных параметров, используемых в определении точных координат оси визирования при наличии вращения, рассматриваемая в двухмерном пространстве;
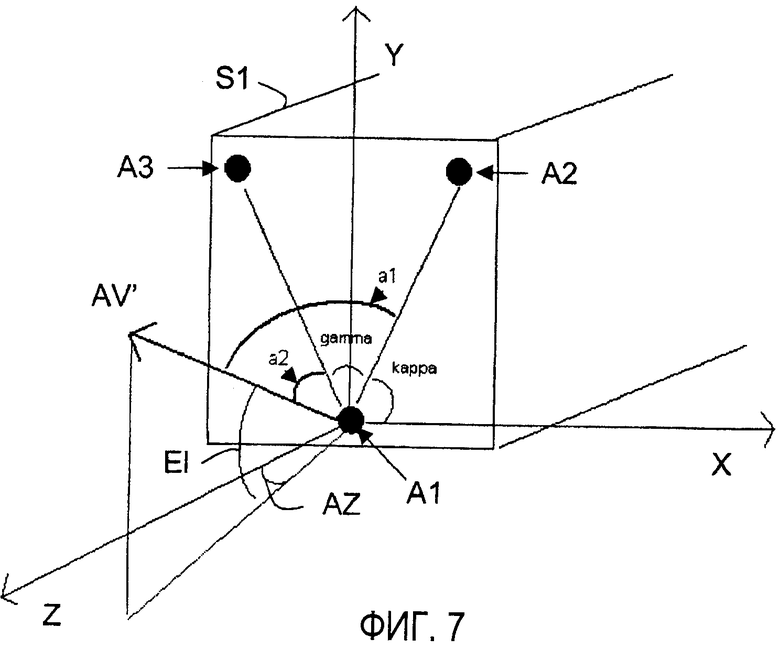
фиг. 7 - схема основных параметров, используемых в определении точных координат оси визирования при наличии вращения, рассматриваемая в трехмерном пространстве.
Прилагаемые чертежи не только служат для дополнения изобретения, но в случае необходимости могут быть использованы для его определения.
Задачей настоящего изобретения является обеспечение определения при помощи устройства контроля, установленного в космическом аппарате группы космических аппаратов, перемещающихся строем, точных осей визирования (с точностью определения координат осей визирования порядка нескольких миллиметров), а также в случае необходимости точных расстояний между космическими аппаратами (с точностью порядка сантиметра) с целью определения относительного положения космических аппаратов. Это знание относительных положений космических аппаратов группы позволяет также контролировать эти космические аппараты, чтобы приводить их и удерживать в геометрической конфигурации, необходимой для выполнения задачи, и принимать решения о любом маневре уклонения в случае обнаружения опасности столкновения между космическими аппаратами.
В дальнейшем тексте описания рассматривается неограничительный пример космических аппаратов группы, которыми являются спутники, осуществляющие полет строем с целью выполнения задачи наблюдений за космическим пространством или Землей.
Однако изобретение не ограничивается этим типом космического аппарата. Действительно, оно касается всех космических аппаратов, предназначенных для осуществления полета строем согласно выбранной конфигурации (которая, в случае необходимости, может быть изменена).
Фиг. 1-3 иллюстрируют случай группы космических аппаратов, для которой может применяться изобретение.
На фиг. 1 представлена группа из трех космических аппаратов (спутников) Si (i = от 1 до 3), совершающих полет строем. Необходимо отметить, что изобретение не ограничивается группами, содержащими три космических аппарата. Действительно, оно касается любой группы, если только она содержит, по меньшей мере, два космических аппарата.
Внутри такой группы, по меньшей мере, один из космических аппаратов, в данном случае S1, содержит устройство D контроля в соответствии с настоящим изобретением, тогда как другие космические аппараты, в данном случае S2 и S3, содержат устройство DT обработки. Разумеется, можно предусмотреть, чтобы в одной и той же группе несколько космических аппаратов и даже все космические аппараты содержали устройство D контроля в соответствии с настоящим изобретением.
Устройство D контроля в соответствии с настоящим изобретением содержит, по меньшей мере, один блок, состоящий из приемоизлучающей антенны А1, называемой основной антенной, и из двух приемных антенн А2 и А3, называемых вспомогательными антеннами. Три антенны Aj (j = от 1 до 3) блока установлены в выбранных местах на стороне F космического аппарата S1. Пример установки блока антенн на стороне F космического аппарата S1 схематично показан на фиг. 2.
Необходимо отметить, что устройство D контроля может содержать несколько блоков из трех антенн Aj, установленных на сторонах разного направления одного космического аппарата S1. Можно также предусмотреть, чтобы устройство D контроля содержало, по меньшей мере, один блок из трех антенн Aj на одной из сторон F, а также, по меньшей мере, одну другую приемоизлучающую антенну А4, называемую дополнительной антенной, по меньшей мере, на одной из других сторон (как в случае неограничительного примера, показанного на фиг. 1).
Согласно изобретению каждая главная антенна А1 (и дополнительная антенна А4) выполнена с возможностью приема первых и вторых радиочастотных (РЧ) сигналов, имеющих выбранные первую f1 и вторую f2 частоты, разнесенные на выбранный частотный шаг f3 (где f3=f2-f1). Кроме того, каждая вспомогательная антенна А2, А3 выполнена с возможностью приема первых и вторых радиочастотных сигналов.
Предпочтительно первая f1 и вторая f2 частоты входят в диапазон S. Вместе с тем, это не является обязательным условием. Действительно, они могут входить в более высокие частотные диапазоны, чем диапазон S, например в диапазон SHF или EHF.
Частотный шаг f3 между первой f1 и второй f2 частотами предпочтительно соответствует длине волны, превышающей двойное расстояние между основной антенной А1 и каждой из вспомогательных антенн А2 и А3.
В дальнейшем будем считать, что первая f1 и вторая f2 частоты входят в диапазон S. Например, f1=2,1 ГГц и f2=2,2 ГГц, что дает частотный шаг f3=100 МГц.
Каждое устройство DT обработки, которым оборудован космический аппарат S2, S3, не содержащий устройства D контроля, содержит, по меньшей мере, одну приемоизлучающую антенну А1, выполненную с возможностью передачи и приема первых и вторых радиочастотных сигналов в направлении к и от других космических аппаратов своей группы.
Каждое устройство D контроля содержит также первый модуль ММ измерения и второй модуль М2 измерения.
Первый модуль ММ измерения содержит, например, часть типа аналоговой для обработки принятых радиочастотных (РЧ) сигналов и для их преобразования в цифровые сигналы, и часть типа цифровой, предназначенную, в частности, для считывания и отслеживания сигналов, а также для производства измерений.
Как схематично показано на фиг. 3, первый модуль ММ измерения соединен, например, с антеннами Aj каждого блока (а также, в случае необходимости, с дополнительными антеннами А4) через первый С1 и второй С2 модули коммутации.
Первый модуль С1 коммутации обеспечивает соединение с одной или другой из антенн в зависимости от команд, поступающих от модуля МТ обработки, к которому вернемся ниже.
Второй модуль С2 коммутации соединен с входом/выходом первого модуля С1 коммутации, а также, с одной стороны, с входом модуля ММ измерения и, с другой стороны, с выходом модуля MF формирования первых и вторых сигналов (в части передачи). Таким образом, он обеспечивает работу устройства D контроля либо в режиме приема сигналов, либо в режиме излучения сигналов в зависимости от команд, поступающих от модуля МТ обработки.
Устройство D контроля содержит синхрогенератор Н, который показывает свое местное время и который используют для генерирования несущих частот и задания последовательности псевдослучайного кода (к которому вернемся ниже). Он выдает также синхронизирующие сигналы, необходимые для работы, по меньшей мере, некоторых из его компонентов и, в частности, необходимые для контроля передачи и приема.
Первый модуль ММ измерения содержит, по меньшей мере, один первый подмодуль М1 измерения, предназначенный для определения первых DM1 и вторых DM2 разностей хода между основной антенной А1 и вспомогательными антеннами А2 и А3, соответствующих соответственно первой частоте f1 (или второй частоте f2) и частоте f3 (равной частотному шагу между f1 и f2), на основании первых и вторых сигналов, принимаемых каждой из антенн Aj блока от другого космического аппарата S2, S3 своей группы.
На фиг. 4 схематично показан пример разности DM1 хода между основной А1 и вспомогательной А2 антеннами блока, установленного на стороне F космического аппарата S1, сигналов, излучаемых космическим аппаратом S2 этой же группы. В данном случае DM1=d1-d2, где d1 является расстоянием, отделяющим космический аппарат S2 от основной антенны А1 космического аппарата S1, а d2 - расстоянием, отделяющим космический аппарат S2 от вспомогательной антенны А2 космического аппарата S1.
Предпочтительно первый подмодуль М1 измерения производит определение первых DM1 и вторых DM2 разностей хода, соответствующих частоте f3, что будет показано ниже.
Прежде всего первый подмодуль М1 измерения определяет первую и вторую фазы соответственно первых и вторых сигналов, принятых каждой из антенн Aj блока от другого космического аппарата S2 или S3.
Каждый сигнал представляет собой, по меньшей мере, одну несущую с выбранной частотой f1 или f2. По меньшей мере, одна из двух частот f1 и f2 предпочтительно модулируется выбранным псевдослучайным кодом, что необходимо для измерения расстояния между космическими аппаратами и для синхронизации периодов излучения и приема между космическими аппаратами группы. В этом случае модуль ММ измерения предназначен для считывания псевдослучайного кода и его исключения из несущей с целью обеспечения ее анализа.
Кроме того, по меньшей мере, одна из двух несущих может быть модулирована данными, позволяющими космическим аппаратам обмениваться информацией. В этом случае модуль ММ измерения обеспечивает также функцию демодуляции несущей, чтобы обеспечить извлечение содержащихся в ней данных.
После этого, как известно специалистам, осуществляют анализ несущей при помощи первого подмодуля М1 измерения для определения первых и вторых фазовых измерений. Согласно методу, применяемому в первом подмодуле М1 измерения, можно получить либо первые и вторые фазовые измерения для каждой антенны Aj, которые после этого вычитаются для получения первых и вторых разностей фазы между основной антенной А1 и каждой из вспомогательных антенн А2 и А3 для каждой из первой f1 и второй f2 частот, либо непосредственно первые и вторые разности фазы между основной антенной А1 и каждой из вспомогательных антенн А2 и А3 для каждой из первой f1 и второй f2 частот.
Затем первый подмодуль М1 измерения выводит из первых и вторых разностей фазы третьи разности фазы, соответствующие частоте f3 (или частотному шагу). В частности, каждая третья разность фазы является фазой, которая соответствует третьему «искусственному» сигналу, искусственно построенному на основании первого и второго сигналов, принятых одной из антенн Aj, и имеющему частоту f3, равную частотному шагу f2-f1.
После этого первый подмодуль М1 измерения определяет, с одной стороны, две первые разности DM1 хода между основной антенной А1 и вспомогательной антенной А2 на основании соответственно первой или второй разности фазы и третьей разности фазы и, с другой стороны, две вторые разности DM2 хода между основной антенной А1 и вспомогательной антенной А2 на основании соответственно первой или второй разности фазы и другой третьей разности фазы.
Первый подмодуль М1 измерения предназначен также для определения первых ΔDM1 и вторых ΔDM2 изменений разности хода между основной антенной А1 и вспомогательными антеннами А2 и А3 соответственно, соответствующих первой частоте f1. Если фазовые измерения производят, например, каждую секунду, то разности хода DM1 и DM2 получают каждую секунду, и каждое изменение ΔDM1, ΔDM2 представляет собой соответствующее изменение разности DM1, DM2 хода за истекшую секунду.
Эти измерения изменения разности хода ΔDM1 и ΔDM2 являются однозначными измерениями.
Второй модуль измерения М2 предназначен для измерения пространственного положения космического аппарата S1, чтобы выдавать, по меньшей мере, измерения, характеризующие каждое вращение, которое претерпевает упомянутый космический аппарат S1. Он не зависит от модуля ММ измерения, предназначенного для обработки радиочастотных сигналов. Речь идет, например, о системе слежения за звездами.
Каждое устройство D контроля содержит также модуль МТ обработки, предназначенный для выполнения, по меньшей мере, четырех описанных ниже задач.
Первой задачей модуля МТ обработки является грубая оценка направления передачи (или оси визирования) AV-сигналов, которые излучаются другим космическим аппаратом S2, на основании первоначальных первой DM1 и второй DM2 разностей хода.
Осью визирования AV является единичный вектор (например, длина, равная одному метру), двумя из координат которого являются непосредственно разности DM1 и DM2 хода, если рассматривать систему координат, первая ось которой (Z, см. фиг. 2 и 5) связывает основную А1 и вспомогательную А2 антенны, вторая ось (Y) связывает основную А1 и вспомогательную А3 антенны и третья ось (Х) перпендикулярна к двум другим осям (Y и Z)). Третья координата не имеет значения, так как вектор AV является нормой. Необходимо отметить, что, если расстояние между антеннами не равно одному метру, координаты определяют на основании разностей хода, нормализованных расстояниями между антеннами.
Это измерение называют грубым, так как погрешность измерения по первым DM1 и вторым DM2 разностям хода усиливается соответственно соотношению длин волны, когда измерение строят на частотном шаге f3.
Второй задачей модуля МТ обработки является подача команды на маневр космического аппарата-хозяина S1 таким образом, чтобы выбранная ось (Х), в частности, ось, которая является нормалью к направлениям А1А2 (Z) и А1А3 (Y), находилась по существу на одной линии по отношению к направлению передачи (или оси визирования) AV, определенному в результате грубой оценки во время выполнения первой задачи. Для этого модуль МТ обработки вычисляет заданное значение положения в пространстве, которое должен занимать космический аппарат-хозяин S1, с учетом положения выбранной оси (Х) по отношению к направлению передачи (или оси визирования) AV, определенному в результате грубой оценки, затем он направляет это заданное значение на модуль MD контроля данного космического аппарата-хозяина S1. Другая стратегия состоит в вычислении заданного значения относительного положения, которое приводит к маневру бокового перемещения одного из двух космических аппаратов, а не к маневру вращения космического аппарата-хозяина S1. Выбор между двумя стратегиями зависит от внешних параметров, связанных с выполняемой задачей полета.
На фиг. 5 показан пример выравнивания в линию оси Х системы отсчета (X, Y, Z), связанной с космическим аппаратом S1, по отношению к оси визирования AV, определенной грубой оценкой по отношению к космическому аппарату S2. На этой стадии, поскольку точность оцененной оси визирования является средней, выравнивание в линию может быть лишь приблизительным.
Эта вторая задача предпочтительно продолжена аннулированием, по возможности, полным, относительных движений космического аппарата-хозяина S1 и другого космического аппарата S2. В данном случае преследуется цель аннулирования боковых относительных скоростей двух космических аппаратов S1 и S2, чтобы удерживать их в фиксированной относительной конфигурации.
Для этого модуль МТ обработки использует измерения изменения разностей хода первой несущей с частотой f1 или второй несущей с частотой f2. Разность хода первой несущей с частотой f1 (или второй несущей с частотой f2) является неоднозначной и точной, но ее изменение во времени не является неоднозначным, поэтому она является предпочтительным измерением скорости оси визирования. Действительно, чтобы аннулировать относительную скорость двух космических аппаратов, необходимо располагать точным измерением скорости. Трудность состоит в том, что располагают только двумя точными координатами скорости оси визирования (скорости ее координаты DM1 и скорости ее координаты DM2), тогда как вектор скорости является трехмерным. Вместе с тем, можно показать, что третьей координатой можно пренебречь, если ось визирования близка к нормали к направлениям А1А2 и А1А3, что оправдывает предыдущий этап грубого выравнивания оси визирования AV и нормали к направлениям А1А2 и А1А3.
На основании измерений скорости оси визирования AV модуль МТ обработки вычисляет маневры, которые необходимо осуществить, чтобы почти полностью аннулировать скорость оси визирования AV. Маневры можно осуществить путем изменения скорости перемещения космического аппарата S1, или изменения скорости перемещения космического аппарата S2, или изменения скорости вращения космического аппарата S1, или при помощи комбинации этих изменений. Выбранная стратегия зависит от внешних параметров, связанных с выполнением задачи полета. Если маневр должен быть осуществлен космическим аппаратом S1, модуль МТ обработки ведет диалог с модулем MD контроля своего космического аппарата S1. Если маневр должен быть осуществлен космическим аппаратом S2, передача команд на удаленный космический аппарат S2 происходит, например, при помощи основной антенны А1, например, с использованием первых и/или вторых сигналов.
Третьей задачей модуля МТ обработки является подача команды, по меньшей мере, на выбранное приведение во вращение космического аппарата S1 вокруг выбранной оси, в данном случае Х, то есть по существу вокруг определенной грубой оценкой оси визирования AV. Это вращение измеряют с точностью вторым модулем М2 измерения. Значение угла вращения не является критическим: вращение должно иметь достаточную амплитуду, чтобы достичь точности, необходимой для четвертой задачи модуля МТ обработки (как правило, несколько десятков градусов).
Во время этого вращения модуль МТ обработки при помощи первого подмодуля М1 измерения регистрирует изменение разностей ΔDM1 и ΔDM2 хода по первой несущей, имеющей частоту f1, или по второй несущей, имеющей частоту f2.
Четвертой задачей модуля МТ обработки является точная оценка оси визирования между двумя космическими аппаратами S1 и S2 на основании измерения вращения, выданного вторым модулем М2 измерения (связанного с положением в пространстве), и измерений изменений разностей ΔDM1 и ΔDM2 хода на первой несущей, имеющей частоту f1, или на второй несущей, имеющей частоту f2, полученных от первого подмодуля М1 измерения.
Далее со ссылкой на неограничительный пример, показанный на фиг. 6 и 7, следует подробное описание этой процедуры точной оценки оси визирования. В дальнейшем позицией AV будет обозначаться ось визирования, полученная в результате грубой оценки (перед вращением), и позицией AV' - ось визированная, определенная путем точной оценки.
На фиг. 6 в двух измерениях показано вращение космического аппарата S1 по отношению к оси, перпендикулярной к оси визирования AV (определенной грубой оценкой). В данном случае показано только перемещение вспомогательной антенны А2 из первоначального положения Р1 (до вращения) в конечное положение Р2 (после вращения на угол θ). Этот угол вращения θ точно измерен вторым модулем М2 измерения (пространственного положения), например, типа системы слежения за звездами. Вращение на угол θ приводит к изменению первой разности DM1 хода между основной А1 и вспомогательной А2 антеннами, которое определяют при помощи модуля МТ обработки на основании первых измерений первоначальной (до вращения) и дополнительной (после вращения) разностей хода, выданных первым подмодулем М1 измерения. Зная расстояние BL1, разделяющее основную А1 и вспомогательную А2 антенны, и изменение первой разности DM1 хода (по первой несущей с частотой f1 или по второй несущей с частотой f2), выводят первоначальный угол α отклонения направления А1А2 (Z) по отношению к оси визирования AV'. Такие же операции осуществляют для основной антенны А1 и другой вспомогательной антенны А3 и выводят совокупность результатов точных координат, определяющих ось визирования AV'.
Следует отметить, что этот пример двухмерного пространства (2D) не полностью соответствует реальному случаю трехмерного пространства (3D). В реальном случае можно показать, что одного вращения вокруг оси (Х), перпендикулярного к направлениям А1А2 (Z) и А1А3 (Y), достаточно для определения точной оси визирования AV' (S1S2) в системе координат, связанной с космическим аппаратом S1.
Далее со ссылками на фиг. 7 следует описание более сложной модели по сравнению с двухмерной. В данном случае используют ось Z системы отсчета (X, Y, Z), связанной с космическим аппаратом S1, для наведения на космический аппарат S2. В данном случае ось Z определяет ось, которая была выровнена по отношению к грубо оцененной оси визирования AV.
На фиг. 7 позицией AZ обозначен азимут точной оси визирования AV', и позицией EL обозначено возвышение точной оси визирования AV' по отношению к плоскости ZX.
Прежде всего необходимо определить отношение между углом вращения θ космического аппарата S1 вокруг оси Z, изменениями разности хода и координатами грубой оси визирования AV (до вращения). При наличии параллельных входных сигналов можно показать, что разность хода можно определить как проекцию вектора А1А2 на ось визирования AV.
Следовательно, если позицией BL1 обозначить вектор между основной А1 и вспомогательной А2 антеннами, а позицией VLoS - единичный вектор грубой оси визирования AV, то получают следующее отношение:
В системе отсчета (X, Z, Y), связанной с космическим аппаратом S1, единичный вектор VLoS (который определяет координаты точной оси визирования AV', оценку которой необходимо произвести) определяют следующим образом:
Координаты двух вспомогательных антенн А2 и А3 в вышеуказанной системе координат хорошо известны и представлены следующим образом:
Перед вращением на угол θ первая DM1 и вторая DM2 разности хода отвечают следующим отношениям:
После вращения на угол θ (который определен матрицей вращения Rot (θ)) векторы BL1(θ) и BL2(θ), характеризующие соответственно расстояния между основной антенной А1 и вспомогательными антеннами А2 и А3 в вышеуказанной системе отсчета, отвечают следующим отношениям:
Следовательно, первая DM1(θ) и вторая DM2(θ) дополнительные разности хода отвечают следующим отношениям:
В этом случае изменения первой и второй разностей хода (соответствующих выбранной частоте f1 или f2) можно записать следующим образом:

Используя следующую матричную форму:
получают следующее отношение, где показатель обозначает транспонированный матричный элемент:

Поскольку это последнее выражение трудно поддается инверсии, так как его первый член (BL1', BL2') представляет собой матрицу типа 2×3, то приходится возвращаться к двум измерениям вместо трех. Это становится возможным за счет того, что, с одной стороны, вектор VLoS является единичным и, следовательно, его координата Z не представляет интереса, так как она выводится из его координат Х и Y, и, с другой стороны, осуществляют вращение на угол θ вокруг оси Z. Следовательно, предыдущую формулу можно переписать для двух измерений (в плоскости X, Y) следующим образом:
Как только модуль МТ обработки получает координаты оси визирования (грубые до вращения), он может в любой момент определить точные координаты этой оси визирования путем интегрирования изменений разности хода ΔDM1 и ΔDM2. В варианте знание точной оси визирования AV' используют для устранения неоднозначности по измерениям DM1 и DM2, осуществленным на первой частоте f1 (или на второй частоте f2), затем для сохранения неоднозначности на основании изменений разности хода ΔDM1 и ΔDM2.
Если есть другие космические аппараты (например S3), оборудованные устройством DT, такую же процедуру можно повторить между космическими аппаратами S1 и S3 для точного измерения оси визирования S1S3 в системе координат, связанной с космическим аппаратом S1. Во время осуществления этой процедуры между космическими аппаратами S1 и S3 необходимо следить, чтобы космический аппарат S2 оставался в пределах видимости космического аппарата S1. Действительно, если РЧ-связь между космическими аппаратами S1 и S2 прерывается, знание точной оси визирования AV' (S1S2) может быть утеряно, и придется возобновлять процедуру между космическими аппаратами S1 и S2.
Если есть, по меньшей мере, один другой космический аппарат (например, S4), оборудованный устройством D, то космический аппарат S4 может сам точно определить оси визирования других космических аппаратов в своей собственной системе координат при помощи такой же процедуры. Необходимость оснащения нескольких космических аппаратов группы устройством D вместо устройства DT зависит от задачи полета.
После точного определения оси визирования эту точность можно еще повысить, если предварительно была разработана табличная картография множественных траекторий и сохранена в виде картографических данных. В этом случае модуль МТ обработки вычитает известное влияние множественных траекторий из измерений разностей хода по сигналам, имеющим первую частоту f1. Этот метод является особенно эффективным, когда множественные траектории являются следствием локальных отражений на данном космическом аппарате. В этом случае погрешность, связанная с множественностью траекторий, полностью зависит от направления поступающего сигнала.
Следует отметить, что приведенные выше матричные формулы упрощены, чтобы облегчить понимание изобретения. В действительности их может усложнить ряд вторичных эффектов:
- в конце фазы аннулирования боковой скорости может сохраняться остаточная скорость,
- вращение по команде модуля МТ обработки может отличаться от вращения, действительно совершаемого космическим аппаратом, в частности истинная ось вращения может отклоняться по отношению к оси, перпендикулярной к направлениям А1А2 и А1А3,
- радиочастотные волны, принимаемые различными антеннами Aj, не являются абсолютно параллельными, если расстояние между космическими аппаратами S1 и S2 не является очень большим по сравнению с расстоянием между антеннами А1, А2 и А3.
Вместе с тем эти эффекты специалист может корректировать путем усложнения формул на основании упрощенных формул.
Независимо от измерения точной оси визирования AV', устройства D и DT могут быть выполнены с возможностью измерения расстояния, разделяющего космические аппараты.
Для этого, предпочтительно в своем первом модуле ММ измерения, устройство D контроля должно содержать второй подмодуль М3 измерения. В частности, последний предназначен для оценки каждого расстояния, отделяющего его космический аппарат S1 от другого космического аппарата S2 этой же группы, на основании, по меньшей мере, первых и/или вторых сигналов, принимаемых, по меньшей мере, одной из антенн и предпочтительно приемоизлучающей антенной А1 (или А4) и поступающих от этого другого космического аппарата S2.
В дальнейшем в качестве иллюстративного, а не ограничительного примера будем считать, что второй подмодуль М3 измерения производит оценку расстояний между космическими аппаратами на основании первых сигналов, принятых основной антенной А1.
В силу временных смещений, связанных с отсутствием синхронизации между синхрогенераторами Н космических аппаратов S1 и S2, второй подмодуль М3 измерения предпочтительно производит оценку расстояния не только на основании первых сигналов, принятых основной антенной А1 от другого космического аппарата S2, но также на основании вспомогательных сигналов, передаваемых этим другим космическим аппаратом S2.
Как было указано выше, предпочтительно эти вспомогательные сигналы представляют собой модуляцию несущей первого сигнала при помощи выбранного псевдослучайного кода, а также, в случае необходимости, при помощи данных информации таким образом, чтобы излучаемый сигнал являлся отображением местного времени передающего космического аппарата и чтобы наблюдение этого сигнала позволило получить измерение псевдорасстояния.
Сравнивания свое собственное измерение псевдорасстояния с измерением, переданным другим космическим аппаратом S2 в виде данных информации в вспомогательных сигналах, второй подмодуль М3 измерения может изолировать смещение синхронизации и определить расстояние между космическими аппаратами (S1, S2). Действительно истинное расстояние равно половине суммы псевдорасстояния, измеренного космическим аппаратом S1 по первому сигналу, переданному космическим аппаратом S2, и псевдорасстояния, измеренного космическим аппаратом S2 по первому сигналу, переданному космическим аппаратом S1.
Измерение расстояния, полученное путем анализа псевдослучайного кода, является однозначным, но характеризуется посредственной точностью, так как длина волны псевдослучайного кода обычно намного больше, чем длина волны несущей. Если точность измерения расстояния, полученного путем наблюдения псевдослучайного кода, выше, чем половина длины волны частоты f3, то это приблизительное измерение расстояния позволяет снять неоднозначность на измерении расстояния, полученном на основании фазовых измерений на частоте f3 (осуществленных на основных антеннах космических аппаратов S1 и S2). Таким образом, получают измерение расстояния лучшего качества, чем измерение, полученное на основании псевдослучайного кода. Вместе с тем, качество этого измерения расстояния является еще слишком низким, чтобы решить проблему неоднозначности на измерении расстояния, полученном на основании фазовых измерений частоты, так как точность фазовых измерений на f3 ухудшилось в отношении длин волн f3/f1.
В этом случае предусматривают последний этап, чтобы достичь сантиметровой точности в измерении расстояния. Для этого предпочтительно комбинируют три метода.
Первый метод состоит в сглаживании шумов измерения. Этот первый метод, хорошо известный специалистам, состоит, в частности, в фильтровании однозначного, но сильно зашумленного количества при помощи скорости изменения, если она известна в мало зашумленном состоянии. В данном случае измерение расстояния, полученное на основании псевдослучайного кода, сглаживают скоростью, полученной на основании изменения фазовых измерений по первому сигналу (f1). Затем сглаживают измерение расстояния, полученное на основании фазовых измерений по частотному шагу f3, при помощи скорости, полученной на основании изменения фазовых измерений по первому сигналу (f1). При этом ставится цель снижения шума на расстоянии. Этот метод позволяет снизить шум измерения, но не уменьшает погрешности типа «медленно меняющихся смещений», которые появляются в результате множественности траекторий и распространения сигналов в электронике приема и передачи сигналов.
Второй метод состоит в корректировке эффекта распространения (задержки распространения и фазового сдвига распространения) в электронике передачи и приема при помощи автоматического калибрования. Доля амплитуды всех сигналов, которые направляются модулем SR на основную антенну А1, переправляется обратно в модуль SR.
Анализ этих сигналов в модуле ММ измерения позволяет точно измерить количество, соответствующее распространению в принимающей электронике космического аппарата S1 и распространению в передающей электронике космического аппарата S1. Этот же метод используют в космическом аппарате S2 для измерения количества, соответствующего распространению в принимающей электронике космического аппарата S2 и распространению в передающей электронике космического аппарата S2.
Каждое из этих двух изолированных количеств не представляет интереса, однако сумму этих двух количеств можно переписать как сумму электронного распространения на пути от S1 к S2 и электронного распространения на пути от S2 к S1. Эта сумма позволяет скорректировать расстояние, так как оно является результатом суммы псевдорасстояния между космическим аппаратом S1 и космическим аппаратом S2 и псевдорасстояния между космическим аппаратом S2 и космическим аппаратом S1.
Эта корректировка содержит столько же составляющих, сколько их содержится в переданных сигналах (распространение псевдослучайного кода, распространение несущей частоты f1 и распространение несущей частоты f2). Следовательно, она позволяет корректировать расстояние, полученное при помощи псевдослучайного кода, и расстояния, полученные на несущих с частотами f1, f2 и f3.
Третий метод состоит в корректировке эффекта множественности траекторий с использованием табличной картографии этих множественных траекторий на космическом аппарате S1 и на космическом аппарате S2. Использование такой картографии требует точного знания оси визирования AV (S1S2) в системе координат, связанной с S1 (что осуществляют при помощи метода, описанного выше). Оно требует также знания оси визирования S2S1 в системе координат, связанной с S2, что может быть достигнуто, поскольку либо S2 оборудован устройством D, либо он оборудован устройством DT, дополненным датчиком пространственного положения. Действительно, можно показать, что знание оси визирования AV (S1S2) в системе координат, связанной с S1, и знание пространственного положения космического аппарата S2 являются достаточными для определения оси визирования S2S1 в системе координат, связанной с S2.
Зная точно определенное оценкой значение расстояния между космическими аппаратами d(S1, S2) или d(S1, S3) и точно определенное оценкой значение координат соответствующей оси визирования AV1 или AV2, модуль МТ обработки определяет в этом случае относительные положения двух космических аппаратов S2 и S3 относительно системы отсчета (X, Y, Z), которая связана с его космическим аппаратом S1 (или относительно любой другой системы отсчета, связанной с космическим аппаратом S1).
Как уже было показано на неограничительном примере со ссылками на фиг. 3, устройство D контроля может также содержать модуль МА анализа, предназначенный для контроля космических аппаратов группы для их приведения и удержания в геометрической конфигурации, требуемой для выполнения задачи, и для принятия решения по любому маневру уклонения в случае обнаружения опасности столкновения между космическими аппаратами. На этой стадии можно применять любой известный специалистам тип контроля положения космических аппаратов группы и обнаружения опасности столкновения.
Каждый раз при обнаружении опасности столкновения модуль МА анализа может также и, в случае необходимости, определить маневр уклонения для своего космического аппарата S1 в зависимости от относительных положений других космическим аппаратов группы.
Устройство D контроля в соответствии с настоящим изобретением и, в частности, его модуль МТ обработки, его первый ММ и второй М2 модули измерения и, при наличии, его модуль МА анализа могут быть выполнены в виде электронных схем, программных (или компьютерных) модулей или в виде комбинации схем и программных средств.
Внутри устройства D контроля первый модуль ММ измерения, модули коммутации С1 и С2, модуль формирования луча MF, а также, в случае необходимости, второй модуль М2 измерения (положения в пространстве) могут быть объединены в блок, образующий двухчастотный датчик SR.
Если изобретение работает в диапазоне S, можно использовать ненаправленные антенны и, следовательно, можно получать сантиметровую точность по относительным положениям космических аппаратов, выполняющих полет строем, независимо от их первоначальных относительных положений, и, в частности, когда оси визирования имеют изначально слабый или сильный наклон.
Кроме того, изобретение может служить для введения точных относительных положений в устройства контроля из предшествующего уровня техники, работающие, например, в диапазоне SHF или EHF или на основе оптических сигналов и требующие точного предварительного позиционирования, для обеспечения возможности определения относительных положений космических аппаратов с еще более высокой точностью, как правило, на один или несколько порядков выше.
Изобретение не ограничивается описанными выше вариантами выполнения устройства контроля и космического аппарата, представленными только в качестве примеров, и охватывает все варианты, которые может предусмотреть специалист в рамках прилагаемой формулы изобретения.
Изобретение относится к группе космических аппаратов, например спутников, предназначенных для перемещения строем и, в частности, касается контроля относительных положений космических аппаратов по отношению друг к другу. Устройство (D) контроля для космического аппарата (Si) группы космических аппаратов, перемещающихся строем, содержит: i) комплекс, состоящий из трех антенн (А1-А3), установленных на одной стороне космического аппарата (S1) и способных излучать и/или принимать первые и вторые РЧ-сигналы, имеющие первую и вторую частоты, отличающиеся на выбранный частотный шаг; ii) первые средства (M1) измерения, предназначенные для определения первых и вторых разностей хода между антеннами (А1-А3), соответствующих первой частоте и частотному шагу, на основании первых и вторых сигналов, принятых антеннами и поступивших от другого космического аппарата; iii) вторые средства (М2) измерения, предназначенные для осуществления измерений вращения, которому подвергается космический аппарат (S1); и iv) средства (МТ) обработки, предназначенные для: а) грубой оценки направления передачи принятых сигналов на основании первоначальных первой и второй разностей хода, б) подачи команды на позиционирование космического аппарата (S1) таким образом, чтобы выбранная ось связанной с ним системы отсчета по существу находилась на одной линии по отношению к грубому направлению передачи, в) подачи команды на приведение во вращение космического аппарата (S1) вокруг выбранной оси, г) точной оценки направления передачи сигналов, излучаемых другим космическим аппаратом (Si'), на основании измерения вращения и измерения изменения первой или второй разности хода, возникшей в результате упомянутого вращения. Технический результат - обеспечение точности определения координат осей визирования и расстояний между космическими аппаратами при определении относительного положения космических аппаратов. 3 н. и 12 з.п. ф-лы, 7 ил.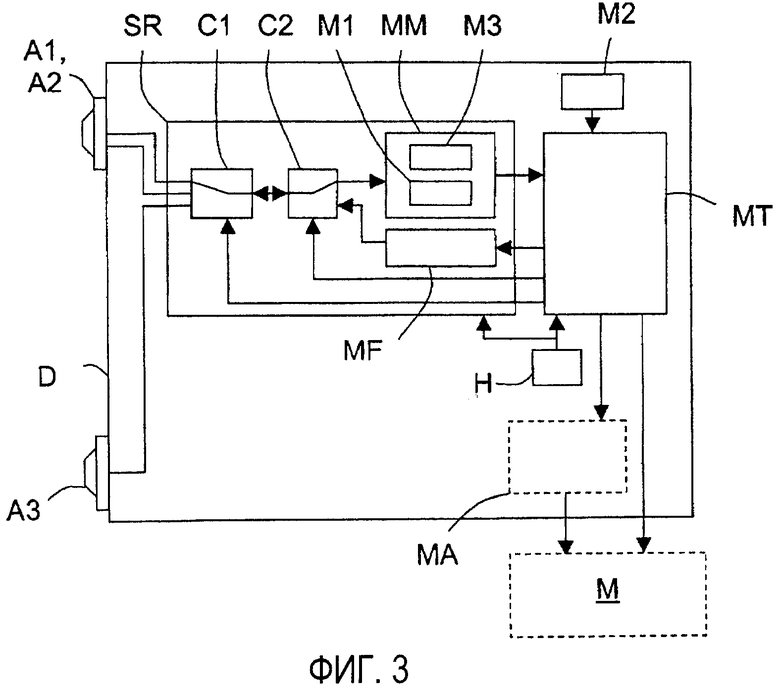
1. Устройство (D) контроля для космического аппарата (Si) группы космических аппаратов, предназначенной для перемещения согласно выбранному строю, содержащее, по меньшей мере, один блок, состоящий из приемоизлучающей антенны (А1) и из двух приемных антенн (А2, A3), установленных в выбранных местах на одной стороне упомянутого космического аппарата (Si) и способных излучать и/или принимать радиочастотные сигналы, и средства (МТ) обработки, выполненные с возможностью оценки направлений передачи сигналов, излучаемых другими космическими аппаратами группы, на основании упомянутых сигналов, принятых упомянутыми антеннами (А1-А3), отличающееся тем, что каждая антенна (А1-А3) упомянутого блока выполнена с возможностью излучения и/или приема первых и вторых сигналов, имеющих первую и вторую выбранные частоты, разнесенные на выбранный частотный шаг, и тем, что содержит i) первые средства (M1) измерения, выполненные с возможностью определения первых и вторых разностей хода между антеннами (А1-А3), соответствующих первой и второй частоте и упомянутому частотному шагу, на основании первых и вторых сигналов, принятых каждой из упомянутых антенн упомянутого блока от другого космического аппарата (Si') упомянутой группы, и ii) средства (М2) измерения пространственного положения, выполненные с возможностью выдачи измерений вращения, которому подвергается упомянутый космический аппарат (Si), и тем, что упомянутые средства (МТ) обработки выполнены с возможностью а) грубой оценки направления передачи сигналов, излучаемых упомянутым другим космическим аппаратом (Si'), на основании первой и второй разностей хода, называемых первоначальными, б) подачи команды на грубое позиционирование упомянутого космического аппарата (Si) таким образом, чтобы выбранная ось (X) системы отсчета, связанной с упомянутым космическим аппаратом, по существу, находилась на одной линии по отношению к упомянутому направлению передачи, определенному в результате грубой оценки, в) подачи команды, по меньшей мере, на выбранное приведение во вращение упомянутого космического аппарата (Si) вокруг упомянутой выбранной оси (X), г) точной оценки упомянутого направления передачи сигналов, излучаемых упомянутым другим космическим аппаратом (Si'), на основании измерения вращения, выданного упомянутыми средствами (М2) измерения пространственного положения, и на основании измерения изменения первой или второй разности хода в результате упомянутого вращения, произведенного упомянутыми первыми средствами (M1) измерения.
2. Устройство по п.1, отличающееся тем, что упомянутые средства (МТ) обработки выполнены с возможностью перед подачей команды на упомянутое приведение во вращение создания инструкций, предназначенных для подачи команды на стабилизацию грубого позиционирования на почти нулевой скорости упомянутого космического аппарата (Si), на основании упомянутого измерения изменения одной из первой и второй разностей хода, произведенного упомянутыми первыми средствами (M1) измерения.
3. Устройство по одному из пп.1 или 2, отличающееся тем, что упомянутые средства обработки выполнены с возможностью поддержки точного знания упомянутого направления передачи на основании упомянутых измерений изменения одной из первой и второй разностей хода.
4. Устройство по одному из пп.1 или 2, отличающееся тем, что упомянутые первые средства (M1) измерения выполнены с возможностью i) определения первой и второй фаз первых и вторых сигналов, принимаемых каждой из упомянутых антенн (А1-А3) упомянутого блока, от упомянутого другого космического аппарата (Si'), ii) определения упомянутых первых и вторых фаз из первой и второй разностей фазы между упомянутой приемоизлучающей антенной (А1) и каждой из упомянутых приемных антенн (А2, A3), iii) определения из упомянутых первых и вторых разностей фазы третьих разностей фазы, соответствующих упомянутому частотному шагу, iv) определения первых или вторых последовательных разностей фазы и третьих последовательных разностей фазы из измерений изменения первой или второй разности хода, и v) определения измерений изменения первой или второй разности хода из однозначных измерений упомянутых первой и второй разностей хода, соответствующих первой или второй частоте.
5. Устройство по п.1, отличающееся тем, что содержит вторые средства (М3) измерения, выполненные с возможностью оценки расстояния, отделяющего их космический аппарат (Si) от упомянутого другого космического аппарата (Si') группы, на основании упомянутых первых и/или вторых сигналов, принимаемых, по меньшей мере, одной из упомянутых антенн (А1-А3), от упомянутого другого космического аппарата (Si'), и тем, что упомянутые средства (МТ) обработки выполнены с возможностью определения относительных положений упомянутых космических аппаратов (Si') по отношению к их космическому аппарату (Si) на основании упомянутых оцененных расстояний и упомянутого точного оцененного направления передачи.
6. Устройство по п.5, отличающееся тем, что упомянутые вторые средства (М3) измерения выполнены с возможностью оценки расстояния, отделяющего их космический аппарат (Si) от упомянутого другого космического аппарата (Si') группы, на основании упомянутых первых и/или вторых сигналов, принятых, по меньшей мере, одной из упомянутых антенн (А1-А3), от упомянутого другого космического аппарата (Si'), и вспомогательных сигналов, переданных упомянутым другим космическим аппаратом (Si') и характеризующих расстояние, отделяющее его от упомянутого космического аппарата (Si).
7. Устройство по одному из пп.5 или 6, отличающееся тем, что упомянутые средства (МТ) обработки выполнены с возможностью корректировки упомянутого измерения расстояния и/или упомянутого точного измерения направления передачи с учетом эффекта, вызванного множественностью траекторий, на основании хранящихся картографических данных и упомянутого направления передачи сигналов.
8. Устройство по п.1, отличающееся тем, что содержит, по меньшей мере, два блока антенн, по меньшей мере, на двух сторонах разного направления.
9. Устройство по п.1, отличающееся тем, что содержит, по меньшей мере, одну дополнительную приемоизлучающую антенну (А4), по меньшей мере, на одной стороне, не содержащей блока антенн.
10. Устройство по п.1, отличающееся тем, что упомянутые антенны (А1-А3) способны излучать и/или принимать первые и вторые радиочастотные сигналы в виде первой и второй несущих, по меньшей мере, одна из которых модулирована выбранным псевдослучайным кодом.
11. Устройство по п.1, отличающееся тем, что упомянутый частотный шаг соответствует длине длины волны, по меньшей мере, равной двойному расстоянию, отделяющему упомянутую приемоизлучающую антенну (А1) от каждой из упомянутых приемных антенн (А2, A3).
12. Устройство по п.1, отличающееся тем, что упомянутые антенны (А1-А3) выполнены с возможностью излучения/приема первых и вторых несущих, имеющих первую и вторую частоты, принадлежащие частотному диапазону, выбранному в группе, содержащей диапазоны S, SHF и EHF.
13. Устройство по п.12, отличающееся тем, что упомянутый частотный диапазон является диапазоном S.
14. Космический аппарат (S1), предназначенный для перемещения строем в составе группы космических аппаратов, отличающийся тем, что содержит устройство (D) контроля по одному из предыдущих пунктов.
15. Группа космических аппаратов (Si'), предназначенная для перемещения согласно выбранному строю, отличающаяся тем, что, по меньшей мере, один из упомянутых космических аппаратов (S1) содержит устройство (D) контроля по одному из пп.1-13, и тем, что, по меньшей мере, некоторые из других космических аппаратов (S2, S3) содержат, по меньшей мере, одну приемоизлучающую антенну (А1), установленную, по меньшей мере, на одной выбранной стороне.
| US 6072433 A, 06.06.2000 | |||
| Колпак сеточной части бумагоделательной машины | 1978 |
|
SU777128A1 |
| СПУТНИКОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2001 |
|
RU2181927C1 |
| СПУТНИКОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА | 1999 |
|
RU2152050C1 |
| WO 9622546 A1, 25.07.1996. | |||

