Изобретение относится к области экспериментальных методов механики деформируемого твердого тела и может быть использовано как средство для определения коэффициента трения гибких тел (нитей, лент, проволоки, канатов и т.п.).
Известен способ определения коэффициента трения (см. Андреев А.В. Передача трением. - М.: Машиностроение, 1978, с.90, рис.48), заключающийся в том, что коэффициент трения определяется в процессе перемещения гибкого тела между двумя контртелами, сжатыми нормальной силой P.
Здесь для определения коэффициента трения нормальная сила (нагрузка) задается извне исходя из априорной информации. Однако специфической особенностью трения гибких тел является сложность измерения именно нормальной нагрузки в контакте, т.е. ее величина и является неизвестной, т.к. значение нагрузки в процессе скольжения может заметно изменяться в зависимости от колебания силы протягивания. Кроме того, наличие трения одновременно по двум поверхностям гибкого тела не является типичным случаем для устройств и механизмов, где применяются передачи с гибкой связью. Поэтому способ-аналог может быть использован только для ориентировочных оценок фрикционных характеристик в зоне трения.
Известен также способ определение коэффициента трения (Мур Д. Основы и применение трибоники. - М.: Мир, 1978, с.295-297), заключающийся в том, что коэффициент трения определяется в процессе перемещения гибкого тела по поверхности испытуемого образца.
Однако и в способе-прототипе нормальная нагрузка также задается искусственно внешними устройствами (гидравлическим цилиндром и двухсторонней системой сопел), а не формируется в результате естественного силового взаимодействия гибкого тела и испытуемого образца. Это исключает возможность изучения реального процесса трения в условиях динамического нагружения и существенно снижает достоверность и точность измерений.
Известно устройство для определения коэффициента трения, содержащее прижимные плиты, гибкое тело, динамометр (см. Андреев А.В. Передача трением. - М.: Машиностроение, 1978, с.90, рис.48). С помощью этого устройства коэффициент трения определяется в процессе перемещения гибкого тела между двумя плитами, сжатыми нагрузкой Р.
Основным недостатком этого устройства-аналога является наличие в конструкции двух плит, между которыми скользит гибкое тело. Такая схема испытаний не всегда соответствует реальной ситуации приложения сил, когда трение имеет место лишь по одной из поверхностей, что характерно, например, для пары лента (гибкое тело) - магнитная головка, а также для других подобных узлов трения. В результате при измерении происходит некое усреднение сил трения по внешней и внутренней стороне гибкого тела, хотя условия трения на этих поверхностях могут заметно различаться. Кроме того, в этом случае важное значение приобретает и равномерность прилегания сжимающих плит, а также колебания толщины гибкого тела по длине. Все эти факторы существенно влияют на точность и достоверность определения коэффициента трения.
Наиболее близким по технической сущности к заявляемому устройству является выбранное в качестве прототипа устройство для определения коэффициента трения (Мур Д. Основы и применение трибоники. - М.: Мир, 1978, с.295-297), содержащее нагрузочный элемент, измеритель силы трения, испытуемый образец, гибкое тело.
Это устройство имеет более широкие исследовательские возможности, но и здесь моделируется достаточно далекая от действительности схема взаимодействия гибкого тела с неподвижным образцом. Гибкое тело находится между слоем воды с одной стороны и масляной прослойкой - с противоположной. Эта сложная система позволяет поддерживать необходимый режим равномерного прижатия гибкого тела (ремня) к образцу. Однако в реальных условиях трения использование такого узкоспециализированного устройства не всегда оправдано и целесообразно из-за сложности и дороговизны конструкции, а также проблем с обслуживанием.
Задачей изобретения является разработка способа и устройства для определения коэффициента трения гибких тел, обеспечивающих повышение точности измерений и достоверности испытаний.
Способ определения коэффициента трения гибких тел, заключающийся в том, что пару трения приводят в контакт и осуществляют перемещение гибкого тела относительно контртела, фиксируют силу трения скольжения, реализуется тем, что контртело устанавливают на плавающую платформу, помещаемую в емкость с жидкостью, предварительно измерив ее исходный уровень h0, при последующем перемещении гибкого тела измеряют силу трения скольжения Fтр и уровень жидкости в динамическом режиме hд а коэффициент трения k определяют по формуле
 ,
,
где ρж - плотность жидкости; g - ускорение свободного падения;
Sж, Sп - общая площадь жидкости в емкости и площадь плавающей платформы соответственно.
Поставленная задача достигается тем, что устройство для определения коэффициента трения гибких тел, содержащее гибкое тело, контртело, систему измерения силы трения скольжения, снабжено емкостью с жидкостью, в которую помещена плавающая платформа с установленным на ней контртелом, на краях емкости расположены направляющие ролики, через которые протягивается гибкое тело, а плавающая платформа взаимодействует с датчиком системы измерения силы трения скольжения, причем емкость снабжена средством измерения уровня жидкости.
Размещение контртела на плавающей платформе (жидкостной опоре) обеспечивает практически безинерционную реакцию платформы на внешнее силовое воздействие как в осевом (касательном) - вдоль линии действия силы трения, так и нормальном направлении, т.е. в направлении действия нормальной контактной нагрузки, что значительно повышает точность измерений и достоверность испытаний. Это обусловлено тем, что силовое воздействие на датчик системы измерения силы трения фактически передается через жидкость, где трение между слоями пренебрежимо мало по сравнению с трением между твердыми телами, что в конечном итоге и повышает чувствительность системы и точность измерения.
На фиг.1 представлено устройство для определения коэффициента трения гибких тел.
Устройство содержит емкость с жидкостью 1, опорную плавающую платформу 2, установленное на ней неподвижно контртело 3, гибкое тело 4, направляющие ролики 5, датчик системы измерения силы трения скольжения 6, средство измерения уровня жидкости 7.
Способ осуществляется следующим образом.
Изначально в емкость заливают жидкость и измеряют ее начальный уровень h0.
Затем на платформе 2 неподвижно закрепляют контртело 3 и помещают их в емкость с жидкостью 1.
Гибкое тело пропускают через направляющие ролики 5 и приводят в контакт с контртелом 3. Контактную пару нагружают силой натяжения Q, обеспечивающей минимальный расчетный уровень предварительного натяжения гибкого тела 4, соответствующего рабочей нагрузке в статическом состоянии механизма.
Здесь перемещение гибкого тела и плавающей платформы в горизонтальном направлении отсутствует, сила трения Fтр=0. Силы натяжения Q, складываясь, дают силу нагрузки N, которая уравновешивается силой Архимеда A (статическая схема), при этом плавающая платформа 2 получает вертикальное перемещение. Это перемещение фиксируют по изменению уровня жидкости в емкости при статическом нагружении - hт. Это можно сделать с помощью любых известных средств измерения уровня либо определить (пересчитать) через вертикальное смещение платформы при нагружении силой Q.
Сила N, определяемая как результирующая сил Q, может быть рассчитана по формуле (фиг.2):

где α - угол наклона гибкого тела к горизонтали. Предполагается, что величина силы натяжения Q обеспечит существование угла α>0.

Силу A определяют по изменению уровня жидкости следующим образом.
Объем жидкости Vт, вытесненной платформой при статическом нагружении, равен:

где Sж, Sп - общая площадь жидкости в емкости и площадь плавающей платформы соответственно.
Тогда по закону Архимеда запишем

где ρж - плотность жидкости, g - ускорение свободного падения.
Далее с помощью внешнего привода плавно доводят скорость перемещения гибкого тела 4 по контртелу 3 от нуля до рабочего уровня и фиксируют значения силы трения скольжения - Fтр. При необходимости можно зафиксировать и изменение ее значения в процессе перехода к динамическому режиму (см. фиг.3): Fнп (неполная сила трения покоя) и Fп (сила трения покоя).
При этом расстояние между линией измерения силы трения и плоскостью трения (плоскость контакта гибкого тела и контртела) поддерживают минимальным.
В динамическом режиме под действием силы трения скольжения Fтр в зоне контакта гибкого тела и контртела плавающая платформа получает дополнительное смещение в вертикальном направлении (погружение в жидкость). Его значение фиксируют через уровень жидкости в динамическом режиме hд. Смещение компенсируется уравновешивающей силой Архимеда, которая равна A+ΔA, где ΔA - добавочная сила Архимеда, которая может быть определена следующим образом:

где VΔ - объем жидкости, вытесненной платформой в динамическом режиме испытаний, определяемый как

Очевидно, что коэффициент трения k можно определить по зависимости

Подставляя в зависимость (7) значения A из (4) и ΔA из (5), после преобразований и упрощений получим окончательное выражение для расчета коэффициента трения:

| название | год | авторы | номер документа |
|---|---|---|---|
| РЕГУЛЯТОР РАСХОДА ВОДЫ В НАПОРНОМ ТРУБОПРОВОДЕ | 2009 |
|
RU2392652C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА СУХОГО ТРЕНИЯ ФРИКЦИОННЫХ ПАР ПРИ БЫСТРО ОСЦИЛЛИРУЮЩИХ ПЕРЕМЕЩЕНИЯХ | 2012 |
|
RU2491531C1 |
| ПЛАВАЮЩЕЕ ПОКРЫТИЕ ДЛЯ РЕЗЕРВУАРА | 1997 |
|
RU2127216C1 |
| СПОСОБ ЭКСПЕРИМЕНТАЛЬНОГО ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКОГО КОЭФФИЦИЕНТА ВНЕШНЕГО ТРЕНИЯ | 2010 |
|
RU2444000C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЛОТНОСТИ, ВЯЗКОСТИ И СМАЗЫВАЮЩЕЙ СПОСОБНОСТИ ЖИДКИХ СРЕД | 1999 |
|
RU2196976C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКОГО КОЭФФИЦИЕНТА ВНЕШНЕГО ТРЕНИЯ МЕЖДУ ДВУМЯ ПОДВИЖНЫМИ ОБРАЗЦАМИ | 2013 |
|
RU2545073C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК ПРЕДЕЛЬНОГО СОСТОЯНИЯ СЫПУЧЕГО МАТЕРИАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2254564C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКОГО КОЭФФИЦИЕНТА ВНЕШНЕГО ТРЕНИЯ | 2015 |
|
RU2589955C1 |
| Способ определения силы схватывания металлических поверхностей при трении | 2017 |
|
RU2738598C2 |
| УСТРОЙСТВО АДАПТИВНОГО УПРАВЛЕНИЯ СМАЗОЧНЫМ ДЕЙСТВИЕМ | 2012 |
|
RU2493380C1 |


Изобретение относится к области экспериментальных методов механики деформируемого твердого тела и может быть использовано как средство для определения коэффициента трения гибких тел (нитей, лент, проволоки, канатов и т.п.). Способ определения коэффициента трения гибких тел, заключается в том, что пару трения приводят в контакт и осуществляют перемещение гибкого тела относительно контртела. Затем фиксируют силу трения скольжения. Причем контртело устанавливают на плавающую платформу, помещаемую в емкость с жидкостью, предварительно измерив ее исходный уровень h0. При последующем перемещении гибкого тела измеряют силу трения скольжения Fтр, и уровень жидкости в динамическом режиме hд. Коэффициент трения k определяют по формуле 
где ρж - плотность жидкости; g - ускорение свободного падения; Sж, Sп - общая площадь жидкости в емкости и площадь плавающей платформы соответственно. Техническим результатом изобретения является повышение точности измерений и достоверности испытаний. 2 н.п. ф-лы, 3 ил.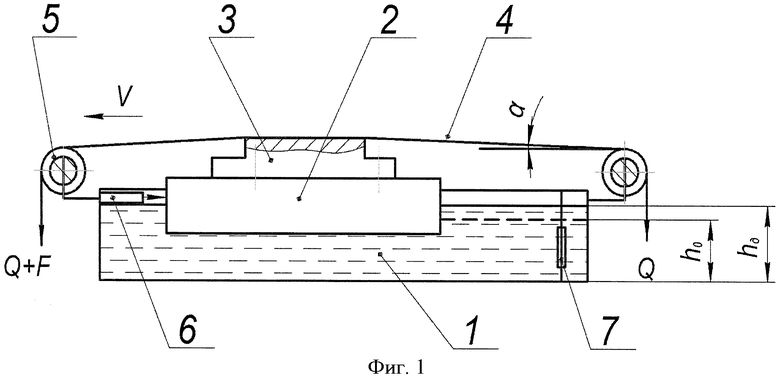
1. Способ определения коэффициента трения гибких тел, заключающийся в том, что пару трения приводят в контакт и осуществляют перемещение гибкого тела относительно контртела, фиксируют силу трения скольжения, отличающееся тем, что контртело устанавливают на плавающую платформу, помещаемую в емкость с жидкостью, предварительно измерив ее исходный уровень h0, при последующем перемещении гибкого тела измеряют силу трения скольжения Fmp, и уровень жидкости в динамическом режиме ha, a коэффициент трения k определяют по формуле

где ρж - плотность жидкости; g - ускорение свободного падения;
Sж, Sn - общая площадь жидкости в емкости и площадь плавающей платформы соответственно.
2. Устройство для определения коэффициента трения гибких тел, содержащее гибкое тело, контртело, систему измерения силы трения скольжения, отличающееся тем, что контртело размещено на плавающей платформе, помещенной в емкость с жидкостью, при этом на краях емкости расположены направляющие ролики, а плавающая платформа взаимодействует с датчиком системы измерения силы трения скольжения, причем емкость снабжена средством измерения смещений платформы под действием нормальной силы, а также средством измерения уровня жидкости.
| Мур Д | |||
| Основы и применение трибоники | |||
| - Мир, с.295-297, 1978 | |||
| Способ определения коэффициента трения скольжения | 1984 |
|
SU1396001A1 |
| CN 101710061 A, 19.05.2010 | |||
| Способ определения коэффициента трения скольжения твердых материалов | 1990 |
|
SU1763951A1 |
| Способ определения коэффициента трения водонасыщенного дисперсного пищевого продукта и устройство для его осуществления | 1988 |
|
SU1644027A1 |

