Способ относится к области измерительной техники и может быть использован для исследования физических и физико-химических свойств жидких сред в научной практике, нефтяной, химической, автотракторной, микробиологической, пищевой и других отраслях промышленности, в медицине для контроля и диагностики жидкостей различного назначения.
Известен способ измерения вязкости жидкости (см. патент 2080584, G 01 N 11/12, 1997 г.), заключающийся в том, что осуществляют разгон шарового зонда радиусом R и плотностью его материала ρз до обусловленной скорости движения, обеспечивают его свободное всплытие в жидкости по инерции, измерение в момент времени t координаты h, или скорости v, или ускорения dv/dt осуществляют на участке всплытия зонда и определяют постоянную времени Т экспоненты замедленного движения как решения соответствующего уравнения из следующих трех:
где v0 - значение скорости всплытия зонда в момент времени t0=0; hм - наибольшая высота всплытия зонда; tм - время достижения зондом точки траектории всплытия с высотой hм,
вязкость вычисляют по формуле:
η = (R2ρ)/(4,5T)
Данный способ обладает следующими недостатками: не позволяет проводить определение плотности.
Известен также способ определения плотности и вязкости жидкостей (см. патент 2084865, G 01 N 11/10, 9/08, 1997 г.), заключающийся в том, что осуществляют разгон шарового зонда радиусом R и плотностью его материала ρз до обусловленной скорости движения, направленной под углом к горизонту, обеспечивают его свободное всплытие до точки начала погружения без достижения поверхности жидкости с последующим погружением, измеряют времена ti достижения центром зонда обусловленных высот hi и времени ti обусловленных точек горизонтальной составляющей траектории движения 1j, после чего рассчитывают плотность жидкости по формуле:
где ρж - измеряемая плотность жидкости;
vj - начальное значение горизонтальной составляющей скорости движения зонда на j-ом участке горизонтальной составляющей траектории его движения;
vj+1 - конечное значение горизонтальной составляющей скорости движения зонда на j-ом участке горизонтальной составляющей траектории его движения;
vi - начальное значение вертикальной составляющей скорости всплытия зонда на i-ом участке вертикальной составляющей траектории его движения;
и
расчетные значения горизонтальной и вертикальной составляющих скоростей движения зонда на j-ом и i-ом участках соответственно;
g - ускорение свободного падения;
проходимые зондом горизонтальная и вертикальная составляющие движения зонда, а вязкость жидкости рассчитывается или по соотношению
или по соотношению
или как среднюю или среднеквадратичную величину по результатам двух расчетов.
Недостатками данного способа являются: возможность определения смазывающей способности жидкости, низкая точность определения вязкости и плотности жидкости из-за того, что зонд обладает конечными размерами и регистрация параметров движения его центра масс осуществляется с точностью до размеров зонда, а также то, что для проведения замеров необходим большой объем измеряемой жидкости.
Целью настоящего изобретения является повышение точности измерения ее плотности и вязкости, а также расширение функциональных возможностей способа путем обеспечения возможности определения смазывающей способности жидкости.
Поставленная цель достигается тем, что в способе, заключающемся в приведении в движение в жидкой среде тела массой m и объемом V движение тела осуществляют вверх и вниз внешней силой F, линейно связанной со скоростью движения тела, с разными скоростями, получают зависимость скорости vв движения тела вверх от силы
vв=kвF+bв
и скорости vн движения тела вниз от силы
vн=kнF+bн
где kн и kв - коэффициенты пропорциональности между скоростями движения тела вниз и вверх и внешней линейно связанной со скоростью движения тела силой F соответственно;
bн и bв - значения скоростей движения тела вниз и вверх при нулевом значении внешней линейно связанной со скоростью движения тела силы F соответственно;
плотность ρ жидкости определяют по формуле
где g - ускорение свободного падения,
сдвиговую вязкость ηs жидкости определяют по формуле
где  ,
,
где S - площадь поверхности тела, соприкасающаяся со сдвигаемыми слоями жидкости;
δ - толщина слоя жидкости, в пределах которого скорость движения сдвигаемых слоев изменяется от vв или vн до нуля,
при этом при движении вниз и вверх тело одновременно прижимают к поверхности с силой f, а смазывающую способность оценивают из отношения
или
где μ - коэффициент трения пары тело-поверхность в исследуемой жидкости,
μэ - коэффициент трения пары тело-поверхность в эталонной жидкости.
В предлагаемом способе повышение точности измерения плотности и вязкости достигается тем, что тело, погруженное в жидкость, приводят в движение вниз внешней линейно связанной со скоростью движения тела силой F, и уравнение движения этого тела в соответствии со вторым законом Ньютона будет:
maн = mg-FA-Fтр-F-Fη, (1)
где mg - сила тяжести;
FA = ρgV - сила Архимеда;
V - объем тела;
Fтр = μFпр - сила трения;
Fпp = kF•F + f,
kF - коэффициент пропорциональности, учитывающий горизонтальную составляющую внешней линейно связанной со скоростью движения тела силы F;
f - составляющая прижимной силы, не зависящая от внешней линейно связанной со скоростью движения тела силы F;
Fη = kηηv - сила вязкого трения.
η - сдвиговая вязкость жидкости;
v- скорость движения тела.
Перепишем уравнение (1):
maн = mg-ρgV-kηηvн-F-μf-μkFF (2)
Затем тело, погруженное в жидкость, приводят в движение вверх внешней линейно связанной со скоростью движения тела силой F, и уравнение движения этого тела в соответствии со вторым законом Ньютона будет:
maв = mg-ρgV+kηηvв-F+μf+μkFF (3)
При этом в обоих случаях обеспечивают участки равномерного движения тела, для которых ан=ав=0, при этом уравнения (2) и (3) движения тела будут иметь вид:
0 = mg-ρgV-kηηvн-F-μf-μkFF (4)
0 = mg-ρgV+kηηvв-F+μf+μkFF (5)
Откуда скорости движения тела вниз и вверх будут определяться по формулам:

Задавая разные значения внешней линейно связанной со скоростью движения тела силы F, приводят в движение тело вниз и вверх с разными скоростями:
vн = kнF + bн (8)
vв = kвF + bв (9)
где kн и kв - коэффициенты пропорциональности между скоростями движения тела вниз и вверх и внешней линейно связанной со скоростью движения тела силой F соответственно,
bн и bв - значения скоростей движения тела вниз и вверх при нулевом значении внешней линейно связанной со скоростью движения тела силы F соответственно.
Коэффициенты kн и kв определяют как тангенс углов наклона зависимостей (8) и (9), построенных по полученным значениям скоростей движения вниз и вверх, а bн и bв получают из пересечения прямых этих же зависимостей с осью скоростей.
Из попарного сравнения уравнений (6), (7) и (8), (9) следует:
После вычитания из (10) формулы (11):
После суммирования (10) и (11):
После суммирования (12) и (13):
После вычитания из (12) формулы (13):
Преобразовав (14) получим:
из (17) и (14):
из (15) и (14):
из (15) и (13):
Таким образом, вязкость ηs и плотность ρ определяются из уравнений (18) и (19) соответственно. А так как для определения этих параметров требуется измерение только скорости движения тела и внешней линейно связанной со скоростью движения тела силы F, то размеры и конфигурация тела не влияют на точность определения искомых параметров, в то время как в прототипе точность определения плотности ρ и вязкости η ограничивают размеры зонда, так как его координаты определяются с точностью до размеров зонда.
В предлагаемом способе расширение функциональных возможностей достигается за счет того, что при движении вниз и вверх тело одновременно прижимают к поверхности с силой f и производит определение коэффициента трения μ по формуле (20) или (21), а смазывающую способность исследуемой жидкости определяют по величине отношения  коэффициентов трения пары материалов "тело-поверхность" при наличии исследуемой жидкости в зазоре между ними и при наличии эталонной жидкости в зазоре между ними, где μэ - коэффициент трения пары тело-поверхность в эталонной жидкости. Если отношение
коэффициентов трения пары материалов "тело-поверхность" при наличии исследуемой жидкости в зазоре между ними и при наличии эталонной жидкости в зазоре между ними, где μэ - коэффициент трения пары тело-поверхность в эталонной жидкости. Если отношение  больше единицы, то смазывающая способность исследуемой жидкости хуже, чем у эталонной, если меньше единицы, то смазывающая способность исследуемой лучше, чем у эталонной. В то время как в прототипе смазывающую способность жидкости определить невозможно, так как движение зонда осуществляют в свободном объеме жидкости.
больше единицы, то смазывающая способность исследуемой жидкости хуже, чем у эталонной, если меньше единицы, то смазывающая способность исследуемой лучше, чем у эталонной. В то время как в прототипе смазывающую способность жидкости определить невозможно, так как движение зонда осуществляют в свободном объеме жидкости.
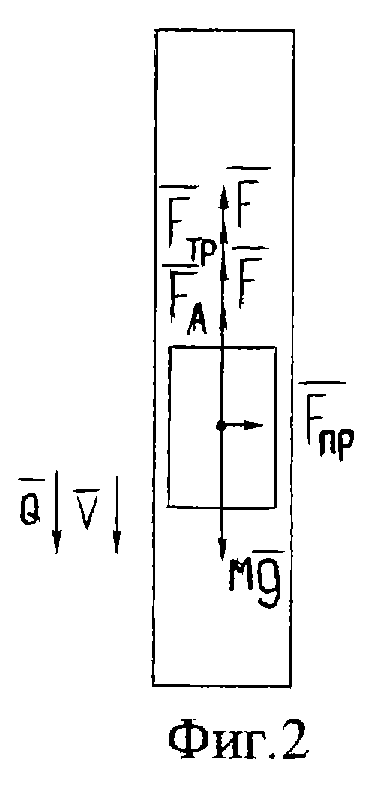
На фиг. 1 представлена схема устройства, реализующего предлагаемый способ. На фиг.2 представлено тело, погруженное в жидкость, с действующими на него силами при движении тела вниз. На фиг.3 представлено тело, погруженное в жидкость, с действующими на него силами при движении тела вверх. На фиг. 4 представлен график зависимости скорости движения тела в жидкости от внешней линейно связанной со скоростью движения тела силы F.
Устройство, реализующее предлагаемый способ (см. фиг.1), содержит цилиндр 1, заполненный исследуемой жидкостью, в которую помещен поршень 2, скользящий по поверхности цилиндра и подвешенный на нити, намотанной на шкив 3, который насажен на вал двигателя 4 со встроенным тахометром, с выходом которого связан индикатор 5 скорости движения поршня, и регулируемый источник питания 6, задающий вращающий момент вала двигателя.
Реализация предлагаемого способа осуществляется следующим образом. Регулируемым источником питания 6 задается вращающий момент M1 вала двигателя. Этот момент создает силу F1=M1/r (см. фиг.2), где r - радиус шкива, действующую на поршень 2, который под действием силы тяжести движется вниз со скоростью vн1 (см. фиг. 4), значение которой регистрируется индикатором 5 скорости движения поршня. После достижения поршнем 2 крайнего нижнего положения регулируемым источником питания 6 задается вращающий момент М2 вала двигателя. При этом поршень под действием силы F2=M2/r (см. фиг.3), приводится в движение вверх со скоростью Vв1 (см. фиг.4), значение которой регистрируется индикатором 5 скорости движения поршня. После достижения поршнем 2 крайнего верхнего положения регулируемым источником питания 6 задается вращающий момент М3 вала двигателя. Этот момент создает силу F3=М3/r (см. фиг. 2), где r - радиус шкива, действующую на поршень 2, который под действием силы тяжести поршень 2 вновь падает вниз со скоростью vн2 (см. фиг.4), значение которой регистрируется индикатором 5 скорости движения поршня. После достижения крайнего нижнего положения регулируемым источником питания 6 задается момент М4 вала двигателя, создающий силу F4=М4/r (см. фиг.3). При этом поршень под действием этой силы приводят в движение вверх со скоростью vв2 (см. фиг. 4), значение которой регистрируется индикатором 5 скорости движения поршня.
По полученным значениям силы F и соответствующим значениям скоростей движения поршня v строят графики зависимостей v=v(F), как показано на фиг.4, из которых определяют коэффициенты kн и kв, bн и bв. Затем по формулам (17)-(20) определяют соответственно плотность, сдвиговую вязкость и коэффициент трения, характеризующий смазывающую способность жидкости.


Использование: для исследования физических и физико-химических свойств жидких сред в научной практике, нефтяной, химической, автотракторной, микробиологической, пищевой и других отраслях промышленности, в медицине для контроля и диагностики жидкостей различного назначения. В способе тело массой m и объемом V приводят в движение вверх и вниз с разными скоростями внешней силой F со стороны нити, намотанной на шкив, который приводится во вращение двигателем со встроенным тахометром. Сила F линейно связана со скоростью движения тела. Далее получают зависимость скорости vв движения тела вверх от силы vв=kвF+bв и скорости vн движения тела вниз от силы vн=kнF+bн, определяемых по показаниям индикатора скорости движения поршня, где kн и kв - коэффициенты пропорциональности между скоростями движения тела вниз и вверх и внешней линейно связанной со скоростью движения тела силой F соответственно; bн и bв - значения скоростей движения тела вниз и вверх при нулевом значении внешней линейно связанной со скоростью движения тела силы F соответственно. По полученным значениям определяют плотность, вязкость и смазывающую способность. Технический результат: повышение точности измерения плотности и вязкости жидкости, а также расширение функциональных возможностей способа путем обеспечения возможности определения смазывающей способности жидкости. 4 ил.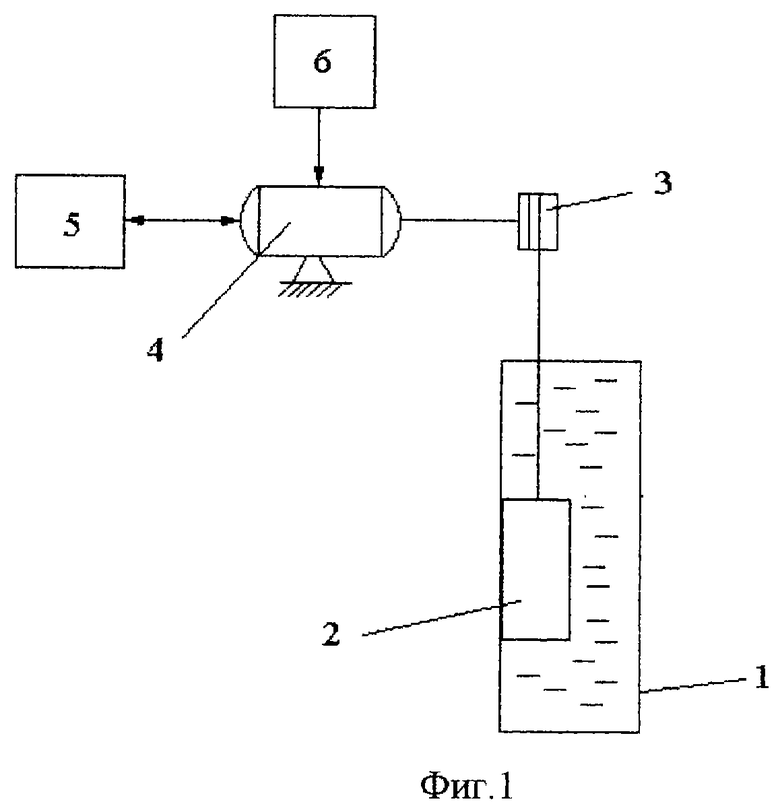
Способ определения плотности, вязкости и смазывающей способности жидких сред, заключающийся в том, что тело массой m и объемом V приводят в движение в жидкой среде, отличающийся тем, что движение тела осуществляют вверх и вниз внешней силой F, линейно связанной со скоростью движения тела, с разными скоростями, получают зависимость скорости vв движения тела вверх от силы
vв= kвF+bв,
и скорости vн движения тела вниз от силы
vн= kнF+bн,
где kн и kв - коэффициенты пропорциональности между скоростями движения тела вниз и вверх и внешней линейно связанной со скоростью движения тела силой F соответственно;
bн и bв - значения скоростей движения тела вниз и вверх при нулевом значении внешней линейно связанной со скоростью движения тела силы F соответственно,
плотность ρ жидкости определяют по формуле
где g ускорение свободного падения,
сдвиговую вязкость ηs жидкости определяют по формуле
где 
где S - площадь поверхности тела, соприкасающаяся со сдвигаемыми слоями жидкости;
δ - толщина слоя жидкости, в пределах которого скорость движения сдвигаемых слоев изменяется от vв или vн до нуля,
при этом при движении вниз и вверх тело одновременно прижимают к поверхности с силой f, а смазывающую способность оценивают из отношения
или
где μ - коэффициент трения пары тело - поверхность в исследуемой жидкости,
μэ - коэффициент трения пары тело - поверхность в эталонной жидкости.
| СПОСОБ ИЗМЕРЕНИЯ ВЯЗКОСТИ И ПЛОТНОСТИ ЖИДКОСТИ | 1994 |
|
RU2084865C1 |
| Способ определения плотности жидкостей | 1982 |
|
SU1100536A1 |
| МОДУЛЬ СИСТЕМЫ ТОПЛИВНЫХ ЭЛЕМЕНТОВ | 2008 |
|
RU2479468C2 |
| DE 1254888 А, 23.11.1967. | |||

