Способ и устройство измерения скорости относится к способам и устройствам, использующимся при навигации летательных аппаратов, при измерении ускорения и скорости.
Известны способ и устройство измерения скорости путем интегрирования ускорения, измеренного инерционной массой [1. Д.И.Агейкин, М.А.Балашов, С.П.Колосов и др. Руководство по проектированию элементов и систем автоматики. Вып.2 под. Ред. Б.Н.Петрова. Гос. Изд. Оборонпром., М., 1959, с.5-26].
Недостатком известного способа является наличие механических преобразователей с подвижными частями, малым ресурсом и точностью.
Известны способ и устройство измерения ускорения инерционной массой, содержащее э/двигатель диск, постоянный магнит, преобразователь недокомпенсации, ось, на которой суммируются моменты входной от ускорения и обратной связи [2. Г.Г.Раннев, А.П. Тарасенко. Методы и средства измерений. М., Издательский центр Академия, 2008. С.221]. Недостатки: наличие индукционного преобразователя, необходимость непосредственного доступа к валу, зависимость амплитуды выходного сигнала от измеряемой скорости вращения, что затрудняет измерение малых скоростей.
Известны способ и устройство измерения скорости с помощью интегрирующего акселерометра [3. Д.А.Браславский. Приборы и датчики летательных аппаратов. Изд. Машиностроение. М., 1970. С.354-357], принятого за прототип.
В известном способе применен способ интегрирования ускорения, измеряемого инерционной массой в виде маятника, в полном диапазоне ускорения, причем интегрирование ускорения происходит вне контура обратной связи с помощью электродвигателя, угол поворота которого является выходом устройства.
Недостатками известного способа и устройства являются небольшая точность измерения ускорения и преобразование его в скорость электродвигателем, наличие механических подвижных деталей в виде маятниковой группы с преобразователем угла поворота в электрический потенциал, механического преобразователя напряжения в момент обратной связи, а также непошаговое измерение ускорения во всем диапазоне. Отсутствие разбиения всего диапазона измерения на отдельные участки (шаги) не позволяет увеличить точность измерения, как бы изменить масштаб измерения на отдельных участках диапазона теми же деталями (элементами) измерения и той же точностью, что применяемые первоначально по всему диапазону измерения ускорения.
Кроме того, в известном способе измерение ведется аналоговым способом, без использования устройств с частотным выходом, что также снижает точность преобразования и измерения ускорения и перевод его значений в скорость объекта.
Целью изобретения является повышение точности измерения, используя отдельные участки изменения измеряемого параметра, т.е. измерение «приращений» измеряемого параметра с частотным преобразованием аналоговой величины, например давления, в частоту.
Для устранения указанных недостатков в известном способе предлагается способ измерения скорости движения тела, при котором ускорение инерционной массы преобразуют, усиливают и интегрируют, отличающийся тем, что весь диапазон измерения ускорения движения тела разделяют на отдельные участки, преобразуют ускорение в давление, выбирают участок в качестве нулевого (текущего) участка, на котором компенсируют аналоговой обратной связью силовое воздействие от ускорения, и значениями давления на этом текущем участке измеряют величины ускорения на других участках, для равновесия инерционной массы при приращении ускорения вводят или выводят для каждого участка дополнительную компенсацию обратной связью по командам верхнего и нижнего значений порогов давления, формируют код участка, преобразуют давление в частоту, суммируют импульсы на соответствующих участках, интегрируют, фиксируют величину скорости.
Для устранения указанных недостатков в известном устройстве предлагается устройство измерения скорости движения тела, содержащее инерционную массу, сумматор, усилитель мощности и интегратор, отличающееся тем, что введен струйный генератор частоты, подключенный к усилителю мощности, а выходом - к струйному счетчику частоты, введен реверсивный струйный счетчик участков приращения ускорения, подключенный выходами к струйным триггерам участков через свои элементы И и входами к струйным импульсаторам пороговых триггеров, введены по числу участков в диапазоне ускорения камеры обратной связи в сумматоре и клапаны включения этих камер, выходами подключенные к стабилизированному источнику давления и входами к струйным триггерам участков, выходы струйного счетчика частоты и реверсивного счетчика соединены с вычислителем.
Струйный генератор как выходной элемент, преобразующий аналоговый сигнал в частоту, имеет ограниченный линейный диапазон характеристики «давление-частота».
Процедура увеличения точности состоит в том, что этим ограниченным линейным (близком к линейному) диапазоном частоты измеряем не весь диапазон входных значений параметра - ускорения, а его отдельные участки. Т.е. как бы увеличиваем масштаб измерения участков по очереди, или рассматриваем отдельные участки входного сигнала под «микроскопным» увеличением с последовательным переключением.
Таким образом, входные участки имеют уменьшенный диапазон, а выходной частотный диапазон измерения ускорения устройства один и тот же для всех входных участков.
Например, в обычной схеме измерения весь входной диапазон ускорения Δj=10g, a весь выходной диапазон частоты струйного генератора Δf=1000 Гц. Тогда в линейной шкале ошибка на 1 импульс будет составлять 10/1000=1%.
В предложенном способе измерения входной диапазон ускорения делится, например, на 10 участков, т.е. Δj=1g и выходной диапазон частоты тот же Δf=1000 Гц. При этом ошибка на 1 импульс будет составлять 1/1000=0,1%. Следовательно, в данном примере, применяя предложенный способ измерения, получим уменьшение погрешности измерения в 10 раз.
Введение дополнительного, кроме обычного, источника пневмопитания Рстаб с характеристиками более жесткого поддержания давления, его температурной стабилизации и настройки на некоторое значение давления, связанное с ускорением земного притяжения для областей проложенного маршрута движения объекта, позволяет определять его скорость движения с меньшей погрешностью.
На чертеже представлена схема устройства измерения скорости объекта (интегрирующего акселерометра), реализующего предлагаемый способ на пневматических элементах. Функциональные пневматические устройства обозначены: 1 - чувствительный блок, включающий мембранный сумматор и преобразователь перемещения в давление; 2 - инерционная масса; 3 - блок предварения с усилителем мощности; 4 - струйный генератор (СГ), преобразующий аналоговый сигнал в частоту; 5 - счетчик импульсов для всех участков измерения входного параметра; 6-1, 6-2, 6-3 - струйные триггеры включения дискретных клапанов 9-1, 9-2 и 9-3 первого, второго и третьего участков измерения; 7-1 - струйный пороговый элемент (реле) по превышению давления на границе участка; 7-11 - импульсатор включения участков; 7-2 - струйный пороговый элемент (реле) уменьшения давления на границе участка; 7-21 - импульсатор выключения участков; 8-12, 8-22, 8-33, 8-34 - струйные элементы «И» первого, второго и третьего участков, фиксирующие изменение в «+» кода участка включением триггеров 6-1, 6-2, 6-3; 8-11, 8-21, 8-31, 8-32 - струйные элементы «И» первого, второго и третьего участков, фиксирующие изменение в «-» кода участка выключением триггеров 6-1, 6-2, 6-3; 9-1, 9-2, 9-3 - дискретные клапаны включения стабилизированного источника питания Рстаб; 10 - реверсивный счетчик-указатель кода участка измерения; 11 - вычислитель скорости.
Чувствительный блок 1 представляет собой сумматор с преобразователем перемещения в давление в виде много мембранного элемента сравнения с дифференциальными соплами и инерционной массой 2, укрепленной на общем штоке, связывающим мембраны, с числом камер, равным числу участков измерения для силовой компенсации инерционной силы ускорения по участкам. В блоке 1 выход камеры, в которой расположено сопло питания, и выход камеры, в которой расположено сопло с выходом в атмосферу, соединены между собой и с входом блока предварения 3. Перемещение X инерционной массы 2 относительно корпуса блока является мерой действующего ускорения j на чувствительный блок 1 в данный момент времени и выражено формулой Х=k1j для некоторого значения времени t, а давление выхода блока 1 связано с перемещением P1=k2X. Отсюда P1=k2k1j. Усилие разделительных элементов мембранного бока 1, возникающие при перемещении инерционной массы 2, принимается малой величиной, входящей в погрешность измерения.
Блок предварения 3 с усилителем мощности, например трехмембранный элемент сравнения с дифференциальными соплами с пневмоповторителем. Выходное давление блока 3 равно Р3=P1+Tn(dP1/dt) или Р3=k2k1j+Tn(dj/dt).
Выход усилителя мощности (пневмоповторителя) поступает одновременно в камеру обратной связи участка 0, к струйному генератору 10 и к струйным элементам верхнего 7-1 и нижнего 7-2 порога давления, одинаковых для всех участков измерения ускорения.
Принимая в ограниченном диапазоне частот линеаризованную зависимость вида Q4~k4P3, можно считать, что частота и расход в струйном генераторе связаны между собой зависимостью f=kjQ4. Частотный выход СГ в виде импульсов давления передается на счетчик 5 в виде F5i=k5fi, где i - номер участка, и далее - вычислителю 11. Реверсивный счетчик (указатель кода) 10 для участка, на котором ведется измерение ускорения, согласует работу вычислителя для счета по участкам и получает команду передачи кода участка при включении/переключении от струйных элементов 7-1, 7-2 в ту или другую сторону (увеличении или уменьшении) ускорения j на величину, например 1g.
Струйный счетчик 11 пневматических импульсов давления подсчитывает их количество по формуле  и передает его вычислителю, который в течение некоторого заданного времени определяет скорость объекта. Струйный счетчик выполнен, например, в двоичном коде.
и передает его вычислителю, который в течение некоторого заданного времени определяет скорость объекта. Струйный счетчик выполнен, например, в двоичном коде.
В предлагаемом способе для повышения чувствительности по частоте f весь диапазон измеряемого ускорения делится несколькими участками, крайние значения которых будут соответствовать минимальному и максимальному значению по частоте f. Весь диапазон изменения ускорения можно разделить на любые по величине участки и любое количество, т.е. увеличить точность измерения в наиболее интересующих значимых изменениях ускорения j. В предлагаемом устройстве введены пневматические элементы для каждого участка измерения.
Функциональные элементы 1, 2, 3 входят в контур, в котором от входного ускорения j изменяется давление Р3 для его силовой компенсации с прибавлением скоростной обратной связи от блока 3 для большей помехоустойчивости при изменении знака приращения по ускорению j.
Триггеры 6-1, 6-2 только переключают расположение дискретных клапанов 9-1, 9-2 и положение мембранного блока между дифференциальными соплами чувствительного блока 1 при увеличении ускорения j и при его уменьшении в ту или другую сторону, т.е. сдвигают условный нуль «0» отсчета измерения j.
Работает устройство измерения скорости следующим образом (см. чертеж).
Давление питания Pn подано в прибор и действует ускорение j на инерционную массу М. Давлением Р3 запитан струйный генератор 10, который вырабатывает частотный сигнал f, пропорциональный расходу Q4, протекающему через его сопло питания. Частотные импульсы откладываются в счетчик 5 на участке 0…1g, если весь диапазон измерения разделен, например, по 1g на участок.
Частота f, вырабатываемая струйным генератором 5, является одним из выходных сигналов устройства и прямо пропорциональна измеряемому ускорению j, поскольку
f=kjQ4=k1k2k4kfj или f=k7j, при этом k7=k1k2k4kf.
Выбирают нулевой участок измерения ускорения j, например, в пределах 0…1g. Этот участок является начальным и текущим участком, в котором каждый раз начинается измерение ускорения при его увеличении (уменьшении) на 1g при сдвиге условного нуля «0». Т.е. фактически значениями давлений этого участка сканируется приращение ускорения по всему диапазону от начала до конца после его каждого увеличения или уменьшения, когда величина ускорения проходит через границы участков максимального и минимального значений между нулевым и первым, первым и вторым, вторым и третьим и далее. Также значениями давления текущего участка измеряются величины ускорения возможного обратного хода при уменьшении абсолютной величины ускорения.
После чувствительного блока 1 формируется давление P1, пропорциональное ускорению j инерционной массы 2, укрепленной на мембранном блоке. Блок предварения 3 формирует сигнал давления, пропорциональный ускорению и его производной Р3. Далее сигнал давления Р3 поступает в камеру обратной связи сумматора 1, обеспечивая отрицательную обратную связь, для равновесия мембранного блока 2. Одновременно давление Р3 поступает в струйный генератор 10 для выработки пневматических импульсов и на вход дискретных реле 7-1 и 7-2. Струйные пневмоэлементы - реле и триггеры - находятся в положении «1» (см. чертеж).
По мере нарастания ускорения увеличивается частота f, вырабатываемая струйным генератором 4, и давление Р3 изменяется в пределах, например 0,1…1,0 атм, соответствующая изменению ускорения j=0…1g. При ускорении j=1g инерционная масса М развивает усилие такой величины, что мембранный блок перемещается на положенное максимально отодвинутое расстояние от сопла питания. Для измерения следующего по величине приращения ускорения мембранный блок 1 следует сместить в прежнее начальное положение, одновременно изменить точку отсчета и зафиксировать условный ноль «0» для измерения ускорения j в новом положении.
На этом этапе проходят действия, определяемые предложенным способом, когда весь диапазон измерения ускорения делят на отдельные участки, преобразуют ускорение в давление, выбирают участок по размеру диапазона в качестве нулевого (текущего) участка, на котором компенсируют аналоговой обратной связью силовое воздействие от ускорения, и значениями давления этого текущего участка измеряют остальные участки, для равновесия инерционной массы при приращении ускорения вводят или выводят для каждого участка дополнительную компенсацию обратной связью в сумматор по командам пороговых датчиков давления, преобразуют давление в частоту, которую передают на счетчик от любого участка, формируют код участка, суммируют импульсы на соответствующих участках, интегрируют, фиксируя, величину скорости.
Давление Р3 проходит в струйный генератор 4, который вырабатывает импульсы давления для счетчика 5. При переходе на другой участок измерения по команде вычислителя 11, определяемой реверсивным счетчиком-указателем кодов 10, набранное число импульсов сбрасывается вычислителю 11 и на счетчике 5 устанавливается начальное число.
Частота следования импульсов струйного генератора 4 минимальна в начале нулевого участка и максимальна в конце нулевого участка. Число импульсов  счетчика 5, построенного на струйных триггерах, например, в двоичном коде передается вычислителю 11. Число N0 отражает скорость объекта, передвигающегося с ускорением j≤1g на отрезке времени 0…t1. При ускорении
счетчика 5, построенного на струйных триггерах, например, в двоичном коде передается вычислителю 11. Число N0 отражает скорость объекта, передвигающегося с ускорением j≤1g на отрезке времени 0…t1. При ускорении
 выходная частота f струйного генератора 4 имеет максимальное значение и осуществляется переход на первый участок измерения.
выходная частота f струйного генератора 4 имеет максимальное значение и осуществляется переход на первый участок измерения.
На первом участке измерения ускорение j=1…2g ведется тем же нулевым текущим участком. Все участки измерения «как бы» перебираются для измерения текущим участком, а в разные соответствующие своим участкам компенсационные камеры чувствительного блока 1 подается только давление для равновесия мембранного блока между двух дифференциальных сопел питания и слива. При разных значениях ускорения и его инерционной силы, действующей на массу М мембранного блока 1, в предложенном устройстве требуется сложение компенсационных сил в разных камерах отрицательной обратной связи.
Измерение на первом участке снова начинается с минимальной частоты ƒ СГ 4. В мембранном блоке заслонка элемента «сопло-заслонка», камера которого связана с атмосферой, находится на максимальном удалении от сопла слива и на минимальном удалении от сопла питания находится заслонка другой пары «сопло-заслонка». В это время через СГ проходит минимально возможный расход Q4, одинаковый для всех участков измерения.
При увеличении ускорения j>1g увеличивается давление Р3, одновременно вырабатывается СГ пневмоимпульсы, которые передаются на счетчик 5. Два струйных пороговых реле 7-1 и 7-2 определяют коридор (0,09…1,0 атм) изменения давления P3 (0,1…1,0 атм). При давлении Р3>1,0 атм реле 7-1 переключается в новое устойчивое верхнее положение (см. чертеж). Сформированный сигнал от реле 7-1 после импульсатора 7-11 поступает в следующих направлениях: 1) на изменение кода в «+» реверсивного счетчика-указателя кода 10 при увеличении ускорения при зачете импульсов счетчика 5 с другим весом для вычислителя 11, т.е. знак 20=0 меняется на 20=1; 2) переключает струю питания струйного триггера 6-1 в верхнее положение; 3) далее по этой команде открывается дискретный клапан 9-1 и пропускает давление Pстаб=1 атм=const от стабилизированного источника, которое поступает в камеру обратной связи мембранного блока 1 первого участка измерения и обозначает сдвиг условного нуля «0» измерения ускорения j.
Давление Р3 минимально и равно 0,1 атм, т.к. осуществлена перестановка мембранного блока в первоначальное положение для начала работы текущего участка уже в пределах измерения ускорения j=1…2g, т.е. произошел сдвиг условного нуля «0» для измерения ускорения на первом участке. Импульсы поступают от счетчика 5 и передаются вычислителю 11 с другим весом на первом участке. Также учитывается вес на втором, третьем и т.д. участках измерения приращения ускорения j.
С этого положения мембранного блока начинается измерение ускорения на первом участке 1…2g. Однако при неожиданном уменьшении ускорения менее 1g необходимо вернуться на нулевой участок измерения 0…1g.
Переменное давление Р3, зависящее от входного ускорения j, может меняться в любую сторону, при этом изменяется положение общего штока мембранного элемента с инерционной массой М относительно дифференциальных сопел, сопла питания и сопла слива (сопла связи с атмосферой). Причем это может происходить на любом участке измерения всего диапазона ускорения j.
Частота следования импульсов струйного генератора 4 минимальна в начале участка 1 и максимальна в конце. Число импульсов определяется счетчиком 5, построенного на струйных триггерах, например, в двоичном коде, и передается вычислителю 11 с кодом первого участка за некоторое время. Число
 отражает скорость объекта, передвигающегося с ускорением 1g≤j≤2g на отрезке времени t1…t2.
отражает скорость объекта, передвигающегося с ускорением 1g≤j≤2g на отрезке времени t1…t2.
Когда давление будет Р3>1,0 атм, то это означает, что измерение ускорения j на первом участке закончилось и измерение должно автоматически продолжиться на втором участке.
На этом этапе проходят действия, определяемые предложенным способом, когда в разделенном диапазоне измерения ускорения на отдельные участки компенсируют силовое воздействие от ускорения на первом участке аналоговой обратной связью нулевого участка и дополнительной компенсацией от источника стабилизированного давления по достижению назначенной величины приращения ускорения в виде давления, преобразовывают давление в частоту, интегрируют количество пневмоимпульсов за определенный промежуток времени и вычисляют скорость на первом участке.
Рассмотрим процедуру возврата измерения с первого участка на нулевой - текущий участок измерения ускорения.
Ускорение j>1g уменьшается и давление становится Р3<0,09 атм. Струя питания струйного реле 7-2 переключается в нижнее положение. Под действием импульсатора 7-21 происходит несколько автоматических переключений: 1) подан сигнал со знаком минус «-» в счетчик - указатель кода 10 для счета импульсов, поступающих от счетчика 5 в вычислитель 11 с прежним весом импульсов, соответствующих участку измерения 0…1g; 2) возвращается струя питания в положение «1» струйного триггера 6-1 после получения сигнала от струйного элемента И и двух сигналов-импульса 7-21 и  от реверсивного счетчика 10; 3) клапан 9-1 закрывает доступ давления Рстаб от стабилизированного источника питания к камере обратной связи первого участка. После этого измерение ускорения полностью переходит на нулевой (текущий) участок.
от реверсивного счетчика 10; 3) клапан 9-1 закрывает доступ давления Рстаб от стабилизированного источника питания к камере обратной связи первого участка. После этого измерение ускорения полностью переходит на нулевой (текущий) участок.
При продолжении падения ускорения по величине уменьшается давление Р3, которое компенсирует это изменение силового воздействия ускорения на инерционную массу в камере обратной связи текущего участка мембранного блока 1 и фиксацией числа импульсов на счетчике 5. Измерение продолжается до величины ускорения, равной j=0. При ускорении j<0 давление Р3 минимально, т.к. мембранный блок 2 находится на упоре у сопла питания.
При увеличении ускорения j>0 опять начинает возрастать давление Р3 и измерение продолжается текущим участком в пределах 0…1g.
Далее, если увеличивается ускорение j и Р3>1,0, струйный элемент 7-1 переключается и струя питания занимает верхнее положение (переключается «0» на «1»). Это момент вступления в работу измерительного участка 1. Отработав на первом участке, измерение начинается на втором. Струйный триггер 6-1 не переключается, т.е. струя питания не меняет своего положения, клапан 9-1 остается открытым и давление Рстаб подается в камеру обратной связи 1 участка.
Второй участок измерения ускорения j в пределах 2g…3g
В начале второго участка при j≥2g частота ƒ струйного генератора 4 и давление Р3 также имеют минимальное значение. При j=3g частота ƒ СГ максимальна.
Положение струи в триггере 6-1 продолжает оставаться в переключенном верхнем положении (см. чертеж) для компенсации воздействия ускорения j на участке до 2g.
После выработки импульса элементом 7-1 происходят переключения в следующих пневмоэлементах: 1) включается реверсивный счетчик - указатель кода 10 участков для участка 2, на котором вырабатывается сигнал 21=1, и передается вычислителю 11 и струйному И элементу 8-22; 2) подается импульс на струйный И элемент 8-22; 3) дискретный элемент 6-2 переключается - положение «0» меняется на «1»; 4) открывается клапан 9-2 и давление Рстаб проходит в камеру обратной связи участка 2 мембранного блока 1 для компенсации возросшего ускорения j. Если ранее при j>1g необходимо было обратной связью компенсировать силу, равную до 2Mg, то в конце второго участка измерения ускорения сила компенсации должна быть до 3Mg.
Между крайними значениями ускорения 2…3g на участке 2 обратная силовая связь вырабатывается работой участка 0. После срабатывания триггера 6-2 и за ним клапана 9-2 на мембранном блоке 1 уже суммируется к имеющейся ранее силе дополнительная сила по противодействию j на втором участке. Поскольку в дополнительную камеру обратной связи подано максимальное давление от источника стабилизированного питания Рстаб=1 атм, соответствующее концу второго участка измерения, то частота f изменила свое значение с max на min и соответствует  . Т.к. инерционная масса М вместе с мембранным блоком вернулась в исходное состояние (положение) по перемещению, то и вслед за этим давление P3 имеет минимальное значение. При ускорении j=3g выходная частота f струйного генератора 10 имеет максимальное значение.
. Т.к. инерционная масса М вместе с мембранным блоком вернулась в исходное состояние (положение) по перемещению, то и вслед за этим давление P3 имеет минимальное значение. При ускорении j=3g выходная частота f струйного генератора 10 имеет максимальное значение.
При увеличении ускорения j>2g увеличивается давления Р3, что приводит к увеличению частоты f струйного генератора 4 вследствие перемещения Х мембранного блока с инерционной массой 2 к атмосферному соплу. Перемещение Х мембранного блока в исходное (первоначальное) положение происходит благодаря срабатыванию триггера 6-2. Триггер 6-1 не изменяет своего состояния после переключения.
Число импульсов счетчика 11 с кодом второго участка показывает скорость движения объекта на втором участке при 2g<j<3g в течение некоторого времени t2…t3.
Сумма числа импульсов, накопленная вычислителем 11 по участкам η=ΣNi, где i - порядковый номер измерительного участка, выражает скорость объекта в конце i-го участка, в данном примере - в конце второго.
Третий участок измерения ускорения j в пределах 3g…4g
В начале третьего участка при j≥3g частота f струйного генератора 4 и давление Р3 также имеют минимальное значение.
Положение струи в триггерах 6-1, 6-2 продолжает оставаться в переключенном верхнем положении (см. чертеж) для компенсации воздействия ускорения j на участке до 3g.
После выработки импульса элементом 7-1 происходят переключения в следующих пневмоэлементах: 1) включается реверсивный счетчик - указатель кода 10 участков для участка 3, на котором вырабатываются сигналы 20=1, 21=1, и передаются вычислителю 11 и струйному И элементу 8-34; 2) подается импульс на струйный И элемент 8-33 и вместе с импульсом струйного И элемента 8-34 вырабатывается сигнал для переключения струйного триггера 6-3 - положение «0» меняется на «1»; 3) открывается клапан 9-2 и давление Рстаб проходит в камеру обратной связи участка 3 мембранного блока 1 для компенсации возросшего ускорения j. Если ранее при j>2g необходимо было обратной связью компенсировать силу, равную до 3Mg, то в конце третьего участка измерения ускорения сила компенсации должна быть до 4Mg.
После подачи давления Рстаб в камеру обратной связи блока 1 давление Р3 и частота СГ получают минимальные значения и текущий участок вновь отрабатывает возрастающее ускорение и пропорциональное ему давление частотой струйного генератора 4.
При дальнейшем увеличении ускорения мембранный блок 2 устанавливается на упор сопла слива, при котором давление Р3 и частота СГ максимальны и не меняются.
При уменьшении ускорения j на третьем участке (возможно до 3g) инерционная масса М перемещается к соплу питания чувствительного блока 1 и уменьшается давление Р3 после усилителя мощности 3 до «min» значения, например Р3<0,09 атм. Реле 7-2 посылает сигнал через импульсатор 7-21 в нескольких направлениях: 1) в реверсивный счетчик-указатель кода 10 для получения знака  и
и  в струйный И элемент 8-32, выход которого вместе с импульсом 7-21 переключает триггер 6-3 на закрытие клапана 9-2 и отключение Рстаб от камеры обратной связи сумматора 1 и восстановления отсчета условного «0» для ускорения j второго участка. Далее измерение ускорения происходит на участке 2.
в струйный И элемент 8-32, выход которого вместе с импульсом 7-21 переключает триггер 6-3 на закрытие клапана 9-2 и отключение Рстаб от камеры обратной связи сумматора 1 и восстановления отсчета условного «0» для ускорения j второго участка. Далее измерение ускорения происходит на участке 2.
При уменьшении величины ускорения повторяется процесс переключения триггеров и реле участка 2 и 1 для процедуры измерения на нулевом (текущем) участке подобно переходу от второго участка к первому, описанному ранее.
Если вновь увеличивается ускорение j более 1 g, переключение пневмоэлементов происходит по схеме, описанной в начале работы предложенного устройства.
На этом этапе проходят действия, определяемые предложенным способом, когда в разделенном диапазоне измерения ускорения на отдельные участки компенсируют силовое воздействие от ускорения на втором и третьем участках аналоговой обратной связью, значениями давления текущего участка измеряют ускорение на втором и третьем участках, преобразуют давление в частоту, интегрируют количество пневмоимпульсов за определенный промежуток времени и вычисляют скорость на втором и третьем участках.
В данном примере устройства число участков измерения всего диапазона ускорения j равно четырем, включая нулевой. Если число участков >3, то необходимо в схему, приведенную на чертеже, добавить струйные функциональные элементы, аналогичные участку 3, дополнительные камеры в чувствительный блок 1 и разряды в реверсивный счетчик 10.
Предложенные признаки - деление на участки всего измерительного диапазона ускорения, введение дополнительного источника стабилизированного питания, значениями давления текущего участка, выбранного по ограниченному размеру ускорения, измеряют ускорение остальных участков, использование частотной характеристики струйного генератора, реализация на пневмоэлементах - все это позволяет получить устройство для измерения скорости в цифровой форме с меньшей погрешностью измерения ускорения и более надежным.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПНЕВМАТИЧЕСКОГО ПРЕОБРАЗОВАНИЯ УСКОРЕНИЯ ДВИЖЕНИЯ ТЕЛА В СКОРОСТЬ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2421734C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ И ПНЕВМАТИЧЕСКИЙ СКОРОСТЕМЕР ДЛЯ ТЕЛА | 2010 |
|
RU2421733C1 |
| СЧЕТЧИК-РАСХОДОМЕР ГАЗА | 2011 |
|
RU2492426C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ЛИНЕЙНОГО ДВИЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1995 |
|
RU2089918C1 |
| РАСХОДОМЕР ГАЗА | 2009 |
|
RU2396516C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1996 |
|
RU2100594C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА ОПЕРЕЖЕНИЯ ВПРЫСКА ТОПЛИВА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2543091C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОБЪЕМНОГО РАСХОДА ЖИДКОСТИ | 1991 |
|
RU2012848C1 |
| ТЕРМОИНВАРИАНТНЫЙ ИЗМЕРИТЕЛЬ ЛИНЕЙНОГО УСКОРЕНИЯ | 2012 |
|
RU2528119C2 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ | 1992 |
|
RU2072548C1 |
Изобретение относится к способам и устройствам, использующимся при навигации летательных аппаратов, при измерении их ускорения и скорости. Способ измерения скорости движения тела заключается в том, что весь диапазон измерения ускорения движения тела разделяют на отдельные участки и преобразуют ускорение в давление. Затем выбирают участок в качестве нулевого (текущего) участка, на котором компенсируют аналоговой обратной связью силовое воздействие от ускорения. Значениями давления на этом текущем участке измеряют величины ускорения на других участках, для равновесия инерционной массы при приращении ускорения вводят или выводят для каждого участка дополнительную компенсацию обратной связью по командам верхнего и нижнего значений порогов давления, формируют код участка. Преобразуют давление в частоту, суммируют импульсы на соответствующих участках, интегрируют, фиксируют величину скорости. Устройство измерения скорости движения тела содержит чувствительный блок, выполненный в виде мембранного сумматора с дифференциальными соплами и инерционной массой, усилитель мощности, вход которого соединен с выходами мембранного сумматора. В устройство дополнительно введен струйный генератор частоты, подключенный к усилителю мощности, а выходом - к струйному счетчику частоты. Также введен реверсивный струйный счетчик участков приращения ускорения, подключенный выходами к струйным триггерам участков через свои элементы И и входами к струйным импульсаторам пороговых триггеров. В устройство введены по числу участков в диапазоне ускорения камеры обратной связи в сумматоре и клапаны включения этих камер, выходами подключенные к стабилизированному источнику давления и входами к струйным триггерам участков, выходы струйного счетчика частоты и реверсивного счетчика соединены с вычислителем. Технический результат - повышение точности измерения скорости движения тела. 2 н.п. ф-лы, 1 ил.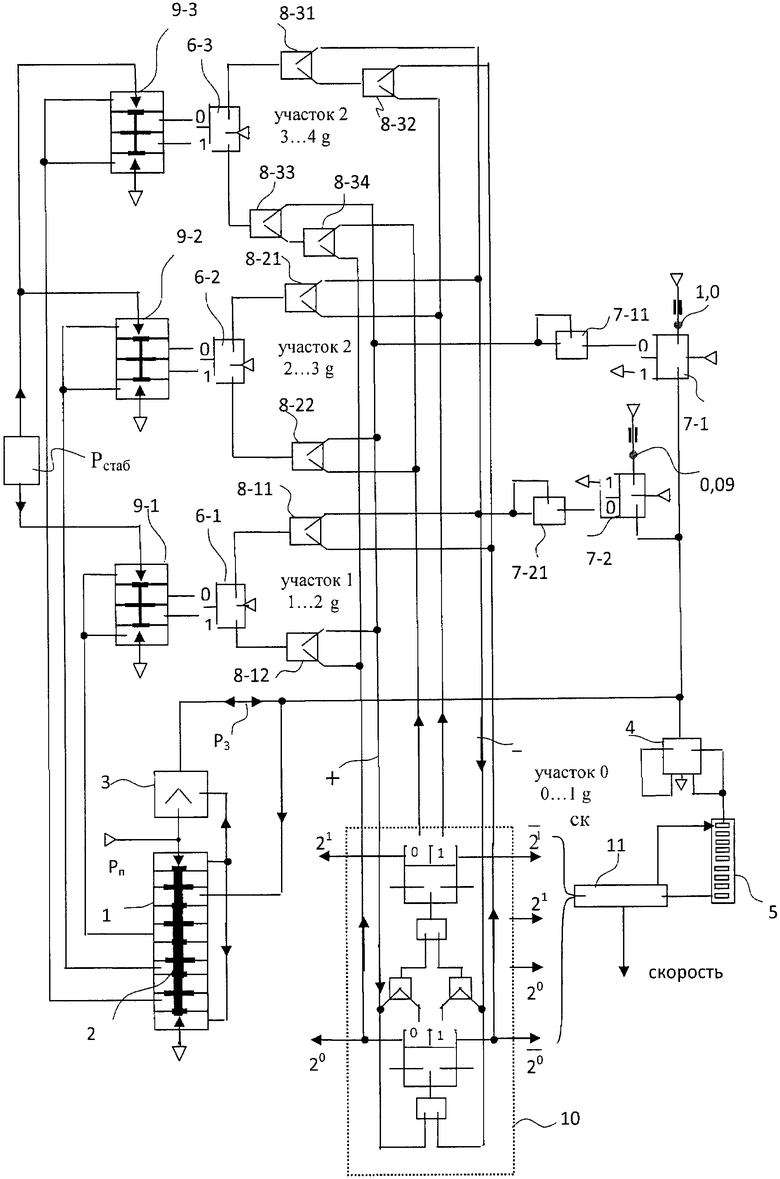
1. Способ измерения скорости движения тела, при котором ускорение инерционной массы преобразуют, усиливают и интегрируют, отличающийся тем, что весь диапазон измерения ускорения движения тела разделяют на отдельные участки, преобразуют ускорение в давление, выбирают участок в качестве нулевого (текущего) участка, на котором компенсируют аналоговой обратной связью силовое воздействие от ускорения, и значениями давления на этом текущем участке измеряют величины ускорения на других участках, для равновесия инерционной массы при приращении ускорения вводят или выводят для каждого участка дополнительную компенсацию обратной связью по командам верхнего и нижнего значений порогов давления, формируют код участка, преобразуют давление в частоту, суммируют импульсы на соответствующих участках, интегрируют, фиксируют величину скорости.
2. Устройство измерения скорости движения тела, содержащее чувствительный блок, выполненный в виде мембранного сумматора с дифференциальными соплами и инерционной массой, укрепленной на общем штоке мембраны, усилитель мощности, вход которого соединен с выходами мембранного сумматора, и вычислитель, выполненный с возможностью определения скорости объекта в течение периода времени на заданном участке, отличающееся тем, что введен струйный генератор частоты, подключенный к усилителю мощности, а выходом к струйному счетчику частоты введен реверсивный струйный счетчик участков приращения ускорения, подключенный выходами к струйным триггерам участков через свои элементы И и входами к струйным импульсаторам пороговых триггеров, введены по числу участков в диапазоне ускорения камеры обратной связи в сумматоре и клапаны включения этих камер, выходами подключенные к стабилизированному источнику давления и входами к струйным триггерам участков, выходы струйного счетчика частоты и реверсивного счетчика соединены с вычислителем.
| РАННЕВ Г.Г., ТАРАСЕНКО А.П | |||
| МЕТОДЫ И СРЕДСТВА ИЗМЕРЕНИЙ | |||
| - М.: ИЗДАТЕЛЬСКИЙ ЦЕНТР АКАДЕМИЯ, 2008 | |||
| Устройство для измерения скорости | 1989 |
|
SU1695235A1 |
| US 3597598 A, 03.08.1971 | |||
| CN 1482466 A, 17.03.2004 | |||
| GB 244330 A, 17.12.1925. | |||

