Способ и устройство пневматического преобразования ускорения в скорость объекта относится к устройствам, использующимся при навигации летательных аппаратов, при измерении ускорения и скорости.
Известны способ и устройство измерения скорости объекта путем интегрирования ускорения, измеренного инерционной массой [Д.И.Агейкин, М.А.Балашов, С.П.Колосов и др. Руководство по проектированию элементов и систем автоматики. Вып.2 под ред. Б.Н.Петрова. М.: Гос. Изд. Оборонпром. 1959, с.5-26].
Недостатком известного способа является наличие механических преобразователей с подвижными частями, малым ресурсом и точностью.
Известны способ и устройство измерения ускорения инерционной массы, содержащее э/двигатель с диском и постоянным магнитом, преобразователь недокомпенсации, ось вращения, на которой суммируются моменты входной от ускорения и обратной связи [Г.Г.Раннев, А.П.Тарасенко. Методы и средства измерений. М.: Издательский центр Академия. 2008. С.221]. Недостатки: наличие индукционного преобразователя, необходимость непосредственного доступа к валу, зависимость амплитуды выходного сигнала от измеряемой скорости вращения, что затрудняет измерение малых скоростей.
Известны способ и устройство измерения скорости с помощью интегрирующего акселерометра [Д.А.Браславский. Приборы и датчики летательных аппаратов. М.: Машиностроение. 1970. С.354-357], принятого за прототип.
В известном способе применен способ интегрирования ускорения, измеряемого инерционной массой в виде маятника, во всем диапазоне ускорения, причем интегрирование ускорения происходит вне контура обратной связи с помощью э/двигателя, угол поворота которого является выходом устройства.
Недостатками известного способа являются небольшая точность измерения ускорения и преобразование его в скорость с помощью э/двигателя, наличие механических подвижных деталей маятниковой группы с преобразователем угла поворота в электрический потенциал, механического преобразователя напряжения в момент обратной связи, а также не пошаговое измерение ускорения во всем диапазоне. Отсутствие разбиения всего диапазона измерения на отдельные участки (шаги) не позволяет увеличить точность измерения, изменить масштаб измерения на отдельных участках диапазона теми же деталями (элементами) измерения и той же точностью, что применяемые первоначально по всему диапазону измерения ускорения.
Кроме того, в известном способе измерения ведутся аналоговым способом, без использования устройств с частотным выходом, что также снижает точность преобразования и измерения ускорения и перевод его значений в скорость объекта.
Целью изобретения является повышение точности измерения, используя отдельные участки изменения измеряемого параметра, т.е. измерение «приращений» измеряемого параметра, с аналоговым преобразованием ускорения в пропорциональное давление и далее в частоту.
Для устранения указанных недостатков способа-прототипа предлагается способ пневматического преобразования ускорения движения тела в скорость, при котором ускорение инерционной массы преобразуют в давление, усиливают и интегрируют, отличающийся тем, что используют аналоговую обратную связь по ускорению на всем диапазоне ускорения, диапазон входного давления, соответствующий диапазону ускорения, разделяют на отдельные участки входных давлений, функционально отделяют общий выходной диапазон давления для всех участков от участков входных давлений, соответствующих участкам ускорения, по командам верхнего и нижнего порогов давлений последовательно включают и выключают участки, преобразуют давление в частоту и интегрируют с кодом соответствующего участка для получения значений скорости.
Для устранения указанных недостатков устройства-прототипа предлагается устройство пневматического преобразования ускорения движения тела в скорость, содержащее инерционную массу, усилитель, сумматор и интегратор, отличающееся тем, что к выходу мембранного сумматора с аналоговой обратной связью подключены введенные пневмоповторители со сдвигом, выходом каждый связан по питанию со своим клапаном включения/выключения по числу участков, разделяющих диапазон ускорения, их выходы объединены с реле верхнего и нижнего порога выходного давления, через импульсаторы последних с реверсивным счетчиком, связанного с элементами И, и входами клапанов включения/выключения, и подключены к усилителю давления участков, выход которого подсоединен через струйный генератор к счетчику, который вместе с реверсивным счетчиком подключен к вычислителю.
В предложенном способе и устройстве функционально разделены давление P3i на входе пневмоповторителей со сдвигом, имеющим различные величины поддиапазонов по участкам, от давления на выходе P5, с общим диапазоном для всех участков, после струйных триггеров, выполняющих роль клапанов включения в работу и выхода из нее по участкам.
Выходной частотный пневматический элемент - струйный генератор, преобразующий аналоговый сигнал в частоту, имеет ограниченный линейный диапазон в характеристике «давление - расход - частота».
Процедура увеличения точности состоит в том, что ограниченным диапазоном частоты измеряем не весь диапазон входных значений параметра - ускорения, а его отдельные участки. Т.е. сканируем входной диапазон ускорения по отдельным участкам измерения с последовательным переключением и подключением этих участков к выходному параметру - частоте - в полном линейном диапазоне.
Таким образом, входные участки имеют уменьшенный диапазон, а выходной линейный частотный диапазон измерения ускорения устройства один и тот же для всех входных участков.
Например, в обычной схеме измерения весь входной диапазон ускорения Δj=10 g, a весь выходной диапазон частоты струйного генератора Δf=1000 Гц. Тогда, в линейной шкале ошибка на 1 импульс будет составлять 10/1000=1%.
В предложенном устройстве измерения входной диапазон ускорения делится, например, на 10 участков, т.е. Δj=1 g и выходной диапазон частоты тот же Δf=1000 Гц. При этом ошибка на 1 импульс будет составлять 1/1000=0,1%. Следовательно, в данном примере с предложенным измерительным преобразователем получим уменьшение погрешности измерения в 10 раз.
На фиг.1 представлена схема устройства пневматического преобразования ускорения в скорость на пневматических элементах. Функциональные пневматические устройства обозначены: 1 - чувствительный блок-сумматор; 2 - инерционная масса; 3 - усилитель мощности; 4-1, 4-2, 4-3, 4-4 - пневматические повторители давления со сдвигом по участкам; 5-1, 5-2, 5-3, 5-4 - струйные триггеры (клапаны) включения/выключения участков измерения; 5-11, 5-21, 5-31, 5-41 - обратные клапаны участков; 6, 6-1 - струйное реле верхнего порога выходного давления на измерительном участке и его импульсатор; 7, 7-1 - струйное реле нижнего порога давления на измерительном участке и его импульсатор; 8-1, 8-11 - струйные логические элементы И выключения первого участка, 8-2 струйный логический элемент И выключения первого участка и включения второго участка; 8-21 - струйный логический элемент И выключения второго участка и включения первого участка; 8-3 - струйный логический элемент И выключения второго участка и включения третьего участка; 8-31 - струйный логический элемент И выключения третьего участка и включения второго участка; 8-4, 8-41 - струйные логические элементы И выключения третьего участка и включения четвертого участка; 8-42 - струйный логический элемент И выключения четвертого участка и включения третьего участка; 9 - аналоговый усилитель давления, 10 - струйный генератор, 11 - счетчик импульсов, 12 - реверсивный счетчик-указатель кода участков, 13 - вычислитель скорости.
Чувствительный блок 1 представляет собой трехмембранный элемент сравнения (например, типа П2ЭС.1) с дифференциальными соплами и инерционной массой 2, укрепленной на общем штоке мембран. Выходы камер блока 1, в которых расположены сопла, соединены между собой и с входом усилителя мощности 3. Перемещение Х инерционной массы 2 относительно корпуса блока в течение некоторого времени является мерой действующего ускорения j на чувствительный блок 1 и выражено формулой Х=k1j, а давление выхода блока связано с перемещением P1=k2X.
Усилитель мощности 3 (например, типа П2П.7) предназначен для создания выходного сигнала, равного по величине давления входному сигналу и усиленного по расходу. Давление выхода усилителя мощности, равное Р3=k3P1, поступает одновременно ко всем пневмоповторителям со сдвигом по участкам. Для примера приведено устройство, состоящее из четырех участков.
Пневматические повторители со сдвигом 4-1, 4-2, 4-3, 4-4 (например, типа П2П.2) предназначены для создания выходного сигнала, отличающегося по давлению от входного сигнала на постоянную величину Pi (величину сдвига) или на величину диапазона i от входной величины Δj, которая задается установочной пружиной и является постоянной во всем диапазоне допустимого изменения входного сигнала j, т.е. P4i=k4 (P3-Pi). Первый участок имеет сдвиг Pi1=0, второй Pi2=0,3, третий Pi3=0,6 атм, четвертый Pi4=0,9 атм относительно условного нуля Р3=0,1 атм. Кроме того, повторитель со сдвигом имеет упор ограничения максимального значения давления на участке, например на первом - 0,4 атм, на втором - 0,7 атм, на третьем - 1,0 атм, на четвертом - 1,3 атм.
Дискретные клапаны 5-1, 5-2, 5-3, 5-4 участков, выполненные, например, в виде струйных триггеров, предназначены для коммутации непрерывных сигналов давления Р3, пропорциональных измеряемому ускорению j и поступающих после усилителя мощности 3 через пневмоповторители со сдвигом 4-1, 4-2, 4-3, 4-4 в выходное давление P5 для передачи его на аналоговый усилитель давления 9. Выходное давление пневмоповторителя имеет токовую связь со струйным триггером (клапаном), поскольку его аналоговый сигнал поступает в сопло питания триггера и далее в общую линию давления выхода, в которой обратные клапаны участков и переключение триггеров не позволяют смешивать выходные аналоговые сигналы по участкам. В процедуре измерения ускорения функционирует только один участок, остальные еще не включены в измерение или выведены из него.
Усилитель давления 9 аналоговых сигналов (например, типа П2ЭС.1) представляет собой трехмембранный элемент сравнения с дифференциальными соплами. Выходы камер блока, в которых расположены сопла, соединены между собой и с входом струйного преобразователя аналогового сигнала в частоту - струйного генератора 10. Двухвходовой усилитель, охваченный отрицательной обратной связью через пневмосопротивление с проводимостью koc и соединенный с атмосферой переменным сопротивлением с проводимостью k1, позволяет получить умножение входной величины на постоянный коэффициент более единицы в виде P9i=k9P5i.
Струйный преобразователь 10 аналогового сигнала по расходу в выходной частотный сигнал давления - это струйный генератор (СГ), состоящий из нескольких (например, трех) дискретных струйных элементов, соединенных в последовательную схему и замкнутую на себя. СГ передает частотные импульсы давления в счетчик 11 в виде F11i=k11P9i.
Струйный счетчик 11 пневматических импульсов давления передает в вычислитель 14, который интегрирует их с кодом от реверсивного счетчика-указателя кодов 12 того участка, на котором производилось измерение ускорения. Струйный счетчик 11 выполнен, например, в двоичном коде. Реверсивный счетчик 13 выполнен, например, по патенту №470801.
Работает пневматическое устройство преобразования ускорения в скорость на пневматических элементах следующим образом.
Разделим весь диапазон измеряемого ускорения, например 4 g, несколькими участками, например, на 4, крайние значения которых будут соответствовать минимальному (например, 100 Гц) и максимальному значению по частоте f (например, 1000 Гц). Для повышения чувствительности по частоте f в предлагаемом устройстве введены пневматические элементы для каждого участка измерения. Весь диапазон изменения ускорения можно разделить на любые по величине участки и любое количество, т.е. увеличить точность измерения в наиболее значимых изменениях j.
Давление питания Pn подано в прибор и действует ускорение j при движении объекта на инерционную массу М. Подано давление на пневмоповторители со сдвигом 4-1, 4-2, 4-3, 4-4 с начальным уровнем, например до 0,1 атм. Давление Р3 в общей линии, связанной с величиной ускорения j, поступает в пневмоповторители, которые ожидают своей очереди на включение в работу. Все триггеры 5-1, 5-2, 5-3, 5-4 по участкам включены на закрытие, имеют на выходе «1», как показано на фиг.1.
На первом участке диапазона измерения ускорения j, например в пределах 0…1 g, формируется давление P3, например 0,1…0,4 атм, пропорциональное ускорению j, полученное инерционной массой 2, укрепленной на мембранном блоке. Полный диапазон входной линии давления Р3 изменяется в пределах 0,1…1,3 атм и соответствует полному диапазону ускорения 4 g и диапазону давления 0,05…0,2 атм в выходной линии давления P5 на любом участке приращения ускорения j. Каждый пневмоповторитель со сдвигом пропускает через себя диапазон давления в приращениях, равный 0,3 атм. По участкам эти диапазоны следующие - для первого 0,1≤Р3≤0,4 атм; для второго 0,4≤Р3≤0,7 атм; для третьего 0,7≤P3≤1,0 атм; для четвертого 1,0≤Р3≤1,3 атм.
Входное давление Р3 поступает в камеру пневмоповторителя со сдвигом 4-1 и далее аналоговый сигнал давления P4-1, не связанный током с входным давлением Р3, поступает в сопло питания струйного триггера 5-1. Далее под воздействием управляющего сигнала  реверсивного счетчика 12 сигнал проходит через обратный клапан 5-11 в линию выхода с давлением P5, передается в усилитель давления участков 9 и преобразуется в частотные импульсы давления в струйном генераторе 10, которые откладываются в струйном счетчике 11 для передачи вычислителю 13 и определения скорости движения объекта за определенный период времени по числу накопленных пневмоимпульсов с кодом «00» двухразрядного реверсивного счетчика 12. Работает струйный генератор, вырабатывая частоту. При давлении Р3 (например 0,1 атм) фиксируется начальный уровень частоты, соответствующий ускорению j=0. Далее давление Р3 подается в камеру ОС сумматора 1 в качестве отрицательной обратной связи для компенсации действия ускорения j на инерционную массу 2 на всем диапазоне действия измеряемого ускорения, т.е. на всех участках, начиная с первого.
реверсивного счетчика 12 сигнал проходит через обратный клапан 5-11 в линию выхода с давлением P5, передается в усилитель давления участков 9 и преобразуется в частотные импульсы давления в струйном генераторе 10, которые откладываются в струйном счетчике 11 для передачи вычислителю 13 и определения скорости движения объекта за определенный период времени по числу накопленных пневмоимпульсов с кодом «00» двухразрядного реверсивного счетчика 12. Работает струйный генератор, вырабатывая частоту. При давлении Р3 (например 0,1 атм) фиксируется начальный уровень частоты, соответствующий ускорению j=0. Далее давление Р3 подается в камеру ОС сумматора 1 в качестве отрицательной обратной связи для компенсации действия ускорения j на инерционную массу 2 на всем диапазоне действия измеряемого ускорения, т.е. на всех участках, начиная с первого.
Пневмоповторитель 6-1 первого участка пропускает давление Р3 в пределах, например, 0,1≤Р3≤0,4 атм, соответствующее изменению ускорения 0…1 g и давлению P5 в пределах 0,05≤0,2 атм. Далее сигнал проходит через усилитель давления участков 9, получая на выходе значение давления в пределах 0,1…1,0 атм, в струйный генератор 10, который развивает частоту, например 100…1000 Гц в диапазоне, близком к линейному. Струйный триггер 5-1 включает и удерживает связь с линией общего выходного давления P5 в течение изменения ускорения на первом участке 0…1 g.
Ускорение j увеличивается до 1 g. При достижении значения давления во входной линии P3 ~ 0,4…0,42 атм в выходной линии P5 давление на первом участке будет 0,21>0,2 атм, т.е. более верхнего порога (0,2 атм) струйного реле 6, которое переключает струю питания. Сигнал давления поступает в импульсатор 6-1 для передачи по трем направлениям: 1) в линию «+» в реверсивный счетчик 12 - указатель кода, фиксируя ввод кода «10» второго участка в измерение ускорения сигналом 20=1; 2) в струйный И элемент 8-2, куда поступает также импульс с выхода 20 реверсивного счетчика, и далее в триггер 5-2 для включения связи с линией общего выходного давления Р5 линии давления Р3 через пневмоповторитель со сдвигом 4-2 второго участка измерения ускорения j; 3) одновременно триггер 5-1 выключает из работы первый участок измерения ускорения j по сигналу от 8-2.
После этого давление Р3 не поступает на первый участок, поступает только на второй участок и далее включаются в работу пневматические пороговые элементы, общие для всех участков измерения ускорения j.
Число импульсов струйного генератора 10 на первом участке накапливается счетчиком 11 и передается вычислителю 13 на струйных триггерах за период времени, которое отражает скорость объекта, передвигающегося с ускорением j≤1 g на отрезке времени 0…t1. При переходе на второй участок измерения ускорения набранное число импульсов давления на первом участке обнуляется по команде вычислителя 13 и начинается набор числа импульсов для второго участка. Обнуление возможно также периодически или после подсчета величины скорости на первом участке. При ускорении  в крайнем положении по давлению первого участка выходная частота f СГ имеет максимальное значение.
в крайнем положении по давлению первого участка выходная частота f СГ имеет максимальное значение.
На втором участке диапазона измерения ускорения j, например в пределах 1 g … 2 g, чувствительным элементом 1 формируется давление Р3, например 0,4…0,7 атм, пропорциональное ускорению j. В общей линии давления P5 этому соответствует вырабатываемое пневмоповторителем 4-2 через струйный триггер давление 0,05…0,2 атм.
Измерение на этом участке снова начинается с минимальной частоты f струйного генератора 10, т.к. пневмоповторитель 4-2 начинает свою работу с минимального давления 0,1 атм, благодаря свойству сдвига передает в линию питания триггера 5-2 сигнал 0,1 атм и через струйный генератор 10 проходит минимальный расход Q. Увеличивается давление P5 и усилитель 9 подает в СГ расход с увеличенным давлением (~6 раз) на увеличение частоты.
При увеличении ускорения j>1 g увеличивается давление Р3, которое проходит в камеру обратной связи мембранного сумматора 1 для компенсации возросшего ускорения j, т.е. контур обратной связи продолжает работать на втором участке ускорения, также и на последующих участках, независимо от включенного/выключенного участка измерения. Обратные клапаны 5-11, 5-21, 5-31, 5-41 обеспечивают независимость работы по участкам.
При неожиданном изменении направления приращения ускорения j с «+» на «-» на втором участке в общей выходной линии давление уменьшается до величины, например, Р5<0,05 атм давления, поступающего от сопла струйного реле 7. Реле 7 переключается, посылая сигнал через импульсатор 7-1 по направлениям: 1) в реверсивный счетчик 12 для изменения кода на «00» и выработки сигнала  2) на переключение триггера 5-2 элементом И 8-21, в котором он складывается с сигналом
2) на переключение триггера 5-2 элементом И 8-21, в котором он складывается с сигналом  , для отключения пневмоповторителя со сдвигом 6-2 от линии давления P5, 3) одновременно через струйный И элемент 8-21 на триггер 5-1 для связи общей линии давления P5 с пневмоповторителем со сдвигом 6-1 и включения в работу первого участка измерения ускорения j.
, для отключения пневмоповторителя со сдвигом 6-2 от линии давления P5, 3) одновременно через струйный И элемент 8-21 на триггер 5-1 для связи общей линии давления P5 с пневмоповторителем со сдвигом 6-1 и включения в работу первого участка измерения ускорения j.
Дальнейшее падение ускорения j<0 при наличии сигнала импульсатора 7-1 и появление от реверсивного счетчика сигналов  и
и  , которые совместно через элементы И 8-1 и 8-11 отключают триггер 5-1 от линии Р5, приводит к выключению прибора из работы.
, которые совместно через элементы И 8-1 и 8-11 отключают триггер 5-1 от линии Р5, приводит к выключению прибора из работы.
При обратном изменении (на +) приращения величины ускорения j на первом участке вновь давление в линии Р3 увеличивается. Входное давление Р3 поступает в камеру пневмоповторителя со сдвигом 4-1 и аналоговый сигнал давления P4-1 поступает в сопло питания струйного триггера 5-1. Далее под воздействием управляющего сигнала  реверсивного счетчика 12 сигнал проходит через обратный клапан 5-11 в линию выхода с давлением P5. Если ускорение растет, давление в линии Р3 увеличивается, например >0,4 атм, в линии P5 увеличивается до величины >0,2 атм. Преодолевая верхний порог, сигнал переключает реле 6, от импульсатора 6-1 реверсивный счетчик - указатель кода 12 на «10», далее элементом И 8-2 включается триггер 5-2, выключается триггер 5-1 и включается в работу второй участок измерения приращения ускорения j.
реверсивного счетчика 12 сигнал проходит через обратный клапан 5-11 в линию выхода с давлением P5. Если ускорение растет, давление в линии Р3 увеличивается, например >0,4 атм, в линии P5 увеличивается до величины >0,2 атм. Преодолевая верхний порог, сигнал переключает реле 6, от импульсатора 6-1 реверсивный счетчик - указатель кода 12 на «10», далее элементом И 8-2 включается триггер 5-2, выключается триггер 5-1 и включается в работу второй участок измерения приращения ускорения j.
На втором участке измерения приращения ускорения j давление Р3 достигнет своего максимального значение (>0,7 атм), в линии Р5 давление будет соответствовать величине >0,2 атм, вырабатываемое пневмоповторителем со сдвигом 6-2. При этом переключается реле 6, которое, как и на первом участке, через импульсатор 6-1 подает сигнал в реверсивный струйный счетчик - указатель кода 12 для перехода на код «01» третьего участка, который сигналом  вместе с сигналом импульсатора 6-1 через элемент И 8-3 переключает триггер 5-2, отключая общую линию давления P5 от пневмоповторителя со сдвигом 4-2, а также триггером 5-3 включает линию давления Р3 с пневмоповторителем со сдвигом 4-3.
вместе с сигналом импульсатора 6-1 через элемент И 8-3 переключает триггер 5-2, отключая общую линию давления P5 от пневмоповторителя со сдвигом 4-2, а также триггером 5-3 включает линию давления Р3 с пневмоповторителем со сдвигом 4-3.
Число импульсов струйного генератора 10 фиксируется вычислителем 13, которое отражает скорость объекта, передвигающегося с ускорением 1 g ≤ j ≤ 2 g на отрезке времени t1…t2. При ускорении j>2 g выходная частота f имеет максимальное значение.
На третьем участке диапазона измерения ускорения j, например в пределах 2 g … 3 g, формируется давление Р3, например 0,7…1,0 атм, пропорциональное ускорению j. В линии давления P5 третьего участка формируется давление 0,05…0,2 атм.
В начале третьего участка при j≥2 g частота f струйного генератора 10 снова равна минимальному значению. При j=3 g частота f максимальна. При давлении в линии P5>0,2 атм вырабатываются три сигнала - от импульсатора 6-1, от реверсивного счетчика 12 с кодом «11» сигналы 20=1 и 21=1, которые вместе включают триггер 5-4 и выключают триггер 5-3. Теперь работает четвертый участок.
При уменьшении величины ускорения менее 3 g уменьшается давление в линии P5<0,05 атм. При этом вырабатываются следующие сигналы - от импульсатора 7-1 по линии «-» в реверсивный счетчик 12, который переходит на код третьего участка «01» и вырабатывает сигнал  . Вместе эти сигналы через элемент И 8-42 выключают триггер 5-4 и включают триггер 5-3 для работы на третьем участке.
. Вместе эти сигналы через элемент И 8-42 выключают триггер 5-4 и включают триггер 5-3 для работы на третьем участке.
Если измерение производилось на четвертом участке и ускорение продолжает увеличиваться, при котором давление в линии становится Р3>1,3 атм, то давление в камере ОС чувствительного блока 1 уже не компенсируется. При этом мембранный блок устанавливается на упор вблизи сопла слива, максимальное давление не меняется и процедура измерения ускорения не осуществляется до тех пор, пока ускорение не снизится <4 g и мембранный блок изменит свое положение.
Однако измерение внутри четвертого участка производится при изменении ускорения в «+» и «-» и при уменьшении ускорения j<3 g происходит переключение пневмоэлементов для включения в работу третьего участка измерения, подобно описанному ранее переходу во второго участка на первый.
Сумма числа импульсов струйного генератора 10 по измерительным участкам со своими кодами, подсчитанная вычислителем 13, выражает скорость объекта в конце третьего участка в течение некоторого периода времени.
В данном примере устройства число участков измерения всего диапазона ускорения j равно четырем. Если число участков >4, то необходимо в схему, приведенную на фиг.1, добавить функциональные элементы, аналогичные участку 4.
Таким образом, предложенный способ увеличивает точность измерения ускорения путем деления всего диапазона на отдельные измерительные участки и преобразование его в скорость частотным способом с помощью пневматических элементов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ И ПНЕВМАТИЧЕСКИЙ СКОРОСТЕМЕР ДЛЯ ТЕЛА | 2010 |
|
RU2421733C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ТЕЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2420745C1 |
| Способ преобразования струйного частотного сигнала | 2021 |
|
RU2771920C1 |
| Преобразователь струйного частотного сигнала | 2021 |
|
RU2762540C1 |
| Устройство преобразования давления в пропорциональную частоту | 2021 |
|
RU2772700C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПОВЕРХНОСТНОГО НАТЯЖЕНИЯ ЖИДКИХ СРЕД И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2208777C2 |
| Гидростатический уровнемер | 1979 |
|
SU800661A1 |
| Пневматический течеискатель | 1984 |
|
SU1249360A1 |
| СПОСОБ ПНЕВМАТИЧЕСКОГО ЧАСТОТНОГО ИЗМЕРЕНИЯ УСКОРЕНИЯ ДВИЖЕНИЯ ТЕЛА | 2015 |
|
RU2601271C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ НЕПРЕРЫВНОГО СИГНАЛА В ЧАСТОТУ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2413269C2 |
Изобретение относится к устройствам, использующимся при навигации летательных аппаратов, при измерении ускорения и скорости. Способ пневматического преобразования ускорения движения тела в скорость, при котором ускорение инерционной массы преобразуют в давление, усиливают и интегрируют. При этом используют аналоговую обратную связь по ускорению на всем диапазоне ускорения. Диапазон входного давления, соответствующий диапазону ускорения, разделяют на отдельные участки входных давлений. Функционально отделяют общий выходной диапазон давления для всех участков от участков входных давлений, соответствующих участкам ускорения. Затем по командам верхнего и нижнего порогов давлений последовательно включают и выключают участки, преобразуют давление в частоту и интегрируют с кодом соответствующего участка для получения значений скорости. Устройство пневматического преобразования ускорения движения тела в скорость содержит чувствительный блок, выполненный в виде мембранного сумматора с дифференциальными соплами и инерционной массой, усилитель мощности, вход которого соединен с выходами мембранного сумматора. В устройство дополнительно введены пневмоповторители со сдвигом, подключенные к выходу мембранного сумматора с аналоговой обратной связью. При этом выходом каждый связан по питанию со своим клапаном включения/выключения по числу участков, разделяющих диапазон ускорения, их выходы объединены с реле верхнего и нижнего порога выходного давления, через импульсаторы последних с реверсивным счетчиком, связанного с элементами И, и входами клапанов включения/выключения, и подключены к усилителю давления участков, выход которого подсоединен через струйный генератор к счетчику, который вместе с реверсивным счетчиком подключен к вычислителю. Технический результат - повышение точности измерения скорости движения тела. 2 н.п. ф-лы, 1 ил.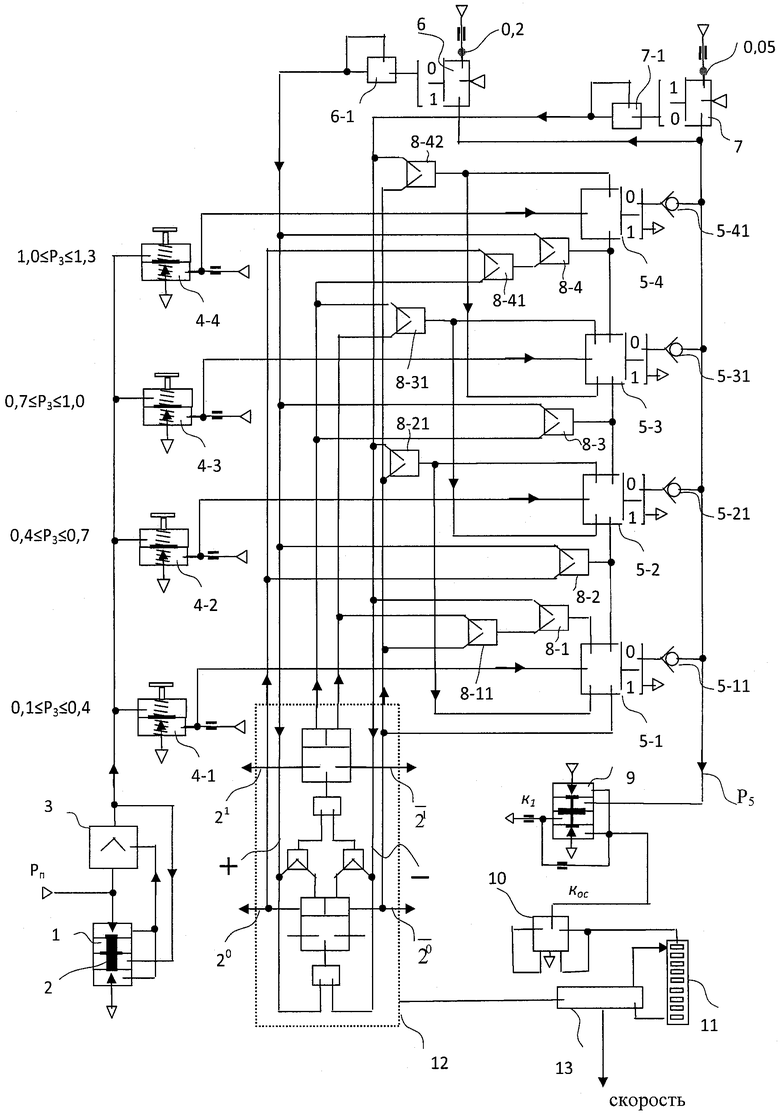
1. Способ пневматического преобразования ускорения движения тела в скорость, при котором ускорение инерционной массы преобразуют в давление, усиливают и интегрируют, отличающийся тем, что используют аналоговую обратную связь по ускорению на всем диапазоне ускорения, диапазон входного давления, соответствующий диапазону ускорения, разделяют на отдельные участки входных давлений, функционально отделяют общий выходной диапазон давления для всех участков от участков входных давлений, соответствующих участкам ускорения, по командам верхнего и нижнего порогов давлений последовательно включают и выключают участки, преобразуют давление в частоту и интегрируют с кодом соответствующего участка для получения значений скорости.
2. Устройство пневматического преобразования ускорения движения тела в скорость, содержащее чувствительный блок, выполненный в виде мембранного сумматора с дифференциальными соплами и инерционной массой, укрепленной на общем штоке мембраны, усилитель мощности, вход которого соединен с выходами мембранного сумматора, и вычислитель, выполненный с возможностью определения скорости объекта в течение заданного периода времени, отличающееся тем, что к выходу мембранного сумматора с аналоговой обратной связью подключены введенные пневмоповторители со сдвигом, выходом каждый связан по питанию со своим клапаном включения/выключения по числу участков, разделяющих диапазон ускорения, их выходы объединены с реле верхнего и нижнего порогов выходного давления, через импульсаторы последних - с реверсивным счетчиком, связанным с элементами И и входами клапанов включения/выключения, и подключены к усилителю давления участков, выход которого подсоединен через струйный генератор к счетчику, который вместе с реверсивным счетчиком подключен к вычислителю.
| РАННЕВ Г.Г., ТАРАСЕНКО А.П | |||
| МЕТОДЫ И СРЕДСТВА ИЗМЕРЕНИЙ | |||
| - М.: ИЗДАТЕЛЬСКИЙ ЦЕНТР АКАДЕМИЯ, 2008 | |||
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2001 |
|
RU2199754C2 |
| US 3597598 А, 03.08.1971 | |||
| CN 1482466 А, 17.03.2004 | |||
| GB 244330 А, 17.12.1925. | |||

