Изобретение относится к точному приборостроению и может быть использовано, например, для обследования нефтяных, газовых и геофизических обсаженных и необсаженных скважин путем движения скважинного прибора в скважине в непрерывном или точечном режимах.
Известен способ определения азимута обсаженной скважины в последовательных точках посредством гироскопического инклинометра (авт. св. СССР N 1548423, кл. E 21 B 47/02, Бюл. N 9, 07.03.90), включающий в себя последовательные операции: горизонтирование трехстепенного гироскопа, определение угла между осью инклинометра и вектором кинетического момента трехстепенного гироскопа, т. е. угла азимута, и преобразование этого угла в электрический сигнал посредством индуктивного датчика.
Известен также способ определения азимута обсаженной скважины в последовательных точках посредством гироскопического инклинометра (патент РФ N 2030574, кл. E 21 B 47/02, Бюл. N 7, 10.03.95), который усовершенствует вышеназванный способ в части определения и компенсации дрейфа трехстепенных гироскопов, на базе которых построены измерители угловых скоростей вокруг трех взаимно перпендикулярных осей.
Оба способа не позволяют производить обследование скважины при непрерывном движении скважинного прибора, что снижает производительность проведения инклинометрических работ.
Известен также способ непрерывного обследования скважины, взятый за прототип, который позволяет измерять азимут и зенитный угол скважины и который реализован в инклинометре (патент РФ N 2004786, кл. E 21 B 47/02, Бюл. N 45-46, 15.12.93). Указанный способ основан на измерении ускорений относительно двух взаимно перпендикулярных осей, измерении угловых скоростей относительно двух взаимно перпендикулярных осей, совпадающих с осями измерения ускорений, на измерении угла поворота скважинного прибора относительно стабилизированного в плоскости горизонта и в азимуте направления, построенного трехстепенным гироскопом. При этом в режиме начальной выставки используют все пять вышеназванных операций в сочетании с алгоритмами, которые по структуре представляют тригонометрические уравнения, соответствующие сигналам измерения угловых скоростей, и выражение для вычисления кардановой погрешности, в которое входят зенитный и апсидальные углы, определяемые по измерениям ускорений, и угол поворота скважинного прибора вокруг продольной оси относительно стабилизированного направления. В результате работы алгоритма начальной выставки определяется азимут стабилизированного направления (азимут главной оси трехстепенного гироскопа). В режиме измерения параметров ориентации скважины (азимута и зенитного угла) при непрерывном движении скважинного прибора используются операции измерения ускорений, измерения угла поворота скважинного прибора вокруг продольной оси, вычисленное и запомненное в режиме начальной выставки значение азимута главной оси гироскопа, а также алгоритмы формирования азимута и зенитного угла скважины. Так как при этом азимут скважины измеряют в горизонтальной плоскости, а угол поворота скважинного прибора вокруг продольной оси, отклоненной от местной вертикали на зенитный угол, то для компенсации методической погрешности измерения основу алгоритма составляет тригонометрическое выражение для вычисления кардановой погрешности. При формировании азимута скважины (плоскости наклонения) осуществляется алгоритмическая компенсация вертикальной составляющей угловой скорости вращения Земли и систематической составляющей угловой скорости дрейфа гироскопа.
Однако, в способе прототипа, также как и в способах аналогов, измерение ускорений осуществляется измерителями ускорений, жестко закрепленными на корпусе скважинного прибора, что порождает дополнительные погрешности в режиме непрерывного измерения, так как измерители ускорений участвуют во вращении скважинного прибора вокруг продольной оси.
Известны гироскопические инклинометры (Уттект Г.У. де-Вард ДЖ.П. Новый гироскоп для геофизических исследований. Нефть, газ и нефтехимия за рубежом, 1983, N 3, с. 14-19; патент РФ N 2030574, кл. E 21 B 47/02, Бюл. N 7, 10.03.95), построенные на базе блоков акселерометров (измерителей ускорений) и датчиков угловых скоростей (измерителей угловых скоростей) на основе трехстепенных гироскопов, например, динамически настраиваемых гироскопов, которые жестко закреплены на корпусе скважинного прибора. При этом датчики угловых скоростей в гироинклинометре (патент РФ N 2030574) в процессе формирования измерительной информации устанавливают последовательно каждый датчик в два положения, отличающиеся друг от друга разворотом на 180o относительно оси, перпендикулярной к осям измерения угловых скоростей.
Наряду с блоком измерителей ускорений и угловых скоростей, гироинклинометр содержит наземный вычислитель, который каротажным кабелем связан с измерителем ускорений и угловых скоростей. Указанные инклинометры имеют следующие недостатки: инклинометр работает только в точечном режиме, что увеличивает время обследования скважин и приводит к снижению производительности инклинометрических работ.
Известен также инклинометр гироскопического типа (патент РФ N 2004786, кл. E 21 B 47/02, Бюл. N 45-46, 15.12.93), содержащий наземный вычислитель и связанный с ним каротажным кабелем скважинный прибор, содержащий жестко закрепленные на корпусе измеритель ускорений по двум взаимно перпендикулярным осям, и измеритель угловой скорости по двум взаимно перпендикулярным осям, например, на основе динамически настраиваемого гироскопа, оси чувствительности которых параллельны и перпендикулярны к продольной оси скважинного прибора, трехстепенной гироскоп с датчиком угла по внешней оси, направленной по продольной оси скважинного прибора, и контуром коррекции для горизонтирования главной оси гироскопа в режиме выставки. Выходы двухкомпонентных измерителей ускорений и угловых скоростей, выход датчика углов трехстепенного гироскопа соединены каротажным кабелем с наземным вычислителем, снабженным блоком компенсации видимого ухода гироскопа и систематической составляющей его дрейфа, а также задатчиком режимов работы выставка движения.
Особенность работы инклинометра прототипа состоит в следующем. В режиме выставки ось ротора системы горизонтирования приводится в горизонтальное положение. По сигналам измерителей ускорений, угловых скоростей и датчика угла трехстепенного гироскопа аналитически вычисляется азимут его главной оси и запоминается в наземном вычислителе.
В режиме движения отключается горизонтальная коррекция трехстепенного гироскопа и по сигналам его датчика угла и измерителей ускорений аналитически формируются азимут и зенитный угол скважины.
Данный инклинометр имеет ряд недостатков. Так как измерители ускорений жестко закреплены на корпусе скважинного прибора, то в режиме непрерывного движения скважинного прибора в скважине возникают дополнительные погрешности, обусловленные его вращением вокруг продольной оси. Кроме того, при автоматической компенсации угловой скорости дрейфа трехстепенного гироскопа не учитывается, что при изменении зенитного угла будет изменяться угол между осью ротора и осью наружной рамы гироскопа, влияющий на величину угловой скорости дрейфа, что не отражено в алгоритмах. В описании изобретения также не указываются аппаратные средства преобразования и передачи информации с измерителей ускорения угловых скоростей и датчика угла трехстепенного гироскопа в наземный вычислитель, которые также влияют на точность определения азимута и зенитного угла.
Задача изобретения повышение точности определения азимута и зенитного угла скважины при непрерывном движении скважинного прибора в скважине.
Поставленная задача решается тем, что в способе определения азимута и зенитного угла скважины посредством гироскопического инклинометра, включающем измерение ускорения силы тяжести по двум взаимно перпендикулярным осям, измерение угловой скорости относительно одной из вышеназванных осей посредством трехстепенного гироскопа, определение начальной ориентации осей чувствительности измерителей ускорений в азимуте, вычисление азимута и зенитного угла скважины, оси чувствительности измерителей ускорений и угловой скорости стабилизируют относительно оси, совпадающей с продольной осью скважинного прибора, а на каждом шаге работы вычислителя при движении скважинного прибора в скважине определяют азимут и зенитный угол скважины, например, по формулам
где i+1 текущий шаг работы вычислителя:
b
Bi+1 = ΔBi+1•Bi,
где Bi, Bi+1 матрицы ориентации на предыдущем и текущем шагах работы вычислителя;
приращение матрицы ориентации, элементы которой определяют в зависимости от углов ориентации θx, θy, θz по формулам
где ω
Ω
элементы матрицы ориентации, формируемые по результатам измерения проекций a
τ период дискретизации работы вычислителя, причем, начальное значение матрицы ориентации равно
где αхв азимутальный угол осей чувствительности измерителей ускорения в момент окончания выставки,
для определения которого в режиме выставки вращают оси чувствительности измерителей ускорений и угловой скорости вокруг оси стабилизации с постоянной скоростью на заданный угол, измеряют в последовательных положениях угол поворота осей чувствительности измерителей ускорений и угловой скорости относительно корпуса, горизонтальную составляющую угловой скорости вращения Земли Ωзг совместно с угловой скоростью дрейфа гироскопа относительно оси, являющейся осью чувствительности измерителя угловой скорости, по результатам измерений вычисляют среднюю угловую скорость вращения ωв осей чувствительности измерителей ускорений и угловой скорости, систематическую составляющую угловой скорости дрейфа гироскопа ω
ωэj = ω
где Φx/ фазовый сдвиг;
j номер измерения,
и для оценки фазового сдвига вычисляют функцию невязки, представляющую сумму квадратов разности эталонной ωэj и измеренной ωj угловых скоростей на всем наборе измерений, которую минимизируют по фазовому сдвигу, а азимутальный угол αхв оси чувствительности измерителя угловой скорости на момент окончания выставки определяют по формуле
αхв = ψв- ψ1+ αx1,
где ψ1, ψв углы поворота осей чувствительности измерителей ускорений (измерителя угловой скорости) относительно корпуса скважинного прибора вокруг оси стабилизации в моменты начала и окончания выставки;
αx1 азимут осей чувствительности измерителей ускорения (измерителя угловой скорости) в момент начала выставки соответствует такому значению фазового сдвига Φx, который минимизирует функцию невязки.
В соответствии со способом был разработан гироскопический инклинометр, в котором стабилизацию осей чувствительности измерителей ускорений и измерителя угловой скорости осуществляет одноосный индикаторный гиростабилизатор. Таким образом, в устройстве поставленная задача решается тем, что гироскопический инклинометр, состоящий из скважинного прибора, снабженного измерителем ускорений по двум взаимно перпендикулярным осям, которые перпендикулярны продольной оси скважинного прибора, и измерителем угловой скорости относительно одной из двух указанных осей в виде трехстепенного гироскопа, по осям подвеса которого установлены датчики углов и датчики моментов, причем первый датчик углов, закрепленный на оси подвеса, являющейся осью чувствительности измерителя угловой скорости, подключен через усилитель контура измерителя угловой скорости к второму датчику моментов по перпендикулярной к датчику угла оси, наземного вычислителя, снабженного блоком компенсации видимого ухода гироскопа и систематической составляющей его дрейфа, и связанного каротажным кабелем со скважинным прибором, отличающийся тем, что скважинный прибор содержит одноосный гиростабилизатор, на платформе которого жестко установлены измеритель ускорений с осями чувствительности, ориентированными перпендикулярно оси стабилизации гиростабилизатора, и трехстепенной гироскоп, второй датчик угла которого через усилитель стабилизации соединен с двигателем отработки, кинематически связанным с осью стабилизации, на которой закреплен выходной датчик угла, выполненный, например, в виде синусно-косинусного трансформатора, и блок цифровой обработки, к соответствующим входам которого подключены выходы датчика угла гиростабилизатора, выходы измерителя ускорений и выход измерителя угловой скорости, причем первый выход блока цифровой обработки соединен с управляющим входом задатчика эталонного тока, сигнальный выход которого подключен к первому датчику момента гироскопа, расположенному на оси, перпендикулярной оси стабилизации, а каротажный кабель двумя своими входами соединен с вторым и третьим выходами блока цифровой обработки, который, например, содержит однокристальную микроЭВМ, приемо-передатчик, три двухканальных преобразователя напряжение-частота и три двухканальных реверсивных счетчика, причем порты Р0 и Р2 однокристальной микроЭВМ, запрограммированные на ввод, соединены своими входами с соответствующими выходами младшего и старшего байтов шины данных реверсивных счетчиков, порт Р1, запрограммированный на вывод, разрядами с Р1.0 по Р1.5 подключен соответственно к входам разрешения выборки и разрешения чтения соответствующих реверсивных счетчиков, разряд Р1.6 подключен к входам опроса всех реверсивных счетчиков, а разряд Р1.7 соединен с входами синхронизации всех преобразователей напряжение-частота и реверсивных счетчиков, разряд порта Р3.0, запрограммированный на выдачу команды управления, соединен с первым выходом блока цифровой обработки, входы преобразователей напряжение-частота являются соответственно входами блока цифровой обработки, а вход/выход последовательного ввода/вывода однокристальной микроЭВМ через приемо-передатчик соединен с каротажным кабелем и является входом/выходом скважинного прибора.
Для сигнализации о температурном режиме в скважинном приборе установлен датчик температуры, который подключен к одному из входов блока цифровой обработки.
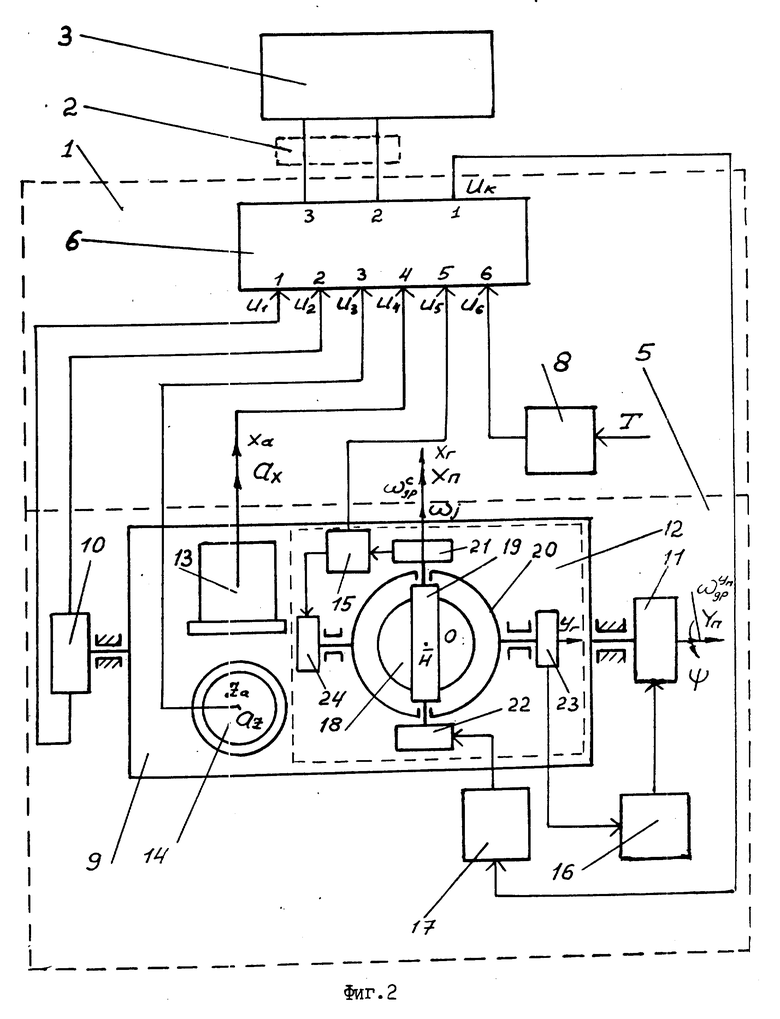
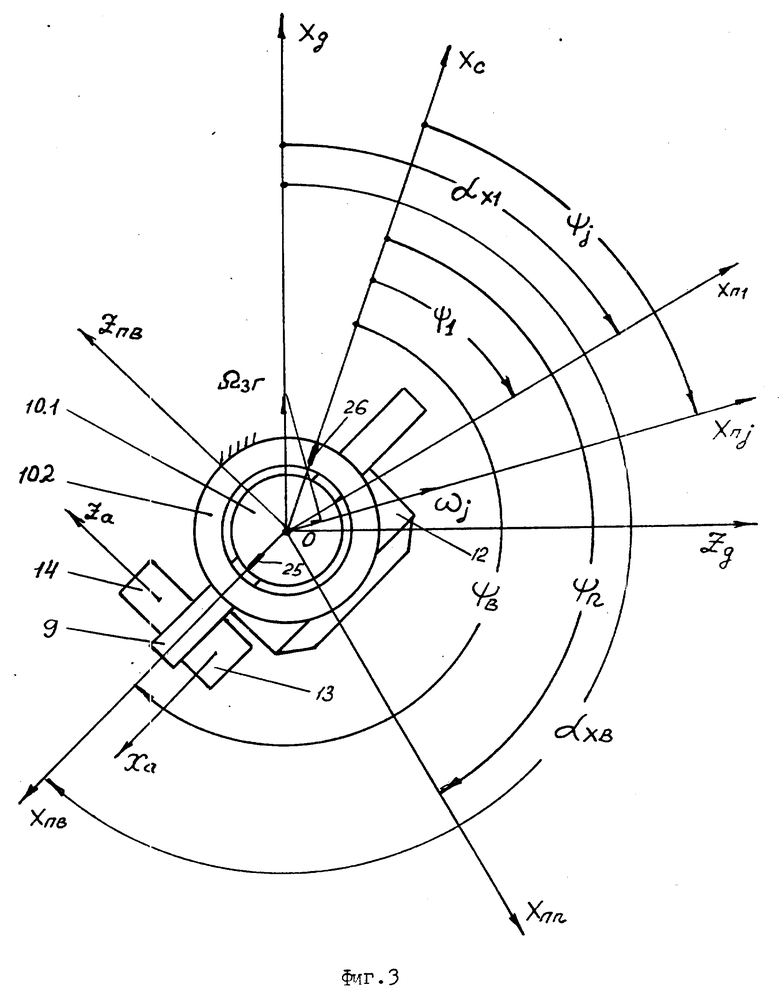
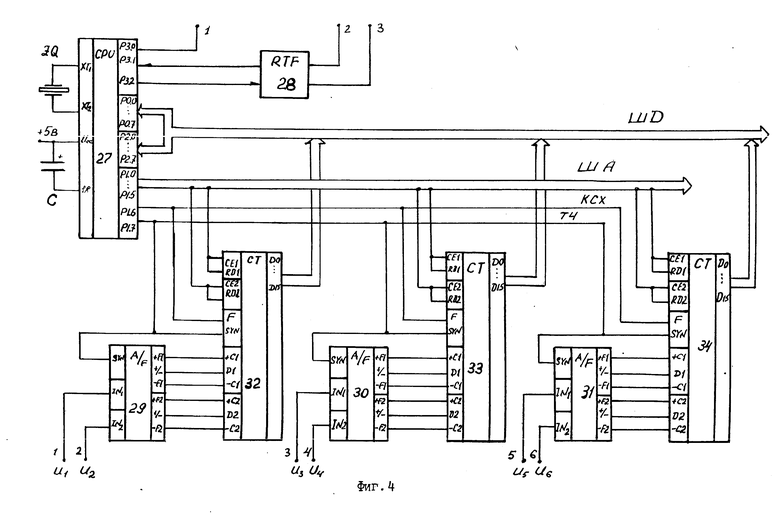
На фиг. 1 представлена обобщенная кинематическая схема гироскопического инклинометра и взаимное положение систем координат в произвольной точке скважины; на фиг.2 кинематическая схема гиростабилизатора и блок-схема связи скважинного прибора с наземным вычислителем; на фиг.3 схема положения осей чувствительности измерителя угловой скорости в азимуте при вращении ее вокруг оси стабилизации; на фиг.4 электрическая схема блока цифровой обработки.
На чертежах введены следующие обозначения:
1 скважинный прибор (СП);
2 каротажный кабель, который осуществляет спуск и подъем СП, подвод электрического питания, например, прием/передачу информации по двухпроводной линии связи последовательным кодом;
3 наземный вычислитель, например, РС-486 типа Note Book;
4 устройство подъема-спуска СП, например, электрическая лебедка с коллектором;
5 одноосный индикаторный гиростабилизатор (ГС);
6 блок цифровой обработки (БЦО);
7 вторичные источники питания (ВИП), преобразующие наземное силовое напряжение питания в набор напряжений для обеспечения работы СП (на фиг.2 для простоты не показаны);
8 датчик температуры;
9 платформа ГС, ось подвеса OYп которой совпадает с продольной осью OYс СП;
10 датчик угла поворота платформы ГС, например, одноканальный синусно-косинусный трансформатор типа СКТ-3250;
10.1 ротор датчика угла ГС;
10.2 статор датчика угла ГС;
11 двигатель отработки, например, датчик моментов типа ДМ-5 (двигатель постоянного тока с возбуждением от постоянных магнитов);
12 измеритель угловой скорости на базе трехстепенного гироскопа, например, типа Д-7-ОЗМ;
13, 14 измерители ускорений, например, малогабаритные типа АТ-1105;
15 усилитель канала измерения угловой скорости;
16 усилитель стабилизации;
17 задатчик эталонного тока;
18 ротор трехстепенного гироскопа;
19 внутренняя рамка (ВР) трехстепенного гироскопа;
20 наружная рамка (НР) трехстепенного гироскопа;
21, 22 датчики угла и момента относительно оси подвеса ВР;
23, 24 датчики угла и момента относительно оси подвеса НР;
25 нулевая риска ротора 10.1 определяет направление оси OXп - оси чувствительности измерителя угловой скорости;
26- нулевая риска статора 10.2 определяет направление OXс СП;
27 однокристальная микроЭВМ, например, типа КР1816 ВЕ51, она имеет встроенное программируемое ПЗУ емкостью 4096 байт, встроенное ОЗУ емкостью 128 байт, 4 восьмиразрядных двунаправленных порта (Р0, Р1, Р2, Р3), быстродействующий программируемый последовательный порт, работающий в мультиплексном режиме;
28 приемо-передатчик, его можно реализовать на оптронах, причем питание линии связи является питанием ВИП;
29, 30, 31 преобразователи напряжение-частота (ПНЧ), двухканальные реализованы в микросборочном исполнении в корпусе 159 по стандартной схеме (документация N ИСМЯ 431.321.001);
32, 33, 34 реверсивные счетчики реализованы на БИС К1806 ХМ1-242, содержат два автономных канала со схемами управления и синхронизации, а также выходные буферные регистры.
Системы координат, принятые на фиг.1-3, имеют следующие обозначения:
OXдYдZд земная географическая система координат, причем ось OXд ориентирована на север (N), ось OYд ориентирована по местной вертикали, ось OZд дополняет систему координат до правой;
OXсYсZс система координат, связанная с корпусом СП, причем ось OYс направлена по продольной оси СП, ось OXс ориентирована вдоль нулевой риски статора датчика угла 10, ось OZс дополняет систему координат до правой;
OXпYпZп система координат, связанная с платформой ГС (стабилизированные оси), причем ось OYп ось стабилизации (ось подвеса платформы ГС); OXп, OZп стабилизированные оси, которые параллельны соответственно осям чувствительности измерителей ускорений и ориентированы так, чтобы система координат была правой;
Oxа, OZа оси чувствительности измерителей ускорений 13 и 14 соответственно;
OXг ось подвеса внутренней рамки 19 гироскопа 12, которая является также осью чувствительности измерителя угловой скорости (можно считать совпадающей с OXп);
OYг ось подвеса наружной рамки 20 гироскопа 12, которая параллельна оси стабилизации OYп ГС.
Для пояснения существа изобретения, особенностей операций способа и работы гироскопического инклинометра на фиг.1-3 приняты следующие обозначения:
ψ угол поворота оси чувствительности измерителя угловой скорости относительно корпуса СП (угол поворота платформы ГС относительно оси стабилизации) при этом соответственно:
j1 угол поворота в момент начала выставки;
ψj угол поворота, соответствующий j-му измерению, причем j=1-n;
ψг угол поворота соответствующий n-му измерению;
ψв угол поворота в момент окончания выставки;
αx азимутальный угол (азимут) оси чувствительности измерителя угловой скорости (оси платформы OXп ГС, осей чувствительности измерителей ускорений) при этом:
αx1 азимутальный угол в момент начала выставки;
αхв азимутальный угол в момент окончания выставки;
α азимут скважины (угол между проекций орта-Jуп на OXдZд и OXд);
q зенитный угол скважины;
Wзв= ΩзsinΦ вертикальная составляющая угловой скорости вращения Земли;
Ωзг= ΩзcosΦ горизонтальная составляющая угловой скорости вращения Земли;
Ωз угловая скорость вращения Земли;
Φc широта нахождения скважины;
ωдр систематическая составляющая дрейфа трехстепенного гироскопа относительно оси подвеса внутренней рамки, совпадающей с осью чувствительности измерителя угловой скорости;
ω
Существо способа определения азимута и зенитного угла скважины в соответствии с изобретением состоит в следующем. Сначала СП 1 опускают посредством лебедки 4 в устье скважины на один-два метра и достаточной точностью удерживают в вертикальном положении, при этом оси чувствительности измерителей ускорений OXа и OZа находятся в горизонтальной плоскости. Для дальнейшего пояснения способа рассмотрим последовательно два режима: начальную выставку и определение азимута и зенитного угла при движении СП в скважине.
1. Начальная выставка.
В этом режиме определяют начальное положение осей OXа, OZа и OXг в азимуте.
Так как оси OXа и OXг параллельны, а ось OZа им перпендикулярна, то достаточно провести все рассуждения относительно одной оси, например, оси OXг, которую можно считать параллельной оси OXп. Алгоритм начальной выставки основан на измерении горизонтальной составляющей угловой скорости вращения Земли в проекции на вращающуюся с постоянной угловой скоростью ось чувствительности измерителя угловой скорости. Рассмотрим основные операции режима начальной выставки.
1.1. Вращают с постоянной скоростью ωв оси чувствительности OXа, OYа и OXп, при этом измеряют и записывают в последовательных положения угол поворота оси OXг(OXп) ψj и проекцию Ωзг на ось OXп, которую обозначим ωj, (j=1-n).
1.2. Вычисляют угловую скорость вращения ωв (фиг.3)
где ψ1, ψn начальное и конечное значения угла ψj (например, ψn- ψ1 360o);
Δt время поворота на заданный угол.
1.3. Вычисляют среднее значение измеренной в n точках угловой скорости ωj которое соответствует систематической составляющей угловой скорости дрейфа
1.4. Формируют эталонную модель измеряемой угловой скорости, которая отражает физическую сторону измеряемой угловой скорости
где ωв, ω
Φx фазовый сдвиг.
Дальнейший алгоритм начальной выставки состоит в получении наилучшей оценки угла Φx, который соответствует азимутальному положению оси OXп в момент начала выставки, т.е. углу αx1.
1.5. Формируют наилучшую оценку фазовому углу Φx методом наименьших квадратов, при этом:
вычисляют разность угловых скоростей ωэj- ωj;
вычисляют оценку в виде суммы квадратов  , которая является функцией невязки;
, которая является функцией невязки;
вычисляют значение функции невязки при изменении фазового сдвига от 0 до 360o с заданным шагом, который должен быть меньше погрешности измерения азимутального угла;
выбирают наименьшую величину оценки, а значение Φx, соответствующее минимуму оценки, принимают за значение азимута оси чувствительности измерителя угловой скорости в момент начала выставки, который обозначают αx1.
1.6. Формируют азимутальный начальный угол оси чувствительности измерителя угловой скорости на момент окончания выставки (фиг.3)
αхв = ψв- ψ1 + αx1. (4)
Полученное значение αхв запоминают и используют в дальнейшем для формирования начальной матрицы ориентации.
2. Определением азимута и зенитного угла скважины (режим работы)
По времени этот режим начинается в момент начала спуска СП в скважину и продолжается все время обследования скважины.
При этом в качестве исходной информации для определения азимута и зенитного угла используется азимутальный угол αхв в момент окончания выставки и ускорения аxa и аza в проекции на гиростабилизированные оси OXа и OZа (или одно и то же, что в проекции на оси OXп и OZп). Алгоритм обработки этих сигналов базируется на применении только цифрового вычислителя и представляет модифицированный алгоритм определения параметров ориентации в классической схеме бесплатформенной инерциальной навигационной системы, когда три измерителя ускорений и три измерителя угловой скорости жестко закреплены на корпусе подвижного объекта. Формирование алгоритма ориентации, когда измеряются две проекции ускорения относительно стабилизированных осей и известно их начальное положение, составляет основную новизну предлагаемого способа, которую можно представить в виде последовательности следующих действий и операций (фиг.1 и 3).
2.1. Определение азимута и зенитного угла скважины по одному из известных алгоритмов (Исаченко В.Х. Инклинометрия скважин. М. Недра, 1987, с. 20-36).
Для этого необходимо составить матрицу направляющих косинусов матрицу ориентации В между земной OXдYдZд и связанной с осями чувствительности измерителей ускорений OXаYпZа или OXпYпZп системами координат, которая в данном случае имеет вид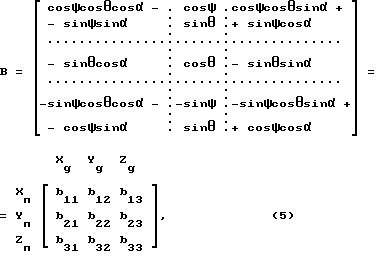
из которой α и θ можно определить, например, по формулам
Данные формулы наиболее целесообразны, так как элементы (направляющие косинусы) b12 и b32 непосредственно определяются по сигналам измерителя ускорений.
2.2. Формирование матрицы ориентации при движении СП в скважине.
Взаимное угловое перемещение систем координат OXдYдZд и OXпYпZп в конечном счете обуславливается угловой скоростью вращения Земли, угловой скоростью дрейфа гиростабилизатора (за счет угловой скорости дрейфа гироскопа) и угловыми скоростями, обусловленными искривлением траектории СП при движении его в скважине. Если известно начальное значение матрицы ориентации B, то найдя алгоритм построения приращения матрицы ориентаций ΔB, можно организовать итерационный процесс формирования матрицы ориентации. Так как способ по своей идеологии опирается на применение цифрового вычислителя, то итерационный процесс, естественно, можно связать с циклограммой работы вычислителя (с периодом дискретизации τ). Выбирая период t достаточно малым, всегда можно рассматривать формирование матрицы DB за счет конечного поворота на малый угол,
и тогда будет справедливо соотношение
Bi+1 = ΔBi+1•Bi, (7)
где i+1 текущий шаг работы вычислителя;
Bi, Bi+1 матрицы ориентации на предыдущем и текущем шагах работы вычислителя;
ΔBi+1 приращение матрицы ориентации на текущем шаге работы вычислителя, причем, на начальном шаге (i=0) B0 равняется единичной матрице E, а
где αхв = угол между осями OXд и OXп на момент окончания выставки (см. выражение (4)).
При этом следует обратить внимание на идентичность терминологии: угол между осями OXд и OXп, азимутальный угол платформы, азимутальный угол оси чувствительности измерителя угловой скорости, азимутальный угол осей чувствительности акселерометров, так как все названные оси жестко связаны со стабилизированной площадкой, которая в устройстве реализуется гиростабилизатором.
2.3. Формирование приращения матрицы ориентации на текущем шаге работы вычислителя.
При построении алгоритма исходной информацией являются сигналы измерителя ускорения по двум взаимно перпендикулярным осям, которые стабилизированы относительно оси, совпадающей с продольной осью СП. Из физических соображений и матрицы (5) следует, что ,
,
а элемент b
В основу построения алгоритма вычисления элементов матрицы ΔBi+1 положено практически оправданное предположение, что приращение матрицы ориентации обусловлено малым конечным поворотом, который определяется тремя углами ориентации θx, θy, θz, формируемыми в результате решения обратной задачи, когда известными являются соответствующие элементы матрицы ориентации и дрейф осей чувствительности измерителей ускорений, определяемый в процессе выставки (Для простоты записи в выражениях θx, θy, θz верхний индекс i+1 опущен).
где ω
Ω
b
b
b
Рассматривая углы ориентации θx, θy и θz в качестве углов поворота, которые переводят матрицу Bi в матрицу Bi+1, вычисляют соответствующую этим углам матрицу направляющих косинусов (наподобие матрицы (5)). Раскладывая в ряд Тейлора элементы этой матрицы и удерживая в разложениях члены до второго порядка малости (что всегда допустимо при соответствующем выборе времени дискретизации τ, представим полученную матрицу в виде
которая и является приращением матрицы ориентации, а углы ориентации θx, θy и θz определяются выражениями (11).
Рассмотренный выше способ определения азимута и зенитного угла скважины был реализован в гироскопическом инклинометре, работу которого рассмотрим в двух режимах, соответствующих способу. При этом СП опускают в скважину на один-два метра, выставляют продольную ось СП в вертикальное положение, подают наземное силовое питание через каротажный кабель, которое ВИП преобразует в набор напряжений, необходимых для работы ГС, сервисной электроники (усилители, генераторы для питания датчиков углов) и БЦО. Приведя ГС в рабочее состояние (набор ротором гироскопа номинальных оборотов, включение контура стабилизации), наземный вычислитель переводит СП в режим выставки. Так как БЦО работает во всех режимах, то особенности его функционирования рассмотрим после пояснения основных режимов.
1. Начальная выставка гиростабилизатора.
После приведения ГС в рабочее положение ось OXп занимает произвольное положение в азимуте. Угол, измеряемый датчиком углов 10, непрерывно изменяется как за счет дрейфа ГС, так и за счет вертикальной составляющей Ωзв. После поступления команды от наземного вычислителя 3 о начале выставки БЦО (микроЭВМ 1) формируют управляющий сигнал Uк, который через разряд Р3.0 порта Р3 и первый выход БЦО поступает на управляющий вход задатчика эталонного тока 17, с сигнального выхода которого выдается эталонное напряжение (ток) на датчик момента 22. Вектор кинетического момента  начинает прецессировать вокруг оси OYг гироскопа 12 с постоянной угловой скоростью, а контур стабилизации, состоящий из датчика угла 23, усилителя стабилизации 16, двигателя отработки 11, будет воспроизводить это движение поворотом платформы 9 (совместно с установленными на ней измерителями ускорений 13 и 14 и измерителем угловой скорости 12) вокруг оси стабилизации OYп. Такое вращение необходимо, чтобы ось чувствительности измерителя угловой скорости OXг (OXп) составляла непрерывно изменяющийся угол относительно направления на север, которое соответствует Ωзг. Вращение платформы осуществляется на заданный угол (например, 360o). В процессе вращения в дискретные моменты времени, которые соответствуют повороту платформы приблизительно на один градус, производят измерения сигналов датчика углов 10 (напряжения U
начинает прецессировать вокруг оси OYг гироскопа 12 с постоянной угловой скоростью, а контур стабилизации, состоящий из датчика угла 23, усилителя стабилизации 16, двигателя отработки 11, будет воспроизводить это движение поворотом платформы 9 (совместно с установленными на ней измерителями ускорений 13 и 14 и измерителем угловой скорости 12) вокруг оси стабилизации OYп. Такое вращение необходимо, чтобы ось чувствительности измерителя угловой скорости OXг (OXп) составляла непрерывно изменяющийся угол относительно направления на север, которое соответствует Ωзг. Вращение платформы осуществляется на заданный угол (например, 360o). В процессе вращения в дискретные моменты времени, которые соответствуют повороту платформы приблизительно на один градус, производят измерения сигналов датчика углов 10 (напряжения U
2. Определение азимута и зенитного угла скважины при движении скважинного прибора в скважине.
При переходе в режим движения СП в ГС продолжают работать контур индикаторной гироскопической стабилизации и контур измерения угловой скорости, который в данном случае выполняет роль контура электрического арретирования. Для определения азимута и зенитного угла в реальном масштабе времени начинают измеряться сигналы измерителей ускорений 13 и 14 (соответственно напряжения U3= K3аxa, U4=K4аza, где K3, K4 коэффициенты передачи), которые через БЦО (выходы 2 и 3) в последовательном коде поступают в наземный вычислитель. В соответствии с работой алгоритма ориентации в наземном вычислителе последовательно выполняются следующие действия:
вычисление части элементов матрицы ориентации на текущем шаге (9), (10);
вычисление углов ориентации θx, θy, θz на текущем шаге (11);
вычисление приращения матрицы ориентации на текущем шаге 12;
вычисление матрицы ориентации на текущем шаге 7, где приращение матрицы ориентации на момент начала движения берется из алгоритма выставки 8;
вычисление азимута и зенитного угла на текущем шаге 6.
В процессе работы СП контролируется температура внутри СП. Для чего датчик температуры 8 подключается к одному из входов БЦО и его напряжение U6= K6T, где K6 коэффициент передачи; T температура, после преобразования в параллельный код в виде последовательного кода передается в наземный вычислитель, который при превышении предельно допустимой температуры выдает соответствующее сообщение оператору. Одновременно при движении СП в наземном вычислителе записывается угол ψ, датчика углов 10, который в алгоритмах этого режима не используется, но может иметь практическую ценность, так как представляет угол поворота СП относительно оси скважины.
3. Описание работы блока цифровой обработки.
БЦО осуществляет связь ГС СП с наземным вычислителем и решает следующие задачи:
преобразование напряжений Um, m=1-6 в параллельный код, который формируется последовательно включенными двухканальными ПНЧ 29, 30, 31 и реверсивными счетчиками 32, 33, 34;
преобразование параллельного кода в последовательный код;
передачу и прием последовательного кода между микроЭВМ 1 и наземным вычислителем:
организацию обмена между СП и наземным вычислителем в соответствии с протоколом обмена типа RS-232 по последовательному каналу ввода/вывода.
Основу БЦО составляет микроЭВМ К1816 ВЕ51, у которой четыре восьмиразрядных двунаправленных порта Р0-Р3 запрограммированы следующим образом:
порты Р0 и Р2 запрограммированы на прием информации в виде параллельного кода и соединены с шиной данных (ШД);
порт Р1 организует запись информации и опрос реверсивных счетчиков, при этом разряды с Р1.0 по Р1.5 подключены к шине адреса (ША), причем каждый разряд соответствует одному адресу и связан с входами разрешения выборки CE и разрешения чтения RD соответствующих реверсивных счетчиков; разряд Р1.6 программно настроен на выдачу команду синхронизации (КСХ) и подключен к входам опроса F всех счетчиков 32, 33, 34; разряд Р1.7 программно настроен на вывод тактовой частоты (ТЧ) и подключен к входам синхронизации SYN всех ПНЧ 29, 30, 31 и всех счетчиков 32, 33, 34;
порт Р3 запрограммирован на выдачу разовой команды и организацию обмена, при этом разряд Р3.0 запрограммирован на выдачу команды "включение разворота платформы ГС", а через разряды Р3.1 и Р3.2 организован ввод/вывод последовательного кода.
Рассмотрим более подробно решение указанных задач в соответствии с электрической схемой фиг.4. Так как преобразование напряжений Um в код осуществляется одновременно по всем шести каналам, то рассмотрим работу одного из каналов, например, канала измерителя ускорения ax (напряжение U3). Напряжение U3 поступает непрерывно на вход IN1 первого канала ПНЧ 30, на вход SYN которого поступает тактовая частота микроЭВМ 27. На выходе ПНЧ формируется последовательность импульсов одинаковой длительности, частота которых пропорциональна величине входного сигнала, причем, если U3>0, то импульсы следуют с выхода +F1, если U3<0, то с выхода -F1. Одновременно на линии управления "+/-" выставляется сигнал, по которому на реверсивном счетчике 33 будет происходить либо суммирование, либо вычитание импульсов, поступающих с ПНЧ 30. В результате суммирования (вычитания) импульсов счетчик 33 фактически осуществляет операцию интегрирования входного сигнала U3. Следовательно, для получения информации о коде, соответствующем напряжению U3, в программе необходимо предусмотреть операцию масштабирования кода реверсивных счетчиков, которая состоит в делении кода счетчика на время накопления сигнала (время преобразования). Дальнейшее пояснение работы блока БЦО состоит в особенности организации обмена. При включении питания происходит инициализация однокристальной микроЭВМ (через конденсатор C формируется импульс сброса), т.е. начинает выполняться соответствующая программа, которая производит сброс соответствующих регистров, сброс ячеек памяти ОЗУ в ноль, программирование портов и регистров управления и т.п.
Первый байт команды наземной ЭВМ (формат команды: первый байт адрес устройства, второй байт код команды) через приемо-передатчик 28 и быстродействующий последовательный порт (разряды порта Р3.1 и Р3.2) поступает и записывается в соответствующий регистр микроЭВМ 27. При этом происходит прерывание и начинается его обработка. Если адрес устройства не совпадает с адресом, записанным в соответствующей ячейке памяти ПЗУ микроЭВМ 27, то обработка прерывания заканчивается и микроЭВМ 27 возвращается в исходное состояние. Если код команды не совпадает с кодом используемых в БЦО или адрес либо команда приняты с ошибкой четности, то микроЭВМ формирует ответное слово (ОС) (формат ОС) (первый байт адрес устройства, второй байт байт состояния), где в байте состояния указывает соответствующим кодом, что принята команда не моего списка, либо принят мой адрес с ошибкой четности, либо принята команда с ошибкой четности, и заканчивает обработку прерывания. В противном случае микроЭВМ 27 приступает к выполнению команды, переданной наземным вычислителем, и так же формирует ОС, где в байте состояния указывается на отсутствие ошибок обмена.
Для обеспечения работы блока БЦО необходимо четыре команды управления, а именно:
команда установить исходное состояние;
команда синхронизации;
команда управления платформой;
команда обмена.
Если принят код команды "Установить исходное состояние", то микроЭВМ 27 повторно приступает к программе инициализации, если принята команда "Управление платформой", то микроЭВМ 27 в соответствии с кодом этой команды выставляет в разряд Р3.0 порта Р3, либо логический ноль, либо логическую единицу. При этом в соответствии с фиг.2 поступает сигнал Uк на управляющий вход задатчика эталонного тока 17, который через свой сигнальный выход при помощи датчика момента 22 создаст прецессию гироскопу вокруг оси OYг. Контур индикаторной стабилизации повторяет движение гироскопа и платформа 9 также будет вращаться с заданной скоростью. Если Uк будет равняться логическому нулю, то задатчик 17 отключится от датчика моментов 22 и управляемое движение платформы 9 прекратится. Если принят код команды "Синхронизация", то микроЭВМ 27 формирует на выходе разряда Р1.6 порта Р1 импульс, который, поступая на входы опроса F реверсивных счетчиков 32, 33, 34, записывает в выходные буферные регистры счетчиков содержимое счетчиков 32, 33, 34, а затем обнуляет эти счетчики.
Если принят код команды "Обмен", то микроЭВМ 27 наряду с передачей ОС приступает к формированию пакета данных, которое происходит следующим образом: на разрядах Р1.0-Р1.5 порта Р1 (подключенного к ША счетчиков) формируется код, который разрешает поочередное подключение к портам Р0, Р2 через шину ШД буферных регистров соответствующих каналов счетчиков 32, 33, 34, и микроЭВМ 27 считывает информацию данных регистров, записывает ее в ОЗУ и поочередно формирует соответствующие данные на вход/выход приемо-передатчика 28 в виде последовательного кода. Формат пакета следующий: адрес устройства, байт состояния; младший байт первого канала счетчика 32, старший байт первого канала счетчика 32; младший байт второго канала счетчика 32, старший байт второго канала счетчика 32 и т.д. до старшего байта второго канала счетчика 34. Информация с приемо-передатчика 28 по каротажному кабелю 2 (фиг.2) поступает в наземный вычислитель 3 типа РС-486 Note Book на порт RS-232, при этом используется тот же приемо-передатчик, что и в СП 1 в блоке БЦО 6. Отличие состоит только в том, что используются стандартные буферы для согласования с уровнями RS-232.
На основе предлагаемого способа в МИП "Арас" г. Арзамас был разработан гироскопический инклинометр. В дополнение к маркам отдельных узлов скважинного прибора, указанных в перечне элементов на чертежах, ниже приводятся следующие технические характеристики.
Технические характеристики гироскопического стабилизатора
1. Гиростабилизатор работает от источника питания постоянного тока напряжением (27±2,7) В.
2. Ток, потребляемый гиростабилизатором, не превышает:
2,5 А от источника постоянного тока напряжением 27 В в течение 10 с, не более 2 А в остальное время;
3. Время готовности гиростабилизатора не более 2 мин.
4. Стабильность дрейфа в одном запуске гиростабилизатора не более 0,5 o/ч.
5. Динамическая ошибка стабилизации при действии синусоидальных колебаний не превышает:
1,5 угл. мин. относительно оси Yп;
6. Гиростабилизатор обеспечивает управление нагрузкой относительно оси Yп:
± 40 o/с в течение времени t<10 с;
± 10 o/с в течение времени t<300 с;
± 4 o/с в течение времени t<2 ч.
7. При скорости управления ± 40 o/с ток управления составляет (280±80) мА. Зависимость скорости управления от тока управления - квадратичная.
8. Рабочие углы прокачки гиростабилизатора по оси стабилизации не ограничены.
9. Габариты гиростабилизатора ⊘ 56 мм, L 500 мм.
10. Масса гиростабилизатора не более 2 кГ.
Характеристики скважинного прибора
Диапазон измерения зенитных углов, град До 70
Диапазон измерения азимутов, град 0-360
Погрешность определения в непрерывном режиме:
Зенитных углов, град 0,15
Азимутов, град 1
Глубины, м 0,1
Максимальная скорость измерения, м/ч 5000
Максимальная температура, oC 100
Максимальное давление, МПа 80
Размеры скважинного прибора, мм:
Длина 2500
Диаметр 73
Масса, кг 20
Скважинный прибор соединяется с наземным вычислителем трехжильным каротажным кабелем в металлической оплетке, причем оплетка и одна жила используются для подачи силового питания, а две другие жилы являются информационными.
Опытные образцы гироскопических инклинометров прошли испытания по определению параметров ориентации нефтяных скважин с положительными результатами в Татнефтегеофизики г. Бугульма, Томскнефтегеофизики г. Стрижевой, Томской области и Приобьнефтегеофизики г. Негань Тюменской области.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1999 |
|
RU2159331C1 |
| СПОСОБ НАЧАЛЬНОЙ АЗИМУТАЛЬНОЙ ВЫСТАВКИ СКВАЖИННОГО ПРИБОРА ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА И АЗИМУТАЛЬНЫЙ МОДУЛЬ | 2012 |
|
RU2501946C2 |
| Способ определения зенитного угла и азимута скважины и гироскопический инклинометр | 2018 |
|
RU2682087C1 |
| ИНКЛИНОМЕТР | 2003 |
|
RU2250371C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗЕНИТНОГО УГЛА И АЗИМУТА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 2012 |
|
RU2507392C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2528105C2 |
| СПОСОБ ИЗМЕРЕНИЯ ТРАЕКТОРИИ СКВАЖИНЫ ПО АЗИМУТУ И ДВУХРЕЖИМНЫЙ БЕСПЛАТФОРМЕННЫЙ ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2269001C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ | 2003 |
|
RU2250993C1 |
| ГИРОИНКЛИНОМЕТР | 1994 |
|
RU2078204C1 |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ СКВАЖИН | 1996 |
|
RU2104490C1 |
Изобретение относится к точному приборостроению и может быть использовано, например, для обследования нефтяных, газовых и геофизических скважин путем движения скважинного прибора в скважине в непрерывном или точечном режиме, при определении азимута и зенитного угла скважины. Попутно измеряется температура внутри скважинного прибора и угол поворота его корпуса относительно оси скважины. Сущность изобретения: основу способа и инклинометра составляет гироскопический стабилизатор, на платформе которого жестко укреплены измерители ускорений и измеритель угловой скорости на основе трехстепенного гироскопа. В режиме выставки платформу вращают с постоянной угловой скоростью и по обработке сигнала измерителя угловой скорости определяют начальную ориентацию осей чувствительности измерителей ускорений в азимуте. При движении скважинного прибора для определения азимута и зенитного угла записывают сигналы измерителей ускорений, на основе которых на каждом шаге работы вычислителя формируют матрицу ориентации в виде произведения приращения матрицы ориентации на матрицу ориентации на предыдущем шаге. Построение матрицы ориентации осуществляют как функцию углов ориентации, которые определяются на каждом шаге по сигналу измерителей ускорений. Для преобразования и передачи информации служит блок цифровой обработки, который по каждому аналоговому входу состоит из последовательно соединенных преобразователей напряжение - частота и реверсивных счетчиков, а по цифровому входу/выходу имеет приемо-передатчик последовательного кода, а управление блоком цифровой обработки осуществляет встроенная однокристальная микроЭВМ с четырьмя программируемыми двунаправленными портами. 2 с. и 3 з.п.ф-лы, 4 ил.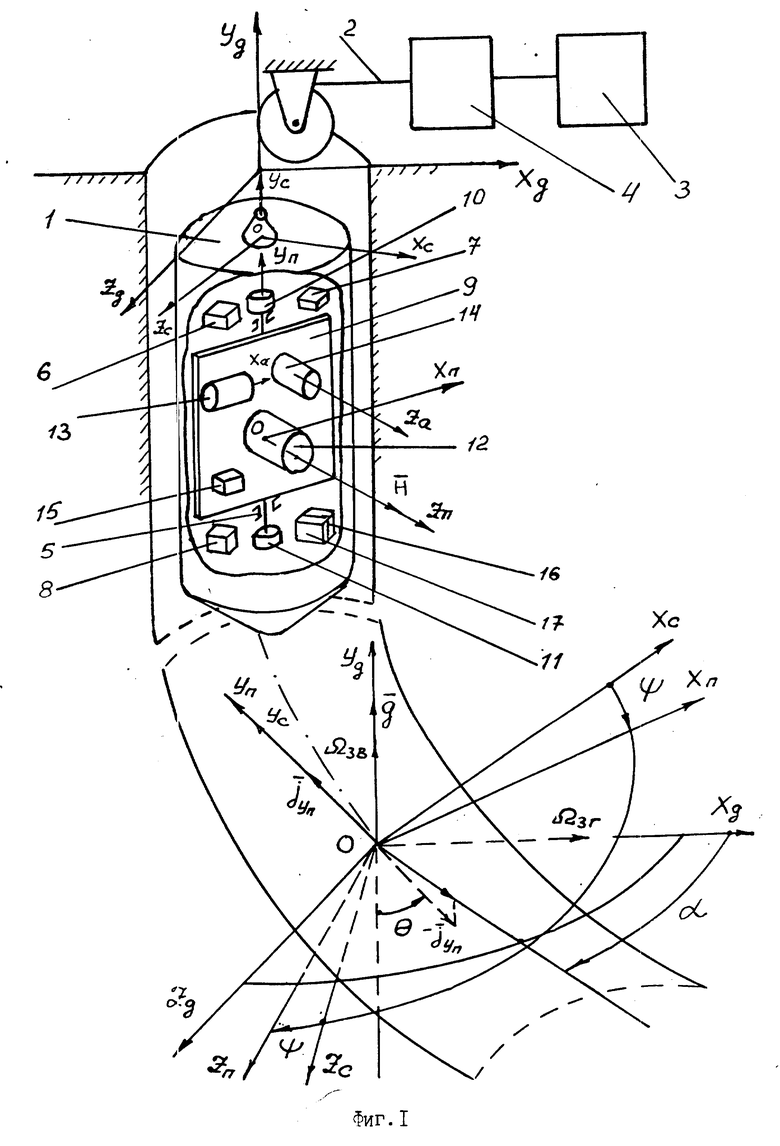
где i + 1 текущий шаг работы вычислителя;
b
Bi+1 = ΔBi+1•Bi,
где Bi, Bi + 1 матрицы ориентации на предыдущем и текущем шагах работы вычислителя;
приращение матрицы ориентации, элементы которой определяют в зависимости от углов ориентации Qx, Qy, Qz по формулам
где ω
Ω
элементы матрицы ориентации, формируемые по результатам измерения проекций a
τ - период дискретизации работы вычислителя, причем начальное значение матрицы ориентации равно
где αxв - азимутальный угол осей чувствительности измерителей ускорений в момент окончания выставки.
ωэj = ω
где j номер измерения;
Φx - фазовый сдвиг,
и для оценки фазового сдвига вычисляют функцию невязки, представляющую сумму квадратов разности эталонной ωэj и измеренной ωj угловых скоростей на всем наборе измерений, которую минимизируют по фазовому сдвигу, а азимутальный угол осей чувствительности измерителей ускорений в момент окончания выставки определяют по формуле
αxв = ψв- ψ1+ αx1,
где ψ1, ψв - угол поворота осей чувствительности измерителей ускорений относительно корпуса скважинного прибора вокруг оси стабилизации в моменты начала и окончания выставки;
αx1 - азимутальный угол осей чувствительности измерителей ускорений в момент начала выставки, который равен фазовому сдвигу Φx минимизирующему функцию невязки.
| RU, патент, 2004786, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
