Настоящее изобретение относится к судостроению, а более конкретно к безопасной эксплуатации скоростных, в основном, глиссирующих судов на мелководье. Знание диапазона безопасных скоростей движения скоростных глиссирующих судов на мелководье особенно важно при их эксплуатации в мелководных районах морей, а также при совершении десантными кораблями посадочно-высадочных операций в прибрежных районах морей, озер и водоемов.
Влияние мелководья на гидродинамические характеристики глиссирующих и водоизмещающих судов исследовано и описано в литературе, но только по отношению к сопротивлению движения, влияющему на скоростные характеристики судов.
Так, например, это изложено в параграфах:
- §2.7.1 "Влияние мелководья на сопротивление…" в книге под редакцией В.Г.Павленко "Ходкость и управляемость судов", изд. "Транспорт", Москва, 1991 г.;
- §40 "Дополнительное сопротивление при движении судна по ограниченному фарватеру". М.Я.Алферъев. "Ходкость и управляемость судов. Сопротивление воды движению судов", изд. "Транспорт", Москва, 1967 г.
Однако при движении на мелководье близость дна приводит к изменению углов ходового дифферента и осадки судна. Причем диапазоны и величины их изменения находятся в функциональной зависимости от скорости движения. Эти явления приводят к изменению отстояния нижней точки судна (а это могут быть винты, рули, водозаборники водометов и т.п.) от дна водоема, и, как следствие, касание его этими частями судна, что может привести к их поломке, а в некоторых случаях к невозможности продолжения движения. Влияние мелководья на ориентацию судна относительно дна водоема является сложной функцией от водоизмещения и обводов днищевой части корпуса, положения центра тяжести по длине судна и скорости движения. Аналитическое решение этой проблемы из-за сложностей математического выражения происходящих процессов при движении скоростных судов на мелководье дает результаты, уровень точности которых не позволяет использовать их при выполнении практических задач. Что касается экспериментального метода решения, то нам он неизвестен.
Поэтому с целью определения влияния на параметры движения модели мелководья необходимо воспроизвести этот процесс с учетом технических возможностей опытового бассейна и его контрольно-измерительной аппаратуры, используя динамически-подобную буксируемую модель, моментно-инерционные и силовые характеристики которой моделируют исследуемое скоростное судно, и провести испытания в опытовом бассейне в условиях спокойной поверхности воды.
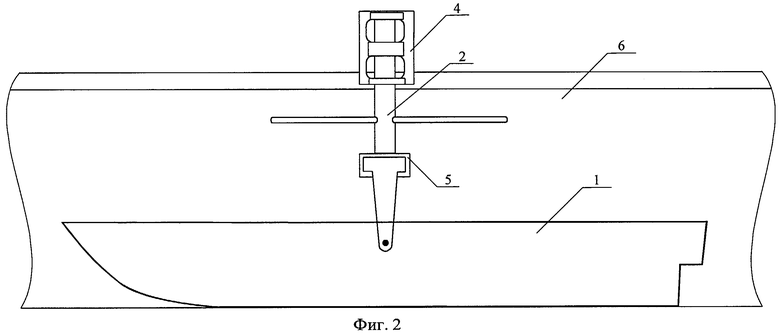
Для этого используется маломасштабная буксируемая модель (1) (см. фиг.1, 2, 8, 9) скоростного судна, которая раскрепляется на пилоне (2) буксировочной тележки (3) опытового бассейна таким образом, что имеет возможность свободного перемещения по высоте и дифференту, величины которых фиксируются расположенными на модели и пилоне реостатными датчиками вертикальных (4) и угловых перемещений (5).
В чаше (6) опытового бассейна с помощью горизонтального щита-экрана (7), устанавливаемого на вертикальных опорах (8), имитируется, более чем на 50% длины бассейна, мелководье.
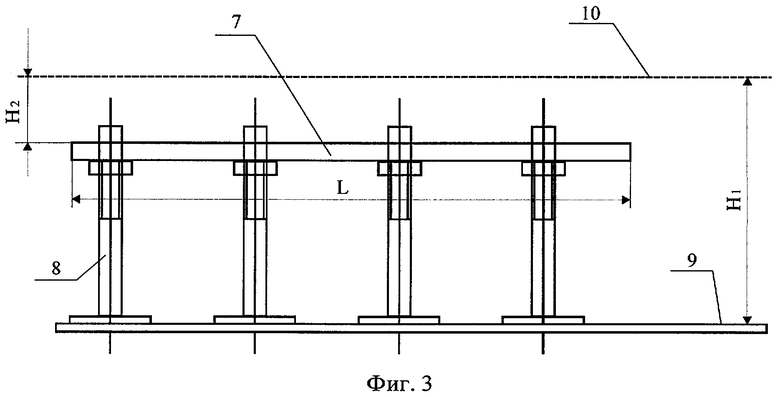
Предлагаемая схема установки горизонтального щита-экрана и его регулировка представлены на фиг.3, где
9 - дно чаши опытового бассейна;
10 - уровень воды;
7 - горизонтальный щит-экран;
8 - вертикальные опоры, регулирующие положение экрана относительно уровня воды.
Предлагаемый способ экспериментальной оценки влияния на параметры движения модели мелководья реализуется следующим образом.
Буксируемая модель скоростного глиссирующего судна с заданными параметрами по водоизмещению и положению центра масс разгоняется буксировочной тележкой на глубокой воде до заданной скорости. С этими параметрами модель выходит на мелководный участок, глубина которого устанавливается и фиксируется горизонтальным щитом-экраном с помощью регулирующих вертикальных стоек. При этом из-за влияния мелководья меняется положение модели (центр тяжести) по высоте и дифференту относительно этих же параметров на глубокой воде.
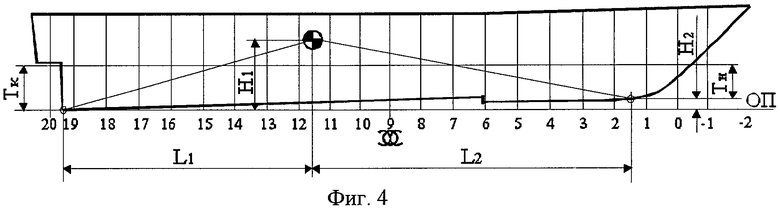
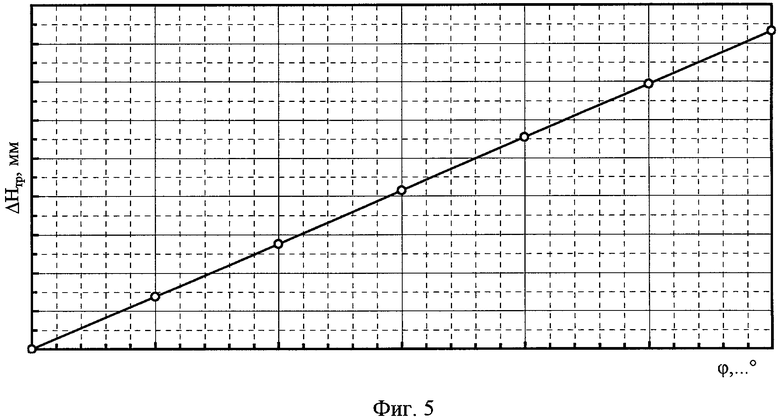
По изменению положения модели по высоте и дифференту с помощью схемы расположения крайних нижних точек корпуса (фиг.4) и графиков изменения осадок на транце (фиг.5) и в носу (фиг.6) строится результирующий график зависимости крайней нижней точки корпуса при движении на мелководье (фиг.7). Такие опыты проводятся при разных водоизмещениях, положениях центра масс и глубинах в эксплуатационном диапазоне скоростей движения.
Затем при известных глубинах в районе эксплуатации судов или при высадке десанта в прибрежных зонах с учетом допустимых глубин при движении на мелководье определяются диапазоны безопасных скоростей, позволяющие избежать соприкосновение корпуса судна и отдельных его элементов с дном водоемов, а также вводить скоростные ограничения в инструкции по управлению судами.
При движении модели с глубокой воды на мелководье измеряется изменение осадки и угла дифферента, что позволяет экспериментально-расчетным способом определять характер изменения положения нижней точки корпуса модели на скорости и при известных допустимых для судна глубинах движения на мелководье оценивать зоны безопасных скоростей движения, являющихся одним из основных элементов инструкции по управлению судами в прибрежных районах на урезах воды и на мелководье.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЫСТРОХОДНОЕ СУДНО | 2011 |
|
RU2488510C2 |
| Корпус высокоскоростного катера (глиссирующего судна) с улучшенными ходовыми качествами | 2022 |
|
RU2827118C2 |
| СКОРОСТНОЕ ГЛИССИРУЮЩЕЕ СУДНО | 2008 |
|
RU2387569C2 |
| ОПЫТОВЫЙ БАССЕЙН ДЛЯ ИСПЫТАНИЙ МОДЕЛЕЙ СУДОВ ПРЕИМУЩЕСТВЕННО ВО ЛЬДАХ | 2007 |
|
RU2352493C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ДВИЖЕНИЯ СУДОВ | 2000 |
|
RU2225314C2 |
| Способ проведения буксировочных испытаний моделей судов на мелководье | 1983 |
|
SU1115960A1 |
| УНИВЕРСАЛЬНОЕ ТРАНСПОРТНОЕ СУДНО | 2015 |
|
RU2603709C1 |
| СУДНО НА ВОЗДУШНОЙ КАВЕРНЕ С ВОДОМЕТНЫМ ДВИЖИТЕЛЕМ | 2008 |
|
RU2381131C1 |
| УСТРОЙСТВО ДЛЯ ГИДРОДИНАМИЧЕСКИХ ИСПЫТАНИЙ МОДЕЛИ НАДВОДНОГО СУДНА | 2008 |
|
RU2381473C1 |
| УСТРОЙСТВО ДЛЯ ПРОВЕДЕНИЯ ГИДРОДИНАМИЧЕСКИХ ИСПЫТАНИЙ В ОПЫТОВОМ БАССЕЙНЕ МОДЕЛЕЙ БЫСТРОХОДНЫХ СУДОВ С ВОЗДУШНОЙ КАВЕРНОЙ | 2013 |
|
RU2535384C1 |
Настоящее изобретение относится к судостроению и относится к технологии обеспечения безопасной эксплуатации на мелководье скоростных, в основном, глиссирующих судов. Способ определения безопасного диапазона эксплуатационных скоростей глиссирующего скоростного судна при движении на мелководье заключается в экспериментальной отработке в опытовом бассейне гидродинамических характеристик динамически-подобной маломасштабной буксируемой модели судна на искусственно созданной с помощью подводного экрана малой глубине с замером параметров движения модели. При движении модели с глубокой воды на мелководье измеряют изменение осадки и угла дифферента. Это позволяет экспериментально-расчетным способом определять характер изменения положения нижней точки корпуса модели на скорости и при известных допустимых для судна глубинах движения на мелководье оценивать зоны безопасных скоростей движения, являющихся одним из основных элементов инструкции по управлению судами в прибрежных районах на урезах воды и на мелководье. Изобретение позволяет определять безопасные скорости движения модели судна с глубокой воды на мелководье. 9 ил.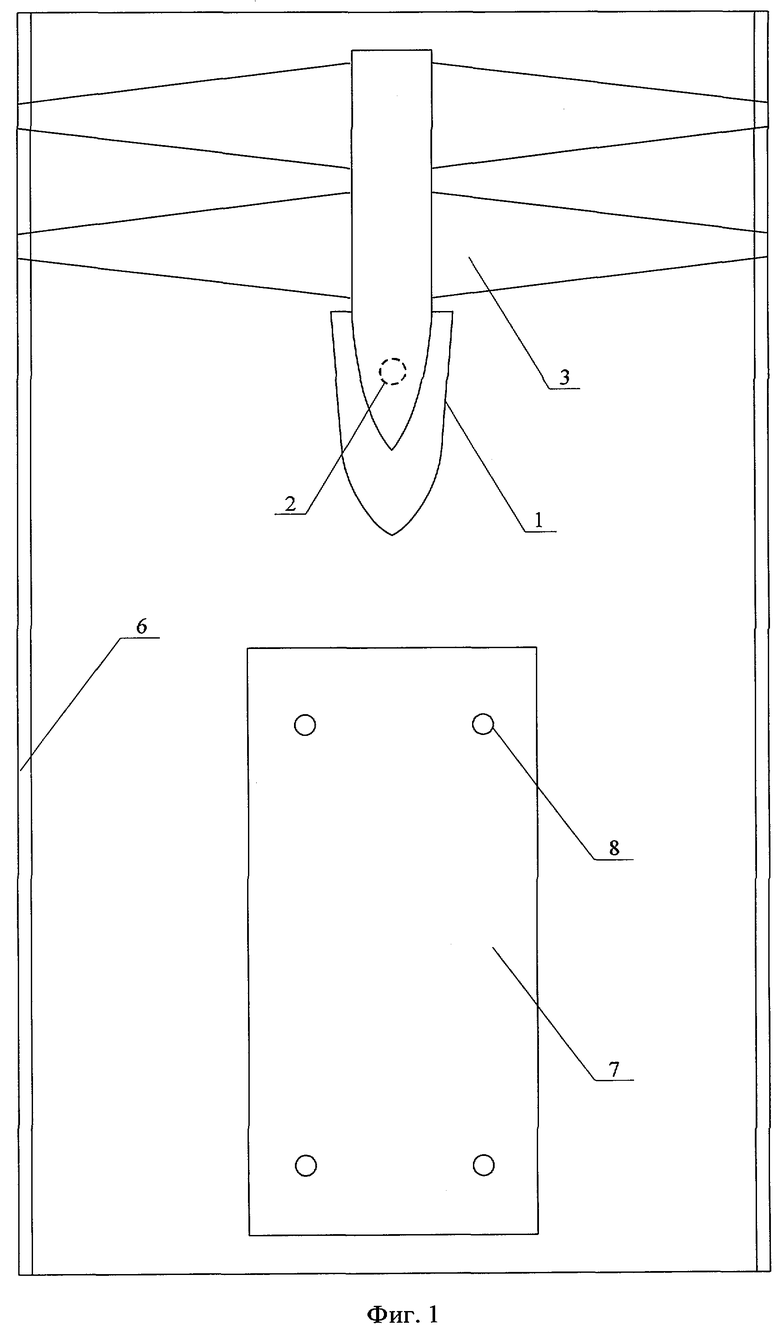
Способ определения безопасного диапазона эксплуатационных скоростей глиссирующего скоростного судна при движении на мелководье, заключающийся в экспериментальной отработке в опытовом бассейне гидродинамических характеристик динамически-подобной маломасштабной буксируемой модели судна на искусственно созданной с помощью подводного экрана малой глубине с замером параметров движения модели, отличающийся тем, что при движении модели с глубокой воды на мелководье измеряется изменение осадки и угла дифферента, что позволяет экспериментально-расчетным способом определять характер изменения положения нижней точки корпуса модели на скорости и при известных допустимых для судна глубинах движения на мелководье оценивать зоны безопасных скоростей движения, являющихся одним из основных элементов инструкции по управлению судами в прибрежных районах на урезах воды и на мелководье.
| JP 2000205996 А, 28.07.2008 | |||
| СПОСОБ КОНТРОЛЯ МОРЕХОДНОСТИ СУДНА | 1998 |
|
RU2147540C1 |
| JP 61066842 A, 05.04.1986 | |||
| Адаптивная система управления электромеханическим устройством торможения колеса | 2016 |
|
RU2643305C1 |

