Изобретение относится к судостроению и касается динамических характеристик движения судов на стадии проектирования. Методы определения характеристик сопротивления и мореходности судов, к которым относятся также линейные ускорения (перегрузки) и углы качки, описаны в литературе, например в Косоуров К. Ф. Теоретические основы гидроавиации. - М., ВИМО, 1961, с.438-454, 546-552; Зайцев Н. А., Маскалик А.И. Отечественные суда на подводных крыльях. - Л.: Судостроение, 1967, с.92-99; Основы теории судов на воздушной подушке. - Л. : Судостроение, 1970, с.446-448, и используются в проектировании. Эти методы заключаются в изготовлении динамически подобных моделей судна в некотором масштабе, снабжении этой модели измерительной системой для записи сопротивления, вертикальных перемещений и угла дифферента и испытанию этих моделей в опытовом бассейне. Способы крепления модели к тележкам опытового бассейна приводит к сложности обеспечения подобия модели по массам и моментам инерции из-за включения в динамическую систему деталей подвески модели и разгрузки (статической) до требуемой массы. Особенно сложно обеспечить подобие для скоростных судов, имеющих устройства автоматического управления движением и разгонными или снижающими сопротивления. В этих случаях получить динамическое подобие невозможно, и модель с разгрузкой по массе используется только для определения статических характеристик движения: сопротивления движению, подъемной силы, посадки (осадки) и угла дифферента. Поэтому для определения динамических характеристик движения - ускорений и углов качки - изготавливается еще одна модель с максимально возможным подобием по массам и моментам инерции (но без различных устройств), которая подвергается испытаниям путем буксировки за носовую часть в опытовом бассейне или на открытой воде за катером. Эта модель дает возможность определить динамические характеристики с точностью, зависящей от точности воспроизведения масс и моментов инерции и неточностей, вносимых буксировкой за носовую часть (вместо приложения сил, иммитирующих тягу и приложенных к движителям). Таким образом, на одной модели определяют статические характеристики движения, а на другой динамические характеристики. Буксируемую модель для обеспечения подобия по массе и моментам инерции приходится выполнять упрощенную без моделированных устройств систем автоматического управления или систем снижения сопротивления и др., что также влияет на точность определения динамических характеристик движения. Динамические характеристики движения необходимы для оценки возможностей проектируемого судна по перевозке пассажиров, самочувствию (работоспособности) экипажа, сохранности грузов, использованию оружия, а также для определения внешних нагрузок для расчетов прочности. Поэтому неадекватное определение динамических характеристик приводит к неправильной оценке возможностей проектируемого судна и негативным последствиям в эксплуатации. Существующие в настоящее время усовершенствования, касающиеся испытаний моделей судов в опытовых бассейнах, направлены в основном на компенсацию избыточной массы модели и устройства крепления.
Например А.С. 1541109 - предусматривает компенсацию избыточной массы за счет создания электромагнитных сил,
А. С. 1740240 - предусматривает создание демпфирующих сил при вертикальных колебаниях модели,
А.С. 140787 - предусматривает компенсацию массы пилона (подвески),
А.С. 1579841 для определения силы удара используется модель из двух частей, соединенных упругим элементом, что позволяет оценить динамическую силу удара в носовую часть.
Все вышеописанные способы не позволяют решить основную задачу - определить динамические характеристики движения на моделях геометрически подобных, но не имеющих подобия по массово-инерционным характеристикам. Задачей настоящего изобретения является разработка возможностей получения динамических характеристик движения судна, на тех же моделях, которые служат для определения статических характеристик.
Технический результат от использования предлагаемого изобретения будет заключаться в:
1. Точном определении динамических характеристик движения.
2. Динамические характеристики будут определяться на моделях, на которых сейчас определяются только статические характеристики.
3. Отпадает необходимость в создании специальных динамически подобных (но упрощенных) моделей и их испытаний.
4. Полученные результаты могут быть использованы для определения внешних нагрузок для расчетов прочности и исключить создание и испытание упругоподобной модели.
Указанный результат достигается тем, что геометрически подобная модель, не подобная по массе и моментам инерции масс испытывается в опытовом бассейне при различных степенях волнения. Перед испытаниями для модели определяют экспериментально массу с учетом всех устройств подвески модели, участвующих в вертикальном движении вместе с моделью, и момент инерции массы модели относительно шарнира крепления модели к подвеске (mм, Iм). При установке модели (подвеске) на тележку модель разгружается до расчетной массы любым применяемым в настоящее время способом. При движении на волнении сила удара является функцией высоты волны, скорости соударения и обводов судна Pуд = f(Vc,α,β,γ,hв,...) и не зависит в начальный момент от массовоинерционных характеристик.
Реакция же модели на удар, а - ускорение, ϕ - угол дифферента и т.д. зависит от силы удара и массовых характеристик. Для скоростных судов [и для судов большого водоизмещения на малом волнении] время соударения меньше полупериода I тона изгибных вертикальных колебаний и в этом случае силу удара можно заменить импульсом удара
а применительно к угловым движениям импульсу момента
Эти импульсы связаны с экспериментальными значениями реакции модели по формулам
Sм = mмρoZ
здесь mм - масса модели;
ρo - круговая частота процесса колебаний модели под действием импульса силы;
Z - максимальное вертикальное перемещение модели.
Аналогичная формула получена для импульса момента
здесь Iм - модель инерции массы модели;
ϕ - максимальный угол дифферента; - круговая частота угловых колебаний модели.
- круговая частота угловых колебаний модели.
Моделирование в опытовых бассейнах ведется по критерию Фруда и тогда значение импульса силы и момента для судна будет:
Sc=m3,5Sм
Mс=m4,5Мм
где m - масштаб натурного судна по отношению к модели.
Для определения динамических реакций натурного судна рассматривается колебательная система состоящая из масс, жесткостей и демпферов при вертикальных колебаниях и приведенным к ним угловых и в случае необходимости и изгибных колебаний I тона.
Путем расчета этой системы на действия импульса силы (или импульса силы эквивалентного импульсу момента) определяются все необходимые реакции судна при движении на волнении.
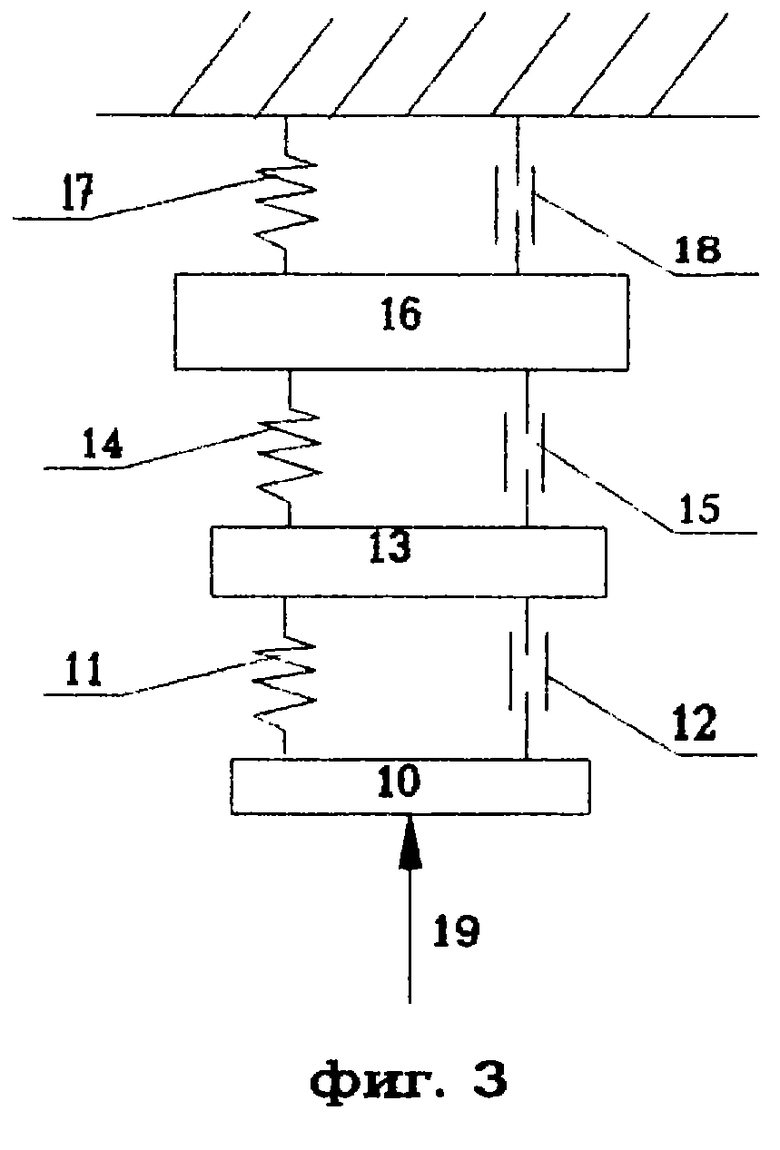
Предлагаемый способ иллюстрируется чертежами, где на фиг.1 изображена типовая подвеска модели на тележке опытового бассейна, на фиг.2 - вид записи при испытании модели на волнении, на фиг.3 - принципиальная схема динамической модели судна.
Модель 1 снабжена всеми видами устройств, например САУД, системой снижения сопротивления, системой разгрузки и с помощью шарнира 2 крепится к пилону 3, который может совершать только вертикальное движение за счет движения в направляющих 4, к верхней части пилона крепится устройство для статической компенсации избыточной массы модели и пилона 5 (которые могут быть и другого конструктивного исполнения).
На модели устанавливается гировертикаль 6 измеряющая углы дифферента и на тележке датчик вертикальных перемещений пилона 7. Образец реальной записи датчиков изображен на фиг.2, где имеется запись вертикальных перемещений 8 и угловых перемещений 9.
На фиг.3 изображена динамическая система судна:
где 10 - масса судна;
11 - эквивалентная жесткость судна при вертикальных колебаниях;
12 - демпфирование судна при вертикальных колебаниях;
13, 14, 15 - те же характеристики судна, приведенные к сечению, где действует ударная нагрузка;
16, 17, 18 - те же характеристики, но при колебаниях судна по I тону изгибных колебаний;
19 - импульс силы действующий на судно.
Таким образом, при использовании предложенного способа возможно получить динамические характеристики движения судна на волнении при испытании геометрически подобной, но не подобной по массово-инерционным характеристикам модели в опытовом бассейне и использовать полученные результаты для оценки мореходных качеств судна и его прочности.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА ДЛЯ БУКСИРОВОЧНЫХ ИСПЫТАМ№» МОДЕЛИ СУДНА В ОПЫТОВОМ БАССЕЙНЕ | 1971 |
|
SU311805A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ БЕЗОПАСНЫХ СКОРОСТЕЙ ДВИЖЕНИЯ СКОРОСТНОГО СУДНА НА МЕЛКОВОДЬЕ | 2009 |
|
RU2421368C2 |
| Способ идентификации тензора присоединенных моментов инерции тела и устройство для его осуществления | 2018 |
|
RU2688964C1 |
| СПОСОБ ИСПЫТАНИЙ МОДЕЛИ МОРСКОГО ИНЖЕНЕРНОГО СООРУЖЕНИЯ В ЛЕДОВОМ ОПЫТОВОМ БАССЕЙНЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2279654C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ФОРМЫ НОСОВОЙ ОКОНЕЧНОСТИ КОРПУСА СУДНА | 2021 |
|
RU2765518C1 |
| Устройство для имитации движения судна при испытаниях в опытовом бассейне | 1987 |
|
SU1541109A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1972 |
|
SU338908A1 |
| УНИВЕРСАЛЬНОЕ ТРАНСПОРТНОЕ СУДНО | 2015 |
|
RU2603709C1 |
| Способ испытания моделей судов ледового плавания в опытовом бассейне с искусственным льдом | 1949 |
|
SU441190A1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2021 |
|
RU2759068C1 |

Изобретение относится к судостроению и касается технологии получения динамических характеристик движения судов на стадии проектирования. Способ определения динамических характеристик движения судна на волнении в опытовых бассейнах состоит в использовании геометрически подобной, но динамически не подобной модели судна с известными массово-инерционными характеристиками. По характеристикам модели и ее кинематическим реакциям при испытаниях определяют импульс силы Sм модели судна и импульс момента силы Мм. Полученные импульсы переводят с помощью геометрического подобия в импульс силы Sc для судна и импульс момента силы Мс для судна соответственно по формулам Sc=m3,5Sм и Мс=m4,5Мм, где m - масштаб натурного судна по отношению к его модели. Затем для определения динамических реакций судна рассматривают колебательную систему из масс, жесткостей и демпферов судна, соответствующих рассматриваемым колебаниям, и путем расчета этой системы на действия импульсов силы и момента силы определяют все необходимые реакции судна при движении на волнении. Технический результат реализации изобретения заключается в точном определении динамических характеристик движения судна, в возможности их определения на моделях, на которых прежде определяли только статические характеристики, и в упрощении определения динамических характеристик движения судна путем исключения создания специальных динамически подобных (но упрощенных) моделей и их испытаний. 3 ил.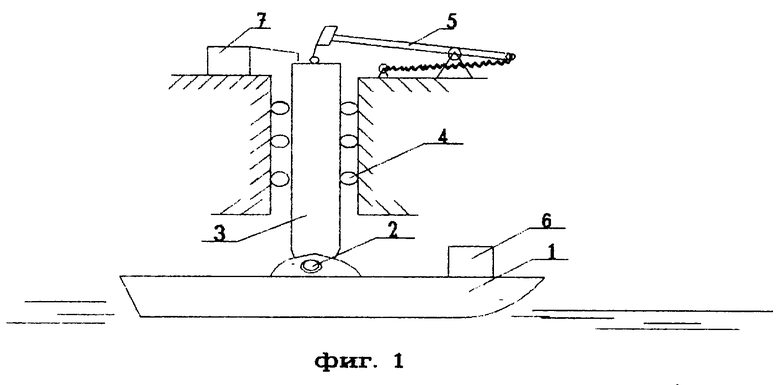
Способ определения динамических характеристик движения судна на волнении в опытовых бассейнах, использующий геометрически подобную, но динамически неподобную модель судна с известными массово-инерционными характеристиками, отличающийся тем, что по характеристикам модели и ее кинематическим реакциям при испытаниях определяют импульс силы Sм модели судна и импульс момента силы Мм, полученные импульсы переводят с помощью геометрического подобия в импульс силы Sc для судна и импульс момента силы Мс для судна соответственно по формулам
Sc=m3,5 Sм
и Мс=m4,5 Мм,
где m - масштаб натурного судна по отношению к его модели,
а затем для определения динамических реакций судна рассматривают колебательную систему из масс, жесткостей и демпферов судна, соответствующих рассматриваемым колебаниям, и путем расчета этой системы на действия импульсов силы и момента силы определяют все необходимые реакции судна при движении на волнении.
| Установка для определения гидродинамических характеристик тела | 1989 |
|
SU1638583A1 |
| ДИНАМОМЕТР БУКСИРОВОЧНОЙ ТЕЛЕЖКИ | 1993 |
|
RU2104206C1 |
| US 3052120 А, 04.09.1962. | |||

