Изобретение относится к устройствам, использующимся при навигации летательных аппаратов, при измерении ускорения.
Известен способ пневматического частотного преобразования ускорения движения тела в скорость и устройство для его осуществления, по которому ускорение инерционной массы преобразуют в давление и усиливают, при этом используют аналоговую отрицательную обратную связь по ускорению, которую суммируют с входным давлением, а выходное давление преобразуют в частоту и подают на счетное устройство (RU 2421734, C1, 20.06.2011). Указанный способ принят на прототип.
Недостатком известного способа является то, что по нему в исходной части цепи, измеряющей ускорение, обратная связь охватывает только сумматор и усилитель, что не позволяет держать под контролем и частотную часть цепи измерения, а также преобразование давления в частоту с помощью струйного генератора, который имеет нелинейную (квадратичную) зависимость, и система требует дальнейшей линеаризации.
Техническим результатом является повышение достоверности (уменьшения погрешности) за счет включения в прямую цепь интегратора, линеаризующего выходную характеристику системы измерения, и эффективности измерения путем включения в цепь обратной связи частотной части измерения.
Технический результат достигается с помощью способа пневматического частотного измерения ускорения движения тела, по которому ускорение инерционной массы преобразуют во входное давление, усиливают, при этом используют аналоговую отрицательную обратную связь по ускорению, сигнал которой суммируют с входным давлением, выходное давление преобразуют в частоту и подают на счетное устройство. По обратной связи подают выходной частотный сигнал, который преобразуют в частоту импульсов постоянной длительности и постоянной амплитуды, преобразуют импульсный сигнал в аналоговой сигнал давления обратной связи для последующего суммирования и интегрируют сигнал в прямой цепи перед нелинейным элементом, выпрямляя выходную характеристику системы.
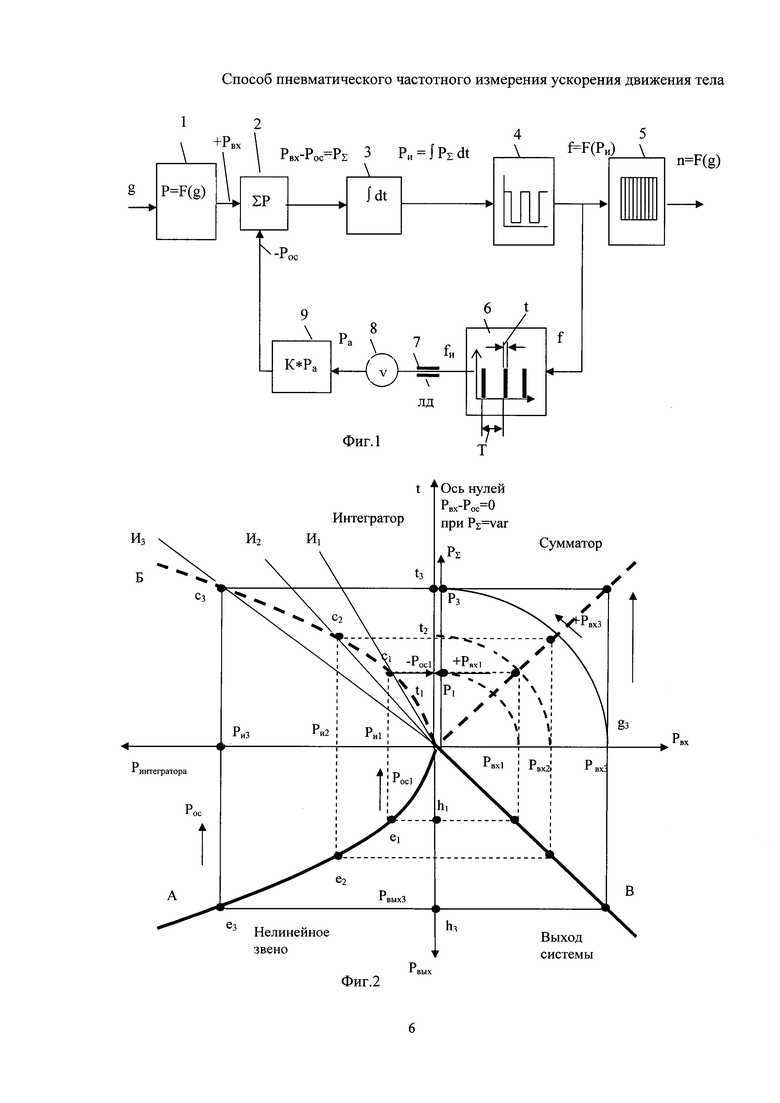
На фиг. 1 представлена общая схема измерения ускорения. На фиг. 2 показана диаграмма обработки измерения.
На общей схеме измерения ускорения показано: 1 - преобразователь ускорения инерционной массы в пневматическое давление, подаваемое в систему измерения как входной сигнал; 2 - сумматор входного сигнала и сигнала отрицательной обратной связи; 3 - пневматический интегратор; 4 - преобразователь давления в частоту пневматических импульсов, например струйный генератор как нелинейное звено; 5 - выходное счетное устройство; 6 - пневматический преобразователь, формирующий импульсы постоянной длительности и постоянной амплитуды; 7 - линейный дроссель ЛД, 8 - пневмоемкость V; 9 - усилитель давления.
На фиг. 2 показана диаграмма последовательной работы замкнутой схемы измерения с участием интегрирующего звена в графическом варианте в четырех координатах для исследования влияния сигнала обратной связи при линеаризации нелинейного элемента. Диаграмма имеет четыре квадранта: квадрант сумматора, в котором расположена зависимость ΡΣ=Рвх-Рос; квадрант интегратора с функцией  ; квадрант нелинейного звена с функцией, в данном случае Ρвых=Ри 0,5; квадрант выходного сигнала Рвых как функция входного сигнала Рвх (g) в систему измерения.
; квадрант нелинейного звена с функцией, в данном случае Ρвых=Ри 0,5; квадрант выходного сигнала Рвых как функция входного сигнала Рвх (g) в систему измерения.
Предложенный способ работает следующим образом (фиг. 1).
При возникновении ускорения g на выходе преобразователя 1 появляется соответствующее ему давление, которое поступает на плюсовой вход сумматора 2 системы. На минусовой вход сумматора поступает сигнал отрицательной обратной связи Рос с выхода системы. Из сумматора сигнал ΡΣ=Рвх-Рос следует через интегратор 3 (выходное давление Ри) и преобразователь 4 давления Ри в частотный сигнал f на выходное счетное устройство 5 системы и одновременно на цепочку обратной связи, состоящей из элементов 6, 7, 8, 9. В цепочке обратной связи частотный сигнал f перерабатывается в аналоговое давление Рос с помощью перечисленных звеньев. В преобразователе 6 частотный сигнал преобразовывается в частотно-импульсный сигнал, импульсы которого имеют постоянную длительность и амплитуду. В пневмоемкости 8 величиной V и линейном дросселе ЛД вырабатывается аналоговая величина давления Ра, которая после усилителя 9 в виде сигнала обратной связи Рос далее подается на отрицательный вход сумматора 2.
При этом на выходе интегратора 3 вырабатывается сигнал (в силу замкнутости системы), по форме адекватно отображающий характеристику нелинейного звена 4, который линеаризует общую характеристику системы.
На фиг. 2 представлена диаграмма, поясняющая работу системы с интегратором перед нелинейным звеном, на которой показано: кривая А - характеристика нелинейного звена системы, кривая Б - выходная характеристика интегратора, линия В - выходная характеристика системы, линейно-пропорциональная входному сигналу системы.
Наклонные линии И1, И2, И3 … - это пути, по которым накапливается в интеграторе его выходной сигнал при различных уровнях сигнала на его входе, а пунктирная линия между точками с1, с2, с3 … - это изменение выходного сигнала интегратора, имеющее нелинейный характер, адекватно отражающий функцию нелинейного звена.
В систему подается входной сигнал, например Ρвх1 (по оси Рвх, фиг. 2), он попадает на плюсовой вход сумматора 2 по фиг. 1 и на ось нулей сумматора по фиг. 2, и в интеграторе 2 начнется накопление входного сигнала PΣ по наклонной линии 1 и изменение величины выходного сигнала Рвых1 системы, которое воздействует через нелинейный элемент 4 и по обратной связи (элементы 6, 7, 8) через усилитель 9 на отрицательный вход сумматора величиной «-Рос1». Это изменение сигналов (фиг. 2) продолжается до тех пор, пока через определенное время t1 (ось t) на отрицательном входе сумматора сигнал - Рос1 не достигнет величины, равной Ρвх1 (на оси нулей сумматора). В результате их разность обратится в ноль (Рвх1-Рос1=0) и интегратор прекратит накопление своего выходного сигнала по наклонной линии 1 в точке с1. При этом фиксируется в точке с1 выходной сигнал Ри1 интегратора пропорционально времени интегрирования t1.
Двойная линия, разделяющая квадранты интегратора и сумматора (фиг. 2), совмещает две оси (левая ось - ось времени, правая ось - ось значений выходных величин интегратора), поскольку значения выходных величин интегратора Ри1, Ри2, Ри3 пропорциональны времени интегрирования t.
Для различных значений входного сигнала Ρрх1, Рвх2, Рвх3 … интегратор таким образом вырабатывает свои выходные сигналы Ρ1и, Р2и, Р3и … (точки с1, с2, с3 …), создавая свою выходную характеристику Б, соответствующую характеристике нелинейного звена А. Из нелинейного звена сигнал из точки е1 поступает на выход системы, проецируясь на ось Ρвых (точка h1) и на обратную связь, проецируясь далее через точки е1 и с1 к точке Р1 (на ось нулей сумматора).
Таким образом, каждому значению входной величины Рвх соответствует пропорциональное значение выходной величины Рвых, в совокупности образующие линейную выходную характеристику системы (линия В).
В итоге, предложенный способ пневматического измерения ускорения движения тела обеспечивает более высокую достоверность и эффективность измерения, за счет включения в прямую цепь интегратора 3, линеаризующего выходную характеристику системы, и включения в цепь обратной связи частотной части измерения пневматическим преобразователем 6.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство преобразования давления в пропорциональную частоту | 2021 |
|
RU2772700C1 |
| СПОСОБ И УСТРОЙСТВА КОРРЕКЦИИ И ОГРАНИЧЕНИЯ РЕВЕРСИВНОЙ РАДИОСВЯЗИ И МОЩНОСТИ ПЕРЕДАЧИ В РАДИОТЕЛЕФОННОЙ СИСТЕМЕ | 1995 |
|
RU2134018C1 |
| ИНТЕГРИРУЮЩИЙ АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 2011 |
|
RU2449470C1 |
| АКСЕЛЕРОМЕТР | 2013 |
|
RU2541716C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА РЕАКТИВНОЙ ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ И ПИД-РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ СИЛЬНОГО ДЕЙСТВИЯ | 2021 |
|
RU2781087C1 |
| МНОГОЗОННЫЙ РАЗВЕРТЫВАЮЩИЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ ПЕРЕДАЧИ ЛОГИЧЕСКИХ ДАННЫХ ПО ОДНОПРОВОДНОЙ ЛИНИИ СВЯЗИ | 2001 |
|
RU2206922C2 |
| СПОСОБ ПНЕВМАТИЧЕСКОГО ПРЕОБРАЗОВАНИЯ УСКОРЕНИЯ ДВИЖЕНИЯ ТЕЛА В СКОРОСТЬ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2421734C1 |
| Частотно-импульсный регулятор | 1985 |
|
SU1287100A1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ И ПНЕВМАТИЧЕСКИЙ СКОРОСТЕМЕР ДЛЯ ТЕЛА | 2010 |
|
RU2421733C1 |
| Фильтр для систем автоматического регулирования | 1982 |
|
SU1016770A1 |
Изобретение относится к устройствам, использующимся при навигации летательных аппаратов, при измерении ускорения. Техническим результатом является повышение достоверности (уменьшения погрешности) за счет включения в прямую цепь интегратора, линеаризующего выходную характеристику системы измерения, и эффективности измерения путем включения в цепь обратной связи частотной части измерения. Технический результат достигается с помощью способа пневматического частотного измерения ускорения движения тела, по которому ускорение инерционной массы преобразуют во входное давление, усиливают, при этом используют аналоговую отрицательную обратную связь по ускорению, сигнал которой суммируют с входным давлением, выходное давление преобразуют в частоту и подают на счетное устройство, отличающийся тем, что по обратной связи подают выходной частотный сигнал, который преобразуют в частоту импульсов постоянной длительности и постоянной амплитуды, преобразуют импульсный сигнал в аналоговой сигнал давления обратной связи для последующего суммирования и интегрируют сигнал в прямой цепи перед нелинейным элементом, выпрямляя выходную характеристику системы. 2 ил.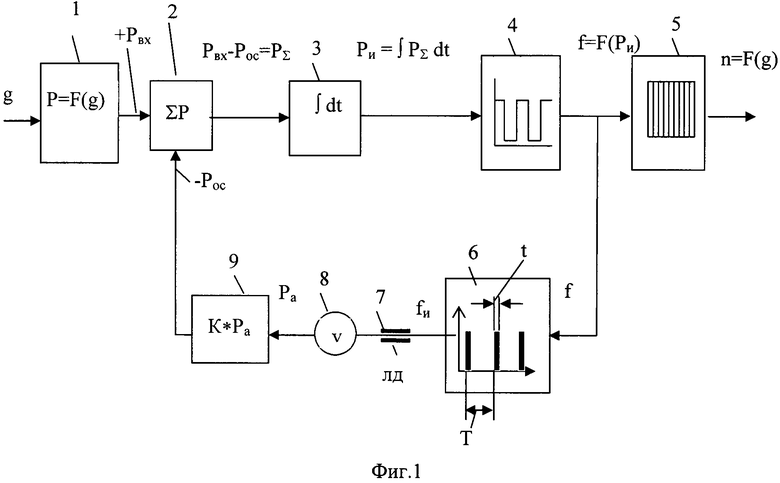
Способ пневматического частотного измерения ускорения движения тела, по которому ускорение инерционной массы преобразуют во входное давление, усиливают, при этом используют аналоговую отрицательную обратную связь по ускорению, сигнал которой суммируют с входным давлением, выходное давление преобразуют в частоту и подают на счетное устройство, отличающийся тем, что по обратной связи подают выходной частотный сигнал, который преобразуют в частоту импульсов постоянной длительности и постоянной амплитуды, преобразуют импульсный сигнал в аналоговой сигнал давления обратной связи для последующего суммирования и интегрируют сигнал в прямой цепи перед нелинейным элементом, выпрямляя выходную характеристику системы.
| СПОСОБ ПНЕВМАТИЧЕСКОГО ПРЕОБРАЗОВАНИЯ УСКОРЕНИЯ ДВИЖЕНИЯ ТЕЛА В СКОРОСТЬ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2421734C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2001 |
|
RU2199754C2 |
| US 3597598 А, 03.08.1971 | |||
| CN 1482466 А, 17.03.2004. | |||

