ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к исполнительному устройству и, в частности, к исполнительному устройству с педальным управлением.
УРОВЕНЬ ТЕХНИКИ
Хорошо известное педальное устройство акселератора типа устройства с электрическим управлением системой привода, которое представляет собой исполнительное устройство с педальным управлением, предназначенное для использования в транспортном средстве, таком как автомобиль, имеет педаль, которая служит в качестве приводного элемента, подлежащего приведению в действие ногой; корпус, который служит в качестве опорного средства, предназначенного для обеспечения опоры для педали с возможностью поворота; поджимающую пружину возврата, предназначенную для поджима педали относительно корпуса в направлении, противоположном направлению, в котором величина воздействия на педаль увеличивается; датчик, предназначенный для определения величины поворотного смещения педали относительно корпуса, и скользящую часть, предназначенную для приложения гистерезисной нагрузки к педали при ее повороте посредством силы трения. Подобное педальное устройство акселератора описано, например, в публикации выложенной заявки на патент Японии №2005-14896.
В соответствии с функционированием педального устройства данного вида, предназначенного для акселератора, скользящая часть создает силу трения, и гистерезисная нагрузка, вызванная силой трения, надежным образом придает гистерезис зависимости между усилием нажима, приложенным к педали, и величиной поворотного смещения педали. Таким образом, по сравнению с педальным устройством акселератора, в котором гистерезис мал, водитель может легче контролировать усилие, развиваемое приводом транспортного средства, посредством нажима на педаль акселератора.
В педальном устройстве акселератора вышеупомянутого типа при установке большой гистерезисной нагрузки так, что водитель может легко поддерживать величину нажима на педаль акселератора на уровне постоянной величины, усилие нажима, необходимое для начала поворота педали акселератора, становится чрезмерно большим; таким образом, водитель испытывает так называемое ощущение нажима на стену, когда он начинает нажимать на педаль акселератора. Кроме того, поскольку педаль акселератора не возвращается до тех пор, пока усилие нажима не будет значительно уменьшено при ослаблении водителем усилия, действующего на педаль акселератора, он испытывает ощущение дефектного возврата педали акселератора.
Напротив, когда гистерезисная нагрузка установлена малой, может быть ослаблено ощущение нажима на стену во время начала нажатия на педаль акселератора и ощущение дефектного возврата педали акселератора во время ослабления нагрузки, действующей на педаль акселератора. Однако в данном случае, например, даже тогда, когда усилие нажима незначительно изменяется при вибрации транспортного средства или тому подобном, ход нажима на педаль акселератора варьируется; таким образом, водитель будет сталкиваться с трудностями при поддержании величины нажима на педаль акселератора на уровне постоянной величины.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Главная задача настоящего изобретения заключается в разработке исполнительного устройства с педальным управлением, которое может сделать более легким устойчивое поддержание величины усилия нажима на приводной элемент с ножным управлением, такой как педаль акселератора, при одновременном ослаблении ощущения нажима на стену во время начала нажатия на приводной элемент и ощущения дефектного возврата приводного элемента во время ослабления усилия, действующего на приводной элемент, посредством создания гистерезиса за счет силы трения и силы реакции, возникающей в результате упругой деформации, связанной с относительным смещением приводного элемента относительно опорного средства.
В соответствии с настоящим изобретением создано исполнительное устройство с педальным управлением, содержащее приводной элемент, приводимый в действие ногой, опорное средство, обеспечивающее опоры для приводного элемента таким образом, что приводной элемент может подвергаться относительному смещению относительно опорного средства, первую пару поверхностей трения и вторую пару поверхностей трения, каждая из которых включает в себя спаренные поверхности трения, которые предназначены для создания силы сопротивления, противодействующей относительному смещению приводного элемента, посредством силы трения, образованной между спаренными поверхностями трения, и которые отличаются друг от друга по коэффициенту статического трения, и элемент для обеспечения смещения, который обеспечивает возможность перемещения первой или второй пары поверхностей трения, имеющей больший коэффициент статического трения, вместе с приводным элементом при их относительном смещении. В соответствии с настоящим изобретением также создано исполнительное устройство с педальным управлением, содержащее приводной элемент, подлежащий приведению в действие ногой, опорное средство, предназначенное для обеспечения опоры для приводного элемента таким образом, что приводной элемент может подвергаться относительному смещению относительно опорного средства, первую пару поверхностей трения и вторую пару поверхностей трения, каждая из которых включает в себя спаренные поверхности трения, которые предназначены для создания силы сопротивления, противодействующей относительному смещению приводного элемента, посредством силы трения, образованной между спаренными поверхностями трения, и которые отличаются друг от друга по коэффициенту статического трения, и упругое тело, которое обеспечивает возможность перемещения первой или второй пары поверхностей трения, имеющей больший коэффициент статического трения, вместе с приводным элементом при их относительном смещении.
В соответствии с данными конфигурациями, когда воздействующая сила, приложенная к приводному элементу, увеличится до такой степени, что сила, предназначенная для обеспечения относительного смещения относительно друг друга поверхностей трения из первой или второй пары поверхностей трения, имеющей меньший коэффициент статического трения, превысит максимальную силу статического трения между поверхностями трения, первая или вторая пара поверхностей трения, имеющая больший коэффициент статического трения, перемещается при относительном смещении приводного элемента. Затем, когда воздействующая сила, приложенная к приводному элементу, дополнительно увеличится до такой степени, что сила, предназначенная для обеспечения относительного смещения относительно друг друга поверхностей трения из первой или второй пары поверхностей трения, имеющей больший коэффициент статического трения, превысит максимальную силу статического трения между поверхностями трения, поверхности трения из первой или второй пары поверхностей трения, имеющей больший коэффициент статического трения, подвергаются относительному смещению. Таким образом, в процессе или увеличения, или уменьшения воздействующей силы, приложенной к приводному элементу, зависимость между воздействующей силой и относительным смещением приводного элемента может представлять собой характеристику с двумя перегибами.
Таким образом, по сравнению с обычным исполнительным устройством с педальным управлением, имеющим только участок (характеристики), на котором сила сопротивления создается посредством силы статического трения, и участок, на котором сила сопротивления создается посредством силы динамического трения, исполнительное устройство с педальным управлением по настоящему изобретению может обеспечить бόльшую легкость устойчивого поддержания величины нажима на приводной элемент при одновременном ослаблении ощущения нажима на стену во время начала нажатия на приводной элемент и странного ощущения во время ослабления усилия, действующего на приводной элемент.
Вышеупомянутая конфигурация может быть такой, что упругое тело образует одну из поверхностей трения из первой или второй пары поверхностей трения, имеющей более высокий коэффициент статического трения.
В соответствии с данной конфигурацией одна из поверхностей трения из первой или второй пары поверхностей трения, имеющей более высокий коэффициент статического трения, представляет собой поверхность упругого тела. Таким образом, по сравнению со случаем, когда упругое тело не образует одну из поверхностей трения из первой или второй пары поверхностей трения, имеющей более высокий коэффициент статического трения, конструкция исполнительного устройства с педальным управлением может быть упрощена.
В соответствии с настоящим изобретением также разработано исполнительное устройство автотранспортного средства, в котором отношение относительного смещения приводного элемента к входному воздействию на приводной элемент варьируется до, по меньшей мере, трех значений, и в процессе увеличения входного воздействия после начала увеличения отношение устанавливается на уровне верхнего значения в тот момент, когда входное воздействие имеет большую величину по сравнению с моментом, когда входное воздействие имеет малую величину.
В соответствии с данной конфигурацией зависимость между входным воздействием на приводной элемент и относительным смещением приводного элемента в процессе увеличения входного воздействия после начала увеличения может представлять собой такую характеристику с двумя перегибами, что в процессе, в котором входное воздействие увеличивается, отношение относительного смещения приводного элемента к входному воздействию будет больше в тот момент, когда входное воздействие имеет большую величину по сравнению с моментом, когда входное воздействие имеет малую величину.
В соответствии с настоящим изобретением также разработано исполнительное устройство автотранспортного средства, в котором отношение относительного смещения приводного элемента к входному воздействию на приводной элемент варьируется до, по меньшей мере, трех значений и в процессе уменьшения входного воздействия после начала уменьшения, отношение устанавливается на уровне нижнего значения в тот момент, когда входное воздействие имеет большую величину по сравнению с моментом, когда входное воздействие имеет малую величину.
В соответствии с данной конфигурацией зависимость между входным воздействием на приводной элемент и относительным смещением приводного элемента в процессе уменьшения входного воздействия после начала уменьшения может представлять собой такую характеристику с двумя перегибами, что в процессе, в котором входное воздействие уменьшается, отношение относительного смещения приводного элемента к входному воздействию будет меньше в тот момент, когда входное воздействие имеет большую величину по сравнению с моментом, когда входное воздействие имеет малую величину.
В соответствии с настоящим изобретением также разработано исполнительное устройство с педальным управлением, содержащее приводной элемент, подлежащий приведению в действие ногой, опорное средство, предназначенное для обеспечения опоры для приводного элемента таким образом, что приводной элемент может подвергаться относительному смещению относительно опорного средства, возвратное поджимающее средство, предназначенное для поджима приводного элемента в направлении, противоположном тому направлению, в котором увеличивается величина воздействия на приводной элемент, средство для создания первой силы сопротивления, предназначенное для создания во время относительного смещения приводного элемента первой силы сопротивления, противодействующей относительному смещению, посредством силы трения, создаваемой первой частью, предназначенной для обеспечения трения скольжения, и упругой силы, создаваемой первой частью, предназначенной для обеспечения упругой деформации, и средство для создания второй силы сопротивления, предназначенное для создания во время относительного смещения приводного элемента второй силы сопротивления, противодействующей относительному смещению, посредством силы трения, создаваемой второй частью, предназначенной для обеспечения трения скольжения, и упругой силы, создаваемой второй частью, предназначенной для обеспечения упругой деформации, при этом максимальная сила статического трения, создаваемая второй частью, предназначенной для обеспечения трения скольжения, превышает максимальную силу статического трения, создаваемую первой частью, предназначенной для обеспечения трения скольжения, и вторая часть, предназначенная для обеспечения упругой деформации, имеет зону, в которой модуль упругости второй части, предназначенной для обеспечения упругой деформации, меньше модуля упругости первой части, предназначенной для обеспечения упругой деформации.
В соответствии с данной конфигурацией максимальная сила статического трения, создаваемая второй частью, предназначенной для обеспечения трения скольжения, превышает максимальную силу статического трения, создаваемую первой частью, предназначенной для обеспечения трения скольжения, и вторая часть, предназначенная для обеспечения упругой деформации, имеет зону, в которой модуль упругости второй части, предназначенной для обеспечения упругой деформации, меньше модуля упругости первой части, предназначенной для обеспечения упругой деформации. Таким образом, величина упругой деформации второй части, предназначенной для обеспечения упругой деформации, меньше величины упругой деформации первой части, предназначенной для обеспечения упругой деформации.
Таким образом, когда поджимающая сила, создаваемая возвратным поджимающим средством, исключается из рассмотрения, могут быть образованы первый участок (характеристики), на котором сила сопротивления создается посредством сил статического трения, создаваемых первой и второй частями, предназначенными для обеспечения трения скольжения, второй участок, на котором сила сопротивления создается посредством силы динамического трения, создаваемой первой частью, предназначенной для обеспечения трения скольжения, и силы реакции, возникающей в результате упругой деформации второй части, предназначенной для обеспечения упругой деформации, и третий участок, на котором сила сопротивления создается посредством сил динамического трения, создаваемых первой и второй частями, предназначенными для обеспечения трения скольжения.
Таким образом, на втором участке скорость увеличения относительного смещения приводного элемента относительно опорного средства при увеличении воздействующей силы, приложенной к приводному элементу, может быть обеспечена большей, чем на первом участке, и на третьем участке скорость увеличения относительного смещения приводного элемента относительно опорного средства при увеличении воздействующей силы, приложенной к приводному элементу, может быть сделана большей, чем на втором участке. Соответственно, по сравнению с обычным исполнительным устройством с педальным управлением, имеющим только участок (характеристики), на котором сила сопротивления создается посредством силы статического трения, и участок, на котором сила сопротивления создается посредством силы динамического трения, исполнительное устройство с педальным управлением по настоящему изобретению может обеспечить более легкое устойчивое поддержание величины нажима на приводной элемент при одновременном ослаблении ощущения нажима на стену в момент начала нажатия на приводной элемент и странного ощущения в момент ослабления усилия, действующего на приводной элемент.
Вышеупомянутая конфигурация может быть такой, что даже тогда, когда воздействующая сила, приложенная к приводному элементу, варьируется в пределах изменений, не превышающих воздействующую силу, соответствующую максимальной силе статического трения, создаваемой первой частью, предназначенной для обеспечения трения скольжения, приводной элемент не подвергается относительному смещению в такой степени, что оператор мог бы ощутить это.
В соответствии с данной конфигурацией даже тогда, когда воздействующая сила, приложенная к приводному элементу, варьируется в пределах изменений, не превышающих воздействующую силу, соответствующую максимальной силе статического трения, создаваемой первой частью, предназначенной для обеспечения трения скольжения, приводной элемент не подвергается относительному смещению относительно опорного средства в такой степени, что оператор мог бы ощутить это. Таким образом, когда воздействующая сила, приложенная к приводному элементу, находится в пределах изменений, не превышающих воздействующую силу, соответствующую максимальной силе статического трения, создаваемой первой частью, предназначенной для обеспечения трения скольжения, может быть обеспечено надежное ограничение относительного смещения приводного элемента относительно опорного средства при колебаниях воздействующей силы, приложенной к приводному элементу. Следовательно, надежным образом может быть дополнительно облегчено устойчивое поддержание величины нажима на приводной элемент. Кроме того, достаточно большая ширина петли гистерезиса может быть надежным образом обеспечена для гистерезиса, связанного с увеличением и уменьшением воздействующей силы.
Вышеупомянутая конфигурация может быть такой, что характеристика зависимости между воздействующей силой, приложенной к приводному элементу, и относительным смещением приводного элемента представляет собой характеристику с двумя перегибами, имеющую первую точку перегиба и вторую точку перегиба, в которой воздействующая сила, приложенная к приводному элементу, превышает воздействующую силу, приложенную к приводному элементу, в первой точке перегиба, и воздействующая сила в первой точке перегиба составляет одну вторую или более от воздействующей силы во второй точке перегиба.
В соответствии с данной конфигурацией характеристика зависимости между воздействующей силой, приложенной к приводному элементу, и относительным смещением приводного элемента относительно опорного средства представляет собой характеристику с двумя перегибами, и воздействующая сила в первой точке перегиба составляет одну вторую или более от воздействующей силы во второй точке перегиба. Таким образом, пределы изменений воздействующей силы на первом участке могут быть сделаны равными или превышающими пределы изменений воздействующей силы на втором участке. Соответственно, по сравнению со случаем, когда воздействующая сила в первой точке перегиба меньше половины воздействующей силы во второй точке перегиба, может быть облегчено устойчивое поддержание величины нажима на приводной элемент.
Вышеупомянутая конфигурация может быть такой, что предусмотрено средство определения величины воздействия, предназначенное для определения величины воздействия на приводной элемент со стороны оператора; средство определения величины воздействия распознает (определяет) относительное смещение приводного элемента, равное заданной опорной величине или превышающее ее; и опорная величина установлена на уровне относительного смещения во второй точке перегиба или больше него.
В соответствии с данной конфигурацией участок, на котором средство определения величины воздействия определяет относительное смещение, может быть ограничен третьим участком, на котором воздействующая сила, приложенная к приводному элементу, и относительное смещение приводного элемента относительно опорного средства надежным образом находятся в линейной зависимости. Таким образом, величина воздействия на приводной элемент может быть точно определена.
Вышеупомянутая конфигурация может быть такой, что отношение величины изменения относительного смещения к величине изменения воздействующей силы на участке, на котором воздействующая сила, приложенная к приводному элементу, больше воздействующей силы во второй точке перегиба, будет больше отношения величины изменения относительного смещения к величине изменения воздействующей силы на участке, на котором воздействующая сила, приложенная к приводному элементу, больше воздействующей силы в первой точке перегиба и равна или меньше воздействующей силы во второй точке перегиба.
В соответствии с данной конфигурацией отношение величины изменения относительного смещения приводного элемента к величине изменения воздействующей силы на третьем участке больше, чем соответствующее отношение на втором участке. Соответственно, в процессе увеличения воздействующей силы, приложенной к приводному элементу после начала нажатия на приводной элемент, может быть надежным образом предотвращено внезапное резкое увеличение относительного смещения приводного элемента относительно опорного средства и соответствующее внезапное резкое увеличение управляющей переменной, подлежащей регулированию за счет операции нажима на приводной элемент.
Вышеупомянутая конфигурация может быть такой, что по мере увеличения воздействующей силы, приложенной к приводному элементу, по меньшей мере, прижимающая сила между находящимися в скользящем контакте друг с другом элементами второй части, предназначенной для обеспечения трения скольжения, увеличивается.
В соответствии с данной конфигурацией, по мере увеличения воздействующей силы, приложенной к приводному элементу, по меньшей мере, прижимающая сила между находящимися в скользящем контакте друг с другом элементами второй части, предназначенной для обеспечения трения скольжения, увеличивается. Таким образом, по сравнению с конфигурацией, в которой даже тогда, когда воздействующая сила, приложенная к приводному элементу, увеличивается, прижимающая сила между находящимися в скользящем контакте друг с другом элементами второй части, предназначенной для обеспечения трения скольжения, не увеличивается, конфигурация по настоящему изобретению может обеспечить уменьшение отношения величины изменения относительного смещения приводного элемента к величине изменения воздействующей силы во время увеличения воздействующей силы на третьем участке. Соответственно, ширина петли гистерезиса между воздействующей силой, приложенной к приводному элементу, и относительным смещением приводного элемента может быть увеличена вместе с воздействующей силой, приложенной к приводному элементу.
Вышеупомянутая конфигурация может быть такой, что прижимающая сила будет увеличиваться вместе с воздействующей силой, приложенной к приводному элементу, посредством действия поджимающей силы, создаваемой возвратным поджимающим средством, между находящимися в скользящем контакте друг с другом элементами второй части, предназначенной для обеспечения трения скольжения.
В соответствии с данной конфигурацией прижимающая сила увеличивается вместе с воздействующей силой, приложенной к приводному элементу, посредством действия поджимающей силы, создаваемой возвратным поджимающим средством между находящимися в скользящем контакте друг с другом элементами второй части, предназначенной для обеспечения трения скольжения. Соответственно, за счет эффективного использования поджимающей силы, действующей со стороны возвратного поджимающего средства, которая увеличивается вместе с воздействующей силой, приложенной к приводному элементу, прижимающая сила может быть надежным образом увеличена вместе с воздействующей силой, приложенной к приводному элементу.
Вышеупомянутая конфигурация может быть такой, что средство для создания первой силы сопротивления будет опираться на один из приводного элемента и опорного средства, и находится в скользящем контакте с другим из приводного элемента и опорного средства, в результате чего образуется первая часть, предназначенная для обеспечения трения скольжения, и средство для создания второй силы сопротивления будет опираться на один из приводного элемента и опорного средства, и находится в скользящем контакте с другим из приводного элемента и опорного средства, в результате чего образуется вторая часть, предназначенная для обеспечения трения скольжения.
В соответствии с данной конфигурацией средство для создания первой силы сопротивления опирается на один из приводного элемента и опорного средства и находится в скользящем контакте с другим из приводного элемента и опорного средства, в результате чего образуется первая часть, предназначенная для обеспечения трения скольжения, и средство для создания второй силы сопротивления опирается на один из приводного элемента и опорного средства и находится в скользящем контакте с другим из приводного элемента и опорного средства, в результате чего образуется вторая часть, предназначенная для обеспечения трения скольжения. Таким образом, упругие характеристики первой и второй частей, предназначенных для обеспечения упругой деформации, могут быть заданы в соответствии с требуемыми силами сопротивления и независимо от упругой характеристики возвратного поджимающего средства. Следовательно, по сравнению с конфигурацией, в которой средства для создания первой и второй сил сопротивления находятся в скользящем контакте с возвратным поджимающим средством, легко может быть выполнена исходная установка средств для создания первой и второй сил сопротивления, то есть установка средств для создания первой и второй сил сопротивления в состоянии, в котором никакая воздействующая сила не приложена к приводному элементу.
Вышеупомянутая конфигурация может быть такой, что возвратное поджимающее средство будет иметь первое и второе возвратные поджимающие средства; средство для создания первой силы сопротивления опирается или на приводной элемент, или на опорное средство и находится в скользящем контакте с первым возвратным поджимающим средством, в результате чего образуется первая часть, предназначенная для обеспечения трения скольжения, и средство для создания второй силы сопротивления опирается или на приводной элемент, или на опорное средство и находится в скользящем контакте со вторым возвратным поджимающим средством, в результате чего образуется вторая часть, предназначенная для обеспечения трения скольжения.
В соответствии с данной конфигурацией возвратное поджимающее средство имеет первое и второе возвратные поджимающие средства; средство для создания первой силы сопротивления опирается или на приводной элемент, или на опорное средство и находится в скользящем контакте с первым возвратным поджимающим средством, в результате чего образуется первая часть, предназначенная для обеспечения трения скольжения, и средство для создания второй силы сопротивления опирается или на приводной элемент, или на опорное средство и находится в скользящем контакте со вторым возвратным поджимающим средством, в результате чего образуется вторая часть, предназначенная для обеспечения трения скольжения. Таким образом, по сравнению с вышеупомянутой конфигурацией, имеющей одно возвратное поджимающее средство, характеристика зависимости между воздействующей силой, приложенной к приводному элементу, и относительным смещением приводного элемента относительно опорного средства может обеспечить бульшую степень свободы при их установке.
Вышеупомянутая конфигурация может быть такой, что средство для создания первой силы сопротивления будет опираться или на приводной элемент, или на опорное средство и находится в скользящем контакте с возвратным поджимающим средством, в результате чего образуется первая часть, предназначенная для обеспечения трения скольжения, и средство для создания второй силы сопротивления будет опираться или на приводной элемент, или на опорное средство и находится в скользящем контакте с возвратным поджимающим средством, в результате чего образуется вторая часть, предназначенная для обеспечения трения скольжения.
В соответствии с данной конфигурацией средство для создания первой силы сопротивления опирается или на приводной элемент, или на опорное средство и находится в скользящем контакте с возвратным поджимающим средством, в результате чего образуется первая часть, предназначенная для обеспечения трения скольжения, и средство для создания второй силы сопротивления опирается или на приводной элемент, или на опорное средство и находится в скользящем контакте с возвратным поджимающим средством, в результате чего образуется вторая часть, предназначенная для обеспечения трения скольжения. Таким образом, по сравнению с вышеупомянутой конфигурацией число требуемых компонентов может быть уменьшено, так что конструкция исполнительного устройства с педальным управлением может быть упрощена.
По сравнению с вышеупомянутой конфигурацией данная конфигурация может обеспечить уменьшение степени распространения в направлении средств для создания первой и второй сил сопротивления отрицательного воздействия силы, которая действует между приводным элементом и опорным средством таким образом, что она вызывает тенденцию смещения приводного элемента и опорного средства в направлении, отличном от того направления, в котором приводной элемент может подвергаться относительному смещению относительно опорного средства.
Вышеупомянутая конфигурация может быть такой, что, когда сила трения, создаваемая первой частью, предназначенной для обеспечения трения скольжения, равна максимальной силе статического трения или меньше ее, средство для создания первой силы сопротивления предотвращает упругое деформирование возвратного поджимающего средства, превышающее величину упругой деформации первой части, предназначенной для обеспечения упругой деформации, и когда сила трения, создаваемая второй частью, предназначенной для обеспечения трения скольжения, равна максимальной силе статического трения или меньше ее, средство для создания второй силы сопротивления предотвращает упругое деформирование возвратного поджимающего средства, превышающее величину упругой деформации второй части, предназначенной для обеспечения упругой деформации.
В соответствии с данной конфигурацией, когда сила трения, создаваемая первой частью, предназначенной для обеспечения трения скольжения, равна максимальной силе статического трения или меньше ее, средство для создания первой силы сопротивления может предотвратить упругое деформирование возвратного поджимающего средства, превышающее величину упругой деформации первой части, предназначенной для обеспечения упругой деформации, и когда сила трения, создаваемая второй частью, предназначенной для обеспечения трения скольжения, равна максимальной силе статического трения или меньше ее, средство для создания второй силы сопротивления может предотвратить упругое деформирование возвратного поджимающего средства, превышающее величину упругой деформации второй части, предназначенной для обеспечения упругой деформации. Таким образом, вышеупомянутая конфигурация может надежным образом обеспечить получение характеристики с двумя перегибами.
Вышеупомянутая конфигурация может быть такой, что когда сила трения, создаваемая первой частью, предназначенной для обеспечения трения скольжения, равна максимальной силе статического трения или меньше нее, средство для создания первой силы сопротивления предотвращает упругое деформирование первого возвратного поджимающего средства, превышающее величину упругой деформации первой части, предназначенной для обеспечения упругой деформации, и когда сила трения, создаваемая второй частью, предназначенной для обеспечения трения скольжения, равна максимальной силе статического трения или меньше нее, средство для создания второй силы сопротивления предотвращает упругое деформирование второго возвратного поджимающего средства, превышающее величину упругой деформации второй части, предназначенной для обеспечения упругой деформации.
В соответствии с данной конфигурацией, когда сила трения, создаваемая первой частью, предназначенной для обеспечения трения скольжения, равна максимальной силе статического трения или меньше нее, средство для создания первой силы сопротивления может предотвратить упругое деформирование первого возвратного поджимающего средства, превышающее величину упругой деформации первой части, предназначенной для обеспечения упругой деформации, и когда сила трения, создаваемая второй частью, предназначенной для обеспечения трения скольжения, равна максимальной силе статического трения или меньше нее, средство для создания второй силы сопротивления может предотвратить упругое деформирование второго возвратного поджимающего средства, превышающее величину упругой деформации второй части, предназначенной для обеспечения упругой деформации. Следовательно, вышеупомянутая конфигурация может надежным образом обеспечить получение характеристики с двумя перегибами.
Вышеупомянутая конфигурация может быть такой, что приводной элемент может поворачиваться вокруг оси поворота, и средства для создания первой и второй сил сопротивления разнесены друг от друга в направлении вдоль оси поворота.
В соответствии с данной конфигурацией приводной элемент может поворачиваться вокруг оси поворота, и средства для создания первой и второй сил сопротивления разнесены друг от друга в направлении вдоль оси поворота приводного элемента. Таким образом, силы трения, которые должны быть созданы средствами, предназначенными для создания первой и второй сил сопротивления, могут действовать в соответствующих местах, расположенных на расстоянии друг от друга вдоль оси поворота, и силы реакции, возникающие в результате упругих деформаций, могут действовать в соответствующих местах, расположенных на расстоянии друг от друга вдоль оси поворота. Следовательно, по сравнению со случаем, когда средства для создания первой и второй сил сопротивления не разнесены друг от друга в направлении вдоль оси поворота приводного элемента, концентрация силы сопротивления может быть уменьшена.
Вышеупомянутая конфигурация может быть такой, что приводной элемент имеет осевой стержень; опорное средство имеет опорные части, предназначенные для обеспечения опоры для осевого стержня с возможностью его поворота; средство для создания первой силы сопротивления имеет первую прокладку, расположенную между одной торцевой поверхностью осевого стержня и соответствующей опорной частью, и средство для создания второй силы сопротивления имеет вторую прокладку, расположенную между другой торцевой поверхностью осевого стержня и соответствующей опорной частью.
В соответствии с данной конфигурацией действия и эффекты вышеупомянутых конфигураций могут быть надежным образом получены посредством соответствующего задания коэффициента трения и давления на поверхности контакта между одной торцевой поверхностью осевого стержня и первой прокладкой, коэффициента трения и давления на поверхности контакта между другой торцевой поверхностью осевого стержня и второй прокладкой и модуля упругости, по меньшей мере, части первой или второй прокладки.
В соответствии с вышеупомянутой конфигурацией даже тогда, когда нагрузка приложена к приводному элементу в направлении вдоль осевого стержня, одно давление из давления на поверхности контакта между одной торцевой поверхностью осевого стержня и первой прокладкой и давления на поверхности контакта между другой торцевой поверхностью осевого стержня и второй прокладкой увеличивается, но давление на другие поверхности контакта уменьшается. Таким образом, по сравнению с конструкцией, в которой при увеличении давления на одни поверхности контакта давление на другие поверхности контакта не уменьшается, в данном случае может быть надежным образом уменьшена величина колебаний суммарной силы трения, действующей на приводной элемент, то есть колебаний, являющихся результатом действия нагрузки, которая приложена к приводному элементу в направлении вдоль осевого стержня.
Вышеупомянутая конфигурация может быть такой, что предусмотрено средство регулирования давления на поверхности, предназначенное для регулирования, по меньшей мере, одного давления из давления поверхности контакта первой прокладки на одну торцевую поверхность осевого стержня и давления поверхности контакта второй прокладки на другую торцевую поверхность осевого стержня.
В соответствии с данной конфигурацией предусмотрено средство регулирования давления на поверхности, предназначенное для регулирования, по меньшей мере, одного давления из давления поверхности контакта первой прокладки на одну торцевую поверхность осевого стержня и давления поверхности контакта второй прокладки на другую торцевую поверхность осевого стержня. Таким образом, за счет регулирования давления на поверхности контакта посредством средства регулирования давления на поверхности может быть обеспечено надежное регулирование силы трения между прокладкой и соответствующей торцевой поверхностью.
Вышеупомянутая конфигурация может быть такой, что приводной элемент имеет осевой стержень, и средства для создания первой и второй сил сопротивления предусмотрены в соответствующих местах, удаленных от осевого стержня в направлении, перпендикулярном оси осевого стержня.
В соответствии с данной конфигурацией приводной элемент имеет осевой стержень, и средства для создания первой и второй сил сопротивления предусмотрены в соответствующих местах, удаленных от осевого стержня в направлении, перпендикулярном оси осевого стержня; таким образом, силы трения и силы реакции, возникающие в результате упругих деформаций, могут действовать совместно с относительным поворотом («движением по дуге») приводного элемента вокруг оси осевого стержня.
Вышеупомянутая конфигурация может быть такой, что каждое из первого и второго возвратных поджимающих средств имеет часть, легко поддающуюся упругой деформации, и часть, труднее поддающуюся упругой деформации, и средства для создания первой и второй сил сопротивления находятся в скользящем контакте с соответствующими частями первого и второго возвратных поджимающих средств, труднее поддающимися упругой деформации.
В соответствии с данной конфигурацией каждое из первого и второго возвратных поджимающих средств имеет часть, легко поддающуюся упругой деформации, и часть, труднее поддающуюся упругой деформации, и средства для создания первой и второй сил сопротивления находятся в скользящем контакте с соответствующими частями первого и второго возвратных поджимающих средств, труднее поддающимися упругой деформации. Таким образом, по сравнению с конфигурацией, в которой средства для создания первой и второй сил сопротивления находятся в скользящем контакте с легко поддающимися упругой деформации частями соответственно первого и второго возвратных поджимающих средств, силы сопротивления могут создаваться устойчивым образом за счет сил трения, создаваемых первой и второй частями, предназначенными для обеспечения трения скольжения. Соответственно, исполнительное устройство с педальным управлением может устойчиво приводиться в действие.
Вышеупомянутая конфигурация может быть такой, что возвратное поджимающее средство имеет часть, легко поддающуюся упругой деформации, и часть, труднее поддающуюся упругой деформации, и средства для создания первой и второй сил сопротивления находятся в скользящем контакте с частью, труднее поддающейся упругой деформации.
В соответствии с данной конфигурацией возвратное поджимающее средство имеет часть, легко поддающуюся упругой деформации, и часть, труднее поддающуюся упругой деформации, и средства для создания первой и второй сил сопротивления находятся в скользящем контакте с частью, труднее поддающейся упругой деформации. Таким образом, как и в случае вышеупомянутой конфигурации, по сравнению с конфигурацией, в которой средства для создания первой и второй сил сопротивления находятся в скользящем контакте с легко поддающейся упругой деформации частью возвратного поджимающего средства, силы сопротивления могут создаваться устойчивым образом за счет сил трения, создаваемых первой и второй частями, предназначенными для обеспечения трения скольжения. Соответственно, исполнительное устройство с педальным управлением может устойчиво приводиться в действие.
Вышеупомянутая конфигурация может быть такой, что часть возвратного поджимающего средства находится в скользящем контакте с другой частью возвратного поджимающего средства, в результате чего образуется первая часть, предназначенная для обеспечения трения скольжения.
В соответствии с данной конфигурацией часть возвратного поджимающего средства находится в скользящем контакте с другой частью возвратного поджимающего средства, в результате чего образуется первая часть, предназначенная для обеспечения трения скольжения. Таким образом, первая часть, предназначенная для обеспечения трения скольжения, необязательно должна иметь независимый элемент, находящийся в скользящем контакте с возвратным поджимающим средством. По сравнению с конфигурацией, в которой предусмотрен независимый второй элемент, число требуемых компонентов может быть уменьшено.
Вышеупомянутая конфигурация может быть такой, что приводной элемент представляет собой поворотную педаль, которая опирается с возможностью поворота на опорное средство.
В соответствии с данной конфигурацией приводной элемент представляет собой поворотную педаль, которая опирается с возможностью поворота на опорное средство; таким образом, действия и эффекты вышеупомянутых конфигураций могут быть обеспечены в отношении поворотной педали, такой как педаль акселератора автомобиля.
Вышеупомянутая конфигурация может быть такой, что вторая часть, предназначенная для обеспечения упругой деформации, упруго деформируется под действием силы трения, создаваемой второй частью, предназначенной для обеспечения трения скольжения, в то время, когда приводной элемент подвергается относительному смещению относительно опорного средства.
Вышеупомянутая конфигурация может быть такой, что коэффициент статического трения второй части, предназначенной для обеспечения трения скольжения, будет больше коэффициента статического трения первой части, предназначенной для обеспечения трения скольжения.
Вышеупомянутая конфигурация может быть такой, что даже тогда, когда воздействующая сила, приложенная к приводному элементу, изменяется в пределах изменений, не превышающих воздействующую силу, соответствующую максимальной силе статического трения, создаваемой первой частью, предназначенной для обеспечения трения скольжения, вторая часть, предназначенная для обеспечения упругой деформации, по существу не подвергается упругой деформации.
Вышеупомянутая конфигурация может быть такой, что по мере увеличения воздействующей силы, приложенной к приводному элементу, прижимающая сила между находящимися в скользящем контакте друг с другом элементами первой части, предназначенной для обеспечения трения скольжения, увеличивается.
Вышеупомянутая конфигурация может быть такой, что по мере увеличения воздействующей силы, приложенной к приводному элементу, прижимающая сила между находящимися в скользящем контакте друг с другом элементами первой части, предназначенной для обеспечения трения скольжения, увеличивается за счет упругой деформации первой части, предназначенной для обеспечения упругой деформации.
Вышеупомянутая конфигурация может быть такой, что прижимающая сила между находящимися во фрикционном скользящем контакте друг с другом элементами первой и второй частей, предназначенных для обеспечения трения скольжения, является по существу постоянной независимо от воздействующей силы, приложенной к приводному элементу.
Вышеупомянутая конфигурация может быть такой, что воздействующая сила в первой точке перегиба составляет от одной второй до двух третей включительно от воздействующей силы во второй точке перегиба.
Вышеупомянутая конфигурация может быть такой, что средство определения величины воздействия определяет усилие нажима, которое оператор прикладывает к приводному элементу.
Вышеупомянутая конфигурация может быть такой, что средства для создания первой и второй сил сопротивления будут расположены соответственно с противоположных сторон от центральной оси поворотной педали, перпендикулярной к оси поворота.
Вышеупомянутая конфигурация может быть такой, что средства для создания первой и второй сил сопротивления имеют соответственно первую фрикционную пластину и вторую фрикционную пластину, которые образуют соответственно первую часть для обеспечения фрикционного взаимодействия и вторую часть для обеспечения фрикционного взаимодействия, предназначенные для обеспечения фрикционного взаимодействия с приводными элементом или опорным средством, и первая и вторая фрикционные пластины прикреплены к приводному элементу или к опорному средству.
Вышеупомянутая конфигурация может быть такой, что по мере увеличения воздействующей силы, приложенной к приводному элементу, прижимающая сила между первым средством для создания фрикционного контакта и первым возвратным поджимающим средством и прижимающая сила между вторым средством для создания фрикционного контакта и вторым возвратным поджимающим средством увеличиваются.
Вышеупомянутая конфигурация может быть такой, что по мере увеличения воздействующей силы, приложенной к приводному элементу, прижимающая сила между первым средством для создания фрикционного контакта и первой частью, предназначенной для обеспечения упругой деформации, и прижимающая сила между вторым средством для создания фрикционного контакта и второй частью, предназначенной для обеспечения упругой деформации, увеличиваются.
Вышеупомянутая конфигурация может быть такой, что исполнительное устройство с педальным управлением представляет педальное устройство акселератора автомобиля типа устройства с электрическим управлением системой привода.
Вышеупомянутая конфигурация может быть такой, что исполнительное устройство с педальным управлением представляет собой тормозное педальное устройство автомобиля типа устройства с электрическим управлением тормозной системой.
Вышеупомянутая конфигурация может быть такой, что приводной элемент представляет собой педаль с возвратно-поступательным движением, которая опирается на опорное средство с возможностью возвратно-поступательного движения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 - вид в горизонтальном сечении, показывающий первый вариант осуществления исполнительного устройства с педальным управлением в соответствии с настоящим изобретением, при этом устройство выполнено в виде педального устройства акселератора автомобиля типа устройства с электрическим управлением системой привода.
Фиг.2 - вид сбоку, показывающий первый вариант осуществления с удаленным вспомогательным элементом корпуса.
Фиг.3 - разъясняющий вид, показывающий педальное устройство акселератора по первому варианту осуществления, которое моделируется как устройство с прямолинейным движением, при этом показано состояние, в котором рычаг педали не смещен относительно опорного корпуса.
Фиг.4 - разъясняющий вид, показывающий педальное устройство акселератора по первому варианту осуществления, которое моделируется как устройство с прямолинейным движением, при этом показано состояние, в котором рычаг педали незначительно смещен относительно опорного корпуса.
Фиг.5 - разъясняющий вид, показывающий педальное устройство акселератора по первому варианту осуществления, которое моделируется как устройство с прямолинейным движением, при этом показано состояние, в котором рычаг педали довольно значительно смещен относительно опорного корпуса.
Фиг.6 - график, показывающий зависимость в первом варианте осуществления между усилием F нажима, приложенным к педальной части рычага педали, и ходом S педальной части вокруг оси (характеристическая кривая F-S).
Фиг.7 - график, показывающий гистерезис характеристической кривой F-S в первом варианте осуществления.
Фиг.8 - разъясняющий вид, показывающий обычное педальное устройство акселератора, которое моделируется как устройство с прямолинейным движением.
Фиг.9 - график, показывающий характеристическую кривую F-S для обычного педального устройства акселератора в случае высокого коэффициента трения и гистерезис характеристической кривой F-S.
Фиг.10 - график, показывающий характеристическую кривую F-S для обычного педального устройства акселератора в случае низкого коэффициента трения и гистерезис характеристической кривой F-S.
Фиг.11 - вид в горизонтальном сечении, показывающий второй вариант осуществления исполнительного устройства с педальным управлением в соответствии с настоящим изобретением, при этом устройство выполнено в виде педального устройства акселератора автомобиля типа устройства с электрическим управлением системой привода.
Фиг.12 - вид в горизонтальном сечении, показывающий третий вариант осуществления исполнительного устройства с педальным управлением в соответствии с настоящим изобретением, при этом устройство выполнено в виде педального устройства акселератора автомобиля типа устройства с электрическим управлением системой привода.
Фиг.13 - вид сбоку, показывающий третий вариант осуществления с удаленным вспомогательным элементом корпуса.
Фиг.14 - вид в горизонтальном сечении, показывающий четвертый вариант осуществления исполнительного устройства с педальным управлением в соответствии с настоящим изобретением, при этом устройство выполнено в виде педального устройства акселератора автомобиля типа устройства с электрическим управлением системой привода.
Фиг.15 - вид сбоку, показывающий четвертый вариант осуществления с удаленным вспомогательным элементом корпуса.
Фиг.16 - вид в горизонтальном сечении, показывающий в упрощенном виде пятый вариант осуществления исполнительного устройства с педальным управлением в соответствии с настоящим изобретением, при этом устройство выполнено в виде педального устройства акселератора автомобиля типа устройства с электрическим управлением системой привода.
Фиг.17 - график, показывающий гистерезис характеристической кривой F-S в модифицированном варианте осуществления, который модифицирован таким образом, что по мере увеличения угла поворота рычага педали относительно опорного корпуса давления на поверхности контакта первой и второй частей, предназначенных для обеспечения фрикционного взаимодействия, постепенно увеличиваются.
Фиг.18 - вид сбоку, показывающий шестой вариант осуществления исполнительного устройства с педальным управлением в соответствии с настоящим изобретением, при этом устройство выполнено в виде педального устройства акселератора автомобиля типа устройства с электрическим управлением системой привода.
Фиг.19 - увеличенный частичный вид сзади, показывающий шестой вариант осуществления.
Фиг.20 - увеличенный частичный вид снизу, показывающий шестой вариант осуществления.
Фиг.21 - разъясняющий вид, показывающий педальное устройство акселератора по шестому варианту осуществления, которое моделируется как устройство с прямолинейным движением, при этом показано состояние, в котором рычаг педали не смещен относительно опорного корпуса.
Фиг.22 - разъясняющий вид, показывающий педальное устройство акселератора по шестому варианту осуществления, которое моделируется как устройство с прямолинейным движением, при этом показано состояние, в котором рычаг педали незначительно смещен относительно опорного корпуса.
Фиг.23 - разъясняющий вид, показывающий педальное устройство акселератора по шестому варианту осуществления, которое моделируется как устройство с прямолинейным движением, при этом показано состояние, в котором рычаг педали довольно значительно смещен относительно опорного корпуса.
Фиг.24 - вид сбоку, показывающий седьмой вариант осуществления исполнительного устройства с педальным управлением в соответствии с настоящим изобретением, при этом устройство выполнено в виде педального устройства акселератора автомобиля типа устройства с электрическим управлением системой привода.
Фиг.25 - вид сзади, показывающий седьмой вариант осуществления.
Фиг.26 - график, показывающий гистерезис характеристической кривой F-S в седьмом варианте осуществления.
Фиг.27 - вид сбоку, показывающий восьмой вариант осуществления исполнительного устройства с педальным управлением в соответствии с настоящим изобретением, при этом устройство выполнено в виде педального устройства акселератора автомобиля типа устройства с электрическим управлением системой привода.
Фиг.28 - увеличенный частичный вид сзади, показывающий восьмой вариант осуществления.
Фиг.29 - вид в плане, показывающий элемент для обеспечения скользящего контакта.
Фиг.30 представляет собой вид с торца, показывающий элемент для обеспечения скользящего контакта.
Фиг.31 - вид сбоку, показывающий девятый вариант осуществления исполнительного устройства с педальным управлением в соответствии с настоящим изобретением, при этом устройство выполнено в виде педального устройства акселератора автомобиля типа устройства с электрическим управлением системой привода.
Фиг.32 - увеличенный частичный вид сзади, показывающий девятый вариант осуществления.
Фиг.33 - вид сбоку, показывающий десятый вариант осуществления исполнительного устройства с педальным управлением в соответствии с настоящим изобретением, при этом устройство выполнено в виде педального устройства акселератора автомобиля типа устройства с электрическим управлением системой привода.
Фиг.34 - вид сзади, показывающий десятый вариант осуществления.
Фиг.35 - график, показывающий гистерезис характеристической кривой F-S в десятом варианте осуществления.
Фиг.36 - вид сбоку, показывающий одиннадцатый вариант осуществления исполнительного устройства с педальным управлением в соответствии с настоящим изобретением, при этом устройство выполнено в виде педального устройства акселератора автомобиля типа устройства с электрическим управлением системой привода.
Фиг.37 - увеличенный частичный вид сзади, показывающий одиннадцатый вариант осуществления.
Фиг.38 - вид спереди, показывающий первый торсионный стержень.
Фиг.39 - вид спереди, показывающий второй торсионный стержень.
Фиг.40 - вид спереди, показывающий одну опору опорного кронштейна, если смотреть в направлении оси рычага педали.
Фиг.41 - вид спереди, показывающий другую опору опорного кронштейна, если смотреть в направлении оси рычага педали.
Фиг.42 - вид сбоку, показывающий двенадцатый вариант осуществления исполнительного устройства с педальным управлением в соответствии с настоящим изобретением, при этом устройство выполнено в виде педального устройства акселератора автомобиля типа устройства с электрическим управлением системой привода.
Фиг.43 - увеличенный частичный вид сзади, показывающий двенадцатый вариант осуществления.
Фиг.44 - увеличенный вид в поперечном сечении, показывающий существенную часть двенадцатого варианта осуществления.
Фиг.45 - вид сбоку, показывающий тринадцатый вариант осуществления исполнительного устройства с педальным управлением в соответствии с настоящим изобретением, при этом устройство выполнено в виде педального устройства акселератора автомобиля типа устройства с электрическим управлением системой привода.
Фиг.46 - увеличенный частичный вид сзади, показывающий тринадцатый вариант осуществления.
Фиг.47 - увеличенный вид в частичном сечении, показывающий существенную часть тринадцатого варианта осуществления.
Фиг.48 - вид сбоку, показывающий четырнадцатый вариант осуществления исполнительного устройства с педальным управлением в соответствии с настоящим изобретением, при этом устройство выполнено в виде педального устройства акселератора автомобиля типа устройства с электрическим управлением системой привода.
Фиг.49 - увеличенный частичный вид сзади, показывающий четырнадцатый вариант осуществления.
Фиг.50 - вид в плане, показывающий модифицированный элемент для обеспечения скользящего контакта.
Фиг.51 - вид с торца, показывающий модифицированный элемент для обеспечения скользящего контакта.
Фиг.52 - разъясняющий вид, показывающий педальное устройство акселератора по четырнадцатому варианту осуществления, которое моделируется как устройство с прямолинейным движением, при этом показано состояние, в котором рычаг педали не смещен относительно опорного корпуса.
Фиг.53 - разъясняющий вид, показывающий педальное устройство акселератора по четырнадцатому варианту осуществления, которое моделируется как устройство с прямолинейным движением, при этом показано состояние, в котором рычаг педали незначительно смещен относительно опорного корпуса.
Фиг.54 - разъясняющий вид, показывающий педальное устройство акселератора по четырнадцатому варианту осуществления, которое моделируется как устройство с прямолинейным движением, при этом показано состояние, в котором рычаг педали довольно значительно смещен относительно опорного корпуса.
Фиг.55 - вид сбоку, показывающий пятнадцатый вариант осуществления исполнительного устройства с педальным управлением в соответствии с настоящим изобретением, при этом устройство выполнено в виде педального устройства акселератора автомобиля типа устройства с электрическим управлением системой привода.
Фиг.56 - вид сзади, показывающий пятнадцатый вариант осуществления.
Фиг.57 - вид, показывающий модель модифицированного варианта осуществления для шестого - тринадцатого вариантов осуществления.
Фиг.58 - вид, показывающий модель модифицированного варианта осуществления для четырнадцатого и пятнадцатого вариантов осуществления.
СПОСОБ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Предпочтительные варианты осуществления настоящего изобретения будут описаны далее со ссылкой на приложенные чертежи.
Первый вариант осуществления изобретения
Фиг.1 представляет собой горизонтальное сечение, показывающее первый вариант осуществления исполнительного устройства с педальным управлением в соответствии с настоящим изобретением, при этом устройство выполнено в виде педального устройства акселератора автомобиля типа устройства с электрическим управлением системой привода. Фиг.2 представляет собой вид сбоку, показывающий первый вариант осуществления с удаленным вспомогательным элементом корпуса.
На данных чертежах ссылочной позицией 10 обозначено все педальное устройство акселератора. Педальное устройство 10 акселератора имеет рычаг 12 педали, который служит в качестве приводного элемента, подлежащего приведению в действие ногой; опорный корпус 14, который служит в качестве опорного средства для обеспечения опоры для рычага 12 педали с возможностью поворота; внутреннюю пружину 16 и наружную пружину 18, которые вместе служат в качестве возвратного поджимающего средства, предназначенного для принудительного поворота рычага 12 педали относительно опорного корпуса 14 в направлении, противоположном направлению увеличения величины воздействия на рычаг 12 педали, и датчик 20 открытия, который служит в качестве средства для определения величины воздействия на рычаг 12 педали.
Рычаг 12 педали имеет часть 12А в виде цилиндрического валика, проходящую вдоль оси 22 рычага 12 педали; часть 12В, образующую первое плечо рычага, образованную за одно целое с частью 12А в виде валика, имеющую форму, напоминающую букву J, и простирающуюся в направлении, пересекающем ось 22; педальную часть 12С, которая образована за одно целое с концом части 12В, образующей первое плечо рычага, и к которой нога водителя прикладывает усилие нажима, и часть 12D, образующую второе плечо рычага, расположенную на стороне, противоположной по отношению к части 12В, образующей первое плечо рычага, относительно части 12А в виде валика и проходящую в направлении, пересекающем ось 22. В проиллюстрированном первом варианте осуществления весь рычаг 12 педали образован из смолы (полимера). Тем не менее, часть рычага 12 педали, такая как педальная часть 12С, может быть образована из металла. На фиг.1 ссылочная позиция 12Е обозначает среднюю линию по ширине рычага 12 педали.
Опорный корпус 14 включает в себя основной элемент 14А корпуса и вспомогательный элемент 14В корпуса. Основной элемент 14А корпуса имеет часть, представляющую собой по существу треугольную боковую стенку, и часть, которая представляет собой периферийную стенку, образована за одно целое с наружной периферийной частью боковой стенки и проходит перпендикулярно боковой стенке. Вспомогательный элемент 14В корпуса имеет форму, аналогичную форме части основного элемента 14А корпуса, представляющей собой боковую стенку. В проиллюстрированном первом варианте осуществления основной элемент 14А корпуса и вспомогательный элемент 14В корпуса выполнены из смолы. Тем не менее, данные элементы корпуса могут быть частично или полностью выполнены из металла.
Основной элемент 14А корпуса и вспомогательный элемент 14В корпуса прикреплены друг к другу непроиллюстрированными винтами и гайками так, что наружная периферийная часть вспомогательного элемента 14В корпуса находится в контакте с торцевой поверхностью части основного элемента 14А корпуса, представляющей собой периферийную стенку. Основной элемент 14А корпуса и вспомогательный элемент 14В корпуса имеют соответственно крепежный фланец 14AF и крепежный фланец 14BF. Крепежные фланцы 14AF и 14BF прикреплены к непроиллюстрированному кузову транспортного средства непроиллюстрированными болтами, в результате чего обеспечивается фиксация элементов корпуса относительно кузова транспортного средства.
Внутренняя пружина 16 и наружная пружина 18 представляют собой цилиндрические винтовые пружины сжатия, расположенные концентрично относительно друг друга. Одни концы данных пружин опираются на гнездо 24 под пружину, образованное на части основного элемента 14А корпуса, представляющей собой периферийную стенку, и другие концы данных пружин опираются на гнездо 26 под пружину, выполненное на части 12D, образующей второе плечо рычага 12 педали. Посредством данной конструкции внутренняя пружина 16 и наружная пружина 18 поджимают рычаг 12 педали в направлении против часовой стрелки вокруг оси 22, если смотреть на фиг.2, таким образом, что часть 12D, образующая второе плечо рычага, входит в контакт с ограничителем 28 полного закрытия, образованным на части основного элемента 14А корпуса, представляющей собой периферийную стенку. Возвратное поджимающее средство не ограничено цилиндрической винтовой пружиной сжатия и может представлять собой любую пружину, известную в данной области техники, такую как цилиндрическая винтовая пружина растяжения, пластинчатая пружина или пружина кручения.
Кроме того, ограничитель 30 полного открытия образован на части основного элемента 14А корпуса, представляющей собой периферийную стенку, на стороне, противоположной ограничителю 28 полного закрытия относительно оси 22. По мере увеличения усилия нажима, приложенного к педальной части 12С, рычаг 12 педали поворачивается вокруг оси 22, преодолевая сопротивление, обусловленное поджимающими силами, создаваемыми внутренней пружиной 16 и наружной пружиной 18. Тем не менее, при контакте с ограничителем 30 полного открытия, предусмотренным на части 12В, образующей первое плечо рычага, ограничитель 30 полного открытия предотвращает дальнейший поворот рычага 12 педали.
Датчик 20 открытия представляет собой датчик угла поворота, предназначенный для определения величины воздействия на рычаг 12 педали посредством определения угла относительного поворота вокруг оси 22 рычага 12 педали относительно опорного корпуса 14. В проиллюстрированном первом варианте осуществления датчик 20 открытия имеет измерительную часть, прикрепленную к основному элементу 14А корпуса и сохраняющую неподвижное состояние, и поворотную часть, которая поворачивается вместе с имеющей вид валика частью 12А рычага 12 педали как одно целое, в результате чего она поворачивается вокруг оси 22 относительно измерительной части. Датчик 20 открытия может представлять собой любой датчик, известный в данной области техники, такой как датчик вращения типа датчика Холла на основе ИС, датчик вращения типа электромагнитного индукционного датчика или поворотный потенциометр, при условии, что он может определить угол относительного поворота рычага 12 педали вокруг оси 22 относительно опорного корпуса 14.
Основной элемент 14А корпуса и вспомогательный элемент 14В корпуса имеют соответственно опорную часть 14АВ и опорную часть 14ВВ. Опорные части 14АВ и 14ВВ имеют соответствующие внутренние цилиндрические поверхности, каждая из которых имеет диаметр, немного превышающий диаметр имеющей вид валика части 12А рычага 12 педали, и обеспечивают опору для соответствующих концевых частей имеющей вид валика части 12А рычага 12 педали с возможностью их поворота. Имеющая вид валика часть 12А рычага 12 педали и опорные части 14АВ и 14ВВ контактируют друг с другом на цилиндрических поверхностях таким образом, чтобы обеспечивалась возможность их поворота относительно друг друга. Данные части могут быть введены во взаимодействие друг с другом на поверхностях усеченного конуса таким образом, чтобы обеспечивалась возможность их поворота относительно друг друга.
Первая прокладка 32А и вторая прокладка 32В расположены соответственно между противоположными торцевыми поверхностями части 12А, имеющей вид валика, и соответствующими поверхностями стенок опорных частей 14АВ и 14ВВ. Первая прокладка 32А и вторая прокладка 32В имеют соответственно первую часть для обеспечения фрикционного взаимодействия и вторую часть для обеспечения фрикционного взаимодействия, предназначенные для обеспечения фрикционного взаимодействия с соответствующими торцевыми поверхностями части 12А в виде валика. Первая прокладка 32А и вторая прокладка 32В функционируют во взаимодействии с соответствующими торцевыми поверхностями части 12А в виде валика, соответственно в качестве средства для создания первой силы сопротивления и средства для создания второй силы сопротивления, предназначенных для создания первой силы сопротивления и второй силы сопротивления относительному поворотному смещению рычага 12 педали относительно опорного корпуса 14. Таким образом, первая часть первой прокладки 32А, предназначенная для обеспечения фрикционного взаимодействия, и соответствующая торцевая поверхность части 12А в виде валика образуют первую пару поверхностей трения, предназначенную для создания первой силы сопротивления, и вторая часть второй прокладки 32В, предназначенная для обеспечения фрикционного взаимодействия, и соответствующая торцевая поверхность части 12А в виде валика образуют вторую пару поверхностей трения, предназначенную для создания второй силы сопротивления.
Первая прокладка 32А и вторая прокладка 32В образованы из одинаковой смолы (полимера) и введены во фрикционное взаимодействие соответственно с участками боковых стенок опорных частей 14АВ и 14ВВ таким образом, чтобы они не поворачивались относительно друг друга. В проиллюстрированном первом варианте осуществления каждая из первой прокладки 32А и второй прокладки 32В принимает форму кольцевой пластины, имеющей внутренний диаметр, который превышает наружный диаметр цилиндрических выступов, выступающих вдоль оси 22 от соответствующих торцевых поверхности части 12А в виде валика, и толщину, которая превышает высоту выступания цилиндрических выступов.
Когда поверхности первой и второй прокладок 32А и 32В, которые обращены к торцевым поверхностям части 12А в виде валика, названы передними поверхностями, по меньшей мере, передняя поверхность первой прокладки 32А подвергается обработке поверхности, такой как покрытие тефлоном (зарегистрированный товарный знак). Хотя это не проиллюстрировано, передняя поверхность второй прокладки 32В имеет неровности в виде поперечных канавок, образованных на ней так, что при воздействии напряжений при сдвиге в направлении вдоль окружности соответственно на поверхности пластин первой и второй прокладок 32А и 32В вторая прокладка 32В упруго деформируется легче, чем первая прокладка 32А.
Посредством использования вышеупомянутой обработки поверхности коэффициент статического трения между первой прокладкой 32А и соответствующей торцевой поверхностью части 12А в виде валика задают в качестве первого коэффициента µs1 статического трения, а коэффициент статического трения между второй прокладкой 32В и соответствующей торцевой поверхностью части 12А в виде валика задают в качестве второго коэффициента µs2 статического трения, который больше первого коэффициента µs1 статического трения. Аналогичным образом, коэффициент динамического трения между первой прокладкой 32А и соответствующей торцевой поверхностью части 12А в виде валика задают в качестве первого коэффициента µm1 динамического трения, а коэффициент динамического трения между второй прокладкой 32В и соответствующей торцевой поверхностью части 12А в виде валика задают в качестве второго коэффициента µm2 динамического трения, который больше первого коэффициента µm1 динамического трения. Первый коэффициент µs1 статического трения больше первого коэффициента µm1 динамического трения, и второй коэффициент µs2 статического трения больше второго коэффициента µm2 динамического трения.
Прижимающая сила, действующая на первую прокладку 32А со стороны части 12А в виде валика, и прижимающая сила, действующая на вторую прокладку 32В со стороны части 12А в виде валика, по существу одинаковы. Таким образом, максимальная сила статического трения между второй прокладкой 32В и частью 12А в виде валика превышает максимальную силу статического трения между первой прокладкой 32А и частью 12А в виде валика.
Что касается модулей упругости при упругих деформациях первой и второй прокладок 32А и 32В, которые зависят от наличия и отсутствия неровностей в виде вышеупомянутых канавок, то есть модулей упругости при упругих деформациях первой и второй прокладок 32А и 32В в направлении вдоль окружности, вызванных напряжениями при сдвиге, действующими на соответствующие поверхности пластин первой и второй прокладок 32А и 32В, то модули упругости первой и второй прокладок 32А и 32В заданы соответственно как К1 и К2. Модуль К2 упругости второй прокладки 32В меньше модуля К1 упругости первой прокладки 32А. Для того чтобы вторая прокладка 32В подвергалась упругой деформации легче, чем первая прокладка 32А, при воздействии напряжений при сдвиге в направлении вдоль окружности на поверхности пластин соответственно первой и второй прокладок 32А и 32В, минимальный модуль K2min упругости второй прокладки 32В может быть задан меньшим, чем минимальный модуль K1min упругости первой прокладки 32А. Средство для достижения данного соотношения между минимальными модулями K1min и K2min упругости не ограничено поперечными канавками, но может представлять собой параллельные канавки или радиальные канавки. Альтернативно, первая прокладка 32А и вторая прокладка 32В могут быть образованы из материалов с разными модулями упругости.
Как будет понятно из вышеприведенного описания, педальное устройство 10 акселератора по проиллюстрированному первому варианту осуществления может быть смоделировано как устройство с прямолинейным движением, как показано на фиг.3-5.
Когда относительная движущая сила Fp, действующая на рычаг 12 педали относительно опорного корпуса 14, равна максимальным силам Fs1max и Fs2max статического трения соответственно между первой и второй прокладками 32А и 32В и соответствующими торцевыми поверхностями части 12А в виде валика или меньше максимальных сил Fs1max и Fs2max статического трения, как показано на фиг.3, рычаг 12 педали не смещается относительно первой и второй прокладок 32А и 32В. Когда модуль K1 упругости первой прокладки 32А достаточно большой, величина упругой деформации первой прокладки 32А очень мала; таким образом, рычаг 12 педали также почти не смещается относительно опорного корпуса 14.
Напротив, когда относительная движущая сила Fp больше максимальной силы Fs1max статического трения между первой прокладкой 32А и соответствующей торцевой поверхностью части 12А в виде валика и равна или меньше максимальной силы Fs2max статического трения между второй прокладкой 32В и соответствующей торцевой поверхностью части 12А в виде валика, как показано на фиг.4, рычаг 12 педали смещается относительно первой прокладки 32А, но не смещается передней поверхности второй прокладки 32В. Тем не менее, поскольку вторая прокладка 32В упруго деформируется, рычаг 12 педали смещается относительно опорного корпуса 14. Относительное смещение увеличивается пропорционально увеличению относительной движущей силы Fp. Таким образом, вторая прокладка 32В также функционирует в качестве элемента для обеспечения смещения, который обеспечивает возможность перемещения второй пары поверхностей трения, имеющей больший коэффициент статического трения, чем первая пара поверхностей трения, совместно с относительным смещением рычага 12 педали относительно опорного корпуса 14. В данном случае направление упругой деформации элемента для обеспечения смещения представляет собой направление упругой деформации, вызванной напряжением, которое воздействует на элемент для обеспечения смещения при относительном смещении рычага 12 педали, который служит в качестве приводного элемента, в то время когда вторая пара поверхностей трения сохраняется в состоянии фрикционного взаимодействия (сцепления).
Кроме того, когда относительная движущая сила Fp превышает максимальную силу Fs2max статического трения между второй прокладкой 32В и соответствующей торцевой поверхностью части 12А в виде валика, как показано на фиг.5, рычаг 12 педали смещается как относительно первой прокладки 32А, так и относительно второй прокладки 32В, в результате чего рычаг 12 педали смещается относительно опорного корпуса 14 в довольно значительной степени. Поскольку трение между рычагом 12 педали и каждой из первой и второй прокладок 32А и 32В представляет собой динамическое трение, отношение увеличения относительного смещения рычага 12 педали к увеличению относительной движущей силы Fp больше, чем указанное отношение в состоянии, показанном на фиг.4.
Соответственно, в проиллюстрированном первом варианте осуществления зависимость между усилием F нажима, приложенным водителем к педальной части 12С рычага 12 педали, и ходом S педальной части 12С вокруг оси 22, то есть характеристика F-S, представляет собой характеристику с двумя перегибами в процессе увеличения усилия F нажима, как показано на фиг.6. Более точно, характеристическая кривая F-S по первому варианту осуществления имеет первый - третий линейные участки L1-L3, первую точку Р1 перегиба между первым линейным участком L1 и вторым линейным участком L2 и вторую точку Р2 перегиба между вторым линейным участком L2 и третьим линейным участком L3.
Усилие нажима, соответствующее максимальной силе статического трения, зависящей от первого коэффициента µs1 статического трения, принимают в качестве первого базового усилия Fs1 нажима, и усилие нажима, соответствующее максимальной силе статического трения, зависящей от второго коэффициента µs2 статического трения, принимают в качестве второго базового усилия Fs2 нажима (Fs2>Fs1). Первая точка Р1 перегиба соответствует случаю, в котором усилие F нажима по существу равно первому базовому усилию Fs1 нажима, и вторая точка Р2 перегиба соответствует случаю, в котором усилие F нажима по существу равно второму базовому усилию Fs2 нажима. Предпочтительно первое базовое усилие Fs1 нажима составляет от одной второй до двух третей включительно от второго базового усилия Fs2 нажима.
Угол наклона характеристической кривой F-S на первом линейном участке L1 имеет по существу бесконечно большую величину, и когда усилие F нажима равно первому базовому усилию Fs1 нажима или меньше него, ход S по существу равен 0 независимо от величины усилия F нажима. Другими словами, даже тогда, когда усилие F нажима изменяется в пределах изменений, не превышающих первого базового усилия Fs1 нажима, рычаг 12 педали не поворачивается относительно опорного корпуса 14 в такой степени, чтобы водитель мог ощутить это. Угол наклона характеристической кривой F-S на третьем линейном участке L3 меньше угла наклона характеристической кривой F-S на втором линейном участке L2. То есть отношение величины изменения ΔS хода S к величине изменения ΔF усилия F нажима, то есть ΔS/ΔF, больше на третьем линейном участке L3, на котором усилие F нажима больше второго базового усилия Fs2 нажима, чем на втором линейном участке L2, на котором усилие F нажима больше первого базового усилия Fs1 нажима и меньше второго базового усилия Fs2 нажима.
Отношение ΔS/ΔF на первом линейном участке L1 зависит от модуля K1 упругости первой прокладки 32А таким образом, что оно приближается к 0 по мере увеличения модуля K1 упругости и увеличивается по мере уменьшения модуля K1 упругости. Отношение ΔS/ΔF на первом линейном участке L1 необязательно равно 0, но может составлять одну вторую или менее, предпочтительно одну треть или менее, от отношения ΔS/ΔF на втором линейном участке L2 и одну пятую или менее, предпочтительно одну восьмую или менее, от отношения ΔS/ΔF на третьем линейном участке L3. Кроме того, отношение ΔS/ΔF на втором линейном участке L2 в два раза или более, предпочтительно в три раза или более, более предпочтительно в пять раз или более, превышает отношение ΔS/ΔF на третьем линейном участке L3.
Поскольку, как правило, коэффициент динамического трения меньше коэффициента статического трения, теоретически сила сопротивления мгновенно резко уменьшается при переходе от первого линейного участка L1 ко второму линейному участку L2 и при переходе от второго линейного участка L2 к третьему линейному участку L3. Однако в том случае, когда введенные во фрикционное взаимодействие элементы из смолы или тому подобного были подвергнуты обработке поверхности, такой как покрытие тефлоном (зарегистрированный товарный знак), элементы будут находиться во фрикционном взаимодействии (сцеплении) в множестве зон, если смотреть локально, и переход от статического трения к динамическому трению не происходит полностью и одновременно во множестве зон. Соответственно, в том случае, когда давление на поверхность контакта между частями, находящимися во фрикционном взаимодействии, невысокое, сила сопротивления не будет мгновенно резко уменьшаться заметным образом во время перехода от статического трения к динамическому трению. Эти замечания также применимы к другим вариантам осуществления, которые будут описаны далее.
Как показано на фиг.6, если принять ход S, который представляет собой базовую величину S0, превышающую ход S2 во второй точке Р2 перегиба, в качестве хода Smin, соответствующего полностью закрытому состоянию дроссельной заслонки, и принять ход S в тот момент, когда часть 12В, образующая первое плечо рычага 12 педали, находится в контакте с ограничителем 30 полного открытия, в качестве хода Smax, соответствующего полностью открытому состоянию дроссельной заслонки, датчик 20 открытия будет выдавать сигнал, характеризующий ход S, изменяющийся от Smin до Smax, непроиллюстрированному устройству управления двигателем.
Когда при использовании проиллюстрированного первого варианта осуществления водитель нажимает на рычаг 12 педали таким образом, что усилие F нажима увеличивается, например, до величины, находящейся на третьем линейном участке L3, затем уменьшается и снова увеличивается, характеристическая кривая F-S повторяет кривую гистерезиса, как показано на фиг.7. Чем больше первое базовое усилие Fs1 нажима, тем больше ширина петли гистерезиса для данной характеристической кривой F-S. В том случае, когда, как упомянуто выше, первое базовое усилие Fs1 нажима составляет от одной второй до двух третей включительно от второго базового усилия Fs2 нажима, может быть обеспечена достаточная ширина петли гистерезиса по сравнению со случаем, когда, например, первое базовое усилие Fs1 нажима составляет менее половины второго базового усилия Fs2 нажима. Как показано на фиг.7, даже в процессе уменьшения усилия F нажима характеристическая кривая F-S демонстрирует характеристику с двумя перегибами; тем не менее, соотношение величин углов наклона на первом и третьем линейных участках обратно указанному отношению в процессе увеличения усилия F нажима.
Когда усилие F нажима увеличивается, внутренняя пружина 16 и наружная пружина 18 действуют в направлении ограничения увеличения хода S. Когда усилие F нажима уменьшается, внутренняя и наружная пружины 16 и 18 действуют в направлении ускорения уменьшения хода S. Соответственно, чем больше жесткость внутренней пружины 16 или наружной пружины 18, тем больше угол наклона характеристической кривой F-S в то время, когда усилие F нажима увеличивается на третьем линейном участке L3, а также угол наклона характеристической кривой F-S в то время, когда ход S линейно уменьшается в результате уменьшения усилия F нажима.
Как правило, как показано на фиг.7, ширина петли гистерезиса для характеристической кривой F-S меньше первого базового усилия Fs1 нажима в то время, когда усилие F нажима увеличивается от 0. По-видимому, это обусловлено следующим: когда усилие F нажима увеличивается от 0, отношение плеч рычага 12 педали изменяется; однако после того, как отношение плеч рычага 12 педали изменится, отношение плеч рычага 12 педали будет оставаться неизменным даже тогда, когда усилие F нажима будет впоследствии увеличиваться или уменьшаться.
В частности, как было упомянуто ранее, поскольку имеющая вид валика часть 12А рычага 12 педали опирается на опорные части 14АА и 14АВ таким образом, что обеспечивается возможность ее поворота вокруг оси 22 относительно опорных частей, существует зазор между цилиндрической поверхностью части 12А в виде валика и цилиндрическими поверхностями опорных частей 14АА и 14АВ. Соответственно, точки контакта между имеющей вид валика частью 12А рычага 12 педали и опорными частями 14АА и 14АВ изменяются; таким образом изменяется отношение плеч рычага, который имеет точку приложения силы в педальной части 12С, точку опору в вышеупомянутой точке контакта и точку воздействия на конце части 12D, образующей второе плечо рычага. Тем не менее, даже тогда, когда усилие F нажима увеличивается или уменьшается в пределах изменений, превышающих величину усилия F нажима, при которой отношение плеч рычага изменяется, точки контакта между частью 12А в виде валика и опорными частями 14АА и 14АВ остаются неизменными, так что отношение плеч рычага остается неизменным.
Фиг.8 представляет собой разъясняющий вид, показывающий обычное исполнительное устройство с педальным управлением, которое моделируется в виде устройства с прямолинейным движением. В обычном исполнительном устройстве с педальным управлением, имеющем только участок, на котором сила сопротивления создается за счет силы статического трения, и участок, на котором сила сопротивления создается за счет силы динамического трения, зависимость между усилием F нажима, приложенным к педальной части рычага 12 педали, и ходом S педальной части вокруг оси поворота, то есть характеристика F-S, представляет собой характеристику с одним перегибом, как показано на фиг.9 и 10.
Таким образом, когда при использовании обычного исполнительного устройства с педальным управлением для облегчения поддержания величины нажима на педаль акселератора на уровне постоянной величины коэффициент трения между рычагом 12 педали и опорным корпусом 14 задан большим, как показано на фиг.9, усилие нажима, требуемое для начала поворота педали акселератора, становится чрезмерно большим; в результате водитель испытывает так называемое ощущение нажима на стену, когда он начинает нажимать на педаль акселератора. Кроме того, поскольку педаль акселератора не возвращается в исходное положение до тех пор, пока усилие нажима не будет значительно уменьшено, водитель испытывает странное ощущение во время ослабления нагрузки на педаль акселератора.
Напротив, когда коэффициент трения установлен низким, может быть ослаблено ощущение нажима на стену в момент начала нажатия на педаль акселератора и странное ощущение во время ослабления нагрузки на педаль акселератора. Тем не менее, как показано на фиг.10, в данном случае ширина петли гистерезиса становится небольшой; в результате, например, даже тогда, когда усилие F нажима незначительно изменяется при вибрации транспортного средства или тому подобном, ход S нажима на педаль акселератора изменяется. Следовательно, водитель сталкивается с трудностями при поддержании величины нажима на педаль акселератора на уровне постоянной величины, то есть возможность поддержания стабильности ухудшается.
Напротив, в соответствии с первым вариантом осуществления настоящего изобретения, как показано на фиг.6, характеристика F-S в процессе увеличения усилия F нажима представляет собой характеристику с двумя перегибами, имеющую первый - третий линейные участки L1-L3, первую точку Р1 перегиба между первым линейным участком L1 и вторым линейным участком L2 и вторую точку Р2 перегиба между вторым линейным участком L2 и третьим линейным участком L3. Кроме того, как показано на фиг.7, характеристика F-S в процессе уменьшения усилия F нажима представляет собой характеристику с двумя перегибами. Соответственно, по сравнению с обычным исполнительным устройством с педальным управлением исполнительное устройство с педальным управлением по первому варианту осуществления может обеспечить бóльшую легкость устойчивого поддержания величины нажима на рычаг 12 педали при одновременном ослаблении ощущения нажима на стену в момент начала нажатия на рычаг 12 педали и странного ощущения во время ослабления нагрузки на рычаг 12 педали.
В частности, поскольку педаль акселератора длиннее педали тормоза в то время, в течение которого педаль удерживается нажатой, водитель будет подвержен усталости при сохранении состояния нажима. Кроме того, существует тенденция возникновения колебаний усилия нажима, связанных с корректировкой позы при вождении, и внезапных колебаний усилия нажима, связанных с чиханьем или тому подобным. В случае вождения по неровной дороге сила инерции ноги или тому подобного может вызвать колебания давления нажима, приложенного к педали акселератора. В соответствии с первым вариантом осуществления настоящего изобретения даже при данных обстоятельствах колебания хода педали акселератора могут быть ограничены. В соответствии с результатами экспериментальных исследований, выполненных автором настоящего изобретения, в том случае, когда характеристика F-S представляет собой характеристику с двумя перегибами, если первое базовое усилие Fs1 нажима будет меньше половины второго базового усилия Fs2 нажима, нельзя будет достичь достаточного повышения легкости устойчивого поддержания величины нажима на рычаг 12 педали. Кроме того, если первое базовое усилие Fs1 нажима превышает две трети второго базового усилия Fs2 нажима, невозможно добиться достаточного ослабления ощущения нажима на стену в момент начала нажатия на рычаг 12 педали и ощущения дефектного возврата рычага 12 педали во время ослабления нагрузки на рычаг 12 педали.
Поскольку в соответствии с первым вариантом осуществления первое базовое усилие Fs1 нажима предпочтительно составляет одну вторую или более от второго базового усилия Fs2 нажима, легкость устойчивого поддержания величины нажима на рычаг 12 педали может быть надежным образом повышена, и поскольку первое базовое усилие Fs1 нажима предпочтительно составляет две трети или менее от второго базового усилия Fs2 нажима, ощущение нажима на стену в момент начала нажатия на рычаг 12 педали и ощущение дефектного возврата рычага 12 педали во время ослабления нагрузки на рычаг 12 педали могут быть уменьшены.
Кроме того, в соответствии с первым вариантом осуществления при принятии хода S педальной части 12С рычага 12 педали, который представляет собой базовую величину S0, превышающую ход S2 во второй точке Р2 перегиба, в качестве хода Smin, соответствующего полностью закрытому состоянию дроссельной заслонки, датчик 20 открытия определяет ход S, равный или превышающий Smin. Соответственно, зона, в которой датчик 20 открытия определяет ход S педальной части 12С рычага 12 педали, может быть надежным образом ограничена третьим линейным участком L3, на котором усилие F нажима и ход S пропорциональны друг другу с постоянным коэффициентом пропорциональности. Таким образом, по сравнению со случаем, в котором ход Smin, соответствующий полностью закрытому состоянию дроссельной заслонки, меньше хода S2 во второй точке Р2 перегиба, датчик 20 открытия может точно определить величину воздействия со стороны водителя.
Кроме того, в соответствии с первым вариантом осуществления угол наклона характеристической кривой F-S на первом линейном участке L1 представляет собой по существу бесконечно большую величину, и когда усилие F нажима равно первому базовому усилию Fs1 нажима или меньше него, ход S по существу равен 0 независимо от величины усилия F нажима. Соответственно, даже тогда, когда усилие F нажима изменяется в пределах изменений, не превышающих первого базового усилия Fs1 нажима, рычаг 12 педали не поворачивается относительно опорного корпуса 14 в такой степени, чтобы водитель мог ощутить это. Кроме того, в том случае, когда усилие F нажима увеличивается до значения, превышающего второе базовое усилие Fs2 нажима, и затем увеличивается или уменьшается, может быть установлена соответствующим образом величина участка, на котором ход S остается неизменным даже при увеличении или уменьшении усилия F нажима, то есть величина участка (зоны) на фиг.7, на котором увеличивается или уменьшается только усилие F нажима без изменения хода S.
Таким образом, даже тогда, когда усилие F нажима, приложенное к рычагу 12 педали, изменяется против воли водителя, может быть надежным образом ограничено ненужное относительное поворотное смещение рычага 12 педали относительно опорного корпуса 14, которое в противном случае могло бы происходить при колебаниях усилия нажима. Следовательно, может быть надежным образом повышена легкость устойчивого поддержания величины нажима на рычаг 12 педали и может быть надежным образом получена достаточно большая величина ширины петли гистерезиса, связанного с увеличением и уменьшением воздействующей силы.
В соответствии с первым вариантом осуществления угол наклона характеристической кривой F-S на третьем линейном участке L3 меньше угла наклона характеристической кривой F-S на втором линейном участке L2. Другими словами, отношение величины изменения ΔS хода S к величине изменения ΔF усилия F нажима, то есть ΔS/ΔF, больше на третьем линейном участке L3, на котором усилие F нажима больше второго базового усилия Fs2 нажима, чем на втором линейном участке L2, на котором усилие F нажима больше первого базового усилия Fs1 нажима и меньше второго базового усилия Fs2 нажима. Соответственно, во время увеличения усилия нажима после начала нажатия на рычаг 12 педали и во время уменьшения величины нажима на рычаг 12 педали после начала уменьшения усилия нажима может быть надежным образом предотвращено внезапное резкое увеличение относительного поворотного смещения рычага 12 педали относительно опорного корпуса 14 и соответствующее внезапное резкое увеличение переменной, подлежащей регулированию посредством операции нажима на рычаг 12 педали.
В соответствии с первым вариантом осуществления отношение величины изменения хода S к величине изменения усилия F нажима, то есть ΔS/ΔF, является постоянным на любом из первого линейного участка L1, второго линейного участка L2 и третьего линейного участка L3. Таким образом, когда усилие F нажима изменяется, отношение ΔS/ΔF изменяется плавно; соответственно, по сравнению со случаем, в котором характеристика F-S повторяет кривую линию, ход S можно легко регулировать посредством регулирования усилия нажима.
В соответствии с первым вариантом осуществления первая прокладка 32А и вторая прокладка 32В разнесены друг от друга в направлении вдоль оси 22 и расположены с соответствующих противоположных сторон от той центральной оси 12Е рычага 12 педали, которая перпендикулярна оси 22. Соответственно, силы трения между первой и второй прокладками 32А и 32В и соответствующими торцевыми поверхностями имеющей вид валика части 12А рычага 12 педали и силы реакции, возникающие в результате упругих деформаций, могут быть созданы с противоположных сторон от центральной оси 12Е. Таким образом, например, по сравнению со случаем, в котором первая прокладка 32А и вторая прокладка 32В не разнесены друг от друга в направлении вдоль оси 22, и случаем, в котором как первая прокладка 32А, так и вторая прокладка 32В расположены с одной стороны относительно центральной оси 12Е, концентрация сил трения и сил реакции, возникающих в результате упругих деформаций, может быть надежным образом уменьшена, и моменты, которые действуют на рычаг 12 педали вследствие сил трения и сил реакции, возникающих в результате упругих деформаций, могут быть надежным образом уменьшены.
В соответствии с первым вариантом осуществления первая прокладка 32А и вторая прокладка 32В расположены между торцевыми поверхностями имеющей вид валика части 12А рычага 12 педали и соответствующими опорными частями 14АВ и 14ВВ опорного корпуса 14, и заданная характеристика F-S достигается за счет сил трения между прокладками и торцевыми поверхностями имеющей вид валика части 12А рычага 12 педали, упругих деформаций и сил реакции, возникающих в результате упругих деформаций. Таким образом, по сравнению с конструкцией, в которой первая прокладка 32А и вторая прокладка 32В не установлены, и торцевые поверхности имеющей вид валика части 12А рычага 12 педали и опорные части 14АВ и 14ВВ опорного корпуса 14 находятся в непосредственном фрикционном контакте друг с другом, коэффициент трения и модуль упругости могут быть легко и надежно установлены на уровне соответствующих надлежащих величин.
Когда нагрузка приложена к рычагу 12 педали в направлении вдоль оси 22, одно давление из давления на поверхность контакта между одной торцевой поверхностью части 12А в виде валика и первой прокладкой 32А и давления на поверхность контакта между другой торцевой поверхностью части 12А в виде валика и второй прокладкой 32В увеличивается, в то время как другое давление на поверхность контакта уменьшается. Таким образом, по сравнению с конструкцией, в которой даже в том случае, когда одно давление на поверхность контакта увеличивается, другое давление на поверхность контакта не уменьшается, может быть надежным образом уменьшена величина колебаний суммарной силы трения, действующей на рычаг 12 педали, то есть колебаний, являющихся результатом действия нагрузки, которая приложена к рычагу 12 педали в направлении вдоль оси 22.
В частности, в соответствии с первым вариантом осуществления первая прокладка 32А и вторая прокладка 32В расположены вблизи оси 22 рычага 12 педали. Таким образом, по сравнению со случаем, в котором средства для создания первой и второй сил сопротивления расположены в местах, находящихся на значительном расстоянии в радиальном направлении от оси 22 (например, в третьем и четвертом вариантах осуществления, которые будут описаны позже), когда рычаг 12 педали подвергается действию рычага, может быть надежным образом уменьшена величина колебаний давлений на поверхности контакта первой и второй прокладок 32А и 32В, так что величина колебаний сил трения может быть надежным образом уменьшена.
Второй вариант осуществления изобретения
Фиг.11 представляет собой горизонтальное сечение, показывающее второй вариант осуществления исполнительного устройства с педальным управлением в соответствии с настоящим изобретением, при этом устройство выполнено в виде педального устройства акселератора автомобиля типа устройства с электрическим управлением системой привода. На фиг.11 элементы, аналогичные элементам, имеющимся на фиг.1 и 2, обозначены аналогичными ссылочными позициями, имеющимися на фиг.1 и 2, и это применимо к другим вариантам осуществления, которые будут описаны позже.
В данном втором варианте осуществления болт 36 проходит вдоль оси 22 через основной элемент 14А корпуса, вспомогательный элемент 14В корпуса, имеющую вид валика часть 12А рычага 12 педали, первую прокладку 32А и вторую прокладку 32В. Гайка 38 введена в резьбовое соединение с концевой частью болта 36, противоположной по отношению к головке болта 36. Хотя это не проиллюстрировано на фиг.11, датчик открытия в данном варианте осуществления определяет угол относительного поворота рычага 12 педали вокруг оси 22 относительно опорного корпуса 14 в месте, находящемся на определенном расстоянии в радиальном направлении от оси 22, в результате чего определяется величина воздействия на рычаг 12 педали.
Другие конструктивные признаки второго варианта осуществления аналогичны конструктивным признакам первого варианта осуществления. Соответственно, второй вариант осуществления функционирует аналогично первому варианту осуществления. Таким образом, второй вариант осуществления может обеспечить действия и эффекты, аналогичные действиям и эффектам вышеописанного первого варианта осуществления.
В частности, в соответствии со вторым вариантом осуществления посредством регулировки крутящего момента затяжки болта 36 и гайки 38 вместе можно отрегулировать прижимающие силы, действующие на первую и вторую прокладки 32А и 32В посредством основного элемента 14А корпуса и вспомогательного элемента 14В корпуса. Таким образом, посредством регулирования давлений на поверхности контакта между торцевыми поверхностями имеющей вид валика части 12А рычага 12 педали и первой и второй прокладками 32А и 32В можно регулировать силы трения между ними. Таким образом, в том, что касается усилия F нажима, можно регулировать величину первого линейного участка L1 и величину второго линейного участка L2.
Третий вариант осуществления изобретения
Фиг.12 представляет собой горизонтальное сечение, показывающее третий вариант осуществления исполнительного устройства с педальным управлением в соответствии с настоящим изобретением, при этом устройство выполнено в виде педального устройства акселератора автомобиля типа устройства с электрическим управлением системой привода. Фиг.13 представляет собой вид сбоку, показывающий третий вариант осуществления при удаленном вспомогательном элементе корпуса.
В соответствии с третьим вариантом осуществления для избежания фрикционного взаимодействия торцевых поверхностей имеющей вид валика части 12А рычага 12 педали с основным элементом 14А корпуса и вспомогательным элементом 14В корпуса вместо первой прокладки 32А и второй прокладки 32В антифрикционные шайбы 33А и 33В расположены соответственно между торцевыми поверхностями имеющей вид валика части 12А рычага 12 педали и основным элементом 14А корпуса и вспомогательным элементом 14В корпуса. Данный конструктивный признак также применяется для четвертого варианта осуществления, который будет описан позже.
В третьем варианте осуществления выступающий конец части 12D, образующей второе плечо рычага 12 педали, вилкообразно разделяется на первый выступ 40А и второй выступ 40В, которые разнесены друг от друга в направлении вдоль оси 22. Часть основного элемента 14А корпуса, представляющая собой периферийную стенку, имеет частично цилиндрические зоны, которые являются частично цилиндрическими относительно оси 22 и обращены к первому выступу 40А и второму выступу 40В, когда рычаг 12 педали поворачивается вокруг оси 22.
Первая фрикционная пластина 42А и вторая фрикционная пластина 42В закреплены на внутренних поверхностях частично цилиндрических зон части основного элемента 14А корпуса, представляющей собой периферийную стенку, посредством скрепляющих средств, таких как склеивание, таким образом, чтобы они проходили дугообразно в направлении вдоль окружности вокруг оси 22. Первая фрикционная пластина 42А и вторая фрикционная пластина 42В разнесены друг от друга в направлении вдоль оси 22 и находятся в контакте соответственно с первым выступом 40А и вторым выступом 40В.
Первая фрикционная пластина 42А служит в качестве средства для приложения первой силы сопротивления, предназначенного для приложения первой силы сопротивления, противодействующей повороту рычага 12 педали относительно опорного корпуса 14. Вторая фрикционная пластинная 42В служит в качестве средства для приложения второй силы сопротивления, предназначенного для приложения второй силы сопротивления, противодействующей повороту рычага 12 педали относительно опорного корпуса 14.
Первая фрикционная пластина 42А и вторая фрикционная пластина 42В образованы из одинаковой смолы. Тем не менее, поскольку первая фрикционная пластина 42А и вторая фрикционная пластина 42В конструктивно аналогичны первой прокладке 32А и второй прокладке 32В в вышеописанном первом варианте осуществления, соотношение между первой фрикционной пластиной 42А и второй фрикционной пластиной 42В аналогично соотношению между первой прокладкой 32А и второй прокладкой 32В в отношении коэффициента трения между первой фрикционной пластиной 42А и первым выступом 40А и коэффициента трения между второй фрикционной пластиной 42В и вторым выступом 40В и в отношении модуля упругости частей, подвергающихся упругой деформации, связанной с относительными движениями данных элементов вокруг оси 22.
Таким образом, поверхность первой фрикционной пластины 42А и поверхность первого выступа 40А, которые введены во фрикционное взаимодействие друг с другом, образуют первую пару поверхностей трения, предназначенную для создания первой силы сопротивления посредством силы трения. Поверхность второй фрикционной пластины 42В и поверхность второго выступа 40В, которые введены во фрикционное взаимодействие друг с другом, образуют вторую пару поверхностей трения, предназначенную для создания второй силы сопротивления посредством силы трения. Вторая фрикционная пластина 42В также служит в качестве элемента для обеспечения смещения, который за счет его упругой деформации обеспечивает возможность перемещения второй пары поверхностей трения, имеющей больший коэффициент статического трения, вместе с относительным смещением рычага 12 педали относительно опорного корпуса 14. Таким образом, в соответствии с проиллюстрированным третьим вариантом осуществления первая часть для обеспечения фрикционного взаимодействия, образованная первым выступом 40А и первой фрикционной пластиной 42А, и вторая часть для обеспечения фрикционного взаимодействия, образованная вторым выступом 40В и второй фрикционной пластиной 42В, разнесены в радиальном направлении от оси 22 в большей степени, чем в случае вышеописанного первого варианта осуществления. Следовательно, помимо обеспечения действий и достижения эффектов, аналогичных действиям и эффектам по вышеописанному первому варианту осуществления, первая и вторая силы сопротивления для получения заданной характеристики F-S могут быть гарантированы без необходимости увеличения сил трения, создаваемых первой и второй частями, предназначенными для обеспечения фрикционного взаимодействия, и силы реакции, возникающей в результате упругой деформации, до такой степени, как в случае вышеописанного первого варианта осуществления.
Четвертый вариант осуществления изобретения
Фиг.14 представляет собой горизонтальное сечение, показывающее четвертый вариант осуществления исполнительного устройства с педальным управлением в соответствии с настоящим изобретением, при этом устройство выполнено в виде педального устройства акселератора автомобиля типа устройства с электрическим управлением системой привода. Фиг.15 представляет собой вид сбоку, показывающий четвертый вариант осуществления при удаленном вспомогательном элементе корпуса.
В то время как в четвертом варианте осуществления выступающий конец части 12D, образующей второе плечо рычага 12 педали, выполнен аналогично выступающему концу части 12D, образующей второе плечо рычага 12 педали, в вышеописанном первом варианте осуществления первая фрикционная пластина 44А и вторая фрикционная пластина 44В, которые обе выполнены в виде плоской пластины, закреплены на внутренних поверхностях стенок соответственно основного элемента 14А корпуса и вспомогательного элемента 14В корпуса посредством скрепляющих средств, таких как склеивание, при этом внутренние поверхности стенок обращены к части 12В, образующей первое плечо рычага 12 педали. Первая фрикционная пластина 44А и вторая фрикционная пластина 44В проходят дугообразно вокруг оси 22 в соответствующих местах, находящихся на небольшом расстоянии в радиальном направлении от наружной окружной периферии имеющей вид валика части 12А рычага 12 педали.
Аналогично первой и второй прокладкам 32А и 32В в вышеописанном первом варианте осуществления и первой и второй фрикционным пластинам 42А и 42В в вышеописанном третьем варианте осуществления первая и вторая фрикционные пластины 44А и 44В по четвертому варианту осуществления также служат в качестве средств для приложения соответственно первой и второй сил сопротивления, предназначенных для приложения первой и второй сил сопротивления, противодействующих повороту рычага 12 педали относительно опорного корпуса 14.
В четвертом варианте осуществления первая фрикционная пластина 44А и вторая фрикционная пластина 44В также образованы из одинаковой смолы (полимера). Тем не менее, поскольку первая фрикционная пластина 44А и вторая фрикционная пластина 44В конструктивно аналогичны первой прокладке 32А и второй прокладке 32В в вышеописанном первом варианте осуществления, соотношение между первой фрикционной пластиной 44А и второй фрикционной пластиной 44В аналогично соотношению между первой прокладкой 32А и второй прокладкой 32В в отношении коэффициента трения между первой фрикционной пластиной 44А и частью 12В, образующей первое плечо рычага 12 педали, и коэффициента трения между второй фрикционной пластиной 44В и частью 12В, образующей первое плечо рычага, и в отношении модуля упругости частей, подвергающихся упругой деформации, связанной с относительными движениями данных элементов вокруг оси 22.
Соответственно, поверхность первой фрикционной пластины 44А и поверхность части 12В, образующей первое плечо рычага, которые введены во фрикционное взаимодействие друг с другом, образуют первую пару поверхностей трения, предназначенную для создания первой силы сопротивления посредством силы трения. Поверхность второй фрикционной пластины 44В и поверхность части 12В, образующей первое плечо рычага, которые введены во фрикционное взаимодействие друг с другом, образуют вторую пару поверхностей трения, предназначенную для создания второй силы сопротивления посредством силы трения. Вторая фрикционная пластина 44В также служит в качестве элемента для обеспечения смещения, который за счет его упругой деформации обеспечивает возможность перемещения второй пары поверхностей трения, имеющей больший коэффициент статического трения, вместе с относительным смещением рычага 12 педали относительно опорного корпуса 14.
Таким образом, в соответствии с проиллюстрированным четвертым вариантом осуществления аналогично вышеописанному третьему варианту осуществления первая часть для обеспечения фрикционного взаимодействия, образованная частью 12В, образующей первое плечо рычага 12 педали, и первой фрикционной пластиной 44А, и вторая часть для обеспечения фрикционного взаимодействия, образованная частью 12В, образующей первое плечо рычага 12 педали, и второй фрикционной пластиной 44В, разнесены в радиальном направлении от оси 22 по сравнению со случаем вышеописанного первого варианта осуществления. Следовательно, помимо обеспечения действий и достижения эффектов, аналогичных действиям и эффектам по вышеописанному первому варианту осуществления, первая и вторая силы сопротивления для получения заданной характеристики F-S могут быть гарантированы без необходимости увеличения сил трения, создаваемых первой и второй частями, предназначенными для обеспечения фрикционного взаимодействия, и силы реакции, возникающей в результате упругой деформации, до такой степени, как в случае вышеописанного первого варианта осуществления.
Пятый вариант осуществления изобретения
Фиг.16 представляет собой горизонтальное сечение, показывающее в упрощенном виде пятый вариант осуществления исполнительного устройства с педальным управлением в соответствии с настоящим изобретением, при этом устройство выполнено в виде педального устройства акселератора автомобиля типа устройства с электрическим управлением системой привода.
В пятом варианте осуществления рычаг 12 педали опирается на опорный корпус 14 таким образом, чтобы обеспечить возможность его возвратно-поступательного движения вдоль центральной оси 12Е. Первая фрикционная пластина 46А и вторая фрикционная пластина 46В служат соответственно в качестве средства для приложения первой силы сопротивления и средства для приложения второй силы сопротивления, предназначенных для приложения первой силы сопротивления и второй силы сопротивления, противодействующих относительному прямолинейному движению рычага 12 педали относительно опорного корпуса 14. Датчик 20 открытия представляет собой датчик смещения, предназначенный для определения относительного прямолинейного смещения рычага 12 педали в направлении вдоль оси 22 относительно опорного корпуса 14, чтобы тем самым определить величину воздействия на рычаг 12 педали. Другие конструктивные признаки пятого варианта осуществления аналогичны конструктивным признакам вышеописанного четвертого варианта осуществления.
Соответственно, поверхность первой фрикционной пластины 46А и поверхность рычага 12 педали, которые введены во фрикционное взаимодействие друг с другом, образуют первую пару поверхностей трения, предназначенную для создания первой силы сопротивления посредством силы трения. Поверхность второй фрикционной пластины 46В и поверхность рычага 12 педали, которые введены во фрикционное взаимодействие друг с другом, образуют вторую пару поверхностей трения, предназначенную для создания второй силы сопротивления посредством силы трения. Вторая фрикционная пластина 46В также служит в качестве элемента для обеспечения смещения, который за счет его упругой деформации обеспечивает возможность перемещения второй пары поверхностей трения, имеющей больший коэффициент статического трения, вместе с относительным смещением рычага 12 педали относительно опорного корпуса 14.
Таким образом, в соответствии с проиллюстрированным пятым вариантом осуществления, помимо обеспечения действий и достижения эффектов, аналогичных действиям и эффектам по вышеописанному первому варианту осуществления, даже совершающее возвратно-поступательное движение исполнительное устройство с педальным управлением может надежным образом обеспечить заданную характеристику F-S.
В вышеописанных первом-пятом вариантах осуществления давления на поверхности контакта первой и второй частей, предназначенных для обеспечения фрикционного взаимодействия, постоянны независимо от угла поворота рычага 12 педали относительно опорного корпуса 14. Однако настоящее изобретение может быть модифицировано таким образом, что по мере увеличения угла поворота рычага 12 педали относительно опорного корпуса 14 давления на поверхности контакта первой и второй частей, предназначенных для обеспечения фрикционного взаимодействия, будут постепенно увеличиваться. В данном случае по мере увеличения хода S педальной части 12С рычага 12 педали максимальная сила статического трения, создаваемая первой частью для обеспечения фрикционного взаимодействия, увеличивается; таким образом, значения ширины петли гистерезиса для первой и второй частей, предназначенных для обеспечения фрикционного взаимодействия, будут постепенно увеличиваться вместе с ходом S, например, как показано на фиг.17.
В вышеописанных первом - пятом вариантах осуществления фрикционные элементы, такие как первая прокладка 32А и вторая прокладка 32В, не смещаются относительно опорного корпуса 14, а смещаются относительно рычага 12 педали и введены во фрикционное взаимодействие с рычагом 12 педали. Однако данная конфигурация может быть модифицирована следующим образом: фрикционные элементы не смещаются относительно рычага 12 педали, а смещаются относительно опорного корпуса 14 и введены во фрикционное взаимодействие с опорным корпусом 14.
В вышеописанных первом-пятом вариантах осуществления фрикционные элементы, такие как первая прокладка 32А и вторая прокладка 32В, выполнены отдельно от рычага 12 педали и опорного корпуса 14. Однако фрикционные элементы могут быть устранены, и обработка поверхности и придание модуля упругости, аналогичные обработке поверхности и приданию модуля упругости, которые были выполнены для первой прокладки 32А и второй прокладки 32В, могут быть выполнены непосредственно на одной зоне или на обеих зонах из зоны рычага 12 педали и зоны опорного корпуса 14, которые введены во фрикционное взаимодействие друг с другом.
В вышеописанном втором варианте осуществления прижимающие силы, действующие на первую прокладку 32А и вторую прокладку 32В, могут быть отрегулированы одновременно. Однако данная конфигурация может быть модифицирована следующим образом: давления на поверхности контакта двух фрикционных элементов, таких как первая прокладка 32А и вторая прокладка 32В, могут быть отрегулированы по отдельности. В вышеописанных третьем-пятом вариантах осуществления средства для регулирования давлений на поверхности контакта фрикционных элементов не предусмотрены, однако данная конфигурация может быть модифицирована так, чтобы обеспечить возможность регулирования давлений на поверхности контакта фрикционных элементов одновременно или по отдельности.
Шестой вариант осуществления изобретения
Фиг.18 представляет собой вид сбоку, показывающий шестой вариант осуществления исполнительного устройства с педальным управлением в соответствии с настоящим изобретением, при этом устройство выполнено в виде педального устройства акселератора автомобиля типа устройства с электрическим управлением системой привода. Фиг.19 и 20 представляют собой соответственно увеличенный частичный вид сзади и увеличенный частичный вид снизу, показывающие шестой вариант осуществления.
На данных чертежах ссылочной позицией 50 обозначено все педальное устройство акселератора. Педальное устройство 50 акселератора имеет рычаг 52 педали, который служит в качестве приводного элемента, подлежащего приведению в действие ногой, и опорный кронштейн 54, который служит в качестве опорного средства для обеспечения опоры для рычага 52 педали с возможностью поворота. Кроме того, педальное устройство 50 акселератора имеет первую цилиндрическую винтовую пружину 56 и вторую цилиндрическую винтовую пружину 58, которые служат соответственно в качестве первого возвратного поджимающего средства и второго возвратного поджимающего средства, предназначенных для принудительного поворота рычага 52 педали относительно опорного кронштейна 54 в направлении, противоположном направлению увеличения величины воздействия на рычаг 52 педали, и датчик 60 открытия, который служит в качестве средства для определения величины воздействия на рычаг 52 педали.
В шестом варианте осуществления рычаг 52 педали имеет прямоугольную плоскую пластинчатую часть 52А и часть 52В, представляющую собой периферийную стенку. Часть 52В, представляющая собой периферийную стенку, простирается вдоль периферии плоской пластинчатой части 52А и перпендикулярно плоской пластинчатой части 52А со стороны, противоположной по отношению к поверхности нажима (верхней поверхности, если смотреть на фиг.18 и фиг.19) плоской пластинчатой части 52А. Часть 52В, представляющая собой периферийную стенку, образует две поворотные части 52С рычага 52 педали на нижней концевой части рычага 52 педали. Две поворотные части 52С простираются параллельно друг другу. На фиг.20 ссылочная позиция 52D обозначает среднюю линию по ширине рычага 52 педали. Ссылочная позиция 52Е обозначает усиливающее ребро (ребро жесткости), предусмотренное на задней поверхности плоской пластинчатой части 52А и простирающееся вдоль средней линии 52D.
Опорный кронштейн 54 имеет базовую часть 54А, выполненную в виде прямоугольной плоской плиты и прикрепленную к непроиллюстрированному кузову транспортного средства болтами или тому подобным, и две опоры 54В, образованные за одно целое с базовой частью 54А и выступающие перпендикулярно от базовой части 54А и параллельно друг другу. Две опоры 54В расположены на соответствующих дальних сторонах относительно двух поворотных частей 52С рычага 52 педали. Для поверхности каждой поворотной части 52С и поверхности каждой опоры 54В, которые обращены друг к другу, обеспечен низкий коэффициент трения посредством подвергания их обработке поверхности, такой как покрытие тефлоном (зарегистрированный товарный знак).
Осевой стержень 62 проходит вдоль оси 64 через две поворотные части 52С и две опоры 54В; таким образом, рычаг 52 педали опирается на опорный кронштейн 54 таким образом, что обеспечивается возможность его поворота вокруг оси 64. Для предотвращения выхода осевого стержня 62 из поворотной части 52С и опоры 54В средство для предотвращения отсоединения, такое как гайка, штифт или пружинное стопорное кольцо, хотя и не проиллюстрированное, присоединено к концевой части осевого стержня 62, противоположной по отношению к головке осевого стержня 62.
Плита 66 для крепления пружин образована за одно целое с базовой частью 54А опорного кронштейна 54. Первая цилиндрическая винтовая пружина 56 имеет неупругие части 56В и 56С на соответствующих противоположных концах спиральной части 56А, прикреплена на дистальном конце неупругой части 56В к плите 66 для крепления пружин и прикреплена на дистальном конце неупругой части 56С к нижнему концу плоской пластинчатой части 52А рычага 52 педали. Аналогичным образом вторая цилиндрическая винтовая пружина 58 имеет неупругие части 58В и 58С на соответствующих противоположных концах спиральной части 58А, прикреплена на дистальном конце неупругой части 58В к плите 66 для крепления пружин и прикреплена на дистальном конце неупругой части 58С к нижнему концу плоской пластинчатой части 52А рычага 52 педали. Первая цилиндрическая винтовая пружина 56 и вторая цилиндрическая винтовая пружина 58 разнесены друг от друга в направлении вдоль оси 64 и проходят в направлении, которое пересекает ось 64, если смотреть сверху.
Первая цилиндрическая винтовая пружина 56 и вторая цилиндрическая винтовая пружина 58 представляют собой цилиндрические винтовые пружины растяжения; таким образом, рычаг 52 педали поджимается в направлении против часовой стрелки вокруг оси 64, если смотреть на фиг.18. Наружные поверхности парных поворотных частей 52С рычага 52 педали имеют соответствующие ограничители 68, образованные за одно целое с ними. В состоянии, в котором усилие нажима не приложено к рычагу 52 педали, ограничители 68 находятся в контакте с периферийными частями соответствующих опор 54В опорного кронштейна 54, в результате чего обеспечивается установка рычага 52 педали в его исходном положении относительно опорного кронштейна 54.
Первый элемент 70А для обеспечения скользящего контакта, который служит в качестве средства для создания первой силы сопротивления, и второй элемент 70В для обеспечения скользящего контакта, который служит в качестве средства для создания второй силы сопротивления, прикреплены к нижней концевой части рычага 52 педали со стороны, противоположной по отношению к поверхности нажима. Толщина элементов 70А и 70В для обеспечения скользящего контакта постепенно увеличивается по направлению к их нижним концам, и элементы 70А и 70В для обеспечения скользящего контакта имеют соответственно первую канавку 72 для обеспечения скользящего контакта и вторую канавку 74 для обеспечения скользящего контакта, образованные на их нижних концевых частях. Первая и вторая канавки 72 и 74 для обеспечения скользящего контакта разнесены друг от друга в направлении вдоль оси 64 и проходят в направлении, которое пересекает ось 64, если смотреть сверху.
Как первая, так и вторая канавки 72 и 74 для обеспечения скользящего контакта имеют по существу полукруглое или U-образное поперечное сечение и в них входят соответственно спиральная часть 56А первой цилиндрической винтовой пружины 56 и спиральная часть 58А второй цилиндрической винтовой пружины 58 в таком состоянии, чтобы обеспечить незначительный поджим спиральных частей 56А и 58А вниз на чертеже. Кроме того, первая и вторая канавки 72 и 74 для обеспечения скользящего контакта имеют достаточную длину для приема спиральной части 56А первой цилиндрической винтовой пружины 56 и спиральной части 58А второй цилиндрической винтовой пружины 58 в состоянии контакта на всей их длине даже тогда, когда первая и вторая цилиндрические винтовые пружины 56 и 58 растягиваются и сжимаются при повороте рычага 52 педали относительно опорного кронштейна 54.
Первая и вторая канавки 72 и 74 для обеспечения скользящего контакта проходят по существу дугообразно вокруг оси 64, однако расстояние между осью 64 и нижней частью каждой из первой и второй канавок 72 и 74 для обеспечения скользящего контакта постепенно увеличивается в направлении вправо, если смотреть на фиг.18. Соответственно, когда рычаг 52 педали поворачивается из исходного положения по часовой стрелке вокруг оси 64, если смотреть на фиг.18, силы, с которыми поверхности первой и второй канавок 72 и 74 для обеспечения скользящего контакта прижимают вниз соответственно первую и вторую цилиндрические винтовые пружины 56 и 58, постепенно увеличиваются.
Как подробно показано на фиг.20, первая цилиндрическая винтовая пружина 56 имеет спиральную часть 54А и прямолинейную часть 56В, 56С, которые образуют одно целое друг с другом, прикреплена на дистальном конце прямолинейной части 56С к нижнему концу плоской пластинчатой части 52А рычага 52 педали и прикреплена на дистальном конце прямолинейной части 56В к плите 66 для крепления пружин. Прямолинейные части 56В и 56С по существу не подвергаются упругому деформированию в направлении расширения-сжатия пружины. Поверхность первой канавки 72 для обеспечения скользящего контакта входит в контакт с концевой частью спиральной части 56А первой цилиндрической винтовой пружины 56, расположенной со стороны прямолинейной части 56В, независимо от положения рычага 52 педали при его повороте. Вторая цилиндрическая винтовая пружина 58 имеет те же конструктивные признаки (элементы), что и первая цилиндрическая винтовая пружина 56.
Кроме того, в данном варианте осуществления рычаг 52 педали, опорный кронштейн 54 и элементы 70А и 70В для обеспечения скользящего контакта могут быть выполнены или из смолы, или из металла. Тем не менее, предпочтительно, по меньшей мере, элементы 70А и 70В для обеспечения скользящего контакта образованы из смолы. Предпочтительно модуль K1 упругости смолы, используемой для образования элемента 70А для обеспечения скользящего контакта, сравнительно большой, а модуль K2 упругости смолы, используемой для образования элемента 70В для обеспечения скользящего контакта, меньше модуля K1 упругости смолы, используемой для образования элемента 70А для обеспечения скользящего контакта.
Для поверхностей первой и второй канавок 72 и 74 для обеспечения скользящего контакта, выполненных в элементах 70А и 70В для обеспечения скользящего контакта, обеспечен низкий коэффициент трения за счет выполнения обработки поверхности, такой как покрытие тефлоном (зарегистрированный товарный знак). В частности, коэффициент статического трения поверхности первой канавки 72, предназначенной для обеспечения скользящего контакта, относительно первой цилиндрической винтовой пружины 56 (первый коэффициент µs1 статического трения) задан меньшим, чем коэффициент статического трения поверхности второй канавки 74, предназначенной для обеспечения скользящего контакта, относительно второй цилиндрической винтовой пружины 58 (второй коэффициент µs2 статического трения).
Прижимающая сила, с которой первая цилиндрическая винтовая пружина 56 давит на поверхность первой канавки 72 для обеспечения скользящего контакта, и прижимающая сила, с которой вторая цилиндрическая винтовая пружина 58 давит на поверхность второй канавки 74 для обеспечения скользящего контакта, по существу эквивалентны друг другу. Соответственно, максимальная сила статического трения между второй цилиндрической винтовой пружиной 58 и поверхностью второй канавки 74 для обеспечения скользящего контакта превышает максимальную силу статического трения между первой цилиндрической винтовой пружиной 56 и поверхностью первой канавки 72 для обеспечения скользящего контакта.
Таким образом, поверхность первой канавки 72 для обеспечения скользящего контакта, выполненной в первом элементе 70А для обеспечения скользящего контакта, и поверхность первой цилиндрической винтовой пружины 56, которые введены во фрикционное взаимодействие друг с другом, образуют первую пару поверхностей трения, предназначенную для создания первой силы сопротивления посредством силы трения. Поверхность второй канавки 74 для обеспечения скользящего контакта, выполненной во втором элементе 70В для обеспечения скользящего контакта, и поверхность второй цилиндрической винтовой пружины 58, которые введены во фрикционное взаимодействие друг с другом, образуют вторую пару поверхностей трения, предназначенную для создания второй силы сопротивления посредством силы трения. Второй элемент 70В для обеспечения скользящего контакта также служит в качестве элемента для обеспечения смещения, который за счет его упругой деформации обеспечивает возможность перемещения второй пары поверхностей трения, имеющей больший коэффициент статического трения, при относительном смещении рычага 52 педали относительно опорного кронштейна 54.
Как будет понятно из вышеприведенного описания, педальное устройство 50 акселератора по шестому варианту осуществления может быть смоделировано в виде устройства с прямолинейным движением, как показано на фиг.21-23.
Когда при использовании шестого варианта осуществления водитель прикладывает усилие Fp нажима к рычагу 52 педали, рычаг 52 педали «пытается» повернуться из исходного положения в направлении по часовой стрелке вокруг оси 64, если смотреть на фиг.18, и «пытается» переместиться влево относительно опорного кронштейна 54, если смотреть на фиг.21-23. Однако поверхность первой канавки 72 для обеспечения скользящего контакта введена во фрикционное взаимодействие с концевой частью спиральной части первой цилиндрической винтовой пружины 56, которая расположена со стороны прямолинейной части первой цилиндрической винтовой пружины 56. Соответственно, когда сила, действующая на поверхность первой канавки 72, предназначенной для обеспечения скользящего контакта, относительно спиральной части первой цилиндрической винтовой пружины 56, равна максимальной силе статического трения между ними или меньше нее, рычаг 52 педали по существу не поворачивается, если смотреть на фиг.18, и, как показано на фиг.21, не перемещается относительно опорного кронштейна 54.
Когда сила, действующая на поверхность первой канавки 72, предназначенной для обеспечения скользящего контакта, относительно спиральной части первой цилиндрической винтовой пружины 56, превысит максимальную силу статического трения между ними, спиральная часть 56А первой цилиндрической винтовой пружины 56 смещается относительно первой канавки 72 для обеспечения скользящего контакта. Соответственно, рычаг 52 педали поворачивается вокруг оси 64, если смотреть на фиг.18, и, как показано на фиг.22, перемещается влево относительно опорного кронштейна 54.
Однако, поскольку поверхность второй канавки 74 для обеспечения скользящего контакта введена во фрикционное взаимодействие со спиральной частью 58А второй цилиндрической винтовой пружины 58, в данной части для обеспечения фрикционного взаимодействия вторая цилиндрическая винтовая пружина 58 не смещается относительно второй канавки 74 для обеспечения скользящего контакта, и спиральная часть 58А второй цилиндрической винтовой пружины 58 расширяется за счет упругой деформации элемента 70В для обеспечения скользящего контакта. Таким образом, в данном состоянии упругими силами, которые стремятся вернуть рычаг 52 педали в исходное положение, являются упругая сила, создаваемая первой цилиндрической винтовой пружиной 56, упругая сила, создаваемая второй цилиндрической винтовой пружиной 58, и упругая сила, создаваемая элементом 70В для обеспечения скользящего контакта.
Когда сила, действующая на поверхность второй канавки 74, предназначенной для обеспечения скользящего контакта, относительно спиральной части второй цилиндрической винтовой пружины 58, превысит максимальную силу статического трения между ними, как показано на фиг.23, спиральная часть 58А второй цилиндрической винтовой пружины 58 смещается относительно второй канавки 74 для обеспечения скользящего контакта. Таким образом, в данном состоянии спиральная часть 58А второй цилиндрической винтовой пружины 58 расширяется без возникновения упругой деформации элемента 70В для обеспечения скользящего контакта, так что упругими силами, которые стремятся вернуть рычаг 52 педали в исходное положение, являются упругая сила, создаваемая первой цилиндрической винтовой пружиной 56, и упругая сила, создаваемая второй цилиндрической винтовой пружиной 58. Соответственно, в шестом варианте осуществления зависимость между усилием F нажима, приложенным к рычагу 52 педали водителем во время увеличения усилия F нажима от 0, и ходом S центра поверхности нажима, образованной на плоской пластинчатой части 52А, также аналогична соответствующей зависимости в вышеописанном первом варианте осуществления, то есть характеристика F-S представляет собой характеристику с двумя перегибами, подобную показанной на фиг.6.
В шестом варианте осуществления по мере увеличения хода S рычага 52 педали силы, с которыми элементы 70 для обеспечения скользящего контакта прижимают соответственно первую цилиндрическую винтовую пружину 56 и вторую цилиндрическую винтовую пружину 58, постепенно увеличиваются, так что силы трения между элементами 70А и 70В для обеспечения скользящего контакта и первой и второй цилиндрическими винтовыми пружинами 56 и 58 постепенно увеличиваются. Таким образом, характеристическая кривая F-S в процессе увеличения и уменьшения усилия нажима, приложенного к рычагу 52 педали, повторяет кривую гистерезиса, как показано на фиг.17. Следовательно, шестой вариант осуществления также может обеспечить действия и эффекты, аналогичные действиям и эффектам, обеспечиваемым вышеописанными первым - пятым вариантами осуществления. Кроме того, ширина петли гистерезиса для характеристической кривой F-S может быть увеличена вместе с увеличением хода S рычага 52 педали.
В шестом варианте осуществления основными силами, которые «стремятся» возвратить рычаг 52 педали в исходное положение, являются: на втором линейном участке L2 по фиг.6 - упругая сила, создаваемая первой цилиндрической винтовой пружиной 56, упругая сила, создаваемая второй цилиндрической винтовой пружиной 58, и упругая сила, создаваемая элементом 70В для обеспечения скользящего контакта, и на третьем линейном участке L3 по фиг.6 - упругая сила, создаваемая первой цилиндрической винтовой пружиной 56, и упругая сила, создаваемая второй цилиндрической винтовой пружиной 58. Следовательно, первая цилиндрическая винтовая пружина 56 и вторая цилиндрическая винтовая пружина 58 могут иметь одинаковую жесткость пружин или разные значения жесткости пружин.
В шестом варианте осуществления первый элемент 70А для обеспечения скользящего контакта и второй элемент 70В для обеспечения скользящего контакта, выполненные из разных материалов, предусмотрены в качестве средств для создания сил сопротивления, находящихся в скользящем контакте соответственно с первой цилиндрической винтовой пружиной 56 и второй цилиндрической винтовой пружиной 58. Однако данная конфигурация может быть следующей: когда первый элемент 70А для обеспечения скользящего контакта и второй элемент 70В для обеспечения скользящего контакта выполнены из одного и того же материала или образованы за одно целое друг с другом, модуль K2 упругости элемента для обеспечения скользящего контакта, измеренный вблизи второй канавки 74 для обеспечения скользящего контакта, будет установлен меньшим, чем модуль K1 упругости элемента для обеспечения скользящего контакта, измеренный вблизи первой канавки 72 для обеспечения скользящего контакта, посредством неровностей, таких как прорези.
Седьмой вариант осуществления изобретения
Фиг.24 представляет собой вид сбоку, показывающий седьмой вариант осуществления исполнительного устройства с педальным управлением в соответствии с настоящим изобретением, при этом устройство выполнено в виде педального устройства акселератора автомобиля типа устройства с электрическим управлением системой привода. Фиг.25 представляет собой вид сзади, показывающий седьмой вариант осуществления. На фиг.24 и 25 элементы, аналогичные элементам, имеющимся на фиг.18-20, обозначены аналогичными ссылочными позициями, используемыми на фиг.18-20, и эти условные обозначения применены для других вариантов осуществления, которые будут описаны позже.
В седьмом варианте осуществления рычаг 52 педали и опорный кронштейн 54 выполнены с конфигурацией, аналогичной конфигурации соответствующих элементов в вышеописанном шестом варианте осуществления. Однако опоры 54В опорного кронштейна 54 расположены с соответствующих ближних сторон по отношению к поворотным частям 52С рычага 52 педали. Для поверхности каждой поворотной части 52С и поверхности каждой опоры 54В, которые обращены друг к другу, обеспечен низкий коэффициент трения посредством подвергания их обработке поверхности, такой как покрытие тефлоном (зарегистрированный товарный знак).
Неподвижный кулачковый элемент 76 расположен между парными опорами 54В и прикреплен на его противоположных концах к соответствующим опорам 54В. Таким образом, осевой стержень 62 по данному варианту осуществления проходит вдоль оси 64 через парные поворотные части 52С, парные опоры 54В и неподвижный кулачковый элемент 76. Неподвижный кулачковый элемент 76 имеет форму поперечного сечения, состоящую из полуэллипса и прямоугольника, который проходит от полуэллипса и расположен таким образом, что большая ось полуэллипса поперечного сечения проходит горизонтально.
Две криволинейные канавки 78 и 80 образованы на поверхности неподвижного кулачкового элемента 76 за исключением верхней поверхности и торцевых поверхностей части, имеющей прямоугольное поперечное сечение, таким образом, что они разнесены друг от друга в направлении вдоль оси 64. Каждая из криволинейных канавок 78 и 80 имеет полукруглую или U-образную форму в сечении и проходит вокруг оси 64. Проволоки 82 и 84 петлеобразно охватывают соответствующие криволинейные канавки 78 и 80 и установлены в соответствующих криволинейных канавках 78 и 80. Стопорные кольца 86 и 88 прикреплены к одним концам соответствующих проволок 82 и 84. Проволоки 82 и 84 выполнены из материала, который является гибким, но ни растягивается, ни стягивается. Одни концы проволок 82 и 84 прикреплены к неподвижному кулачковому элементу 76 посредством ограничителя 90, который прикреплен к нижней поверхности части неподвижного кулачкового элемента 76, имеющей прямоугольное поперечное сечение, непроиллюстрированными винтами.
Первая цилиндрическая винтовая пружина 92 растяжения, которая служит в качестве первого возвратного поджимающего средства, и вторая цилиндрическая винтовая пружина 94 растяжения, которая служит в качестве второго возвратного поджимающего средства, присоединены к промежуточным участкам соответствующих проволок 82 и 84. Цилиндрические винтовые пружины 92 и 94 растяжения проходят параллельно друг другу вдоль продольного направления рычага 52 педали. Другие концы проволок 82 и 84 прикреплены к задней поверхности плоской пластинчатой части 52А рычага 52 педали посредством соответствующих крепежных элементов 96 и 98.
Элемент 100 для обеспечения скользящего контакта, который служит в качестве средства для создания первой и второй сил сопротивления, прикреплен к части 52В, представляющей собой периферийную стенку, с задней стороны плоской пластинчатой части 52А рычага 52 педали. Элемент 100 для обеспечения скользящего контакта имеет полуцилиндрическую форму. Первая канавка 102 для обеспечения скользящего контакта и вторая канавка 104 для обеспечения скользящего контакта выполнены на поверхности выступа элемента 100 для обеспечения скользящего контакта, которая обращена к плоской пластинчатой части 52А таким образом, что они проходят вдоль продольного направления рычага 52 педали и разнесены друг от друга. Каждая из канавок 102 и 104 для обеспечения скользящего контакта имеет полукруглое или U-образное поперечное сечение, и в них входят соответственно первая цилиндрическая винтовая пружина 92 растяжения и вторая цилиндрическая винтовая пружина 94 растяжения таким образом, что цилиндрические винтовые пружины 92 и 94 растяжения могут перемещаться возвратно-поступательно.
Поверхности стенок канавки 104 для обеспечения скользящего контакта, выполненной на элементе 100 для обеспечения скользящего контакта, имеют неровности, такие как множество прорезей, образованных на них и проходящих вдоль направления протяженности канавки. В отношении упругой деформации в направлении расширения-сужения цилиндрических винтовых пружин 92 и 94 растяжения следует отметить, что за счет данного конструктивного признака модуль K2 упругости части элемента 100 для обеспечения скользящего контакта, находящейся вблизи поверхностей стенок канавки 104 для обеспечения скользящего контакта, устанавливается меньшим, чем модуль K1 упругости части элемента 100 для обеспечения скользящего контакта, находящейся вблизи поверхностей стенок канавки 102 для обеспечения скользящего контакта.
Первая и вторая канавки 102 и 104 для обеспечения скользящего контакта имеют достаточную длину для приема первой цилиндрической винтовой пружины 92 растяжения и второй цилиндрической винтовой пружины 94 растяжения в состоянии контакта на всей их длине даже тогда, когда первая и вторая цилиндрические винтовые пружины 92 и 94 растяжения растягиваются и сжимаются при повороте рычага 52 педали относительно опорного кронштейна 54.
Осевой стержень 62 проходит вдоль оси 64 через парные поворотные части 52С, парные опоры 54В и неподвижный кулачковый элемент 76. За счет данного конструктивного признака рычаг 52 педали опирается на опорный кронштейн 54 таким образом, чтобы обеспечивалась возможность его поворота вокруг оси 64. Однако в данном варианте осуществления осевой стержень 62 расположен в том месте, которое смещено от центра полуэллиптической части неподвижного кулачкового элемента 76 к прямоугольной части неподвижного кулачкового элемента 76.
Таким образом, как видно на фиг.24, когда Р1 и Р2 представляют собой соответственно точку контакта между поверхностью криволинейной канавки 78 и проволокой 82 и точку контакта между поверхностью криволинейной канавки 80 и проволокой 84, по мере увеличения хода рычага 52 педали из исходного положения расстояние от точек Р1 и Р2 контакта до оси 64 постепенно уменьшается. Соответственно, по мере увеличения хода рычага 52 педали силы, с которыми проволоки 82 и 84 давят на поверхности соответствующих первой и второй канавок 102 и 104 для обеспечения скольжения, постепенно увеличиваются, так что силы трения между проволоками 82 и 84 и поверхностями соответствующих первой и второй канавок 102 и 104 для обеспечения скользящего контакта постепенно увеличиваются.
Кроме того, в данном варианте осуществления рычаг 52 педали, неподвижный кулачковый элемент 76 и элемент 100 для обеспечения скользящего контакта также могут быть выполнены или из смолы, или из металла. Тем не менее, предпочтительно, по меньшей мере, элемент 100 для обеспечения скользящего контакта образован из смолы. Для поверхностей первой и второй канавок 102 и 104 для обеспечения скользящего контакта, выполненных в элементе 100 для обеспечения скользящего контакта, обеспечен низкий коэффициент трения за счет выполнения обработки поверхности, такой как покрытие тефлоном (зарегистрированный товарный знак). В частности, коэффициент статического трения поверхности первой канавки 102, предназначенной для обеспечения скользящего контакта, относительно проволоки 82 (первый коэффициент µs1 статического трения) задан меньшим, чем коэффициент статического трения поверхности второй канавки 104, предназначенной для обеспечения скользящего контакта, относительно проволоки 84 (второй коэффициент µs2 статического трения).
Прижимающая сила, с которой первая цилиндрическая винтовая пружина 92 растяжения давит на поверхность первой канавки 102 для обеспечения скользящего контакта, и прижимающая сила, с которой вторая цилиндрическая винтовая пружина 94 растяжения давит на поверхность второй канавки 104 для обеспечения скользящего контакта, по существу эквивалентны друг другу. Соответственно, максимальная сила статического трения между второй цилиндрической винтовой пружиной 94 растяжения и поверхностью второй канавки 104 для обеспечения скользящего контакта превышает максимальную силу статического трения между первой цилиндрической винтовой пружиной 92 растяжения и поверхностью первой канавки 102 для обеспечения скользящего контакта.
Следует отметить, что для значительного снижения коэффициента трения между поверхностями криволинейных канавок 78 и 80 и проволоками 82 и 84 смазочный материал, такой как консистентная смазка, наносят на поверхности криволинейных канавок 78 и 80. Хотя это не проиллюстрировано, крепежные элементы 96 и 98 могут быть снабжены соответствующими регулировочными приспособлениями для регулировки упругих сил, создаваемых цилиндрическими винтовыми пружинами 92 и 94 растяжения, когда рычаг 52 педали установлен в исходном положении.
Таким образом, поверхность первой канавки 102 для обеспечения скользящего контакта, выполненной в элементе 100 для обеспечения скользящего контакта, и поверхность первой цилиндрической винтовой пружины 92 растяжения, которые введены во фрикционное взаимодействие друг с другом, образуют первую пару поверхностей трения, предназначенную для создания первой силы сопротивления посредством силы трения. Поверхность второй канавки 104 для обеспечения скользящего контакта, выполненной в элементе 100 для обеспечения скользящего контакта, и поверхность второй цилиндрической винтовой пружины 94 растяжения, которые введены во фрикционное взаимодействие друг с другом, образуют вторую пару поверхностей трения, предназначенную для создания второй силы сопротивления посредством силы трения. Часть элемента 100 для обеспечения скользящего контакта, которая является периферийной по отношению ко второй канавке 104 для обеспечения скользящего контакта, также служит в качестве элемента для обеспечения смещения, который за счет его упругой деформации обеспечивает возможность перемещения второй пары поверхностей трения, имеющей больший коэффициент статического трения, вместе с относительным смещением рычага 52 педали относительно опорного кронштейна 54.
Другие конструктивные признаки седьмого варианта осуществления аналогичны конструктивным признакам вышеописанного шестого варианта осуществления. Соответственно, несмотря на то, что первая цилиндрическая винтовая пружина 92 растяжения и вторая цилиндрическая винтовая пружина 94 растяжения установлены между рычагом 52 педали и опорным кронштейном 54 через посредство соответствующих проволок 82 и 84, седьмой вариант осуществления функционирует аналогично вышеописанному шестому варианту осуществления. Следовательно, седьмой вариант осуществления может обеспечить действия и эффекты, аналогичные действиям и эффектам вышеописанного шестого варианта осуществления.
В частности, в соответствии с седьмым вариантом осуществления, по мере увеличения хода рычага 52 педали силы, с которыми проволоки 82 и 84 давят на поверхности соответственно первой и второй канавок 102 и 104 для обеспечения скольжения, постепенно увеличиваются, однако при увеличении хода скорость увеличения прижимающих сил постепенно уменьшается. Таким образом, характеристическая кривая F-S в седьмом варианте осуществления повторяет кривую гистерезиса, показанную сплошной линией на фиг.26.
Между тем посредством выбора соответствующей формы неподвижного кулачкового элемента 76 может быть обеспечен следующий функциональный признак: по мере увеличения хода рычага 52 педали скорость увеличения сил, с которыми проволоки 82 и 84 давят на поверхности соответственно первой и второй канавок 102 и 104 для обеспечения скольжения, будет постепенно увеличиваться. В данном случае характеристическая кривая F-S повторяет кривую гистерезиса, показанную пунктирной линией на фиг.26.
Седьмой вариант осуществления, описанный выше, предусмотрен только с одним элементом 100 для обеспечения скользящего контакта, который служит в качестве средства для создания первой и второй сил сопротивления, находящегося в скользящем контакте с соответствующими цилиндрическими винтовыми пружинами 92 и 94 растяжения. Тем не менее, аналогично первому элементу 70А для обеспечения скользящего контакта и второму элементу 70В для обеспечения скользящего контакта в вышеописанном шестом варианте осуществления первый элемент для обеспечения скользящего контакта и второй элемент для обеспечения скользящего контакта, образованные из разных материалов, могут быть предусмотрены в качестве средств для создания первой и второй сил сопротивления, находящихся в скользящем контакте с соответствующими цилиндрическими винтовыми пружинами 92 и 94 растяжения.
Восьмой вариант осуществления изобретения
Фиг.27 представляет собой вид сбоку, показывающий восьмой вариант осуществления исполнительного устройства с педальным управлением в соответствии с настоящим изобретением, при этом устройство выполнено в виде педального устройства акселератора автомобиля типа устройства с электрическим управлением системой привода. Фиг.28 представляет собой увеличенный частичный вид сзади, показывающий восьмой вариант осуществления.
В восьмом варианте осуществления первая цилиндрическая винтовая пружина 106, которая служит в качестве первого возвратного поджимающего средства, и вторая цилиндрическая винтовая пружина 108, которая служит в качестве второго возвратного поджимающего средства, расположены вокруг осевого стержня 62. Цилиндрические винтовые пружины 106 и 108 представляют собой цилиндрические винтовые пружины кручения, выровнены относительно оси 64 и проходят концентрически относительно друг друга. Цилиндрическая винтовая пружина 106 расположена снаружи цилиндрической винтовой пружины 108 и отделена от цилиндрической винтовой пружины 108 в радиальном направлении.
Элемент 110 для обеспечения скользящего контакта, который образован из смолы и служит в качестве средства для создания первой силы сопротивления, закреплен на верхней поверхности базовой части 54А опорного кронштейна 54. Как показано на фиг.29 и 30, элемент 110 для обеспечения скользящего контакта имеет канавку 112 для обеспечения скользящего контакта, образованную на верхней поверхности элемента 110 для обеспечения скользящего контакта и имеющую дугообразное поперечное сечение. Одни концы цилиндрических винтовых пружин 106 и 108 прикреплены к элементу 110 для обеспечения скользящего контакта или к базовой части 54А опорного кронштейна 54, а другие концы прикреплены к задней поверхности плоской пластинчатой части 52А рычага 52 педали посредством крепежного (фиксирующего) элемента 114. Цилиндрическая гильза 116, которая выполнена из смолы и служит в качестве средства для создания второй силы сопротивления, установлена неподвижно на осевом стержне 62. Гильза 116 проходит между парными поворотными частями 52С и вокруг осевого стержня 62.
Цилиндрические винтовые пружины 106 и 108 находятся в контакте соответственно с поверхностью канавки 112 для обеспечения скользящего контакта и с гильзой 116 по существу на всей длине между одним концом и другим концом спиральной части каждой из цилиндрических винтовых пружин 106 и 108 и слегка поджимают соответственно поверхность канавки 112 для обеспечения скользящего контакта и гильзу 116 в радиальном направлении наружу и в радиальном направлении внутрь. Цилиндрическая винтовая пружина 106 расположена таким образом, что по мере увеличения угла поворота рычага 52 педали из исходного положения цилиндрическая винтовая пружина 106 упруго деформируется в направлении разматывания спирали, что вызывает постепенное увеличение ее диаметра. Напротив, цилиндрическая винтовая пружина 108 расположена таким образом, что по мере увеличения угла поворота рычага 52 педали из исходного положения, цилиндрическая винтовая пружина 108 упруго деформируется в направлении наматывания спирали, что вызывает постепенное уменьшение ее диаметра.
Соответственно, по мере увеличения угла поворота рычага 52 педали из исходного положения силы, с которыми цилиндрические винтовые пружины 106 и 108 поджимают соответственно поверхность канавки 112 для обеспечения скользящего контакта и гильзу 116, постепенно увеличиваются, так что силы трения между цилиндрическими винтовыми пружинами 106 и 108 и поверхностью канавки 112 для обеспечения скользящего контакта и гильзой 116 постепенно увеличиваются. Прямолинейные части цилиндрических винтовых пружин 106 и 108 между фиксирующим элементом 114 и спиральными частями цилиндрических винтовых пружин 106 и 108 могут быть усилены с тем, чтобы не происходило их чрезмерного сгибания.
Кроме того, в данном варианте осуществления модуль K1 упругости смолы, используемой для образования элемента 110 для обеспечения скользящего контакта, является сравнительно большим, и модуль K2 упругости смолы, используемой для образования гильзы 116, задан меньшим, чем модуль K1 упругости смолы, используемой для образования элемента 110 для обеспечения скользящего контакта. Гильза 116 расположена ближе к оси 64, чем элемент 110 для обеспечения скользящего контакта; таким образом, величина упругой деформации гильзы 116 в направлении вдоль окружности может быть меньше, чем величина упругой деформации элемента 110, предназначенного для обеспечения скользящего контакта, в направлении вдоль окружности. Следовательно, разность модуля K1 упругости смолы, используемой для образования элемента 110 для обеспечения скользящего контакта, и модуля K2 упругости смолы, используемой для образования гильзы 116, может быть меньше разности модулей упругости элементов 70А и 70В для обеспечения скользящего контакта в вышеописанном шестом варианте осуществления.
Для поверхности канавки 112 для обеспечения скользящего контакта и наружной поверхности гильзы 116 обеспечен низкий коэффициент трения за счет выполнения обработки поверхности, такой как покрытие тефлоном (зарегистрированный товарный знак). В частности, коэффициент статического трения поверхности канавки 112, предназначенной для обеспечения скользящего контакта, относительно цилиндрической винтовой пружины 106 (первый коэффициент µs1 статического трения) задан меньшим, чем коэффициент статического трения наружной поверхности гильзы 116 относительно цилиндрической винтовой пружины 108 (второй коэффициент µs2 статического трения).
Прижимающая сила, с которой первая цилиндрическая винтовая пружина 106 давит на поверхность канавки 112 для обеспечения скользящего контакта, и прижимающая сила, с которой вторая цилиндрическая винтовая пружина 108 давит на наружную поверхность гильзы 116, по существу эквивалентны друг другу. Соответственно, максимальная сила статического трения между второй цилиндрической винтовой пружиной 108 и наружной поверхностью гильзы 116 превышает максимальную силу статического трения между первой цилиндрической винтовой пружиной 106 и поверхностью канавки 112 для обеспечения скользящего контакта.
Таким образом, поверхность канавки 112 для обеспечения скользящего контакта, выполненной в элементе 110 для обеспечения скользящего контакта, и поверхность первой цилиндрической винтовой пружины 106, которые введены во фрикционное взаимодействие друг с другом, образуют первую пару поверхностей трения, предназначенную для создания первой силы сопротивления посредством силы трения. Наружная поверхность гильзы 116 и поверхность второй цилиндрической винтовой пружины 108, которые введены во фрикционное взаимодействие друг с другом, образуют вторую пару поверхностей трения, предназначенную для создания второй силы сопротивления посредством силы трения. Гильза 116 также служит в качестве элемента для обеспечения смещения, который за счет его упругой деформации обеспечивает возможность перемещения второй пары поверхностей трения, имеющей больший коэффициент статического трения, вместе с относительным смещением рычага 52 педали относительно опорного кронштейна 54.
Другие конструктивные признаки восьмого варианта осуществления аналогичны конструктивным признакам вышеописанных шестого и седьмого вариантов осуществления. Соответственно, восьмой вариант осуществления функционирует аналогично вышеописанным шестому и седьмому вариантам осуществления за исключением того, что направление скольжения первой цилиндрической винтовой пружины 106 относительно канавки 112 для обеспечения скользящего контакта и направление скольжения второй цилиндрической винтовой пружины 108 относительно наружной поверхности гильзы 116 представляют собой направление вдоль окружности вокруг оси 64 и что направление упругой деформации первой цилиндрической винтовой пружины 106 в канавке 112 для обеспечения скользящего контакта и направление упругой деформации второй цилиндрической винтовой поверхности 108 на наружной поверхности гильзы 116 представляют собой направление вдоль окружности вокруг оси 64. Следовательно, восьмой вариант осуществления может обеспечить действия и эффекты, аналогичные действиям и эффектам вышеописанного шестого варианта осуществления.
Девятый вариант осуществления изобретения
Фиг.31 представляет собой вид сбоку, показывающий девятый вариант осуществления исполнительного устройства с педальным управлением в соответствии с настоящим изобретением, при этом устройство выполнено в виде педального устройства акселератора автомобиля типа устройства с электрическим управлением системой привода. Фиг.32 представляет собой увеличенный частичный вид сзади, показывающий девятый вариант осуществления.
В девятом варианте осуществления предусмотрена цилиндрическая гильза 116 из смолы, однако элемент 110 для обеспечения скользящего контакта, имеющийся в восьмом варианте осуществления, не предусмотрен. Гильза 116 окружает осевой стержень 62, при этом она установлена на нем с большим зазором и прикреплена на ее противоположных концах к представляющей собой периферийную стенку части 52В рычага 52 педали. Первая цилиндрическая винтовая пружина 106, которая служит в качестве первого возвратного поджимающего средства, расположена с наружной стороны гильзы 116. Вторая цилиндрическая винтовая пружина 108, которая служит в качестве второго возвратного поджимающего средства, расположена между гильзой 116 и осевым стержнем 62. Одни концы цилиндрических винтовых пружин 106 и 108 прикреплены к верхней поверхности базовой части 54А опорного кронштейна 54 посредством фиксирующего элемента 118, а другие концы прикреплены к задней поверхности плоской пластинчатой части 52А рычага 52 педали посредством фиксирующего (крепежного) элемента 114.
Прямолинейные части цилиндрических винтовых пружин 106 и 108 между фиксирующим элементом 114 и спиральными частями цилиндрических винтовых пружин 106 и 108 могут быть усилены с тем, чтобы не происходило их чрезмерного сгибания. Хотя это не проиллюстрировано, прямолинейные части цилиндрической винтовой пружины 108 проходят через вырезы, выполненные на концевых частях гильзы 116.
Цилиндрические винтовые пружины 106 и 108 находятся в контакте соответственно с наружной поверхностью и внутренней поверхностью гильзы 116 по существу на всей длине между одним концом и другим концом спиральной части каждой из цилиндрических винтовых пружин 106 и 108 и незначительно поджимают гильзу 116 соответственно в радиальном направлении внутрь и наружу. Таким образом, гильза 116 служит со стороны ее наружной поверхности в качестве первой части, предназначенной для обеспечения трения скольжения, предусмотренной в средстве для создания первой силы сопротивления, и в качестве первой части, предназначенной для обеспечения упругой деформации, и служит со стороны ее внутренней поверхности в качестве второй части, предназначенной для обеспечения трения скольжения, предусмотренной в средстве для создания второй силы сопротивления, и в качестве второй части, предназначенной для обеспечения упругой деформации.
Цилиндрическая винтовая пружина 106 расположена таким образом, что по мере увеличения угла поворота рычага 52 педали из исходного положения цилиндрическая винтовая пружина 106 упруго деформируется в направлении наматывания спирали, что вызывает постепенное увеличение ее диаметра. Напротив, цилиндрическая винтовая пружина 108 расположена таким образом, что по мере увеличения угла поворота рычага 52 педали из исходного положения цилиндрическая винтовая пружина 108 упруго деформируется в направлении разматывания спирали, что вызывает постепенное увеличение ее диаметра. Соответственно, по мере увеличения угла поворота рычага 52 педали из исходного положения силы, с которыми цилиндрические винтовые пружины 106 и 108 давят на гильзу 116 в радиальном направлении, постепенно увеличиваются, так что силы трения между гильзой 116 и цилиндрическими винтовыми пружинами 106 и 108 постепенно увеличиваются.
В данном варианте осуществления модуль упругости смолы, используемой для образования гильзы 116, является сравнительно большим, и модуль K2 упругости гильзы 116 на стороне внутренней поверхности задан меньшим, чем модуль K1 упругости гильзы 116 на стороне наружной поверхности, посредством выполнения множества прорезей, проходящих в направлении вдоль окружности, или тому подобного на внутренней поверхности гильзы 116. Внутренняя поверхность гильзы 116 расположена ближе к оси 64, чем наружная поверхность гильзы 116; таким образом, величина упругой деформации внутренней поверхности гильзы 116 в направлении вдоль окружности может быть меньше, чем величина упругой деформации наружной поверхности гильзы 116 в направлении вдоль окружности. Следовательно, разность модуля K1 упругости гильзы 116 на стороне наружной поверхности и модуля K2 упругости гильзы 116 на стороне внутренней поверхности может быть меньше разности модулей упругости элементов 70А и 70В для обеспечения скользящего контакта в вышеописанном шестом варианте осуществления.
Для наружной и внутренней поверхностей гильзы 116 обеспечен низкий коэффициент трения за счет выполнения обработки поверхности, такой как покрытие тефлоном (зарегистрированный товарный знак). В частности, коэффициент статического трения наружной поверхности гильзы 116 относительно цилиндрической винтовой пружины 106 (первый коэффициент µs1 статического трения) задан меньшим, чем коэффициент статического трения внутренней поверхности гильзы 116 относительно цилиндрической винтовой пружины 108 (второй коэффициент µs2 статического трения).
Прижимающая сила, с которой первая цилиндрическая винтовая пружина 106 давит на наружную поверхность гильзы 116, и прижимающая сила, с которой вторая цилиндрическая винтовая пружина 108 давит на внутреннюю поверхность гильзы 116, по существу эквивалентны друг другу. Соответственно, максимальная сила статического трения между второй цилиндрической винтовой пружиной 108 и внутренней поверхностью гильзы 116 превышает максимальную силу статического трения между первой цилиндрической винтовой пружиной 106 и наружной поверхностью гильзы 116.
Таким образом, наружная поверхность гильзы 116 и поверхность первой цилиндрической винтовой пружины 106, которые введены во фрикционное взаимодействие друг с другом, образуют первую пару поверхностей трения, предназначенную для создания первой силы сопротивления посредством силы трения. Внутренняя поверхность гильзы 116 и поверхность второй цилиндрической винтовой пружины 108, которые введены во фрикционное взаимодействие друг с другом, образуют вторую пару поверхностей трения, предназначенную для создания второй силы сопротивления посредством силы трения. Гильза 116 также служит в качестве элемента для обеспечения смещения, который за счет его упругой деформации обеспечивает возможность перемещения второй пары поверхностей трения, имеющей больший коэффициент статического трения, вместе с относительным смещением рычага 52 педали относительно опорного кронштейна 54.
Другие конструктивные признаки девятого варианта осуществления аналогичны конструктивным признакам вышеописанного шестого - восьмого вариантов осуществления. Соответственно, девятый вариант осуществления функционирует аналогично вышеописанному восьмому варианту осуществления за исключением того, что по мере увеличения угла поворота рычага 52 педали из исходного положения диаметр цилиндрической винтовой пружины 106 уменьшается, а диаметр цилиндрической винтовой пружины 108 увеличивается. Следовательно, девятый вариант осуществления может обеспечить действия и эффекты, аналогичные действиям и эффектам вышеописанного восьмого варианта осуществления.
Десятый вариант осуществления изобретения
Фиг.33 представляет собой вид сбоку, показывающий десятый вариант осуществления исполнительного устройства с педальным управлением в соответствии с настоящим изобретением, при этом устройство выполнено в виде педального устройства акселератора автомобиля типа устройства с электрическим управлением системой привода. Фиг.34 представляет собой вид сзади, показывающий десятый вариант осуществления.
В десятом варианте осуществления первая пластинчатая пружина 118, которая служит в качестве первого возвратного поджимающего средства, и вторая пластинчатая пружина 120, которая служит в качестве второго возвратного поджимающего средства, расположены с задней стороны плоской пластинчатой части 52А рычага 52 педали. Пластинчатые пружины 118 и 120 расположены на небольшом расстоянии друг от друга вдоль направления ширины плоской пластинчатой части 52А рычага 52 педали. Шарнирные части пластинчатых пружин 118 и 120, расположенные на их нижних концах, окружают осевой стержень 62, в результате чего пластинчатые пружины 118 и 120 будут опираться на осевой стержень 62 с возможностью поворота. Пластинчатые пружины 118 и 120 изогнуты в их центральных частях в направлении от плоской пластинчатой части 52А, и наружные поверхности их центральных частей находятся в контакте с наклонной частью кузова В транспортного средства.
Ширина первой пластинчатой пружины 118 превышает ширину второй пластинчатой пружины 120. Жесткость первой пластинчатой пружины 118 задана по существу равной жесткости второй пластинчатой пружины 120 или меньшей, чем жесткость второй пластинчатой пружины. Дистальные концевые части пластинчатых пружин 118 и 120 также слегка изогнуты в направлении от плоской пластинчатой части 52А рычага 52 педали. Ширина пластинчатых пружин 118 и 120 постоянна на всей их длине. Тем не менее, ширина дистальных концевых частей пластинчатых пружин 118 и 120 может быть задана меньшей, чем у остальных частей.
Первая пластина 122 для обеспечения скользящего контакта, которая образована из смолы и служит в качестве средства для создания первой силы сопротивления, и вторая пластина 124 для обеспечения скользящего контакта, которая образована из смолы и служит в качестве средства для создания второй силы сопротивления, закреплены на задней поверхности плоской пластинчатой части 52А рычага 52 педали. Дистальные концевые части пластинчатых пружин 118 и 120 находятся в контакте соответственно с первой пластиной 122 для обеспечения скользящего контакта и второй пластиной 124 для обеспечения скользящего контакта и немного поджимают соответствующие пластины, предназначенные для обеспечения скользящего контакта, к плоской пластинчатой части 52А.
При нажатии на рычаг 52 педали, чтобы тем самым повернуть его относительно опорного кронштейна 54, пластинчатые пружины 118 и 120 обеспечивают увеличение соответствующих возвращающих поджимающих сил, приложенных к рычагу 52 педали, в результате чего увеличиваются соответствующие прижимающие силы, действующие на пластины 122 и 124 для обеспечения скользящего контакта. Кроме того, пластинчатые пружины 118 и 120 обеспечивают приложение подобных сил, чтобы вызвать упругие деформации сдвига соответствующих пластин 122 и 124, предназначенных для обеспечения скользящего контакта, вдоль плоской пластинчатой части 52А в направлении от осевого стержня 62.
Принимая во внимание направление деформации сдвига пластин 122 и 124 для обеспечения скользящего контакта, модуль K1 упругости смолы, используемой для образования пластины 122 для обеспечения скользящего контакта, устанавливают сравнительно высоким, а модуль K2 упругости смолы, используемой для образования пластины 124 для обеспечения скользящего контакта, задают меньшим, чем модуль K1 упругости смолы, используемой для образования пластины 122 для обеспечения скользящего контакта. Данные модули упругости могут быть обеспечены посредством использования разных смол для образования пластин 122 и 124 для обеспечения скользящего контакта или посредством образования неровностей, таких как множество прорезей, проходящих в продольном направлении рычага 52 педали.
Для поверхностей пластин 122 и 124 для обеспечения скользящего контакта обеспечен низкий коэффициент трения за счет выполнения обработки поверхности, такой как покрытие тефлоном (зарегистрированный товарный знак). В частности, коэффициент статического трения наружной поверхности первой пластины 122, предназначенной для обеспечения скользящего контакта, относительно первой пластинчатой пружины 118 (первый коэффициент µs1 статического трения) задан меньшим, чем коэффициент статического трения внутренней поверхности второй пластины 124, предназначенной для обеспечения скользящего контакта, относительно второй пластинчатой пружины 120 (второй коэффициент µs2 статического трения).
Поскольку первая пластинчатая пружина 118 и вторая пластинчатая пружина 120 выполнены и установлены так, как упомянуто выше, прижимающая сила, с которой вторая пластинчатая пружина 120 прижимает вторую пластину 124 для обеспечения скользящего контакта, по существу такая же, как прижимающая сила, с которой первая пластинчатая пружина 118 прижимает первую пластину 122 для обеспечения скользящего контакта, или больше прижимающей силы, с которой первая пластинчатая пружина 118 прижимает первую пластину 122 для обеспечения скользящего контакта. Соответственно, максимальная сила статического трения между второй пластинчатой пружиной 120 и второй пластиной 124 для обеспечения скользящего контакта превышает максимальную силу статического трения между первой пластинчатой пружиной 118 и первой пластиной 122 для обеспечения скользящего контакта.
Таким образом, поверхность первой пластинчатой пружины 118 и поверхность первой пластины 122 для обеспечения скользящего контакта, которые введены во фрикционное взаимодействие друг с другом, образуют первую пару поверхностей трения, предназначенную для создания первой силы сопротивления посредством силы трения. Поверхность второй пластинчатой пружины 120 и поверхность второй пластины 124 для обеспечения скользящего контакта, которые введены во фрикционное взаимодействие друг с другом, образуют вторую пару поверхностей трения, предназначенную для создания второй силы сопротивления посредством силы трения. Вторая пластина 124 для обеспечения скользящего контакта также служит в качестве элемента для обеспечения смещения, который за счет его упругой деформации обеспечивает возможность перемещения второй пары поверхностей трения, имеющей больший коэффициент статического трения, вместе с относительным смещением рычага 52 педали относительно опорного кронштейна 54.
Упругие силы, создаваемые первой пластинчатой пружиной 118 и второй пластинчатой пружиной 120, поджимают рычаг 52 педали в направлении против часовой стрелки относительно осевого стержня 62, если смотреть на фиг.33. Соответственно, когда усилие нажима не приложено к рычагу 52 педали, рычаг 52 педали будет расположен в его исходном положении, при котором ограничители 68, предусмотренные на нижнем конце части 52В, представляющей собой периферийную стенку, находятся в контакте с периферийными частями соответствующих опор 54В опорного кронштейна 54.
По мере увеличения угла поворота рычага 52 педали из исходного положения в результате нажатия на рычаг 52 педали упругие силы, создаваемые первой пластинчатой пружиной 118 и второй пластинчатой пружиной 120, постепенно увеличиваются. Соответственно, по мере увеличения угла поворота рычага 52 педали из исходного положения силы, с которыми первая пластинчатая пружина 118 и вторая пластинчатая пружина 120 прижимают соответственно первую пластину 122 для обеспечения скользящего контакта и вторую пластину 124, предназначенную для обеспечения скользящего контакта, в перпендикулярном направлении, постепенно увеличиваются; таким образом, сила трения между первой пластинчатой пружиной 118 и первой пластиной 122 для обеспечения скользящего контакта и сила трения между второй пластинчатой пружиной 120 и второй пластиной 124 для обеспечения скользящего контакта постепенно увеличиваются. Кроме того, по мере увеличения угла поворота рычага 52 педали из исходного положения силы, посредством которых первая пластинчатая пружина 118 и вторая пластинчатая пружина 120 обеспечивают деформации сдвига соответственно первой пластины 122 для обеспечения скользящего контакта и второй пластины 124 для обеспечения скользящего контакта, постепенно увеличиваются.
Когда сила, действующая соответственно между первой пластинчатой пружиной 118 и первой пластиной 122, предназначенной для обеспечения скользящего контакта, вдоль их поверхностей, равна максимальной силе статического трения между ними или меньше нее, сила трения между второй пластинчатой пружиной 120 и второй пластиной 124 для обеспечения скользящего контакта также равна максимальной силе статического трения между ними или меньше нее. Кроме того, величины деформаций сдвига соответственно первой пластины 122 для обеспечения скользящего контакта и второй пластины 124 для обеспечения скользящего контакта являются умеренными. Следовательно, рычаг 52 педали по существу не поворачивается, как показано на фиг.33.
Когда сила, действующая соответственно между первой пластинчатой пружиной 118 и первой пластиной 122, предназначенной для обеспечения скользящего контакта, вдоль их поверхностей, превысит максимальную силу статического трения между ними, дистальная концевая часть первой пластинчатой пружины 118 смещается относительно первой пластины 122, предназначенной для обеспечения скользящего контакта, вдоль плоской пластинчатой части 52А в направлении от осевого стержня 62. Когда сила, действующая соответственно между второй пластинчатой пружиной 120 и второй пластиной 124, предназначенной для обеспечения скользящего контакта, вдоль их поверхностей, равна максимальной силе статического трения между ними или меньше нее, вторая пластинчатая пружина 120 вызывает деформацию сдвига второй пластины 124 для обеспечения скользящего контакта, и упругая сила, связанная с деформацией сдвига, будет действовать в таком направлении, чтобы ограничить поворот рычага 52 педали. Соответственно, рычаг 52 педали слегка поворачивается вокруг оси 64, как видно на фиг.33.
Кроме того, когда сила, действующая соответственно между второй пластинчатой пружиной 120 и второй пластиной 124, предназначенной для обеспечения скользящего контакта, вдоль их поверхностей, превысит максимальную силу статического трения между ними, дистальная концевая часть второй пластинчатой пружины 120 также смещается относительно второй пластины 124, предназначенной для обеспечения скользящего контакта, вдоль плоской пластинчатой части 52А в направлении от осевого стержня 62. Следовательно, упругие силы, которые действуют в таком направлении, чтобы обеспечить возврат рычага 52 педали в исходное положение, представляют собой по существу упругие силы, создаваемые первой пластинчатой пружиной 118 и второй пластинчатой пружиной 120.
Таким образом, десятый вариант осуществления функционирует аналогично вышеописанному шестому варианту осуществления за исключением того, что упругие силы, создаваемые первой пластинчатой пружиной 118 и второй пластинчатой пружиной 120, действуют непосредственно соответственно на первую пластину 122 для обеспечения скользящего контакта и вторую пластину 124 для обеспечения скользящего контакта, и того, что дистальные концевые части первой пластинчатой пружины 118 и второй пластинчатой пружины 120 вызывают деформации сдвига соответственно первой пластины 122 для обеспечения скользящего контакта и второй пластины 124 для обеспечения скользящего контакта. Следовательно, десятый вариант осуществления может обеспечить действия и эффекты, аналогичные действиям и эффектам вышеописанного шестого варианта осуществления, за счет использования пластинчатых пружин в качестве первого и второго возвратных поджимающих средств.
В частности, в соответствии с десятым вариантом осуществления скорость увеличения каждой из сил, с которыми первая пластинчатая пружина 118 и вторая пластинчатая пружина 120 прижимают соответственно первую пластину 122 для обеспечения скользящего контакта и вторую пластину 124 для обеспечения скользящего контакта при увеличении угла поворота рычага 52 педали из исходного положения, больше соответствующей скорости увеличения сил в вышеописанных шестом и седьмом вариантах осуществления. Следовательно, характеристическая кривая F-S для десятого варианта осуществления повторяет кривую гистерезиса, подобную показанной на фиг.35.
Одиннадцатый вариант осуществления изобретения
Фиг.36 представляет собой вид сбоку, показывающий одиннадцатый вариант осуществления исполнительного устройства с педальным управлением в соответствии с настоящим изобретением, при этом устройство выполнено в виде педального устройства акселератора автомобиля типа устройства с электрическим управлением системой привода. Фиг.37 представляет собой увеличенный частичный вид сзади, показывающий одиннадцатый вариант осуществления. Фиг.38 и 39 представляют собой виды спереди, показывающие соответственно первый торсионный стержень и второй торсионный стержень. Фиг.40 и 41 представляют собой увеличенные виды спереди, показывающие одну опору и другую опору опорного кронштейна, если смотреть в направлении оси рычага педали.
В одиннадцатом варианте осуществления первый торсионный стержень 128, который служит в качестве первого возвратного поджимающего средства, и второй торсионный стержень 130, который служит в качестве второго возвратного поджимающего средства, расположены с задней стороны плоской пластинчатой части 52А рычага 52 педали. Торсионные стержни 128 и 130 образованы из стержня, имеющего круглое поперечное сечение. Диаметр торсионного стержня 130 больше диаметра торсионного стержня 128. Соответственно, динамическая жесткость торсионного стержня 130 превышает динамическую жесткость торсионного стержня 128. Тем не менее, данные торсионные стержни могут иметь одинаковую динамическую жесткость, или соотношение величин динамической жесткости может быть обратным по отношению к вышеупомянутому соотношению.
Как показано на фиг.38, первый торсионный стержень 128 имеет торсионную часть 128А стержня и направляющую часть 128В, которые простираются параллельно оси 64 и выровнены относительно друг друга, поворотную консольную часть 128С, которая простирается перпендикулярно от расположенных ближе друг к другу концов торсионной части 128А стержня и направляющей части 128В таким образом, что она имеет форму, напоминающую букву U, и неподвижную консольную часть 128D, простирающуюся перпендикулярно от другого конца торсионной части 128А стержня.
Аналогичным образом, как показано на фиг.39, второй торсионный стержень 130 имеет торсионную часть 130А стержня и направляющую часть 130В, которые проходят параллельно оси 64 и выровнены относительно друг друга, поворотную консольную часть 130С, которая проходит перпендикулярно от расположенных ближе друг к другу концов торсионной части 130А стержня и направляющей части 130В таким образом, что она имеет форму, напоминающую букву U, и неподвижную консольную часть 130D, проходящую перпендикулярно от другого конца торсионной части 130А стержня.
В одиннадцатом варианте осуществления парные опоры 54В опорного кронштейна 54 выполнены с большей толщиной по сравнению с опорами в вышеописанных других вариантах осуществления. Как показано на фиг.40, торсионная часть 128А стержня и неподвижная консольная часть 128D вставлены в канавку, выполненную в одной опоре 54В, в то время как, как показано на фиг.41, направляющая часть 128В вставлена в отверстие, выполненное в другой опоре 54В. Дистальный конец неподвижной консольной части 128D отогнут перпендикулярно и вставлен в отверстие, выполненное в одной опоре 54В, в результате чего неподвижная консольная часть 128D будет зафиксирована относительно опоры 54В.
Аналогичным образом, как показано на фиг.41, торсионная часть 130А стержня и неподвижная консольная часть 130D вставлены в канавку, выполненную в другой опоре 54В, в то время как, как показано на фиг.40, направляющая часть 130В вставлена в отверстие, выполненное в одной опоре 54В. Дистальный конец неподвижной консольной части 130D также отогнут перпендикулярно и вставлен в отверстие, выполненное в другой опоре 54В, в результате чего неподвижная консольная часть 130D будет зафиксирована относительно опоры 54В.
Полуцилиндрический направляющий держатель 132 предусмотрен между парными опорами 54В опорного кронштейна 54 и закреплен как одно целое на верхней поверхности базовой части 54А опорного кронштейна 54. Торсионные части 128А и 130А стержней проходят через соответствующие отверстия, выполненные в направляющем держателе 132, и могут свободно поворачиваться относительно направляющего держателя 132. Направляющие части 128В и 130В могут свободно поворачиваться относительно соответствующих опор 54В.
Первая пластина 134 для обеспечения скользящего контакта, которая образована из смолы и служит в качестве средства для создания первой силы сопротивления, и вторая пластина 136 для обеспечения скользящего контакта, которая образована из смолы и служит в качестве средства для создания второй силы сопротивления, закреплены на задней поверхности плоской пластинчатой части 52А рычага 52 педали. Дистальные концевые части поворотных консольных частей 128С и 130С находятся в контакте соответственно с первой пластиной 134 для обеспечения скользящего контакта и второй пластиной 136 для обеспечения скользящего контакта и слегка прижимают соответствующие пластины, предназначенные для обеспечения скользящего контакта, к плоской пластинчатой части 52А.
При нажатии на рычаг 52 педали, чтобы тем самым повернуть его относительно опорного кронштейна 54, торсионные стержни 128 и 130 обеспечивают увеличение соответствующих возвращающих поджимающих сил, приложенных к рычагу 52 педали, в результате чего увеличиваются соответствующие прижимающие силы, действующие на пластины 134 и 136 для обеспечения скользящего контакта. Кроме того, поворотные консольные части 128С и 130С торсионных стержней 128 и 130 обеспечивают приложение таких сил, чтобы вызвать упругие деформации сдвига соответствующих пластин 134 и 136, предназначенных для обеспечения скользящего контакта, вдоль плоской пластинчатой части 52А в направлении от осевого стержня 62.
Принимая во внимание направление деформации сдвига пластин 134 и 136 для обеспечения скользящего контакта, модуль K1 упругости смолы, используемой для образования пластины 134 для обеспечения скользящего контакта, задают сравнительно высоким, а модуль K2 упругости смолы, используемой для образования пластины 136 для обеспечения скользящего контакта, устанавливают меньшим, чем модуль K1 упругости смолы, используемой для образования пластины 134 для обеспечения скользящего контакта. Данные модули упругости могут быть обеспечены посредством использования разных смол для образования пластин 134 и 136 для обеспечения скользящего контакта или посредством образования неровностей, таких как множество прорезей, проходящих вдоль продольного направления рычага 52 педали.
Для поверхностей пластин 134 и 136 для обеспечения скользящего контакта обеспечен низкий коэффициент трения за счет выполнения обработки поверхности, такой как покрытие тефлоном (зарегистрированный товарный знак). В частности, коэффициент статического трения поверхности первой пластины 134, предназначенной для обеспечения скользящего контакта, относительно поворотной консольной части 128С (первый коэффициент µs1 статического трения) задан меньшим, чем коэффициент статического трения поверхности второй пластины 136, предназначенной для обеспечения скользящего контакта, относительно поворотной консольной части 130С (второй коэффициент µs2 статического трения).
Поскольку значения динамической жесткости торсионных стержней 128 и 130 установлены так, как упомянуто выше, прижимающая сила, с которой поворотная консольная часть 130С торсионного стержня 130 прижимает вторую пластину 136 для обеспечения скользящего контакта, превышает прижимающую силу, с которой поворотная консольная часть 128С торсионного стержня 128 прижимает первую пластину 134 для обеспечения скользящего контакта. Соответственно, максимальная сила статического трения между поворотной консольной частью 130С и второй пластиной 136 для обеспечения скользящего контакта превышает максимальную силу статического трения между поворотной консольной частью 128С и первой пластиной 134 для обеспечения скользящего контакта.
Таким образом, поверхность поворотной консольной части 128С и поверхность первой пластины 134 для обеспечения скользящего контакта, которые введены во фрикционное взаимодействие друг с другом, образуют первую пару поверхностей трения, предназначенную для создания первой силы сопротивления посредством силы трения. Поверхность поворотной консольной части 130С и поверхность второй пластины 136 для обеспечения скользящего контакта, которые введены во фрикционное взаимодействие друг с другом, образуют вторую пару поверхностей трения, предназначенную для создания второй силы сопротивления посредством силы трения. Вторая пластина 136 для обеспечения скользящего контакта также служит в качестве элемента для обеспечения смещения, который за счет его упругой деформации обеспечивает возможность перемещения второй пары поверхностей трения, имеющей больший коэффициент статического трения, вместе с относительным смещением рычага 52 педали относительно опорного кронштейна 54.
Торсионная часть 128А первого торсионного стержня 128 и торсионная часть 130А второго торсионного стержня 130 расположены на некотором расстоянии от оси 64 и проходят параллельно оси 64. Соответственно, когда рычаг 52 педали поворачивается вокруг оси 64, дистальные концы поворотных консольных частей 128С и 130С «пытаются» сместиться соответственно относительно первой и второй пластин 134 и 136, предназначенных для обеспечения скользящего контакта, в продольном направлении рычага 52 педали.
Однако дистальные концы поворотных консольных частей 128С и 130С введены во фрикционное взаимодействие соответственно с первой и второй пластинами 134 и 136 для обеспечения скользящего контакта. Соответственно, когда силы, действующие соответственно между дистальными концами поворотных консольных частей 128С и 130С и соответствующими первой и второй пластинами 134 и 136, предназначенными для обеспечения скользящего контакта, вдоль их поверхностей, равны соответствующим максимальным силам статического трения между ними или меньше указанных максимальных сил статического трения, дистальные концы поворотных консольных частей 128С и 130С не смещаются относительно соответствующих первой и второй пластин 134 и 136 для обеспечения скользящего контакта. Следовательно, рычаг 52 педали не поворачивается относительно опорного кронштейна 54.
Когда сила, действующая соответственно между дистальным концом поворотной консольной части 128С и первой пластиной 134, предназначенной для обеспечения скользящего контакта, вдоль их поверхностей, превысит максимальную силу статического трения между ними, дистальный конец поворотной консольной части 128С смещается относительно первой пластины 134 для обеспечения скользящего контакта. Следовательно, рычаг 52 педали поворачивается вокруг оси 64 относительно опорного кронштейна 54.
Тем не менее, поскольку дистальный конец поворотной консольной части 130С введен во фрикционное взаимодействие со второй пластиной 136 для обеспечения скользящего контакта, в данной части для обеспечения фрикционного взаимодействия дистальный конец поворотной консольной части 130С не смещается относительно второй пластины 136 для обеспечения скользящего контакта и вызывает упругую деформацию второй пластины 136, предназначенной для обеспечения скользящего контакта, в направлении сдвига. Таким образом, в данном состоянии упругие силы, которые «стремятся» вернуть рычаг 52 педали в исходное положение, представляют собой упругие силы, создаваемые торсионными стержнями 128 и 130, и упругую силу, связанную с упругой деформацией второй пластины 136 для обеспечения скользящего контакта.
Когда сила, действующая соответственно между дистальным концом поворотной консольной части 130С и второй пластиной 136, предназначенной для обеспечения скользящего контакта, вдоль их поверхностей, превысит максимальную силу статического трения между ними, дистальный конец поворотной консольной части 130С также будет смещаться относительно второй пластины 136 для обеспечения скользящего контакта. Таким образом, в данном состоянии вторая пластина 136 для обеспечения скользящего контакта не подвергается упругой деформации в направлении сдвига посредством дистального конца поворотной консольной части 130С. Следовательно, упругие силы, которые «стремятся» вернуть рычаг 52 педали в исходное положение, представляют собой упругие силы, создаваемые торсионными стержнями 128 и 130.
Соответственно, в одиннадцатом варианте осуществления зависимость между усилием F нажима, приложенным к рычагу 52 педали водителем во время увеличения усилия F нажима от 0, и ходом S центра поверхности нажима плоской пластинчатой части 52А также аналогична соответствующей зависимости в вышеописанном первом варианте осуществления, то есть характеристика F-S представляет собой характеристику с двумя перегибами, подобную показанной на фиг.6. Кроме того, в одиннадцатом варианте осуществления, по мере увеличения хода S рычага 52 педали, силы, с которыми дистальные концы поворотных консольных частей 128С и 130С прижимают соответственно первую и вторую пластины 134 и 136 для обеспечения скользящего контакта, постепенно увеличиваются, так что силы трения между дистальными концами поворотных консольных частей 128С и 130С и соответствующими первой и второй пластинами 134 и 136 для обеспечения скользящего контакта постепенно увеличиваются. Таким образом, характеристическая кривая F-S во время увеличения и уменьшения усилия нажима, приложенного к рычагу 52 педали, повторяет кривую гистерезиса, подобную показанной на фиг.35.
Таким образом, одиннадцатый вариант осуществления функционирует аналогично вышеописанному шестому варианту осуществления за исключением того, что упругие силы, создаваемые торсионными стержнями 128 и 130, действуют непосредственно соответственно на первую пластину 134 для обеспечения скользящего контакта и вторую пластину 136 для обеспечения скользящего контакта, и того, что дистальные концевые части поворотных консольных частей 128С и 130С вызывают деформации сдвига соответственно первой пластины 134 для обеспечения скользящего контакта и второй пластины 136 для обеспечения скользящего контакта. Следовательно, одиннадцатый вариант осуществления может обеспечить действия и эффекты, аналогичные действиям и эффектам вышеописанного десятого варианта осуществления, за счет использования торсионных стержней в качестве первого и второго возвратных поджимающих средств.
Двенадцатый вариант осуществления изобретения
Фиг.42 представляет собой вид сбоку, показывающий двенадцатый вариант осуществления исполнительного устройства с педальным управлением в соответствии с настоящим изобретением, при этом устройство выполнено в виде педального устройства акселератора автомобиля типа устройства с электрическим управлением системой привода. Фиг.43 представляет собой увеличенный частичный вид сзади, показывающий двенадцатый вариант осуществления. Фиг.44 представляет собой увеличенное поперечное сечение, показывающее существенную часть двенадцатого варианта осуществления.
В двенадцатом варианте осуществления первая цилиндрическая винтовая пружина 138 сжатия, которая служит в качестве первого возвратного поджимающего средства, и вторая цилиндрическая винтовая пружина 140 сжатия, которая служит в качестве второго возвратного поджимающего средства, расположены с задней стороны плоской пластинчатой части 52А рычага 52 педали. Пластина 142 для крепления пружин выполнена за одно целое с базовой частью 54А опорного кронштейна 54. Первая цилиндрическая винтовая пружина 138 сжатия и вторая цилиндрическая винтовая пружина 140 сжатия расположены с возможностью их упругого деформирования между задней поверхностью плоской пластинчатой части 52А рычага 52 педали и пластиной 142 для крепления пружин. Как показано на фиг.42, плоская пластинчатая часть 52А рычага 52 педали и пластина 142 для крепления пружин установлены таким образом, что они будут по существу параллельными друг другу, когда рычаг 52 педали установлен в его исходном положении.
Цилиндрические винтовые пружины 138 и 140 сжатия проходят концентрично относительно друг друга и выровнены относительно оси 144, которая проходит по касательной к воображаемой дуге, проходящей вокруг оси 64. Ось 144 проходит по существу перпендикулярно плоской пластинчатой части 52А рычага 52 педали и пластине 142 для крепления пружин, когда рычаг 52 педали установлен в его исходном положении. Цилиндрическая винтовая пружина 138 сжатия расположена с наружной стороны цилиндрической винтовой пружины 140 сжатия и расположена на определенном расстоянии в радиальном направлении от цилиндрической винтовой пружины 140 сжатия. Диаметр проволочного материала, используемого для образования цилиндрической винтовой пружины 138 сжатия, больше диаметра проволочного материала, используемого для образования цилиндрической винтовой пружины 140 сжатия. Соответственно, жесткость цилиндрической винтовой пружины 138 сжатия выше жесткости цилиндрической винтовой пружины 140 сжатия. Тем не менее, данные цилиндрические винтовые пружины сжатия могут иметь одинаковую жесткость пружин, или соотношение значений жесткости пружин может быть обратным по отношению к вышеупомянутому соотношению.
Один конец первой пластины 146 для обеспечения скользящего контакта, который служит в качестве средства для создания первой силы сопротивления, прикреплен к задней поверхности плоской пластинчатой части 52А рычага 52 педали, в то время как один конец второй пластины 148 для обеспечения скользящего контакта, который служит в качестве средства для создания второй силы сопротивления, прикреплен к пластине 142 для крепления пружин. Первая пластина 146 для обеспечения скользящего контакта и вторая пластина 148 для обеспечения скользящего контакта образованы из смолы, и каждая из них имеет по существу полуцилиндрическую форму и проходит вдоль оси 144.
Каждая из пластин 146 и 148 для обеспечения скользящего контакта имеет длину, которая меньше расстояния L между плоской пластинчатой частью 52А и пластиной 142 для крепления пружин, когда рычаг 52 педали расположен в его исходном положении, и больше половины расстояния L. Соответственно, даже тогда, когда рычаг 52 педали установлен в его исходном положении, пластины 146 и 148 для обеспечения скользящего контакта простираются, перекрывая друг друга. Пластины 146 и 148 для обеспечения скользящего контакта расположены со стороны оси 64 относительно цилиндрических винтовых пружин 138 и 140 сжатия, и внутренние цилиндрические поверхности пластин 146 и 148 для обеспечения скользящего контакта находятся в контакте с соответствующими цилиндрическими винтовыми пружинами 138 и 140 сжатия, в результате чего они слегка давят на соответствующие цилиндрические винтовые пружины сжатия.
Модуль K1 упругости первой пластины 146 для обеспечения скользящего контакта, измеренный на ее внутренней цилиндрической поверхности вдоль ее продольного направлении, является сравнительно большим, и модуль K2 упругости второй пластины 148 для обеспечения скользящего контакта, измеренный на ее внутренней цилиндрической поверхности вдоль ее продольного направления, задан меньшим, чем модуль K1 упругости первой пластины 146 для обеспечения скользящего контакта, измеренный на ее внутренней цилиндрической поверхности вдоль ее продольного направления. Данные модули упругости могут быть обеспечены посредством использования разных смол для образования пластин 146 и 148 для обеспечения скользящего контакта или посредством образования неровностей, таких как множество прорезей, проходящих вдоль продольного направления пластин для обеспечения скользящего контакта.
Для внутренних цилиндрических поверхностей пластин 146 и 148 для обеспечения скользящего контакта обеспечен низкий коэффициент трения за счет выполнения обработки поверхности, такой как покрытие тефлоном (зарегистрированный товарный знак). В частности, коэффициент статического трения внутренней цилиндрической поверхности первой пластины 146, предназначенной для обеспечения скользящего контакта, относительно цилиндрической винтовой пружины 138 сжатия (первый коэффициент µs1 статического трения) задан меньшим, чем коэффициент статического трения внутренней цилиндрической поверхности второй пластины 148, предназначенной для обеспечения скользящего контакта, относительно цилиндрической винтовой пружины 140 сжатия (второй коэффициент µs2 статического трения).
Прижимающая сила, с которой цилиндрическая винтовая пружина 138 сжатия давит на первую пластину 146 для обеспечения скользящего контакта, и прижимающая сила, с которой цилиндрическая винтовая пружина 140 сжатия давит на вторую пластину 148 для обеспечения скользящего контакта, по существу эквивалентны друг другу. Соответственно, максимальная сила статического трения между цилиндрической винтовой пружиной 140 сжатия и второй пластиной 148 для обеспечения скользящего контакта превышает максимальную силу статического трения между цилиндрической винтовой пружиной 138 сжатия и первой пластиной 146 для обеспечения скользящего контакта.
Таким образом, поверхность цилиндрической винтовой пружины 138 сжатия и поверхность первой пластины 146 для обеспечения скользящего контакта, которые введены во фрикционное взаимодействие друг с другом, образуют первую пару поверхностей трения, предназначенную для создания первой силы сопротивления посредством силы трения. Поверхность цилиндрической винтовой пружины 140 сжатия и поверхность второй пластины 148 для обеспечения скользящего контакта, которые введены во фрикционное взаимодействие друг с другом, образуют вторую пару поверхностей трения, предназначенную для создания второй силы сопротивления посредством силы трения. Вторая пластина 148 для обеспечения скользящего контакта также служит в качестве элемента для обеспечения смещения, который за счет его упругой деформации обеспечивает возможность перемещения второй пары поверхностей трения, имеющей больший коэффициент статического трения, вместе с относительным смещением рычага 52 педали относительно опорного кронштейна 54.
Цилиндрические винтовые пружины 138 и 140 сжатия и пластины 146 и 148 для обеспечения скользящего контакта проходят вдоль оси 144, когда рычаг 52 педали расположен в его исходном положении, и цилиндрические винтовые пружины 138 и 140 сжатия расположены с возможностью упругого деформирования между плоской пластинчатой частью 52А рычага 52 педали и пластиной 142 для крепления пружин. Соответственно, когда рычаг 52 педали поворачивается вокруг оси 64, расстояние L между плоской пластинчатой частью 52А рычага 52 педали и пластиной 142 для крепления пружин изменяется; таким образом, цилиндрические винтовые пружины 138 и 140 сжатия «стремятся» сместиться относительно пластин 146 и 148, предназначенных для обеспечения скользящего контакта, вдоль оси 144.
Однако пластины 146 и 148 для обеспечения скользящего контакта находятся в контакте с соответствующими цилиндрическими винтовыми пружинами 138 и 140 сжатия и проходят, перекрывая друг друга. Соответственно, когда силы, действующие соответственно между цилиндрическими винтовыми пружинами 138 и 140 сжатия и соответствующими пластинами 146 и 148, предназначенными для обеспечения скользящего контакта, вдоль их продольного направления, равны соответствующим максимальным силам статического трения между ними или меньше соответствующих максимальных сил статического трения между ними, витки цилиндрических винтовых пружин 138 и 140 сжатия не смещаются относительно соответствующих пластин 146 и 148 для обеспечения скользящего контакта. Следовательно, рычаг 52 педали не поворачивается относительно опорного кронштейна 54.
Когда сила, действующая соответственно между цилиндрической винтовой пружиной 138 сжатия и пластиной 146, предназначенной для обеспечения скользящего контакта, вдоль ее продольного направления, превысит максимальную силу статического трения между ними, витки цилиндрической винтовой пружины 138 сжатия смещаются относительно пластины 146 для обеспечения скользящего контакта. Следовательно, рычаг 52 педали поворачивается вокруг оси 64 относительно опорного кронштейна 54.
Тем не менее, поскольку цилиндрическая винтовая пружина 140 сжатия введена во фрикционное взаимодействие с пластиной 148 для обеспечения скользящего контакта, в данной части для обеспечения фрикционного взаимодействия витки цилиндрической винтовой пружины 140 сжатия не смещаются относительно пластины 148 для обеспечения скользящего контакта. Соответственно, цилиндрическая винтовая пружина 140 сжатия деформируется с обеспечением ее свободного сжатия в ее части между плоской пластинчатой частью 52А и выступающим концом пластины 148 для обеспечения скользящего контакта; однако часть цилиндрической винтовой пружины 140 сжатия, которая введена во фрикционное взаимодействие с частью пластины 148 для обеспечения скользящего контакта, деформируется с обеспечением ее сжатия, при этом она давит на часть полуцилиндрической внутренней поверхности пластины 148 для обеспечения скользящего контакта. Таким образом, в данном состоянии упругими силами, которые «стремятся» вернуть рычаг 52 педали в исходное положение, являются упругая сила, создаваемая цилиндрической винтовой пружиной 138 сжатия, упругая сила, создаваемая вышеупомянутой подвергнутой деформации сжатия частью цилиндрической винтовой пружины 140 сжатия, и упругая сила, связанная с деформацией сжатия пластины 148 для обеспечения скользящего контакта.
Когда сила, действующая соответственно между цилиндрической винтовой пружиной 140 сжатия и пластиной 148, предназначенной для обеспечения скользящего контакта, вдоль ее продольного направления, превысит максимальную силу статического трения между ними, витки цилиндрической винтовой пружины 140 сжатия также сместятся относительно пластины 148 для обеспечения скользящего контакта. Таким образом, поскольку в данном состоянии цилиндрическая винтовая пружина 140 сжатия также подвергается деформации сжатия на всей ее длине, упругие силы, которые «стремятся» вернуть рычаг 52 педали в исходное положение, представляют собой упругие силы, создаваемые цилиндрическими винтовыми пружинами 138 и 140 сжатия. Следовательно, динамическая жесткость всей пружины, предназначенной для возврата рычага 52 педали путем поджима, уменьшается.
Соответственно, в двенадцатом варианте осуществления зависимость между усилием F нажима, приложенным к рычагу 52 педали водителем во время увеличения усилия F нажима от 0, и ходом S центра поверхности нажима плоской пластинчатой части 52А также аналогична соответствующей зависимости в вышеописанном первом варианте осуществления, то есть характеристика F-S представляет собой характеристику с двумя перегибами, подобную показанной на фиг.6. Кроме того, в двенадцатом варианте осуществления по мере увеличения хода S рычага 52 педали цилиндрические винтовые пружины 138 и 140 сжатия изгибаются таким образом, что их центральные части смещаются вниз, и силы, с которыми цилиндрические винтовые пружины 138 и 140 сжатия давят на соответствующие пластины 146 и 148 для обеспечения скользящего контакта, постепенно увеличиваются, так что силы трения между ними постепенно увеличиваются. Таким образом, характеристическая кривая F-S во время увеличения и уменьшения усилия нажима, приложенного к рычагу 52 педали, повторяет кривую гистерезиса, подобную показанной на фиг.35.
Таким образом, двенадцатый вариант осуществления функционирует аналогично вышеописанному шестому варианту осуществления за исключением того, что пластины 146 и 148 для обеспечения скользящего контакта находятся в скользящем контакте с соответствующими цилиндрическими винтовыми пружинами 138 и 140 сжатия вдоль их продольного направления и упруго деформируются вдоль их продольного направления. Следовательно, двенадцатый вариант осуществления может обеспечить действия и эффекты, аналогичные действиям и эффектам вышеописанного шестого варианта осуществления, за счет использования цилиндрических винтовых пружин сжатия в качестве первого и второго возвратных поджимающих средств.
В частности, в соответствии с двенадцатым вариантом осуществления, когда ход рычага 52 педали станет равным определенной величине, выступающие концы пластин 146 и 148 для обеспечения скользящего контакта входят в контакт соответственно с пластиной 142 для крепления пружин и плоской пластинчатой частью 52А рычага 52 педали, тем самым ограничивая дальнейший поворот рычага 52 педали. Следовательно, ограничитель полного открытия может быть устранен или уменьшен в размерах.
В проиллюстрированном варианте осуществления один конец первой пластины 146 для обеспечения скользящего контакта прикреплен к задней поверхности плоской пластинчатой части 52А рычага 52 педали, и один конец второй пластины 148 для обеспечения скользящего контакта прикреплен к пластине 142 для крепления пружин. Однако данная конфигурация может быть модифицирована следующим образом: один конец первой пластины 146 для обеспечения скользящего контакта прикреплен к пластине 142 для крепления пружин, и один конец второй пластины 148 для обеспечения скользящего контакта прикреплен к задней поверхности плоской пластинчатой части 52А рычага 52 педали.
Тринадцатый вариант осуществления изобретения
Фиг.45 представляет собой вид сбоку, показывающий тринадцатый вариант осуществления исполнительного устройства с педальным управлением в соответствии с настоящим изобретением, при этом устройство выполнено в виде педального устройства акселератора автомобиля типа устройства с электрическим управлением системой привода. Фиг.46 представляет собой увеличенный частичный вид сзади, показывающий тринадцатый вариант осуществления. Фиг.47 представляет собой увеличенное поперечное сечение, показывающее существенную часть тринадцатого варианта осуществления.
В тринадцатом варианте осуществления аналогично вышеописанному двенадцатому варианту осуществления пластина 142 для крепления пружин выполнена за одно целое с базовой частью 54А опорного кронштейна 54, и первая цилиндрическая винтовая пружина 150 сжатия и вторая цилиндрическая винтовая пружина 152 сжатия расположены с возможностью их упругого деформирования между задней поверхностью плоской пластинчатой части 52А рычага 52 педали и пластиной 142 для крепления пружин. Спиральная пружина 150 сжатия представляет собой коническую рессору, образованную посредством наматывания полосовой стали с образованием формы, напоминающей пивную бочку, и отдельные витки введены во фрикционное взаимодействие друг с другом. Цилиндрическая винтовая пружина 152 сжатия представляет собой обычную цилиндрическую винтовую пружину сжатия, образованную посредством наматывания стальной проволоки с образованием цилиндрической формы. Спиральная пружина 150 сжатия может иметь форму, напоминающую усеченный конус или песочные часы.
Аналогично цилиндрическим винтовым пружинам 138 и 140 сжатия по вышеописанному двенадцатому варианту осуществления винтовые пружины 150 и 152 сжатия проходят концентрично относительно друг друга и выровнены относительно оси 144. Цилиндрическая винтовая пружина 152 сжатия расположена с наружной стороны винтовой пружины 150 сжатия и расположена на определенном расстоянии в радиальном направлении от винтовой пружины 150 сжатия. Винтовые пружины 150 и 152 сжатия могут иметь одинаковую жесткость пружин или разные значения жесткости пружин.
Одни концы полуцилиндрических пластин 154 и 156 для обеспечения скользящего контакта, которые образованы из смолы и служат в качестве средства для создания второй силы сопротивления, прикреплены соответственно к задней поверхности плоской пластинчатой части 52А рычага 52 педали и к пластине 142 для крепления пружин. Пластина 154 для обеспечения скользящего контакта находится в контакте с цилиндрической винтовой пружиной 152 сжатия с ее верхней стороны, и пластина 156 для обеспечения скользящего контакта находится в контакте с цилиндрической винтовой пружиной 152 сжатия с ее нижней стороны. Пластины 154 и 156, предназначенные для обеспечения скользящего контакта, проходят вокруг оси 144 в пределах дуги, составляющей менее 180 градусов вокруг оси 144. Силы, с которыми пластины 154 и 156 для обеспечения скользящего контакта сжимают цилиндрическую винтовую пружину 152 сжатия в радиальном направлении, заданы эквивалентными силе, с которой витки винтовой пружины 150 сжатия сдавливают друг друга в радиальном направлении.
Аналогично пластинам 146 и 148 для обеспечения скользящего контакта по вышеописанному двенадцатому варианту осуществления каждая из пластин 154 и 156 для обеспечения скользящего контакта имеет длину, которая меньше расстояния L между плоской пластинчатой частью 52А и пластиной 142 для крепления пружин в то время, когда рычаг 52 педали расположен в его исходном положении, и больше половины расстояния L. Соответственно, даже тогда, когда рычаг 52 педали установлен в его исходном положении, пластины 154 и 156 для обеспечения скользящего контакта простираются, перекрывая друг друга. Пластины 154 и 156 для обеспечения скользящего контакта могут быть разнесены друг от друга в направлении, отличном от направления, перпендикулярного к оси 144, например в горизонтальном направлении, при условии, что пластины 154 и 156 для обеспечения скользящего контакта не будут сталкиваться друг с другом даже тогда, когда расстояние L между плоской пластинчатой частью 52А и пластиной 142 для крепления пружин становится малым в результате поворота рычага 52 педали.
Для поверхностей витков винтовой пружины 150 сжатия, которые введены во фрикционное взаимодействие друг с другом, и внутренних цилиндрических поверхностей пластин 154 и 156, предназначенных для обеспечения скользящего контакта, обеспечен низкий коэффициент трения за счет выполнения обработки поверхности, такой как покрытие тефлоном (зарегистрированный товарный знак). В частности, коэффициент статического трения поверхностей витков винтовой пружины 150 сжатия, которые введены во фрикционное взаимодействие друг с другом (первый коэффициент µs1 статического трения), задан меньшим, чем коэффициент статического трения внутренних цилиндрических поверхностей пластин 154 и 156, предназначенных для обеспечения скользящего контакта, относительно цилиндрической винтовой пружины 152 сжатия (второй коэффициент µs2 статического трения).
Как упомянуто выше, прижимающая сила, с которой винтовая пружина 150 сжатия давит на первую пластину 146 для обеспечения скользящего контакта, с которой витки пружины 150 сжатия давят друг на друга, и прижимающая сила, с которой цилиндрическая винтовая пружина 152 сжатия давит на пластины 154 и 156 для обеспечения скользящего контакта, по существу эквивалентны друг другу. Соответственно, максимальная сила статического трения между цилиндрической винтовой пружиной 152 сжатия и пластинами 154 и 156 для обеспечения скользящего контакта превышает максимальную силу статического трения между витками винтовой пружины 150 сжатия. Отдельные витки винтовой пружины 150 сжатия служат в качестве средства для создания первой силы сопротивления относительно друг друга.
Таким образом, поверхности витков винтовой пружины 150 сжатия, которые введены во фрикционное взаимодействие друг с другом, образуют первую пару поверхностей трения, предназначенную для создания первой силы сопротивления посредством силы трения. Поверхность цилиндрической винтовой пружины 152 сжатия и поверхности пластин 154 и 156 для обеспечения скользящего контакта, которые введены во фрикционное взаимодействие друг с другом, образуют вторую пару поверхностей трения, предназначенную для создания второй силы сопротивления посредством силы трения. Пластины 154 и 156 для обеспечения скользящего контакта также совместно служат в качестве элемента для обеспечения смещения, который за счет их упругой деформации обеспечивает возможность перемещения второй пары поверхностей трения, имеющей больший коэффициент статического трения, вместе с относительным смещением рычага 52 педали относительно опорного кронштейна 54.
Как было упомянуто выше, витки винтовой пружины 150 сжатия введены во фрикционное взаимодействие друг с другом, и внутренние цилиндрические поверхности пластин 154 и 156 для обеспечения скользящего контакта введены во фрикционное взаимодействие с цилиндрической винтовой пружиной 152 сжатия. Соответственно, даже когда усилие нажима приложено к рычагу 52 педали, если сила, действующая вдоль оси 144 между введенными во фрикционное взаимодействие поверхностями витков винтовой пружины 150 сжатия, и сила, действующая соответственно вдоль оси 144 между пластинами 154 и 156 для обеспечения скользящего контакта и цилиндрической винтовой пружиной 152 сжатия, равны соответствующим максимальным силам статического трения между ними или меньше указанных максимальных сил статического трения, витки винтовой пружины 150 сжатия не смещаются относительно друг друга, и цилиндрическая винтовая пружина 152 сжатия не смещается относительно пластин 154 и 156 для обеспечения скользящего контакта. Следовательно, рычаг 52 педали не поворачивается относительно опорного кронштейна 54.
Когда сила, действующая вдоль оси 144 между введенными во фрикционное взаимодействие поверхностями витков винтовой пружины 150 сжатия, превысит максимальную силу статического трения между ними, витки винтовой пружины 150 сжатия смещаются вдоль оси 144 относительно друг друга; таким образом, винтовая пружина 150 сжатия подвергается упругой деформации сжатия. Следовательно, рычаг 52 педали поворачивается вокруг оси 64 относительно опорного кронштейна 54.
Тем не менее, поскольку цилиндрическая винтовая пружина 152 сжатия введена во фрикционное взаимодействие с пластинами 154 и 156 для обеспечения скользящего контакта, витки цилиндрической винтовой пружины 152 сжатия не смещаются относительно пластин 154 и 156 для обеспечения скользящего контакта. Соответственно, цилиндрическая винтовая пружина 152 сжатия деформируется с обеспечением ее сжатия, при этом она давит на участки полуцилиндрических внутренних поверхностей пластин 154 и 156 для обеспечения скользящего контакта. Таким образом, в данном состоянии упругими силами, которые «стремятся» вернуть рычаг 52 педали в исходное положение, являются упругие силы, создаваемые винтовыми пружинами 150 и 152 сжатия, и упругие силы, связанные с деформациями сжатия пластин 154 и 156 для обеспечения скользящего контакта.
Когда сила, действующая соответственно вдоль оси 144 между пластинами 154 и 156 для обеспечения скользящего контакта и цилиндрической винтовой пружиной 152 сжатия, превысит максимальную силу статического трения между ними, витки цилиндрической винтовой пружины 152 сжатия смещаются относительно пластин 154 и 156 для обеспечения скользящего контакта. Таким образом, поскольку в данном состоянии цилиндрическая винтовая пружина 152 сжатия подвергается деформации сжатия, по существу не вызывая упругих деформаций пластин 154 и 156 для обеспечения скользящего контакта, упругие силы, которые «стремятся» вернуть рычаг 52 педали в исходное положение, представляют собой упругие силы, создаваемые винтовыми пружинами 150 и 152 сжатия. Следовательно, динамическая жесткость всей пружины, предназначенной для возврата рычага 52 педали путем поджима, уменьшается.
Соответственно, в тринадцатом варианте осуществления зависимость между усилием F нажима, приложенным к рычагу 52 педали водителем во время увеличения усилия F нажима от 0, и ходом S центра поверхности нажима плоской пластинчатой части 52А также аналогична соответствующей зависимости в вышеописанном первом варианте осуществления, то есть характеристика F-S представляет собой характеристику с двумя перегибами, подобную показанной на фиг.6. Кроме того, в тринадцатом варианте осуществления, по мере увеличения хода S рычага 52 педали, длина цилиндрической винтовой пружины 152 сжатия уменьшается, а диаметр цилиндрической винтовой пружины 152 сжатия увеличивается, в то время как пластины 154 и 156 для обеспечения скользящего контакта ограничивают увеличение диаметра цилиндрической винтовой пружины 152 сжатия. Соответственно, сила, с которой цилиндрическая винтовая пружина 152 сжатия давит на пластины 154 и 156 для обеспечения скользящего контакта, постепенно увеличивается. Таким образом, характеристическая кривая F-S во время увеличения и уменьшения усилия нажима, приложенного к рычагу 52 педали, повторяет кривую гистерезиса, подобную показанной на фиг.17.
Таким образом, тринадцатый вариант осуществления также функционирует аналогично вышеописанному двенадцатому варианту осуществления. Следовательно, в соответствии с тринадцатым вариантом осуществления даже тогда, когда винтовая пружина сжатия, которая служит в качестве первого возвратного поджимающего средства, представляет собой коническую рессору (спиральную пружину), имеющую витки, которые введены во фрикционное взаимодействие друг с другом, могут быть обеспечены действия и эффекты, аналогичные действиям и эффектам вышеописанного шестого варианта осуществления.
В частности, в соответствии с тринадцатым вариантом осуществления аналогично вышеописанному двенадцатому варианту осуществления, когда ход рычага 52 педали станет равным определенной величине, выступающие концы пластин 154 и 156 для обеспечения скользящего контакта входят в контакт соответственно с пластиной 142 для крепления пружин и плоской пластинчатой частью 52А рычага 52 педали, тем самым ограничивая дальнейший поворот рычага 52 педали. Следовательно, ограничитель полного открытия может быть устранен или уменьшен в размерах.
В соответствии с вышеописанными шестым-тринадцатым вариантами осуществления возвратное поджимающее средство имеет первое и второе возвратные поджимающее средства, и средства для создания первой и второй сил сопротивления находятся в скользящем контакте соответственно с первым и вторым возвратными поджимающими средствами. Таким образом, по сравнению с первым-пятым вариантами осуществления, описанными ранее, и четырнадцатым и пятнадцатым вариантами осуществления, которые будут описаны далее, в которых предусмотрено только одно возвратное поджимающее средство, может быть повышена степень свободы при установлении характера изменения воздействующей силы, приложенной к рычагу 52 педали, в зависимости от относительного смещения рычага 52 педали относительно опорного кронштейна 54.
В соответствии с вышеописанными шестым-тринадцатым вариантами осуществления отсутствует необходимость в размещении упругого элемента, такого как прокладка, в зоне, в которой опорный кронштейн 54 обеспечивает опору для рычага 52 педали с возможностью поворота. Таким образом, по сравнению с вышеописанными первым-пятым вариантами осуществления опорный кронштейн 54 может обеспечить опору для рычага 52 педали с возможностью поворота в хорошем состоянии без люфта и могут быть уменьшены колебания характеристики F-S, вызванные «рычажным» воздействием рычага 52 педали на опорный кронштейн 54.
Четырнадцатый вариант осуществления изобретения
Фиг.48 представляет собой вид сбоку, показывающий четырнадцатый вариант осуществления исполнительного устройства с педальным управлением в соответствии с настоящим изобретением, при этом устройство выполнено в виде педального устройства акселератора автомобиля типа устройства с электрическим управлением системой привода. Фиг.49 представляет собой увеличенный частичный вид сзади, показывающий четырнадцатый вариант осуществления.
В четырнадцатом варианте осуществления одна цилиндрическая винтовая пружина 160 кручения, которая служит в качестве возвратного поджимающего средства, расположена с задней стороны плоской пластинчатой части 52А рычага 52 педали. Цилиндрическая винтовая пружина 160 проходит вдоль оси 64 таким образом, что она окружает осевой стержень 62. Первый элемент 162 для обеспечения скользящего контакта, который образован из смолы и служит в качестве средства для создания первой силы сопротивления, и второй элемент 164 для обеспечения скользящего контакта, который образован из смолы и служит в качестве средства для создания второй силы сопротивления, расположены под цилиндрической винтовой пружиной 160. Элементы 162 и 164 для обеспечения скользящего контакта закреплены на верхней поверхности базовой части 54А опорного кронштейна 54 в таком состоянии, что они проходят вдоль оси 64 и разнесены друг от друга в направлении, перпендикулярном оси 64.
Элементы 162 и 164 для обеспечения скользящего контакта принимают форму, аналогичную той, которая получена посредством разделения пополам в продольном направлении элемента 110 для обеспечения скользящего контакта по вышеописанному восьмому варианту осуществления, и имеют соответственно первую канавку 166 для обеспечения скользящего контакта и вторую канавку 168 для обеспечения скользящего контакта, которые образованы на их верхних поверхностях и каждая из которых имеет сечение, соответствующее четверти круга. Цилиндрическая винтовая пружина 160 находится в контакте с поверхностями канавок 166 и 168 для обеспечения скользящего контакта, выполненных в элементах 162 и 164 для обеспечения скользящего контакта, на всей их длине и слегка давит на поверхности канавок 166 и 168 для обеспечения скользящего контакта в радиальном направлении наружу.
Ввиду упругих деформаций первой и второй канавок 166 и 168, предназначенных для обеспечения скользящего контакта, в направлении вдоль окружности, предпочтительно, чтобы модуль K1 упругости смолы, используемой для образования первого элемента 162 для обеспечения скользящего контакта, был сравнительно большим, а модуль K2 упругости смолы, используемой для образования второго элемента 164 для обеспечения скользящего контакта, был меньше модуля K1 упругости смолы, используемой для образования первого элемента 162 для обеспечения скользящего контакта.
Цилиндрическая винтовая пружина 160 расположена таким образом, что по мере увеличения угла поворота рычага 52 педали из исходного положения цилиндрическая винтовая пружина 160 упруго деформируется в направлении разматывания витков. Соответственно, по мере увеличения угла поворота рычага 52 педали из исходного положения сила, с которой цилиндрическая винтовая пружина 160 давит на поверхности канавок 166 и 168 для обеспечения скользящего контакта, постепенно увеличивается, так что силы трения между цилиндрической винтовой пружиной 160 и поверхностями канавок 166 и 168 для обеспечения скользящего контакта постепенно увеличиваются.
Для поверхностей канавок 166 и 168 для обеспечения скользящего контакта обеспечен низкий коэффициент трения за счет выполнения обработки поверхности, такой как покрытие тефлоном (зарегистрированный товарный знак). В частности, коэффициент статического трения поверхности первой канавки 166, предназначенной для обеспечения скользящего контакта, относительно цилиндрической винтовой пружины 160 (первый коэффициент µs1 статического трения) задан меньшим, чем коэффициент статического трения поверхности второй канавки 168, предназначенной для обеспечения скользящего контакта, относительно цилиндрической винтовой пружины 160 (второй коэффициент µs2 статического трения).
Прижимающая сила, с которой цилиндрическая винтовая пружина 160 давит на поверхность первой канавки 166 для обеспечения скользящего контакта, и прижимающая сила, с которой цилиндрическая винтовая пружина 160 давит на поверхность второй канавки 168 для обеспечения скользящего контакта, по существу эквивалентны друг другу. Соответственно, максимальная сила статического трения между цилиндрической винтовой пружиной 160 и поверхность второй канавки 168 для обеспечения скользящего контакта превышают максимальную силу статического трения между цилиндрической винтовой пружиной 160 и поверхностью первой канавки 166 для обеспечения скользящего контакта.
Таким образом, поверхность цилиндрической винтовой пружины 160 и поверхность первой канавки 166 для обеспечения скользящего контакта, которые введены во фрикционное взаимодействие друг с другом, образуют первую пару поверхностей трения, предназначенную для создания первой силы сопротивления посредством силы трения. Поверхность цилиндрической винтовой пружины 160 и поверхность второй канавки 168 для обеспечения скользящего контакта, которые введены во фрикционное взаимодействие друг с другом, образуют вторую пару поверхностей трения, предназначенную для создания второй силы сопротивления посредством силы трения. Вторая канавка 168 для обеспечения скользящего контакта также служит в качестве элемента для обеспечения смещения, который за счет его упругой деформации обеспечивает возможность перемещения второй пары поверхностей трения, имеющей больший коэффициент статического трения, при относительном смещении рычага 52 педали относительно опорного кронштейна 54.
Как будет понятно из вышеприведенного описания, педальное устройство 50 акселератора по четырнадцатому варианту осуществления может быть смоделировано в виде устройства с прямолинейным движением, как показано на фиг.52-54.
Когда при использовании четырнадцатого варианта осуществления водитель прикладывает усилие Fp нажима к рычагу 52 педали, рычаг 52 педали «пытается» повернуться из исходного положения в направлении по часовой стрелке вокруг оси 64, если смотреть на фиг.48, и «пытается» переместиться влево относительно опорного кронштейна 54, если смотреть на фиг.52. Однако цилиндрическая винтовая пружина 166 введена во фрикционное взаимодействие с поверхностями первой и второй канавок 166 и 168 для обеспечения скользящего контакта. Соответственно, когда сила, действующая в направлении вокруг оси 64 на спиральную часть цилиндрической винтовой пружины 160 относительно канавок 166 и 168, предназначенных для обеспечения скользящего контакта, равна максимальной силе статического трения между ними или меньше нее, рычаг 52 педали по существу не поворачивается, если смотреть на фиг.48, и, как показано на фиг.52, не перемещается относительно опорного кронштейна 54.
Когда сила, действующая в направлении вокруг оси 64 на спиральную часть цилиндрической винтовой пружины 160 относительно первой канавки 166, предназначенной для обеспечения скользящего контакта, превысит максимальную силу статического трения между ними, спиральная часть цилиндрической винтовой пружины 160 смещается вокруг оси 64 относительно первой канавки 166 для обеспечения скользящего контакта. Соответственно, рычаг 52 педали поворачивается вокруг оси 64, если смотреть на фиг.48, и, как показано на фиг.53, перемещается влево относительно опорного кронштейна 54.
Однако, поскольку поверхность второй канавки 168 для обеспечения скользящего контакта введена во фрикционное взаимодействие с цилиндрической винтовой пружиной 160, в данной части, предназначенной для обеспечения фрикционного взаимодействия, цилиндрическая винтовая пружина 160 вызывает упругую деформацию вокруг оси 64 части второго элемента 164, предназначенного для обеспечения скользящего контакта, вблизи второй канавки 168 для обеспечения скользящего контакта. Таким образом, в данном состоянии упругими силами, которые «стремятся» вернуть рычаг 52 педали в исходное положение, являются упругая сила, создаваемая цилиндрической винтовой пружиной 160, и упругая сила, связанная с упругой деформацией второго элемента 164 для обеспечения скользящего контакта.
Когда сила, действующая вокруг оси 64 на спиральную часть цилиндрической винтовой пружины 160 относительно второй канавки 168, предназначенной для обеспечения скользящего контакта, превысит максимальную силу статического трения между ними, как показано на фиг.54, спиральная часть цилиндрической винтовой пружины 160 смещается вокруг оси 64 относительно второй канавки 168 для обеспечения скользящего контакта. Соответственно, рычаг 52 педали поворачивается вокруг оси 64, если смотреть на фиг.48, и, как показано на фиг.54, перемещается влево относительно опорного кронштейна 54. Таким образом, поскольку в данном состоянии цилиндрическая винтовая пружина 160 по существу не вызывает упругой деформации второго элемента 164, предназначенного для обеспечения скользящего контакта, упругая сила, которая «стремится» вернуть рычаг 52 педали в исходное положение, представляет собой упругую силу, создаваемую цилиндрической винтовой пружиной 160. Следовательно, динамическая жесткость всей пружины, предназначенной для возврата рычага 52 педали путем его поджима, снижается.
Соответственно, в четырнадцатом варианте осуществления зависимость между усилием F нажима, приложенным к рычагу 52 педали водителем во время увеличения усилия F нажима от 0, и ходом S центра поверхности нажима, образованной на плоской пластинчатой части 52А, также аналогична соответствующей зависимости в вышеописанном первом варианте осуществления, то есть характеристика F-S представляет собой характеристику с двумя перегибами, подобную показанной на фиг.6. Кроме того, в четырнадцатом варианте осуществления по мере увеличения хода S рычага 52 педали сила, с которой цилиндрическая винтовая пружина 160 давит на поверхности канавок 166 и 168 для обеспечения скользящего контакта, выполненных в соответствующих элементах 162 и 164 для обеспечения скользящего контакта, постепенно увеличивается, так что силы трения между цилиндрической винтовой пружиной 160 и поверхностями канавок 166 и 168 для обеспечения скользящего контакта постепенно увеличиваются. Таким образом, характеристическая кривая F-S в процессе увеличения и уменьшения усилия нажима, приложенного к рычагу 52 педали, повторяет кривую гистерезиса, как показано на фиг.17.
Таким образом, четырнадцатый вариант осуществления функционирует аналогично вышеописанному шестому варианту осуществления за исключением того, что элементы 162 и 164, предназначенные для обеспечения скользящего контакта, находятся в скользящем контакте с цилиндрической винтовой пружиной 160 сжатия, что обеспечивает их упругое деформирование в направление вдоль окружности под действием цилиндрической винтовой пружины 160 сжатия. Следовательно, четырнадцатый вариант осуществления может обеспечить действия и эффекты, аналогичные действиям и эффектам, которые обеспечиваются вышеописанным шестым вариантом осуществления, посредством использования цилиндрической винтовой пружины сжатия в качестве единственного возвратного поджимающего средства, а также использования двух элементов для обеспечения скользящего контакта, находящихся в скользящем контакте с цилиндрической винтовой пружиной сжатия.
В соответствии с вышеописанным данным вариантом осуществления первый элемент 162 для обеспечения скользящего контакта и второй элемент 164 для обеспечения скользящего контакта представляют собой изолированные друг от друга элементы, образованные из разных материалов. Однако, как показано на фиг.50 и 51, первый элемент для обеспечения скользящего контакта и второй элемент для обеспечения скользящего контакта могут быть образованы в качестве одного элемента 170 для обеспечения скользящего контакта. Элемент 170 для обеспечения скользящего контакта принимает форму, аналогичную форме элемента 110 для обеспечения скользящего контакта по вышеописанному восьмому варианту осуществления, однако канавки 166 и 168 для обеспечения скользящего контакта разнесены друг от друга посредством центральной разделительной канавки 172. Кроме того, хотя это не проиллюстрировано, канавка 168 для обеспечения скользящего контакта имеет неровности, образованные на ее поверхности, такие как прорези, проходящие в направлении вдоль окружности. Данная конфигурация обеспечивает возможность уменьшения числа компонентов по сравнению со случаем вышеописанного четырнадцатого варианта осуществления.
Пятнадцатый вариант осуществления изобретения
Фиг.55 представляет собой вид сбоку, показывающий пятнадцатый вариант осуществления исполнительного устройства с педальным управлением в соответствии с настоящим изобретением, при этом устройство выполнено в виде педального устройства акселератора автомобиля типа устройства с электрическим управлением системой привода. Фиг.56 представляет собой вид сзади, показывающий пятнадцатый вариант осуществления.
В пятнадцатом варианте осуществления пластинчатая пружина 178, которая служит в качестве возвратного поджимающего средства, расположена с задней стороны плоской пластинчатой части 52А рычага 52 педали. Пластинчатая пружина 178 имеет основной элемент 178А пластинчатой пружины, имеющий большую степень кривизны, и вспомогательный элемент 178В пластинчатой пружины, имеющий малую степень кривизны. Основной элемент 178А пластинчатой пружины расположен со стороны плоской пластинчатой части 52А рычага 52 педали относительно вспомогательного элемента 178В пластинчатой пружины. Основная часть 178А пластинчатой пружины и вспомогательная часть 178В пластинчатой пружины соединены вместе на их нижних концах и опираются на осевой стержень 62 с возможностью поворота. Основной элемент 178А пружины и вспомогательный элемент 178В пластинчатой пружины изогнуты в их центральных частях в направлении от плоской пластинчатой части 52А, и вспомогательный элемент 178В пластинчатой пружины находится в контакте с наклонной частью кузова В транспортного средства.
Элемент 180 для обеспечения скользящего контакта, который образован из смолы и служит в качестве средства для создания второй силы сопротивления, закреплен на задней поверхности плоской пластинчатой части 52А рычага 52 педали. Верхняя концевая часть основного элемента 178А пластинчатой пружины введена во фрикционное взаимодействие с элементом 180 для обеспечения скользящего контакта. Верхняя концевая часть вспомогательного элемента 178В пластинчатой пружины введена во фрикционное взаимодействие с наружной поверхностью основного элемента 178А пластинчатой пружины вблизи верхнего конца основной части 178А пластинчатой пружины. Соответственно, вспомогательный элемент 178В пластинчатой пружины служит в качестве средства для создания первой силы сопротивления.
Принимая во внимание упругие деформации вспомогательного элемента 178В пластинчатой пружины и элемента 180 для обеспечения скользящего контакта вдоль продольного направления плоской пластинчатой части 52А рычага 52 педали, модуль K1 упругости материала, используемого для образования вспомогательного элемента 178В пластинчатой пружины, устанавливают сравнительно высоким, а модуль K2 упругости смолы, используемой для образования элемента 180 для обеспечения скользящего контакта, устанавливают меньшим, чем модуль K1 упругости смолы, используемой для образования вспомогательного элемента 178В пластинчатой пружины.
Для поверхности элемента 180 для обеспечения скользящего контакта, который введен во фрикционное взаимодействие с основным элементом 178А пластинчатой пружины, и поверхностей верхних концевых частей основного и вспомогательного элементов 178А и 178В пластинчатой пружины, которые введены во фрикционное взаимодействие друг с другом, обеспечен низкий коэффициент трения за счет выполнения обработки поверхности, такой как покрытие тефлоном (зарегистрированный товарный знак). В частности, коэффициент статического трения поверхности элемента 180, предназначенного для обеспечения скользящего контакта, относительно основного элемента 178А пластинчатой пружины (первый коэффициент µs1 статического трения) задан меньшим, чем коэффициент статического трения поверхности вспомогательного элемента 178В пластинчатой пружины относительно основного элемента 178А пластинчатой пружины (второй коэффициент µs2 статического трения).
Прижимающая сила, с которой вспомогательный элемент 178В пластинчатой пружины прижимает основной элемент 178А пластинчатой пружины, и прижимающая сила, с которой основной элемент 178А пластинчатой пружины прижимает элемент 180 для обеспечения скользящего контакта, по существу эквивалентны друг другу. Соответственно, максимальная сила статического трения между основным элементом 178А пластинчатой пружины и элементом 180 для обеспечения скользящего контакта превышает максимальную силу статического трения между вспомогательным элементом 178В пластинчатой пружины и основным элементом 178А пластинчатой пружины.
Таким образом, поверхность вспомогательного элемента 178В пластинчатой пружины и поверхность основного элемента 178А пластинчатой пружины, которые введены во фрикционное взаимодействие друг с другом, образуют первую пару поверхностей трения, предназначенную для создания первой силы сопротивления посредством силы трения. Поверхность основного элемента 178А пластинчатой пружины и поверхность элемента 180 для обеспечения скользящего контакта, которые введены во фрикционное взаимодействие друг с другом, образуют вторую пару поверхностей трения, предназначенную для создания второй силы сопротивления посредством силы трения. Элемент 180 для обеспечения скользящего контакта также служит в качестве элемента для обеспечения смещения, который за счет его упругой деформации обеспечивает возможность перемещения второй пары поверхностей трения, имеющей больший коэффициент статического трения, вместе с относительным смещением рычага 52 педали относительно опорного кронштейна 54.
По мере увеличения угла поворота рычага 52 педали из исходного положения в результате нажатия на рычаг 52 педали упругие силы, создаваемые основным элементом 178А пластинчатой пружины и вспомогательным элементом 178В пластинчатой пружины, постепенно увеличиваются. Соответственно, по мере увеличения угла поворота рычага 52 педали из исходного положения сила, с которой основной элемент 178А пластинчатой пружины прижимает элемент 180 для обеспечения скользящего контакта, и сила, с которой вспомогательный элемент 178В пластинчатой пружины прижимает основной элемент 178А пластинчатой пружины, постепенно увеличиваются; таким образом, сила трения между основным элементом 178А пластинчатой пружины и элементом 180 для обеспечения скользящего контакта и сила трения между вспомогательным элементом 178В пластинчатой пружины и основным элементом 178А пластинчатой пружины постепенно увеличиваются.
Таким образом, пятнадцатый вариант осуществления функционирует аналогично вышеописанному четырнадцатому варианту осуществления за исключением того, что упругая сила, создаваемая пластинчатой пружиной 178, действует непосредственно на элемент 180 для обеспечения скользящего контакта, и того, что дистальная концевая часть основного элемента 178А пластинчатой пружины вызывает деформацию сдвига элемента 180 для обеспечения скользящего контакта. Следовательно, пятнадцатый вариант осуществления может обеспечить действия и эффекты, аналогичные действиям и эффектам вышеописанного четырнадцатого варианта осуществления, за счет использования пластинчатой пружины в качестве возвратного поджимающего средства.
В частности, в соответствии с пятнадцатым вариантом осуществления скорость увеличения силы, с которой вспомогательный элемент 178В пластинчатой пружины прижимает основной элемент 178А пластинчатой пружины, и силы, с которой основной элемент 178А пластинчатой пружины прижимает элемент 180 для обеспечения скользящего контакта, при увеличении угла поворота рычага 52 педали из исходного положения выше, чем соответствующая скорость в вышеописанном четырнадцатом варианте осуществления. Следовательно, характеристическая кривая F-S в пятнадцатом варианте осуществления повторяет кривую гистерезиса, подобную показанной на фиг.35.
В соответствии с четырнадцатым и пятнадцатым вариантами осуществления достаточно одного возвратного поджимающего средства. Таким образом, по сравнению с конфигурациями по вышеописанным первому-тринадцатому вариантам осуществления число требуемых компонентов может быть уменьшено, так что конструкция исполнительного устройства с педальным управлением может быть упрощена.
В соответствии с четырнадцатым и пятнадцатым вариантами осуществления аналогично вышеописанным шестому-тринадцатому вариантам осуществления отсутствует необходимость в размещении упругого элемента, такого как прокладка, в зоне, в которой опорный кронштейн 54 обеспечивает опору для рычага 52 педали с возможностью его поворота. Таким образом, по сравнению с вышеописанными первым-пятым вариантами осуществления опорный кронштейн 54 может обеспечить опору для рычага 52 педали с возможностью его поворота в хорошем состоянии без люфта и могут быть уменьшены колебания характеристики F-S, вызванные «рычажным» воздействием рычага 52 педали на опорный кронштейн 54.
Несмотря на то, что настоящее изобретение было подробно описано со ссылкой на вышеприведенный конкретный вариант осуществления, для специалистов в данной области техники будет очевидно, что настоящее изобретение не ограничено данным вариантом осуществления и оно может быть реализовано в различных других формах без отхода от объема изобретения.
Например, в вышеописанных шестом-тринадцатом вариантах осуществления возвратное поджимающее средство имеет первое и второе возвратные поджимающие средства, а средства для создания первой и второй сил сопротивления находятся в скользящем контакте соответственно с первым и вторым возвратными поджимающими средствами. Однако, помимо первого и второго возвратных поджимающих средств, может быть предусмотрено вспомогательное возвратное поджимающее средство, которое не находится в скользящем контакте с первым и вторым возвратными поджимающими средствами. Аналогичным образом, в вышеописанных четырнадцатом и пятнадцатом вариантах осуществления, помимо возвратного поджимающего средства, находящегося в скользящем контакте со средствами для создания первой и второй сил сопротивления, может быть предусмотрено вспомогательное возвратное поджимающее средство.
В вышеописанных первом-пятнадцатом вариантах осуществления по мере увеличения воздействующей силы, приложенной к рычагу 12 или 52 педали, прижимающая сила между элементами первой и второй частей для обеспечения трения скольжения, находящимися во фрикционном скользящем контакте друг с другом, увеличивается. Однако по мере увеличения воздействующей силы, приложенной к рычагу 12 или 52 педали, может увеличиться только прижимающая сила между элементами второй части для обеспечения трения скольжения, находящимися во фрикционном скользящем контакте друг с другом.
В вышеописанных шестом-пятнадцатом вариантах осуществления посредством того, что коэффициент статического трения средства, предназначенного для создания первой силы сопротивления, относительно возвратного поджимающего средства (первый коэффициент µs1 статического трения) задан меньшим, чем коэффициент статического трения средства, предназначенного для создания второй силы сопротивления, относительно возвратного поджимающего средства (второй коэффициент µs2 статического трения), будет обеспечено то, что максимальная сила статического трения между возвратным поджимающим средством и средством для создания первой силы сопротивления будет меньше, чем максимальная сила статического трения между возвратным поджимающим средством и коэффициентом статического трения средства для создания второй силы сопротивления. Тем не менее, любое средство может быть использовано при условии, что максимальная сила статического трения между возвратным поджимающим средством и средством для создания первой силы сопротивления будет меньше максимальной силы статического трения между возвратным поджимающим средством и коэффициентом статического трения средства для создания второй силы сопротивления. Следовательно, например, первый коэффициент µs1 статического трения может быть задан равным второму коэффициенту µs2 статического трения или превышающим второй коэффициент µs2 статического трения, в результате чего будет обеспечено то, что прижимающая сила между возвратным поджимающим средством и средством для создания первой силы сопротивления будет меньше прижимающей силы между возвратным поджимающим средством и коэффициентом статического трения средства для создания второй силы сопротивления.
В вышеописанных шестом-пятнадцатом вариантах осуществления средства для создания первой и второй сил сопротивления находятся в скользящем контакте соответственно с первым и вторым возвратными поджимающими средствами. Однако данные варианты осуществления могут быть модифицированы, как показано на фиг.57, которая показывает пример модификации модели, показанной на фиг.21-23. В частности, данные варианты осуществления могут быть модифицированы следующим образом: первое возвратное поджимающее средство 56 и второе возвратное поджимающее средство 58 предусмотрены с соответствующими частями 56А и 58А, труднее поддающимися упругой деформации, которые по существу не подвергаются упругой деформации в направлении возврата путем поджима, и средство 70А для создания первой силы сопротивления и средство 70В для создания второй силы сопротивления находятся в скользящем контакте с соответствующими частями 56А и 58А, труднее поддающимися упругой деформации, и при этом не находятся в скользящем контакте с соответствующими частями, легко поддающимися упругой деформации.
Аналогичным образом, в вышеописанных четырнадцатом и пятнадцатом вариантах осуществления средства для создания первой и второй сил сопротивления находятся в скользящем контакте с одним возвратным поджимающим средством. Однако данные варианты осуществления могут быть модифицированы, как показано на фиг.58, которая показывает пример модификации модели, показанной на фиг.52-54. В частности, данные варианты осуществления могут быть модифицированы следующим образом: возвратное поджимающее средство 160 предусмотрено с частью 160А, труднее поддающейся упругой деформации, которая по существу не подвергается упругой деформации в направлении возврата путем поджима, и средство 70А для создания первой силы сопротивления и средство 70В для создания второй силы сопротивления находятся в скользящем контакте с соответствующими разными зонами части 160А, труднее поддающейся упругой деформации, и при этом не находится в скользящем контакте с соответствующими частями, легко поддающимися упругой деформации.
В вышеописанных вариантах осуществления за исключением тринадцатого и пятнадцатого вариантов осуществления средства для создания первой и второй сил сопротивления имеют аналогичные конструктивные элементы для обеспечения скользящего контакта. Тем не менее, поскольку средства для создания первой и второй сил сопротивления могут иметь разные конструктивные элементы для обеспечения скользящего контакта, средство для создания первой силы сопротивления по определенному варианту осуществления и средство для создания второй силы сопротивления по другому варианту осуществления могут быть скомбинированы.
В исполнительных устройствах с педальным управлением по вышеописанным вариантам осуществления характеристика зависимости входного воздействия на приводной элемент от относительного смещения приводного элемента представляет собой характеристику с двумя перегибами. Однако исполнительное устройство по настоящему изобретению может иметь характеристику с тремя или более перегибами, имеющую три или более точек перегиба.
В вышеописанных вариантах осуществления характеристика с двумя перегибами, характеризующая процесс увеличения относительного смещения рычага 12 педали, и характеристика с двумя перегибами, характеризующая процесс уменьшения относительного смещения рычага 12 педали, аналогичны за исключением того, что угол наклона графика зависимости между входным воздействием и относительным смещением приводного элемента во время увеличения и угол наклона графика зависимости между входным воздействием и относительным смещением приводного элемента во время уменьшения противоположны по знаку по отношению друг к другу. Однако, например, характеристика во время увеличения относительного смещения и характеристика во время уменьшения относительного смещения могут быть заданы отличающимися друг от друга посредством придания анизотропии при обработке поверхностей трения или использования разных поверхностей трения во время увеличения относительного смещения и во время уменьшения относительного смещения.
В вышеописанных вариантах осуществления относительное смещение приводного элемента имеет вид поворота или прямолинейного движения, но может иметь вид вращения. Может быть предусмотрен ограничитель для предотвращения дальнейшего относительного смещения приводного элемента, когда входное воздействие на приводной элемент становится равным базовой величине или превышает ее.
В вышеописанных вариантах осуществления обеспечивается коэффициент трения между двумя поверхностями трения, который различается у пар поверхностей трения, посредством использования разных обработок поверхностей прокладок или тому подобного. Тем не менее, коэффициент трения между двумя поверхностями трения может быть обеспечен разным у пар поверхностей трения посредством использования разных наполнителей для материалов, используемых для образования поверхностей трения, или посредством использования разных зон контакта в том случае, когда фрикционные материалы подвергаются одинаковой обработке поверхности.
Вышеописанные варианты осуществления обеспечивают получение вышеупомянутой характеристики с двумя перегибами посредством первой и второй пар поверхностей трения, а также элемента для обеспечения смещения, который за счет его упругой деформации обеспечивает возможность перемещения второй пары поверхностей трения совместно с относительным смещением рычага 12 педали относительно опорного корпуса 14. Однако исполнительное устройство по настоящему изобретению может обеспечить получение вышеупомянутой характеристики с двумя перегибами посредством использования регулируемого усилия.
Например, прижимающая сила, с которой фрикционный элемент из пары поверхностей трения прижимает другой фрикционный элемент, может регулироваться посредством использования электромагнитной силы, и сила сопротивления относительному смещению приводного элемента может быть создана посредством использования электромагнитной силы без использования пар поверхностей трения. Кроме того, по меньшей мере, одна из первой и второй пар поверхностей трения может быть заменена устройством для создания силы сопротивления, в котором используется пьезоэлектрический элемент. Примеры данных модификаций могут быть выполнены со следующими конфигурациями: определяется относительное смещение приводного элемента и в зависимости от определенного относительного смещения регулирование прижимающей силы осуществляется таким образом, чтобы обеспечить получение вышеупомянутой характеристики с несколькими перегибами.
В вышеописанных вариантах осуществления фрикционный элемент, который образует одну поверхность трения из второй пары поверхностей трения, образует одно целое с элементом для обеспечения смещения, который за счет его упругой деформации обеспечивает возможность перемещения второй пары поверхностей трения совместно с относительным смещением рычага 12 педали относительно опорного корпуса 14, то есть фрикционный элемент и элемент для обеспечения смещения выполнены в виде одного элемента, такого как вторая прокладка 32В. Тем не менее, фрикционный элемент, который образует одну поверхность трения из второй пары поверхностей трения, и элемент для обеспечения смещения могут быть образованы в виде отдельных элементов. В вышеописанном варианте осуществления возвратное поджимающее средство действует с возвращающей поджимающей силой на рычаг 12 педали посредством упругой силы. Тем не менее, возвращающая поджимающая сила может действовать на приводной элемент посредством магнитной силы постоянного магнита или электромагнитной силы.
В вышеописанных вариантах осуществления исполнительное устройство с педальным управлением представляет собой педальное устройство акселератора типа устройства с электрическим управлением системой привода. Однако исполнительное устройство по настоящему изобретению может быть выполнено с конфигурацией, подобной конфигурации других выполненных с педальным управлением, исполнительных устройств транспортного средства, такого как автомобиль, например тормозного педального устройства типа устройства с электрическим управлением тормозной системой, педального устройства акселератора с электрическим управлением и тормозного педального устройства, соединенного с главным цилиндром. В данном случае средство обнаружения, предназначенное для определения величины воздействия водителя на приводной элемент, может быть устранено. Конфигурация, аналогичная конфигурации исполнительного устройства с педальным управлением по каждому из вышеописанных вариантов осуществления, может быть применена для исполнительного устройства с ручным управлением в транспортном средстве, таком как автомобиль. В частности, в том случае, когда исполнительное устройство по настоящему изобретению применяется для тормозного педального устройства при одновременном гарантировании ощущения нажатия на начальной стадии нажатия, может быть ограничено ненужное создание усилия торможения, в результате чего облегчается регулирование усилия торможения в тот момент, когда усилие торможения начинает становиться эффективным. Кроме того, может быть обеспечена стабилизация тормозного усилия при плавном нажатии на тормозную педаль. В ситуации, требующей большого усилия торможения, требуемое усилие торможения может быть обеспечено посредством сильного нажима на тормозную педаль.
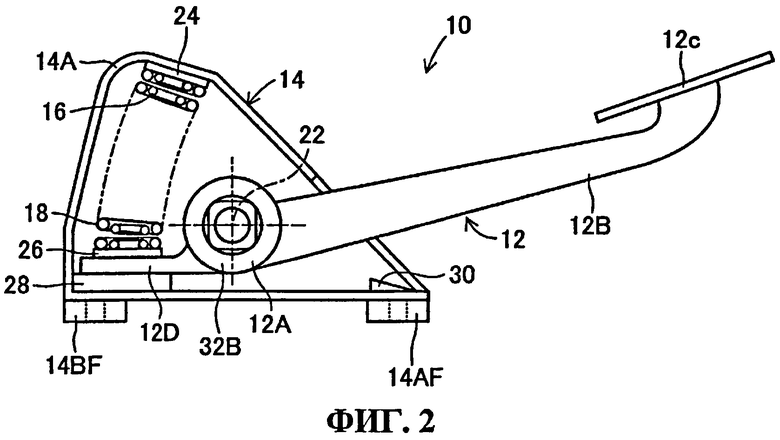
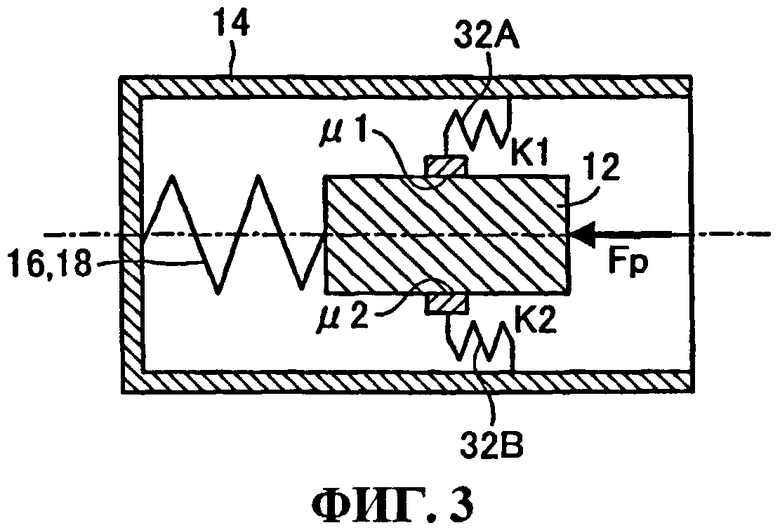
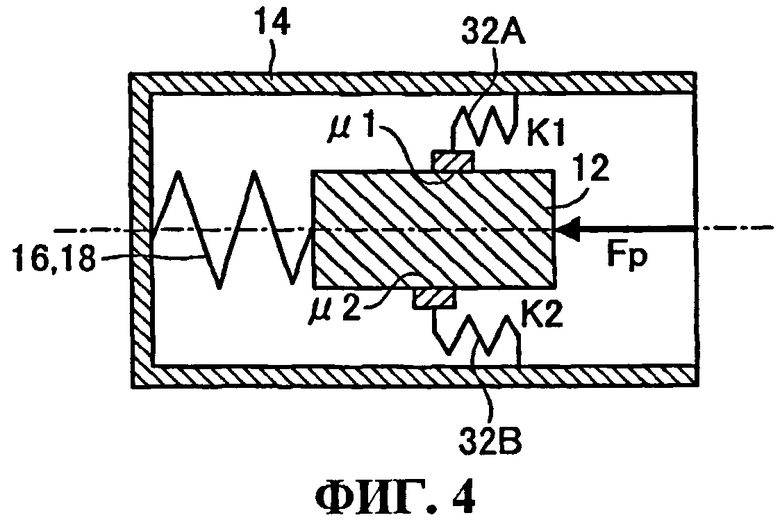
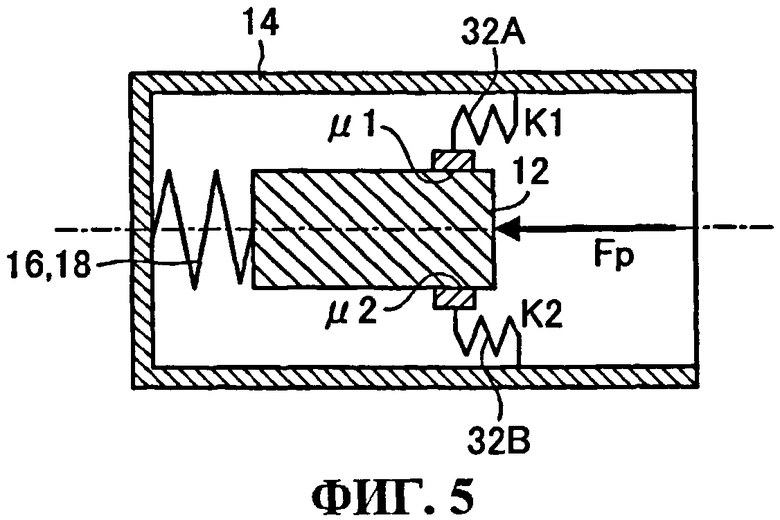
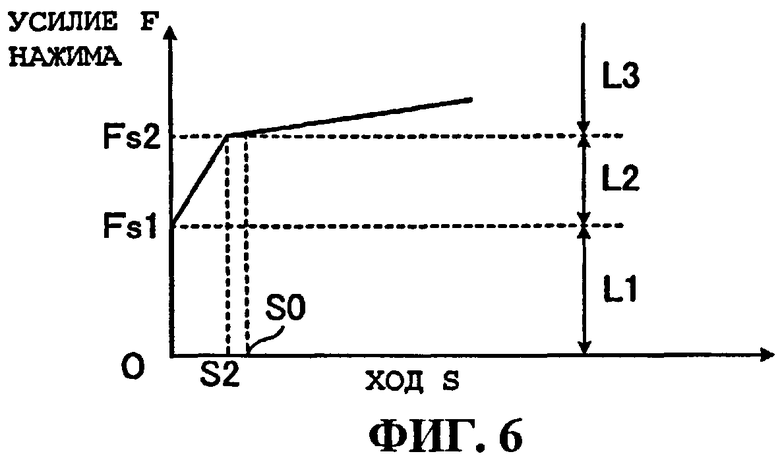
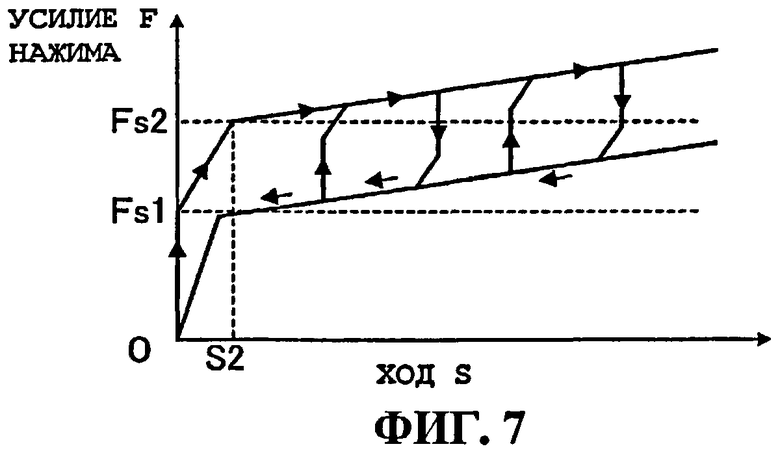
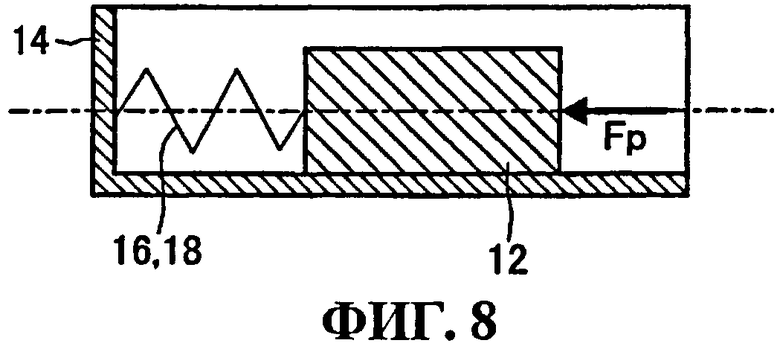
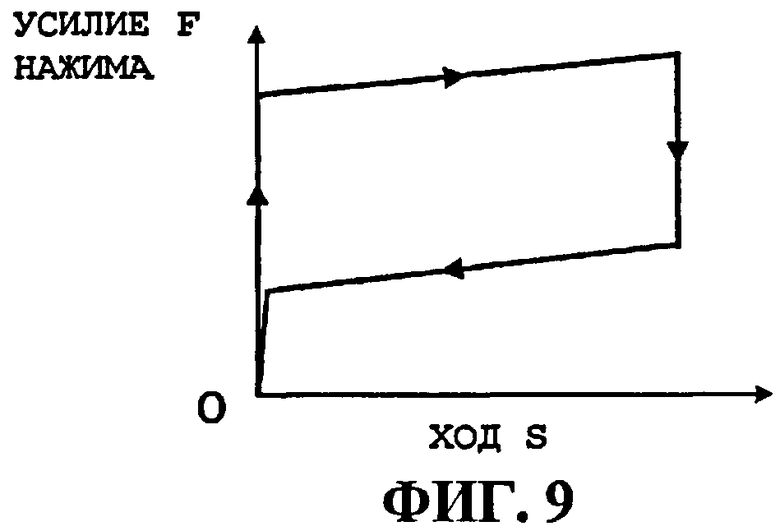
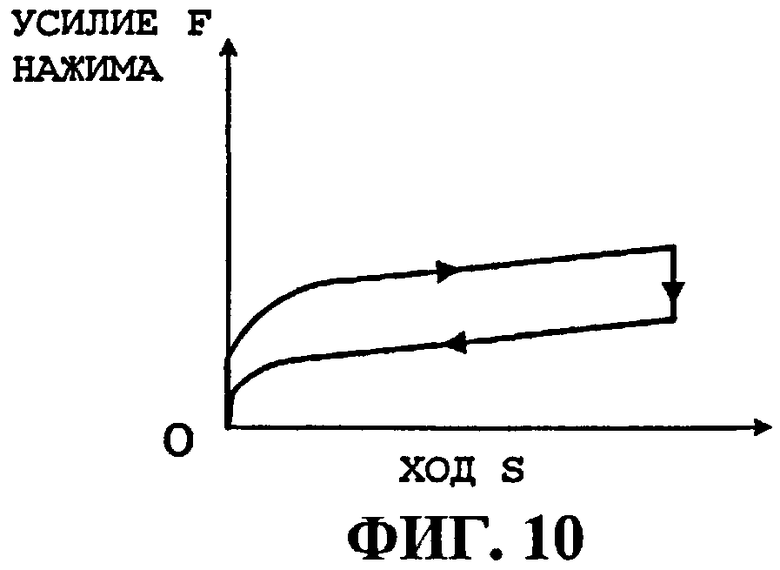
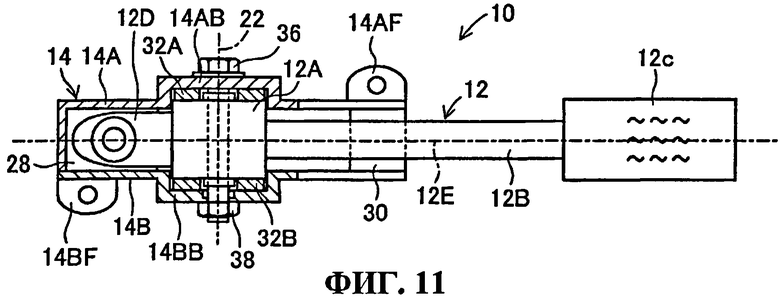
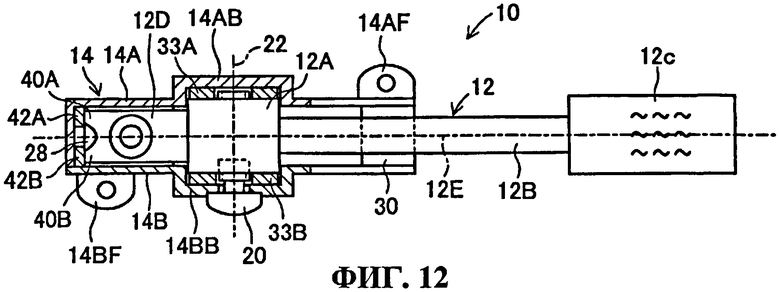
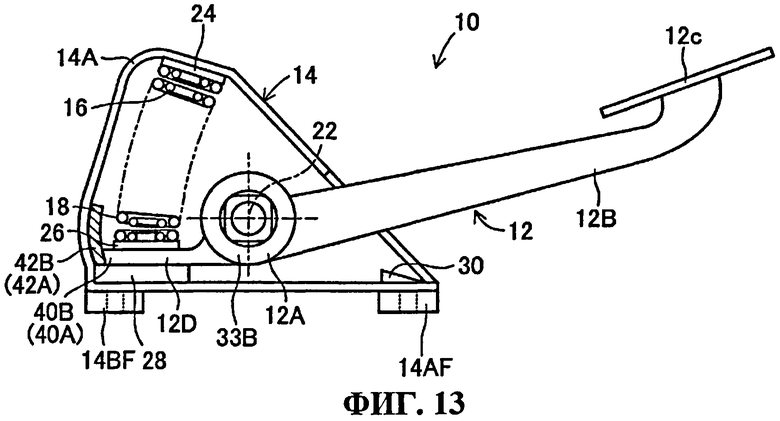
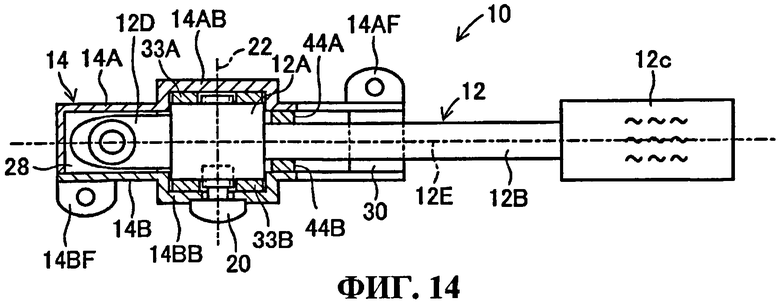
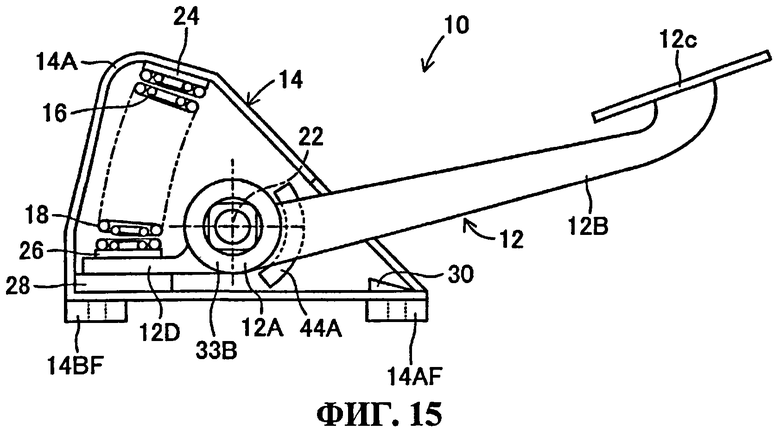
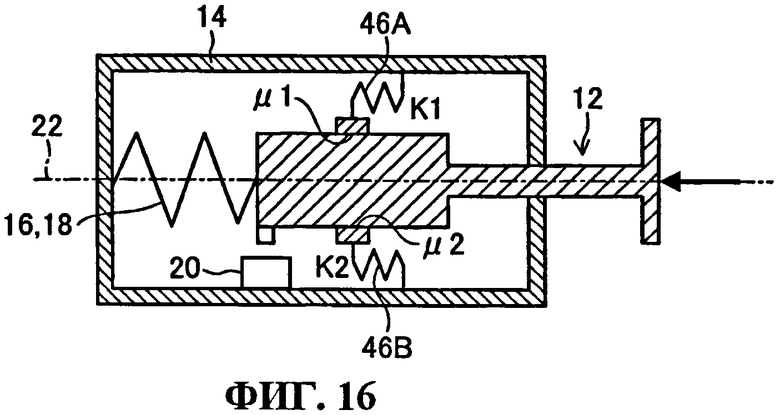
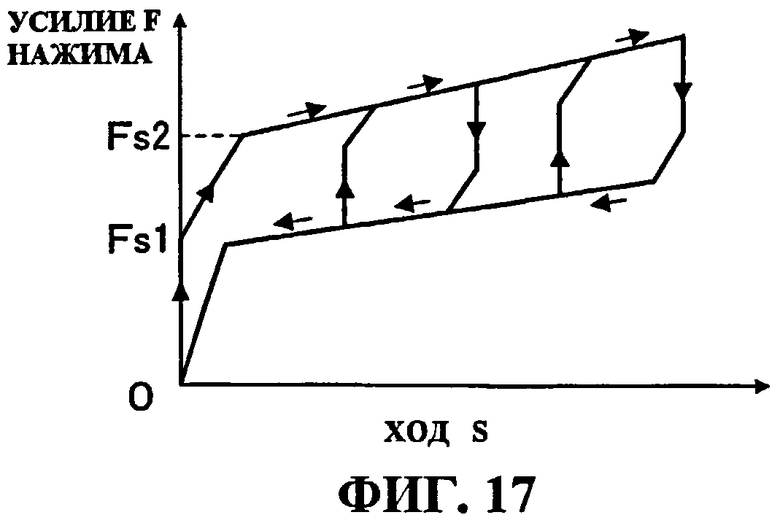
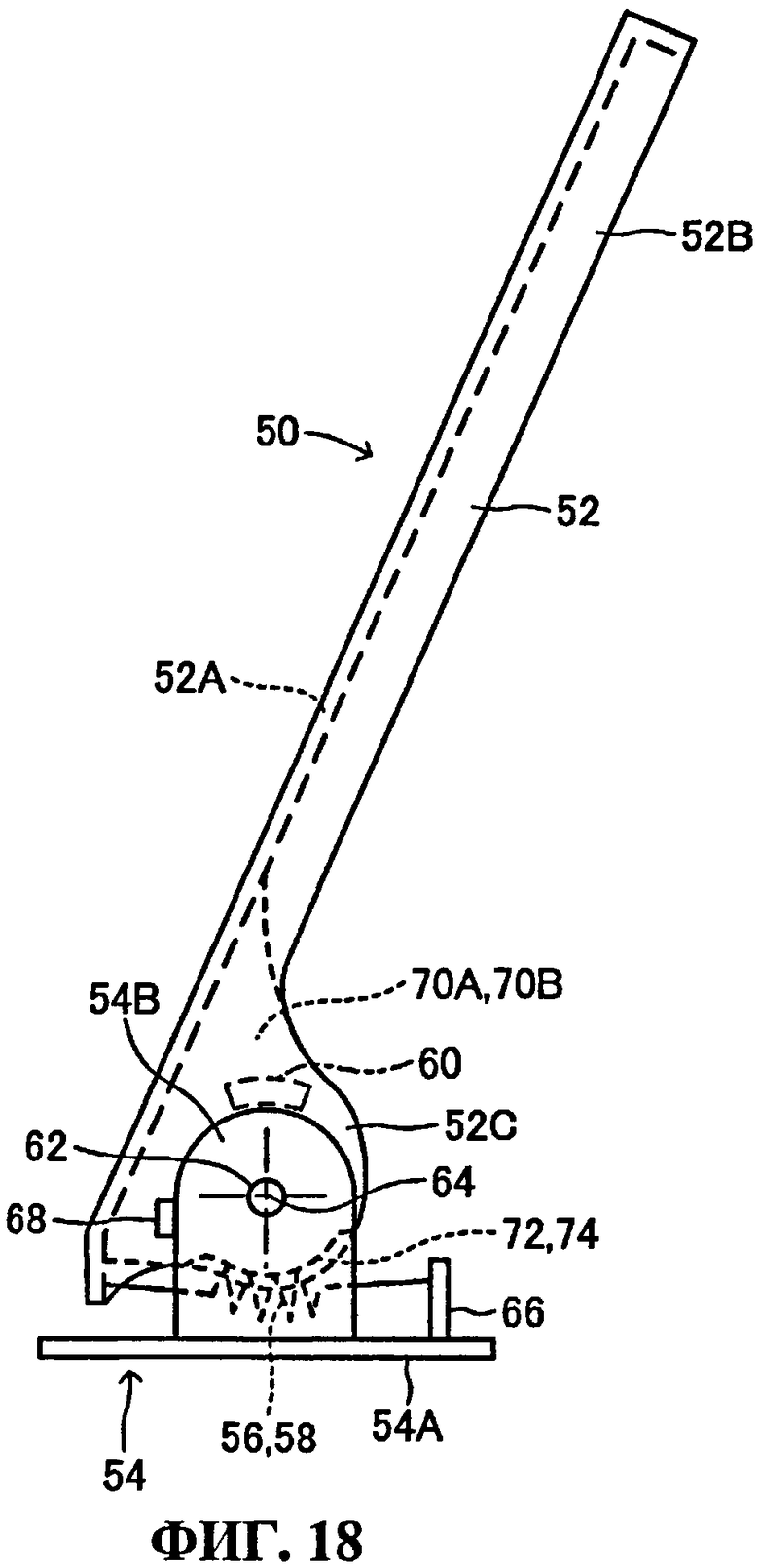
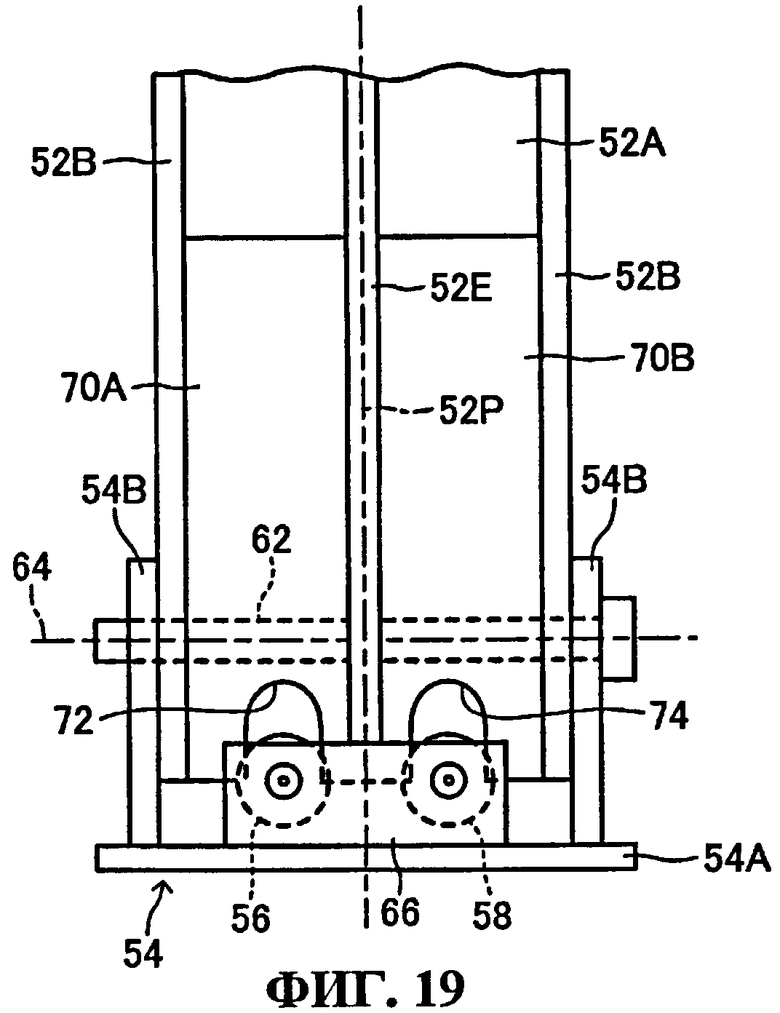
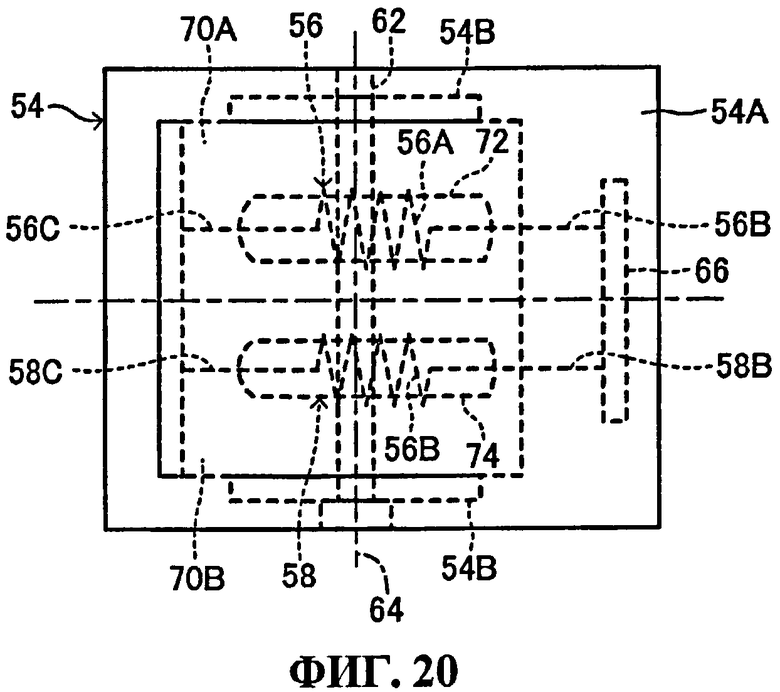
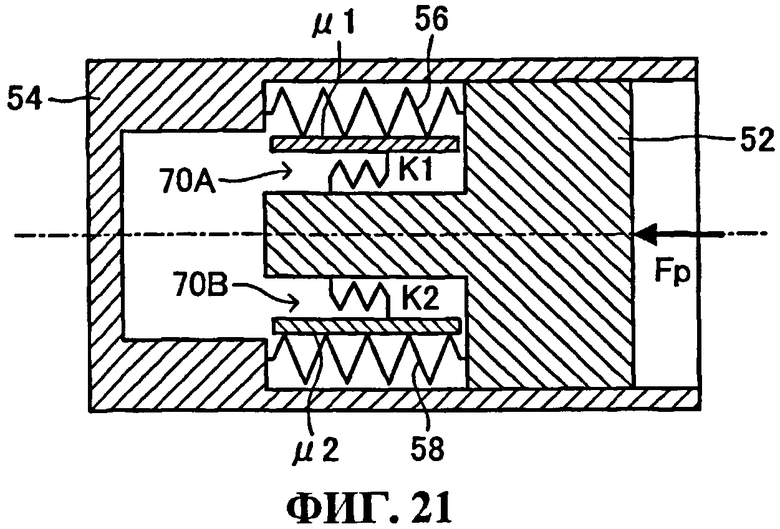
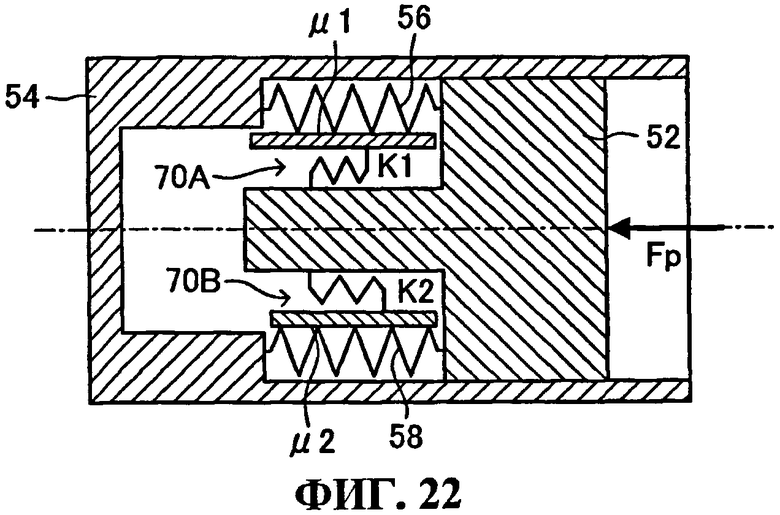
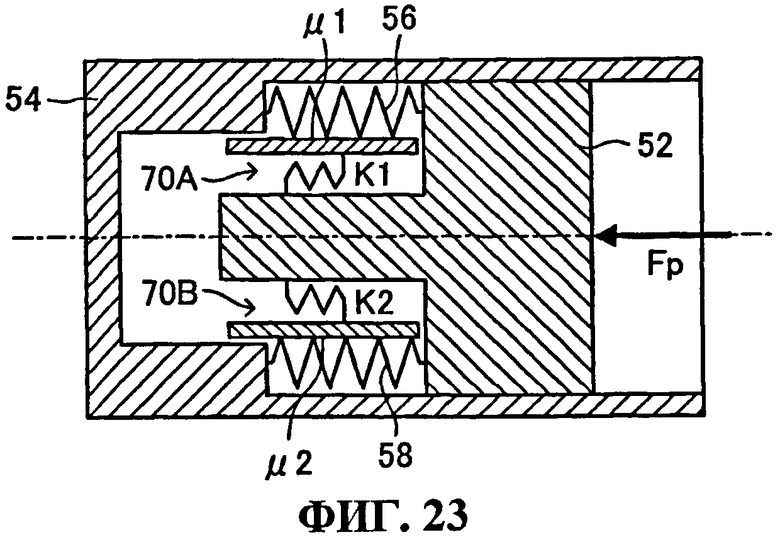
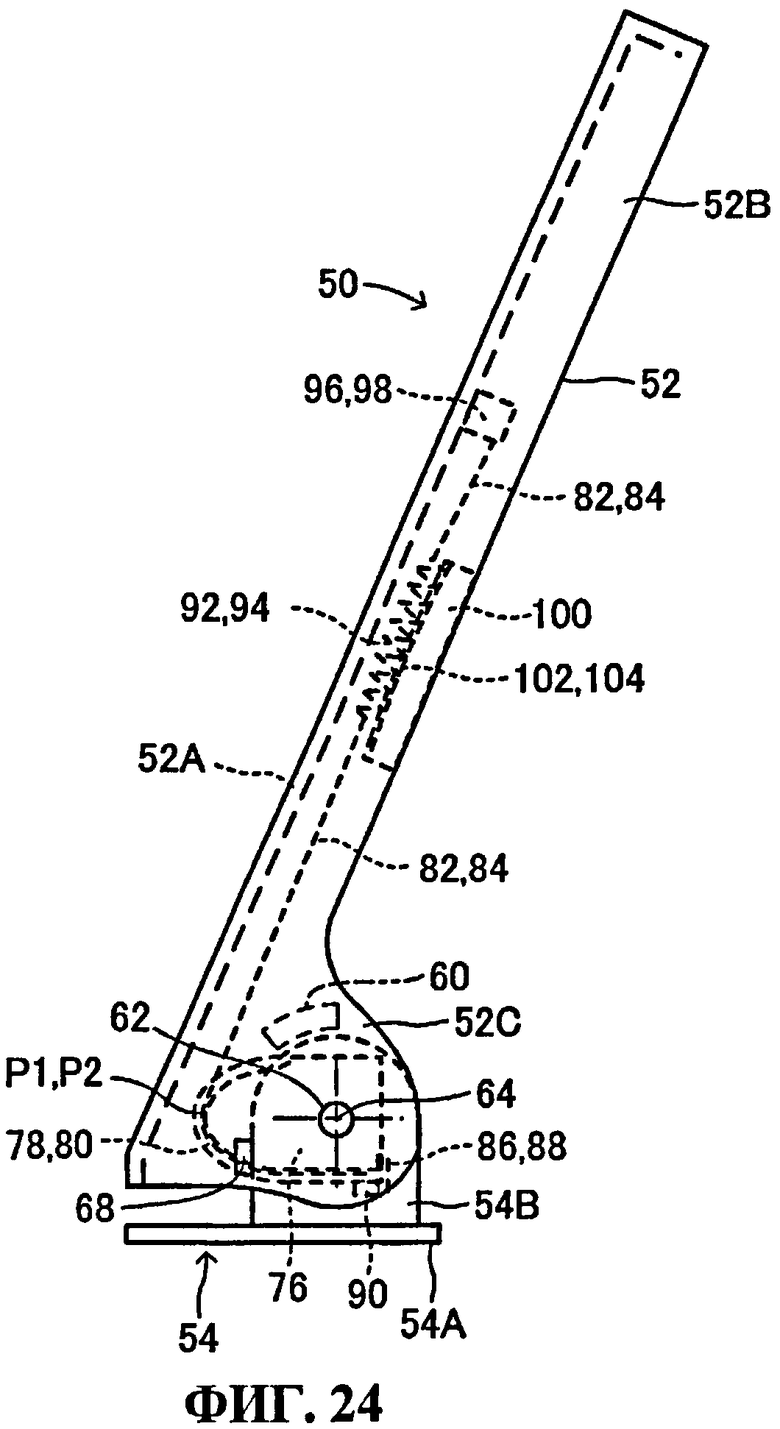
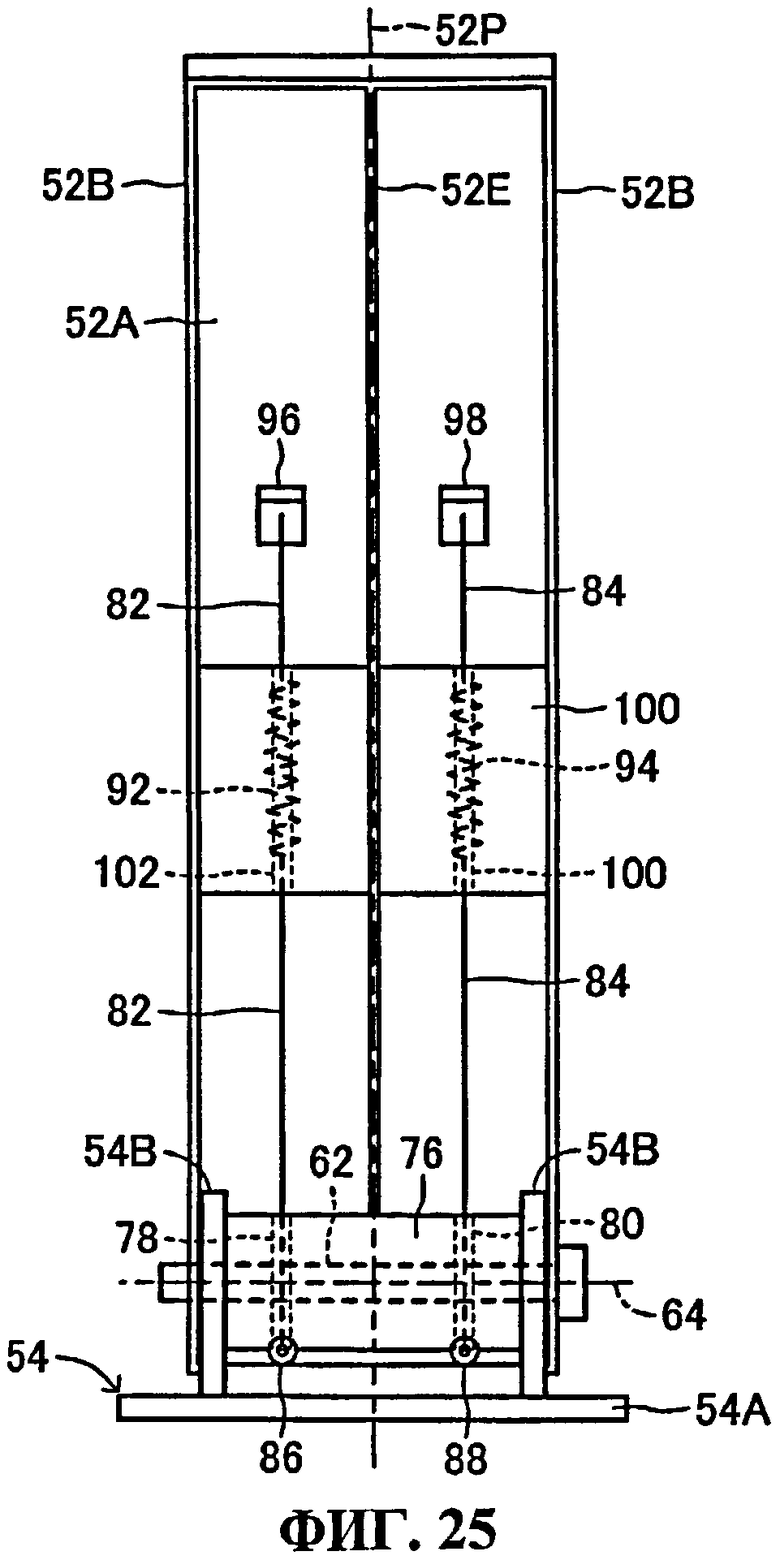
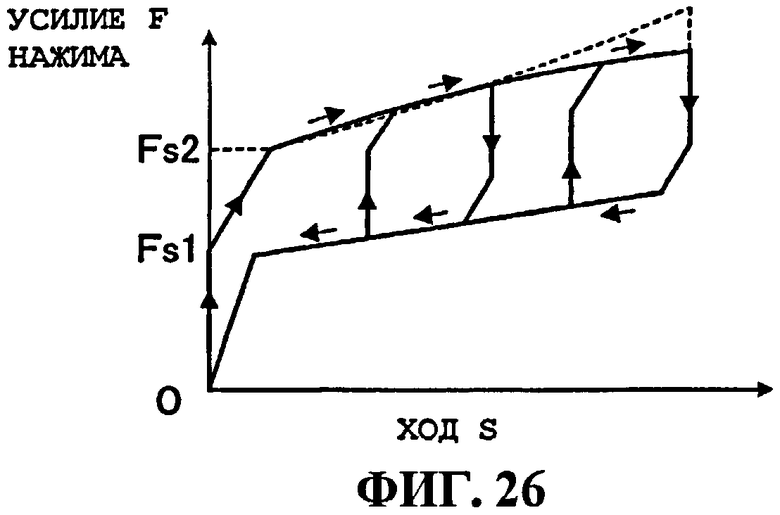
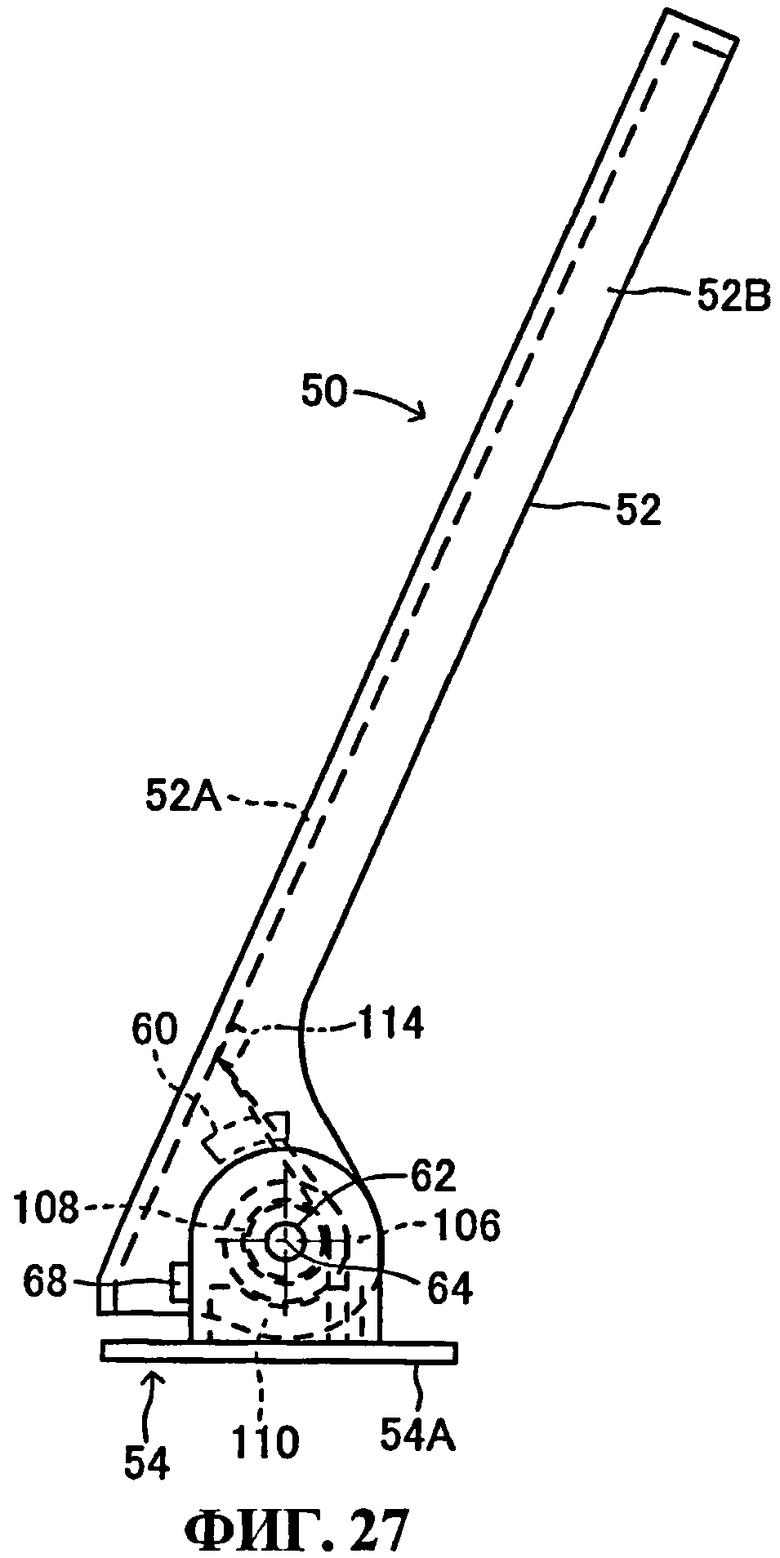
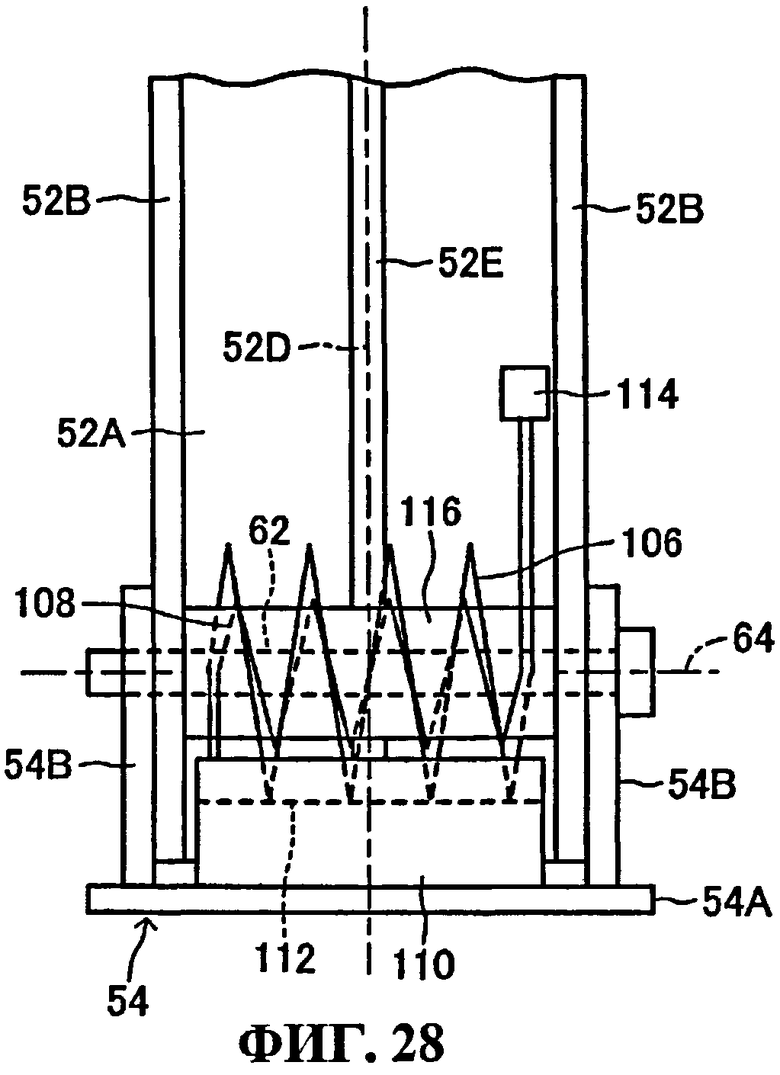
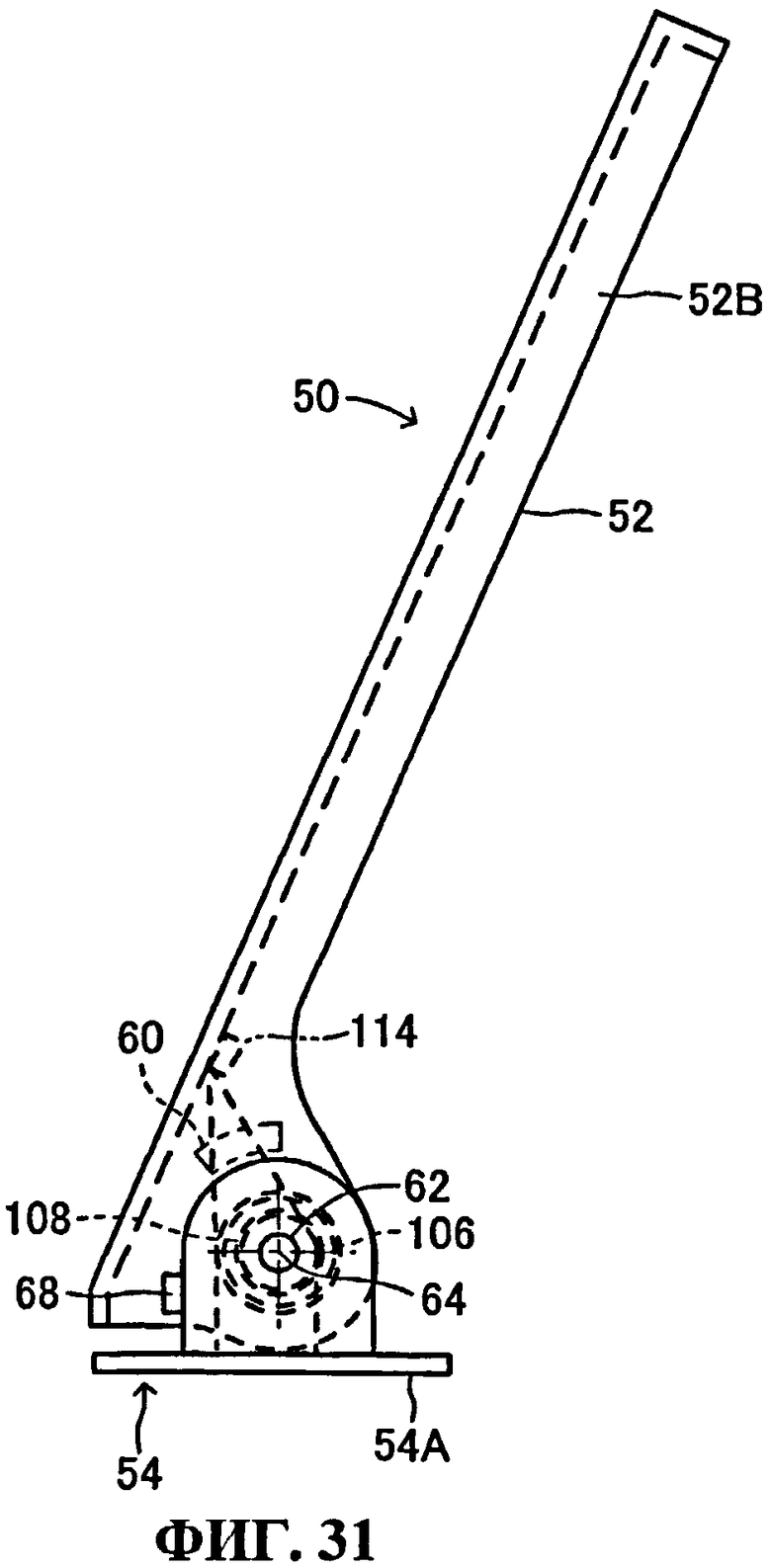
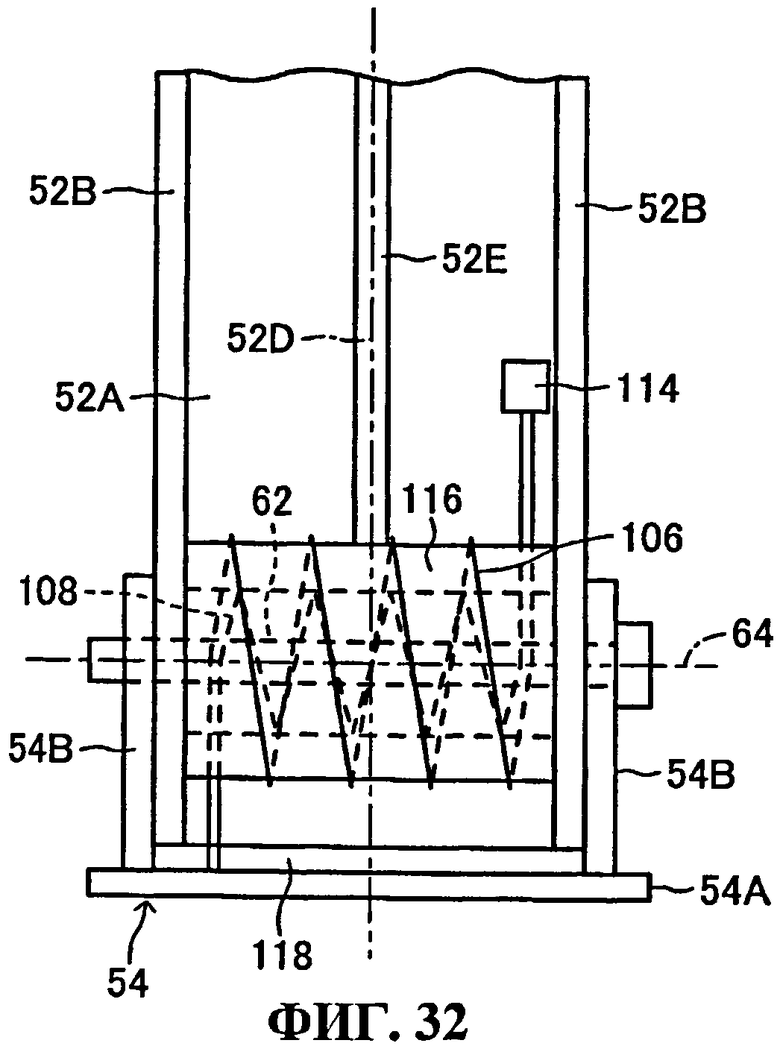
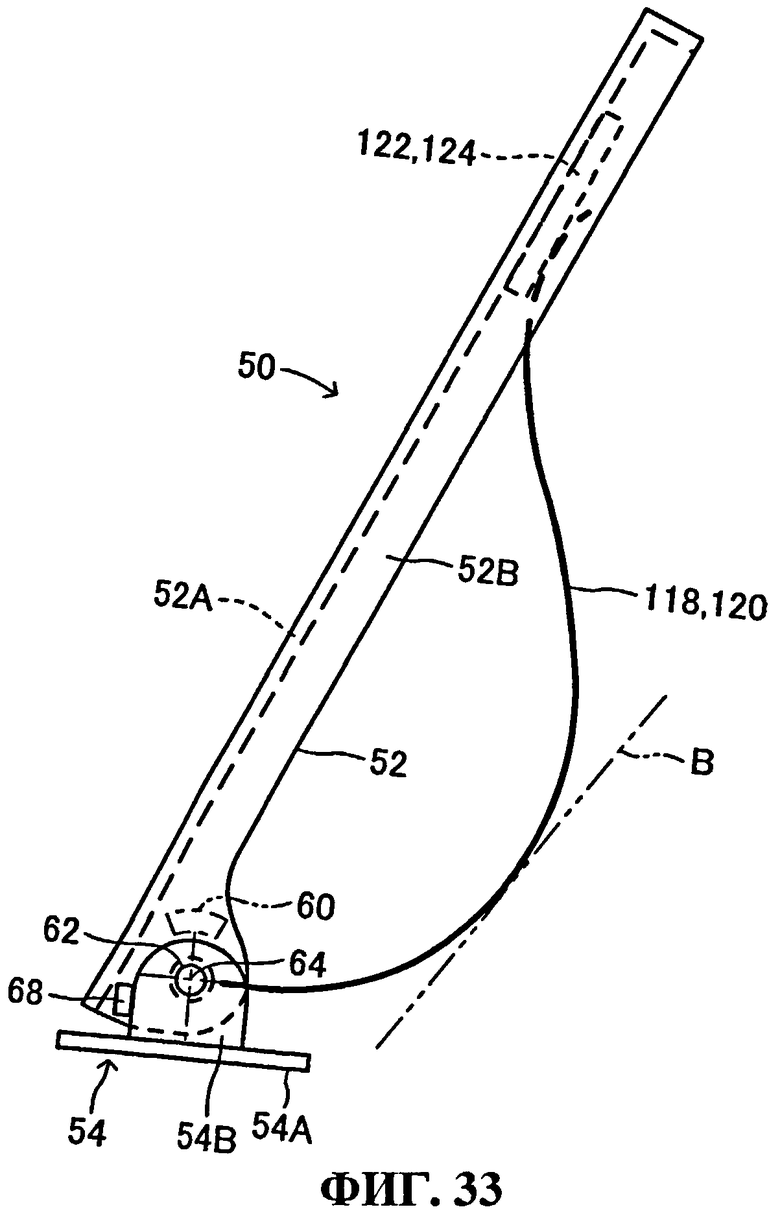
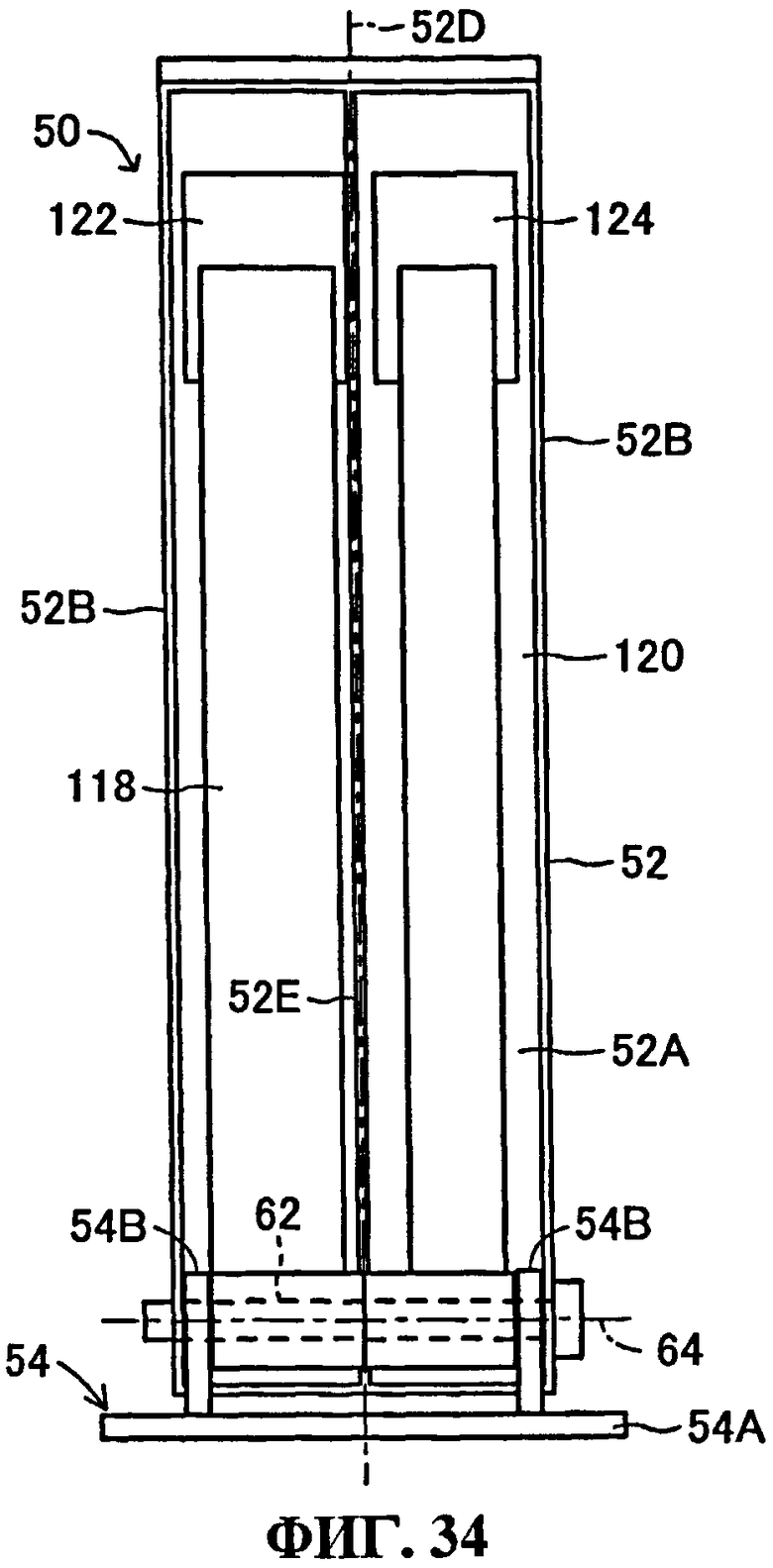
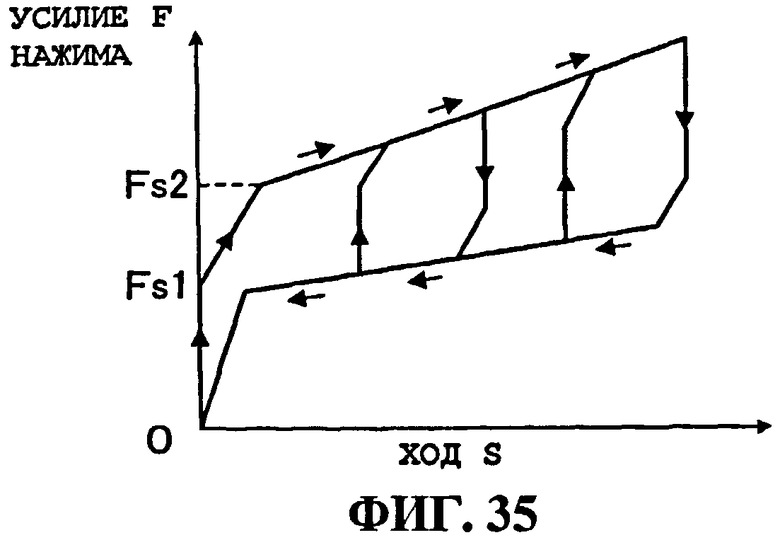
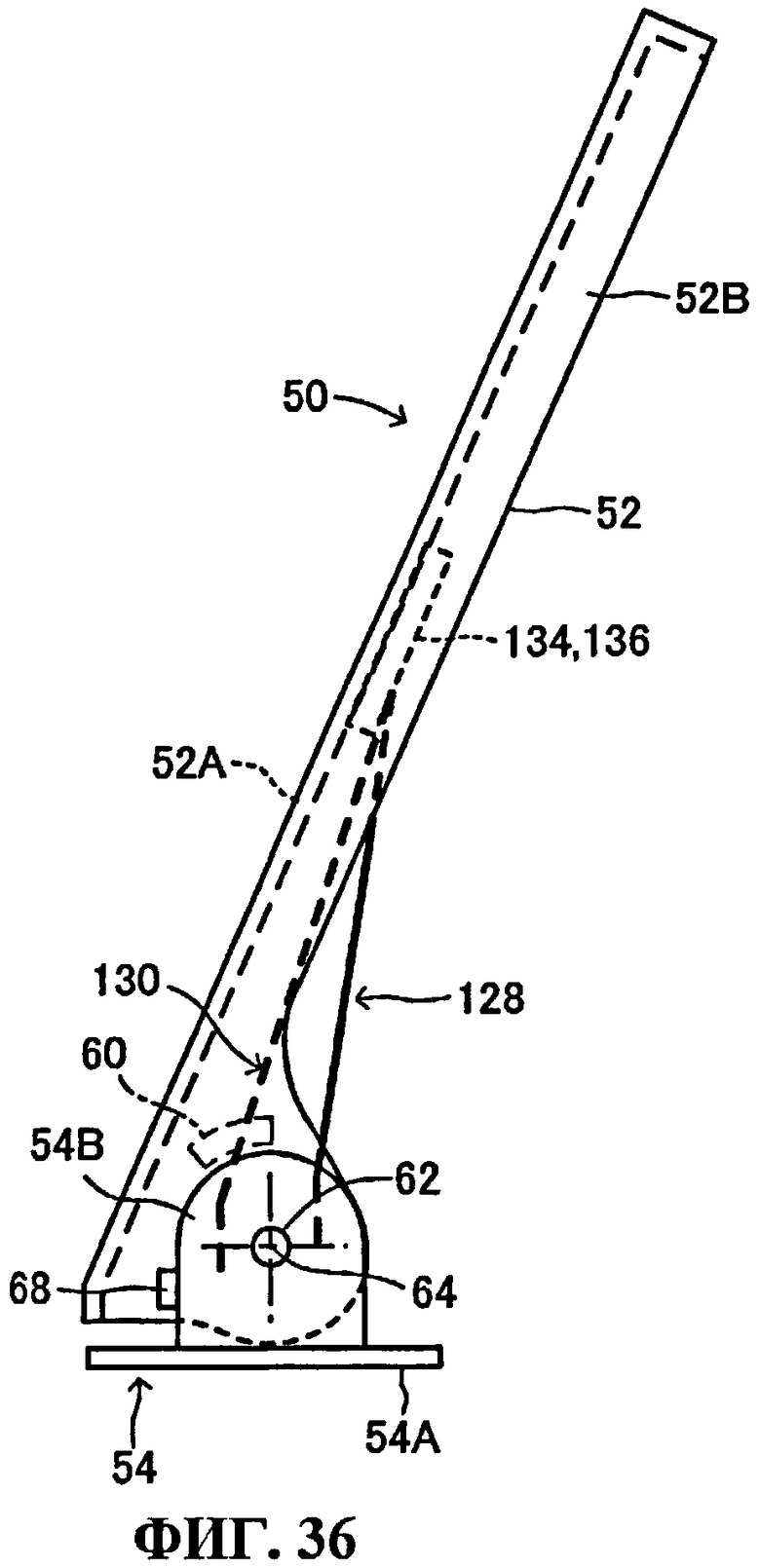
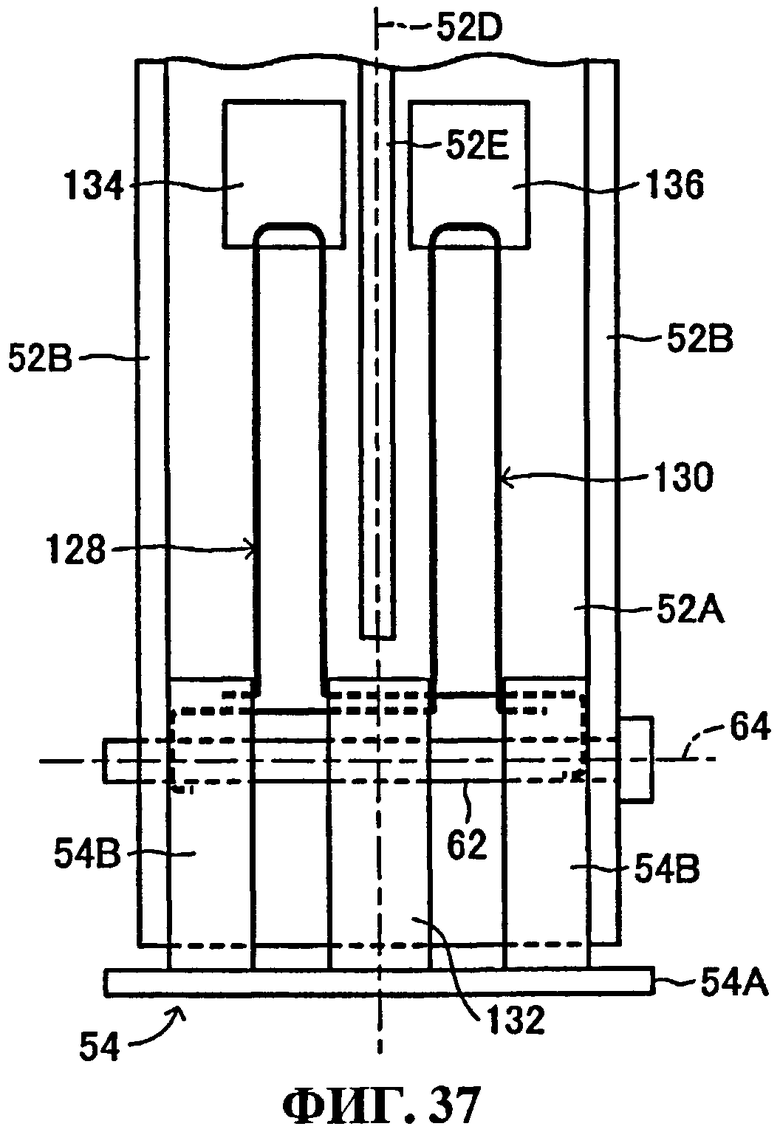
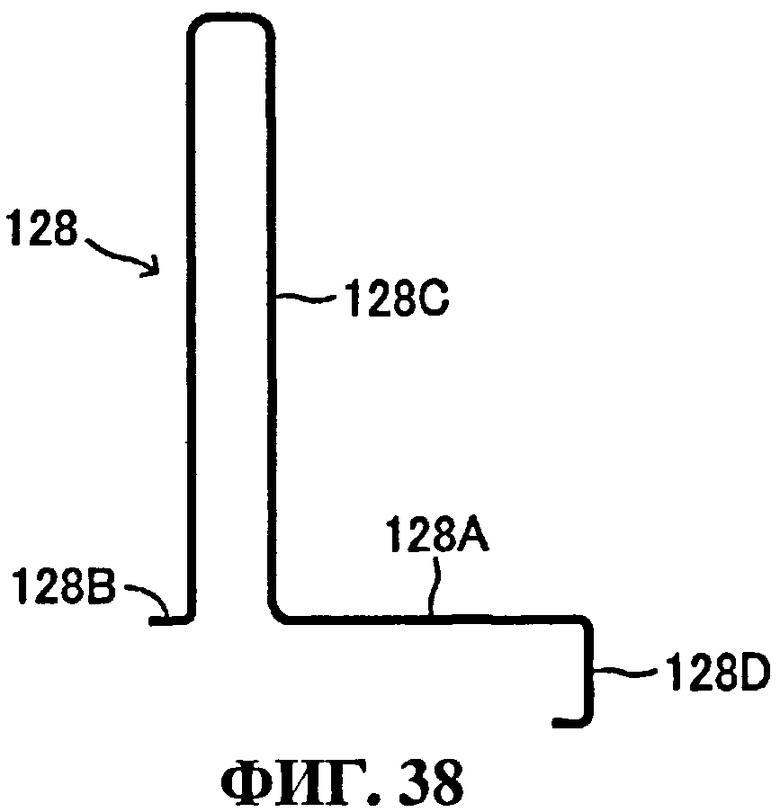
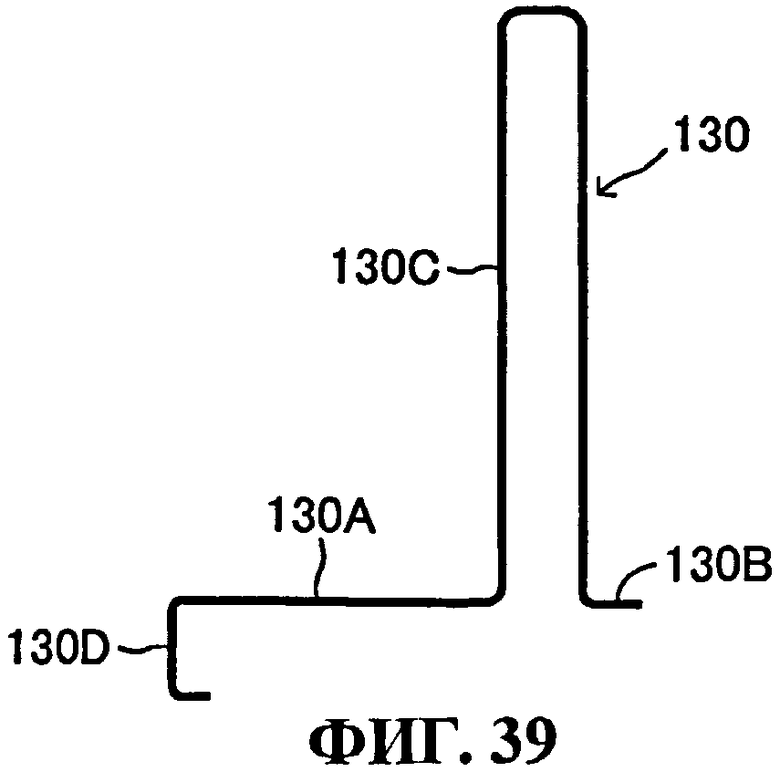
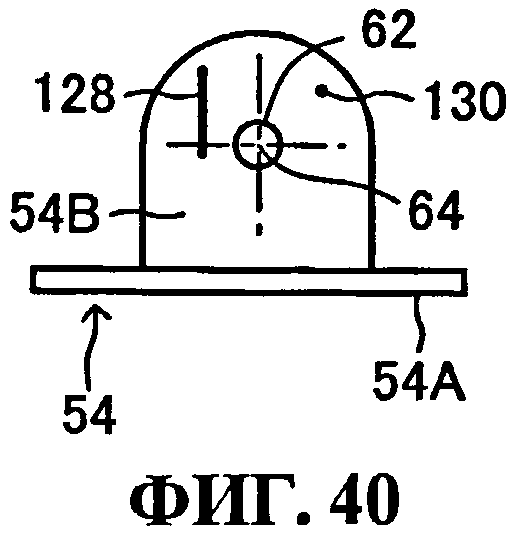
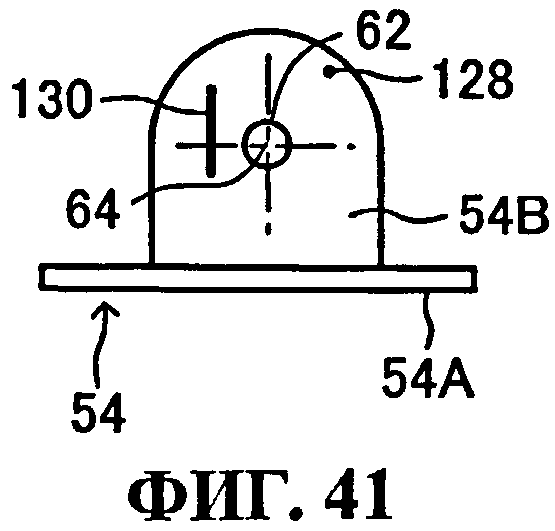
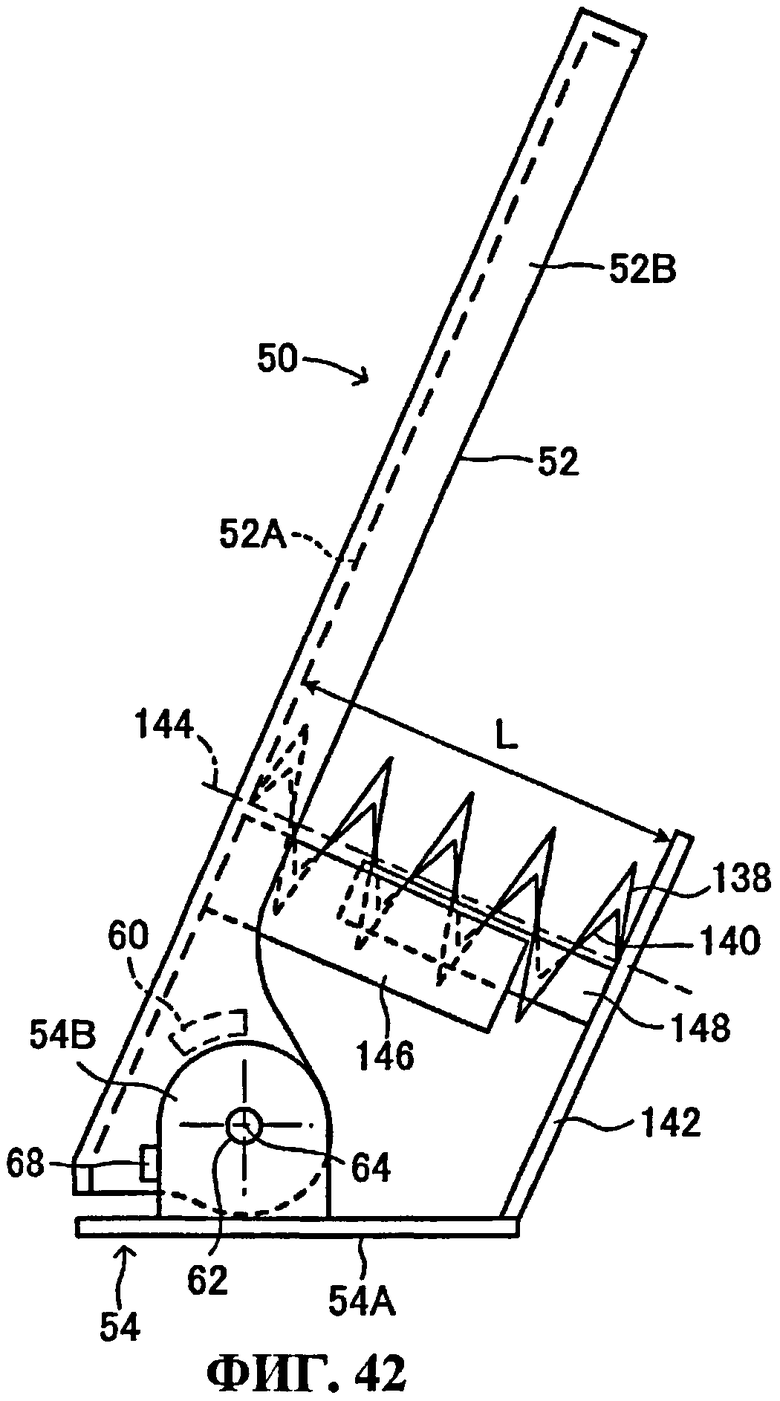
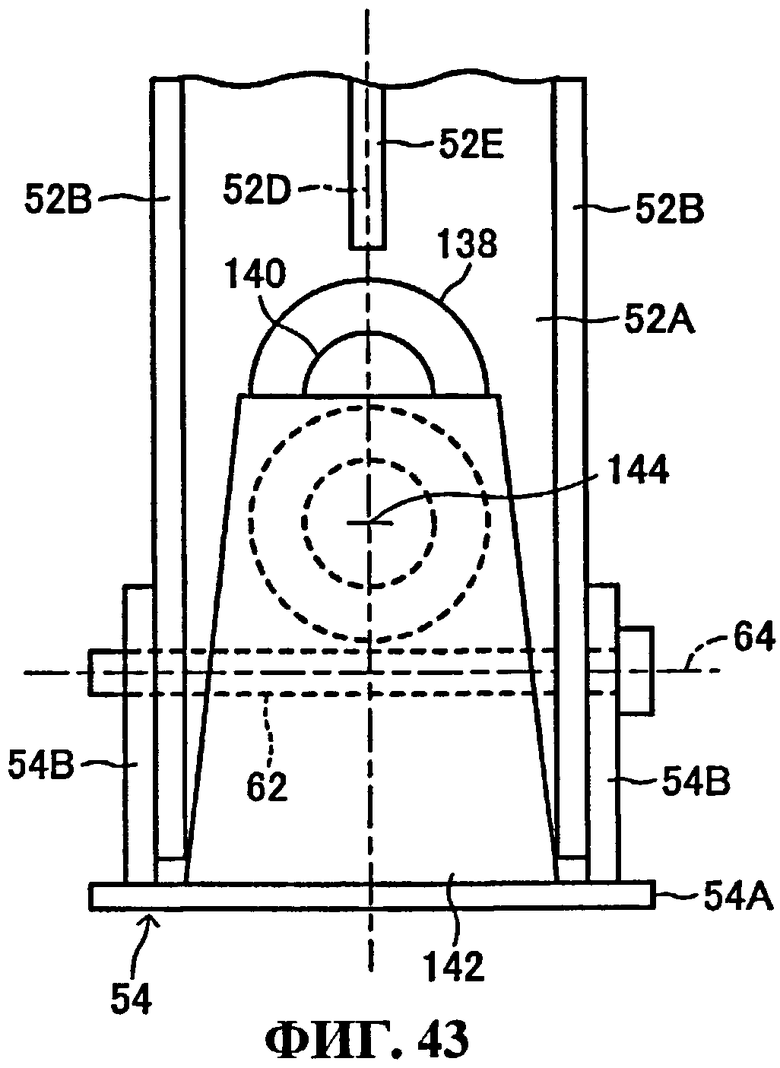
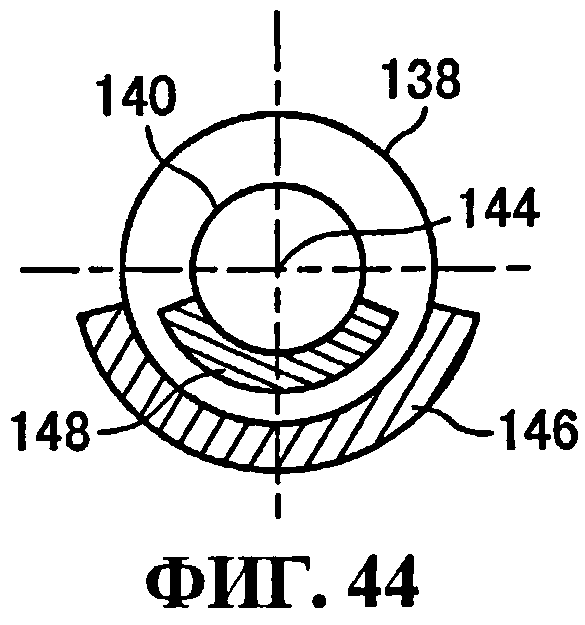
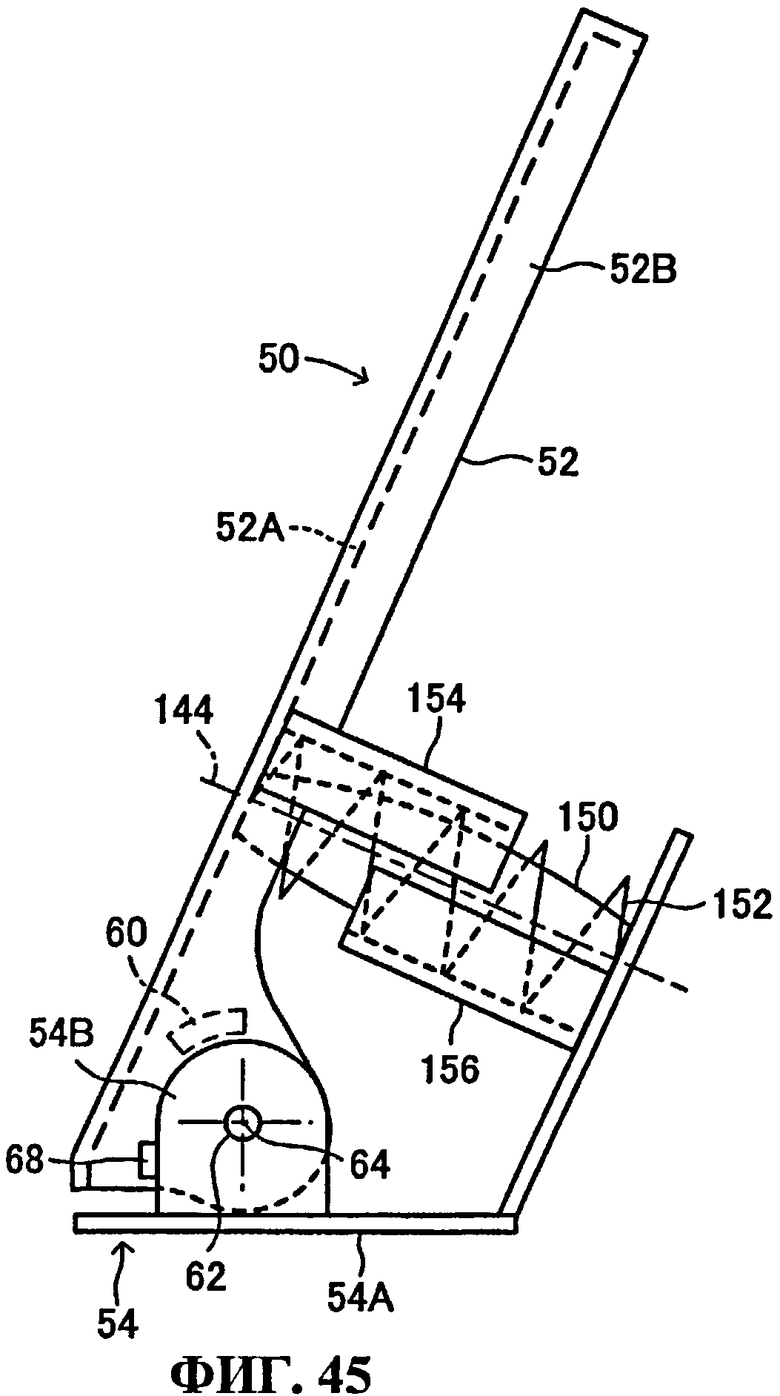
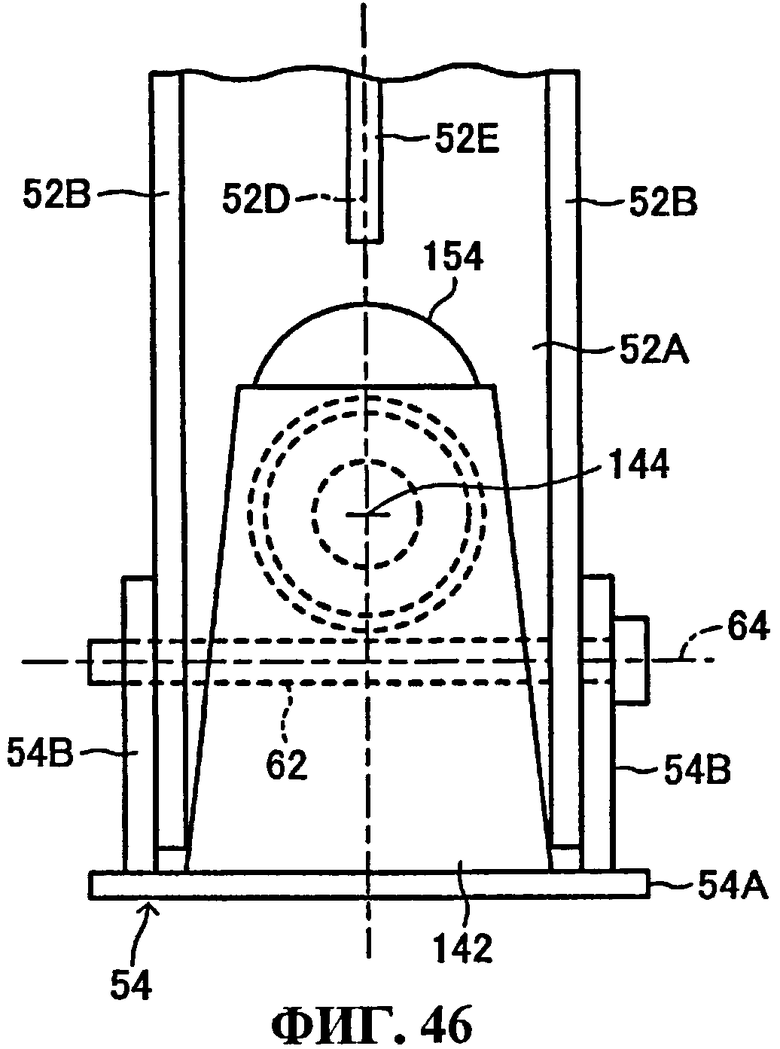
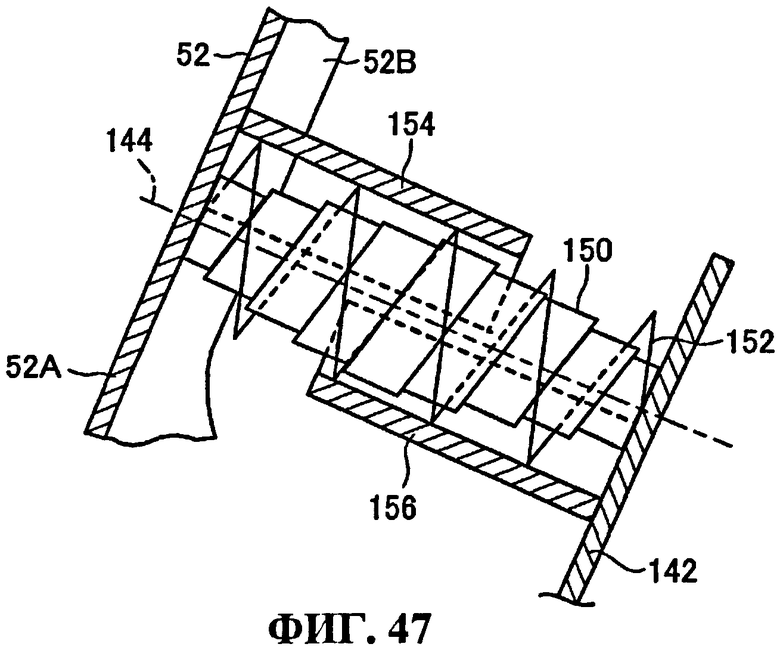
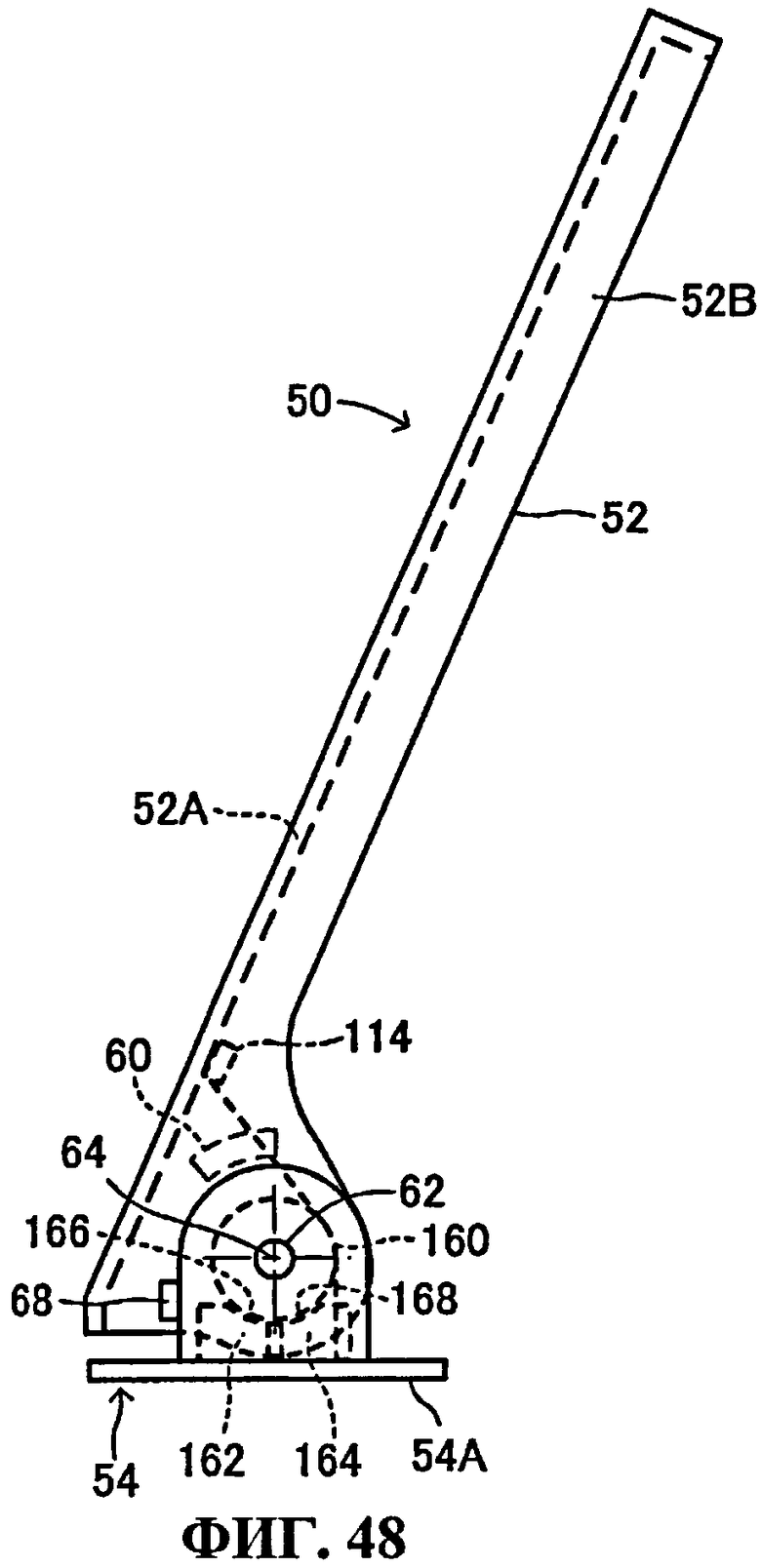
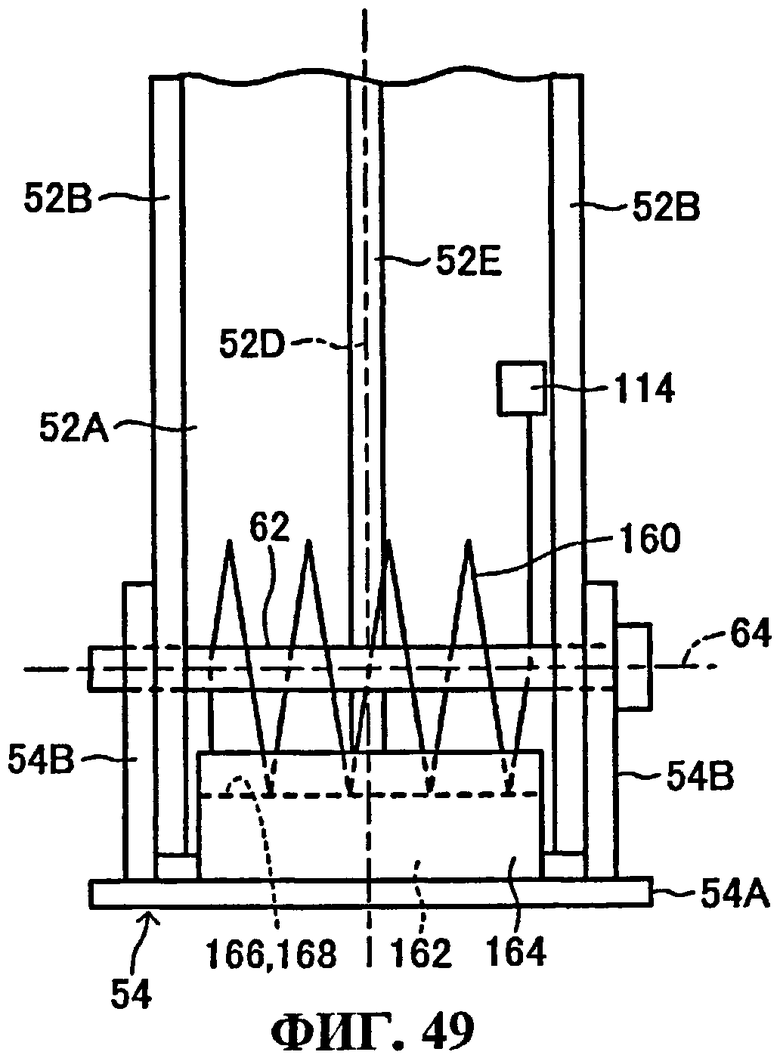
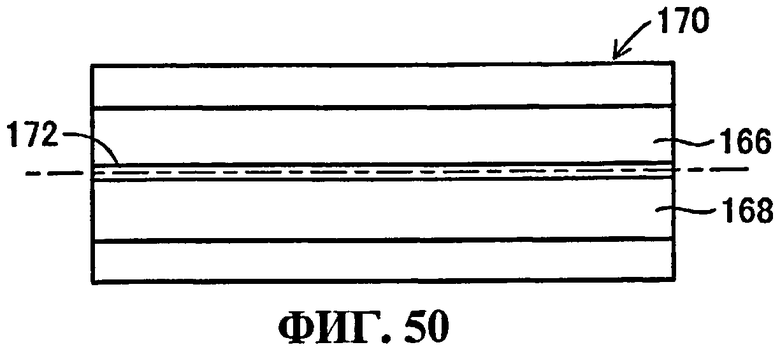
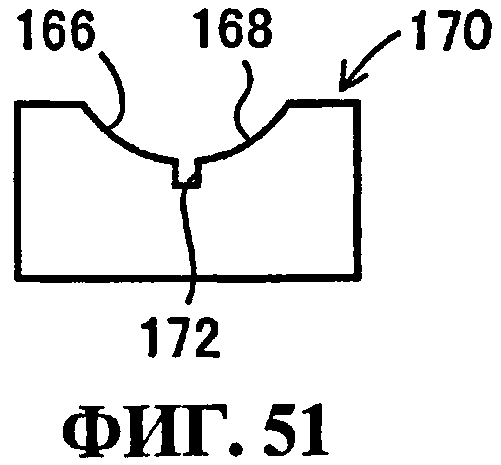
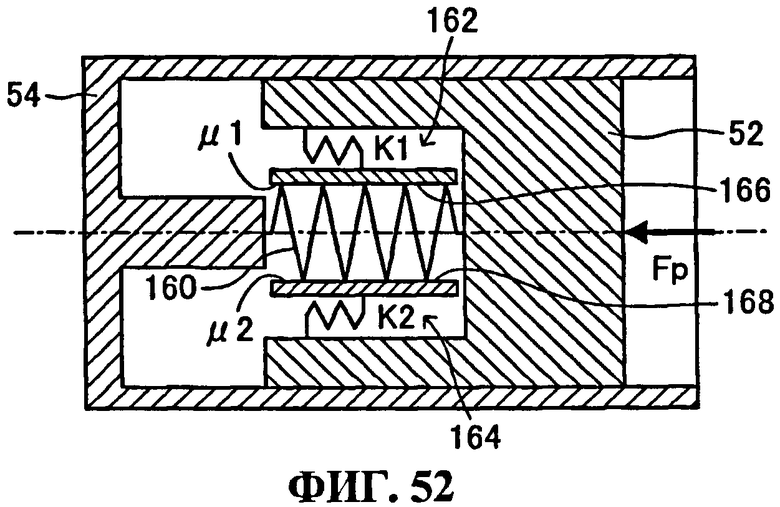
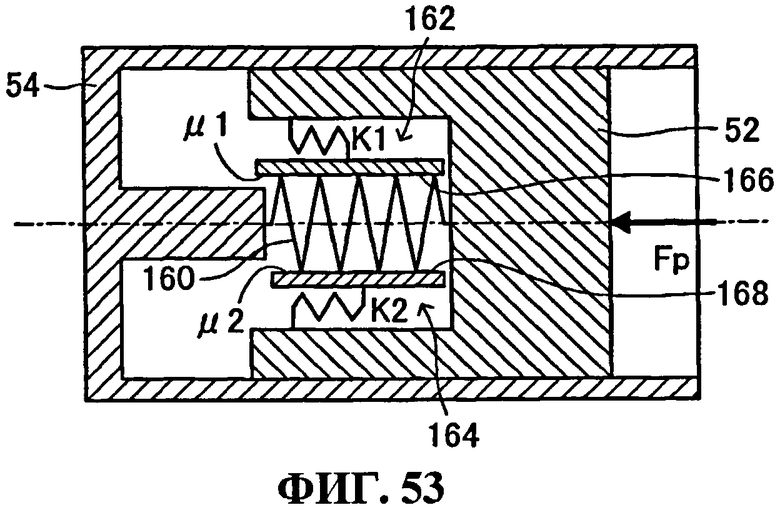
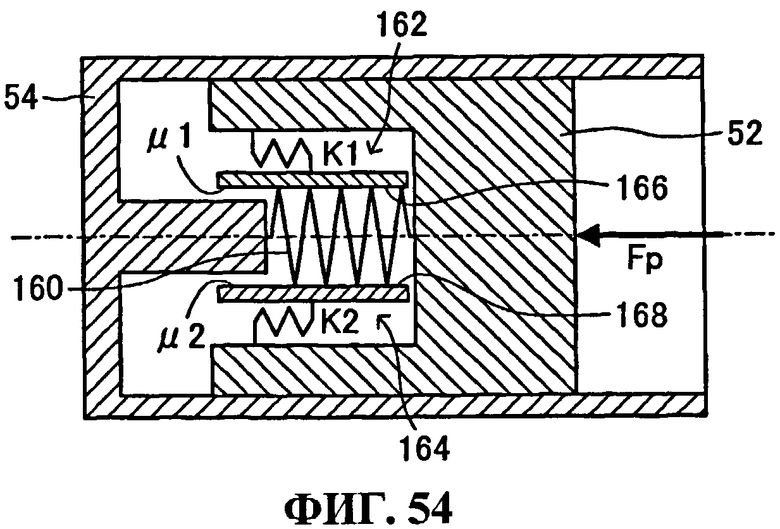
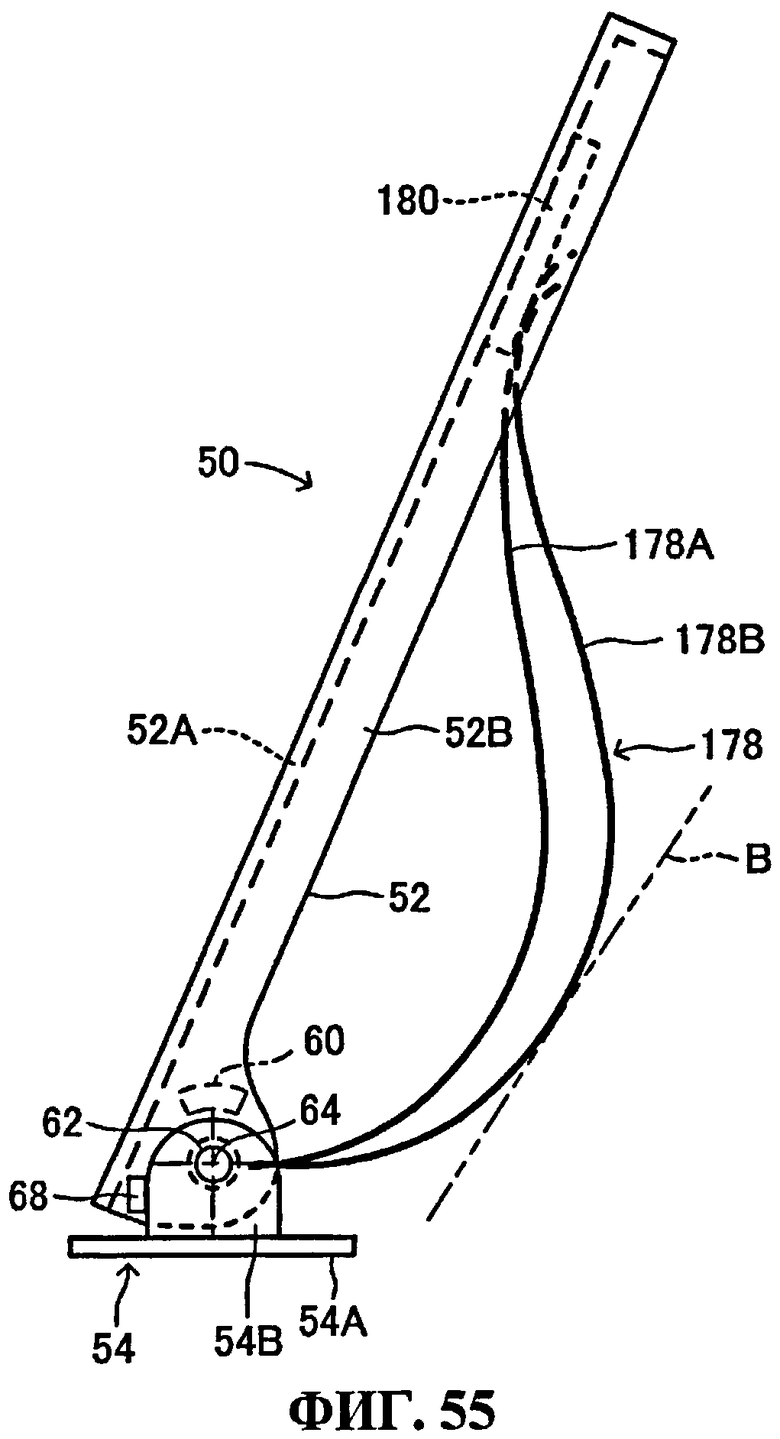
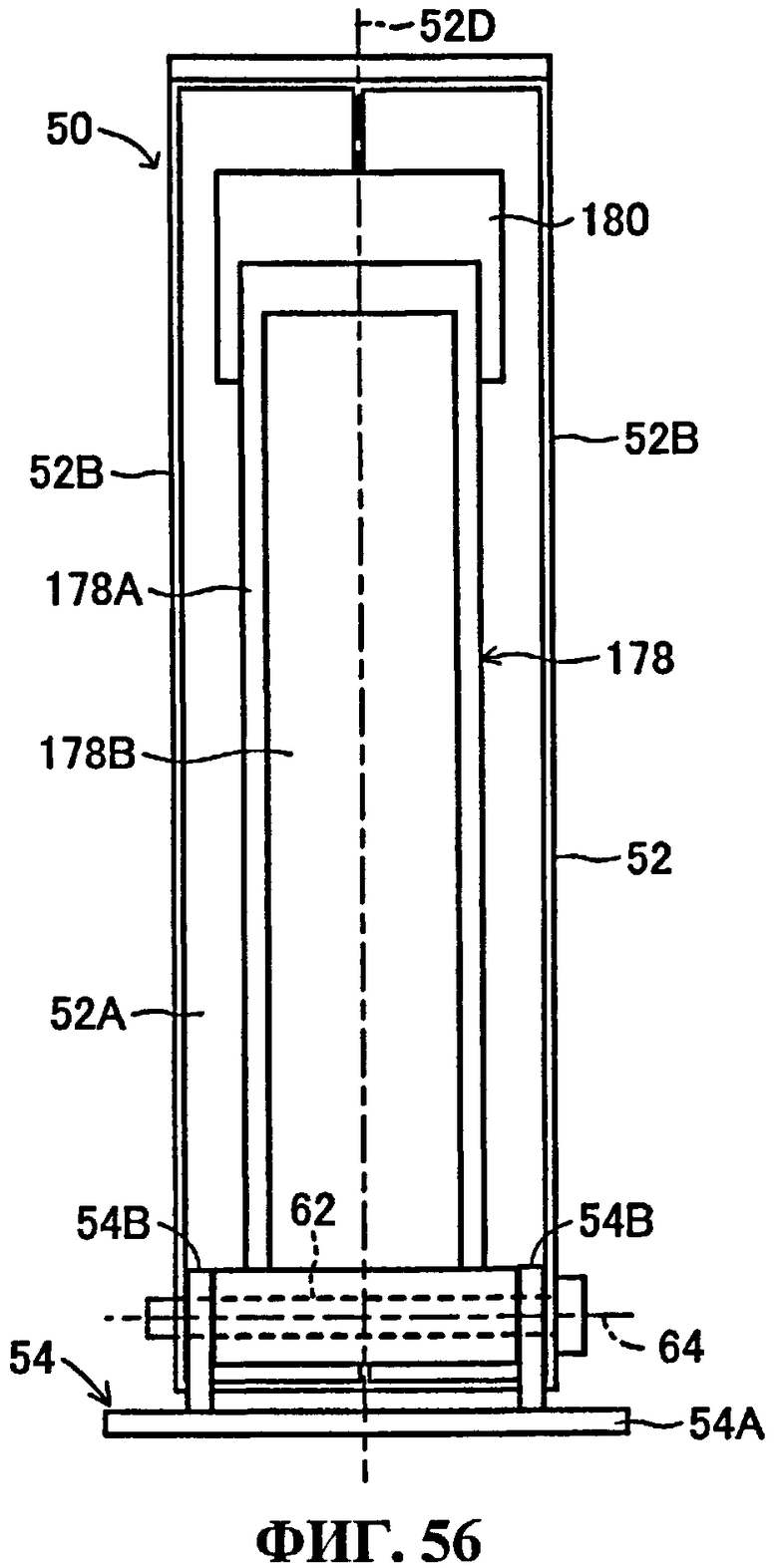
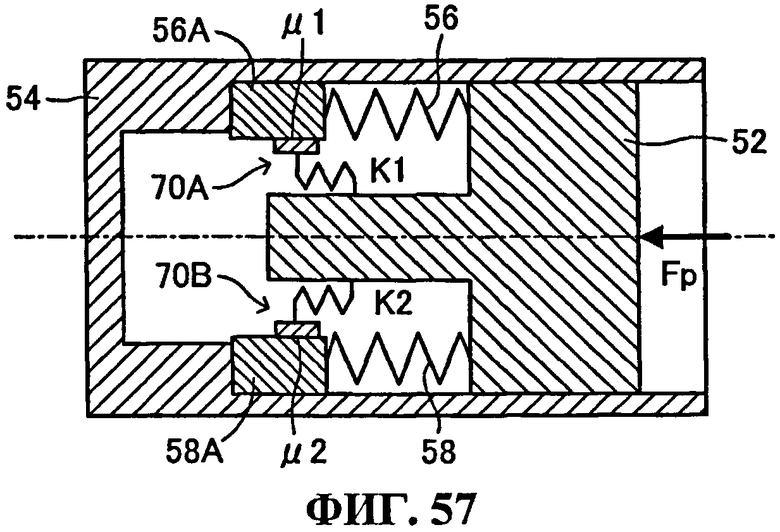
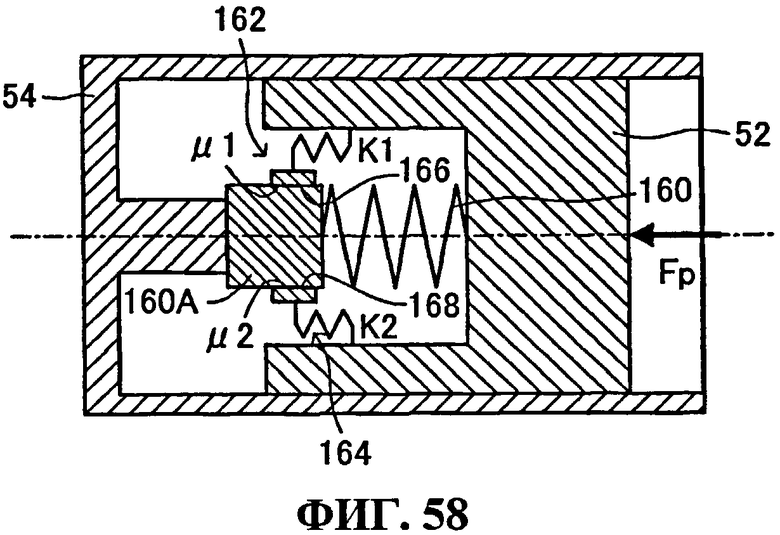
Изобретение относится к области машиностроения, в частности к исполнительным устройствам с педальным управлением. Исполнительное устройство включает в себя рычаг педали, опорный корпус, пружину для поджима рычага педали в направлении возврата, первую прокладку и вторую прокладку для создания соответственно первой силы сопротивления и второй силы сопротивления относительному повороту рычага педали. По первому варианту исполнительное устройство также содержит элемент для обеспечения смещения, который обеспечивает возможность перемещения первой или второй пары поверхностей трения, имеющей больший коэффициент статического трения, вместе с рычагом педали при их относительном смещении. По второму варианту исполнительное устройство также содержит упругое тело, которое обеспечивает возможность перемещения первой или второй пары поверхностей трения, имеющей больший коэффициент статического трения, вместе с рычагом педали при их относительном смещении. По третьему варианту в исполнительном устройстве максимальная сила статического трения части второй прокладки, предназначенной для обеспечения фрикционного взаимодействия, больше максимальной силы статического трения части первой прокладки, предназначенной для обеспечения фрикционного взаимодействия. Вторая прокладка имеет зону, в которой модуль упругости второй части, предназначенной для обеспечения упругой деформации, меньше модуля упругости той части первой прокладки, которая предназначена для обеспечения упругой деформации, применительно к упругой деформации в тот момент, когда рычаг педали перемещается относительно опорного корпуса. Достигается повышение легкости устойчивого поддержания величины нажима на приводной элемент с ножным управлением, такой как педаль акселератора, при одновременном ослаблении ощущения нажима на стенку во время начала нажатия на приводной элемент. 3 н. и 13 з.п. ф-лы, 58 ил.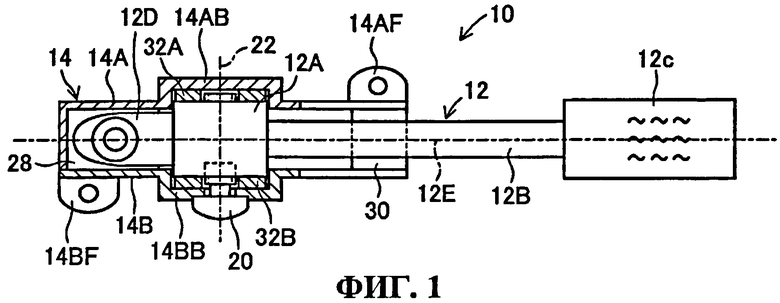
1. Исполнительное устройство с педальным управлением, содержащее приводной элемент, приводимый в действие ногой, опорное средство, выполненное с возможностью обеспечения опоры для приводного элемента таким образом, что приводной элемент может подвергаться относительному смещению относительно опорного средства, первую пару поверхностей трения и вторую пару поверхностей трения, каждая из которых включает в себя спаренные поверхности трения, которые предназначены для создания силы сопротивления, противодействующей относительному смещению приводного элемента, посредством силы трения, образованной между спаренными поверхностями трения, и которые отличаются друг от друга по коэффициенту статического трения, и элемент для обеспечения смещения, который обеспечивает возможность перемещения первой или второй пары поверхностей трения, имеющей больший коэффициент статического трения, вместе с приводным элементом при их относительном смещении.
2. Устройство по п.1, в котором отношение относительного смещения приводного элемента к входному воздействию на приводной элемент варьируется до, по меньшей мере, трех значений, и, в процессе увеличения входного воздействия после начала увеличения, отношение устанавливается на уровне верхнего значения в тот момент, когда входное воздействие имеет большую величину, по сравнению с моментом, когда входное воздействие имеет малую величину.
3. Устройство по п.1, в котором отношение относительного смещения приводного элемента к входному воздействию на приводной элемент варьируется до, по меньшей мере, трех значений, и в процессе уменьшения входного воздействия после начала уменьшения, отношение устанавливается на уровне нижнего значения в тот момент, когда входное воздействие имеет большую величину, по сравнению с моментом, когда входное воздействие имеет малую величину.
4. Исполнительное устройство с педальным управлением, содержащее приводной элемент, проводимый в действие ногой, опорное средство, выполненное с возможностью обеспечения опоры для приводного элемента таким образом, что приводной элемент может подвергаться относительному смещению относительно опорного средства, первую пару поверхностей трения и вторую пару поверхностей трения, каждая из которых включает в себя спаренные поверхности трения, которые предназначены для создания силы сопротивления, противодействующей относительному смещению приводного элемента, посредством силы трения, образованной между спаренными поверхностями трения, и которые отличаются друг от друга по коэффициенту статического трения, и упругое тело, которое обеспечивает возможность перемещения первой или второй пары поверхностей трения, имеющей больший коэффициент статического трения, вместе с приводным элементом при их относительном смещении.
5. Устройство по п.4, в котором упругое тело образует одну из поверхностей трения из первой или второй пары поверхностей трения, имеющей больший коэффициент статического трения.
6. Устройство по п.4, в котором отношение относительного смещения приводного элемента к входному воздействию на приводной элемент варьируется до, по меньшей мере, трех значений, и, в процессе увеличения входного воздействия после начала увеличения, отношение устанавливается на уровне верхнего значения в тот момент, когда входное воздействие имеет большую величину, по сравнению с моментом, когда входное воздействие имеет малую величину.
7. Устройство по п.4, в котором отношение относительного смещения приводного элемента к входному воздействию на приводной элемент варьируется до, по меньшей мере, трех значений, и, в процессе уменьшения входного воздействия после начала уменьшения, отношение устанавливается на уровне нижнего значения в тот момент, когда входное воздействие имеет большую величину, по сравнению с моментом, когда входное воздействие имеет малую величину.
8. Исполнительное устройство с педальным управлением, содержащее приводной элемент, приводимый в действие ногой, опорное средство, выполненное с возможностью обеспечения опоры для приводного элемента таким образом, что приводной элемент может подвергаться относительному смещению относительно опорного средства, возвратное поджимающее средство, поджимающее приводной элемент в направлении, противоположном тому направлению, в котором увеличивается величина воздействия на приводной элемент, средство для создания первой силы сопротивления, выполненное с возможностью создания - во время относительного смещения приводного элемента - первой силы сопротивления, противодействующей относительному смещению, посредством силы трения, создаваемой первой частью, предназначенной для обеспечения трения скольжения, и упругой силы, создаваемой первой частью, предназначенной для обеспечения упругой деформации, и средство для создания второй силы сопротивления, выполненное с возможностью создания - во время относительного смещения приводного элемента - второй силы сопротивления, противодействующей относительному смещению, посредством силы трения, создаваемой второй частью, предназначенной для обеспечения трения скольжения, и упругой силы, создаваемой второй частью, предназначенной для обеспечения упругой деформации, при этом максимальная сила статического трения, создаваемая второй частью, предназначенной для обеспечения трения скольжения, превышает максимальную силу статического трения, создаваемую первой частью, предназначенной для обеспечения трения скольжения, и вторая часть, предназначенная для обеспечения упругой деформации, имеет зону, в которой модуль упругости второй части, предназначенной для обеспечения упругой деформации, меньше модуля упругости первой части, предназначенной для обеспечения упругой деформации.
9. Устройство по п.8, в котором даже тогда, когда воздействующая сила, приложенная к приводному элементу, варьируется в пределах изменений, не превышающих воздействующую силу, соответствующую максимальной силе статического трения, создаваемой первой частью, предназначенной для обеспечения трения скольжения, приводной элемент не подвергается относительному смещению в такой степени, какая была бы ощутима для оператора.
10. Устройство по п.8 или 9, в котором характеристика зависимости между воздействующей силой, приложенной к приводному элементу, и относительным смещением приводного элемента представляет собой характеристику с двумя перегибами, имеющую первую точку перегиба и вторую точку перегиба, в которой воздействующая сила, приложенная к приводному элементу, превышает воздействующую силу, приложенную к приводному элементу, в первой точке перегиба, и воздействующая сила в первой точке перегиба составляет одну вторую или более от воздействующей силы во второй точке перегиба.
11. Устройство по п.8, дополнительно содержащее средство определения величины воздействия, предназначенное для определения величины воздействия на приводной элемент со стороны оператора, при этом средство определения величины воздействия распознает относительное смещение приводного элемента, равное заданной опорной величине или превышающее ее, и опорная величина установлена на уровне относительного смещения во второй точке перегиба или больше него.
12. Устройство по п.8, в котором отношение величины изменения относительного смещения к величине изменения воздействующей силы на участке характеристики, на котором воздействующая сила, приложенная к приводному элементу, больше воздействующей силы во второй точке перегиба, больше отношения величины изменения относительного смещения к величине изменения воздействующей силы на участке, на котором воздействующая сила, приложенная к приводному элементу, больше воздействующей силы в первой точке перегиба и равна или меньше воздействующей силы во второй точке перегиба.
13. Устройство по п.8, в котором, по мере увеличения воздействующей силы, приложенной к приводному элементу, по меньшей мере, прижимающая сила между находящимися в скользящем контакте друг с другом элементами второй части, предназначенной для обеспечения трения скольжения, увеличивается.
14. Устройство по п.13, в котором прижимающая сила увеличивается вместе с воздействующей силой, приложенной к приводному элементу, посредством действия поджимающей силы, создаваемой возвратным поджимающим средством, между находящимися в скользящем контакте друг с другом элементами второй части, предназначенной для обеспечения трения скольжения.
15. Устройство по п.8, в котором средство для создания первой силы сопротивления опирается на приводной элемент или опорное средство и находится в скользящем контакте с другим из них, в результате чего образуется первая часть, предназначенная для обеспечения трения скольжения, и средство для создания второй силы сопротивления опирается на приводной элемент или опорное средство, и находится в скользящем контакте с другим из них, в результате чего образуется вторая часть, предназначенная для обеспечения трения скольжения.
16. Устройство по п.8, в котором возвратное поджимающее средство имеет первое и второе возвратные поджимающие средства, средство для создания первой силы сопротивления опирается на приводной элемент или на опорное средство и находится в скользящем контакте с первым возвратным поджимающим средством, в результате чего образуется первая часть, предназначенная для обеспечения трения скольжения, и средство для создания второй силы сопротивления опирается на приводной элемент или на опорное средство и находится в скользящем контакте со вторым возвратным поджимающим средством, в результате чего образуется вторая часть, предназначенная для обеспечения трения скольжения.
| УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ НАПРЯЖЕНИЯ | 0 |
|
SU208009A1 |
| JP 2002114052 A, 16.04.2002 | |||
| US 2004045393 A1, 11.03.2004 | |||
| US 6070490 A, 06.06.2000 | |||
| Пробка для аккумулятора | 1943 |
|
SU63296A1 |

