ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
В последних достижениях в области оптимизации бурения используется анализ потребления энергии в реальном времени в системе бурения, чтобы оптимизировать механическую скорость проходки (ROP). Такая оптимизация может обеспечить мгновенные увеличения ROP на 100-400% и увеличение длины проходки в сутки. Подобные результаты могут быть достигнуты в мягких и крепких породах, крутых и пологих наклонных скважинах и при всех типах буровых установок.
Однако трудно объективно оценить работу операторов по скорости бурения. Иными словами, буровые долота часто оцениваются на основе смещения скважины, но скорость бурения часто ограничиваются факторами, которые бурильщик не контролирует, и способами, которые не могут быть зарегистрированы в буровом журнале. Следовательно, скорости бурения между двумя скважинами при использовании одних и тех же долот могут значительно отличаться. Методика, которая используется для оценки работы бурового долота, часто более важна, чем оценка самого долота.
Бурильщики проводят множество тестов, чтобы оптимизировать работу. Самым общим является "буровой тест", который состоит из простого экспериментирования с различным весом, приложенным на долото (WOB), и регулирование частоты вращения бурового долота (RPM) с последующим подведением результатов. Параметры, которые приводят к самой высокой скорости проходки ROP, затем используются для последующих операций. В некотором смысле во всех схемах оптимизации используется подобный процесс сравнительного анализа. Таким образом, бурильщики стремятся идентифицировать параметры, которые приводят к лучшим результатам относительно других установленных параметров.
Одна из самых ранних схем представляет собой тест "вращение долота в забое без углубления", в котором бурильщик применяет высокую нагрузку WOB и включает тормоз, чтобы воспрепятствовать движению вершины бурильной колонны, продолжая вращать буровую колонну. По мере продвижения долота буровая колонна удлиняется, и нагрузка на долото снижается. ROP вычисляется от изменения в скорости удлинения бурильной колонны по мере снижения веса. Точка, в которой скорость проходки перестает соответствовать линейному увеличению WOB, определяется как точка «разведочного ствола». Она берется как оптимальный параметр WOB. Этот процесс повышает рабочие характеристики, но не обеспечивает объективную оценку истинной потенциальной скорости бурения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Настоящее изобретение лучше всего может быть понято из следующего подробного описания со ссылками на приложенные чертежи.
Фигура 1 - схема устройства в соответствии с целями настоящего изобретения.
Фигура 2А - блок-схема способа в соответствии с целями настоящего изобретения.
Фигура 2В - блок-схема способа в соответствии с целями настоящего изобретения.
Фигура 3 - схема устройства в соответствии с целями настоящего изобретения.
Фигура 4А - схема устройства в соответствии с целями настоящего изобретения.
Фигура 4В - схема устройства в соответствии с целями настоящего изобретения.
Фигура 5А - блок-схема способа в соответствии с целями настоящего изобретения.
Фигура 5В - схема устройства в соответствии с целями настоящего изобретения.
Фигура 5С - блок-схема способа в соответствии с целями настоящего изобретения.
Фигура 5D - блок-схема способа в соответствии с целями настоящего изобретения.
Фигура 6А - блок-схема способа в соответствии с целями настоящего изобретения.
Фигура 6В - блок-схема способа в соответствии с целями настоящего изобретения.
Фигура 6С - блок-схема способа в соответствии с целями настоящего изобретения.
Фигура 7 - схема устройства в соответствии с целями настоящего изобретения.
Фигура 8 - схема устройства в соответствии с целями настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Следует понимать, что настоящее изобретение включает множество различных вариантов или примеров его осуществления с различными особенностями. Ряд примерных компонентов и их расположение описаны ниже в упрощенном варианте описания. Они, конечно, являются просто примерами и не ограничивают объем изобретения. Кроме того, в настоящем раскрытии цифровые позиции и/или буквы могут повторяться в различных примерах. Это повторение делается с целью простоты и ясности изложения, и само по себе не определяет зависимость между различными примерами осуществления и/или обсуждаемыми конфигурациями. Кроме того, формирование первого признака или второго признака изобретения в последующем описании может включать примеры осуществления, в которых первый и второй признаки формируются в прямой связи, и могут также включать примеры осуществления, в которых можно сформировать дополнительные признаки, вставляя первый и второй признака таким образом, что они уже не находятся в прямой связи между собой.
На фигуре 1 представлена схема устройства 100, демонстрирующая один или несколько аспектов настоящего изобретения. Устройство 100 является наземной буровой установкой или включает такую установку. Однако один или несколько положений настоящего изобретения могут быть применены к любому типу буровой установки, например самоподъемные буровые установки, полупогружные буровые установки, буровые суда, колонны насосно-компрессорных труб, установки для ремонта скважин, скважины, приспособленные для бурения и/или повторного входа в скважину и обсадные трубы буровых установок, среди других применений в рамках настоящего изобретения.
Устройство 100 включает мачту 105 для грузоподъемных механизмов, установленных над основанием буровой установки 110. Подъемный механизм включает кронблок 115 и талевый блок 120. Кронблок 115 прикреплен около вершины мачты 105, а талевый блок 120 свешивается с кронблока 115 на буровом канате 125. Один конец бурового каната 125 проходит от подъемного механизма до лебедок 130, которые служат для намотки бурового каната на барабан 125 для подъема или опускания талевого блока 120 относительно пола буровой установки 110. Другой конец бурового каната 125, известный как крепление неподвижного конца, закреплен в стационарном положении, возможно около лебедок 130 или в другом месте на буровой установке.
Крюк 135 прикреплен к нижней части талевого блока 120. Верхний привод 140 висит на крюке 135. Полый вал 145 проходит от верхнего привода 140 до переводника с перенарезаемой резьбой 150, который прикреплен к бурильной колонне 155 в стволе скважины 160. Альтернативно полый вал 145 может быть непосредственно прикреплен к бурильной колонне 155.
Термин "полый вал", как он используется здесь, не ограничен компонентом, который проходит непосредственно от верхнего привода или который традиционно упоминается как полый вал. Например, по настоящему изобретению "полый вал" может дополнительно или альтернативно включать главный вал, ведущий вал, выходной вал и/или другой компонент, который передает крутящий момент, положение и/или вращение от верхнего привода или другого вращающего механизма к бурильной колонне, по меньшей мере, косвенно. Тем не менее, просто ради ясности и краткости, эти компоненты могут быть все вместе называться здесь как "полый вал".
Бурильная колонна 155 включает связанные между собой секции бурильной трубы 165, оборудование низа бурильной колонны (ВНА) 170 и буровое долото 175. Оборудование ВНА 170 может включать среди других компонентов стабилизаторы, утяжеленные бурильные трубы и/или оборудование для каротажа во время бурения (MWD) или подвесные инструменты. Буровая коронка 175, которая также упоминается здесь как инструмент, связана с дном оборудования низа обсадной колонны КНБК 170 или иным образом прикреплена к бурильной колонне 155. Один или несколько насосов 180 могут подавать промывочную жидкость к бурильной колонне 155 через шланг или другой трубопровод 185, который может быть связан с верхним приводом 140.
Скважинное каротажное оборудование (MWD) или инструменты, закрепленные на талевом канате, могут использоваться для оценки физических свойств, таких как давление, температура, крутящий момент, нагрузка на долото (WOB), вибрация, наклон, азимут, ориентация скважинного инструмента в трехмерном пространстве, и/или другие параметры скважины. Эти измерения могут быть сделаны в скважине, сохранены в твердотельной памяти в течение некоторого времени и переданы из прибора(ов) на поверхность. Способы передачи данных могут включать, например, кодирование данных в цифровой формат и передачу кодированных данных на поверхность, возможно, как импульс давления в промывочной жидкости или циркуляционной системе, передачу звукового сигнала через бурильную колонну 155, электронную передачу через талевый канат или проводную трубу и/или передачу виде электромагнитного импульса. Инструментальные средства MWD и/или другие части ВНА 170 могут сохранять измеренные значения для их последующего извлечения через талевый канат и/или когда ВНА 170 извлечено из ствола скважины 160.
В одном примере осуществления изобретения устройство 100 также может включать вращающийся превентор выброса (ВОР) 158, в котором при бурении скважины 160 используется бурение с нулевым перепадом давления или способы управления бурением под давлением. В таком примере осуществления буровой раствор в кольцевом пространстве и бурение могут быть поддержаны давлением с поверхности с фактическим желательным расходом и давлением, с возможным регулированием системой штуцеров и с жидкостью и давлением, сохраняемым в устье скважины, направляя поток вниз к штуцеру вращающимся противовыбросовым превентором 158. Устройство 100 также может включать кольцевой датчик давления 159, используемый для измерения давления в кольцевом пространстве, определенном, например, между стволом скважины 160 (или обсадными трубами) и бурильной колонной 155.
В примере осуществления изобретения, изображенном на фигуре 1, верхний привод 140 используется для передачи вращательного движения бурильной колонне 155. Однако настоящее изобретение также применимо при использовании других систем передачи момента, таких как силовой гидравлический вертлюг, ротор, установки для ремонта скважин с использованием непрерывной колонны насосно-компрессорных труб, забойного двигателя и/или обычного роторного станка.
Устройство 100 также включает контроллер 190, используемый для управления или помощи при управлении одного или нескольких компонентов устройства 100. Например, контроллер 190 может быть использован для передачи оперативных управляющих сигналов лебедкам 130, верхнему приводу 140, ВНА 170 и/или насосу 180. Контроллер 190 может быть автономным узлом, установленным около мачты 105 и/или рядом с другими компонентами устройства 100. В примере осуществления изобретения контроллер 190 включает одну или несколько систем, расположенных в диспетчерской, поблизости от устройства 100, таких как универсальное укрытие, часто называемое "бытовкой", служащее как помещение для хранения инструмента, служебное помещение, центр связи и кают-компания. Контроллер 190 может быть использован для передачи оперативных управляющих сигналов лебедкам 130, верхнему приводу 140, ВНА 170, и/или насосу 180 через проводные или беспроводные средства передачи, которые для упрощения не показаны на фигуре 1.
Контроллер 190 также используется для приема электронных сигналов через проводные или беспроводные средства передачи данных (на фигуре 1 не показаны) от множества датчиков, включая датчики в устройстве 100, где каждый датчик используется для обнаружения технологической характеристики или параметра. Один такой датчик представляет собой описанный выше датчик давления 159 для измерения давления в кольцевом пространстве у поверхности земли. Устройство 100 может включать датчик давления 170а для измерения давления в кольцевом пространстве скважины, соединенный или иным образом связанный с ВНА 170. Датчик давления 170а может быть использован для определения значения давления или диапазона давления в кольцевом пространстве между внешней поверхностью ВНА 170 и внутренним диаметром ствола скважины 160, которое также может упоминаться как давление в обсадной колонне, скважинное давление в обсадной колонне, давление в обсадной колонне MWD или скважинное кольцевое в затрубном пространстве.
Отметим, что значение слова "обнаружение" в контексте настоящего изобретения может включать обнаружение, определение, измерение, вычисление и/или иную процедуру получения данных. Точно так же значение слова "обнаруживает" в контексте настоящего изобретения может включать значение глагола обнаружить, определить, измерить, вычислить и/или получать данные иным образом.
Устройство 100 может дополнительно или альтернативно включать ударный или вибрационный датчик 170b, который используется для обнаружения удара и/или вибрации в ВНА 170. Устройство 100 может дополнительно или альтернативно включать датчик перепада давления (ΔР) 172а в гидравлическом забойном двигателе, который используется для обнаружения величины перепада давления или диапазона перепада давления в контуре одного или нескольких двигателей 172 ВНА 170. Один или несколько двигателей 172 каждый может представлять собой или включать объемный забойный двигатель, который использует гидравлическую мощность промывочной жидкости для привода бурового долота 175. Этот двигатель также называется гидравлическим забойным двигателем. Один или несколько датчиков крутящего момента 172b также могут быть включены в ВНА 170 для посылки данных в контроллер 190, который определяет крутящий момент, приложенный к буровому долоту 175 одним или несколькими двигателями 172.
Устройство 100 может дополнительно или альтернативно включать датчик скважинного инструмента 170с, используемый для определения текущей ориентации скважинного инструмента. Датчик скважинного инструмента 170с может быть обычным датчиком или разработанным в будущем магнитным датчиком скважинного инструмента, который определяет ориентацию скважинного инструмента относительно магнитного северного или истинного северного полюса. Альтернативно или дополнительно, датчик скважинного инструмента 170с может быть обычным датчиком или разработанный в будущем гравитационным датчиком скважинного инструмента, который определяет ориентацию скважинного инструмента относительно поля тяготения Земли. Датчик скважинного инструмента 170с также может быть или альтернативно включать обычный или разработанным в будущем гироскопический датчик. Устройство 100 может дополнительно или альтернативно включать датчик WOB 170d, встроенный в оборудование ВНА 170 и используемый для определения нагрузки WOB в или около ВНА 170.
Устройство 100 может дополнительно или альтернативно включать датчик крутящего момента 140а, соединенный или иным образом связанный с верхним приводом 140. Датчик крутящего момента 140а альтернативно может быть расположен в ВНА 170 или связан с ним. Датчик крутящего момента 140а может быть использован для обнаружения величины или диапазона крутящего момента полого вала 145 и/или бурильной колонны 155 (например, в ответ на усилие, приложенное на бурильную колонну). Верхний привод 140 может дополнительно или альтернативно включать датчик скорости 140b, используемый для определения величины или диапазона частоты вращения полого вала 145.
Верхний привод 140, лебедка 130, буровое долото или талевый блок, буровой канат или механизм крепления неподвижного конца могут дополнительно включать датчик нагрузки на долото (WOB) 140 с или быть связаны с этим датчиком (например, один или несколько датчиков, установленных где-либо на пути грузоподъемного механизма для определения нагрузки WOB, которая может изменяться от одной буровой установки к другой), отличающийся от датчика WOB 170d. Датчик нагрузки 140с может быть использован для определения величины WOB или диапазона, где такое определение может быть выполнено на верхнем приводе 140, лебедке 130 или в другом компоненте устройства 100.
Детектирование, выполняемое описанными здесь датчиками, может быть выполнено один раз, выполняться непрерывно, периодически и/или через случайные промежутки времени. Определение параметров может быть выполнено вручную оператором или другим лицом, имеющим доступ к интерфейсу человек-машина (HMI), или осуществлено автоматически, например, вводя характеристику или параметр, удовлетворяющий предопределенному условию (например, по истечении промежутка времени, согласно графику хода буровых работ, достигающего предопределенной стадии, срока службы бурового долота и т.д.). Такие датчики и/или другие средства определения параметров могут включать один или несколько интерфейсов, которые могут быть местными на участке скважина/буровая установка или расположены в другом, отдаленном местоположении с сетью связи с системой.
На фигуре 2А представлена блок-схема способа 200а согласно одному или нескольким объектам настоящего изобретения. Способ 200а может быть выполнен во взаимодействии с одним или несколькими компонентами устройства 100, показанного на фигуре 1 во время работы устройства 100. Например, способ 200а может быть выполнен для ориентации скважинного инструмента во время операции бурения, выполняемой с помощью устройства 100.
Способ 200а включает стадию 210, во время которой измеряется текущая ориентация TFM скважинного инструмента. Ориентация TFM может быть измерена, используя обычный или разработанный в будущем магнитный датчик скважинного инструмента, который определяет ориентацию скважинного инструмента относительно магнитного северного полюса или истинного северного полюса. Альтернативно или дополнительно, ориентация TFM может быть измерена, используя обычный или разработанный в будущем гравитационный датчик скважинного инструмента, который определяет ориентацию скважинного инструмента относительно поля тяготения Земли. В примере осуществления изобретения ориентация TFM может быть измерена, используя магнитный датчик скважинного инструмента, когда конец ствола скважины отклонен на менее чем примерно 7° от вертикали, с последующим измерением гравитационным датчиком скважинного инструмента, когда окончание ствола скважины отклоняется не более чем примерно на 7° от вертикали. Однако в рамках настоящего изобретения также могут быть использованы гироскопические и/или другие средства для определения TFM.
На следующей стадии 220 ориентация TFM сравнивается с желательной ориентацией TFD скважинного инструмента. Если TFM достаточно равен TFD, как определено на стадии принятия решения 230, способ 200а возобновляется, и стадия 210 повторяется. Выражение "достаточно равен" может означать, в основном, равенство значений, когда разница не превышает нескольких процентов, или может альтернативно означать изменение не больше предопределенного угла, например, около 5°. Кроме того, повторение способа 200а может быть, в основном, немедленным или может иметь место период задержки, прежде чем способ 200а будет возобновлен, и будет повторена стадия 210.
Если TFM «недостаточно» равен TFD, как определено на стадии принятия решения 230, способ 200а переходит на стадию 240, во время которой полый вал вращается системой привода, например, на величину, равную разнице между TFM и TFD. Однако в рамках настоящего изобретения вал также может быть повернут на другую величину вращательного регулирования, выполняемого на стадии 240. После выполнения стадии 240 способ 200а возобновляется, и стадия 210 повторяется. Такое повторение может быть, в основном, немедленным, или может иметь место период задержки, прежде чем способ 200а будет возобновлен, и стадия 210 будет повторена.
На фигуре 2В представлена блок-схема другого примера осуществления способа 200а, показанного на фигуре 2А, определяемая здесь цифровым обозначением 200b. Способ 200b может быть выполнен во взаимодействии с одним или несколькими компонентами устройства 100, показанного на фигуре 1, во время работы устройства 100. Например, способ 200b может быть использован для ориентации скважинного инструмента во время операции бурения, выполняемого с помощью устройства 100.
Способ 200b включает стадии 210, 220, 230 и 240, описанные выше по отношению к способу 200а и показанные на фигуре 2А. Однако способ 200b также включает стадию 233, на которой измеряются текущие рабочие параметры, если TFM «достаточно равен» TFD, как определено на стадии принятия решения 230. Альтернативно или дополнительно, текущие рабочие параметры могут измеряться периодически или через заданные промежутки времени или в зависимости от других событий. Способ 200b также включает стадию 236, во время которой записываются рабочие параметры, измеренные на стадии 233. Рабочие параметры, записанные на стадии 236, могут использоваться в будущих вычислениях величины момента вращения полого вала, выполняемого на стадии 240, причем эти параметры могут быть определены одним или несколькими интеллектуальными адаптивными контроллерами, программируемыми логическими схемами, искусственными нейронными сетями и/или другими адаптивными и/или "обучаемыми" контроллерами или устройствами обработки данных.
Каждая из стадий способов 200а и 200b может быть выполнена автоматически. Например, контроллер 190, показанный на фигуре 1, может быть использован для автоматического выполнения сравнения скважинного инструмента на стадии 230 периодически, через случайные интервалы или иными образом. Контроллер 190 также может использоваться для автоматического формирования и передачи управляющих сигналов, направляющих вращение полого вала на стадии 240, например, в ответ на сравнение скважинного инструмента, выполняемого на стадиях 220 и 230.
На фигуре 3 представлена блок-схема устройства 300 согласно одному или несколькими объектам настоящего изобретения. Устройство 300 включает пользовательский интерфейс 305, оборудование ВНА 310, систему привода 315, лебедки 320 и контроллер 325. Устройство 300 может быть осуществлено в пределах окружающей среды и/или в пределах устройства, показанного на фигуре 1. Например, оборудование ВНА 310 может быть, в основном, подобно оборудованию ВНА 170, показанному на фигуре 1, система привода 315 может быть, в основном, подобна верхнему приводу 140, показанному на фигуре 1, лебедки 320 могут быть, в основном, подобны лебедкам 130, показанным на фигуре 1, и контроллер 325 может быть, в основном, подобен контроллеру 190, показанному на фигуре 1. Устройство 300 также может быть использовано в способе 200а, показанном на фигуре 2А, и/или в способе 200b, показанном на фигуре 2В, среди описанных здесь других способов или иными образом в рамках настоящего изобретения.
Пользовательский интерфейс 305 и контроллер 325 могут быть отдельными компонентами, которые связаны через проводные или беспроводные средства связи. Альтернативно пользовательский интерфейс 305 и контроллер 325 могут быть компонентами одной системы или контроллера 327, как показано пунктиром на фигуре 3.
Пользовательский интерфейс 305 включает средство 330 для ввода пользователем одной или нескольких заданных точек скважинного инструмента и также может включать средство для ввода пользователем других заданных точек, пределов и других входных данных. Средство ввода данных 330 может включать клавиатуру, устройство голосовой связи, шкалу, клавиатуру, выключатель, селекторный разъединитель, переключатель, джойстик, мышь, базу данных и/или другое обычное или разработанное в будущем устройство ввода данных. Такие средства ввода данных могут поддерживать ввод данных от местных и/или удаленных узлов. Альтернативно или дополнительно, средство ввода данных 330 может включать средства для выбора пользователем предопределенных значений температуры скважинного инструмента или диапазонов, например, через одно или нескольких падающих меню. Данные температуры скважинного инструмента могут также или альтернативно быть выбраны контроллером 325 путем выполнения одной или нескольких процедур поиска в базе данных. В целом, средство ввода данных 330 и/или другие компоненты в объеме настоящего изобретения поддерживают работу и/или контроль станций на участке буровой установки, так же как на одном или нескольких удаленных участках через линию связи с системой и локальную вычислительную сеть (местную сеть), глобальную сеть, Интернет, линию спутниковой связи и/или по радио среди других возможных средств связи.
Пользовательский интерфейс 305 также может включать дисплей 335, используемый для визуального представления информации пользователю виде текста, графики или видео. Дисплей 335 также может быть использован пользователем для ввода заданный значений скважинного инструмента в сочетании со средством ввода данных 330. Например, средство ввода заданных значений 330 скважинного инструмента может являться неотъемлемой частью дисплея 335 или иными образом связано с ним.
Оборудование ВНА 310 может включать датчик давления 340 в обсадной колонне MWD, который используется для определения значения давления в кольцевом пространстве или диапазон давления в части MWD ВНА 310, и он может быть, в основном, подобен датчику давления 170а, показанному на фигуре 1. Данные давления в обсадной колонне, измеренные датчиком давления в обсадной колонне MWD 340, можно послать в виде электронного сигнала в контроллер 325 через проводную или беспроводную линию связи.
Оборудование ВНА 310 также может включать ударный или вибрационный датчик MWD 345, который используется для обнаружения ударов и/или вибрации в оборудовании MWD ВНА 310, и он, в основном, может быть подобен ударному/вибрационному датчику 170b, показанному на фигуре 1. Данные удара/вибрации, обнаруженные через ударный или вибрационный датчик 345, можно послать в виде электронного сигнала в контроллер 325 через проводную или беспроводную линию связи.
Оборудование ВНА 310 также может включать датчик 350 перепада давления ΔР через гидравлический забойный двигатель, который используется для определения величины перепада давления или диапазона перепада давления через гидравлический забойный двигатель оборудования ВНА 310, и он, в основном, может быть подобен датчику 172а обнаружения перепада давления ΔР через гидравлический забойный двигатель. Датчик 350 перепада давления ΔР может послать электронный сигнала в контроллер 325 через проводную или беспроводную линию связи. Перепад давления ΔР гидравлического забойного двигателя может быть альтернативно или дополнительно вычислен, обнаружен или иными образом определен на поверхности, вычисляя разницу между поверхностным давлением стояка выше забоя и давлением в момент контакта бурового долота с дном забоя и начала его вращения при бурении.
Оборудование ВНА 310 также может включать магнитный датчик скважинного инструмента 355 и гравитационный датчик скважинного инструмента 360, которые вместе определяют текущий скважинный инструмент и которые вместе, в основном, могут быть подобны датчику скважинного инструмента 170с, показанного на фигуре 1. Магнитный датчик скважинного инструмента 355 может быть или включать обычный или разработанный в будущем магнитный датчик скважинного инструмента, который определяет ориентацию скважинного инструмента относительно магнитного северного или истинного северного полюса. Гравитационный датчик скважинного инструмента 360 может быть или включать обычный или разработанный в будущем гравитационный датчик скважинного инструмента, который определяет ориентацию скважинного инструмента относительно поля тяготения Земли. В примере осуществления изобретения магнитный датчик скважинного инструмента 355 может обнаружить текущий скважинный инструмент, когда конец ствола скважины отклоняется не более чем примерно на 7° от вертикали, и гравитационный датчик скважинного инструмента 360 может обнаружить текущий скважинный инструмента, когда конец ствола скважины отклоняется на величину более чем примерно 7° от вертикали. Однако в рамках настоящего изобретения также могут быть использованы другие датчики скважинного инструмента, включая немагнитные датчики скважинного инструмента и негравитационные датчики наклона. В любом случае, ориентацию скважинного инструмента, обнаруженную одним или несколькими датчиками скважинного инструмента (например, датчики 355 и/или 360), можно послать в виде электронного сигнала в контроллер 325 через проводную или беспроводную линию связи.
Оборудование ВНА 310 также может включать датчик крутящего момента MWD 365, который используется для определения величины или диапазона крутящего момента, приложенного к буровому долоту двигателем(ями) оборудования ВНА 310, и он, в основном может быть подобен датчику крутящего момента 172b, показанному на фигуре 1. Данные крутящего момента, обнаруженные датчиком крутящего момента MWD 365, можно послать в виде электронного сигнала в контроллер 325 через проводную или беспроводную линию связи.
Оборудование ВНА 310 также может включать датчик 370 MWD WOB, который используется для определения величины или диапазона значений для WOB вблизи оборудования ВНА 310, и этот датчик, в основном может быть подобно датчику 170d WOB, показанному на фигуре 1. Данные WOB, обнаруженные датчиком 370 MWD WOB, можно послать в виде электронного сигнала в контроллер 325 через проводную или беспроводную линию связи.
Лебедки 320 включают контроллер 390 и/или другие средства для подачи бурового каната (типа бурового каната 125, показанного на фигуре 1). Такая операция может включать направленную подачу (вниз и вверх) и управление скоростью подачи. Однако примеры осуществления изобретения включают и те варианты, в которых лебедки бурильной колонны с буровым канатом альтернативно могут иметь гидроцилиндр или шестеренчатый подъемник, где движение бурильной колонны вверх и вниз осуществляется через систему, отличную от лебедки. Бурильная колонна также может состоять из гибких насосно-компрессорных труб, когда движением бурильной колонны в скважину и из скважины управляет устьевая головка, которая захватывает и подает трубы в скважину и из скважины. Тем не менее, примеры осуществления изобретения могут включать вариант контроллера 390, и контроллер 390 может использоваться для управления подачей и/или извлечением бурильной колонны.
Система привода 315 включает поверхностный датчик крутящего момента 375, который используется для определения величины или диапазона реактивного крутящего момента полого вала или бурильной колонны, аналогично датчику крутящего момента 140а, показанного на фигуре 1. Система привода 315 также включает датчик 380 положения полого вала, который используется для определения величины или диапазона вращательного положения полого вала, например, относительно истинного северного полюса или другой неподвижной точки. Данные поверхностного скручивания и положения полого вала, обнаруженные датчиками 375 и 380, соответственно, можно послать в виде электронного сигнала в контроллер 325 через проводную или беспроводную линию связи. Система привода 315 также включает контроллер 385 и/или другие средства для управления вращательным положением, скоростью и направлением полого вала или другого компонента бурильной колонны, соединенного с системой привода 315 (например, полого вала 145, показанного на фигуре 1).
В примере осуществления изобретения система привода 315, контроллер 385 и/или другой компонент устройства 300 может включать средство учета трения между бурильной колонной и стволом скважины. Например, такое средство учета трения может быть использовано для обнаружения места и/или величины трения, которая может затем быть вычтена из фактического "реактивного" крутящего момента, возможно контроллером 385 и/или другим компонентом управления устройства 300.
Контроллер 325 сконфигурирован для приема одного или нескольких вышеописанных параметров от интерфейса пользователя 305, оборудования ВНА 310 и/или от системы привода 315 и использует такие параметры непрерывно, периодически или иными образом для определения текущей ориентации скважинного инструмента. Контроллер 325 также может использоваться для формирования управляющего сигнала, например, через схему интеллектуального адаптивного управления, и для формирования управляющего сигнала для системы привода 315 и/или лебедки 320, чтобы настроить или поддержать ориентацию скважинного инструмента. Например, контроллер 325 может выполнить способ 202, показанный на фигуре 2В, чтобы передать один или несколько сигналов систему привода 315 и/или лебедки 320 для увеличения или уменьшения нагрузки WOB и/или изменения положения полого вала с тем, чтобы точно "управлять" операцией бурения.
Кроме того, как и в примере осуществления изобретения, изображенном на фигуре 3, контроллер 385 системы привода 315 и/или контроллер 390 лебедок 320 может использоваться для формирования и передачи сигнала на контроллер 325. Следовательно, контроллер 385 системы привода 315 может быть использован для управления оборудованием ВНА 310 и/или лебедки 320, чтобы помочь в достижении и/или поддержании желательной ориентации скважинного инструмента. Точно так же, контроллер 390 лебедок 320 может быть использован для управления оборудованием ВНА 310 и/или системой привода 315, чтобы помочь в достижении и/или поддержании желательной ориентации скважинного инструмента. Альтернативно или дополнительно, контроллер 385 системы привода 315 и контроллер 390 лебедок 320 может использоваться для непосредственной связи, например, как показано двойной стрелкой 392 на фигуре 3. Следовательно, контроллер 385 системы привода 315 и контроллер 390 лебедок 320 могут использоваться совместно для получения и/или поддержания желательной ориентации скважинного инструмента. Такое взаимодействие может быть независимым от управления, обеспечиваемого контроллером 325 и/или оборудованием ВНА 310.
На фигуре 4А представлена схема, по меньшей мере, части устройства 400а согласно одному аспекту настоящего изобретения. Устройство 400а является примерным выполнением устройства 100, показанного на фигуре 1, и/или устройства 300, показанного на фигуре 3, и примерной окружающей средой, в которой может быть выполнен способ 200а, показанный на фигуре 2А, и/или способ 200b, показанный на фигуре 2В. Устройство 400а включает множество входов пользователя 410 и, по меньшей мере, один процессор 420. Входы пользователя 410 включают ограничение крутящего момента полого вала 410а по максимуму, ограничение крутящего момента полого вала 410b по минимуму, ограничение скорости полого вала 410с по максимуму, ограничение скорости полого вала 410d по минимуму, ограничение колебаний полого вала 410а по максимуму, ограничение колебаний полого вала 410f по минимуму, нейтральную точку колебания полого вала 410g и вход 410h ориентации скважинного инструмента. Однако в других примерах осуществления настоящего изобретения могут использоваться дополнительные или альтернативные входы пользователя 410. Входы пользователя 410, в основном, могут быть аналогичны входу пользователя 330 или другим компонентам соединений пользователя 305, показанным на фигуре 3. По меньшей мере, один процессор 420 может формировать, по меньшей мере, часть контроллера 325, показанного на фигуре 3,и/или контроллера 385 из системы привода 315, показанного на фигуре 3, или быть сформированным, по меньшей мере, частью этого контроллера.
В примере осуществления изобретения, изображенном на фигуре 4А, по меньшей мере, один процессор 420 включает контроллер 420а скважинного инструмента и контроллер лебедок 420b, и устройство 400а также включает множеством датчиков 430 или иными образом связано с указанными датчиками. Множество датчиков 430 включает датчик крутящего момента долота 430а, датчик крутящего момента полого вала 430b, датчик скорости полого вала 430с, датчик положения полого вала 430d, датчик 430е гидравлического забойного двигателя ΔР и датчик ориентации скважинного инструмента 430f. В других примерах осуществления настоящего изобретения могут использоваться дополнительные или альтернативные датчики 430. В примере осуществления изобретения каждый из множества датчиков 430 может быть расположен на поверхности ствола скважины, а не в забое около бурового долота, в оборудовании ВНА, и/или в любом инструментальном средстве во время каротажа при бурении. Однако в других примерах осуществления один или несколько датчиков 430 могут быть расположены не на поверхности. Например, в одном примере осуществления изобретения датчик крутящего момента полого вала 430b, датчик скорости полого вала 430с и датчик положения полого вала 430d могут быть поверхностными датчиками, тогда как датчик крутящего момента 430а бурового долота, датчик 430е гидравлического забойного двигателя ΔР и датчик ориентации скважинного инструмента 430f могут быть скважинными датчиками (например, датчиками MWD). Кроме того, отдельные датчики 430 могут быть, в основном, подобны соответствующим датчикам, показанным на фигуре 1 или фигуре 3.
Устройство 400а также включает двигатель полого вала 440 или связано с ним. Двигатель полого вала 440 может формировать, по меньшей мере, часть верхнего привода или другой системы привода, например верхний привод 140, показанный на фигуре 1, и/или систему привода 315, показанную на фигуре 3. Двигатель полого вала 440 принимает управляющий сигнал двигателя полого вала, по меньшей мере, от одного процессора 420, если он также не передается другими компонентами устройства 400а. Управляющий сигнал двигателя полого вала управляет положением (например, азимутом), направлением вращения, скоростью вращения и/или колебанием полого вала. Контроллер скважинного инструмента 420а используется для формирования управляющего сигнала двигателя полого вала, используя данные, полученные от входов пользователя 410 и датчиков 430.
Контроллер 420а скважинного инструмента может сравнивать фактический крутящий момент полого вала с максимальным значением крутящего момента полого вала, полученным от соответствующего ввода пользователя 410а. Фактический крутящий момент полого вала может быть определен, используя данные, полученные от датчика крутящего момента полого вала 430b. Например, если фактический крутящий момент полого вала превышает максимальное значение крутящего момента полого вала, то управляющий сигнал двигателя полого вала может восстановить рабочее значение крутящего момента полого вала 440. В примере осуществления изобретения контроллер 420а скважинного инструмента может быть использован для оптимизации параметров при операции бурения в связи с фактическим крутящим моментом полого вала, например, увеличивая фактический крутящий момент полого вала до максимальной величины, не превышая ограничения крутящего момента полого вала по максимуму.
Альтернативно или дополнительно контроллер 420а скважинного инструмента может сравнивать фактический крутящий момент полого вала с минимальным крутящим моментом полого вала, полученным из соответствующего ввода пользователя 410b. Например, если фактический крутящий момент полого вала отклоняется ниже предела по минимуму, управляющий сигнал двигателя полого вала может служить командой на увеличение крутящего момента полого вала 440. В примере осуществления изобретения контроллер 420а скважинного инструмента может быть использован для оптимизации параметров операции бурения, связанных с фактическим крутящим моментом полого вала, например, снижая до минимума фактический крутящий момент полого вала, не доводя до точки ограничения крутящего момента полого вала.
Альтернативно или дополнительно контроллер 420а скважинного инструмента может сравнивать фактическую скорость полого вала с пределом ограничения по максимуму, полученным от соответствующего ввода пользователя 410с. Фактическая скорость полого вала может быть определена, используя данные, полученные от датчика скорости полого вала 430с. Например, если фактическая скорость полого вала превышает предельное значение скорости полого вала, то управляющий сигнал двигателя полого вала может восстановить нормальную скорость полого вала 440. В примере осуществления изобретения контроллер 420а скважинного инструмента может быть использован для оптимизации параметров операции бурения, связанных с фактической скоростью полого вала, в частности, увеличивая фактическую скорость полого вала, не превышая установленного предела скорости полого вала по максимуму.
Альтернативно или дополнительно контроллер 420а скважинного инструмента может сравнивать фактическую скорость полого вала с пределом скорости полого вала, полученным от соответствующего ввода пользователем 410d. Например, если фактическая скорость полого вала отклоняется на величину ниже предела ограничения скорости полого вала, управляющий сигнал двигателя полого вала может увеличить скорость полого вала 440. В примере осуществления изобретения контроллер 420а скважинного инструмента может быть использован для оптимизации параметров операции бурения, связанных с фактической скоростью полого вала, например, снижая до минимума фактическую скорость полого вала, не превышая предела скорости полого вала по максимуму.
Альтернативно или дополнительно контроллер 420а скважинного инструмента может сравнивать фактическую ориентацию (азимут) полого вала с колебанием полого вала с пределом по максимуму, полученным от соответствующего ввода пользователя 410е. Фактическая ориентация полого вала может быть определена, используя данные, полученные от датчика положения полого вала 430d. Например, если фактическая ориентация полого вала превышает колебание полого вала с ограничением по максимуму, то управляющий сигнал двигателя полого вала может восстановить колебания полого вала 440 в пределах колебания полого вала с ограничением по максимуму или изменять параметры колебания полого вала таким образом, что фактическое колебание полого вала в положительном направлении (например, по часовой стрелке) не превышает колебание полого вала с ограничением по максимуму. В примере осуществления изобретения контроллер 420а скважинного инструмента может быть использован для оптимизации параметров операции бурения, связанных с фактическим колебанием полого вала, например, увеличивая величину фактического колебания полого вала в положительном направлении, не превышая ограничения колебаний полого вала по максимуму.
Альтернативно или дополнительно контроллер 420а скважинного инструмента может сравнивать фактическую ориентацию полого вала с пределом отклонения полого вала по минимуму, полученным от соответствующего ввода пользователя 410f. Например, если фактическая ориентация полого вала отклоняется ниже предела колебаний полого вала, управляющий сигнал двигателя полого вала может направить вращение полого вала 440 в пределы ограничения колебаний полого вала или изменить параметры колебания полого вала таким образом, что фактическое колебание полого вала в отрицательном направлении (например, против часовой стрелки) не превысит предела колебаний полого вала по минимуму. В примере осуществления изобретения контроллер 420а скважинного инструмента может быть использован для оптимизации параметров операции бурения, связанных с фактическим колебанием полого вала, например, увеличивая фактическую величину колебания полого вала, не превышая предела колебаний полого вала по минимуму.
Альтернативно или дополнительно контроллер 420а скважинного инструмента может сравнивать фактическую нейтральную точку колебания полого вала с желательным колебанием полого вала входа нейтральной точки, полученную от соответствующего ввода пользователя 410g. Фактическая нейтральная точка колебания полого вала может быть определена, используя данные, полученные от датчика положения полого вала 430d. Например, если фактическая нейтральная точка колебания полого вала изменяется от желательного значения нейтральной точки колебания полого вала на предопределенную величину или падает за пределы желательного диапазона колебаний, то управляющий сигнал двигателя полого вала может изменить параметры колебания полого вала 440, чтобы осуществить соответствующую коррекцию.
Альтернативно или дополнительно контроллер 420а скважинного инструмента может сравнивать фактическую ориентацию скважинного инструмента с величиной ориентации скважинного инструмента, полученной от соответствующего входа пользователя 410h. Вход ориентации скважинного инструмента, полученный от входа пользователя 410h, может быть единственным значением, указывающим на желательную ориентацию скважинного инструмента. Например, если фактическая ориентация скважинного инструмента отличается от входного значения ориентации скважинного инструмента на предопределенную величину, то управляющий сигнал двигателя полого вала может заставить полый вал 440 вращаться на величину, соответствующую необходимую для коррекции ориентации скважинного инструмента. Однако входная величина ориентации скважинного инструмента, полученная от входа пользователя 410h, может альтернативно быть диапазоном, в пределах которого была бы сохранена желательная ориентация скважинного инструмента. Например, если фактическая ориентация скважинного инструмента выходит из диапазона входной ориентации скважинного инструмента, управляющий сигнал двигателя полого вала может повернуть полый вал 440 на величину, необходимую для коррекции фактической ориентации скважинного инструмента в пределах входного диапазона ориентации скважинного инструмента. В одном примере осуществления изобретения фактическая ориентация скважинного инструмента сравнивается с входной ориентацией скважинного инструмента автоматически, возможно на основании предопределенного и/или постоянно обновляемого плана скважины (например, "проект обслуживания скважины"), возможно принимая во внимание ошибку при проходке скважины в ходе буровых работ.
В каждом из вышеупомянутых сравнений и/или вычислений, выполненных контроллером скважинного инструмента, фактический перепад давления ΔР гидравлического забойного двигателя и/или фактический крутящий момент бурового долота также могут быть использованы при формировании сигнала привода полого вала. Фактический перепад давления ΔР гидравлического забойного двигателя может быть определен используя данные, полученные от датчика 430е ΔР гидравлического забойного двигателя, и/или измеряя давление насоса прежде, чем буровое долото достигнет дна забоя, и измеряя эту величину, и фактический крутящий момент бурового долота может быть определен используя данные, полученные от датчика крутящего момента 430а бурового долота. Альтернативно фактический крутящий момент бурового долота может быть вычислен, используя данные перепада давления (ΔР), полученные от датчика 430е гидравлического забойного двигателя, потому что фактический крутящий момент бурового долота и фактический ΔР гидравлического забойного двигателя пропорциональны.
Один пример, в котором фактический ΔР гидравлического забойного двигателя и/или фактический крутящий момент бурового долота могут быть использованы в том случае, когда на фактическую ориентацию скважинного инструмента нельзя положиться, чтобы получить точные или получить достаточно быстро. Например, это может иметь место во время бурения с потерей циркуляции или в других примерах, в которых бурильщик больше не получает данные от датчика ориентации скважинного инструмента 430f. В таких случаях фактический крутящий момент бурового долота и/или фактический ΔР гидравлического забойного двигателя может быть использован для определения фактической ориентации скважинного инструмента. Например, если все другие параметры бурения остаются тем же самыми, изменение во крутящем моменте фактического бурового долота и/или фактического гидравлического забойного двигателя ΔР может указать на пропорциональное вращение ориентации скважинного инструмента в направлении бурения или в противоположном направлении. Например, увеличивающийся крутящий момент долота или ΔР может указать на то, что вращение скважинного инструмента изменяется в направлении, противоположном направлению бурения, тогда как уменьшающийся крутящий момент долота или падающий ΔР может указать на то, что скважинный инструмент вращается в направлении бурения. Таким образом, данные, полученные от датчика крутящего момента 430а бурового долота, и/или от датчика 430е ΔР гидравлического забойного двигателя, могут быть использованы контроллером скважинного инструмента 420 при формировании сигнала двигателя полого вала с тем, чтобы полый вал можно было вращать с возможностью коррекции или учитывать любое вращение бурового долота, которое обозначено изменением фактического крутящего момента бурового долота и/или фактического ΔР гидравлического забойного двигателя.
Кроме того, при некоторых условиях эксплуатации данные, полученные контроллером 420 скважинного инструмента от датчика ориентации скважинного инструмента 430f, могут отставать от фактической ориентации скважинного инструмента. Например, датчик ориентации скважинного инструмента 430f может только периодически определять фактическую ориентацию скважинного инструмента, или может потребоваться значительный промежуток времени для передачи данных от скважинного инструмента на поверхность. Как правило, в системах известного уровня техники такая задержка составляет 30 секунд и более. Следовательно, в некоторых применениях по настоящему изобретению может оказаться более точным или иными образом более выгодным для контроллера 420а скважинного инструмента использовать фактический крутящий момент и данные давления, полученные от датчика крутящего момента 430а бурового долота и датчика 430е ΔР гидравлического забойного двигателя в дополнение к использованию фактических данных скважинного инструмента, полученных от датчика ориентации 430f скважинного инструмента.
Как показано на фигуре 4А, входы пользователя 410 устройства 400а также могут включать тарировку WOB 410i, тарировку перепада давления ΔР 410j гидравлического забойного двигателя, вход 410k ROP, вход 410l WOB, вход 410м гидравлического забойного двигателя и ограничитель нагрузки на крюке 410n. При этом по меньшей мере, один процессор 420 также может включать контроллер лебедок 420b. Множество датчиков 430 устройства 400а также может включать датчик нагрузки на крюке 430g, датчик давления бурового насоса 430h, датчик глубины долота 430i, датчик давления в обсадной колонне 430j и датчик ROP 430k. Каждое множество датчиков 430 может быть расположено на поверхности ствола скважины, в забое скважины (например, MWD) или в другом пространстве.
Как описано выше, контроллер 420а скважинного инструмента используется для формирования управляющего сигнала полого вала, используя данные, полученные от входов пользователя 410 и датчиков 430, и затем формирует управляющий сигнал для полого вала привода 440, управляя, таким образом, ориентацией скважинного инструмента, путем регулирования ориентации и скорости вращения полого вала. Таким образом, управляющий сигнал двигателя полого вала используется для управления (по меньшей мере, частично) ориентацией полого вала (например, азимутом) так же, как и скоростью и направлением вращения полого вала (если таковой используется).
Контроллер лебедок 420b используется для формирования управляющего сигнала для барабана лебедок (или тормоза), также используя данные, полученные от входов пользователя 410 и датчиков 430. Затем, контроллер лебедок 420b обеспечивает управляющий сигнал для привода лебедок 450, управляя, таким образом, направлением подачи и скоростью лебедок. Привод лебедок 450 может формировать, по меньшей мере, часть, или может быть сформирован, по меньшей мере, частью, лебедки 130, показанной на фигуре 1, и/или лебедки 320, показанной на фигуре 3. Объем настоящего изобретения также включает другие средства регулирования вертикального положения бурильной колонны. Например, контроллер лебедок 420b может быть контроллером лебедки, а привод лебедок 450 может включать средства для подъема бурильной колонны вместо или в дополнение к системе лебедок (например, реечно-шестеренчатый подъемник).
Устройство 400а также включает компаратор 420с, который сравнивает текущие данные нагрузки на крюке с тарировкой WOB, чтобы получить величину текущей нагрузки на долото. Данные текущей нагрузки на крюке передаются датчиком нагрузки на крюке 430g, а нагрузка WOB получается от соответствующего ввода пользователя 410i.
Контроллер лебедок 420b сравнивает текущую нагрузку на долото с входными данными нагрузки на долото. Текущая нагрузка на долото принимается от компаратора 420с, и входные данные нагрузки на долото получаются от соответствующего ввода пользователя 410l. Входные данные нагрузки на долото, полученные от ввода пользователя 410l, могут быть единственной величиной, указывающей на желательную нагрузку. Например, если фактическая нагрузка на долото отличается от входной нагрузки на предопределенную величину, то управляющий сигнал привода лебедок может инициировать движение каната лебедки 450 вниз или вверх, чтобы получить величину, соответствующую необходимому исправлению WOB. Однако входные данные нагрузки на долото, полученные от ввода пользователя 410l, могут альтернативно быть диапазоном, в пределах которого желательно поддерживать нагрузку на долото. Например, если фактическая нагрузка на долото вне входного диапазона нагрузки на долото, то управляющий сигнал привода лебедок может инициировать перемещение каната лебедки 450 вниз или вверх на величину, необходимую для коррекции фактической нагрузки на долото в пределах входного диапазона нагрузки на долото. В примере осуществления изобретения контроллер лебедок 420b может быть использован для оптимизации параметров операции бурения, связанных с WOB, например, увеличивая фактическую нагрузку на долото, не превышая входное значения WOB или диапазона.
Устройство 400а также включает компаратор 420d, который сравнивает данные давления бурового насоса с тарировкой ΔР гидравлического забойного двигателя, чтобы сформировать "неоткорректированный" перепад давления ΔР гидравлического забойного двигателя. Данные давления бурового насоса принимаются от датчика давления 430h бурового насоса, и тарировка ΔР гидравлического забойного двигателя принимается от соответствующего входа пользователя 410j.
Устройство 400а также включает компаратор 420е, который использует неоткорректированные данные ΔР гидравлического забойного двигателя наряду с данными глубины долота и данными давления в обсадной колонне, чтобы сформировать "скорректированный" или текущий перепад давления ΔР гидравлического забойного двигателя. Данные глубины долота принимаются от датчика глубины долота 430i, и данные давления в обсадной колонне принимаются от датчика давления в обсадной колонне 430j. Датчик давления в обсадной колонне 430j может быть датчиком кондукторной обсадной колонны, таким как датчик 159, показанный на фигуре 1, и/или скважинным датчиком давления в обсадной колонне, например, датчик 170а, показанный на фигуре 1, и может детектировать давление в кольцевом пространстве, между обсадной трубой или диаметром ствола скважины и компонентом бурильной колонны.
Контроллер лебедок 420b сравнивает текущий перепад давления ΔР гидравлического забойного двигателя с входными данными ΔР гидравлического забойного двигателя. Текущий перепад давления ΔР гидравлического забойного двигателя принимается от компаратора 420е, а входные данные перепада давления ΔР гидравлического забойного двигателя принимаются от соответствующего входа пользователя 410m. Входные данные перепада давления ΔР гидравлического забойного двигателя, полученные от входа пользователя 410m, могут быть единственной величиной, указывающей на желательный ΔР гидравлического забойного двигателя. Например, если текущий перепад давления ΔР гидравлического забойного двигателя отличается от ΔР гидравлического забойного двигателя на предопределенную величину, управляющий сигнал привода лебедок может инициировать перемещение каната лебедки 450 вниз или вверх на величину, соответствующую необходимой коррекции ΔР. Однако входные данные ΔР гидравлического забойного двигателя, полученные от входа пользователя 410m, могут альтернативно быть диапазоном, в пределах которого желательно поддерживать ΔР гидравлического забойного двигателя. Например, если текущий перепад давления ΔР гидравлического забойного двигателя находится вне этого диапазона, то управляющий сигнал привода лебедок может инициировать перемещение каната лебедки 450 вниз или вверх на величину, необходимую для восстановления текущего перепада давления ΔР в пределах входного диапазона. В примере осуществления изобретения контроллер лебедок 420b может быть использован для оптимизации параметров операции бурения, связанных с ΔР гидравлического забойного двигателя, например, увеличивая ΔР гидравлического забойного двигателя, не превышая входной величины или диапазона.
Контроллер лебедок 420b также может сравнивать фактические данные ROP с входными данными ROP. Фактические данные ROP принимаются от датчика ROP 430k,
и входные данные ROP принимаются от соответствующего входа пользователя 410k. Входные данные ROP, полученные от входа пользователя 410k, могут быть единственным величиной, указывающей на желательную величину ROP. Например, если фактическая скорость ROP отличается от входной ROP на предопределенную величину, то управляющий сигнал привода лебедок может инициировать перемещение каната лебедки 450 вниз или вверх на величину, соответствующую необходимой коррекции ROP. Однако входные данные ROP, полученные от входа пользователя 410k, могут альтернативно быть диапазоном, в пределах которого желательно поддерживать механическую скорость проходки. Например, если фактическая скорость ROP находится вне входного диапазона ROP, то управляющий сигнал привода лебедок может инициировать перемещение каната лебедки 450 вниз или вверх на величину, необходимую для восстановления фактический ROP в пределах входного диапазона ROP. В примере осуществления изобретения контроллер лебедок 420b может быть использован для оптимизации параметров операции бурения, связанных с ROP, например, увеличивая фактическую ROP, не превышая входное значение ROP или диапазон.
Контроллер лебедок 420b также может использовать данные, полученные от контроллера 420а скважинного инструмента, когда формируется управляющий сигнал лебедок. Изменения фактической нагрузки на долото могут вызвать изменения фактического крутящего момента долота, фактического перепада давления ΔР гидравлического забойного двигателя и фактической ориентации скважинного инструмента. Например, по мере увеличения веса, приложенного к буровому долоту, фактическая ориентация скважинного инструмента может вращаться против направления бурения, и фактический крутящий момент бурового долота и давление гидравлического забойного двигателя могут пропорционально увеличиться. Следовательно, контроллер 420а скважинного инструмента может выдать данные контроллеру лебедок 420b с указанием, должен ли буровой канат лебедок быть подан вверх или вниз, и возможно необходимую скорость подачи, для приведения фактической ориентации скважинного инструмента в соответствие с входной величиной ориентации или диапазоном, предоставленным соответствующим входом пользователя 410h. В примере осуществления изобретения контроллер лебедок 420b также может обеспечить передачу данных контроллеру 420а скважинного инструмента, чтобы вращать полый вал по часовой стрелке или против часовой стрелки на величину и/или со скоростью, достаточной, чтобы компенсировать увеличенную или уменьшенную WOB, глубину долота или давление в обсадной колонне.
Как показано на фигуре 4А, входы пользователя 410 могут также включать вход предела тягового усилия 410n. Когда формируется управляющий сигнал лебедок, контроллер лебедок 420b может быть использован как гарант того, что лебедки не превысят предельное значение тягового усилия на величину, полученную от входа пользователя 410n. Предельное значение тягового усилия также известно как ограничитель нагрузки на крюке и может зависеть от конкретной конфигурации буровой установки среди других параметров.
В примере осуществления изобретения контроллер лебедок 420b также может обеспечить данные контроллеру 420а скважинного инструмента, чтобы инициировать контроллер 420а скважинного инструмента на подачу сигнала на вращение полого вала, например, по величине, направлению и/или скорости, достаточной, чтобы компенсировать достигнутое предельное значение тягового усилия, или превышение этого предела. Контроллер 420а скважинного инструмента также может обеспечить передачу данных контроллеру лебедок 420b, чтобы заставить контроллер лебедок 420b
увеличить или уменьшить WOB, или регулировать подачу бурильной колонны, например, на величину, направление, и/или скорости, достаточной, чтобы соответственно отрегулировать ориентацию скважинного инструмента.
На фигуре 4В представлена схема, по меньшей мере, части другого примера осуществления устройства 400а, определяемая здесь цифровым обозначением 400b. Подобно устройству 400а, устройство 400b является примерным выполнением устройства 100, показанного на фигуре 1, и/или устройства 300, показанного на фигуре 3, и примерной окружающей средой, в которой может быть реализован способ 200а, показанный на фигуре 2А, и/или способ 200b, показанный на фигуре 2В.
Подобно устройству 400а, устройство 400b включает множество входов пользователя 410 и, по меньшей мере, один процессор 420. По меньшей мере, один процессор 420 включает контроллер 420а скважинного инструмента и контроллер лебедок 420b, описанный выше, а также контроллер 420с бурового насоса. Устройство 400b также включает или иными образом связано с множеством датчиков 430, приводом полого вала 440 и приводом лебедки 450, подобно устройству 400а. Устройство 400b также включает или иными образом связано с приводом бурового насоса 460, который используется для работы бурового насоса, например бурового насоса 180, показанного на фигуре 1. В примере осуществления изобретения в устройстве 400b, показанном на фигуре 4В, каждый из множества датчиков 430 может быть расположен на поверхности ствола скважины, в забое скважины (например, как элемент оборудования MWD), или в другом пространстве.
Контроллер 420с бурового насоса используется для формирования управляющего сигнала привода бурового насоса, используя данные, полученные от входа пользователя 410 и датчика 430. Затем, контроллер 420с бурового насоса обеспечивает управляющий сигнал привода 460 бурового насоса, управляя, таким образом, скоростью, расходом и/или давлением бурового насоса. Контроллер 420с бурового насоса может формировать, по меньшей мере, часть или может быть сформирован, по меньшей мере, частью, контроллера 190, показанного на фигуре 1, и/или контроллера 325, показанного на фигуре 3.
Как описано выше, перепад давления ΔР гидравлического забойного двигателя может быть пропорционален или иными образом связан с ориентацией скважинного инструмента, нагрузкой на долото и/или крутящим моментом долота. Следовательно, контроллер 420с бурового насоса может быть использован для воздействия на фактическую величину ΔР гидравлического забойного двигателя, чтобы помочь в обеспечении фактической ориентации скважинного инструмента в соответствии с величиной входной ориентации скважинного инструмента или диапазоном, установленным соответствующим пользовательским входом. Такая операция контроллера 420с бурового насоса может выполняться независимо от операции контроллера 420а скважинного инструмента и контроллера лебедок 420b. Альтернативно, как показано двойными стрелками 462 на фигуре 4В, операция контроллера 420с бурового насоса для установки желательной ориентации скважинного инструмента может быть выполнена во взаимодействии с контроллером 420а скважинного инструмента и контроллером лебедок 420b.
Контроллеры 420а, 420b, и 420с, показанные на фигурах 4А и 4В, каждый может быть или включать интеллектуальные или безмодельные адаптивные контроллеры, например, поставляемые фирмой CyberSift, General Cybernation Group, Inc. Все контроллеры 420а, 420b и 420с также могут быть установлены или независимо осуществлены на любом обычном или разработанном в будущем вычислительном устройстве, таком как один или несколько персональных компьютеров или серверов, переносных устройствах, системах PLC, и/или универсальных ЭВМ.
На фигуре 5А представлена блок-схема способа 500а согласно одному или нескольким объектам настоящего изобретения. Способ 500а может быть осуществлен во взаимодействии с одним или несколькими компонентами устройства 100, показанного на фигуре 1, во время работы устройства 100. Например, способ 500а может быть выполнен, чтобы оптимизировать эффективность бурения во время операции бурения, выполняемой с помощью устройства 100.
Способ 500а включает стадию 502, во время которой параметры для вычисления механической удельной энергии (MSE) определяются, собираются или получаются иными образом. Эти параметры могут называться здесь параметрами MSE. Параметры MSE включают статические и динамические параметры. Таким образом, некоторые параметры MSE изменяются, в основном, непрерывно. Эти динамические параметры MSE включают нагрузку на долото (WOB), частоту вращения долота (RPM), крутящий момент бурильной колонны (TOR) и механическую скорость проходки (ROP) бурового долота через проходимую породу. Другие параметры MSE изменяются редко, например, при подъеме колоны из скважины, при встрече с породой нового типа и при замене бурового долота среди прочих событий. Эти статические параметры MSE включают максимальную эффективную норму (MER) и диаметр бурового долота (DIA).
Параметры MSE могут быть получены, в основном, или полностью автоматически без использования входа пользователя. Например, во время первой итерации по стадиям способа 500а, причем статические параметры MSE могут быть восстановлены через автоматический запрос базы данных. Следовательно, во время последующих итераций статические параметры MSE, возможно, не потребуют повторного поиска, например, там, где тип бурового долота или данные формирования не изменились от предыдущего повторения способа 500а. Следовательно, выполнение стадии 502, во многих итерациях, может потребовать только обнаружения динамических параметров MSE. Обнаружение динамических параметров MSE может быть выполнено во взаимодействии с множеством датчиков, таких как датчики, показанные на фигурах 1, 3, 4А и/или 4В.
Последующая стадия 504 в способе 500а включает вычисление MSE. В примере осуществления изобретения MSE вычисляется по следующей формуле:
MSE=MER×[(4×WOB)/(n×DIA2)+(480×RPM×TOR)/(ROP×DIA2)]
где:
MSE = механическая удельная энергия (фунты на квадратный дюйм);
MER = механическая отдача (коэффициент);
WOB = нагрузка на долото (фунты);
DIA = диаметр долота (дюймы);
RPM = частота вращения долота (RPM);
TOR = крутящий момент бурильной колонны (футо-фунты);
ROP = скорость проходки (футы в час).
MER также может упоминаться как коэффициент полезного действия бурового долота. В примере осуществления изобретения MER равняется 0,35. Однако MER может измениться на основании одного или нескольких различных условий, таких как тип бурового долота, тип породы и/или другие факторы.
Способ 500а также включает стадию принятия решения 506, во время которой MSE, вычисленная во время предыдущей стадии 504, сравнивается с идеальной MSE. Идеальная MSE, используемая для сравнения на стадии принятия решения 506, может быть единственной величиной, такой как 100%. Альтернативно идеальная MSE, используемая для сравнения на стадии принятия решения 506, может быть целевым диапазоном значений, например, 90-100%. Альтернативно идеальная MSE может быть диапазоном величин, полученных из первого анализа пробуренного пласта, который состоит из различных пород, прошедших в текущей операции.
Если на стадии 506 определено, что MSE, вычисленная на стадии 504, равна идеальной MSE, или попадает в идеальный диапазон MSE, способ 500а может быть повторен, снова выполняя стадию 502. Однако если на стадии 506 определено, что расчетная MSE не равна идеальной MSE, или не попадает в идеальный диапазон MSE, выполняется дополнительная стадия 508. На стадии 508 один или несколько рабочих параметров настраиваются с намерением приблизить MSE к идеальному значению MSE или в пределах идеального диапазона MSE. Например, на фигурах 1 и 5А, все совместно выполненые стадии 508 могут включать увеличение или уменьшение WOB, RPM и/или TOR, передавая управляющий сигнал от контроллера 190 на верхний привод 140 и/или на лебедку 130, чтобы изменить скорость вращения, TOR и/или WOB. После выполнения стадии 508 способ 500а может быть возобновлен, повторяя стадию 502.
Каждая из стадий способа 500а может быть выполнена автоматически. В частности, автоматизированное определение динамических параметров MSE и поиск базы данных статических параметров MSE уже были описаны выше по отношению к стадии 502. Контроллер 190 из фигуры 1 (и другие описанные здесь компоненты) может использоваться для автоматического вычисления MSE на стадии 504, и также может использоваться для выполнения автоматического сравнения MSE на стадии принятия решения 506, где вычисление MSE и сравнение могут выполняться периодически, через случайные интервалы или иными образом. Контроллер также может использоваться для автоматического формирования и передачи управляющих сигналов на стадии 508, например, в ответ на сравнение MSE на стадии 506.
На фигуре 5В представлена блок-схема устройства 590 согласно одному или несколькими объектам настоящего изобретения. Устройство 590 включает пользовательский интерфейс 592, лебедки 594, систему привода 596 и контроллер 598. Устройство 590 может быть осуществлено в пределах окружающей среды и/или устройства, показанного на фигурах 1, 3, 4А и/или 4В. Например, лебедки 594 могут быть, в основном, подобны лебедкам 130, показанным на фигуре 1, система привода 596, в основном, может быть подобна верхнему приводу 140, показанному на фигуре 1, и/или контроллер 598, в основном, может быть подобен контроллеру 190, показанному на фигуре 1. Устройство 590 также может быть использовано при выполнении способа 200а, показанного на фигуре 2А, способа 200b, показанного на фигуре 2В, и/или способа 500а, показанного на фигуре 5А.
Пользовательский интерфейс 592 и контроллер 598 могут быть отдельными компонентами, которые соединены через проводные или беспроводные средства связи. Однако альтернативно пользовательский интерфейс 592 и контроллер 598 могут быть отдельными компонентами одной системы 599, как показано на фигуре 5В.
Пользовательский интерфейс 592 включает средство 592а для ввода пользователем одного или нескольких предопределенных данных эффективности (например, MER), величин и/или диапазонов, и средство 592b для ввода пользователем одного или нескольких предопределенных диаметров бурового долота (например, DIA). Каждое из средств ввода данных 592а и 592b может включать клавиатуру, устройство голосовой идентификации, шкалу, клавиатуру, выключатель, джойстик, мышь, базу данных (например, с информацией об отклонении) и/или другое обычное или разработанное в будущем устройство ввода данных. Такие средства ввода данных могут поддерживать ввод данных от местных и/или удаленных терминалов. Альтернативно или дополнительно, средства ввода данных 592а и/или 592b могут включать средства для выбора пользователем предопределенных значений MER и значений DIA или диапазонов, например, с помощью одного или нескольких падающих меню. Данные MER и DIA также могут быть выбраны контроллером 598 через выполнение одной или нескольких процедур поиска в базе данных. В целом, средства ввода данных и/или другие компоненты в рамках настоящего изобретения могут поддерживать операции системы при выполнении и/или контроле от станций на участке буровой установки, также с одного или нескольких удаленных терминалов с линией связи к системе, сети, локальной вычислительной сети (LAN), региональной сети (WAN) глобальной сети, Интернет и/или радио среди других средств.
Пользовательский интерфейс 592 также может включать дисплей 592с для визуального представления информации пользователю в текстовом, графическом или видеоформате. Дисплей 592с также может быть использован пользователем для ввода данных MER и DIA в сочетании со средствами ввода данных 592а и 592b. Например, средства ввода данных 592а, и 592b о предопределенной производительности и диаметре бурового долота могут быть неотъемлемой частью дисплея 592с или соединенными с ним устройствами.
Лебедки 594 включают датчик ROP 594а, который используется для определения величины или диапазона ROP и, в основном, может быть подобен датчику ROP 130а, показанному на фигуре 1. Данные ROP, обнаруженные датчиком ROP 594а, можно послать в виде электронного сигнала в контроллер 598 через проводную или беспроводную линию связи. Лебедки 594 также включают цепь управления 594b и/или другие средства для управления подачей и/или выборкой бурового каната (например, бурового каната 125, показанного на фигуре 1).
Система привода 596 включает датчик крутящего момента 596а, который используется для определения величины или диапазона реактивного скручивания бурильной колонны (например, TOR), почти так же, как и датчик крутящего момента 140а бурильной колонны 155, показанный на фигуре 1. Система привода 596 также включает датчик частоты вращения долота 596b, который используется для определения величины или диапазона частоты вращения бурового долота в стволе скважины (например, в оборотах в минуту), почти так же, как и датчик частоты вращения 140b, бурового долота 175 в стволе скважины 160, показанного на фигуре 1. Система привода 596 также включает датчик нагрузки 596с, который используется для определения величины или диапазона WOB, почти так же, как датчик нагрузки 140с, показанный на фигуре 1. Альтернативно или дополнительно, датчик нагрузки 596с может быть расположен отдельно от системы привода 596 или в другом компоненте, как показано на фигуре 5В, или в другом пространстве. Данные скручивания бурильной колонны, частоты вращения долота и нагрузки на долото, обнаруженные датчиками 596а, 596b и 596с соответственно, можно послать в виде электронного сигнала в контроллер 598 через проводную или беспроводную линию связи. Система привода 596 также включает цепь управления 596d и/или другие средства для управления координатами, скоростью и направлением вращения полого вала или другого компонента бурильной колонны, связанного с системой привода 596 (например, полого вала 145, показанного на фигуре 1). Цепь управления 596d и/или другой компонент системы привода 596 также может включать средства для управления скважинным гидравлическим забойным двигателем (двигателями). Таким образом, RPM в рамках настоящего изобретения может включать данные потока бурового насоса, преобразованные в RPM скважинного гидравлического забойного двигателя, который может быть добавлен к RPM бурильной колонны, чтобы определить общую величину RPM бурового долота.
Контроллер 598 служит для приема указанных параметров MSE от пользовательского интерфейса 592, лебедки 594 и системы привода 596 и использует параметры MSE непрерывно, периодически или иными образом для вычисления MSE. Далее контроллер 598 используется для подачи сигнала лебедкам 594 и/или системе привода 596 на основе расчетной MSE. Например, контроллер 598 может выполнить способ 200а, показанный на фигуре 2А, и/или способ 200b, показанный на фигуре 2В, и, таким образом, формирует один или несколько сигналов для лебедок 594 и/или системы привода 596, чтобы увеличить или уменьшить WOB и/или частоту вращения долота для оптимизации эффективности бурения (на основе MSE).
На фигуре 5С представлена блок-схема способа 500b, используемая для оптимизации операции бурения на основе оперативного вычисления энергии MSE согласно одному или несколькими объектам настоящего изобретения. Способ 500b может быть выполнен с помощью устройства 100, показанного на фигуре 1, устройства 300, показанного на фигуре 3, устройства 400а, показанного на фигуре 4А, устройства 400b, показанного на фигуре 4В, и/или устройства 590, показанного на фигуре 5В. Способ 500b также может быть выполнен в сочетании с реализацией способа 200а, показанного на фигуре 2А, способа 200b, показанного на фигуре 2В, и/или способа 500а, показанного на фигуре 5А. Способ 500b, показанный на фигуре 5С, может включать или формировать, по меньшей мере, часть способа 500а, показанного на фигуре 5А.
На стадии 512 способа 500b базовая MSE определена для оптимизации бурения по производительности, на основе MSE, изменяя WOB. Поскольку базовая MSE, определенная на стадии 512, будет использоваться для оптимизации, изменяя WOB, здесь будет использовано условное обозначение MSEBLWOB.
На следующей стадии 514 изменяется параметр WOB. Такое изменение может включать либо увеличение, либо уменьшение WOB. Увеличение или уменьшение WOB на стадии 514 может быть выполнено в некоторых предопределенных пределах WOB. Например, изменение WOB не должно отклоняться на более чем примерно 10%. Однако объем настоящего изобретения может включать и другие процентные отношения, включая случай, где такие проценты могут быть в предопределенных пределах WOB или вне таких пределов.
Параметр WOB может быть вручную изменен оператором или WOB может быть автоматически изменена сигналами, передаваемыми контроллером, системой управления, и/или другим компонентом буровой установки и соответствующего устройства. Как описано выше, такие сигналы могут быть переданы через систему дистанционного управления от другого терминала.
Затем, на стадии 516, бурение продолжается с измененной WOB в течение предопределенного временного интервала бурения ΔWOB. Интервал бурения ΔWOB может быть предопределенным промежутком времени, таким как пять минут, десять минут, тридцать минут или некоторой другой продолжительностью. Альтернативно временной интервал ΔWOB может быть предопределенной глубиной проходки. Например, стадия 516 может включать продолжение операции бурения с измененной WOB до тех пор, пока существующий ствол скважины не будет удлинен на пять футов, десять футов, пятьдесят футов или на некоторую другую глубину. Временной интервал ΔWOB также может включать составляющую времени и составляющую глубины. Например, временной интервал ΔWOB может включать бурение в течение, по меньшей мере, тридцати минут или до тех пор, пока ствол скважины не будет удлинен на десять футов. В другом примере временной интервал ΔWOB может включать бурение до тех пор, пока ствол скважины не будет удлинен на двадцать футов, но в промежутке времени более чем девяносто минут. Конечно, вышеупомянутые значения времени и глубины в интервале ΔWOB являются просто примерами, и в объем настоящего изобретения также могут входить много других значений.
После продолжения операции бурения в интервале ΔWOB с измененным параметром WOB выполняется стадия 518, чтобы определить MSEΔWOB, полученную в результате работы с измененным параметром WOB в интервале ΔWOB. На последующей стадии принятия решения 520 измененная MSEΔWOB сравнивается с базовой MSEBLWOB. Если измененная MSEΔWOB более желательна относительно MSEBLWOB, способ 500b переходит на стадию 522. Однако, если измененная MSEΔWOB не желательна относительно MSEBLWOB, способ 500b переходит на стадию 524, на которой WOB будет восстановлена до ее прежнего значения, прежде чем будет выполнена стадия 514, и способ переходит на стадию 522.
Определение на стадии принятия решения 520 может быть выполнено вручную оператором или автоматически контроллером, системой управления и/или другим компонентом буровой установки и соответствующего устройства. Определение может содержать обнаружение того, что значение MSEΔWOB желательно, если оно, в основном, равно и/или меньше MSEBLWOB. Однако дополнительные или альтернативные факторы также могут играть свою роль в определении, сделанном на стадии 520.
На стадии 522 способа 500b базовая MSE определяется для оптимизации эффективности бурения на основе MSE, изменяя частоту вращения долота и RPM. Поскольку базовая MSE, определенная на стадии 522, будет использоваться для оптимизации, изменяя частоту вращения (RPM), здесь будет использоваться условное обозначение MSEBLRPM.
На следующей стадии 526 изменяется RPM. Такое изменение может включать увеличение или уменьшение RPM. Увеличение или уменьшение RPM на стадии 526 может быть выполнено в некоторых предопределенных пределах RPM. Например, изменение RPM может быть не более чем примерно на 10%. Однако объем настоящего изобретения может включать и другие процентные отношения, включая случай, где такие проценты могут быть в предопределенных пределах или вне таких пределов.
Параметр RPM может быть изменен вручную оператором, или RPM может быть изменено автоматически сигналами, передаваемыми контроллером, системой управления и/или другим компонентом буровой установки и соответствующего устройства.
Затем, на стадии 528, бурение продолжается с измененной частотой вращения RPM в течение предопределенного временного интервала бурения ΔRPM. Интервал ΔRPM может быть предопределенным промежутком времени, таким как пять минут, десять минут, тридцать минут или некоторым другим промежутком времени. Альтернативно интервал ΔRPM может быть предопределенной глубиной проходки. Например, стадия 528 может содержать операцию продолжения бурения с измененным параметром RPM до тех пор, пока существующий ствол скважины не будет удлинен на пять футов, десять футов, пятьдесят футов или на некоторую другую глубину. Интервал ΔRPM также может включать составляющие времени и глубины. Например, интервал ΔRPM может включать бурение в течение, по меньшей мере, тридцати минут или пока ствол скважины не будет удлинен на десять футов. В другом примере интервал ΔRPM может включать бурение до тех пор, пока ствол скважины не будет удлинен на двадцать футов, но в течение промежутка времени не более чем девяносто минут. Конечно, вышеуказанные значения времени и глубины для интервала ΔRPM - просто примеры, и объем настоящего изобретения включает и много других значений.
После продолжения операции бурения в течение определенного времени ΔRPM с измененным параметром RPM 530 выполняется стадия определения MSEΔRPM, полученной в результате работы с измененным параметром RPM в течение интервала ΔRPM. На последующей стадии принятия решения 532 измененное значение MSEΔRPM сравнивается с базовой MSEBLRPM. Если измененное значение MSEΔRPM более желательно, чем MSEBLRPM, способ 500b возвращается на стадию 512. Однако если измененное значение MSEΔRPM менее желательно, чем MSEBLRPM, способ 500b переходит на стадию 534, где RPM восстанавливается до ее прежнего значения прежде, чем будет выполнена стадия 526, и способ переходит на стадию 512.
Определение на стадии принятия решения 532 может быть выполнено вручную оператором или автоматически контроллером, системой управления и/или другим компонентом буровой установки и соответствующего устройства. Определение может содержать обнаружение желательности использования MSEΔRPM, если оно, в основном, равно и/или меньше MSEBLRPM. Однако дополнительные или альтернативные факторы также могут играть важную роль в определении, сделанном на стадии 532.
Кроме того, после выполнения стадии 532 и/или 534, способ 500b, возможно, немедленно возвратится на стадию 512 для последующего повторения. Например, последующее повторение способа 500b может быть задержано на предопределенное время или глубину проходки. Альтернативно способ 500b может закончиться после выполнения стадий 532 и/или 534.
На фигуре 5D представлена блок-схема способа 500с для оптимизации операции бурения на основе вычисления MSE в реальном времени согласно одной или нескольким целям настоящего изобретения. Способ 500с может быть выполнен с помощью устройства 100, показанного на фигуре 1, устройства 300, показанного на фигуре 3, устройства 400а, показанного на фигуре 4А, устройства 400b, показанного на фигуре 4В, и/или устройства 590, показанного на фигуре 5В. Способ 500с также может быть выполнен совместно с выполнением способа 200а, показанного на фигуре 2А, способа 200b, показанного на фигуре 2В, способа 500а, показанного на фигуре 5А, и/или способа 500b, показанного на фигуре 5С. Способ 500с, показанный на фигуре 5D, может включать или формировать, по меньшей мере, часть способа 500а, показанного на фигуре 5А, и/или способа 500b, показанного на фигуре 5С.
На стадии 540 способа 500с базовая MSE определяется для оптимизации эффективности бурения на основе MSE путем снижения WOB. Поскольку базовая MSE,
определенная на стадии 540, будет использоваться для оптимизации путем снижения WOB, здесь будет использоваться условное обозначение MSEBL-WOB.
На следующей стадии 542 уменьшается параметр WOB. Уменьшение WOB на стадии 542 может быть в некоторых предопределенных пределах WOB. Например, уменьшение WOB может быть в пределах не более чем примерно 10%. Однако объем настоящего изобретения может включать и другие процентные отношения, включая случай, где такие проценты могут быть в предопределенных пределах WOB или вне таких пределов. Параметр WOB может быть снижен вручную оператором, или параметр WOB может быть автоматически снижен сигналами, передаваемыми контроллером, системой управления и/или другим компонентом буровой установки и соответствующего устройства.
Затем, на стадии 544, бурение продолжается со сниженной нагрузкой WOB в течение предопределенного временного интервала ΔWOB. Временной интервал ΔWOB
может быть предопределенным промежутком времени, например, пять минут, десять минут, тридцать минут или некоторой другой продолжительностью. Альтернативно временной интервал ΔWOB может быть предопределенной глубиной проходки. Например, стадия 544 может включать бурение, продолженное со сниженной нагрузкой WOB до тех пор, пока существующий ствол скважины не будет удлинен на пять футов, десять футов, пятьдесят футов или на некоторую другую глубину. Временной интервал ΔWOB также может включать составляющие времени и глубины. Например, временной интервал ΔWOB может включать бурение в течение, по меньшей мере, тридцати минут или до тех пор, пока ствол скважины не будет удлинен на десять футов. В другом примере, временной интервал ΔWOB может включать бурение до тех пор, пока ствол скважины не будет удлинен на двадцать футов, но в течение промежутка времени не более чем девяносто минут. Конечно, вышеуказанные значения времени и глубины для временного интервала ΔWOB являются просто примерами, и в объем настоящего изобретения также входят многие другие значения.
После продолжения операции бурения в интервале ΔWOB со сниженной нагрузкой WOB выполняется стадия 546, чтобы определить MSE-ΔWOB, полученную в результате работы со сниженной нагрузкой WOB в интервале ΔWOB. На последующей стадии принятия решения 548 сниженная MSE-ΔWOB сравнивается с базовой MSEBL-WOB. Если сниженная MSE-ΔWOB более желательна, чем MSEBL-WOB, способ 500с переходит на стадию 552. Однако если сниженная MSE-ΔWOB не является более желательной, чем MSEBL-WOB, способ 500с переходит на стадию 550, где WOB восстанавливается до ее прежнего значения, прежде чем будет выполнена стадия 542, и способ переходит на стадию 552.
Определение на стадии принятия решения 548 может быть выполнено вручную оператором или автоматически контроллером, системой управления и/или другим компонентом буровой установки и соответствующего устройства. Определение может содержать обнаружение желательного значения MSE-ΔWOB, если оно, в основном, равно и/или меньше MSEBL-WOB. Однако дополнительные или альтернативные факторы также могут играть свою роль в определении, выполняемом на стадии 548.
На стадии 552 способа 500с базовая MSE определяется для оптимизации эффективности бурения на основе MSE, увеличивая WOB. Поскольку базовая MSE, определенная на стадии 552, будет использоваться для оптимизации с увеличением нагрузки WOB, здесь будет использоваться обозначение MSEBL+WOB.
На следующей стадии 554 увеличивается параметр WOB. Увеличение WOB на стадии 554 может быть выполнено в некоторых предопределенных пределах WOB. Например, увеличение WOB может быть в пределах не более чем примерно 10%. Однако объем настоящего изобретения может включать и другие процентные отношения, включая случай, где такие проценты могут быть в предопределенных пределах WOB или вне таких пределов. Параметр WOB может быть увеличена вручную оператором, или WOB может быть автоматически увеличена сигналами, передаваемыми контроллером, системой управления и/или другим компонентом буровой установки и соответствующего устройства.
Затем, на стадии 556, бурение продолжается с увеличенным значением WOB в течение предопределенного интервала бурения +ΔWOB. Временной интервал +ΔWOB может быть предопределенным промежутком времени, например, пять минут, десять минут, тридцать минут или некоторой другой продолжительностью. Альтернативно временной интервал +ΔWOB может быть предопределенной глубиной проходки. Например, стадия 556 может включать бурение, продолженное с увеличенным значением WOB до тех пор, пока существующий ствол скважины не будет удлинен на пять футов, десять футов, пятьдесят футов или на некоторую другую глубину. Временной интервал +ΔWOB также может включать составляющие времени и глубины. Например, временной интервал +ΔWOB может включать бурение в течение, по меньшей мере, тридцати минут или до тех пор, пока ствол скважины не будет удлинен на десять футов. В другом примере, временной интервал +ΔWOB может включать бурение до тех пор, пока ствол скважины не будет удлинен на двадцать футов, но в течение промежутка времени не более чем девяносто минут.
После продолжения операции бурения в течение интервала бурения +ΔWOB с увеличенным значением WOB выполняется стадия 558, чтобы определить MSE+ΔWOB, полученную в результате работы с увеличенным значением WOB в течение интервала бурения +ΔWOB. На последующей стадии принятия решения 560 измененная
MSE+ΔWOB сравнивается с базовой MSEBL+WOB. Если измененная MSE+ΔWOB более желательна, чем MSEBL+WOB, способ 500с переходит на стадию 564. Однако если измененная MSE+ΔWOB не является более желательной, чем MSEBL+WOB, способ 500с переходит на стадию 562, где WOB восстанавливается до ее прежнего значения, прежде чем будет выполнена стадия 554, и способ переходит на стадию 564.
Определение на стадии принятия решения 560 может быть выполнено вручную оператором или автоматически контроллером, системой управления и/или другим компонентом буровой установки и соответствующего устройства. Определение может содержать обнаружение MSE+ΔWOB, как желательной величины, если она, в основном, равна и/или меньше MSEBL+WOB. Однако дополнительные или альтернативные факторы также могут играть свою роль в определении, выполняемом на стадии 560.
На стадии 564 способа 500с базовая MSE определяется для оптимизации эффективности бурения на основе MSE, снижая частоту вращения долота RPM. Поскольку базовая MSE, определенная на стадии 564, будет использоваться для оптимизации путем снижения RPM, здесь будет использоваться обозначение MSEBL-RPM.
На следующей стадии 566 снижается RPM. Снижение RPM на стадии 566 может быть выполнено в некоторых предопределенных пределах RPM. Например, снижение RPM может быть в пределах не более чем примерно 10%. Однако объем настоящего изобретения может включать и другие процентные отношения, включая случай, где такие проценты могут быть в предопределенных пределах или вне таких пределов RPM. RPM может быть вручную снижена оператором, или RPM может быть автоматически уменьшена сигналами, передаваемыми контроллером, системой управления и/или другим компонентом буровой установки и соответствующего устройства.
Затем, на стадии 568, бурение продолжается со сниженной частотой RPM в течение предопределенного интервала бурения ΔRPM. Интервал ΔRPM может быть предопределенным промежутком времени, например, пять минут, десять минут, тридцать минут или некоторой другой продолжительностью. Альтернативно интервал ΔRPM может быть предопределенной глубиной проходки. Например, стадия 568 может включать бурение, продолженное со сниженной RPM до тех пор, пока существующий ствол скважины не будет удлинен на пять футов, десять футов, пятьдесят футов или на некоторую другую глубину. Интервал ΔRPM также может включать составляющие времени и глубины. Например, интервал ΔRPM может включать бурение в течение, по меньшей мере, тридцати минут или до тех пор, пока ствол скважины не будет удлинен на десять футов. В другом примере, интервал ΔRPM может включать бурение до тех пор, пока ствол скважины не будет удлинен на двадцать футов, но в течение промежутка времени не более чем девяносто минут.
После продолжения операции бурения в течение интервала ΔRPM со сниженной RPM выполняется стадия 570, чтобы определить MSE-ΔRPM, полученную в результате работы со сниженной частотой RPM в течение интервала ΔRPM. На последующей стадии принятия решения 572 сниженная MSE-ΔRPM сравнивается с базовой MSEBL-RPM. Если измененная MSE-ΔRPM более желательна, чем MSEBL-RPM, способ 500с переходит на стадию 576. Однако если измененная MSE-ΔRPM не является более желательной, чем MSEBL-RPM, способ 500с переходит на стадию 574, где RPM восстанавливается до ее прежнего значения прежде, чем будет выполнена стадия 566, и способ переходит на стадию 576.
Определение на стадии принятия решения 572 может быть выполнено вручную оператором или автоматически контроллером, системой управления и/или другим компонентом буровой установки и соответствующего устройства. Определение может содержать обнаружение MSE-ΔRPM, как желательной величины, если оно, в основном, равно и/или меньше MSEBL-RPM. Однако дополнительные или альтернативные факторы также могут играть свою роль в определении, выполняемом на стадии 572.
На стадии 576 способа 500с базовая MSE определяется для оптимизации эффективности бурения на основе MSE, увеличивая частоту вращения долота RPM. Поскольку базовая MSE, определенная на стадии 576, будет использоваться для оптимизации путем увеличения RPM, здесь будет использоваться обозначение
MSEBL+RPM.
На следующей стадии 578 увеличивается частота RPM. Увеличение RPM на стадии 578 может быть выполнено в некоторых предопределенных пределах RPM. Например, увеличение RPM может быть в пределах не более чем примерно 10%. Однако объем настоящего изобретения может включать и другие процентные отношения, включая случай, где такие проценты могут быть в предопределенных пределах или вне таких пределов RPM. Частота RPM может быть увеличена вручную оператором, или RPM может быть автоматически увеличена сигналами, передаваемыми контроллером, системой управления и/или другим компонентом буровой установки и соответствующего устройства.
Затем, на стадии 580, бурение продолжается с увеличенной частотой вращения RPM в течение предопределенного интервала бурения +ΔRPM. Интервал +ΔRPM может быть предопределенным промежутком времени, например, пять минут, десять минут, тридцать минут или некоторой другой продолжительностью. Альтернативно интервал ΔRPM может быть предопределенной глубиной проходки. Например, стадия 580 может включать бурение, продолженное с увеличенной частотой вращения RPM до тех пор, пока существующий ствол скважины не будет удлинен на пять футов, десять футов, пятьдесят футов или на некоторую другую глубину. Интервал ΔRPM также может включать составляющие времени и глубины. Например, интервал ΔRPM может включать бурение в течение, по меньшей мере, тридцати минут или до тех пор, пока ствол скважины не будет удлинен на десять футов. В другом примере, интервал ΔRPM может включать бурение до тех пор, пока ствол скважины не будет удлинен на двадцать футов, но в течение промежутка времени не более чем девяносто минут.
После продолжения операции бурения в течение интервала ΔRPM с увеличенной частотой вращения RPM выполняется стадия 582, чтобы определить MSE+ΔRPM, полученную в результате работы с увеличенной частотой вращения RPM в интервале ΔRPM. На последующей стадии принятия решения 584 увеличенная MSE+ΔRPM сравнивается с базовой MSEBL+RPM. Если измененная MSE+ΔRPM более желательна, чем MSEBL+RPM, способ 500с переходит на стадию 588. Однако если измененная
MSE+ΔRPM не является более желательной относительно MSEBL+RPM, способ 500с переходит на стадию 586, где RPM восстанавливается до ее прежнего значения, прежде чем будет выполнена стадия 578, и способ переходит на стадию 588.
Определение на стадии принятия решения 584 может быть выполнено вручную оператором или автоматически контроллером, системой управления и/или другим компонентом буровой установки и соответствующего устройства. Определение может содержать обнаружение MSE+ΔRPM, как желательной величины, если она, в основном, равна и/или меньше MSEBL+RPM. Однако дополнительные или альтернативные факторы также могут играть свою роль в определении, выполняемом на стадии 584.
Стадия 588 содержит ожидание в течение предопределенного промежутка времени или интервала глубины бурения прежде, чем повторить способ 500с, путем возврата на стадию 540. Однако в одном примере осуществления изобретения этот интервал может быть настолько мал, что составляет 0 секунд или 0 футов, и способ возвращается на стадию 540, в основном, немедленно после выполнения стадии 584 и/или 586. Альтернативно способ 500с, возможно, не потребует повторения, и способ 500с, в основном, может закончиться после выполнения стадии 584 и/или 586.
Кроме того, интервалы бурения -ΔWOB, +ΔWOB, -ΔRPM и +ΔRPM могут быть, в основном, идентичными в пределах одного повторения способа 500с. Альтернативно один или несколько интервалов могут измениться по продолжительности или глубине относительно других интервалов. Точно так же, величина, на которую WOB уменьшается и увеличивается на стадиях 542 и 554, в основном, может быть идентична или может изменяться относительно друг друга в пределах одного повторения способа 500с. Величины, на которые RPM уменьшается и увеличивается на стадиях 566 и 578, в основном, могут быть идентичными или могут изменяться относительно друг друга в пределах одного повторения способа 500с. WOB и RPM также могут изменяться или оставаться теми же самыми при последующих повторениях способа 500с.
Как описано выше, один или несколько целей настоящего изобретения могут быть достигнуты при операции бурения или управления на основе MSE. Однако одна или несколько целей настоящего изобретения могут дополнительно или альтернативно быть достигнуты при операции бурения или управления на основе ΔТ. Таким образом, как описано выше, во время операции бурения крутящий момент передается от верхнего привода или другого вращательного привода к бурильной колонне. Крутящий момент, требуемый для привода бурового долота, может называться как крутящий момент на долоте (ТОВ), и может быть проверен, используя датчик, например датчик крутящего момента 140а, показанный на фигуре 1, датчик крутящего момента 355, показанный на фигуре 3, один или несколько датчиков 430, показанных на фигурах 4А и 4В, датчик крутящего момента 596а, показанный на фигуре 5В, и/или один или несколько устройств, реагирующих на крутящий момент оборудования ВНА.
Во время бурения бурильная колонна подвергается различным видам вибрации, включая осевые (продольные) колебания, изгиб (боковые колебания) и крутильные (вращательные) колебания. Крутильные колебания вызваны нелинейным взаимодействием между буровым долотом, бурильной колонной и стволом скважины. Как описано выше, такое крутильное колебание может включать скачкообразную вибрацию (SSA), характеризующуюся чередованием остановок (во время которых оборудование ВНА "прилипает" к стволу скважины) и работой оборудования ВНА с большой угловой скоростью (во время которой оборудование ВНА "скользит" относительно ствола скважины).
Скачкообразное движение оборудование ВНА вызывает изменения ТОВ или ΔТ в реальном времени. Этот интервал ΔТ может быть использован для формирования аварийного сигнала о возникновении скачкообразного движения согласно одному или нескольким целям настоящего изобретения. Например, ΔТ или параметр аварийного сигнала может быть показан визуально индикатором "сигнала останова", где зеленый свет может указывать на приемлемый рабочий режим (например, параметр аварийного сигнала 0-15), янтарный свет может указывать на возможность скачкообразного движения (например, параметр аварийного сигнала 16-25), и красный свет может указывать на наличие скачкообразного движения (например, параметр аварийного сигнала выше 25). Однако эти примерные пороги могут регулироваться во время работы, поскольку они могут изменяться в зависимости от условий бурения. ΔТ или параметр аварийного сигнала могут альтернативно или дополнительно быть показаны графически (например, отображая текущие и исторические данные), в виде звукового сообщения (например, через громкоговоритель) и/или через дисплей измерительного прибора или измерителя. Комбинации этих вариантов отображения также входят в объем настоящего изобретения. Например, вышеописанный индикатор "сигнала останова" может непрерывно указать параметр аварийного сигнала независимо от его значения, и звуковой аварийный сигнал может быть включен, если параметр аварийного сигнала превысит предопределенное значение (например, 25).
Контроллер операции бурения или другое устройство по настоящему изобретению может выполнять одну или несколько функций управления бурением на основе ΔТ или параметров аварийного сигнала, как описано выше. Например, контроллер 190, показанный на фигуре 1, контроллер 325, показанный на фигуре 3, контроллер 420, показанный на фигурах 4А или 4В, и/или контроллер 598, показанный на фигуре 5В, может быть использован для автоматического регулирования числа оборотов (RPM) бурильной колонны с импульсным увеличенного или уменьшением RPM (например, +/-5 RPM), чтобы разорвать гармонику скачкообразной вибрации до или после обнаружения скачкообразного движения, и затем вернуться к нормальному RPM. Контроллер может быть использован для автоматически увеличения или уменьшения RPM на предопределенную или устанавливаемую пользователем величину или процент предопределенной или устанавливаемой пользователем продолжительности, в попытке вывести операцию бурения из волнового состояния. Альтернативно контроллер может быть использован для автоматического продолжения изменения RPM вверх или вниз с приращением до ΔТ или до параметра аварийного сигнала, указывающего, что скачкообразное движение было остановлено.
В примере осуществления изобретения ΔТ или контроллер, реагирующий на SSA, также могут использоваться для автоматического восстановления WOB, если скачкообразное движение достигло серьезного уровня, что может произойти из-за чрезмерно высокой целевой частоты WOB. Такое автоматическое снижение WOB может содержать одну единственную корректировку или непрерывное регулирование до достижения ΔT или до параметра аварийного сигнала, указывающего, что скачкообразное движение было остановлено.
ΔT или контроллер, реагирующий на SSA, также могут использоваться для автоматического увеличения WOB, например, чтобы найти верхний предел скачкообразного движения WOB. Например, если все другие возможные параметры бурения оптимизированы или находятся в соответствующих пределах, контроллер может автоматически увеличить WOB шагами до ΔТ, или до параметра SSA, равного своему верхнему пределу (например, 25).
В примере осуществления изобретения операция бурения или контроля, основанная на параметре ΔТ согласно одному или несколькими целям настоящего изобретения, может функционировать согласно одному или несколькими аспектам следующего псевдокода:
где «момент» = крутящий момент; Процесс_Время - время, начиная с контроля параметра ΔT или SSA; Минимум_Момент - минимальный крутящий момент на долоте (ТОВ), который имел место в промежутке Процесс_Время; Максимум_Момент - максимальный ТОВ, который имел место в промежутке Процесс_Время; Момент в реальном времени - текущий ТОВ, Средний_Момент - средний ТОВ в промежутке Процесс_Время, и SSA - параметр аварийного сигнала при скачкообразном движении.
Как описано выше, ΔT или параметр SSA могут быть использованы в способе 200а, показанном на фигуре 2А, способе 200b, показанном на фигуре 2В, способе 500а, показанном на фигуре 5А, способе 500b, показанном на фигуре 5С, и/или способе 500с, показанном на фигуре 5D. Например, как показано на фигуре 6А, параметр ΔТ или SSA можно заменить параметром MSE, описанным выше со ссылкой на фигуру 5А. Альтернативно параметр ΔТ или SSA может быть проверен в дополнение к параметру MSE, описанному выше со ссылкой на фигуру 5А, чтобы убедиться, что операция бурения или управление основано как на параметре MSE, так и на параметре ΔТ или SSA.
На фигуре 6А представлена блок-схема способа 600а согласно одному или несколькими целям настоящего изобретения. Способ 600а может быть выполнен во взаимодействии с одним или несколькими компонентами устройства 100, показанного на фигуре 1, устройства 300, показанного на фигуре 3, устройства 400а, показанного на фигуре 4А, устройства 400b, показанного на фигуре 4В, и/или устройства 590, показанного на фигуре 5В, во время их работы.
Способ 600а включает стадию 602, во время которой измеряются текущие параметры ΔT. На следующей стадии 604 вычисляется ΔТ. Если ΔТ равен желательному ΔТ или иными образом приближается к идеальному, как определено на стадии принятия решения 606, способ 600а возобновляется, и стадия 602 будет повторена. Как описано выше, может иметь место "идеальное" состояние. Повторение способа 600а в основном может быть немедленным, или может быть задержано, чем способ 600а будет возобновлен, и стадия 602 будет повторена. Если параметр ΔТ не идеален, как определено на стадии принятия решения 606, способ 600а переходит на стадию 608, во время которой один или несколько параметров бурения (например, WOB, RPM, и т.д.) перестраиваются в попытке улучшить ΔТ. После выполнения стадии 608 способ 600а возобновляется, и стадия 602 повторяется. Такое повторение, в основном, может быть немедленным, или может иметь место период задержки прежде, чем способ 600а будет возобновлен, и стадия 602 будет повторена.
На фигуре 6В представлена блок-схема способа 600b для контроля ΔТ и/или SSA согласно одной или несколькими целям настоящего изобретения. Способ 600b может быть выполнен с помощью устройства 100, показанного на фигуре 1, устройства 300, показанного на фигуре 3, устройства 400а, показанного на фигуре 4А, устройства 400b, показанного на фигуре 4В, и/или устройства 590, показанного на фигуре 5В. Способ 600b также может быть выполнен совместно с выполнением способа 200а, показанного на фигуре 2А, способа 200b, показанного на фигуре 2В, способа 500а, показанного на фигуре 5А, способа 500b, показанного на фигуре 5С, способа 500с, показанного на фигуре 5D, и/или способа 600а, показанного на фигуре 6А. Способ 600b, показанный на фигуре 6В, может включать или формировать, по меньшей мере, часть способа 600а, показанного на фигуре 6А.
На стадии 612 способа 600b определяется базовый параметр ΔТ для оптимизации на основе ΔТ, изменяя WOB. Поскольку базовый параметр ΔТ, определенный на стадии 612, будет использоваться для оптимизации, изменяя WOB, здесь будет использоваться обозначение ΔTBLWOB.
На следующей стадии 614 изменяется WOB. Такое изменение может включать увеличение или уменьшение WOB. Увеличение или уменьшение WOB на стадии 614 может быть выполнено в некоторых предопределенных пределах WOB. Например, изменение WOB может быть в пределах не более чем примерно 10%. Однако объем настоящего изобретения может включать и другие процентные отношения, включая случай, где такие проценты могут быть в предопределенных пределах WOB или вне таких пределов. Параметр WOB может быть вручную изменен оператором или параметр WOB может быть автоматически изменен сигналами, передаваемыми контроллером, системой управления и/или другим компонентом буровой установки и соответствующего устройства. Как описано выше, такие сигналы могут быть переданы через систему дистанционного управления от другого терминала.
Затем, на стадии 616, бурение продолжается с измененным параметром WOB в течение предопределенного временного интервала ΔWOB. Временной интервал ΔWOB может быть предопределенным промежутком времени, таким как пять минут, десять минут, тридцать минут или некоторой другой продолжительностью. Альтернативно временной интервал ΔWOB может быть предопределенной глубиной проходки. Например, стадия 616 может включать бурение, продолженное с измененным параметром WOB до тех пор, пока существующий ствол скважины не будет удлинен на пять футов, десять футов, пятьдесят футов или на некоторую другую глубину. Временной интервал ΔWOB также может включать составляющие времени и глубины. Например, временной интервал ΔWOB может включать бурение в течение, по меньшей мере, тридцати минут или до тех пор, пока ствол скважины не будет удлинен на десять футов. В другом примере временной интервал ΔWOB может включать бурение до тех пор, пока ствол скважины не будет удлинен на двадцать футов, но в течение промежутка времени не более чем девяносто минут. Конечно, вышеуказанные значения времени и глубины для временного интервала ΔWOB - просто примеры, и в объем настоящего изобретения также входят многие другие значения.
После продолжения операции бурения в интервале ΔWOB с измененным параметром WOB выполняется стадия 618, чтобы определить величину ΔТΔWOB, полученную в результате работы с измененным параметром WOB в интервале ΔWOB. На последующей стадии принятия решения 620 измененный параметр ΔТΔWOB сравнивается с базовым ΔTBLWOB. Если измененный параметр ΔТΔWOB более желателен, чем ΔTBLWOB, способ 600b переходит на стадию 622. Однако если измененный параметр ΔТΔWOB менее желателен, чем ΔTBLWOB, способ 600b переходит на стадию 624, где WOB восстанавливается до его прежнего значения прежде, чем стадия 614 будет выполнена, и способ переходит на стадию 622.
Определение на стадии принятия решения 620 может быть выполнено вручную оператором или автоматически контроллером, системой управления и/или другим компонентом буровой установки и соответствующего устройства. Определение может включать поиск желательного значения ΔТΔWOB, если оно, в основном, равно и/или меньше ΔTBLWOB. Однако дополнительные или альтернативные факторы также могут играть свою роль в определении, выполняемом на стадии 620.
На стадии 622 способа 600b определяется базовый параметр ΔТ для оптимизации на основе ΔТ, изменяя частоту вращения долота (параметр RPM). Поскольку базовый параметр ΔT, определенный на стадии 622, будет использоваться для оптимизации, изменяя RPM, здесь будет использоваться обозначение ΔTBLRPM.
На следующей стадии 626 изменяется параметр RPM. Такое изменение может включать либо увеличение, либо уменьшение RPM. Увеличение или уменьшение RPM на стадии 626 может быть осуществлено в некоторых предопределенных пределах RPM. Например, изменение RPM может быть в пределах не более чем примерно 10%. Однако объем настоящего изобретения может включать и другие процентные отношения, включая случай, где такие проценты могут быть в предопределенных пределах или вне таких пределов RPM. Параметр RPM может быть изменен вручную оператором, или RPM может быть автоматически изменен сигналами, передаваемыми контроллером, системой управления и/или другим компонентом буровой установки и соответствующего устройства.
Затем, на стадии 628, бурение продолжается с измененным параметра RPM в течение предопределенного интервала бурения ΔRPM, Интервал ΔRPM может быть предопределенным промежутком времени, таким как пять минут, десять минут, тридцать минут или некоторой другой продолжительностью. Альтернативно интервал ΔRPM может быть предопределенной глубиной проходки. Например, стадия 628 может включать бурение, продолженное с измененным параметром RPM до тех пор, пока существующий ствол скважины не будет удлинен на пять футов, десять футов, пятьдесят футов или на некоторую другую глубину. Интервал ΔRPM также может включать составляющие времени и глубины. Например, интервал ΔRPM может включать бурение в течение, по меньшей мере, тридцати минут или до тех пор, пока ствол скважины не будет удлинен на десять футов. В другом примере интервал ΔRPM может включать бурение до тех пор, пока ствол скважины не будет удлинен на двадцать футов, но в течение промежутка времени не более чем девяносто минут. Конечно, вышеуказанные значения времени и глубины для интервала ΔRPM - просто примеры, и в объем настоящего изобретения также входят многие другие значения.
После продолжения операции бурения в течение определенного времени ΔRPM с измененным параметром RPM выполняется стадия 630, чтобы определить величину ΔТΔRPM, полученную в результате работы с измененным параметром RPM в течение интервала ΔRPM. На последующей стадии принятия решения 632 измененный параметр ΔТΔRPM сравнивается с базовым ΔTBLRPM. Если измененный параметр ΔТΔRPM более желателен, чем ΔTBLRPM, способ 600b возвращается на стадию 612. Однако если измененный параметр ΔТΔRPM менее желателен, чем ΔTBLRPM, способ 600b переходит на стадию 634, где RPM восстанавливается до своего прежнего значения прежде, чем будет выполнена стадия 626, и способ переходит на стадию 612.
Определение на стадии принятия решения 632 может быть выполнено вручную оператором или автоматически контроллером, системой управления и/или другим компонентом буровой установки и соответствующего устройства. Определение может содержать обнаружение желательности ΔТΔRPM, если оно, в основном, равно и/или меньше ΔTBLRPM. Однако дополнительные или альтернативные факторы также могут играть свою роль в определении, выполняемом на стадии 632.
Кроме того, после выполнения стадии 632 и/или 634, способ 600b, возможно, немедленно возвращается на стадию 612 для последующего повторения, или последующее повторение способа 600b может быть отложено на предопределенный временной интервал или глубину проходки. Альтернативно способ 600b может закончиться после выполнения стадий 632 и/или 634.
На фигуре 6С представлена блок-схема способа 600с для оптимизации операции бурения на основе параметра ΔT, вычисленного в реальном времени согласно одному или несколькими целям настоящего изобретения. Способ 600с может быть выполнен с помощью устройства 100, показанного на фигуре 1, устройства 300, показанного на фигуре 3, устройства 400а, показанного на фигуре 4А, устройства 400b, показанного на фигуре 4В, и/или устройства 590, показанного на фигуре 5В. Способ 600с также может быть выполнен совместно с выполнением способа 200а, показанного на фигуре 2А, способа 200b, показанного на фигуре 2В, способа 500а, показанного на фигуре 5А, способа 500b, показанного на фигуре 5С, способа 500с, показанного на фигуре 5D, способа 600а, показанного на фигуре 6А, и/или способа 600b, показанного на фигуре 6В. Способ 600с, показанный на фигуре 6С, может содержать или формировать, по меньшей мере, часть способа 600а, показанного на фигуре 6А, и/или способа 600b, показанного на фигуре 6В.
На стадии 640 способа 600с определяется базовый параметр ΔТ для оптимизации на основе ΔT путем снижения WOB. Поскольку базовый параметр ΔT, определенный на стадии 640, будет использоваться для оптимизации путем снижения WOB, здесь будет использоваться обозначение ΔTBL-WOB.
На следующей стадии 642 снижается параметр WOB. Снижение WOB на стадии 642 может быть выполнено в некоторых предопределенных пределах WOB. Например, снижение WOB может быть в пределах не более чем примерно 10%. Однако объем настоящего изобретения может включать и другие процентные отношения, включая случай, где такие проценты могут быть в предопределенных пределах WOB или вне таких пределов. Параметр WOB может быть снижен вручную оператором или WOB может быть автоматически снижен сигналами, передаваемыми контроллером, системой управления и/или другим компонентом буровой установки и соответствующего устройства.
Затем, на стадии 644, бурение продолжается со сниженным параметром WOB в течение предопределенного временного интервала ΔWOB. Временной интервал ΔWOB
может быть предопределенным промежутком времени, например, пять минут, десять минут, тридцать минут или некоторой другой продолжительностью. Альтернативно временной интервал ΔWOB может быть предопределенной глубиной проходки. Например, стадия 644 может включать бурение, продолженное со сниженным параметром WOB до тех пор, пока существующий ствол скважины не будет удлинен на пять футов, десять футов, пятьдесят футов или на некоторую другую глубину. Временной интервал ΔWOB также может включать составляющие времени и глубины. Например, временной интервал ΔWOB может включать бурение в течение, по меньшей мере, тридцати минут или до тех пор, пока ствол скважины не будет удлинен на десять футов. В другом примере, временной интервал ΔWOB может включать бурение до тех пор, пока ствол скважины не будет удлинен на двадцать футов, но в течение промежутка времени не более чем девяносто минут. Конечно, вышеуказанные значения времени и глубины для интервала ΔWOB являются просто примерами, и в объем настоящего изобретения также входят многие другие значения.
После продолжения операции бурения в интервале ΔWOB со сниженным параметром WOB выполняется стадия 646, чтобы определить величину ΔТ-ΔWOB. полученную в результате работы со сниженным параметром WOB в интервале ΔWOB. На последующей стадии принятия решения 648 сниженный интервал ΔТ-ΔWOB сравнивается с базовым ΔTBL-WOB. Если сниженный ΔТ-ΔWOB более желателен, чем ΔTBL-WOB, способ 600с переходит на стадию 652. Однако, если сниженный ΔТ-ΔWOB менее желателен, чем ΔTBL-WOB, способ 600с переходит на стадию 650, где WOB восстанавливается до своего прежнего значения прежде, чем будет выполнена стадия 642, и способ переходит на стадию 652.
Определение на стадии принятия решения 648 может быть выполнено вручную оператором или автоматически контроллером, системой управления и/или другим компонентом буровой установки и соответствующего устройства. Определение может содержать обнаружение ΔT-ΔWOB, как желательной величины, если она, в основном, равна и/или меньше ΔTBL-WOB. Однако дополнительные или альтернативные факторы также могут играть свою роль в определении, выполняемом на стадии 648.
На стадии 652 способа 600с определяется базовый параметр ΔТ для оптимизации на основе ΔТ, увеличивая WOB. Поскольку базовый параметр ΔТ, определенный на стадии 652, будет использоваться для оптимизации путем увеличения WOB, здесь будет использоваться обозначение ΔTBL+WOB.
На следующей стадии 654 увеличивается параметр WOB. Увеличение WOB на стадии 654 может быть выполнено в некоторых предопределенных пределах WOB. Например, увеличение WOB может быть в пределах не более чем примерно 10%. Однако объем настоящего изобретения может включать и другие процентные отношения, включая случай, где такие проценты могут быть в предопределенных пределах WOB или вне таких пределов. Параметр WOB может быть увеличен вручную оператором, или WOB может быть автоматически увеличен сигналами, передаваемыми контроллером, системой управления и/или другим компонентом буровой установки и соответствующего устройства.
Затем, на стадии 656, бурение продолжается с увеличенным значением WOB в течение предопределенного интервала бурения +ΔWOB. Интервал +ΔWOB может быть предопределенным промежутком времени, например, пять минут, десять минут, тридцать минут или некоторой другой продолжительностью. Альтернативно временной интервал +ΔWOB может быть предопределенной глубиной проходки. Например, стадия 656 может включать бурение, продолженное с увеличенным значением WOB до тех пор, пока существующий ствол скважины не будет удлинен на пять футов, десять футов, пятьдесят футов или на некоторую другую глубину. Интервал +ΔWOB также может включать составляющие времени и глубины. Например, интервал +ΔWOB может включать бурение в течение, по меньшей мере, тридцати минут или до тех пор, пока ствол скважины не будет удлинен на десять футов. В другом примере, интервал +ΔWOB может включать бурение до тех пор, пока ствол скважины не будет удлинен на двадцать футов, но в течение промежутка времени не более чем девяносто минут.
После продолжения операции бурения в течение интервала бурения +ΔWOB с увеличенным значением WOB выполняется стадия 658, чтобы определить величину ΔT+ΔWOB, полученную в результате работы с увеличенным значением WOB в течение интервала бурения +ΔWOB. На последующей стадии принятия решения 660 измененный параметр ΔT+ΔWOB сравнивается с базовым ΔTBL+WOB. Если измененный параметр ΔТ+ΔWOB более желателен, чем ΔTBL+WOB, способ 600с переходит на стадию 664. Однако если измененный параметр ΔТ+ΔWOB менее желателен, чем
ΔTBL+WOB, способ 600с переходит на стадию 662, где WOB восстанавливается до своего прежнего значения прежде, чем будет выполнена стадия 654, и способ переходит на стадию 664.
Определение на стадии принятия решения 660 может быть выполнено вручную оператором или автоматически контроллером, системой управления и/или другим компонентом буровой установки и соответствующего устройства. Определение может содержать обнаружение ΔТ+ΔWOB, как желательной величины, если она, в основном, равна и/или меньше ΔTBL+WOB. Однако дополнительные или альтернативные факторы также могут играть свою роль в определении, выполняемом на стадии 660.
На стадии 664 способа 600с определяется базовый параметр ΔТ для оптимизации на основе ΔТ, снижая частоту вращения долота RPM. Поскольку базовый параметр ΔТ, определенный на стадии 664, будет использоваться для оптимизации путем снижения RPM, здесь будет использоваться обозначение ΔTBL-WOB.
На следующей стадии 666 снижается частота вращения долота RPM. Снижение RPM
на стадии 666 может быть выполнено в некоторых предопределенных пределах RPM. Например, снижение RPM может быть в пределах не более чем примерно 10%. Однако объем настоящего изобретения может включать и другие процентные отношения, включая случай, где такие проценты могут быть в предопределенных пределах или вне таких пределов RPM. RPM может быть вручную снижена оператором, или RPM может быть автоматически уменьшена сигналами, передаваемыми контроллером, системой управления и/или другим компонентом буровой установки и соответствующего устройства.
Затем, на стадии 668, бурение продолжается со сниженной частотой RPM в течение предопределенного интервала бурения ΔRPM. Интервал ΔRPM может быть предопределенным промежутком времени, например, пять минут, десять минут, тридцать минут или некоторой другой продолжительностью. Альтернативно интервал ΔRPM может быть предопределенной глубиной проходки. Например, стадия 668 может включать бурение, продолженное со сниженной частотой RPM до тех пор, пока существующий ствол скважины не будет удлинен на пять футов, десять футов, пятьдесят футов или на некоторую другую глубину. Интервал ΔRPM также может включать составляющие времени и глубины. Например, интервал ΔRPM может включать бурение в течение, по меньшей мере, тридцати минут или до тех пор, пока ствол скважины не будет удлинен на десять футов. В другом примере, интервал ΔRPM может включать бурение до тех пор, пока ствол скважины не будет удлинен на двадцать футов, но в течение промежутка времени не более чем девяносто минут.
После продолжения операции бурения в течение интервала ΔRPM со сниженной частотой RPM выполняется стадия 670, чтобы определить величину ΔТ-ΔRPM, полученную в результате работы со сниженной частотой RPM в течение интервала ΔRPM. На последующей стадии принятия решения 672 сниженный интервал ΔТ-ΔRPM сравнивается с базовым ΔTBL-RPM. Если измененный параметр ΔТ-ΔRPM более желателен, чем ΔTBL-RPM, способ 600с переходит на стадию 676. Однако, если измененный параметр ΔТ-ΔRPM менее желателен, чем ΔTBL-RPM, способ 600 с переходит на стадию 674, где RPM восстанавливается до своего прежнего значения прежде, чем будет выполнена стадия 666, и способ переходит на стадию 676.
Определение на стадии принятия решения 672 может быть выполнено вручную оператором или автоматически контроллером, системой управления и/или другим компонентом буровой установки и соответствующего устройства. Определение может содержать обнаружение ΔТ-ΔRPM, как желательной величины, если она, в основном, равна и/или меньше ΔTBL-RPM. Однако дополнительные или альтернативные факторы также могут играть свою роль в определении, выполняемом на стадии 672.
На стадии 676 способа 600с определяется базовый параметр ΔT для оптимизации на основе ΔТ частоты вращения долота RPM. Поскольку базовый параметр ΔT, определенный на стадии 676, будет использоваться для оптимизации путем увеличения RPM, здесь будет использоваться обозначение ΔTBL+RPM.
На следующей стадии 678 увеличивается RPM. Увеличение RPM на стадии 678 может быть выполнено в некоторых предопределенных пределах RPM. Например, увеличение RPM может быть в пределах не более чем примерно 10%. Однако объем настоящего изобретения может включать и другие процентные отношения, включая случай, где такие проценты могут быть в предопределенных пределах или вне таких пределов RPM. RPM может быть вручную увеличена оператором или RPM может быть автоматически увеличена сигналами, передаваемыми контроллером, системой управления и/или другим компонентом буровой установки и соответствующего устройства.
Затем, на стадии 680, бурение продолжается с увеличенной частотой вращения RPM в течение предопределенного интервала бурения +ΔRPM. Интервал ΔRPM может быть предопределенным промежутком времени, например, пять минут, десять минут, тридцать минут или некоторой другой продолжительностью. Альтернативно интервал ΔRPM может быть предопределенной глубиной проходки. Например, стадия 680 может включать бурение, продолженное с увеличенной частотой вращения RPM до тех пор, пока существующий ствол скважины не будет удлинен на пять футов, десять футов, пятьдесят футов или на некоторую другую глубину. Интервал ΔRPM также может включать составляющие времени и глубины. Например, интервал ΔRPM может включать бурение в течение, по меньшей мере, тридцати минут или до тех пор, пока ствол скважины не будет удлинен на десять футов. В другом примере, интервал ΔRPM может включать бурение до тех пор, пока ствол скважины не будет удлинен на двадцать футов, но в течение промежутка времени не более чем девяносто минут.
После продолжения операции бурения в течение интервала ΔRPM с увеличенной частотой вращения RPM выполняется стадия 682, чтобы определить величин
ΔТ+ΔRPM, полученную в результате работы с увеличенной частотой вращения RPM в интервале ΔRPM. На последующей стадии принятия решения 684 увеличенный параметр ΔТ+ΔRPM сравнивается с базовым ΔTBL+RPM Если измененный параметр
ΔТ+ΔRPM более желателен, чем ΔTBL+RPM, способ 600с переходит на стадию 688. Однако если измененный параметр ΔТ+ΔRPM менее желателен, чем ΔTBL+RPM, способ 600с переходит на стадию 686, где RPM восстанавливается до своего прежнего значения прежде, чем будет выполнена стадия 678, и способ переходит на стадию 688.
Определение на стадии принятия решения 684 может быть выполнено вручную оператором или автоматически контроллером, системой управления и/или другим компонентом буровой установки и соответствующего устройства. Определение может содержать обнаружение желательности величины ΔТ+ΔRPM, если она, в основном, равна и/или меньше ΔTBL+RPM. Однако дополнительные или альтернативные факторы также могут играть свою роль в определении, выполняемом на стадии 684.
Стадия 688 содержит ожидание в течение предопределенного промежутка времени или интервала глубины бурения прежде, чем повторить способ 600с, путем возврата на стадию 640. Однако в примере осуществления изобретения интервал может быть настолько мал, что составляет 0 секунд или 0 футов, и способ возвращается на стадию 640, в основном, немедленно после выполнения стадии 684 и/или 686. Альтернативно способ 600с, возможно, не потребует повторения, и способ 600с, в основном, может закончиться после выполнения стадии 684 и/или 686.
Кроме того, интервалы бурения: -ΔWOB, +ΔWOB, -ΔRPM и +ΔRPM каждый может быть, в основном, одним и тем же в пределах одного повторения способа 600с. Альтернативно один или несколько интервалов могут измениться по продолжительности или по глубине относительно других интервалов. Точно так же, величина, на которую WOB уменьшается и увеличивается на стадиях 642 и 654, в основном, может быть одной и той же или может изменяться относительно друг друга в пределах одного повторения способа 600с. Величина, на которую RPM уменьшается и увеличивается на стадиях 666 и 678, в основном, может быть одной и той же или может изменяться относительно друг друга в пределах одного повторения способа 600с. Отклонения WOB и RPM также могут изменяться или оставаться одними и теми же при последующих повторениях способа 600с.
На фигуре 7 представлена схема устройства 700 согласно одному или несколькими объектам настоящего изобретения. Устройство 700 может включить или составлять, по меньшей мере, часть устройства 100, показанного на фигуре 1, устройства 300, показанного на фигуре 3, устройства 400а, показанного на фигуре 4А, устройства 400b, показанного на фигуре 4В, и/или устройства 590, показанного на фигуре 5В. Устройство 700 представляет пример осуществления изобретения, в котором один или несколько способов объеме настоящего изобретения могут быть выполнены или иными образом осуществлены, включая способ 200а, показанный на фигуре 2А, способ 200b, показанный на фигуре 2В, способ 500а, показанный на фигуре 5А, способ 500b, показанный на фигуре 5С, способ 500с, показанный на фигуре 5D, способ 600а, показанный на фигуре 6А, способ 600b, показанный на фигуре 6В, и/или способ 600с, показанный на фигуре 6С.
Устройство 700 включает множество вводов данных, вводимых вручную или автоматически, при этом все они вместе взятые называются здесь входами 702. Устройство также включает множество автоматических регуляторов, вычислительных устройств, детекторов и других процессоров, все вместе взятые называются здесь процессорами 704. Данные от различных входов 702 передаются на различные процессоры 704, как показано на фигуре 7 стрелкой 703. Устройство 700 также включает множество датчиков, кодирующих устройств, приводов, двигателей, и других сенсорных и измерительных, и исполнительных механизмов, все вместе называемые здесь устройствами 708. Различные данные и сигналы, все вместе называемые здесь данными 706, передаются между различными процессорами 704 и различными устройствами 708, как показано на фигуре 7 стрелками 705.
Устройство 700 также может включать дисплей 710 или соединяется с таким дисплеем, с помощью которого можно вести диалог или иными образом получать данные от одного или нескольких процессоров 704, а также от других компонентов устройства 700. Дисплей 710 также может быть назван как интерфейс человек-машина (HMI), хотя такой HMI также может включать один или несколько входов 702 и/или процессоров 704.
В примере осуществления изобретения, показанном на фигуре 7, входы 702 включают средства, обеспечивающие следующие заданные значений, пределы, диапазоны и другие данные:
забойное давление 702а;
положение заслонки 702b;
предел ΔР 702с;
точка ΔР 702;
предельное значение тягового усилия лебедки 702е;
предельное значение MSE 702f;
целевая величина MSE 702g;
заданное значение бурового раствора 702h;
тарировка давления насоса 702i;
отрицательная амплитуда полого вала 702j;
положительная амплитуда полого вала 702k;
заданное значение скорости бурения (ROP) 702l;
положение скважинного инструмента 702n;
частота вращения верхнего привода (RPM) 702о;
предельное значение крутящего момента верхнего привода 702р;
значение WOB 702q; и
тарировка WOB 702r.
Однако входы 702 в объеме настоящего изобретения могут включать средства для обеспечения дополнительных или альтернативных заданных значений, пределов, диапазонов и других данных.
Забойное давление 702а может указывать на значение максимального желательного давления газообразной и/или другой окружающей среды в нижней части ствола скважины. Альтернативно забойное давление 702а может указывать на диапазон, в пределах которого желательно поддерживать давление у основания ствола скважины. Такое давление может быть выражено как абсолютное давление или манометрическое давление (например, относительно атмосферного давления или некоторого другого заданного давления).
Обозначение положения заслонки 702b может быть рабочей точкой или величиной, указывающей на желательное положение заслонки. Альтернативно обозначение положения заслонки 702b может указывать на диапазон, в пределах которого желательно поддерживать положение заслонки. Заслонка может быть устройством, имеющим отверстие или другое средство, используемое для управления расходом жидкости и/или давлением. Заслонка может быть установлена в конце устьевой обвязки, которая представляет собой трубу высокого давления, идущую от выхода блока противовыбросовых превенторов, благодаря чему жидкость под давлением в стволе скважины может вытекать из скважины через устьевую линию к заслонке, снижая, таким образом, давление жидкости (например, до атмосферного давления). Обозначение положения заслонки 702b может быть двойным индикатором, выражающим положение заслонки или как "открытое" или как "закрытое". Альтернативно обозначение положения заслонки 702b может быть выражено как процент, указывающий на степень частичного открытия или закрытия заслонки.
Предел ΔР 702с может быть величиной, указывающей на максимальный или минимальный перепад давления через гидравлический забойный двигатель. Альтернативно предел ΔР 702с может указывать на диапазон, в пределах которого желательно поддерживать перепад давления через гидравлический забойный двигатель. Обозначение ΔР 702d может быть рабочей точкой или величиной, указывающей на желательный перепад давления через гидравлический забойный двигатель. В примере осуществления изобретения предел ΔР 702с является величиной, указывающей на максимальный желательный перепад давления через гидравлический забойный двигатель, а обозначение ΔР 702d является величиной, указывающей на номинальный желательный перепад давления через гидравлический забойный двигатель.
Предельное значение тягового усилия лебедок 702е может быть величиной, указывающей на максимальную силу, которая будет приложена к лебедкам буровым канатом (например, при поддержании бурильной колонны выше забоя или при вытягивании оборудования из ствола скважины). Например, предельное значение тягового усилия лебедок 702 может указывать на максимальную нагрузку на крюке, которая должна быть обеспечена лебедками во время работы буровой установки. Предельное значение тягового усилия лебедок 702е может быть выражен как максимальный вес или натяг бурового каната, который может быть выдержан лебедками, не повреждая лебедки, буровой канат и/или другое оборудование.
Предельное значение MSE 702f может быть величиной, указывающей на максимальную или минимальную энергию MSE, желательную во время бурения. Альтернативно предельное значение MSE 702f может быть диапазоном, в пределах которого желательно поддерживать MSE во время бурения. Как обсуждено выше, фактическое значение MSE, по меньшей мере, частично зависит от WOB, диаметра бурового долота, частоты вращения долота, крутящего момента бурильной колонны, и механической скорости бурения (ROP), каждая из которых может регулироваться в соответствии с целями настоящего изобретения, чтобы обеспечить желательную MSE. Целевая MSE 702g может быть величиной, указывающей на желательную MSE или диапазон, в пределах которого желательно поддерживать MSE во время бурения. В примере осуществления изобретения предельное значение MSE 702f является величиной или диапазоном, указывающим на максимальную и/или минимальную MSE,
и целевая MSE 702g является величиной, указывающей на желательную номинальную MSE.
Заданная величина бурового раствора 702h может быть величиной, указывающей на максимальный, минимальный или номинальный желательный расход бурового раствора, обеспечиваемый буровым насосом. Альтернативно заданная величина бурового раствора 702h может быть диапазоном, в пределах которого желательно поддерживать расход бурового раствора. Тарировка давления нагнетания 702i может быть величиной, указывающей на текущее, желательное, начальное или другое давление бурового насоса. Тарировка давления бурового насоса, в основном, учитывает разницу между давлением бурового раствора и обсадной трубой или давлением ствола скважины, когда бурильная колонна отходит от дна скважины.
Отрицательная амплитуда полого вала 702j может быть величиной, указывающей на желательное максимальное вращение полого вала от нейтральной точки колебания полого вала в первом угловом направлении, тогда как положительная амплитуда полый вал 702k может быть величиной, указывающей на желательное максимальное вращение полого вала от нейтральной точки колебания полого вала в противоположном угловом направлении. Например, во время работы верхнего привода при колебании полого вала отрицательная амплитуда полого вала 702j может указывать на желательное максимальное вращение полого вала вправо от нейтральной точки колебания, и положительная амплитуда полого вала 702k может указывать на желательное максимальное вращение полого вала влево от нейтральной точки колебания.
Рабочая точка ROP 702l может быть величиной, указывающей на максимальную, минимальную или номинальную желательную скорость проходки ROP. Альтернативно ROP 702l может быть диапазоном, в пределах которого она желательно поддерживать эту скорость.
Положение скважинного инструмента 702n может быть величиной, указывающей на желательную ориентацию скважинного инструмента. Альтернативно положение скважинного инструмента 702n может быть диапазоном, в пределах которого желательно поддерживать положение скважинного инструмента 702n. Положение скважинного инструмента может быть выражено как один или несколько углов относительно фиксированной или предопределенной точки. Например, положение скважинного инструмента 702n может быть представлено желательной ориентацией скважинного инструмента виде азимута относительно истинного северного полюса и/или желательного наклона скважинного инструмента от вертикали.
RPM верхнего привода 702о может быть величиной, указывающей на максимальную, минимальную или номинальную желательную частоту вращения верхнего привода. Альтернативно RPM верхнего привода двигателя 702о может быть диапазоном, в пределах которого желательно поддерживать частоту вращения привода. Предел крутящего момента верхнего привода может быть величиной, указывающей на максимальный крутящий момент, который будет создан верхним приводом.
Обозначение WOB 702q может быть величиной, указывающей на максимальную, минимальную или номинальную желательную нагрузку WOB, вытекающую из веса бурильной колонны, действующего на буровое долото, хотя возможно также учитывать и другие силы, действующие на WOB, например, трение между бурильной колонной и стволом скважины. Альтернативно обозначение WOB 702q может быть диапазоном, в котором желательно поддерживать WOB. Тарировка WOB 702r может быть величиной, указывающей на текущую, желательную, начальную, обзорную или другую установку WOB, которая учитывает нагрузку на крюке и вес бурильной колонны, когда она поднята от дна скважины.
Один или несколько входов 702 могут включать клавиатуру, устройство голосовой идентификации, шкалу, джойстик, мышь, базу данных и/или другое обычное или разработанное в будущем устройство ввода данных. Один или несколько входов 702 могут поддерживать ввод данных от местных и/или удаленных терминалов. Один или несколько входов 702 могут включать средство для выбора пользователем предопределенных заданных точек, значений или диапазонов, например, через одно или несколько падающих меню. Один или несколько входов 702 также могут быть или альтернативно использоваться для автоматического запуска одного или нескольких процессоров 704, например, через выполнение одной или несколькими процедур поиска базы данных. Один или несколько входов 702, возможно в сочетании с другими компонентами устройства 700, используются для поддержки операции и/или контроля со станций на участке буровой установки, также как одного или нескольких удаленных терминалов. Каждый из входов 702 может иметь отдельные средства для ввода, хотя два или несколько входов 702 могут все вместе иметь только одно средство для ввода. Один или несколько входов 702 могут быть использованы для ввода данных оператором, хотя один или несколько входов 702 могут альтернативно использоваться для автоматического ввода данных компьютером, программой, модулем ввода, приложением, поиском базы данных, алгоритмом, вычислением и/или иными образом. Один или несколько входов 702 могут быть использованы для такого автоматического ввода данных, но с функцией отмены, которую может применить оператор или оператор может проверить автоматически введенные данные.
В примере осуществления изобретения, показанном на фигуре 7А, устройства 708 включают:
датчик положения блока 708а;
датчик давления 708b в обсадной колонне;
датчик положения заслонки 708с;
датчик крепления груза у неподвижного конца 708d;
кодирующее устройство лебедок 708е;
датчик давления бурового раствора 708f;
гравитационный датчик скважинного инструмента MWD 708g;
магнитный датчик скважинного инструмента MWD 708h;
датчик расхода на возвратной линии 708i;
датчик плотности бурового раствора возвратной линии 708j;
кодирующее устройство верхнего привода 708k;
датчик крутящего момента верхнего привода 708l;
привод заслонки 708m;
приводы лебедок 708n;
двигатель лебедок 708о;
двигатель бурового насоса 708р;
Двигатель верхнего привода 708q; и
двигатель верхнего привода 708r.
Однако устройства 708 могут включать дополнительные или альтернативные компоненты в объеме настоящего изобретения. Устройства 708 предназначены для работы с соответствующими механизмами лебедок, заслонки, бурового насоса, верхнего привода, блока, бурильной колонны и/или других компонентов буровой установки. Альтернативно устройства 708 также включают один или несколько других компонентов буровой установки.
Датчик положения блока 708а может включать оптический датчик, высокочастотный датчик, оптическое или другое кодирующее устройство или другой тип датчика, используемого для определения относительного или абсолютного вертикального положения блока. Датчик положения блока 708а может быть соединен с указанным блоком, буровым долотом, лебедками и/или другим компонентом устройства 700 или буровой установки.
Датчик давления 708b в обсадной колонне используется для обнаружения давления в кольцевом пространстве между бурильной колонной и обсадной трубой или стволом скважины, и может состоять или включать один или несколько преобразователей, тензометров и/или других устройств для обнаружения изменения давления или иными образом реагировать на давление. Датчик давления 708b в обсадной колонне может быть присоединен к обсадной трубе, бурильной колонне и/или другому компоненту устройства 700 или буровой установки, и может быть установлен на или вблизи поверхности ствола скважины, долота ниже поверхности, или в глубине ствола скважины.
Датчик положения заслонки 708с используется для обнаружения, открыта или закрыта заслонка, и также может использоваться для определения степени частичного открытия или закрытия заслонки. Датчик положения заслонки 708с может быть соединен или составлять одно целое с заслонкой, приводом заслонки и/или другим компонентом устройства 700 или буровой установки.
Датчик нагрузки 708d в точке крепления неподвижного конца используется для определения натяжения бурового каната около закрепленного конца. Он может включить один или несколько преобразователей, тензометров и/или другие датчики, соединенные с буровым канатом.
Кодирующее устройство лебедок 708е используется для определения вращательного положения барабанов лебедок, на которые намотан буровой канат. Оно может включить одно или несколько оптических кодирующих устройств, интерферометры и/или другие датчики, предназначенные для определения углового положения барабана и/или любого изменения в угловом положении барабана. Кодирующее устройство лебедок 708е может включать один или несколько компонентов, соединенных или составляющих одно целое с барабаном и/или неподвижной частью лебедок.
Датчик давления 708f бурового раствора используется для определения давления гидравлической жидкости, создаваемого гидравлическим забойным двигателем, и может включать один или несколько преобразователей, тензометров и/или других устройств для обнаружения давление жидкости. Он может быть соединен или составлять одно целое с буровым насосом и, таким образом, находиться около поверхностного устья ствола скважины.
Гравитационный датчик 708g скважинного инструмента MWD используется для обнаружения ориентации скважинного инструмента, на основе силе тяжести. Магнитный датчик 708h скважинного инструмента MWD используется для обнаружения ориентации скважинного инструмента, на основе магнитного поля. Эти датчики 708g и 708h могут быть соединены с оборудованием MWD или составлять одно целое с ним и устанавливаются в забое скважины.
Датчик расхода 708i возвратной линии используется для определения расхода бурового раствора возвратной линии, и его показания могут быть выражены в галлонах/минуту. Датчик плотности 708j бурового раствора возвратной линии используется для определения массы бурового раствора, текущего через возвратную линию. Эти датчики 708i и 708j могут быть соединены с возвратной линией и, таким образом, могут быть установлены на или около устья ствола скважины.
Кодирующее устройство верхнего привода 708k используется для определения вращательного положения полого вала. Оно может включить одно или несколькими оптических кодирующих устройств, интерферометры и/или другие датчики, предназначенные для определения углового положения полого вала и/или любого изменения в угловом положении полого вала, верхнего привода относительно истинного северного полюса или некоторой другой неподвижной контрольной точки. Датчик крутящего момента 708l верхнего привода используется для определения крутящего момента, создаваемого верхним приводом, или крутящего момента, необходимого для вращения полого вала или бурильной колонны по существующим нормативам. Эти датчики 708k и 708l могут быть соединены с верхним приводом или составлять одно целое с ним.
Привод заслонки 708m используется для поворота заслонки в открытое состояние, закрытое состояние, и/или в одно или несколько положений между полностью открытым и полностью закрытым состояниями. Привод может быть гидравлическим, пневматическим, механическим, электрическим или их комбинацией.
Двигатель лебедок 708n используется для подачи электрического сигнала двигателю лебедок 708о и приведения их в действие. Двигатель лебедок 708о используется для вращения барабана, на который намотан буровой канат, таким образом, поднимая или опуская буровой снаряд.
Двигатель бурового насоса 708р используется для подачи электрического сигнала буровому насосу, управляя, таким образом, расходом и/или давлением с выхода бурового насоса. Верхний привод двигателя 708q используется для подачи электрического сигнала верхнему приводу двигателя 708r для привода его в действие. Верхний привод двигателя 708r используется для вращения полого вала, вращая, таким образом, бурильную колонну, прикрепленную к полому валу.
В примере осуществления изобретения, показанном на фигуре 7, данные 706, которые передаются между устройствами 708 и процессорами 704, включают:
положение блока 706а;
давление в обсадной колонне 706b;
положение заслонки 706с;
нагрузку на крюке 706d;
давление бурового раствора 706е;
ход/фазу бурового насоса 706f;
плотность бурового раствора 706g;
положение полого вала 706h;
противоток 706i;
скважинный инструмент 706j;
крутящий момент верхнего привода 706k;
сигнал 706l, воздействующий на заслонки;
сигнал 706m, воздействующий на лебедки;
сигнал 706n, воздействующий на буровой насос;
сигнал 706о, воздействующий на верхний привод; и
сигнал 706р ограничения крутящего момента верхнего привода.
Однако данные 706, переданные между устройствами 708 и процессорами 704, могут включать дополнительные или альтернативные данные в объеме настоящего изобретения.
В примере осуществления изобретения, показанном на фигуре 7, процессоры 704 включают:
контроллер заслонки 704а;
контроллер барабана 704b;
контроллер бурового насоса 704с;
контроллер колебаний 704d;
контроллер положения полого вала 704е;
контроллер скважинного инструмента 704f;
вычислитель MSE 704i;
вычислитель давления 704k;
вычислитель ROP 704l;
вычислитель истинной глубины скважины 704m;
вычислитель WOB 704n;
детектор скачкообразного движения 704о; и
каротажный журнал 704р.
Однако процессоры 704 могут включать дополнительные или альтернативные контроллеры, вычислительные устройства, детекторы, устройства для хранения данных и/или другие процессоры в объеме настоящего изобретения.
Контроллер заслонки 704а используется для контроля забойного давления от датчика давления на входе 702а, давления в обсадной колонне 706b от датчика давления 708b в обсадной колонне, положения заслонки 706с от датчика положения заслонки 708с и плотности бурового раствора 706g от датчика плотности бурового раствора 708j возвратной линии. Контроллер заслонки 704а также может получить данные забойного давления от вычислителя давления 704k. Альтернативно процессоры 704 могут включать компаратор, сумматор или другое устройство, которое выполняет алгоритм, используя величину забойного давления, полученную от входа забойного давления 702а, и текущее забойное давление, полученное от вычислителя давления 704k с результатом такого алгоритма, передаваемого контроллеру заслонки 704а вместо установленного забойного давления и/или в дополнение к текущему забойному давлению. Контроллер заслонки 704а используется для обработки полученных данных и формирования сигнала 706l, воздействующего на заслонки, который затем передается на привод заслонки 708.
Например, если текущее забойное давление превышает установленную величину забойного давления, то сигнал 706l может воздействовать на привод заслонки 708m, открывая заслонку и увеличивая, таким образом, расход возвратного потока и уменьшая текущее забойное давление. Точно так же, если текущее забойное давление становится ниже установленной величины забойного давления, то сигнал 706l, действующий на привод заслонки 708m, может закрыть заслонку и, таким образом, уменьшить расход возвратного потока, увеличивая текущее забойное давление. Воздействие на привод заслонки 708m может быть возрастающим с тем, чтобы сигнал 706l несколько раз открывал заслонку 708m, или открывал заслонку на предопределенную величину до текущего забойного давления, удовлетворительно выполняя задачу установки нужной величины забойного давления. Альтернативно сигнал 706l, воздействующий на заслонки, может действовать на привод заслонки 708m
так, чтобы открыть заслонку на величину, пропорциональную текущей разнице между текущим забойным давлением и установленной величиной забойного давления.
Контроллер заслонки 704а может содержать или составлять, по меньшей мере, часть, или иными образом быть выполнять операции и/или иметь, в основном, подобные вводы и выводы данных относительно контроллера 190, показанного на фигуре 1, контроллера 325, показанного на фигуре 3, контроллера 420, показанного на фигурах 4А и 4В, и/или контроллера 598, показанного на фигуре 5В.
Контроллер барабана 704b используется для приема установленного значения ROP от входа заданных значений ROP 702l, так же как текущего значения ROP от вычислителя ROP 704l. Контроллер барабана 704b также используется для приема данных нагрузки на долото от компаратора, сумматора или другого устройства, которое выполняет алгоритм, используя контрольную точку WOB от входа источника WOB 702g и текущую нагрузку на долото от вычислителя WOB 704n. Эти данные нагрузки на долото могут быть изменены на основе текущих данных MSE. Альтернативно контроллер барабана 704b используется для приема контрольной точки WOB от входа источника WOB 702g и текущей нагрузки на долото непосредственно от вычислителя WOB 704n, и затем выполняет сравнение WOB или алгоритм сумматора. Контроллер барабана 704b также используется для приема данных ΔР от компаратора, сумматора или другого устройства, которое выполняет алгоритм, используя опорную величину ΔР, полученную от входа 702d опорной величины ΔР, и текущую величину ΔР, полученную от одного из процессоров 704, который используется для определения текущего ΔР. Текущая величина ΔР может быть скорректирована для учета давления в обсадной колонне 706b.
Контроллер барабана 704b используется для обработки полученных данных и формирования сигнала 706m, воздействующего на лебедки, который затем передается на двигатель лебедок 708n. Например, если величина текущей нагрузки на долото, полученная от вычислителя 704n источника WOB, меньше заданной величины WOB, полученной от входа источника WOB 702q, то сигнал, воздействующий на лебедки 706m, может инициировать привод лебедок 708n на работу двигателя лебедок 708о в сторону стравливания бурового каната. Если текущая нагрузка на долото отклоняется больше заданной величины WOB, то сигнал, воздействующий на лебедок 706m, может инициировать привод лебедок 708n на работу двигателя лебедок 708о в сторону наматывания бурового каната на барабан.
Если текущая механическая скорость проходки (ROP), полученная от вычислителя ROP 704l, меньше ROP, полученной от входа заданных значений ROP 702l, то сигнал, воздействующий на лебедки 706m, может инициировать привод лебедок 708n, на работу двигателя лебедок 708о в направлении стравливания бурового каната. Если текущая ROP больше заданной величины ROP, то сигнал, воздействующий на лебедки 706m, может инициировать привод лебедок 708n на работу двигателя лебедок 708о на сматывание бурового каната.
Если текущий ΔР меньше опорной величины ΔР, полученной от входа 702d ΔР, то сигнал, воздействующий на лебедки 706m, может инициировать привод лебедок 708n на работу двигателя лебедок 708о в направлении стравливания бурового каната. Если текущий ΔР больше опорной величины ΔР, то сигнал, воздействующий на лебедки 706m, может инициировать привод лебедок 708n на работу двигателя лебедок 708о на сматывание бурового каната.
Контроллер барабана 704b может содержать или составлять, по меньшей мере, часть, или иными образом, в основном, быть подобным по принципу работы и/или иметь, в основном, подобные входы и выходы данных по отношению к контроллеру 190, показанному на фигуре 1, контроллеру 325, показанному на фигуре 3, контроллеру лебедок 420b, показанному на фигурах 4А и 4В, и/или контроллеру 598, показанному на фигуре 5В.
Контроллер бурового насоса 704с используется для приема данных хода/фазы бурового насоса 706f, давления бурового раствора 706е от датчика давления 708f бурового раствора, текущего ΔР, текущего MSE от вычислителя MSE 704i, текущего ROP от вычислителя ROP 704l, индикатора скачкообразного движения от датчика скачкообразного движения 704о и заданного значения расхода бурового раствора от входа 702h заданных значений расхода бурового раствора. Контроллер бурового насоса 704с затем использует эти данные, чтобы сформирования сигнал 706n, воздействующий на буровой насос, который затем передается на буровой насос 708р.
Контроллер бурового насоса 704с может содержать или составлять, по меньшей мере, часть, или иными образом, в основном, быть подобным по принципу работы и/или иметь, в основном, подобные входы и выходы данных, по отношению к контроллеру 190, показанному на фигуре 1, контроллеру 325, показанному на фигуре 3, контроллеру 420, показанному на фигуре 4А, контроллеру 420с бурового насоса, показанному на фигуре 4В, и/или контроллеру 598, показанному на фигуре 5В.
Контроллер колебаний 704d используется для приема текущего положения 706n полого вала, текущего крутящего момента верхнего привода 706k, индикатора скачкообразного движения от датчика скачкообразного движения 704о, текущей ROP от вычислителя ROP 704l и предельной амплитуды колебания полого вала от входов 702j и 702k. Контроллер колебаний 704d затем использует эти данные для формирования входа на контроллер положения полого вала 704е для формирования сигнала 706о, воздействующего на верхний привод. Например, если индикатор скачкообразного движения от датчика скачкообразного движения 704о указывает, что происходит скачкообразное движение, сигнал, сформированный контроллером колебаний 704d, может указывать на то, что амплитуда колебаний начинает увеличиваться по амплитуде.
Контроллер колебаний 704d может содержать или составлять, по меньшей мере, часть, или иными образом, в основном, быть подобным по принципу работы и/или иметь, в основном, подобные входы и выходы данных, по отношению к контроллеру 190, показанному на фигуре 1, контроллеру 325, показанному на фигуре 3, контроллеру 420, показанному на фигурах 4А и 4В, и/или контроллеру 598, показанному на фигуре 5В.
Контроллер положения полого вала 704е используется для приема сигнала от контроллера колебаний 704d, заданного значения RPM верхнего привода, от входа RPM верхнего привода 702о, сигнал от контроллера скважинного инструмента 704f, текущей нагрузки на долото от вычислителя WOB 704n, и текущего скважинного инструмента 706j, по меньшей мере, от одного из датчиков MWD скважинного инструмента 708g и 708h. Контроллер положения полого вала 704е также может использоваться для приема предела крутящего момента верхнего привода от входа предела крутящего момента верхнего привода 702р, хотя эта заданная величина может быть настроена компаратором, сумматором или другим устройством, чтобы учесть текущую MSE, причем величина текущей MSE принимается от вычислителя MSE 704i. Контроллер положения полого вала 704е также может использоваться для приема индикатора скачкообразного движения от датчика скачкообразного движения 704о. Контроллер положения полого вала 704е затем использует эти данные для формирования сигнала 706о, воздействующего на верхний привод.
Например, сигнал 706о, воздействующий на верхний привод, инициирует верхний привод двигателя 708q на включение двигателя 708r для вращения полого вала со скоростью, обозначенной входом RPM верхнего привода 702о. Однако это произойдет, только если другие входы не отменяют это действие. Например, если управляющий сигнал от контроллера колебаний 704d, воздействующий на верхний привод 706о, также приведет к тому, что верхний привод 708q вызовет вращательное колебание полого вала двигателем 708r. Дополнительно, сигнал от контроллера скважинного инструмента 704d может отменить или иными образом повлиять на сигнал 706о, воздействующий на верхний привод, чтобы вращательно ориентировать полый вал в определенном статическом положении или установить нейтральную точку для колебаний.
Контроллер положения полого вала 704е может содержать или составлять, по меньшей мере, часть, или иными образом, в основном, быть подобным по принципу работы и/или иметь, в основном, подобные входы и выходы данных, по отношению к контроллеру 190, показанному на фигуре 1, контроллеру 325, показанному на фигуре 3, контроллеру 420, показанному на фигурах 4А и 4В, и/или контроллеру 598, показанному на фигуре 5В.
Контроллер скважинного инструмента 704f используется для приема заданной величины положения скважинного инструмента от входа 702n положения скважинного инструмента, так же как величины текущего положения скважинного инструмента 706j, по меньшей мере, от одного из датчиков MWD скважинного инструмента 708g и 708h. Контроллер скважинного инструмента 704f также может использоваться для приема данных ΔР. Контроллер скважинного инструмента 704f затем использует эти данные для формирования сигнала, который передается контроллеру положения полого вала 704е.
Контроллер скважинного инструмента 704f может содержать или составлять, по меньшей мере, часть, или иными образом, в основном, быть подобным по принципу работы и/или иметь, в основном, подобные входы и выходы данных, по отношению к контроллеру 190, показанному на фигуре 1, контроллеру 325, показанному на фигуре 3, контроллеру 420, показанному на фигурах 4А и 4В, и/или контроллеру 598, показанному на фигуре 5В.
Вычислитель MSE 704i используется для приема текущих данных RPM от главного входа RPM двигателя 702о, крутящего момента верхнего привода 706k от датчика крутящего момента верхнего привода 708l и текущей нагрузки на долото от вычислителя WOB 704n. Вычислитель MSE 704i затем использует эти данные, чтобы вычислить величину текущей MSE, которая затем передается на контроллер барабана 704b, контроллер положения полого вала 704е и контроллер бурового насоса 704с. Вычислитель MSE 704i также может использоваться для получения данных о предельной MSE, поступающих с входа предела MSE 702f, и вычислитель MSE 704i также может использоваться для сравнения текущего значения MSE с заданной величиной предела MSE и подать аварийный сигнал, если текущая MSE превышает заданную величину максимальной MSE. Вычислитель MSE 704i также может использоваться для приема целевого значения MSE с входа целевого значения MSE 702g, и вычислитель MSE 704i также может использоваться для формирования сигнала, указывающего на разницу между текущей MSE и целевой MSE. Этот сигнал может быть использован одним или несколькими процессорами 704, чтобы скорректировать различные значения данных, используемых таким образом, например, настроить текущие или опорные данные нагрузки WOB, используемые контроллером барабана 704b и/или заданной величины предела крутящего момента верхнего привода, используемого контроллером положения полого вала 704е, как описано выше.
Вычислитель MSE 704i может содержать или составлять, по меньшей мере, часть, или иными образом, в основном, быть подобным по принципу работы и/или иметь, в основном, подобные входы и выходы данных, по отношению к контроллеру 190, показанному на фигуре 1, контроллеру 325, показанному на фигуре 3, контроллеру 420, показанному на фигурах 4А и 4В, и/или контроллеру 598, показанному на фигуре 5В.
Вычислитель давления 704k используется для определения давления в обсадной колонне 706b от датчика давления 708b в обсадной колонне, давления бурового раствора 706е от датчика давления 708f бурового раствора, плотности бурового раствора от датчика плотности бурового раствора 706g возвратной линии 708j и фактической вертикальной глубины от вычислителя истинной глубины скважины 704m. Вычислитель давления 704k затем использует эти данные, чтобы вычислить текущее забойное давление, которое затем передается контроллеру 704а дроссельной заслонки. Однако до передачи контроллеру заслонки 704а текущее забойное давление может быть сравнено с заданной величиной забойного давления, полученной от входа забойного давления 702а, при этом контроллер заслонки 704а может использовать только разницу между текущим забойным давлением и заданной величиной забойного давления, формируя сигнал 706l, воздействующий на заслонки. Это сравнение между текущим забойным давлением и заданной величиной забойного давления может быть выполнено вычислителем давления 704k, контроллером заслонки 704а или другим процессором 704.
Вычислитель давления 704k может содержать или составлять, по меньшей мере, часть, или иными образом, в основном, быть подобным по принципу работы и/или иметь, в основном, подобные входы и выходы данных, по отношению к контроллеру 190, показанному на фигуре 1, контроллеру 325, показанному на фигуре 3, контроллеру 420, показанному на фигурах 4А и 4В, и/или контроллеру 598, показанному на фигуре 5В.
Вычислитель ROP 704l используется для приема данных положения блока 706а от положения блока 708а и затем использует эти данные, чтобы вычислить текущую ROP. Текущая ROP затем передается на вычислитель истинной глубины скважины 704m, контроллер барабана 704b, контроллер бурового насоса 704с и контроллер колебаний 704d. Вычислитель ROP 704l может содержать или составлять, по меньшей мере, часть, или иными образом, в основном, быть подобным по принципу работы и/или иметь, в основном, подобные входы и выходы данных, по отношению к контроллеру 190, показанному на фигуре 1, контроллеру 325, показанному на фигуре 3, контроллеру 420, показанному на фигурах 4А и 4В, и/или контроллеру 598, показанному на фигуре 5В.
Вычислитель истинной глубины скважины 704m используется для приема данных о текущем скважинном инструменте 706j, по меньшей мере, от одного из датчиков MWD 708g скважинного инструмента и каротажного журнала 704р о текущей измеренной глубине, которая вычислена из текущей скорости ROP, полученной от вычислителя ROP 704l. Вычислитель истинной глубины скважины 704m затем использует эти данные, чтобы вычислить фактическую вертикальную глубину, которая затем передается на вычислитель давления 704k. Вычислитель истинной глубины скважины 704m может содержать или составлять, по меньшей мере, часть, или иными образом, в основном, быть подобным по принципу работы и/или иметь, в основном, подобные входы и выходы данных, по отношению к контроллеру 190, показанному на фигуре 1, контроллеру 325, показанному на фигуре 3, контроллеру 420, показанному на фигурах 4А и 4В, и/или контроллеру 598, показанному на фигуре 5В.
Вычислитель WOB 704n используется для приема индикатора скачкообразного движения от датчика скачкообразного движения 704о, так же как данных текущей нагрузки на крюке 706d от датчика груза крепления неподвижного конца 708d. Вычислитель WOB 704n также может использоваться для приема данных тарировки веса поднятой бурильной колонны, которая может представлять разницу между тарировкой WOB, полученной от входа тарировки WOB 702r и текущей нагрузкой на крюке 706d, полученный от датчика груза, прикрепленного к неподвижному концу 708d. В любом случае, вычислитель WOB 704n используется для вычисления текущей нагрузки на долото на основе текущей нагрузке на крюке, текущем весе бурильной колонны, и индикатора скачкообразного движения. Текущая нагрузка на долото затем передается на контроллер положения полого вала 704е, вычислитель d-экспоненты 704g, вычислитель 704h коррекции d-экспоненты, вычислитель MSE 704i и контроллер барабана 704b.
Вычислитель WOB 704n может содержать или составлять, по меньшей мере, часть, или иными образом, в основном, быть подобным по принципу работы и/или иметь, в основном, подобные входы и выходы данных, по отношению к контроллеру 190, показанному на фигуре 1, контроллеру 325, показанному на фигуре 3, контроллеру 420, показанному на фигурах 4А и 4В, и/или контроллеру 598, показанному на фигуре 5В.
Детектор скачкообразного движения 704о предназначен для приема данных о текущем крутящем моменте верхнего привода 706k и использует эти данные для формирования индикатора скачкообразного движения, который затем передается на контроллер бурового насоса 704с, контроллер колебаний 704d и контроллер положения полого вала 704е. Детектор скачкообразного движения 704о измеряет изменения крутящего момента верхнего привода 706k по отношению к времени, которое служит показателем того, демонстрирует ли буровое долото скачкообразное движение, указывая, что крутящий момент верхнего привода и/или WOB должен быть уменьшен, или амплитуда колебаний полого вала должна быть изменена. Детектор скачкообразного движения 704о может содержать или составлять, по меньшей мере, часть, или иными образом, в основном, быть подобным по принципу работы и/или иметь, в основном, подобные входы и выходы данных, по отношению к контроллеру 190, показанному на фигуре 1, контроллеру 325, показанному на фигуре 3, контроллеру 420, показанному на фигурах 4А и 4В, и/или контроллеру 598, показанному на фигуре 5В.
Процессоры 704 могут быть скомпонованы в единый блок обработки данных или состоять из множества отдельных устройств обработки данных. Каждый процессор 704 может включать одно или несколькими программных модулей или другие модули программного продукта, подмодули, приложения, подпрограммы, конечные автоматы, алгоритмы. Каждый процессор 704 может дополнительно включать одно или несколько устройств машинной памяти или другие средства для хранения цифровых данных. Цели одного или нескольких процессоров 704 могут быть, в основном, подобны описанным здесь в отношении любого контроллера или другого устройства обработки данных.
На фигуре 8 представлена примерная система 800 для осуществления одного или нескольких вариантов устройств и/или способов, описанных выше или иными образом осуществляемых в объеме настоящего изобретения. Система 800 включает процессор 802, входное устройство 804, запоминающее устройство 806, видеоконтроллер 808, память системы 810, дисплей 814 и устройство связи 816, причем все эти устройства соединены одной или несколькими шинами 812. Запоминающее устройство 806 может быть накопителем на гибких дисках, жестким диском, компакт-диском, DVD, оптическим приводом или любым другим видом запоминающего устройства. Кроме того, запоминающее устройство 806 может быть принимать дискеты, компакт-диски, DVD или любую другую считываемую компьютером среду, которая может содержать выполняемые компьютером команды. Устройство связи 816 может быть модемом, сетевой платой или любым другим устройством, позволяющим системе 800 общаться с другими системами, осуществляется ли такая связь через проводную или беспроводную линию связи.
Компьютерная система обычно включает, по меньшей мере, аппаратные средства, способные выполнять машиночитаемые команды, так же как программное обеспечение для выполнения действий (обычно машиночитаемые команды), которые приводят к желательному результату. Кроме того, компьютерная система может включать гибриды аппаратных средств и программного обеспечения, так же как компьютерных подсистем.
Аппаратные средства, в основном, включают, по меньшей мере, процессорные платформы, такие как машины клиента (также известные как персональные компьютеры или серверы) и переносные устройства обработки данных (такие как смартфоны, персональные помощники и вычислительные устройства (например, персональные устройства связи). Кроме того, аппаратные средства обычно включают любое физическое устройство, которое способно к сохранению машиночитаемых команд, такие как память или другие запоминающие устройства. Другие виды аппаратных средств содержат подсистемы аппаратных средств, включая устройства привода, такие как модемы, карты модема, перфораторы и карты. Аппаратные средства также могут включать, по меньшей мере, по настоящему изобретению мультимодальные технологии, например, устройства и/или системы, позволяющие пользователям использовать многократные формы входа и выхода, включая голосовой вход, клавиатуру и перо, используемые попеременно в том же самом приложении или интерфейсе.
Программное обеспечение может включать любой машинный код, хранящийся в любой среде памяти, например, RAM или ROM, машинный код, записанный на других устройствах (таких как дискеты, компакт-диски или DVD), и может включать выполнимый код, операционную систему, так же как источник или код объекта. Кроме того, программное обеспечение может включать любой набор команды, выполняемых в машине клиента или на станции, и, в этой форме, часто называемой программой или выполнимым кодом.
Гибриды (комбинации программного обеспечения и оборудования) получают все большее распространение как устройства, обеспечивающие повышенную функциональность и работу в компьютерных системах. Гибрид может быть создан в том случае, когда традиционное программное обеспечение непосредственно встроено в кремниевый чип - это возможно, так как программное обеспечение может быть собрано и компилировано в единицы и нули, точно так же единицы и нули могут быть представлены непосредственно в кремнии. Как правило, гибрид (изготовленные аппаратные средства) разрабатывается, чтобы функционировать без дополнительных программ. Соответственно, следует подразумевать, что гибриды и другие комбинации аппаратных средств и программного обеспечения также включены здесь в определения компьютерной системы и, таким образом, предполагаются в настоящем изобретении как возможные эквивалентные структуры и эквивалентные способы.
Среды, считываемые компьютером, могут включать пассивное хранение данных, такое как память с произвольным доступом (RAM), так же как полупостоянное хранение данных, такое как компакт-диск или DVD. Кроме того, пример осуществления настоящего изобретения может быть воплощен в ОЗУ компьютера и эффективно трансформировать стандартный компьютер в новый конкретный компьютер.
Структуры данных определяются организацией данных, которая может составить пример осуществления настоящего изобретения. Например, структура данных может обеспечить организацию данных или организацию выполнимого кода (исполнимой программы). Кроме того, сигналы данных проходят через передающую среду, которая сохраняет и транспортирует различные структуры данных и, таким образом, может использоваться, чтобы транспортировать вариант осуществления изобретения. Здесь следует отметить, что действия с одинаковыми наименованиями могут быть совершены одинаковым образом, если не заявлено особо.
Контроллеры и/или системы по настоящему изобретению могут быть разработаны для управления любой определенной архитектурой. Например, контроллеры и/или системы могут быть выполнены на одном или несколькими компьютерах, местных сетях связи, местных вычислительных сетях, глобальных сетях Интернет и Интранет, переносных и других портативных и беспроводных устройствах и сетях.
С учетом вышеописанного и фигур 1-7 квалифицированные специалисты должны признать, что настоящее изобретение представляет способы и устройства на основе операций MSE и/или оптимизации. В частности, один примерный способ включает обнаружение параметров MSE, использование параметров MSE для вычисления MSE и настройки рабочих параметров как функции расчетной MSE.
Другой примерный способ в объеме настоящего изобретения включает определение базового значения MSE изменение WOB, работу в течение определенного времени или на определенную глубину проходки, определение обновленного значения MSE, вытекающего из работу буровой установки в течение определенного времени, используя измененную WOB и затем поддерживая измененную WOB или снижая предыдущую WOB как функцию обновленной MSE. Такой способ также может включить определение другой основной MSE, изменяя RPM, работу буровой установки в течение определенного времени или на определенную глубину, определяя обновленную MSE, полученную в результате работы в течение определенного времени или на определенную глубину, используя измененную RPM, и затем либо поддерживая измененную RPM или снижая предыдущую RPM как функцию обновленной MSE.
Другой примерный способ в объеме настоящего изобретения включает определение базовой MSE, снижение WOB, работу в течение определенного времени или на определенную глубину, определение обновленного значения MSE, вытекающего из работы в течение определенного времени, используя измененную WOB и затем поддерживая измененную WOB или снижая предыдущую WOB как функцию обновленной MSE. Этот способ может дополнительно включать определение другой основной MSE, работая в течение определенного времени со сниженной RPM, и затем либо поддерживая измененную RPM, либо снижая предыдущую RPM как функцию обновленной MSE. Способ также может дополнительно включить определение другой базовой MSE, повышая RPM, работая в течение определенного времени или на определенную глубину, определяя обновленную MSE, полученную в результате работы в течение определенного времени на повышенной скорости RPM, и затем либо поддерживая измененную RPM, либо снижая предыдущую RPM как функцию обновленной MSE.
Настоящее изобретение также представляет устройство или систему для работы на основе MSE и/или оптимизации, включающую средство для обнаружения параметров MSE, средство для использования обнаруженных параметров MSE для расчета MSE и средство для настройки рабочих параметров как функции расчетного MSE.
Другое примерное устройство или система в объеме настоящего изобретения содержит средство для определения базовой MSE, средство для изменения WOB, средство для работы в течение определенного времени или на определенную глубину проходки, средство для определения обновленной MSE в результате работы в течение определенного времени, используя измененную WOB, и средство для поддержания измененной WOB или для восстановления предыдущей WOB как функции обновленной MSE. Такое устройство или система могут дополнительно включать средство для определения другой базовой MSE, средство для изменения RPM, средство для работы в течение определенного времени или на определенную глубину проходки, средство для определения обновленной MSE в результате работы в течение определенного времени, используя измененный RPM и средство для поддержания измененной RPM или для снижения предыдущий RPM как функции обновленной MSE.
Еще одно примерное устройство или система в объеме настоящего изобретения содержит средство для определения базовой MSE, средство для изменения WOB, средство для работы в течение определенного времени или на определенную глубину проходки, средство для определения обновленной MSE в результате работы в течение определенного времени, используя сниженную WOB, и средство для поддержания измененной WOB или для восстановления предыдущей WOB как функции обновленной MSE. Такое устройство или система могут дополнительно включить средство для определения другой базовой MSE, средство для увеличения WOB, средство для работы в течение определенного времени или на определенную глубину проходки, средство для определения обновленной MSE в результате работы в течение определенного времени, используя увеличенную WOB, и средство для поддержания увеличенной WOB или для восстановления предыдущей WOB как функции обновленной MSE. Устройство или система могут дополнительно включать средство для определения другой базовой MSE, средство для изменения RPM, средство для работы в течение определенного времени или на определенную глубину проходки, средство для определения обновленной MSE в результате работы в течение определенного времени, используя сниженную RPM, и средство для поддержания сниженной RPM или для восстановления предыдущий RPM как функции обновленной MSE. Устройство или система могут дополнительно включить средство для определения другой базовой MSE, средство для увеличения RPM, средство для работы в течение определенного времени или на определенную глубину проходки, средство для определения обновленной MSE в результате работы в течение определенного времени, используя увеличенную RPM, и средство для поддержания увеличенный RPM или для восстановления предыдущую RPM как функции обновленной MSE.
Одно или несколько описанных выше примерных устройств или систем могут содержать устройство 100, показанное на фигуре 1, устройство 300, показанное на фигуре 3, устройство 400а, показанное на фигуре 4А, устройство 400b, показанное на фигуре 4В, устройство 590, показанное на фигуре 5В, устройство 700, показанное на фигуре 7, и/или их компоненты. Одно или несколько описанных выше примерных устройств или систем могут быть реализованы как программный продукт. Например, один вариант такого программного продукта может включать машиночитаемую среду и средство, записанные на машиночитаемой среде для обнаружения параметров MSE использования параметров MSE для вычисления MSE и настройки рабочих параметров как функции расчетного MSE.
Другой примерный программный продукт в объеме настоящего изобретения включает машиночитаемую среду и средство, записанное на машиночитаемой среде для определения базовой MSE, изменения WOB, работу в течение определенного времени или на определенную глубину проходки, определение обновленной MSE в результате работы в течение определенного времени, используя измененную WOB и затем поддерживая измененную WOB или восстановления предыдущую WOB как функцию обновленной MSE. Такой программный продукт также может включать средство, записанные на машиночитаемой среде для определения другой базовой MSE, изменения RPM, работу в течение определенного времени или на определенную глубину проходки, определение обновленной MSE в результате работы в течение определенного времени, используя измененную RPM, с последующим поддержанием измененный RPM или восстановлением предыдущей RPM как функции обновленной MSE.
Другой примерный программный продукт в объеме настоящего изобретения включает машиночитаемую среду и средство, записанное на машиночитаемой среде для определения базовой MSE, снижения WOB, работы в течение определенного времени или на определенную глубину проходки, определение обновленной MSE в результате работы в течение определенного времени, используя сниженную WOB, и поддержание сниженной WOB или восстановление предыдущей WOB как функции обновленной MSE. Такой программный продукт также может включать средство, записанное на машиночитаемой среде для определения другой базовой MSE, увеличение WOB, работы в течение определенного времени или на определенную глубину проходки, определение обновленной MSE в результате работы в течение определенного времени, используя увеличенный WOB, и поддержание увеличенной WOB или восстановление предыдущей WOB как функции обновленной MSE. Программный продукт также может включать средство, записанное на машиночитаемой среде для определения другой базовой MSE путем снижения RPM при работе в течение определенного времени или на определенную глубину проходки, определяя обновленную MSE в результате работы в течение определенного времени, используя сниженную RPM, и поддержание сниженной RPM или восстановление предыдущей RPM как функции обновленной MSE. Программный продукт также может включать средство, записанное на машиночитаемой среде для определения другой базовой MSE, увеличение RPM, работу в течение определенного времени или на определенную глубину проходки, определение обновленной MSE в результате работы в течение определенного времени, используя увеличенный RPM, и поддержание увеличенной RPM или восстановление предыдущей RPM как функции обновленной MSE.
Кроме того, способы в объеме настоящего изобретения могут быть по своей природе местными или удаленными. Например, такие способы могут быть развернуты или выполнены через PLC, РАС, PC, одного или нескольких серверов, рабочие столы, карманные компьютеры и/или любую другой тип вычислительного устройства соответствующей производительности.
В предшествующем описании приведены несколько примеров осуществления настоящего изобретения с тем, чтобы квалифицированные специалисты могли лучше его понять. Квалифицированные специалисты понимают, что они могут использовать настоящее изобретение как основу для проектирования или изменения других процессов и конструкций, чтобы достичь тех же самых целей и/или преимуществ рамках представленных здесь примеров осуществления. Квалифицированные специалисты также понимают, что такие эквивалентные конструкции не выходят из объема настоящего изобретения, и что они могут сделать различные изменения, замены и модификации, не выходя из объема настоящего изобретения.
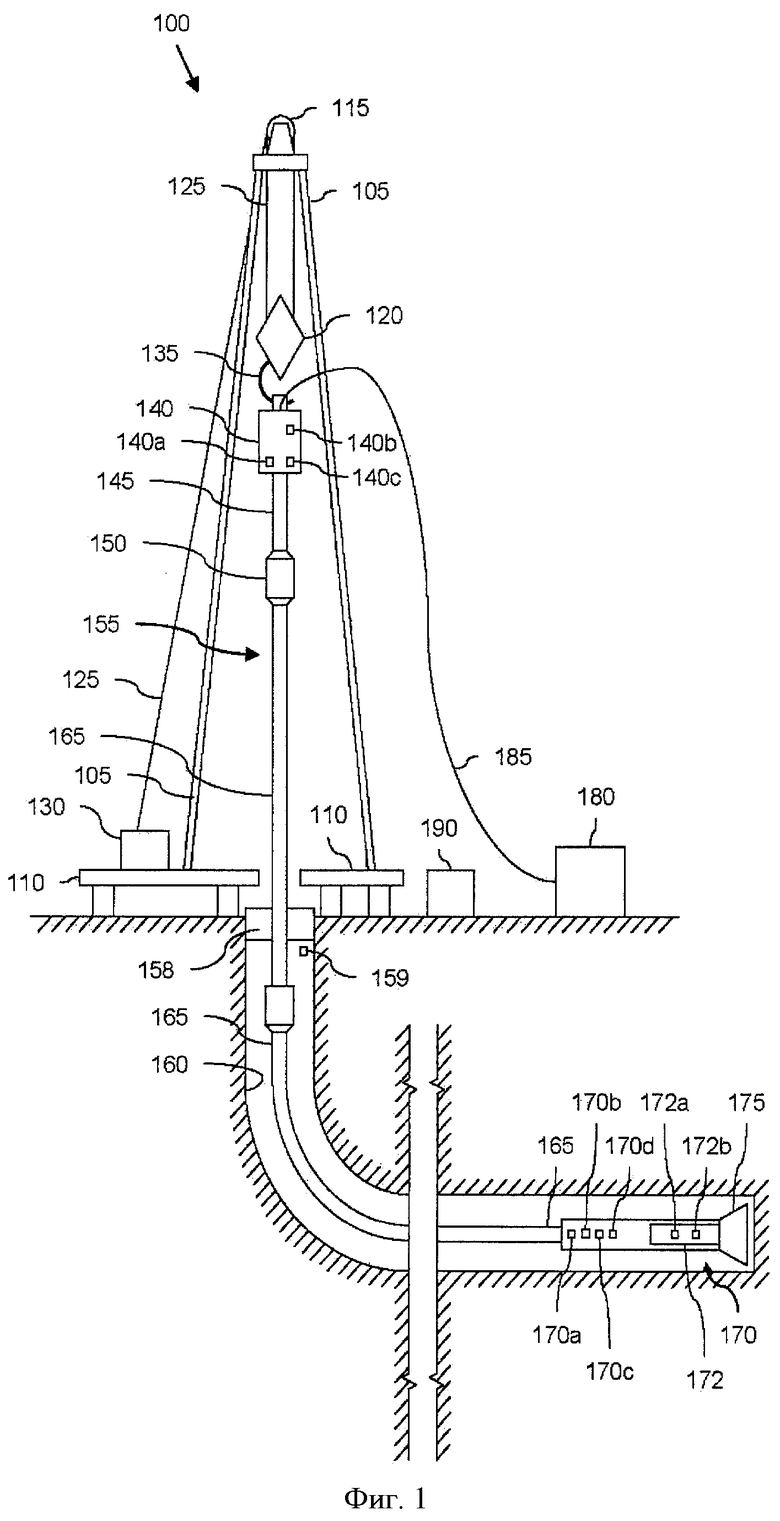
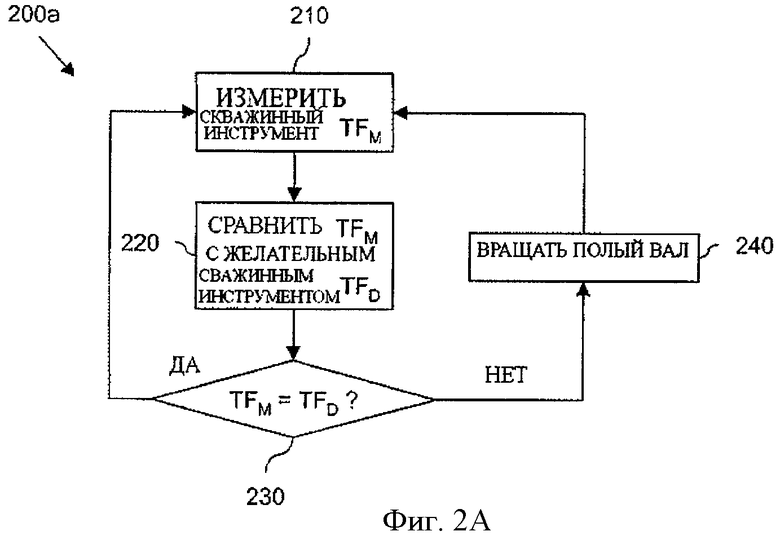
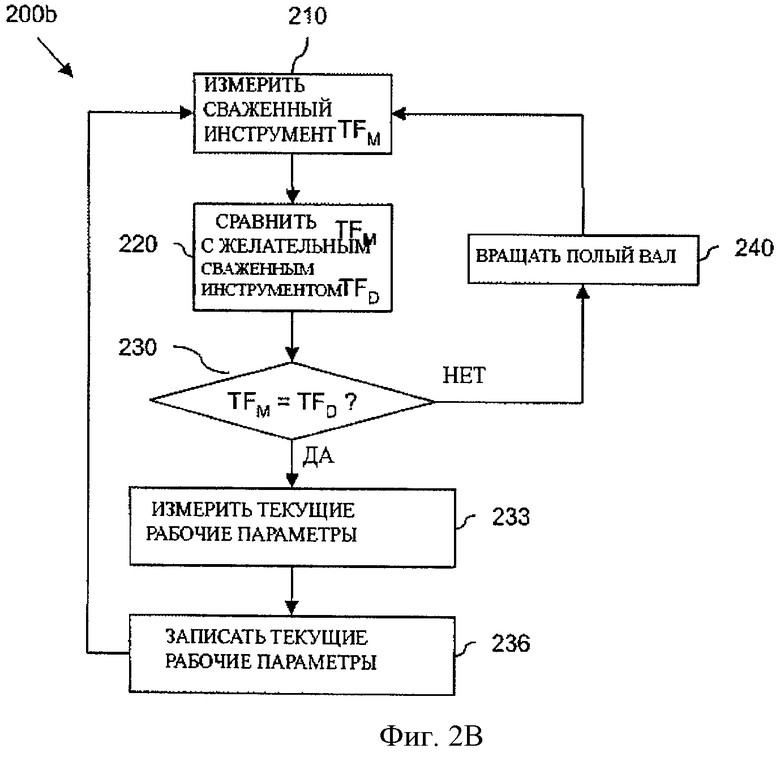
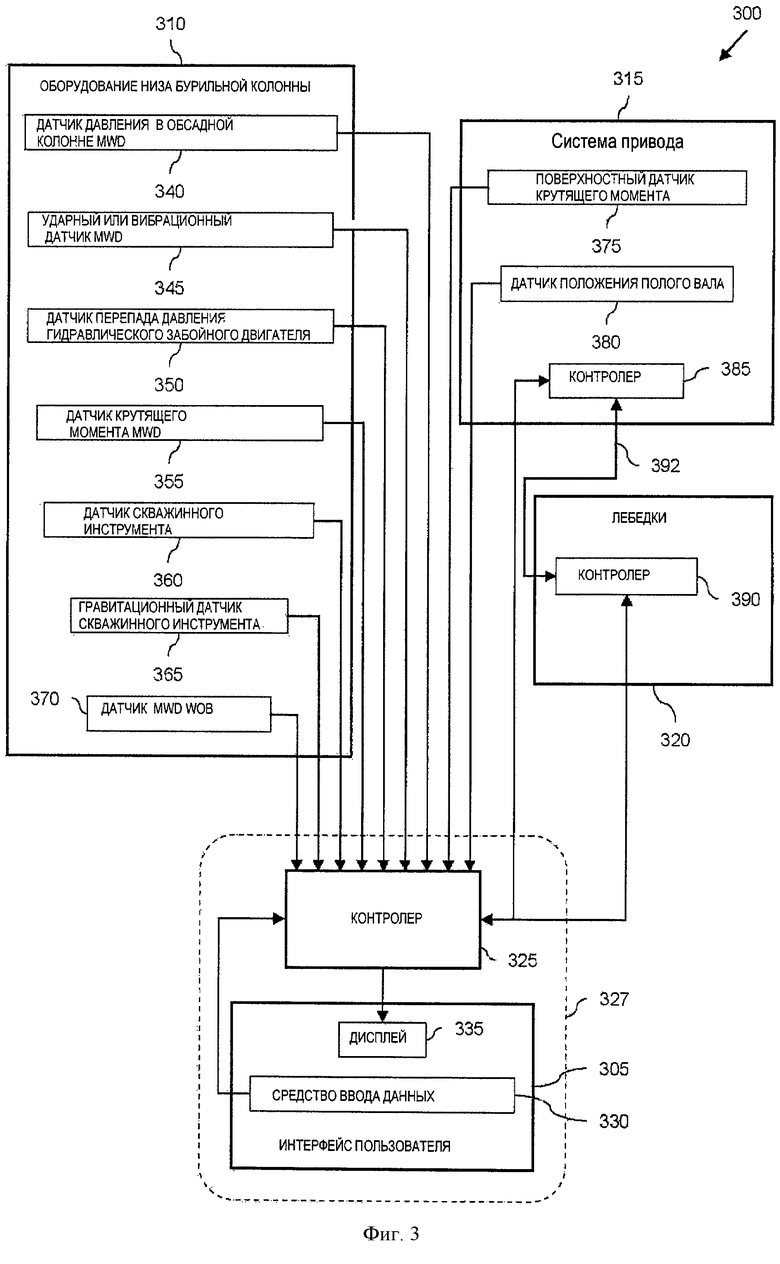
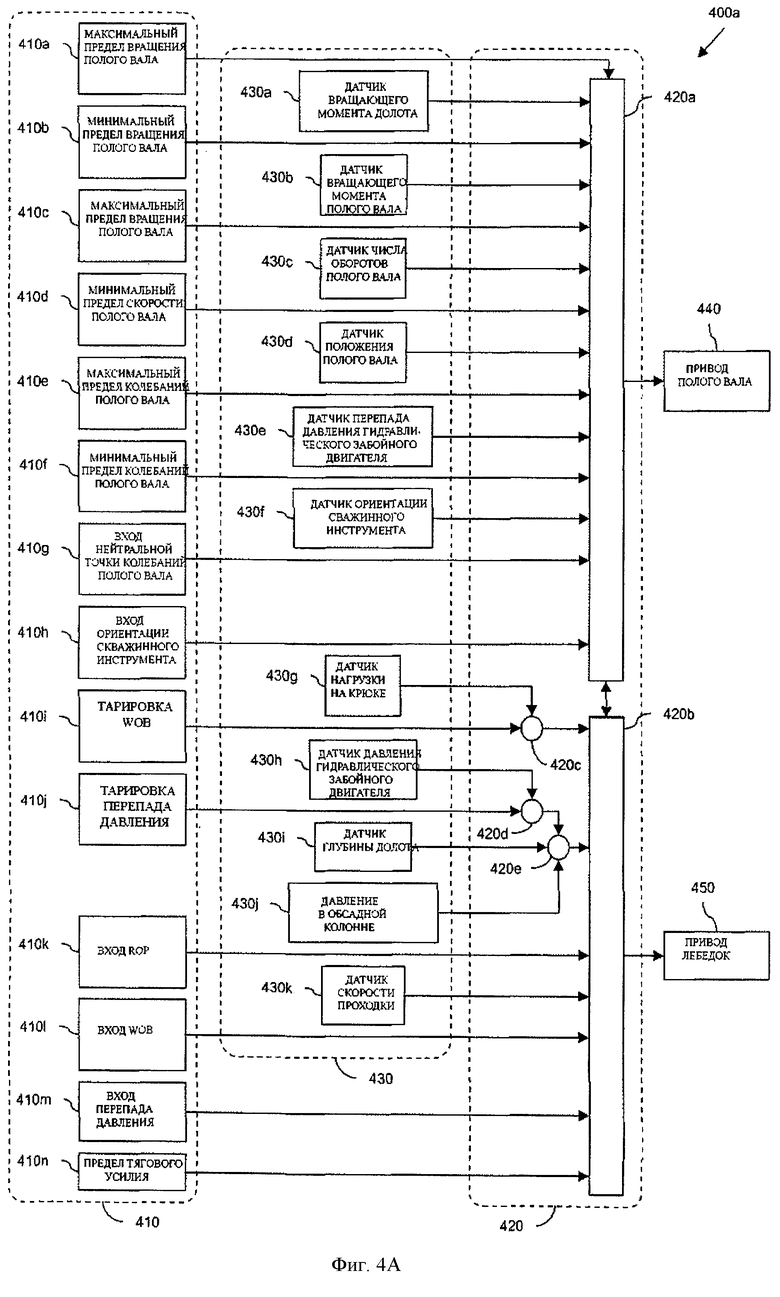
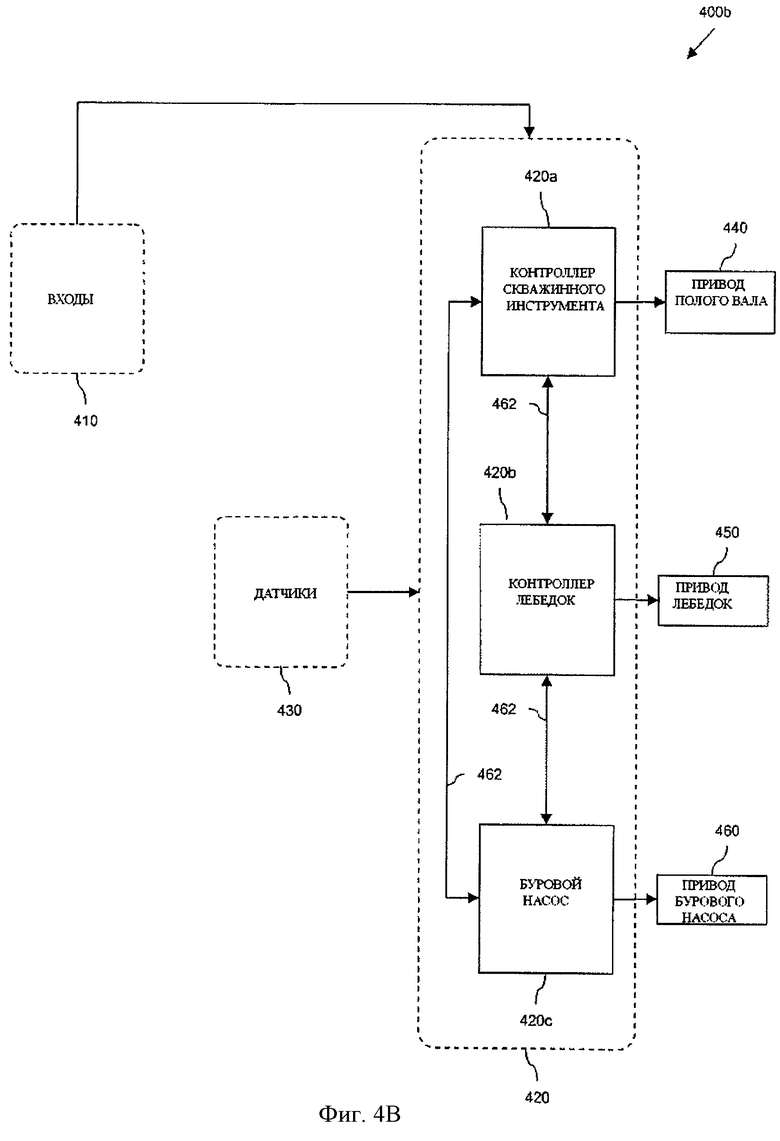
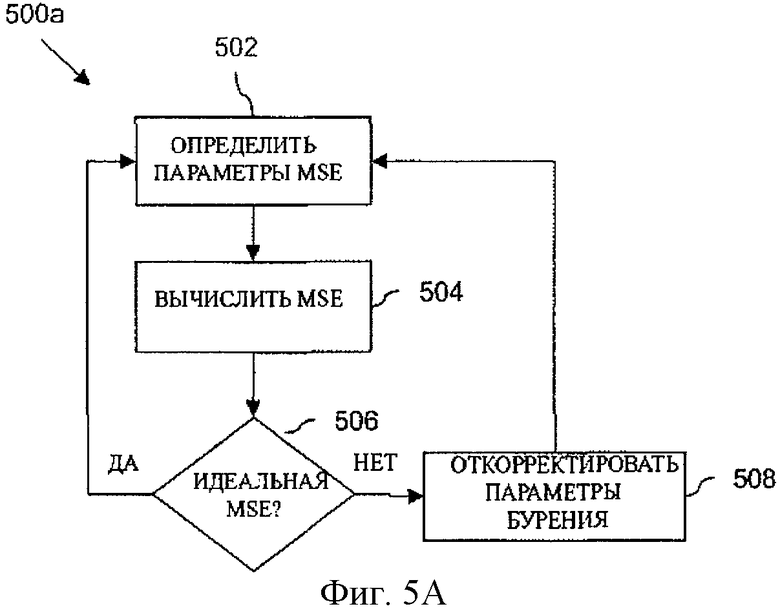
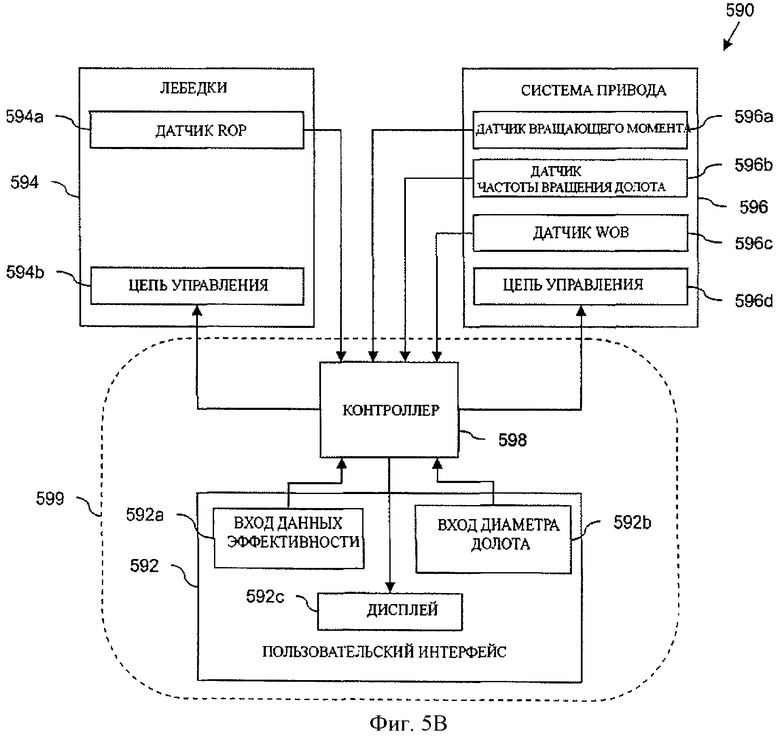
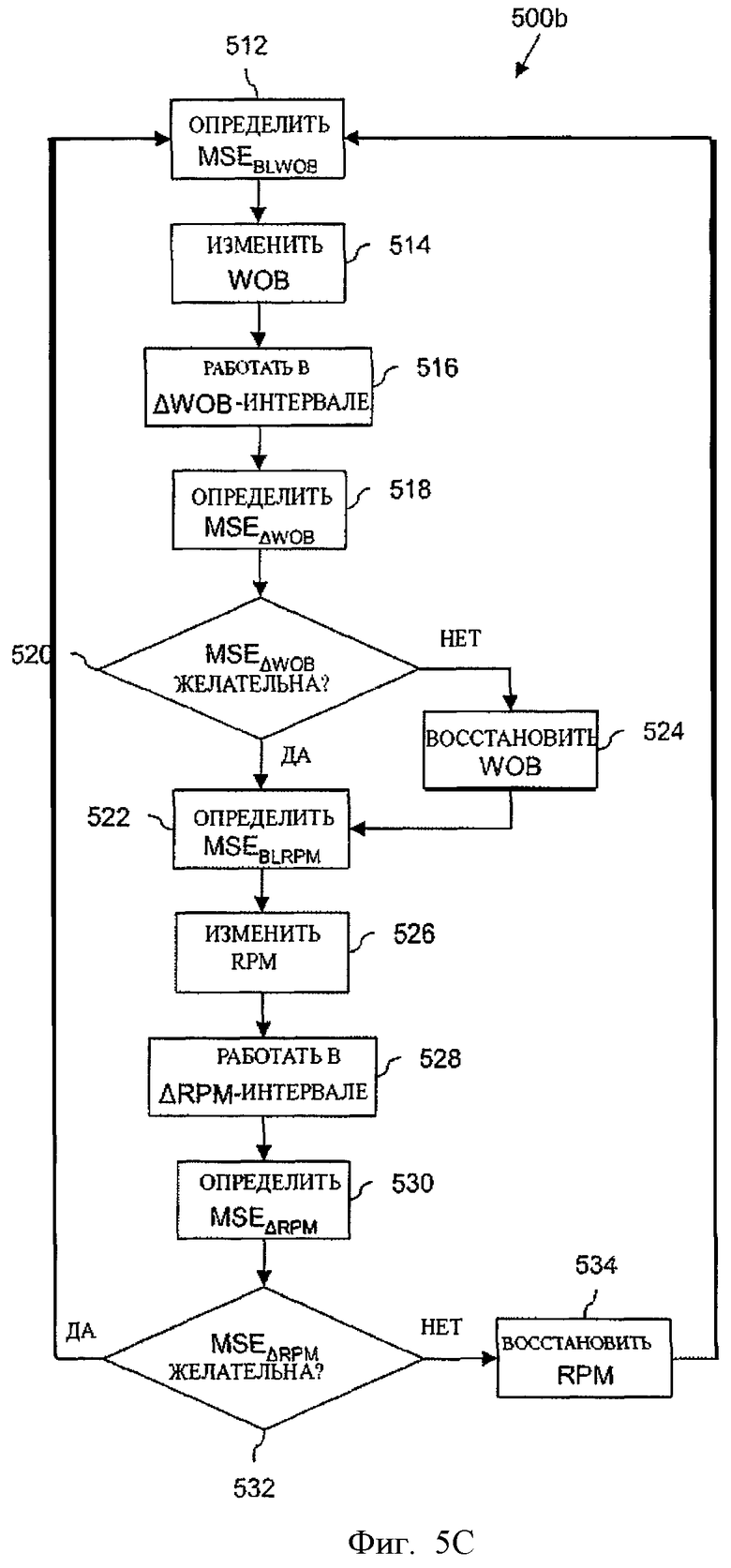
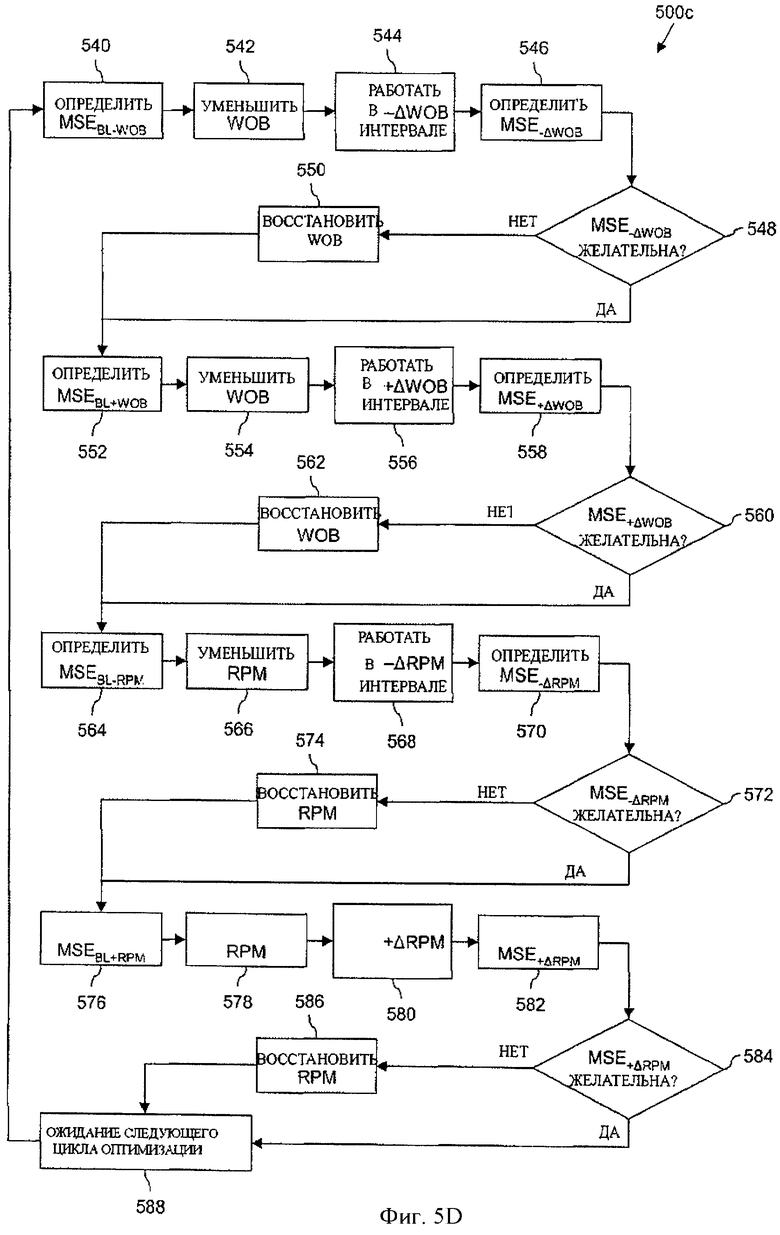
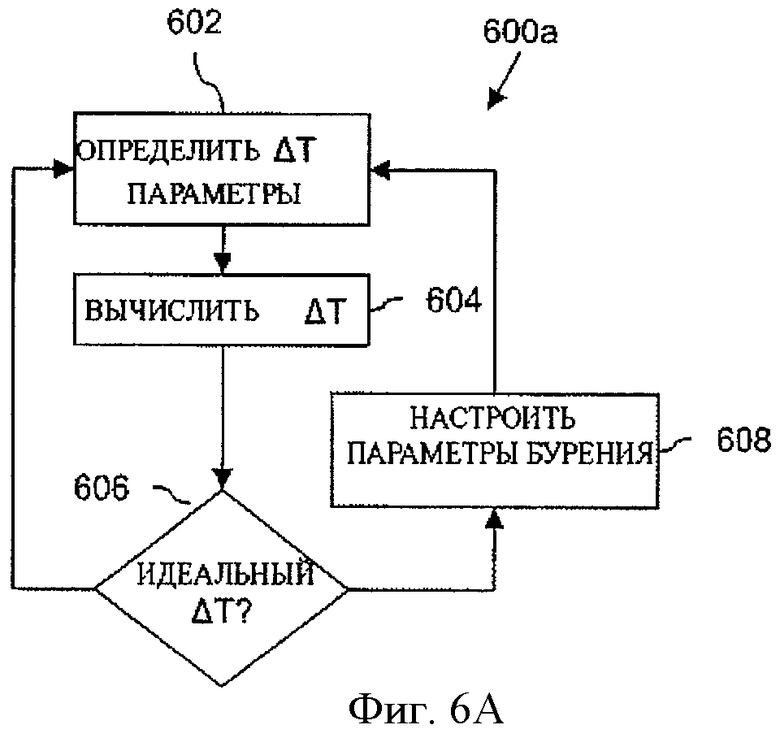
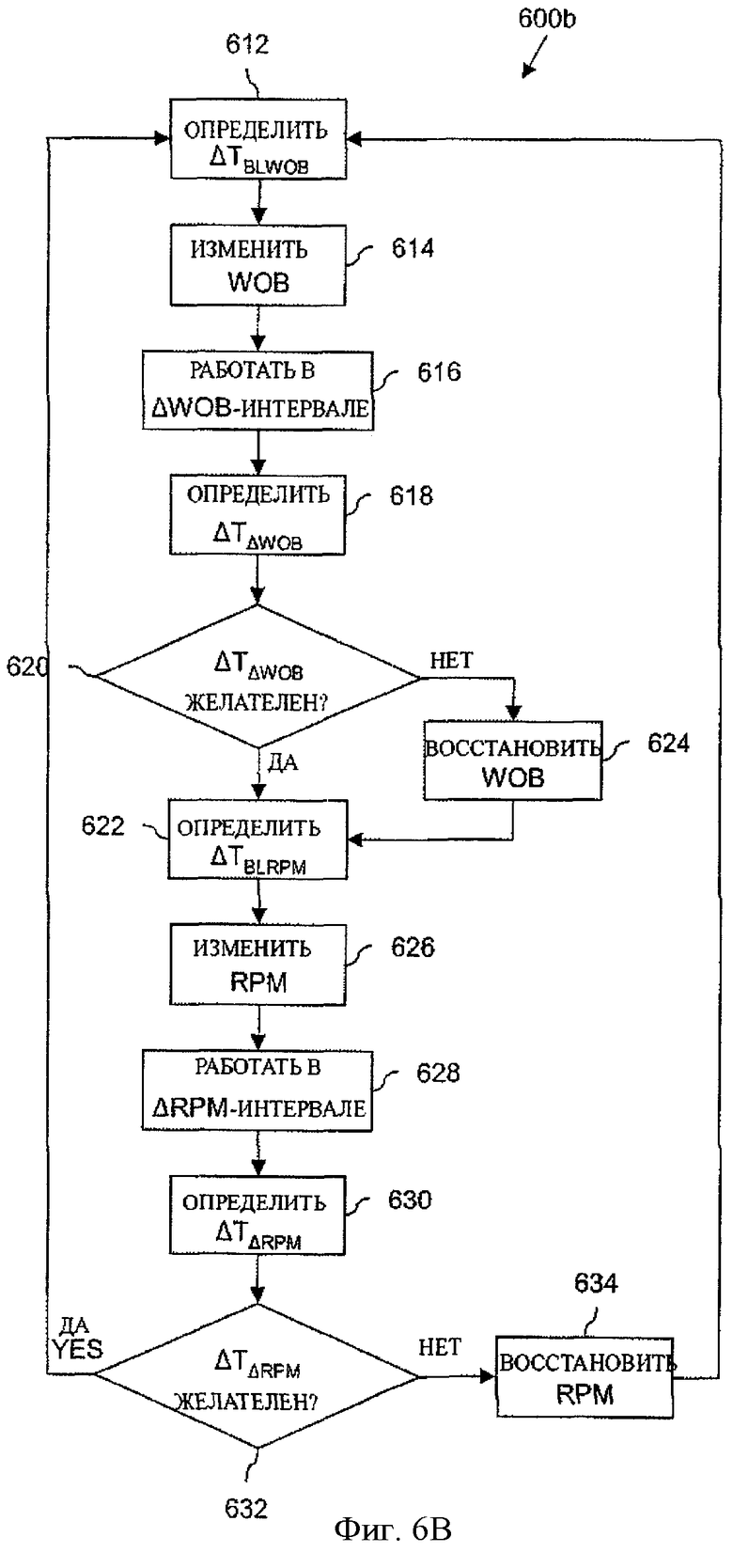
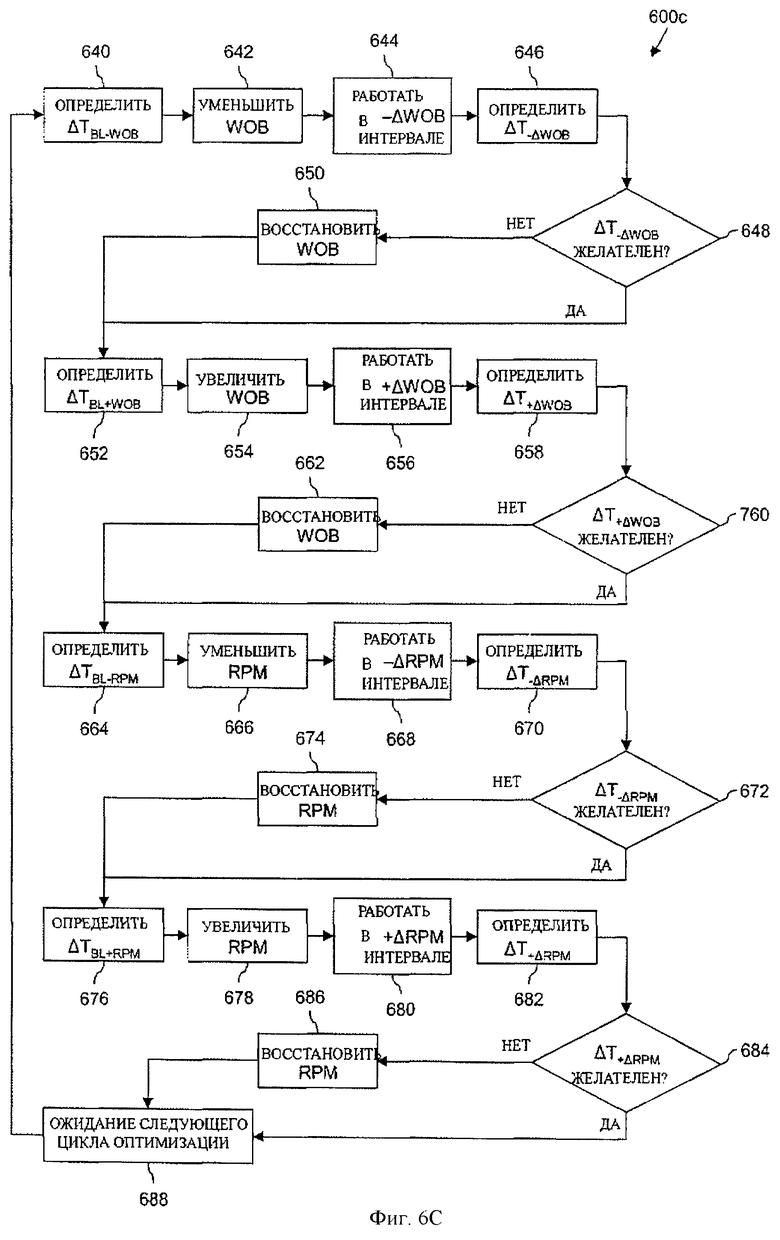
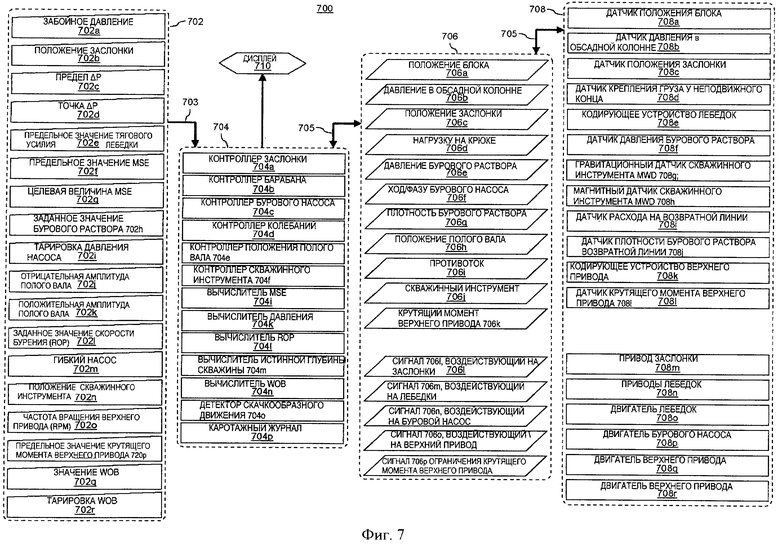

Изобретение относится к автоматизированным бурильным установкам. Техническим результатом является повышение точности определения рабочих характеристик установки для бурения. Способ бурения на основе механической удельной энергии (MSE) содержит бурение в первом интервале, используя первую нагрузку на долото (WOB), автоматическое определение первой MSE, соответствующей бурению, используя первую WOB, бурение во втором интервале, используя вторую WOB, которая отличается от первой WOB, автоматическое определение второй MSE, соответствующей бурению, используя вторую WOB, и бурение в третьем интервале, используя одну из первой WOB и второй WOB, выбранные автоматически на основе автоматизированного сравнения первой MSE и второй MSE. 3 н. и 10 з.п. ф-лы, 8 ил.
1. Способ бурения на основе механической удельной энергии (MSE), содержащий:
бурение в первом интервале, используя первую нагрузку на долото (WOB);
автоматическое определение первой MSE, соответствующей бурению, используя первую WOB;
бурение во втором интервале, используя вторую WOB, которая отличается от первой WOB;
автоматическое определение второй MSE, соответствующей бурению, используя вторую WOB; и
бурение в третьем интервале, используя одну из первой WOB и второй WOB, выбранные автоматически на основе автоматизированного сравнения первой MSE и второй MSE.
2. Способ по п.1, дополнительно содержащий:
бурение в четвертом интервале, используя частоту вращения в оборотах минуту (RD-RPM) первого привода вращения;
автоматическое определение третьей MSE, соответствующей бурению, используя первую RD-RPM;
бурение в пятом интервале, используя вторую RD-RPM, которая отличается от первой RD-RPM;
автоматическое определение четвертой MSE, соответствующей бурению, используя вторую RD-RPM; и
бурение в шестом интервале, используя одну из первой RD-RPM и второй RD-RPM, выбранной автоматически на основе автоматизированного сравнения третьей MSE и четвертой MSE.
3. Способ по п.1, в котором вторая WOB меньше первой WOB, и который дополнительно содержит:
бурение в четвертом интервале, используя автоматически выбранную одну из первой WOB и второй WOB;
автоматическое определение третьей MSE, соответствующей бурению в четвертом интервале, используя автоматически выбранную одну из первой WOB и второй WOB;
бурение в пятом интервале, используя третью WOB, которая больше первой WOB;
автоматическое определение четвертой MSE, соответствующей бурению в пятом интервале, используя третью WOB; и бурение в шестом интервале, используя третью WOB, и автоматический выбор одной из первой WOB и второй WOB на основе автоматизированного сравнения третьей MSE и четвертой MSE.
4. Способ по п.3, дополнительно содержащий:
бурение в седьмом интервале, используя первую частоту вращения в оборотах в минуту (RD-RPM) привода вращения;
автоматическое определение пятой MSE, соответствующей бурению, используя первую RD-RPM;
бурение в восьмом интервале, используя вторую RD-RPM, которая меньше первой RD-RPM;
автоматическое определение шестой MSE, соответствующей бурению, используя вторую RD-RPM;
бурение в девятом интервале, используя одну из первой RD-RPM и второй RD-RPM, выбранные автоматически на основе автоматизированного сравнения пятой MSE и шестой MSE;
бурение в десятом интервале, используя автоматически выбранную одну из первой RD-RPM и второй RD-RPM;
автоматическое определение седьмой MSE, соответствующей бурению в десятом интервале, используя автоматически выбранную одну из первой RD-RPM и второй RD-RPM;
бурение в одиннадцатом интервале, используя третью RD-RPM, которая больше первой RD-RPM;
автоматическое определение восьмой MSE, соответствующей бурению в одиннадцатом интервале, используя третью RD-RPM; и
бурение в двенадцатом интервале, используя одну из третьей RD-RPM и автоматически выбранную одну из первой RD-RPM и второй RD-RPM, выбранные автоматически на основе автоматизированного сравнения седьмой MSE и восьмой MSE.
5. Машиночитаемый носитель, содержащий:
машиночитаемую среду; и
команды, записанные на машиночитаемой среде для:
управления бурением в первом интервале, используя первую нагрузку на долото (WOB);
автоматического определения первой MSE, соответствующей бурению в первом интервале, используя первую WOB;
управления бурением во втором интервале, используя вторую WOB, которая отличается от первой WOB;
автоматического определения второй MSE, соответствующей бурению во втором интервале, используя вторую WOB;
автоматического сравнения первой MSE и второй MSE и автоматический выбор одной из первой WOB и второй WOB как функции автоматизированного сравнения первой MSE и второй MSE; и управления бурением в третьем интервале, используя автоматически выбранную одну из первой WOB и второй WOB.
6. Машиночитаемый носитель по п.5, в котором команды дополнительно содержит команды для:
управления бурением в четвертом интервале, используя частоту вращения в оборотах минуту (RD-RPM) первого привода вращения;
автоматического определения третьей MSE, соответствующей бурению, используя первую RD-RPM;
управления бурением в пятом интервале, используя вторую RD-RPM, которая отличается от первой RD-RPM;
автоматического определения четвертой MSE, соответствующей бурению, используя вторую RD-RPM;
автоматического сравнения третьей MSE и четвертой MSE и автоматический выбор одной из первой RD-RPM и второй RD-RPM как функции автоматизированного сравнения третьей MSE и четвертой MSE; и управления бурением в шестом интервале, используя автоматически выбранную одну из первой RD-RPM и второй RD-RPM.
7. Машиночитаемый носитель по п.5, в котором вторая WOB меньше первой WOB, и в котором команды дополнительно содержит команды для:
управления бурением в четвертом интервале, используя автоматически выбранную одну из первой WOB и второй WOB;
автоматического определения третьей MSE, соответствующей бурению в четвертом интервале, используя автоматически выбранную одну из первой WOB и второй WOB;
управления бурением в пятом интервале, используя третью WOB, которая больше первой WOB;
автоматического определения четвертой MSE, соответствующей бурению в пятом интервале, используя третью WOB;
автоматического сравнения третьей MSE и четвертой MSE и автоматический выбор одной из третьей WOB и одной из первой WOB и второй WOB как функции автоматизированного сравнения третьей MSE и четвертой MSE; и
управления бурением в шестом интервале, используя автоматически выбранную одну из третьей WOB и автоматически выбранную одну из первой WOB и второй WOB.
8. Машиночитаемый носитель по п.7, в котором команды дополнительно содержит команды для:
управления бурением в седьмом интервале, используя первую частоту вращения в оборотах в минуту (RD-RPM) привода вращения;
автоматического определения пятой MSE, соответствующей бурению, используя первую RD-RPM;
управления бурением в восьмом интервале, используя вторую RD-RPM, которая меньше первой RD-RPM;
автоматического определения шестой MSE, соответствующей бурению, используя вторую RD-RPM;
автоматического сравнения пятой MSE и шестой MSE и автоматический выбор одной из первой RD-RPM и второй RD-RPM как функции автоматизированного сравнения пятой MSE и шестой MSE;
управления бурением в девятом интервале, используя автоматически выбранную одну из первой RD-RPM и второй RD-RPM;
управления бурением в десятом интервале, используя автоматически выбранную одну из первой RD-RPM и второй RD-RPM;
автоматического определения седьмой MSE, соответствующей бурению в десятом интервале, используя автоматически выбранную одну из первой RD-RPM и второй RD-RPM;
управления бурением в одиннадцатом интервале, используя третью RD-RPM, которая больше первой RD-RPM;
автоматического определения восьмой MSE, соответствующей бурению в одиннадцатом интервале, используя третью RD-RPM;
автоматического сравнения седьмой MSE и восьмой MSE и автоматический выбор одной из третьей и автоматически выбранной одной первой RD-RPM и второй RD-RPM как функции автоматизированного сравнения седьмой MSE и восьмой MSE; и
управления бурением в двенадцатом интервале, используя автоматически выбранную третью RD-RPM и для автоматического выбора первой RD-RPM и второй RD-RPM.
9. Устройство для бурения, включающее:
верхний привод, используемый для вращения бурильной колонны в стволе скважины;
лебедки для вертикального перемещения верхнего привода, чтобы изменить осевое положение бурильной колонны в стволе скважины; и
контроллер, используемый для приема множество параметров MSE, затем для автоматического определения MSE и затем для автоматического формирования и передачи одного или нескольких управляющих сигналов на верхний привод и лебедки, чтобы управлять работой верхнего привода и лебедок, в котором контроллер используется для автоматического формирования управляющих сигналов, по меньшей мере, частично на основе автоматически определенной MSE.
10. Устройство по п.9, в котором контроллер предназначен для:
управления работой верхнего привода и лебедок во время бурения в первом интервале, используя первую нагрузку на долото (WOB);
автоматического определения первой MSE, соответствующей бурению в первом интервале, используя первую WOB;
управления работой верхнего привода и лебедок во время бурения во втором интервале, используя вторую WOB, которая отличается от первой WOB;
автоматического определения второй MSE, соответствующей бурению во втором интервале, используя вторую WOB; и управления работой верхнего привода и лебедок во время бурения в третьем интервале, используя одну из первой WOB и второй WOB, выбранные автоматически на основе автоматизированного сравнения первой MSB и второй MSE.
11. Устройство по п.10, в котором контроллер дополнительно предназначен для:
управления работой верхнего привода и лебедок во время бурения в четвертом интервале, используя первую частоту вращения в оборотах в минуту верхнего привода (TD-RPM);
автоматического определения третьей MSE, соответствующей бурению в четвертом интервале, используя первую TD-RPM;
управления работой верхнего привода и лебедок во время бурения в пятом интервале, используя вторую TD-RPM, которая отличается от первой TD-RPM;
автоматического определения четвертой MSE, соответствующей бурению в пятом интервале, используя вторую TD-RPM; и
управления работой верхнего привода и лебедок во время бурения в четвертом интервале, используя одну из первой TD-RPM и второй TD-RPM, выбранной автоматически на основе автоматизированного сравнения третьей MSE и четвертой MSE.
12. Устройство по п.10, в котором вторая WOB меньше первой WOB, и в котором контроллер дополнительно предназначен для:
управления работой верхнего привода и лебедок во время бурения в четвертом интервале, используя автоматически выбранную одну из первой WOB и второй WOB;
автоматического определения третьей MSE, соответствующей бурению в четвертом интервале, используя автоматически выбранную одну из первой WOB и второй WOB;
управления работой верхнего привода и лебедок во время бурения в пятом интервале, используя третью WOB, которая больше первой WOB;
автоматического определения четвертой MSE, соответствующей бурению в пятом интервале, используя третью WOB; и
управления работой верхнего привода и лебедок во время бурения в четвертом интервале, используя третью WOB, и для автоматического выбора одной из первой WOB и второй WOB, выбранной автоматически на основе автоматизированного сравнения третьей MSE и четвертой MSE.
13. Устройство по п.12, в котором контроллер дополнительно предназначен для:
управления работой верхнего привода и лебедок во время бурения в седьмом интервале, используя первую частоту вращения в оборотах в минуту верхнего привода (TD-RPM);
автоматического определения пятой MSE, соответствующей бурению в седьмом интервале, используя первую TD-RPM;
управления работой верхнего привода и лебедок во время бурения в восьмом интервале, используя вторую TD-RPM, которая меньше первой TD-RPM;
автоматического определения шестой MSE, соответствующей бурению в восьмом интервале, используя вторую TD-RPM;
управления работой верхнего привода и лебедок во время бурения в девятом интервале, используя одну из первой TD-RPM и второй TD-RPM, выбранной автоматически на основе автоматизированного сравнения пятой MSE и шестой MSE;
управления работой верхнего привода и лебедок во время бурения в десятом интервале, используя автоматически выбранную одну из первой TD-RPM и второй TD-RPM;
автоматического определения седьмой MSE, соответствующей бурению в десятом интервале, используя автоматически выбранную одну из первой TD-RPM и второй TD-RPM;
управления работой верхнего привода и лебедок во время бурения в одиннадцатом интервале, используя третью TD-RPM, которая больше первой TD-RPM;
автоматического определения восьмой MSB, соответствующей бурению в одиннадцатом интервале, используя третий TD-RPM; и
управления работой верхнего привода и лебедок во время бурения в двенадцатом интервале, используя одну из третьей TD-RPM и автоматически выбранную одну из первой TD-RPM и второй TD-RPM, выбранное на основе автоматизированного сравнения седьмой MSE и восьмой MSE.
Приоритет: от 07.12.2006, 21.09.2007, 06.11.2007 - все пункты формулы изобретения.
| US 7032689 В2, 25.04.2006 | |||
| Способ регулирования процесса вращательного бурения горных пород | 1983 |
|
SU1162953A1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРОЦЕССОМ БУРЕНИЯ | 2001 |
|
RU2208153C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ НАГРУЗКИ НА ДОЛОТО ПРИ БУРЕНИИ ГЛУБОКИХ СКВАЖИН | 2000 |
|
RU2232882C2 |
| US 7085696 B2, 01.08.2006. | |||

