Уровень техники
Системы верхнего привода предназначены для вращения обсадной или бурильной колонны в стволе скважины. Некоторые верхние приводы содержат шпиндель, который образует вертикальную промежуточную часть между верхним приводом и колонной труб, причем шпиндель обычно находится в резьбовом соединении с верхним концом обсадной или бурильной трубы для передачи крутящего момента и вращательного движения на бурильную колонну, а также может быть опосредовано связан с обсадной или бурильной трубой, например, посредством хомута.
Для уменьшения случаев возникновения сращивания и/или прерывистого движения применяют верхний привод, который обеспечивает создание колебаний или вращательное раскачивание бура во время бурения, тем самым снижая затяжку бурильной колонны в стволе скважины. Однако параметры, относящиеся к создаваемым верхним приводом колебаниям, как правило, запрограммированы в системе верхнего привода и не могут быть изменены оператором, поэтому не могут быть оптимальными для всех случаев бурения. Например, некоторые параметры колебаний, такие как скорость, ускорение и замедление, могут использоваться независимо от длины буровой колонны и независимо от залегающей геологической структуры. Однако параметры колебаний, используемые в одних условиях бурения, могут быть менее эффективными в других условиях бурения. Ввиду этого иногда оптимальные колебания могут и не достигаться, что приводит к относительно неэффективному бурению и потенциально меньшему продвижению долота.
Краткое описание чертежей
Лучше понять настоящее изобретение поможет приведенное далее подробное описание, а также прилагаемые чертежи. Необходимо отметить, что в соответствии с принятой в области техники практикой различные элементы выполнены не в масштабе. К тому же размеры различных элементов могут быть увеличены или уменьшены произвольным образом для упрощения понимания.
На Фиг. 1 схематически показано устройство в соответствии с одним или несколькими аспектами настоящего изобретения.
На Фиг. 2 схематически показано устройство в соответствии с одним или несколькими аспектами настоящего изобретения.
На Фиг. 3 показана схема в соответствии с одним или несколькими аспектами настоящего изобретения.
На Фиг. 4 показана схема в соответствии с одним или несколькими аспектами настоящего изобретения.
На Фиг. 5 показана схема в соответствии с одним или несколькими аспектами настоящего изобретения.
На Фиг. 6 показана блок-схема по меньшей мере части способа в соответствии с одним или несколькими аспектами настоящего изобретения.
На Фиг. 7 показана блок-схема по меньшей мере части способа в соответствии с одним или несколькими аспектами настоящего изобретения.
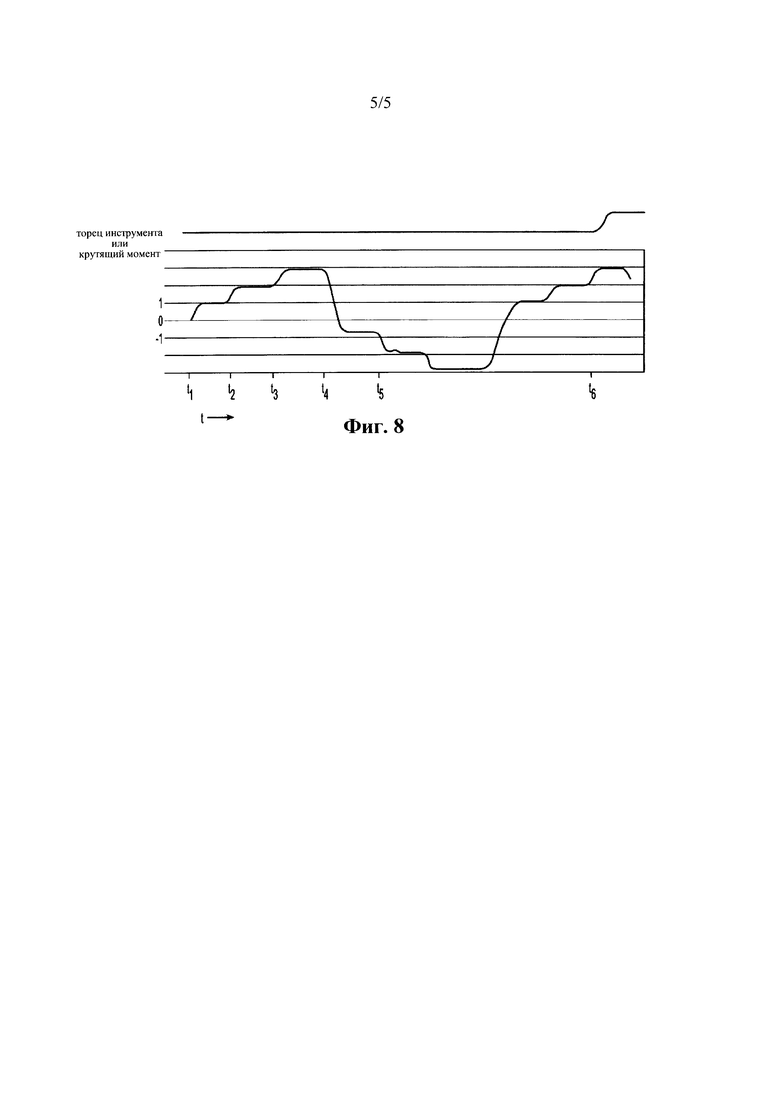
На Фиг. 8 показана схема в соответствии с одним или несколькими аспектами настоящего изобретения.
Осуществление изобретения
Следует сказать, что приведенное далее описание раскрывает несколько различных вариантов осуществления или примеров для выполнения различных признаков в соответствии с различными вариантами осуществления. Характерные примеры компонентов и компоновок описаны ниже и упрощают понимание настоящего изобретения. Они приведены, безусловно, только в качестве примеров и не являются ограничивающими. Более того, в настоящем раскрытии в различных примерах могут повторяться ссылочные позиции и/или буквенные обозначения. Такое повторение лишь упрощает понимание и ни в коем случае не устанавливает взаимосвязь между различными вариантами осуществления и/или конфигурациями, описанными в настоящем документе. Более того, описываемое расположение первого элемента над вторым элементом или непосредственно на нем может предусматривать варианты осуществления, в которых первый и второй элементы располагаются в непосредственном контакте, а также может предусматривать варианты осуществления, согласно которым дополнительные элементы могут быть расположены между первым и вторым элементами, так что первый и второй элементы могут и не находиться в непосредственном контакте.
В настоящем раскрытии описаны устройства, системы и способы улучшения управления направлением буровой компоновки, например компоновки нижней части бурильной колонны во время процесса бурения. Устройства, системы и способы предоставляют пользователю (также называемому в настоящем документе «оператором») возможность корректировать параметр колебаний для смены метода качания для создания колебаний колонны труб с целью повышения производительности процесса бурения. Под бурильной колонной или буровым снарядом также подразумевается любая колонна труб. Такое усовершенствование может достигаться, например, за счет увеличения скорости бурения, скорости проходки, срока службы компонентов и/или других усовершенствований. Согласно одному аспекту пользователь может корректировать параметры колебаний буровой компоновки за счет корректировки по меньшей мере одного из настроек угловых значений, настроек скорости и настроек ускорения и замедления, как правило, для оптимизации скорости проходки или другого необходимого параметра бурения с одновременным уменьшением или исключением вращения компоновки низа бурильной колонны.
Согласно одному аспекту настоящее изобретение относится к устройствам, системам и способам, которые позволяют оптимизировать параметры колебаний для более эффективного бурения. Наиболее эффективное бурение достигается при работе буровой системы при оптимизированных параметрах. Например, настройки угловых значений верхнего привода, который вращает только верхнюю половину бурильной колонны, будут менее эффективны для уменьшения затяжки, чем настройки угловых значений верхнего привода, который вращает всю бурильную колонну. Поэтому оптимальными настройками угловых значений могут считаться настройки, которые используются для вращения всей бурильной колонны. К тому же ввиду того, что слишком высокая частота вращения может приводить к вращению компоновки низа бурильной колонны и нежелательному изменению направления бурения, оптимальные настройки угловых значений не будут отрицательно влиять на метод бурения.
Согласно одному аспекту настоящее изобретение относится к устройствам, системам и способам бурения, которые предусматривают корректировку характеристики изменения ускорения для изменения эффективности бурения буровой системы. Для определения наиболее эффективной или оптимизированной формы или методики качания скорректированную характеристику изменения ускорения можно выбирать или регулировать. Устройство и способы в соответствии с настоящим изобретением могут быть использованы в системе направленного бурения любого типа, в которой используется метод качания, например в ручных вибрационных бурах, инструментах для спуска обсадной колонны, горизонтальном проходческом оборудовании, горно-шахтном оборудовании, нефтепромысловом оборудовании, например, содержащем верхний привод. Более подробно устройство описано в приведенном далее описании нефтепромыслового оборудования, однако устройство и способы управления направлением в соответствии с настоящим изобретением могут находить применение в широком диапазоне областей техники, включая области, описанные выше.
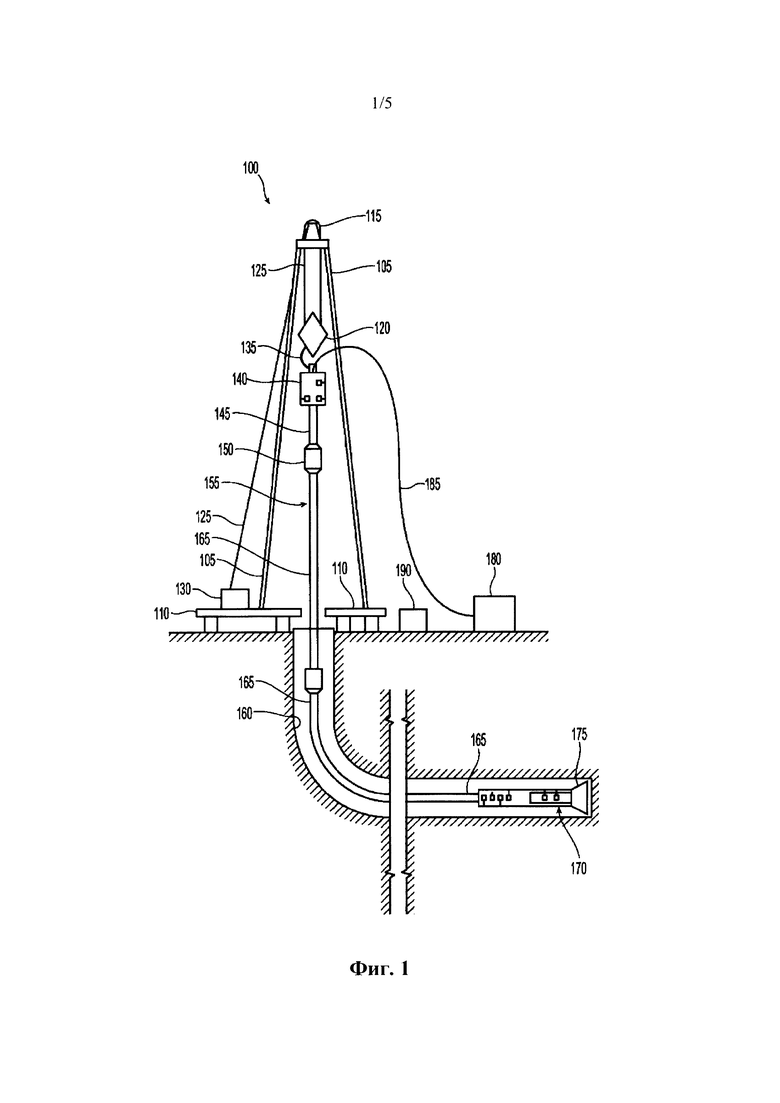
На Фиг. 1 представлен схематический вид устройства 100, в котором воплощен один или несколько аспектов настоящего изобретения. Устройство 100 представляет собой или входит в состав наземной буровой установки. Однако один или несколько аспектов настоящего изобретения могут быть воплощены или легко приспособлены к любому типу буровой установки, например, кроме прочего, к самоподъемным буровым установкам, полупогружным буровым платформам, буровым суднам, установкам с колоннами из гибких труб, установкам для подземного ремонта скважин, которые можно использовать для бурения и/или для операций по повторному вводу в скважину, а также к установкам обсадного бурения, которые подпадают под объем настоящего изобретения.
Устройство 100 содержит мачту 105, на которой закреплен подъемный механизм, расположенный над полом 110 буровой установки. Подъемный механизм содержит кронблок 115 и талевый блок 120. Кронблок 115 сопряжен с верхней частью мачты 105 или рядом с ней, а талевый блок 120 свисает с кронблока 115 на талевом канате 125. Один конец талевого каната 125 выходит из подъемного механизма и проходит к буровой лебедке 130, которая обеспечивает наматывание и разматывание талевого каната 125 для опускания и подъема талевого блока 120 относительно пола 110 буровой установки. Другой конец талевого каната 125, называемый неподвижным концом, неподвижно прикреплен, возможно, рядом с буровой лебедкой 130 или в другом месте рядом с установкой.
Крюк 135 прикреплен в нижней части талевого блока 120. Верхний привод 140 подвешен на крюке 135. Шпиндель 145, выходящий из верхнего привода 140, прикреплен к переводнику 150, прикрепленному к бурильной колонне 155, которая подвешена внутри ствола 160 скважины. Альтернативно шпиндель 145 может быть прикреплен непосредственно к бурильной колонне 155. Следует отметить, что в других традиционных методиках расположения установки не требуется талевый канат, и они подпадают под объем настоящего изобретения. Согласно другому аспекту (не показан) шпиндель отсутствует.
Бурильная колонна 155 содержит соединенные друг с другом секции бурильной трубы 165, компоновку 170 низа бурильной колонны (ВНА) и буровое долото 175. Компоновка 170 низа бурильной колонны может содержать, кроме прочих компонентов, стабилизаторы, утяжеленные бурильные трубы и/или инструменты для забойной телеметрии (MWD) или спускаемые на кабеле инструменты. Буровое долото 175, которое также в настоящем документе может называться инструментом, соединено с низом ВНА 170 или другим образом прикреплено к бурильной колонне 155. Один или несколько насосов 180 могут подавать промывочную жидкость в бурильную колонну 155 по гибкому шлангу или другому трубопроводу 185, который может быть гидравлически и/или физически соединен с верхним приводом 140.
Согласно приведенному в качестве примера варианту осуществления, показанному на Фиг. 1, верхний привод 140 обеспечивает вращательное движение бурильной колонны 155. Однако аспекты настоящего изобретения также могут быть воплощены или могут быть легко приспособлены к оборудованию, в котором используются другие приводные системы, например, кроме прочего, силовой вертлюг, стол ротора, установка с гибкими непрерывными трубами, забойный двигатель и/или традиционная роторная установка.
Устройство 100 также содержит систему 190 управления, предназначенную для управления или содействия управлению одним или несколькими компонентами устройства 100. Например, система 190 управления может быть выполнена с возможностью передачи рабочих сигналов управления на буровую лебедку 130, верхний привод 140, ВНА 170 и/или насос 180. Система 190 управления может представлять собой независимый компонент, установленный рядом с мачтой 105 и/или другими компонентами устройства 100. Согласно некоторым вариантам осуществления система 190 управления физически расположена в отдельном месте и отдельно от буровой установки.
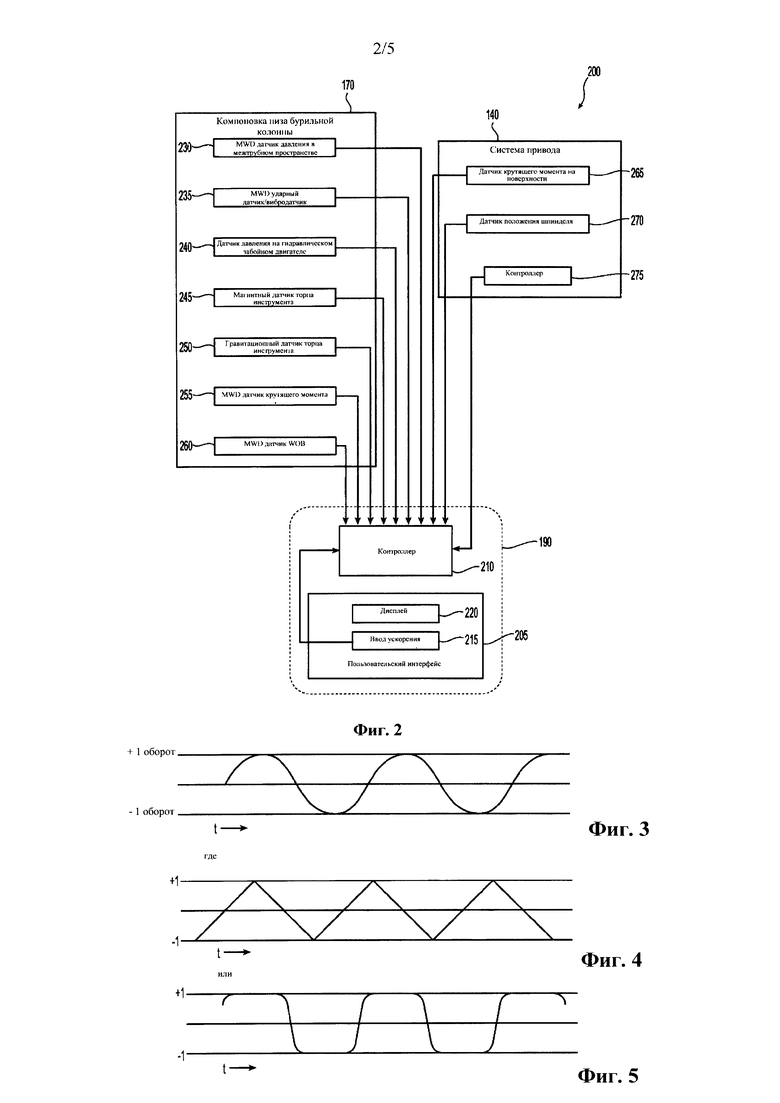
На Фиг. 2 показана схема части устройства 200 в соответствии с одним или несколькими аспектами настоящего изобретения. На Фиг. 2 показана система 190 управления, ВНА 170 и верхний привод 140. Устройство 200 может быть выполнено в среде и/или устройстве, показанном на Фиг. 1.
Система 190 управления содержит пользовательский интерфейс 205 и контроллер 210. В зависимости от варианта осуществления эти компоненты могут быть дискретными компонентами, которые соединены друг с другом проводным или беспроводным способом. Альтернативно пользовательский интерфейс 205 и контроллер 210 могут быть встроены в одну систему.
Пользовательский интерфейс 205 содержит механизм 215 ввода для ввода пользователем одной или нескольких настроек или параметров бурения, таких как ускорение, заданные координаты торца инструмента, настройки вращения и другие заданные значения или входные данные. Механизм 215 ввода может представлять собой клавиатуру, устройство распознавания голоса, циферблат, кнопку, переключатель, ползунковый селектор, реле, джойстик, мышь, базу данных и/или другое традиционное или разработанное в будущем устройство ввода данных. Такой механизм 215 ввода может поддерживать ввод данных из локальных и/или удаленных точек. Альтернативно или дополнительно механизм 215 ввода может предусматривать выбор пользователем заданных характеристик изменения, алгоритмов, заданных значений или диапазонов величин, например, посредством одного или нескольких раскрывающихся меню. Также данные могут быть альтернативно выбраны с помощью контроллера 210 в ходе выполнения одной или нескольких процедур поиска в базе данных. В целом механизм 215 ввода и/или другие компоненты, подпадающие под объем настоящего изобретения, поддерживают управление и/или контроль со станций, находящихся на буровой площадке, а также из одного или нескольких удаленных мест посредством линии связи с системой, сетью, локальной компьютерной сетью (LAN), глобальной сетью (WAN), Интернетом, спутниковой линией связи и/или радиоканалом.
Пользовательский интерфейс 205 также может содержать дисплей 220 для зрительного представления информации пользователю в текстовой, графической или видеоформе. Дисплей 220 также может использоваться пользователем совместно с механизмом 215 ввода для ввода параметров бурения, предельных значений или данных по заданным значениям. Например, механизм 215 ввода может представлять собой одно целое с дисплеем 220 или может быть соединен с ним каким-либо другим способом.
Согласно одному примеру контроллер 210 может содержать множество предварительно сохраненных выбираемых характеристик изменения ускорения, которые пользователь может просмотреть и выбрать для работы верхнего привода 140. Характеристики изменения ускорения могут включать параметры колебаний для управления верхнего привода 140 таким образом, чтобы он работал с заданными скоростями изменения ускорения и замедления, а также настройками скорости вращения в предельных положениях вращения. Выбираемые характеристики изменения, а следовательно, и параметры вращения верхнего привода 140 могут отличаться друг от друга. Выбирая конкретную характеристику изменения ускорения, пользователь может менять эффективность всего процесса бурения. Некоторые характеристики изменения ускорения для конкретного сценария бурения могут быть более эффективными по сравнению с другими. Например, если бурильная колонна имеет относительно большую длину, первая характеристика изменения ускорения может обеспечивать конкретную скорость бурения, например высокую скорость бурения. Однако если бурильная колонна имеет относительно небольшую длину, та же конкретная характеристика изменения ускорения может обеспечивать относительно невысокую скорость бурения, а вторая, отличная, характеристика изменения ускорения может обеспечивать относительно высокую скорость бурения. Аналогично, если бурение осуществляют сквозь конкретную геологическую формацию, работа верхнего привода с первой характеристикой изменения ускорения может обеспечивать более эффективное бурение по сравнению с работой верхнего привода со второй характеристикой изменения ускорения, при этом вторая характеристика изменения ускорения может обеспечивать более эффективное бурение, чем первая характеристика в другой геологической формации. Такие характеристики изменения ускорения могут характеризоваться параметрами колебаний, которые могут быть адаптированы под пользователя, использующего пользовательский интерфейс 205, для получения оптимальных параметров. Например, настройки скорости вращения могут быть по существу фиксированными, тогда как настройки скорости вращения верхнего привода можно отрегулировать, за счет чего пользователь может частично адаптировать под себя характеристику изменения ускорения за счет регулирования настроек вращения.
ВНА 170 может содержать один или несколько датчиков, как правило множество датчиков, расположенных вокруг ВНА и выполненных с возможностью определения параметров, связанных с условиями бурения, состоянием и положением ВНА, а также другой информации. Согласно варианту осуществления, показанному на Фиг. 3, ВНА 170 содержит MWD датчик 230 давления в межтрубном пространстве, который предназначен для определения значения или диапазона давления в затрубном пространстве на участке MWD в ВНА 170 или рядом с ним. Данные о давлении в межтрубном пространстве, определенные с помощью MWD датчика 230 давления в межтрубном пространстве, могут быть отправлены в форме электронного сигнала на контроллер 210 посредством проводной или беспроводной передачи.
Также ВНА 170 может содержать MWD ударный датчик/вибродатчик 235, который предназначен для определения ударов и/или вибрации на участке MWD в ВНА 170. Данные об ударах/вибрации, определенные с помощью MWD ударного датчика/вибродатчика 235, могут быть отправлены в форме электронного сигнала на контроллер 210 посредством проводной или беспроводной передачи.
Также ВНА 170 может содержать датчик 240 ΔР гидравлического забойного двигателя, который предназначен для определения значения или диапазона перепада давлений на гидравлическом забойном двигателе в ВНА 170. Данные о перепаде давлений, определенные с помощью датчика 240 ΔР гидравлического забойного двигателя, могут быть отправлены в форме электронного сигнала на контроллер 210 посредством проводной или беспроводной передачи. Альтернативно или дополнительно ΔР гидравлического забойного двигателя может быть рассчитан, определен или установлен другим способом на поверхности, например посредством расчета перепада между давлением в напорной линии у поверхности сразу над забоем и давлением в момент, когда долото касается забоя и начинает бурить и на него начинает действовать крутящий момент.
Также ВНА 170 может содержать магнитный датчик 245 торца инструмента и гравитационный датчик 250 торца инструмента, которые совместно позволяют определять текущее положение торца инструмента. Магнитный датчик 245 торца инструмента может представлять собой или содержать традиционный или разработанный в будущем магнитный датчик торца инструмента, который определяет положение торца инструмента относительно магнитного севера или географического севера. Гравитационный датчик 250 торца инструмента может представлять собой или содержать традиционный или разработанный в будущем гравитационный датчик торца инструмента, который позволяет определять положение торца инструмента относительно гравитационного поля Земли. В соответствии с приведенным в качестве примера вариантом осуществления магнитный датчик 245 торца инструмента способен определять текущее положение торца инструмента, когда конец ствола скважины отклонен от вертикали менее чем на 7°, а гравитационный датчик 250 торца инструмента способен определять текущее положение торца инструмента, когда конец ствола скважины отклонен от вертикали больше чем на 7°. Однако могут быть использованы и другие датчики торца инструмента, при этом не выходя за пределы объема настоящего изобретения, которые могут быть более или менее точными или могут характеризоваться той же степенью точности, в том числе это может быть немагнитный датчик торца инструмента и негравитационный датчик угла наклона. В любом случае положение торца инструмента, определенное с помощью одного или нескольких датчиков торца инструмента (например, датчиков 245 и/или 250), может быть отправлено в форме электронного сигнала на контроллер 210 посредством проводной или беспроводной передачи.
Также ВНА 170 может содержать MWD датчик 255 крутящего момента, который предназначен для определения величины или диапазона величин крутящего момента, приложенного к долоту одним или несколькими двигателями ВНА 170. Данные о крутящем моменте, определенные с помощью MWD датчика 255 крутящего момента, могут быть отправлены в форме электронного сигнала на контроллер 210 посредством проводной или беспроводной передачи.
Также ВНА 170 может содержать MWD датчик 260 осевой нагрузки на долото (WOB), который предназначен для определения величины или диапазона величин WOB на ВНА 170 или рядом с ней. Данные о WOB, определенные с помощью MWD датчика 260 WOB, могут быть отправлены в форме электронного сигнала на контроллер 210 посредством проводной или беспроводной передачи.
Верхний привод 140 содержит датчик 265 крутящего момента на поверхности, который предназначен для определения величины или диапазона величин реакционного вращения шпинделя 145 или бурильной колонны 155. Верхний привод 140 также содержит датчик 270 положения шпинделя, который предназначен для определения величины или диапазона величин углового положения шпинделя, например, относительно географического севера или другой неподвижной точки отсчета. Данные о кручении на поверхности и положении шпинделя, определенные с помощью датчиков 265 и 270 соответственно, могут быть отправлены в форме электронного сигнала на контроллер 210 посредством проводной или беспроводной передачи. На Фиг. 2 верхний привод 140 также содержит контроллер 275 и/или другое средство управления угловым положением, скоростью или направлением шпинделя 145 или другого компонента бурильной колонны, соединенного с верхним приводом 140 (например, шпиндель 145, показанный на Фиг. 1). В зависимости от варианта осуществления контроллер 275 может представлять собой одно целое с контроллером 210 или образовывать его часть.
Контроллер 210 выполнен с возможностью получения определенной информации (т.е. измеренной или рассчитанной) от пользовательского интерфейса 205, ВНА 170 и/или верхнего привода 140, и с возможностью использования такой информации для непрерывной, периодической или другой работы для определения рабочего параметра, обеспечивающего повышенную эффективность. Контроллер 210 может быть дополнительно выполнен с возможностью генерирования сигнала управления, например посредством интеллектуального адаптивного управления, и подачи сигнала управления на верхний привод 140 для регулирования и/или сохранения положения ВНА.
Более того, согласно приведенному в качестве примера варианту осуществления, показанному на Фиг. 2, контроллер 275 верхнего привода 140 может быть выполнен с возможностью генерирования и передачи сигнала на контроллер 210. Следовательно, контроллер 275 верхнего привода 170 может быть выполнен с возможностью воздействия на процесс управления ВНА 170, способствуя таким образом получению и/или сохранению требуемой характеристики изменения ускорения. Следовательно, контроллер 275 верхнего привода 140 может принимать участие в получении и/или сохранении требуемого положения торца инструмента. Такое взаимодействие может быть независимым от управления, обеспечиваемого контроллером 210 и/или ВНА 170 или подаваемого на него. Согласно одному примеру контроллер 275 может содержать множество предварительно сохраненных выбираемых характеристик изменения ускорения, как было описано выше со ссылкой на контроллер 210.
На Фиг. 3-5 показаны графики примеров характеристик изменения ускорения, которые могут быть сохранены в одном или обоих контроллерах 210, 275.
На Фиг. 3, например, показана первая возможная характеристика изменения ускорения в форме относительно синусоидального сигнала. Характеристика изменения ускорения представляет положение верхнего привода 140 во время его возвратно-поступательного раскачивания для раскачивания и сообщения колебаний бурильной колонне. Также она представляет положение вращающегося верхнего привода с течением времени. Верхний привод вращается в первом направлении до тех пор, пока не будет достигнуто рабочее вращательное значение, и в этой точке верхний привод 140 начинает вращаться в противоположном направлении. В пояснительных целях в показанном примере характеристики изменения ускорения настройки вращения предусматривают один поворот в каждом направлении от нейтрального положения, показанном как положительный поворот и отрицательный поворот, выполняемый с течением времени. На Фиг. 3 верхний привод 140 соответствует характеристике изменения ускорения, показанной с плавным увеличением скорости вращения, после которого следует плавное снижение скорости вращения до того момента, когда верхний привод остановится и начнет вращаться в противоположном направлении. Согласно одному примеру характеристика изменения ускорения на Фиг. 4 представляет собой стандартную форму сигнала или характеристику изменения по умолчанию, заданную контроллером 210 или контроллером 275, показанным на Фиг. 3.
На Фиг. 4 показана альтернативная выбираемая характеристика изменения ускорения, которая может обеспечивать более интенсивный метод качания и может приводить в результате к более интенсивному резанию. Согласно этой характеристике изменения ускорения верхний привод 140 может вращаться в одном направлении с постоянной скоростью до достижения предельного положения вращения, а затем верхний привод может резко вращаться в противоположном направлении по существу с постоянной скоростью. Соответственно, на Фиг. 4 показана треугольная форма сигнала.
На Фиг. 5 показана другая альтернативная выбираемая характеристика изменения ускорения, которая может обеспечивать более интенсивную характеристику изменения ускорения качания. На Фиг. 5 скорость вращения является относительно высокой, на что указывают по существу вертикальные линии кривой ускорения. Верхний привод 140 может мгновенно останавливаться в каждом предельном положении вращения перед быстрым ускорением до относительно высокой скорости вращения в пределах безопасных предельных рабочих положений верхнего привода (или для уменьшения чрезмерного износа верхнего привода) до тех пор, пока верхний привод практически не достигнет противоположного предельного положения вращения, где в этой точке он начинает быстро замедляться для непродолжительной остановки в предельном положении вращения. Соответственно, на Фиг. 5 показана ступенчатая форма сигнала.
В зависимости от геологической формации, состояния режущего долота, длины бурильной колонны и других факторов окружающей среды один тип характеристики изменения ускорения может обеспечивать более эффективное бурение, чем другие характеристики изменения ускорения. Способ, показанный на Фиг. 6, представляет собой наглядный пример способа идентификации одной или нескольких эффективных характеристик изменения ускорения для оптимизации процесса бурения, например скорость проходки, снижение или исключение прерывистого движения во время бурения или подобное, или их комбинации.
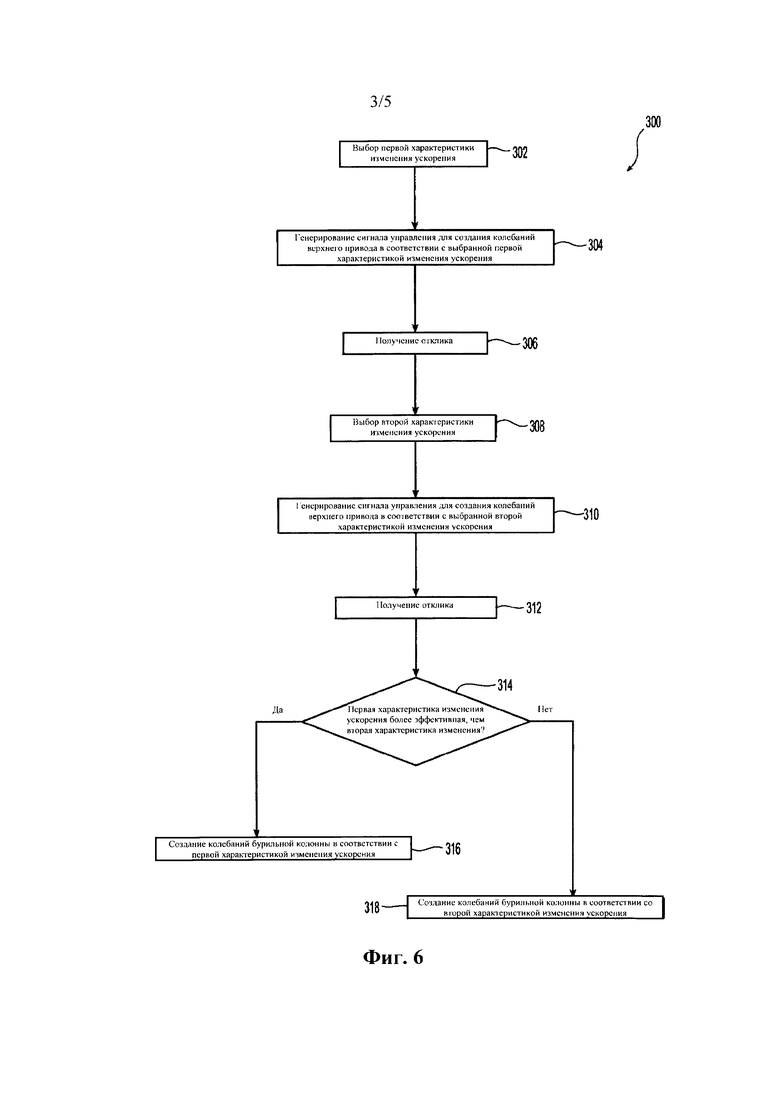
На Фиг. 6 показана блок-схема примера способа 300 повышения эффективности бурения посредством корректировки параметров колебаний элементов буровой системы 100. Согласно примеру, показанному на Фиг. 3, параметры колебаний определены в выбираемой характеристике изменения ускорения и могут влиять на эффективность бурения, например на скорость бурения, или скорость проходки, или другой количественный параметр эффективности. Способ начинается на стадии 302, на которой пользователь выбирает первую характеристику изменения ускорения. Характеристика изменения ускорения может быть любой из приведенных в качестве примера характеристик изменения ускорения, описанных выше со ссылкой на Фиг. 3-5, или же может представлять другие характеристики изменения.
В соответствии с одним вариантом осуществления пользователь может выбрать первую характеристику изменения ускорения, используя механизм 215 ввода пользовательского интерфейса 205, показанный на Фиг. 2. Механизм 215 ввода может обеспечивать передачу выбранной характеристики изменения ускорения на контроллер 210, который осуществляет управление верхним приводом 140 для создания колебаний шпинделя и бурильной колонны на основании выбора. Контроллер 210 может обеспечивать передачу команд в зависимости от выбранной характеристики изменения ускорения на контроллер 275 верхнего привода 140. Такая характеристика изменения ускорения может быть выбрана из списка доступных выбираемых характеристик изменения ускорения, сохраненных в контроллере 210, как было указано выше, или может быть введена пользователем, или может быть выполнена комбинация таких действий. В соответствии с одним вариантом осуществления эти характеристики изменения предоставляются пользователю на выбор. В соответствии с другим примером система 190 управления автоматически выбирает вторую характеристику изменения ускорения. В соответствии с этим вариантом осуществления система управления может пропустить две или более характеристики изменения ускорения и выбрать следующую в списке.
В соответствии с некоторыми вариантами осуществления контроллер 210 может иметь исходную характеристику изменения ускорения по умолчанию, например сигнал стандартной формы, показанный на Фиг. 3. В соответствии с таким вариантом осуществления контроллер 210 может самостоятельно выбрать первую характеристику изменения ускорения. В соответствии с другими вариантами осуществления контроллер выбирает характеристику изменения, если контроллер 210 был включен изначально. В соответствии с другими вариантами осуществления для выбора характеристики изменения ускорения необходимо непосредственное воздействие пользователя посредством механизма 215 ввода на пользовательский интерфейс 205.
В соответствии с некоторыми вариантами осуществления первая характеристика изменения ускорения может быть рассчитана или сгенерирована контроллером 210 на основании текущих рабочих параметров буровой системы. Например, контроллер 210 может рассматривать одно или оба из длины и диаметра бурильной колонны для расчета начальной характеристики изменения ускорения, которая может быть максимально похожа на характеристику, подходящую для конкретных параметров бурильной колонны.
На стадии 304 контроллер 210 генерирует а сигнал управления для создания колебаний верхнего привода 140 в соответствии с выбранной характеристикой изменения ускорения. Например, если была выбрана приведенная в качестве примера характеристика изменения ускорения согласно Фиг. 3, контроллер 210 будет генерировать сигнал управления, который отвечает за работу верхнего привода в соответствии с параметрами колебаний, воплощенными в характеристике изменения ускорения согласно Фиг. 3.
На стадии 306 контроллер 210 получает отклик касательно эффективности процесса бурения, выполняемого при выбранной первой характеристике изменения ускорения. В соответствии с одним вариантом осуществления контроллер 210 получает отклик от датчика 265 крутящего момента на поверхности, принадлежащего системе 140 верхнего привода. В соответствии с другим примером контроллер 210 получает отклик от ВНА 170, например от одного из MWD датчика 230 давления в межтрубном пространстве, MWD ударного датчика/вибродатчика 235, датчика 240 давления на гидравлическом забойном двигателе, магнитного датчика 245 торца инструмента, гравитационного датчика 250 торца инструмента, MWD датчика 255 крутящего момента или MWD датчика 260 WOB. Используя этот отклик, наряду с другим откликом, согласно некоторым примерам, контроллер 210 может выполнять определение эффективности процесса бурения в соответствии с первой характеристикой изменения ускорения. Например, используя отклик, контроллер 210 может определять скорость бурения, скорость проходки, нагрузку, действующую на бурильные компоненты, которая может влиять на срок службы компонента, или другие параметры бурения, которые могут свидетельствовать об относительной эффективности процесса бурения.
На стадии 308 пользователь или система 190 управления выбирает вторую характеристику изменения ускорения, которая отличается от первой характеристики изменения ускорения, выбранной на стадии 302. Второй характеристикой изменения ускорения может быть любая из приведенных в качестве примера характеристик изменения, показанных на Фиг. 3-5, или она может представлять собой отличную характеристику изменения ускорения. В соответствии с одним вариантом осуществления такой выбор представляет собой входные данные для системы управления, вводимые с помощью механизма 215 ввода пользовательского интерфейса 205. Такая характеристика изменения ускорения может быть выбрана из списка доступных выбираемых характеристик изменения ускорения, сохраненных в контроллере 210 или контроллере 275. В соответствии с одним вариантом осуществления эти характеристики изменения предоставляются пользователю на выбор. В соответствии с другим примером система 190 управления автоматически выбирает вторую характеристику изменения ускорения. В соответствии с этим вариантом осуществления система 190 управления может пропустить две или более характеристики изменения ускорения и выбрать следующую в списке. В соответствии с другим примером вторая характеристика изменения ускорения представляет собой откорректированную версию первой характеристики изменения ускорения. Например, для регулирования одного или нескольких характерных элементов первой характеристики изменения ускорения, таких, например, как скорости изменения ускорения или замедления, настройка угловых значений или скорости вращения, пользователь может использовать механизм 215 ввода. В соответствии с другим примером оператор может корректировать форму сигнала. Соответственно, в таких случаях пользователь может создавать вторую требуемую характеристику изменения ускорения на основании своего опыта и знаний о системах бурения.
На стадии 310 контроллер 210 или 275 генерирует сигнал управления для создания колебаний верхнего привода 140 в соответствии со второй характеристикой изменения ускорения, выбранной на стадии 308. На стадии 312 контроллер 210 получает отклик касательно эффективности процесса бурения, выполняемого при выбранной второй характеристике изменения ускорения описанным со ссылкой на стадию 306 образом.
На стадии 314 контроллер сравнивает отклик, полученный для бурения в соответствии с первой характеристикой изменения ускорения, с откликом, полученным для бурения в соответствии со второй характеристикой изменения ускорения, для определения, была ли первая характеристика изменения ускорения более эффективной, чем вторая характеристика изменения ускорения. Как было описано выше, эффективность может быть, например, измерена увеличением скорости бурения, скорости проходки, сроком службы компонента и/или на основании других усовершенствований. Если контроллер 210 определяет, что первая характеристика изменения ускорения более эффективна, чем вторая характеристика изменения ускорения, тогда контроллер 210 приводит в действие верхний привод 140 в соответствии с первой характеристикой изменения ускорения, как указано на стадии 316. Если контроллер 210 определяет, что первая характеристика изменения ускорения не эффективнее, чем вторая характеристика изменения ускорения (или менее эффективна, чем вторая характеристика изменения ускорения), тогда контроллер 210 приводит в действие верхний привод в соответствии со второй характеристикой изменения ускорения, как указано на стадии 318. Контроллер 210 может осуществлять выбор на основании сравнения или альтернативно может представлять оператору данные или подсказку и ожидать, пока оператор не введет данные для выбора более эффективной характеристики изменения ускорения.
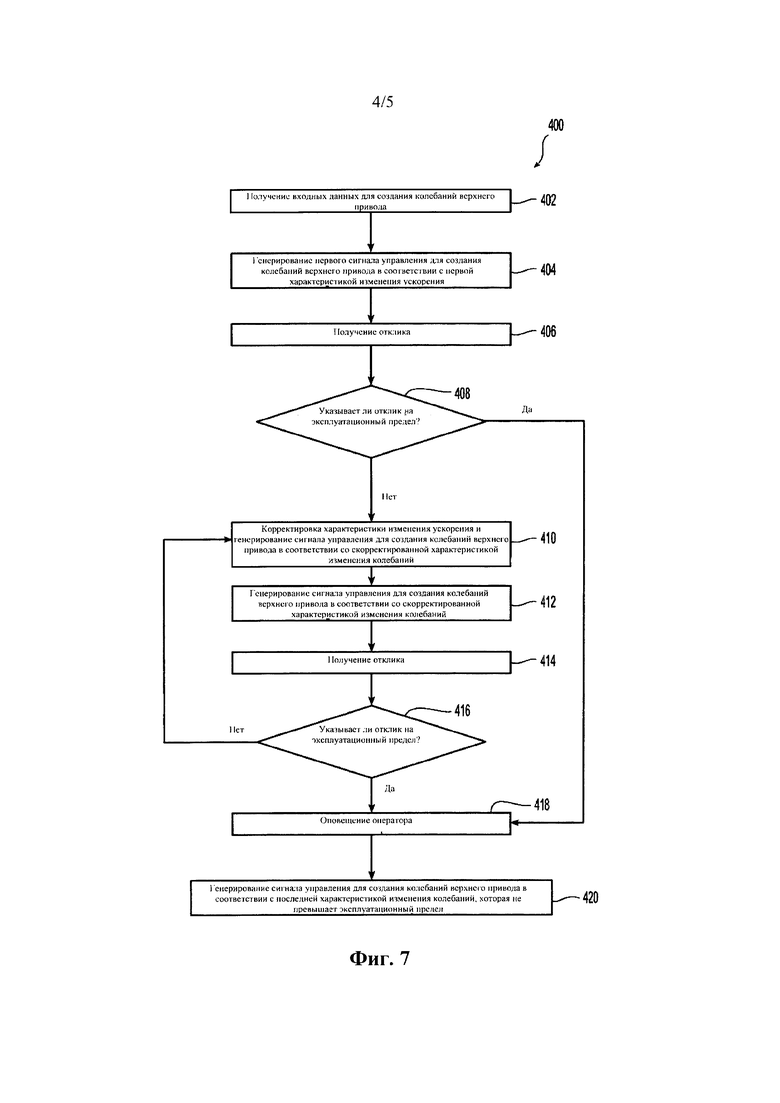
На Фиг. 7 показана другая блок-схема другого приведенного в качестве примера способа 400 повышения эффективности бурения посредством оптимизации параметров колебаний буровой системы 100. На Фиг. 7 контроллер 210 получает входные данные для создания колебаний верхнего привода 140. В соответствии с некоторыми вариантами осуществления контроллер 210 получает входные данные через пользовательский интерфейс 205. В соответствии с некоторыми вариантами осуществления на основании входных данных происходит выбор характеристики изменения ускорения из множества предварительно сохраненных характеристик изменения ускорения. На стадии 404 контроллер 210 генерирует первый сигнал управления для приведения в действие верхнего привода 140 в соответствии с выбранной первой характеристикой изменения ускорения, как указано на стадии 304. На стадии 406 система получает отклик, как было описано выше.
На стадии 408 контроллер 210 определяет, указывает ли отклик на то, что буровая система работала на эксплуатационном пределе. Система на эксплуатационном пределе, если параметры колебаний находятся на максимальных уровнях или рядом с этими уровнями, при этом не создавая отрицательный эффект на эксплуатационную эффективность буровой системы. Например, параметры колебаний могут быть оптимизированы, если максимальное резание или глубина проходки достигается без влияния на положение торца инструмента или направления бурения ВНА.
Если на стадии 408 отклик, полученный во время работы с первой характеристикой изменения ускорения, указывает на то, что буровая система достигла эксплуатационного предела, то есть если отклик указывает на то, что первая характеристика изменения ускорения обеспечивала максимальную эффективность бурения без отрицательного воздействия на буровую систему, тогда система может определить, что параметры колебаний оптимизированы. Если отклик указывает на то, что характеристика изменения ускорения соответствует эксплуатационному пределу, тогда способ переходит на стадию 418, а контроллер выдает оператору сообщение, что система работает при оптимальных параметрах колебаний.
Если на стадии 408 отклик указывает на то, что буровая система не достигла эксплуатационного предела, то есть если отклик не указал на отрицательное воздействие на буровую систему выбранной характеристикой изменения ускорения, тогда контроллер 210 может корректировать характеристику изменения ускорения для изменения параметров колебаний на стадии 410 с целью оптимизации параметров колебаний за счет приближения к эксплуатационному пределу.
Согласно одному аспекту, если верхний привод 140 вращается до заданного углового значения, например совершает один оборот, при этом отклик, указывающий на то, что дополнительное вращение не повысит общую эффективность процесса бурения, отсутствует, тогда контроллер 210 может дополнительно повернуть верхний привод 140 в том же направлении с целью идентификации эксплуатационного предела, тем самым идентификации оптимального параметра вращения для буровой системы. Таким образом, согласно одному аспекту для достижения оптимального параметра бурения, такого скорость проходки (ROP), может применяться итерационный подход, в котором последовательно используются различные характеристики изменения ускорения, при этом уменьшая или исключая нежелательные корректировки положения торца инструмента во время бурения.
Соответственно, на стадии 410 контроллер 210 может корректировать характеристику изменения ускорения с целью оптимизации параметров колебаний. Некоторые примеры корректировки характеристики изменения ускорения предусматривают, например, корректировку параметра колебаний для угла поворота, корректировку скорости изменения ускорения, корректировку скорости вращения и корректировку других параметров колебаний. Например, характеристики изменения ускорения согласно Фиг. 3-5 предусматривают одинаковые пределы углов поворота (один оборот), но разные характеристики изменения ускорения и разные скорости вращения, на что указывают их разные формы сигналов. Некоторые способы предусматривают корректировку характеристики изменения ускорения посредством регулирования с приращением одного из параметров колебаний характеристики изменения ускорения. Например, она может предусматривать увеличение или уменьшение с приращением значений вращения, увеличение или уменьшение с приращением ускорения или замедления вращения или скоростей вращения. В соответствии с одним вариантом осуществления вводимые пользователем данные позволяют корректировать характеристику изменения ускорения, указывая, какие значения регулировать, и указывая величину и размер регулировки.
На стадии 412 контроллер 210 может генерировать сигнал управления для создания колебаний верхнего привода в соответствии со скорректированной характеристикой изменения ускорения. На стадии 414 контроллер 210 получает отклик, как было описано выше. На стадии 416 контроллер 210 может снова выполнить оценку отклика для указания, работает ли буровая система на эксплуатационном пределе. Если информация указывает на то, что эксплуатационный предел не был достигнут, способ возвращается на стадию 410. Если эксплуатационный предел был достигнут, способ переходит на стадию 418, а оператор получает уведомление. Уведомление дает оператору полезную информацию, которая позволяет ему выполнить регулировку буровой системы, включая характеристику изменения ускорения, для приведения верхнего привода в действие с конкретными рабочими значениями.
На стадии 420 контроллер 210 генерирует сигнал управления верхним приводом 140 для создания колебаний верхнего привода в соответствии с последней характеристикой изменения колебаний, которая не превысила эксплуатационный предел. Соответственно, контроллер 210 может приводить в действие верхний привод на оптимальных значениях, которые не влияют отрицательно на буровую систему.
Графики, показанные на Фиг. 8, могут быть использованы для дополнительного описания способа, показанного и описанного со ссылкой на Фиг. 7. На Фиг. 8 показан первый график, на котором обозначено положение вращательного верхнего привода 140, и второй график, на котором обозначено положение или выравнивание торца инструмента или крутящий момент, определенный на ВНА 170. В момент времени t1 на Фиг. 8 контроллер 210 может генерировать первый сигнал в соответствии с первой характеристикой изменения ускорения для вращения бурильной колонны одним оборотом верхнего привода 140 в положительном направлении, что соответствует стадии 404 на Фиг. 7. В момент времени между t1 и t2 контроллер 210 может получать и оценивать отклик, что соответствует стадии 406. Как показано на Фиг. 8, положение торца инструмента или крутящий момент не изменились в результате качания бурильной колонны посредством верхнего привода в момент времени t1. Соответственно, в момент времени t2 контроллер 210 может корректировать характеристику изменения ускорения с учетом второго оборота в положительном направлении, как показано на стадии 410 на Фиг. 7. Как было описано выше, пользователь может выбирать, какой параметр должен быть скорректирован, а также размер или шаг приращения для такой корректировки. Опять-таки, в момент времени между t2 и t3 контроллер 210 может получать отклик от ВНА 170 или верхнего привода. В этом случае на Фиг. 8 видно, что положение торца инструмента или крутящий момент на ВНА 170 по-прежнему остались неизменными, как указано прямой линией в момент времени t3. Поэтому на стадии 416 на Фиг. 7 способ возвращается на стадию 410. Дополнительные корректировки характеристики изменения ускорения осуществляются на стадии 410. В момент времени t4 контроллер 210 обеспечивает вращение верхнего привода 140 в противоположном направлении в соответствии с характеристикой изменения ускорения до значения одного поворота в отрицательном направлении. Верхний привод 140 продолжает работать в соответствии с приведенным выше описанием.
В момент времени t6 на графике, показанном на Фиг. 8, отклик от ВНА 170 предоставляет указание на то, что колебания привели к вращению торца инструмента или к крутящему моменту. Так как отклик указывает на то, что эксплуатационный предел был превышен, контроллер 210 может оповещать оператора, как указано на стадии 418, и может задавать параметр колебаний в соответствии с оптимизированными параметрами. Соответственно, контроллер 210 продолжает следить за откликом для определения соответствующих параметров или значений, которые обеспечивают оптимальную характеристику изменения качания.
Ввиду приведенного выше описания и чертежей, специалисту в области техники, к которой относится настоящее изобретение, будет очевидно, что настоящее изобретение предлагает способ, предусматривающий создание колебаний, по меньшей мере, части бурильной колонны в соответствии с первой характеристикой изменения ускорения посредством верхнего привода, соединенного, по меньшей мере, опосредовано с бурильной колонной, создание колебаний, по меньшей мере, части бурильной колонны в соответствии со второй характеристикой изменения ускорения, отличной от первой характеристики изменения ускорения, посредством верхнего привода. Способ предусматривает создание колебаний, по меньшей мере, части бурильной колонны в соответствии с третьей характеристикой изменения ускорения посредством верхнего привода, причем третья характеристика изменения ускорения оптимизирована на основании отклика, связанного с колебаниями в соответствии с первой характеристикой изменения ускорения, и отклика, связанного с колебаниями в соответствии со второй характеристикой изменения ускорения. В соответствии с одним аспектом способ дополнительно предусматривает перед созданием колебаний в соответствии со второй характеристикой изменения ускорения выбор второй характеристики изменения ускорения на основании входных данных, введенных человеком-оператором. В соответствии с одним аспектом выбор второй характеристики изменения ускорения предусматривает выбор второй характеристики изменения ускорения из множества предварительно заданных характеристик изменения ускорения, сохраненных в контроллере, связанном с верхним приводом. В соответствии с одним аспектом выбор второй характеристики изменения ускорения предусматривает выбор корректировки первой характеристики изменения ускорения на основании входных данных, введенных человеком-оператором, причем корректировка предусматривает корректировку величины первого ускорения в соответствии с первой характеристикой изменения ускорения. В соответствии с одним аспектом отклик, связанный по меньшей мере с одной из первой и второй характеристик изменения ускорения, основан на данных, полученных по меньшей мере от одного из верхнего привода и компоновки низа бурильной колонны, соединенной с бурильной колонной. В соответствии с одним аспектом отклик, связанный по меньшей мере с одной из первой и второй характеристик изменения ускорения, относится к скорости проходки долота, соединенного с концом бурильной колонны. В соответствии с одним аспектом отклик, связанный по меньшей мере с одной из первой и второй характеристик изменения ускорения, относится к положению торца долота, соединенного с концом бурильной колонны. В соответствии с одним аспектом отклик, связанный по меньшей мере с одной из первой и второй характеристик изменения ускорения, относится к данным, полученным по меньшей мере от одного из верхнего привода и компоновки низа бурильной колонны, соединенной с бурильной колонной. В соответствии с одним аспектом первая характеристика изменения ускорения предусматривает форму сигнала, выбранную из группы, состоящей из: синусоидальной, ступенчатой, треугольной формы и их комбинаций. В соответствии с одним аспектом вторая характеристика изменения ускорения предусматривает ту же форму сигнала, что и для первой характеристики изменения ускорения, и характеризуется другой величиной ускорения.
Также настоящее изобретение предоставляет способ, предусматривающий: генерирование сигнала управления для верхнего привода для создания колебаний, по меньшей мере, части бурильной колонны на основании первых параметров колебаний, причем первые параметры колебаний предусматривают, по меньшей мере, скорость изменения ускорения, предельное угловое положение и предельную скорость; получение отклика от компоновки низа бурильной колонны, соединенной с бурильной колонной, который указывает на то, что колебания, по меньшей мере, части бурильной колонны на основании первых параметров колебаний не изменили положение торца инструмента на противоположном относительно верхнего привода конце бурильной колонны; корректировку с приращением по меньшей мере одного из первых параметров колебаний и корректировку сигнала управления на основании скорректированных параметров колебаний; получение отклика от компоновки низа бурильной колонны, который указывает на то, что колебания, по меньшей мере, части бурильной колонны на основании скорректированных параметров колебаний изменили положение торца инструмента; и дополнительную корректировку сигнала управления для создания колебаний, по меньшей мере, части бурильной колонны на основании набора оптимизированных параметров колебаний, заданных на уровнях, ниже скорректированных параметров колебаний. В соответствии с одним аспектом дополнительная корректировка сигнала управления для создания колебаний, по меньшей мере, части бурильной колонны на основании оптимизированных параметров колебаний предусматривает задание параметров равными первым параметрам колебаний. В соответствии с одним аспектом корректировка с приращением по меньшей мере одного из первых параметров колебаний предусматривает корректировку скорости изменения ускорения. В соответствии с одним аспектом способ дополнительно предусматривает получение вводимых оператором данных, которые регулируют с приращением один из первых параметров колебаний. В соответствии с одним аспектом вводимые оператором данные определяют, какой из первых параметров колебаний подлежит регулировке с приращением. В соответствии с одним аспектом вводимые оператором данные указывают на шаг регулировки с приращением. В соответствии с одним аспектом корректировка с приращением по меньшей мере одного из первых параметров колебаний предусматривает увеличение с приращением как скорости изменения ускорения, так и предельной скорости. В соответствии с одним аспектом способ дополнительно предусматривает привязку первого сигнала управления, по меньшей мере частично, к диаметру и длине бурильной колонны. В соответствии с одним аспектом корректировку с приращением по меньшей мере одного из первых параметров колебаний осуществляют после получения отклика от компоновки низа бурильной колонны, который указывает на то, что колебания, по меньшей мере, части бурильной колонны на основании первых параметров колебаний не изменили положение торца инструмента. В соответствии с одним аспектом корректировка с приращением по меньшей мере одного из первых параметров колебаний предусматривает корректировку формы сигнала ускорения.
В приведенном выше описании раскрыты признаки нескольких вариантов осуществления, так что специалисту в области техники, к которой относится настоящее изобретение, будут понятны аспекты настоящего изобретения. Такие признаки могут быть заменены любыми из многочисленных эквивалентных альтернатив, из которых только некоторые представлены в настоящем документе. Специалист в области техники, к которой относится настоящее изобретение, поймет, что настоящее изобретение можно использовать как базу для создания или модификации других процессов или конструкций, которые выполняют те же функции и/или обеспечивают достижение тех же преимуществ представленных вариантов осуществления. Специалист в области техники, к которой относится настоящее изобретение, поймет, что осуществление таких эквивалентных конструкций не выходит за пределы объема настоящего изобретения и что они представляют лишь многочисленные изменения, замены или подстановки, которые не выходят за пределы объема настоящего изобретения.
Изобретение относится к вариантам способа создания колебаний бурильной колонны. Техническим результатом является повышение эффективности бурения. Способ создания колебаний части бурильной колонны, предусматривающий создание колебаний, по меньшей мере, части бурильной колонны в соответствии с первой характеристикой изменения ускорения посредством верхнего привода, соединенного, по меньшей мере, опосредовано с бурильной колонной, причем первая характеристика ускорения содержит предварительно сохраненные параметры колебаний, включая первую характеристику ускорения, характеризующуюся первой формой сигнала, определенной первой формой волны, выбранной из группы, состоящей из: синусоидальной, ступенчатой и треугольной формы, создание колебаний, по меньшей мере, части бурильной колонны в соответствии со второй характеристикой изменения ускорения, отличной от первой характеристики изменения ускорения, посредством верхнего привода, причем вторая характеристика ускорения содержит предварительно сохраненные параметры колебаний, включая вторую характеристику ускорения, предусматривающую вторую форму сигнала, определенную второй формой волны, выбранной из группы, состоящей из: синусоидальной, ступенчатой и треугольной формы, и переход между любой из синусоидальной, ступенчатой и треугольной формы волны, связанной с первой формой сигнала, причем вторая форма волны, определяющая вторую форму сигнала, отличается от первой формы волны, определяющей первую форму сигнала, и создание колебаний, по меньшей мере, части бурильной колонны в соответствии с третьей характеристикой изменения ускорения посредством верхнего привода, причем третья характеристика изменения ускорения оптимизирована на основании отклика, связанного с колебаниями в соответствии с первой характеристикой изменения ускорения, и отклика, связанного с колебаниями в соответствии со второй характеристикой изменения ускорения. 2 н. и 18 з.п. ф-лы, 8 ил.
1. Способ создания колебаний части бурильной колонны, предусматривающий:
создание колебаний, по меньшей мере, части бурильной колонны в соответствии с первой характеристикой изменения ускорения посредством верхнего привода, соединенного, по меньшей мере, опосредовано с бурильной колонной, причем первая характеристика ускорения содержит предварительно сохраненные параметры колебаний, включая первую характеристику ускорения, характеризующуюся первой формой сигнала, определенной первой формой волны, выбранной из группы, состоящей из: синусоидальной, ступенчатой и треугольной формы;
создание колебаний, по меньшей мере, части бурильной колонны в соответствии со второй характеристикой изменения ускорения, отличной от первой характеристики изменения ускорения, посредством верхнего привода, причем вторая характеристика ускорения содержит предварительно сохраненные параметры колебаний, включая вторую характеристику ускорения, предусматривающую вторую форму сигнала, определенную второй формой волны, выбранной из группы, состоящей из: синусоидальной, ступенчатой и треугольной формы, и переход между любой из синусоидальной, ступенчатой и треугольной формы волны, связанной с первой формой сигнала, причем вторая форма волны, определяющая вторую форму сигнала, отличается от первой формы волны, определяющей первую форму сигнала; и
создание колебаний, по меньшей мере, части бурильной колонны в соответствии с третьей характеристикой изменения ускорения посредством верхнего привода, причем третья характеристика изменения ускорения оптимизирована на основании отклика, связанного с колебаниями в соответствии с первой характеристикой изменения ускорения, и отклика, связанного с колебаниями в соответствии со второй характеристикой изменения ускорения.
2. Способ по п. 1, в котором перед созданием колебаний в соответствии со второй характеристикой изменения ускорения дополнительно предусматривается выбор второй характеристики изменения ускорения на основании входных данных, введенных человеком-оператором.
3. Способ по п. 2, в котором выбор второй характеристики изменения ускорения предусматривает выбор второй характеристики изменения ускорения из множества предварительно заданных характеристик изменения ускорения, сохраненных в контроллере, связанном с верхним приводом.
4. Способ по п. 2, в котором выбор второй характеристики изменения ускорения предусматривает выбор корректировки первой характеристики изменения ускорения на основании входных данных, введенных человеком-оператором, причем корректировка предусматривает корректировку величины первого ускорения в соответствии с первой характеристикой изменения ускорения.
5. Способ по п. 1, в котором отклик, связанный по меньшей мере с одной из первой и второй характеристик изменения ускорения, основан на данных, полученных по меньшей мере от одного из верхнего привода и компоновки низа бурильной колонны, соединенной с бурильной колонной.
6. Способ по п. 1, в котором отклик, связанный по меньшей мере с одной из первой и второй характеристик изменения ускорения, относится к скорости проходки долота, соединенного с концом бурильной колонны.
7. Способ по п. 1, в котором отклик, связанный по меньшей мере с одной из первой и второй характеристик изменения ускорения, относится к положению торца долота, соединенного с концом бурильной колонны.
8. Способ по п. 1, в котором отклик, связанный по меньшей мере с одной из первой и второй характеристик изменения ускорения, относится к данным крутящего момента, полученным по меньшей мере от одного из верхнего привода и компоновки низа бурильной колонны, соединенной с бурильной колонной.
9. Способ по п. 1, в котором первая характеристика изменения ускорения предусматривает форму сигнала, выбранную из группы, состоящей из синусоидальной, ступенчатой, треугольной формы и их комбинаций.
10. Способ по п. 9, в котором вторая характеристика изменения ускорения предусматривает ту же форму сигнала, что и для первой характеристики изменения ускорения, и характеризуется другой величиной ускорения.
11. Способ создания колебаний части бурильной колонны, предусматривающий:
генерирование сигнала управления для верхнего привода для создания колебаний, по меньшей мере, части бурильной колонны на основании первых параметров колебаний, причем первые параметры колебаний предусматривают, по меньшей мере, скорость изменения ускорения, предельное угловое положение и предельную скорость;
получение отклика от компоновки низа бурильной колонны, соединенной с бурильной колонной, который указывает на то, что колебания, по меньшей мере, части бурильной колонны на основании первых параметров колебаний не изменили положение торца инструмента на противоположном относительно верхнего привода конце бурильной колонны;
в ответ на отклик, указывающий на то, что колебания не изменили положение торца инструмента, корректировку с приращением по меньшей мере одного из первых параметров колебаний и корректировку сигнала управления на основании скорректированных параметров колебаний;
получение отклика от компоновки низа бурильной колонны, который указывает на то, что колебания, по меньшей мере, части бурильной колонны на основании скорректированных параметров колебаний изменили положение торца инструмента; и
в ответ на отклик, указывающий на то, что колебания изменили положение торца инструмента, дополнительную корректировку сигнала управления для создания колебаний, по меньшей мере, части бурильной колонны на основании набора оптимизированных параметров колебаний, которые предусматривают по меньшей мере одно из новой скорости изменения ускорений, нового предельного углового положения и новой предельной скорости, причем одно из новой скорости изменения ускорений, нового предельного углового положения и новой предельной скорости характеризуется значением, которое меньше соответствующего значения скорректированных параметров колебаний.
12. Способ по п. 11, в котором дополнительная корректировка сигнала управления для создания колебаний, по меньшей мере, части бурильной колонны на основании оптимизированных параметров колебаний предусматривает задание одного или нескольких параметров, равными первым параметрам колебаний.
13. Способ по п. 11, в котором корректировка с приращением по меньшей мере одного из первых параметров колебаний предусматривает корректировку скорости изменения ускорения.
14. Способ по п. 11, который дополнительно предусматривает получение вводимых оператором данных, которые регулируют с приращением один из первых параметров колебаний.
15. Способ по п. 14, в котором вводимые оператором данные определяют, какой из первых параметров колебаний подлежит регулировке с приращением.
16. Способ по п. 14, в котором вводимые оператором данные указывают на шаг регулировки с приращением.
17. Способ по п. 11, в котором корректировка с приращением по меньшей мере одного из первых параметров колебаний предусматривает увеличение с приращением как скорости изменения ускорения, так и предельной скорости.
18. Способ по п. 11, который дополнительно предусматривает привязку первого сигнала управления, по меньшей мере частично, к диаметру и длине бурильной колонны.
19. Способ по п. 11, в котором корректировку с приращением по меньшей мере одного из первых параметров колебаний осуществляют после получения отклика от компоновки низа бурильной колонны, который указывает на то, что колебания, по меньшей мере, части бурильной колонны на основании первых параметров колебаний не изменили положение торца инструмента.
20. Способ по п. 11, в котором корректировка с приращением по меньшей мере одного из первых параметров колебаний предусматривает корректировку формы сигнала ускорения.
| US 20070256863 А1, 08.11.2007 | |||
| US 20060081399 А1, 20.04.2006 | |||
| US 20060195307 А1, 31.08.2006 | |||
| СИСТЕМА УПРАВЛЕНИЯ ПРОЦЕССОМ БУРЕНИЯ | 2001 |
|
RU2208153C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЖЕСТКОСТИ КОЛОННЫ БУРИЛЬНЫХ ТРУБ | 1999 |
|
RU2228438C2 |

