Область техники
Настоящее изобретение относится к способу управления системой сельхозмашин при обработке территории, подлежащей обработке, при котором для системы машин вырабатывают маршрут, содержащий рабочие проходы, вдоль которых система машин проходит при обработке территории, и проходы разворота на краю поля, вдоль которых система машин проходит от одного рабочего прохода к следующему подлежащему выполнению рабочему проходу, причем к концу одного рабочего прохода и/или в ходе движения по следующему за ним проходу разворота и/или к началу последующего рабочего прохода системой машин автоматически выполняется последовательность технологических шагов при развороте. Кроме того, изобретение относится к автоматической системе управления системой сельхозмашин на подлежащей обработке территории, посредством которой может осуществляться данный способ.
Уровень техники
В последние годы вслед за постоянным ростом производительности систем сельхозмашин, то есть рабочих машин, таких как зерноуборочные комбайны или полевые измельчители, тракторов с различным навесным оборудованием, таким как разбрасыватели удобрений, сеялки, опрыскиватели, сеноворошилки, валкователи, все большее значение получает планирование рабочего процесса. В особенности при уборке урожая для выполнения отдельных рабочих этапов часто по погодным условиям может оказаться в распоряжении только ограниченный промежуток времени, который зачастую используется не оптимальным образом из-за отсутствия планирования использования машин. Кроме того, точное планирование использования важно для того, чтобы реализовать на практике максимальную теоретически возможную производительность машин. Для достижения этой цели оптимального проведения рабочего процесса были разработаны так называемые системы и способы маршрутизации, с помощью которых для соответствующей системы машин определяется оптимальный маршрут при обработке определенной территории, например определенной делянки или площади.
Конкретная система машин в зависимости от ее оснащения может направляться вдоль этого маршрута либо с автоматическим управлением, то есть с помощью автоматической системы рулевого управления, либо с полуавтоматическим или просто ручным управлением при поддержке соответствующего индикаторного устройства, при этом оператор должен стараться выдерживать положение машины на виртуальной линии движения. Обычно такие системы маршрутизации или автоматические системы рулевого управления работают со спутниковыми навигационными системами, например, с помощью приемников системы GPS (Global Positioning System - глобальная система навигации и определения местоположения). Для повышения точности существуют различные способы корректировки, такие как, например, предназначенная для способа GPS дифференциальная система DGPS (в которой приемник GPS кроме спутниковых сигналов использует поправки, генерируемые опорной станцией, расположенной в фиксированном месте с известными координатами). Такая система маршрутизации описана, например, в патентном документе ЕР 0821296 В1. Как было пояснено выше, такой запланированный маршрут, как правило, содержит не только запланированные проходы внутри подлежащей обработке площади, то есть отдельные «рабочие проходы» на поле, но также и проходы разворота для выполнения маневров поворота в областях разворота на краю поля, выполняемые для перехода от одного рабочего прохода к рабочему проходу, который в большинстве случаев расположен непосредственно рядом с предыдущим или проходит параллельно на некотором расстоянии от него.
Указанный способ или система маршрутизации уже значительно облегчают работу оператора системы сельхозмашин, так как с помощью этих устройств и способа движение на длинных участках пути выполняется автоматически. Вместе с тем, при разворотах системы машин, и в особенности при выезде из рабочего прохода и при въезде в новый рабочий проход, оператор системы машин должен следить за множеством функций и управлять ими. Так, при выезде из рабочего прохода практически всегда поднимают почвообрабатывающее орудие, включают другую передачу и изменяют скорость. Соответственно, при въезде в новый рабочий проход нужно снова включить нужную передачу, изменить скорость и опустить рабочее орудие. Весь рабочий процесс, который внешне выглядит относительно простым, в действительности разделяется на множество отдельных рабочих (технологических) шагов. Так, например, для трактора с оборудованием сеялки, которое состоит из переднего полевого катка, ротора, бороны и сеялки, полная последовательность технологических шагов, которую нужно выполнить при маневрах поворота и которая называется далее «последовательностью технологических шагов при развороте», разделяется на следующие отдельные технологические шаги или операции:
1. Произвести подъем переднего подъемного механизма.
2. Произвести подъем заднего подъемного механизма.
3. Отключить вал отбора мощности.
4. Включить индикатор пути движения.
5. Выключить запорное устройство дифференциала.
6. Отключить подачу газа.
7. Включить низкую передачу.
В заключение выполняют собственно процесс разворота. При въезде в следующий рабочий проход выполняют следующие технологические шаги:
1. Произвести опускание заднего подъемного механизма.
2. Подключить вал отбора мощности.
3. Включить подачу газа.
4. Произвести опускание переднего подъемного механизма.
5. Опустить индикатор пути движения.
6. Включить высокую передачу.
7. Включить запорное устройство дифференциала.
Уже этот пример показывает, что такой процесс разворота требует значительного опыта и полной концентрации водителя. Для того чтобы по возможности разгрузить водителя от этих операций, в последние годы на рынке появилась так называемая «система управления разворотом на краю поля» (называемая также «полевой системой управления» или «системой управления на поворотной полосе»). С помощью таких систем управления разворотом на краю поля, которыми могут дополнительно оснащаться трактора и другие сельхозмашины, управление последовательностью технологических шагов при развороте на краю поля может производиться автоматически. Кроме того, различные последовательности технологических шагов при развороте могут быть заучены путем того, что оператор включает систему управления разворотом на краю поля в режиме обучения и выполняет маневры при развороте, так что отдельные технологические шаги воспринимаются и записываются системой управления разворотом.
Проблема в использовании такой системы состоит в том, что управление осуществляется либо в жесткой последовательности по времени, либо, как в автоматической системе по патентному документу ЕР 1380202 В1, в жесткой последовательности в зависимости от пройденных участков пути. При управлении по времени последовательность технологических шагов при развороте точно «проигрывается» так, как она была заучена в режиме обучения. Это означает, что система машин должна выполнять маневр поворота всегда за одно и то же время. При управлении в функции участков пути заложенные в памяти операции всегда выполняются на одних и тех же дистанциях, как это было заучено, независимо от того, движется ли система машин с такой же скоростью, как в режиме обучения, или быстрее или медленнее.
Оба способа могут достаточно успешно использоваться в тех случаях, когда маневры между двумя рабочими проходами всегда выполняются одинаково, то есть когда проходы разворота одинаковы. С другой стороны, однако, не следует полагаться на то, что оптимальный маршрут для обработки площади предусматривает одинаковые проходы разворота между отдельными рабочими проходами. Так, например, может быть выгодно выбрать такую стратегию обработки, при которой очередность подлежащих обработке рабочих проходов на территории не всегда связана с одинаковыми проходами разворота. Кроме того, препятствия в области разворота могут приводить к тому, что проход разворота не может быть выполнен в соответствии с планом.
При этом каждое значительное изменение прохода разворота означает, что последовательности технологических шагов при развороте, заложенные в системе управления разворотом на краю поля, уже не согласуются с проходом разворота и не могут использоваться без риска ошибок, а в худшем случае и аварий. Это означает, что в конечном счете не обеспечивается возможность выбора оптимального маршрута и автоматического движения по нему независимо от заложенной последовательности технологических шагов при развороте.
Раскрытие изобретения
Задача, на решение которой направлено настоящее изобретение, заключается в создании способа управления системой сельхозмашин описанного типа, а также автоматической системы для осуществления этого способа с устранением указанных выше недостатков.
В соответствии с изобретением решение поставленной задачи достигается путем создания способа по пункту 1 и автоматической системы управления по пункту 10 формулы изобретения.
Предложен способ управления системой сельхозмашин при обработке территории, подлежащей обработке, при котором для системы машин вырабатывают маршрут, содержащий рабочие проходы, вдоль которых система машин проходит при обработке территории, и проходы разворота на краю поля, вдоль которых система машин проходит от одного рабочего прохода к следующему подлежащему выполнению рабочему проходу. К концу рабочего прохода и/или в ходе движения по следующему за ним проходу разворота и/или к началу последующего рабочего прохода система машин автоматически выполняет последовательность технологических (рабочих) шагов или операций при развороте. Согласно изобретению последовательность технологических шагов при развороте динамично актуализируют и выполняют в зависимости от действительного местоположения системы машин и в зависимости от следующего подлежащего выполнению рабочего прохода, в особенности от его начальной точки и направления. Другими словами, в процессе разворота оставшиеся для выполнения технологические шаги выполняют в соответствии с актуализированной последовательностью технологических шагов при развороте.
Таким образом, способ по изобретению обеспечивает непрерывную синхронизацию последовательности технологических шагов при развороте с данным проходом разворота и ее правильное выполнение независимо от того, какой вид или профиль имеет этот проход разворота. При этом полная последовательность технологических шагов при развороте может управляться частично в зависимости от времени, а частично в зависимости от пройденного пути. Так, например, может быть установлено условие, что в точно определенном местоположении, то есть на определенном расстоянии после выезда из «старого» рабочего прохода или перед въездом в «новый» рабочий проход, должен быть выполнен определенный технологический шаг. Однако может быть также предписано, что определенный технологический шаг должен занимать определенный промежуток времени. Это важно потому, что, например, в тракторе посредством одних и тех же гидравлических клапанов активизируется выполнение различных функций в зависимости от того, какое оборудование подсоединено к данному гидравлическому клапану. Различные функции занимают, как правило, точно определенное время. Поэтому для выполнения определенной функции нужно обеспечить, чтобы для конкретного оборудования гидравлический клапан приводился в действие в течение определенного промежутка времени. Однако при этом такое управление по времени также может быть динамично актуализировано и может зависеть от того, какие технологические шаги уже были выполнены и какие должны быть выполнены впоследствии. Так, например, давление масла в гидролиниях повышается, если число оборотов мотора было повышено перед данным технологическим шагом. В этом случае перемещение части оборудования гидравлическими средствами может быть выполнено быстрее, то есть промежуток времени привода в действие гидравлического клапана может быть меньше, чем если бы число оборотов мотора было повышено только после выполнения этого шага, управляемого по времени.
При актуализации последовательности технологических шагов при развороте может в особенности учитываться, сколько времени еще требуется системе машин для прохода от ее действительного местоположения до точки въезда в следующий рабочий проход и сколько технологических шагов еще нужно выполнить. Соответственно, технологические шаги могут быть вновь пересортированы или даже полностью опущены. Так, например, при первоначально запланированной последовательности технологических шагов при развороте может быть предусмотрено, что при выезде из рабочего прохода вначале снижают число оборотов мотора, а затем поднимают жатвенный аппарат, а перед въездом в новый рабочий проход вначале опускают жатвенный аппарат, а затем вновь повышают число оборотов мотора. Если в конкретном случае проход разворота оказывается короче запланированного и времени в распоряжении оказывается меньше, чем это было запланировано в последовательности технологических шагов при развороте, эта последовательность технологических шагов при развороте может быть актуализирована таким образом, что при выезде из рабочего прохода вначале поднимают жатвенный аппарат, а затем снижают число оборотов мотора, и наоборот, перед въездом в новый рабочий проход вначале повышают число оборотов мотора, а затем опускают жатвенный аппарат. Получаемое преимущество состоит в том, что при высоком числе оборотов мотора во время изменения высотного положения жатвенного аппарата давление масла выше и эта перестановка может быть выполнена быстрее. Если времени при развороте совсем мало, последовательность технологических шагов при развороте может быть актуализирована таким образом, что число оборотов мотора вообще не снижают, а только поднимают и опускают жатвенный аппарат.
Актуализация последовательности технологических шагов при развороте может производиться уже тогда, когда система машин еще находится в предыдущем рабочем проходе и возникает необходимость изменения вследствие нового планирования прохода разворота, например, при изменении выбора следующего рабочего прохода. Однако актуализация может осуществляться также и в любой момент во время движения по проходу разворота, с тем чтобы оперативно реагировать, например, в тех случаях, когда оператор уводит систему машин от предусмотренного прохода разворота из-за препятствий или при скольжении на скользком месте, так что запланированное время разворота не может быть выдержано.
За счет способа управления по изобретению обеспечивается возможность планировать оптимальный маршрут для системы машин и совершать движение по нему с автоматическим управлением почти независимо от последовательности технологических (рабочих) шагов при развороте, первоначально запланированной, например, заученной системой управления разворотом. При этом даже при незапланированных событиях эта последовательность технологических шагов при развороте может быть выполнена автоматически, в большинстве случаев без дополнительного вмешательства водителя.
Для соответствующей автоматической системы управления системой сельхозмашин в соответствии с описанным способом необходимы следующие компоненты:
- блок определения местоположения для автоматического определения данных действительного местоположения системы машин,
- система маршрутизации для выработки маршрута для системы машин. Эта система маршрутизации может быть интегрирована в самой системе машин, например, в виде программного обеспечения в процессоре устройства управления системы машин. Однако она может быть также внешней системой маршрутизации, например, в центральном вычислительном устройстве хозяйства. В этом случае запланированные маршруты могут передаваться на устройство управления системы машин либо с помощью носителей данных, либо по радио. Этот маршрут содержит рабочие проходы, вдоль которых система машин проходит при обработке территории с автоматическим, полуавтоматическим или ручным управлением. Кроме того, маршрут может содержать предварительно запланированные проходы разворота, вдоль которых система машин проходит от одного рабочего прохода к следующему подлежащему выполнению рабочему проходу;
- система управления разворотом на краю поля, которая управляет системой машин таким образом, что к концу одного рабочего прохода и/или в ходе движения по следующему за ним проходу разворота и/или к началу последующего рабочего прохода системой машин автоматически выполняется последовательность технологических шагов при развороте, причем система управления разворотом на краю поля выполнена таким образом, что последовательность технологических шагов при развороте динамично актуализируется и выполняется в зависимости от действительного местоположения системы машин и в зависимости от рабочего следующего прохода, подлежащего выполнению.
Само собой разумеется, что такая автоматическая система управления содержит соответствующие запоминающие средства для записи запланированных маршрутов, в особенности запланированных рабочих проходов и проходов разворота, а также запланированных и актуализированных последовательностей технологических шагов при развороте.
В зависимых пунктах формулы изобретения и последующем описании представлены особенно предпочтительные примеры осуществления и дальнейшего развития изобретения, при этом автоматическая система управления по изобретению может быть модифицирована также в соответствии с решениями по зависимым пунктам, относящимся к способу по изобретению.
Согласно особенно предпочтительному примеру осуществления в зависимости от текущего проходимого рабочего прохода, подлежащего последующему выполнению, географических данных области разворота на краю поля, а также определенных параметров машин системы сельхозмашин проход разворота между текущим проходимым рабочим проходом и рабочим проходом, подлежащим последующему выполнению, определяют таким образом, что система машин оптимальным образом входит в рабочий проход, подлежащий последующему выполнению. К географическим данным области разворота относится, например, информация о размерах и положении имеющейся в распоряжении самой области разворота. Эта информация может быть получена, например, в процессе уборки площади из профиля наружных кромок площади и кромок растительности между конечной точкой обрабатываемого рабочего прохода и начальной точкой следующего рабочего прохода, подлежащего выполнению. К этой информации могут также относиться данные (размеры и положение) о находящихся в области разворота препятствиях, зонах безопасности и других местах, по которым не должно проходить транспортное средство. К параметрам машин относятся, в первую очередь, рабочая ширина захвата и/или круг поворота системы машин. Кроме того, могут учитываться и другие параметры, в особенности имеющие значение для въезда в рабочий проход.
Предпочтительно во время выполнения прохода разворота сам этот проход разворота также динамично актуализируют в зависимости от действительного местоположения системы машин. Это означает, что когда водитель, например, должен объехать неизвестное до тех пор препятствие или транспортное средство соскальзывает на скользкой или наклонной поверхности, незамедлительно рассчитывается новый проход разворота от данного местоположения до входа в следующий рабочий проход, чтобы обеспечить оптимальный въезд системы машин в рабочий проход, подлежащий выполнению.
Таким образом, способ управления осуществляется в конечном счете независимо от того, какие рабочие проходы выполняются один за другим. В принципе, как и в большей части классических стратегий обработки, могут выбираться всегда наиболее близкие соседние рабочие проходы. Однако может выбираться также любой другой рабочий проход, оптимальный в аспекте маршрутизации. Особенность состоит также в том, что водитель может в любой момент задать следующий желательный рабочий проход. Это может быть проход, при котором можно произвести разгрузку бункера убранной массы, или проход с убираемой культурой определенного качества. Водитель может также выбрать определенный проход с ранее установленными маркировочными знаками. При этом, благодаря динамичной актуализации прохода разворота, водитель может выбрать другой проход не только при движении по предыдущему рабочему проходу, но также во время выполнения запланированного прохода разворота и таким образом гибко реагировать на любое событие и далее следовать по вновь рассчитанному оптимизированному маршруту.
В особенно предпочтительном примере осуществления при выработке маршрута для системы машин рабочие проходы и очередность рабочих проходов выбирают и устанавливают в зависимости от определенных параметров системы машин, в особенности их рабочей ширины захвата и/или круга поворота. Также особенно предпочтительно выбирать или устанавливать рабочие проходы и очередность рабочих проходов в зависимости от профиля возможных проходов разворота между рабочими проходами. За счет такой обратной связи между оптимизацией рабочих проходов для обработки территории и возможными проходами разворота при маршрутизации может надежно обеспечиваться учет не только самих по себе рабочих проходов, но также времени и расстояний, необходимых для выполнения проходов разворота. За счет соответствующего тщательного планирования маневров поворота обеспечивается возможность значительного повышения эффективности. При этом, как было описано выше, при движении вдоль одного рабочего прохода в любой момент может быть динамично актуализирована очередность выполнения оставшихся рабочих проходов. Так, например, в том случае если оказывается, что зерновой бункер зерноуборочного комбайна заполнен и требуется его разгрузка, очередность подлежащих выполнению рабочих проходов может быть изменена таким образом, что при следующем рабочем проходе можно произвести эту разгрузку.
Предпочтительно проход разворота между двумя рабочими проходами может быть относительно просто выработан путем использования отдельных дуг поворота, при этом каждая дуга поворота определяется следующими параметрами:
центр кривизны дуги поворота;
радиус поворота, в качестве которого может быть принят, например, минимальный возможный круг поворота системы машин;
размер дуги, который может быть задан, например, начальной и конечной величинами и угловым направлением или начальной величиной и векторной разностью углов между начальной и конечной величинами;
направление движения вдоль дуги поворота;
данные о примыкающей дуге поворота (включая промежуточные прямолинейные соединительные участки).
Кроме того, для определения полного прохода разворота требуются также начальная точка поворота и конечная точка поворота и направление ориентации, то есть направление движения. Далее полный проход разворота должен быть выработан путем сопряжения отдельных дуг поворота, начиная с начальной точки поворота и до конечной точки поворота, с промежуточными участками пути.
Для выполнения маневров поворота в системе управления может быть реализован модуль планирования маневров поворота, предпочтительно в виде модуля программного обеспечения. Для того чтобы этот модуль планирования маневров поворота мог вырабатывать проход разворота в соответствии с описанным способом, на его входе данных необходимы, по меньшей мере, следующие параметры:
- начальная точка поворота с ориентацией прохода;
- конечная точка поворота с ориентацией прохода;
- минимальный возможный радиус поворота системы машин, который она может выполнять автоматически;
- профиль кромки растительности между начальной и конечной точками поворота;
- профиль кромки площади.
Кроме того, в распоряжение модуля планирования маневров поворота должны быть предоставлены данные об имеющихся препятствиях и требуемых дистанциях безопасности. Далее описанные выше данные для выработки дуг поворота и направление движения системы машин могут быть выданы модулем планирования маневров поворота. Эти данные могут быть переданы, например, на автоматическую систему рулевого управления, которая обеспечивает движение системы машин к начальным точкам разворота, выполнение дуг поворота в нужном направлении и в заключение подход к начальной точке нового рабочего прохода, так что система машин автоматически направляется вдоль запланированного прохода разворота на краю поля.
При этом, как это было описано вначале, система машин может направляться по проходу разворота полностью автоматически. Дополнительно или в целях ручного или полуавтоматического способа вождения системы машин вдоль прохода разворота предпочтительно проход разворота указывается оператору системы машин на индикаторном устройстве в специальном режиме «указания разворота». В таком представлении информации (т.е. при такой индикации) могут указываться текущий выполняемый рабочий проход, запланированный «заданный рабочий проход» и запланированные проходы разворота. Кроме того, могут быть вызваны также другие рабочие проходы, такие как возможный ближайший рабочий проход или рабочие проходы с определенными дополнительными параметрами. Для рабочих проходов могут быть представлены дополнительные данные, такие как их номера, сведения о том, содержит ли рабочий проход маркировку пути, длины рабочих проходов и другие характеристики, введенные и выбранные оператором. При ориентации и масштабировании представления информации (индикации) возможно использование следующих методов, свойств или настроек:
- ориентация индикации привязана к ориентации транспортного средства (непрерывно или дискретно с равномерным угловым шагом);
- ориентация индикации привязана к текущим выполняемым рабочим проходам или к текущему проходу разворота (непрерывно или дискретно с равномерным угловым шагом);
- ориентация индикации привязана в зависимости от отклонения ориентации транспортного средства относительно запланированной ориентации прохода;
- ориентация индикации по странам света (с возможностью выбора или установки);
- масштабирование индикации производится в соответствии с рабочей шириной захвата системы машин;
- масштабирование индикации производится в зависимости от длины запланированных или предлагаемых проходов разворота;
- масштабирование индикации производится в зависимости от ширины борозд, на которых работает система машин;
- масштабирование индикации производится в зависимости от величины площади;
- масштабирование индикации производится в зависимости от местоположения других участников рабочего процесса, например других машин комплекса или перегрузочного транспортного средства.
Предпочтительно масштабирование может быть введено или изменено вручную. В частности, это может осуществляться путем ввода в жесткую масштабную сетку.
Кроме того, для различных функций движения обеспечивается возможность выбора, или задания, или предварительного задания различных вариантов выполнения.
Для такой индикации разворота в кабине водителя системы машин может быть расположен отдельный дисплей. Однако возможно также представить такую индикацию на том дисплее, который используется также для другой индикации, например, для представления всего поля. Замена такой индикации на индикацию в режиме индикации разворота может производиться вручную или быть предварительно запрограммирована. Автоматическая замена индикации возможна, например, при соответствующем программировании, как только распознается конец рабочего прохода или достигается запланированная область разворота в пределах заданного маршрута. Такая область замены может распознаваться, например, когда с помощью датчиков устанавливается, что система машин находится на конце растительности. Однако возможно также сравнение данных действительного местоположения с заложенными в запоминающем устройстве картографическими данными площади. При этом индикация переключается, когда система машин приближается к кромке площади или границе участка площади (кромке борозды) или подобной границе.
Равным образом продолжительность индикации может быть при привязана к определенной области площади или к определенному или регулируемому промежутку времени, к сигналам датчика, к сигналам автоматической системы рулевого управления или другим событиям.
Предпочтительно при автоматическом режиме работы системы управления или при наличии модуля планирования поворотов могут быть определены различные возможные проходы разворота между текущим выполняемым рабочим проходом и следующим рабочим проходом, подлежащим выполнению, и показаны оператору для выбора, например, при индикации разворотов. В этом случае оператор может выбрать один из предлагаемых вариантов или подтвердить запланированный предварительно заданный вариант.
Краткий перечень чертежей
Далее со ссылками на прилагаемые чертежи будут подробно описаны примеры осуществления изобретения, его особенности и преимущества. На чертежах:
фиг.1 схематично изображает систему сельхозмашин и систему управления по изобретению в одном из примеров выполнения,
фиг.2 изображает участок площади, на котором указаны несколько рабочих проходов и несколько проходов разворота,
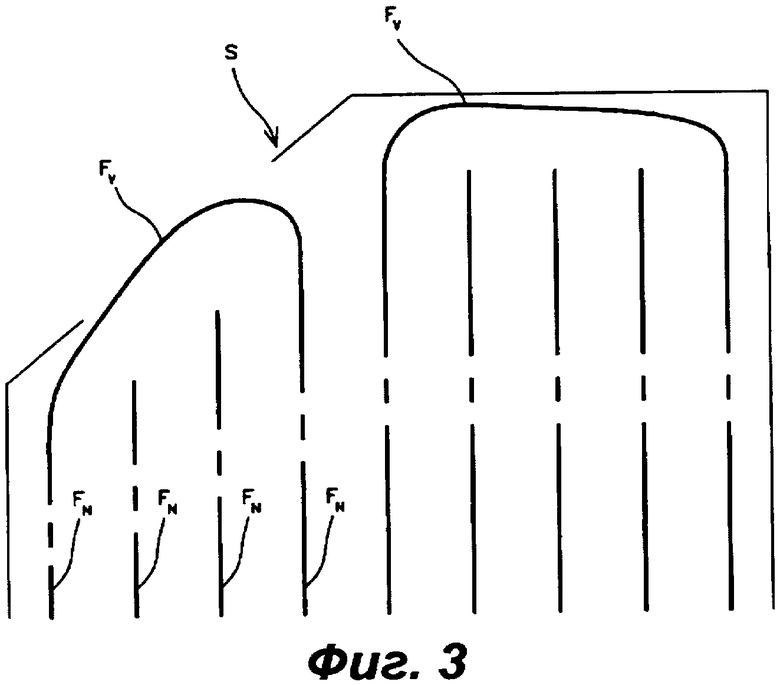
фиг.3 изображает участок площади, на котором указаны несколько рабочих проходов и два различных прохода разворота,
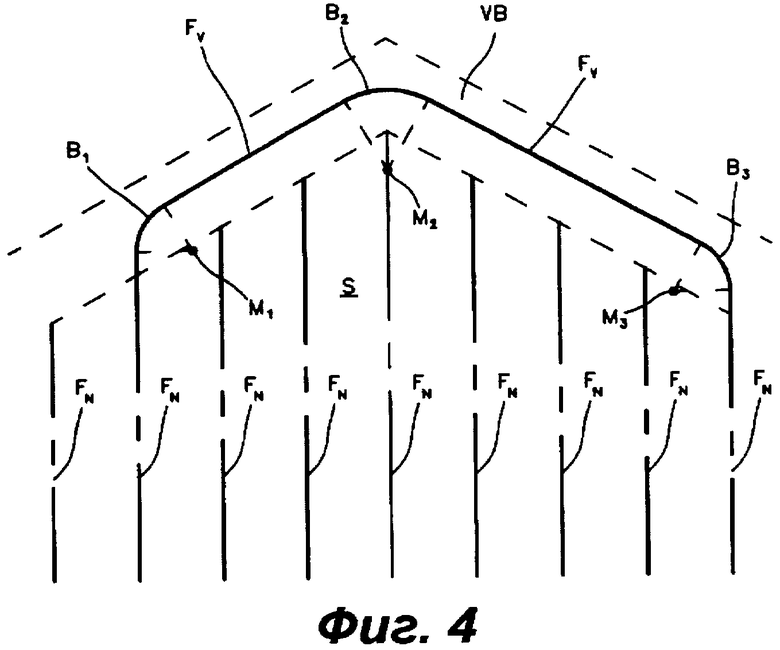
фиг.4 изображает участок площади, на котором указаны несколько рабочих проходов и один проход разворота,
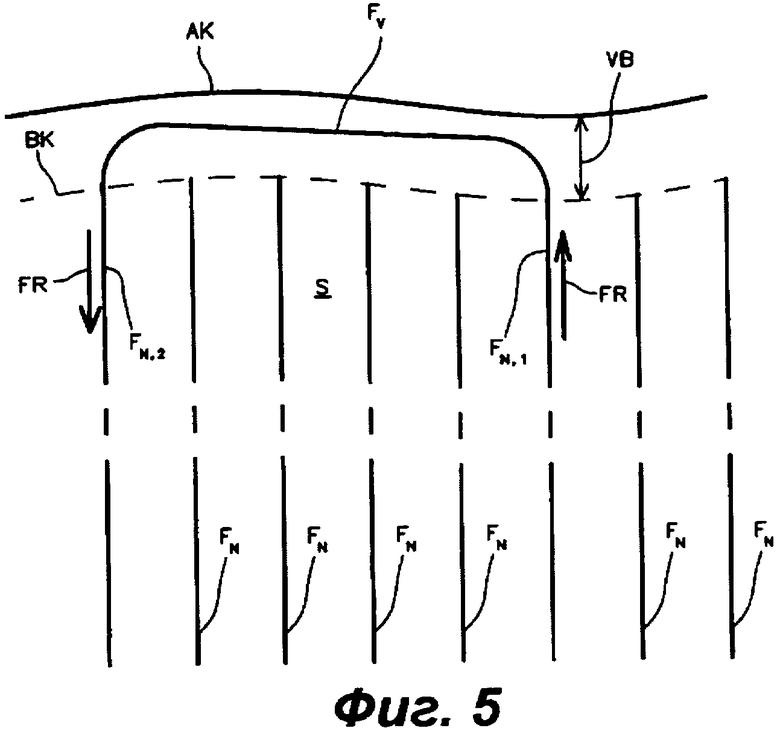
фиг.5 изображает участок площади, на котором указаны несколько рабочих проходов и один проход разворота,
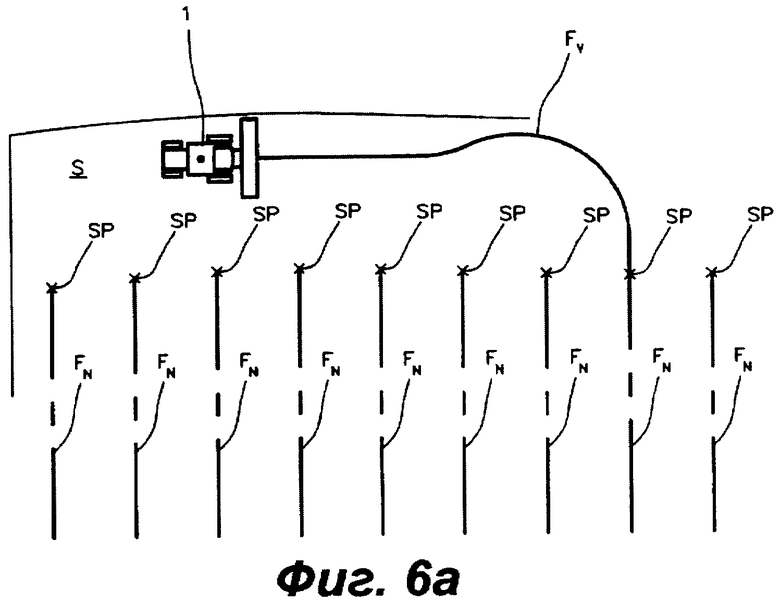
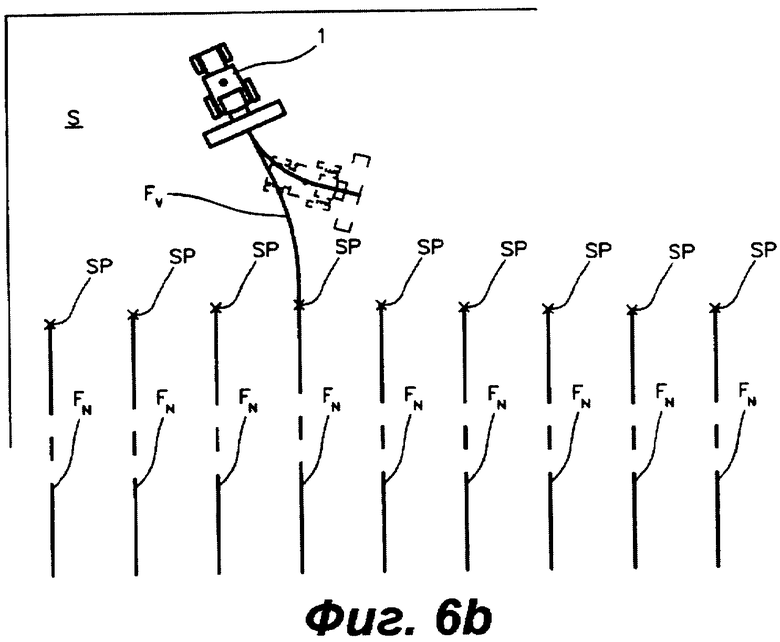
фиг.6а и 6b схематично изображают участок площади, на котором указаны несколько рабочих проходов и два различных варианта прохода разворота для въезда в рабочий проход,
фиг.7 представляет профиль прохода разворота между двумя рабочими проходами и необходимые для этого данные местоположения,
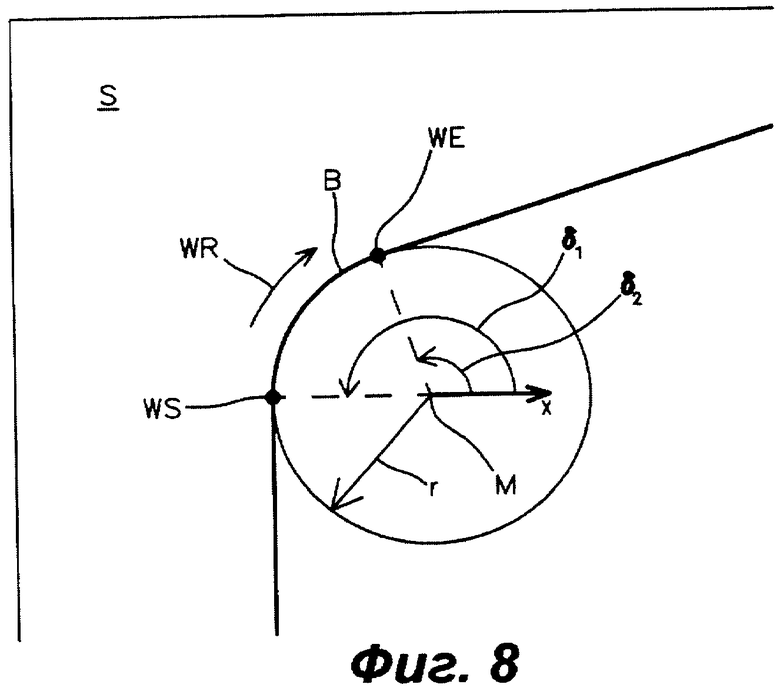
фиг.8 схематично представляет данные местоположения, необходимые для определения дуг поворота,
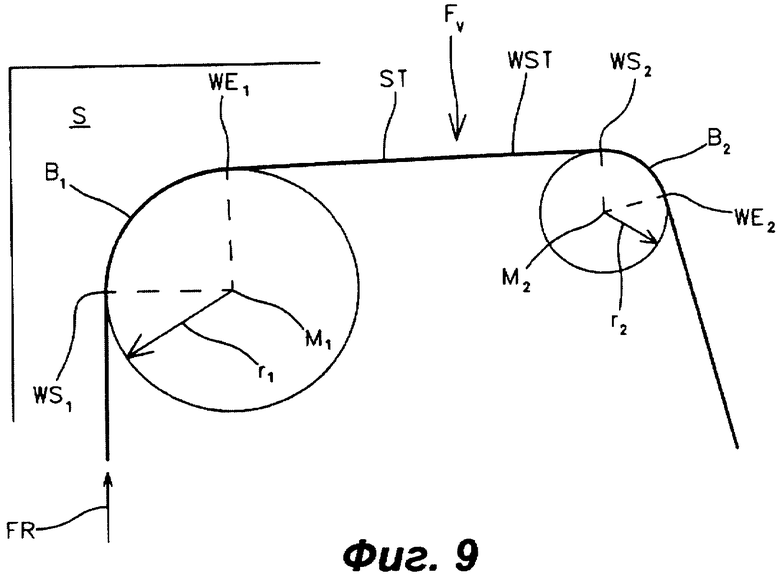
фиг.9 изображает пример прохода разворота без заднего хода для осуществления разворота на 180° с помощью двух дуг поворота,
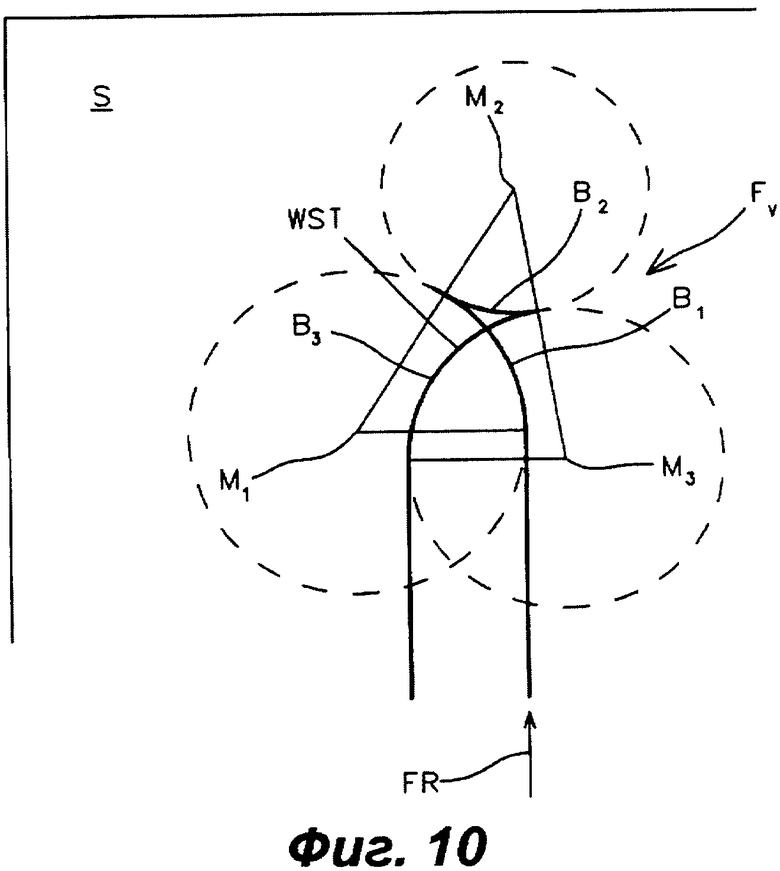
фиг.10 изображает пример прохода разворота для осуществления разворота на 180° с помощью трех дуг поворота с задним ходом.
Осуществление изобретения
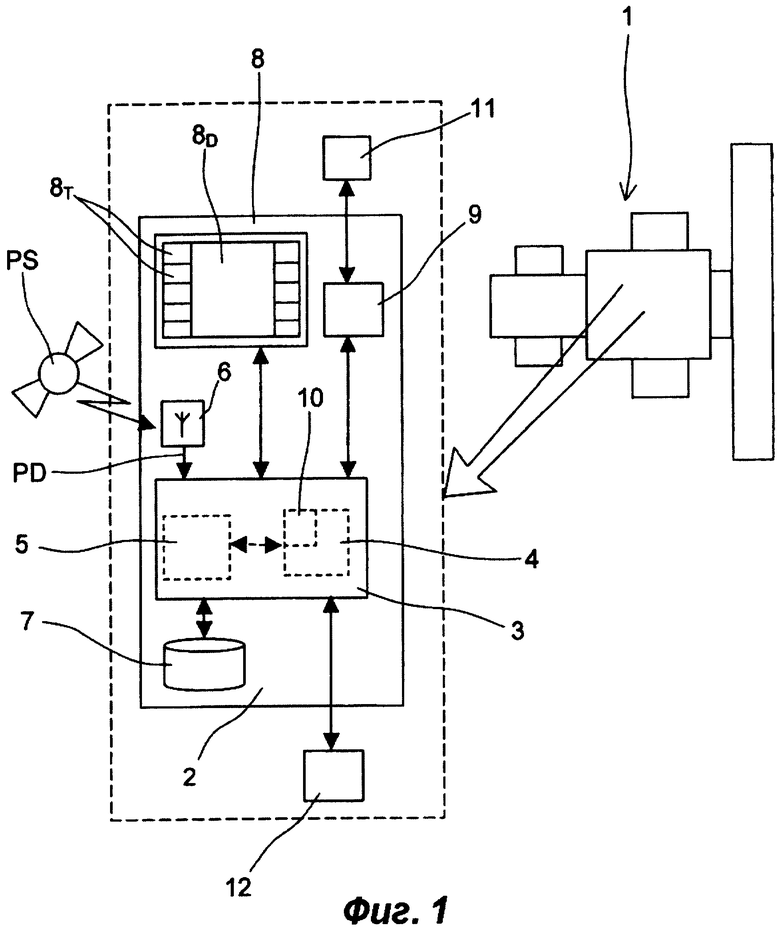
На фиг.1 представлена система сельхозмашин в виде одного зерноуборочного комбайна 1, оснащенного системой 2 управления по изобретению. Конструкция и рабочие процессы такого комбайна 1 хорошо известны специалисту в данной области, как и обычные соответствующие системы управления комбайнами. Поэтому на фиг.1 схематично представлены только компоненты системы 2 управления, существенные для пояснения изобретения.
К существенным компонентам системы 2 управления относится блок 6 определения местоположения, например, приемник системы GPS (Global Positioning System - глобальная система навигации и определения местоположения), который принимает сигналы GPS от соответствующих спутников PS определения местоположения. Предпочтительно здесь имеется в виду приемник системы GPS, который работает в спутниковой системе определения местоположения с корректировкой, например, в дифференциальной системе DGPS или подобной системе (в которой приемник GPS кроме спутниковых сигналов использует поправки, генерируемые опорной станцией, расположенной в фиксированном месте с известными координатами) для наиболее точного определения местоположения, предпочтительно с точностью до нескольких сантиметров.
Кроме того, система 2 управления содержит процессор 3 с заложенными в нем системой 4 маршрутизации и системой 5 управления разворотом на краю поля, реализованными в виде модулей программного обеспечения. Принципиальная схема и действие такой системы маршрутизации известны, например, из патентных документов ЕР 0821296 А1 и ФРГ №102004027242 А2, описания которых включены в данное описание в качестве ссылки.
В соответствии с изобретением система 4 маршрутизации и система 5 управления разворотом работают совместно. При этом компонентом системы 4 маршрутизации является модуль 10 планирования маневров поворота, который может быть реализован, например, в качестве подпрограммы в системе 4 маршрутизации. Модуль 10 планирования маневров поворота отвечает за планирование проходов разворота на краю поля в ходе обработки и в этом отношении работает совместно с системой 5 управления разворотом. Посредством модуля 10 планирования маневров поворота в любое время могут быть актуализированы проходы разворота на краю поля. В качестве примера, последовательности технологических шагов при развороте, первоначально заданные системой 5 управления разворотом или оперативно выработанные с ее помощью, могут быть адаптированы в текущий проход разворота. Для этого система 4 маршрутизации и система 5 управления разворотом получают, среди прочих данных, данные PD действительного местоположения от блока 6 определения местоположения.
Запоминающий блок 7 служит для того, чтобы записывать запланированные маршруты, все рабочие проходы и, при необходимости, также проходы разворота. В этом запоминающем блоке 7 могут быть также заложены заученные или другим образом предварительно заданные последовательности технологических шагов при развороте. Кроме того, в запоминающем блоке 7 могут содержаться все необходимые картографические данные о подлежащей обработке территории, а также необходимые для планирования параметры машин, параметры убираемой растительности или другие данные, требуемые для маршрутизации, направления по рабочим проходам и для системы 5 управления разворотом.
Вместо бортовой системы 4 маршрутизации может также использоваться система маршрутизации, находящаяся в центральном вычислительном устройстве хозяйства. В этом случае готовые маршруты передаются на систему 2 управления комбайна 1. Эти готовые маршруты могут, например, записываться в запоминающий блок 7. В данном случае маршрут предпочтительно представляет собой задание отдельных рабочих проходов с начальной и конечной токами, очередность этих рабочих проходов и, при определенных условиях, уже предварительно спланированные проходы разворота на краю поля. Для обеспечения возможности актуализации рабочего процесса в любой момент система 2 управления предпочтительно снабжена соответствующим модулем 10 планирования маневров поворота. Этот модуль 10, как это было описано выше, служит для актуализации проходов разворота в ходе работы для того, чтобы изменять первоначально заданную очередность рабочих проходов или чтобы обеспечивать возможность отклонения от предварительно заданных маршрутов по каким-либо причинам, например, при наличии непредвиденных препятствий. Альтернативно или дополнительно система машин может также состоять в связи обмена данными с внешней системой маршрутизации, например, посредством радиосвязи.
От процессора 3 могут также управляться модули управления различных рабочих аппаратов 12, таких как гидронасосы, гидравлические клапаны, представленные здесь схематично в виде одного блока. При этом рабочие аппараты 12 управляются, например, посредством команд от системы 5 управления разворотом для обработки последовательности технологических шагов при развороте на краю поля.
Процессор 3 связан также с автоматической системой 9 рулевого управления, так что система 1 машин с помощью этой системы может автоматически выполнять рабочие проходы и проходы разворота на краю поля, предусмотренные системой 4 маршрутизации или модулем 10 планирования маневров поворота. Для этого автоматическая система 9 рулевого управления взаимодействует с обычно имеющимися на системе 1 машин органами 11 управления движением, такими как устройства управления поворотом колес, сцепление, тормоза. В целях упрощения эти органы 11 также представлены в виде одного блока.
Система 2 управления содержит также операторский интерфейс 8, связанный с процессором 3. В данном примере выполнения операторский интерфейс 8 представляет собой сенсорный дисплей с индикаторным полем 8D и расположенными по бокам клавишами 8T. С помощью клавиш 8Т оператор может производить ввод данных или выполнять определенные действия.
Далее рабочий процесс системы 1 машин с системой 2 управления будет описан со ссылками на фиг.2-10.
На фиг.2 показана площадь S, на которой представлены множество рабочих проходов FN и проходы FV,O, FV,U разворота на краю поля, по которым комбайн 1 должен следовать, чтобы перейти от одного рабочего прохода FN к следующему рабочему проходу FN. В данном примере стратегия обработки выбрана таким образом, что комбайн 1 при проходах разворота каждый раз поочередно пропускает три рабочих прохода FN (на фиг.2 верхние проходы FV,O разворота) и два рабочих прохода FN (на фиг.2 нижние проходы FV,U разворота). Таким образом, при движении по запланированному маршруту R комбайн 1 должен поочередно выполнять проходы FV,O, FV,U разворота различной длины при разворотах на краю поля.
На этом примере уже понятно, что для таких целей не особенно хорошо подходит система управления разворотом, при которой различные шаги в пределах одной последовательности технологических шагов при развороте на краю поля следуют друг за другом в жесткой последовательности по времени или в виде фиксированных участков пути. В простейшем случае типовая последовательность технологических шагов при разворотах комбайна 1 на краю поля может состоять в следующем. При выезде с поля, то есть в конце рабочего прохода FN вначале снижают число оборотов мотора, затем поднимают жатвенный аппарат и далее для прохода разворота включают другую передачу. Весь процесс повторяют в обратном порядке перед въездом комбайна в следующий рабочий проход FN. Если бы такая последовательность технологических шагов при развороте была установлена по одному из верхних проходов FV,O разворота, то временной промежуток для нижних проходов FV,U разворота на нижнем краю поля был бы слишком длинным. Это приводило бы к тому, что, например, жатвенный аппарат комбайна 1 еще не был бы опущен при въезде в следующий рабочий проход FN. И наоборот, если бы последовательность технологических шагов при развороте была установлена по одному из нижних проходов FV,U разворота на нижнем краю поля, шаги для верхних проходов FV,O разворота на верхнем краю поля выполнялись бы слишком быстро, то есть, например, жатвенный аппарат опускался бы еще до въезда комбайна в следующий рабочий проход FN. Это могло бы приводить к неблагоприятным ситуациям, вплоть до аварий в области разворота на краю поля.
Для маршрута на площади S по фиг.2 с прямыми кромками эта проблема решается путем того, что для проходов FV,O, FV,U разворота на верхнем и на нижнем краю поля намечаются две различные последовательности технологических шагов при развороте, и оператор в конце рабочего прохода FN выбирает нужную последовательность технологических шагов, нажимая на соответствующую стартовую клавишу.
Однако такое решение неприменимо, когда наружные кромки площади S или занятого растительностью участка проходят не прямолинейно, как это показано на фиг.3 и 4. На этих схемах показано, что при пропуске рабочих проходов FN проходы FV разворота должны иметь различные профили участков пути, чтобы система машин могла переходить в области разворота по краю поля вдоль границы растительности от предыдущего рабочего прохода к последующему.
Поэтому в системе управления по фиг.1 система 5 управления разворотом действует совместно с модулем 10 планирования маневров поворота таким образом, что последовательность технологических шагов при развороте синхронизируется с действительно подлежащим следованию проходом FV разворота независимо от того, какой вид имеет этот проход FV разворота. При этой синхронизации решающим является соблюдение того, чтобы отдельные шаги выполнялись в необходимых рабочих позициях после выезда с рабочего прохода и чтобы процесс выполнялся в обратном порядке своевременно, а не слишком рано, перед въездом в новый рабочий проход. Для этого на основе действительно подлежащего выполнению прохода разворота, то есть в конечном счете в зависимости от действительного местоположения системы машин, а также от начальной точки и направления нового рабочего прохода, вычисляют предполагаемое, имеющееся в распоряжении расстояние и предполагаемое, имеющееся в распоряжении время до въезда в новый рабочий проход и соответствующим образом адаптируют последовательность технологических шагов при развороте, предварительно заданную системой управления разворотом. Эта предварительно заданная последовательность технологических шагов при развороте может быть заучена, как и в обычных системах, например, путем объезда в режиме обучения с выполнением маневров поворота. Однако в принципе возможно эту последовательность технологических шагов при развороте предварительно задать вручную, например предварительно спланировать в центральном вычислительном устройстве хозяйства и затем передать на систему управления разворотом.
При выполнении прохода разворота периодически проверяют действительное местоположение системы машин и таким образом подсчитывают дальность остального пути до въезда в следующий рабочий проход и остаток имеющегося в распоряжении времени. При существенном отклонении от плановых данных система управления разворотом оперативно модифицирует последовательность технологических шагов при развороте таким образом, чтобы выполнение отдельных технологических шагов по возможности вновь было синхронизировано с текущим проходом. Для этого при необходимости в пределах последовательности технологических шагов отдельные шаги могут поменяться местами или даже быть по возможности пропущены.
Для обеспечения возможности гибко реагировать на все события система 2 управления может, как это было описано выше, в любой момент перепланировать маршрут R. В особенности это относится к перемене очередности рабочих проходов FN. В этом случае должны быть соответствующим образом спланированы новые проходы FV разворота для выполнения рабочих проходов FN в желаемом порядке. Как показано на фиг.5, для этого необходимо, чтобы системе 2 управления, то есть модулю 10 планирования маневров поворота, была известна область VB разворота. Эта область VB разворота для уборочной машины определена, например, наружной кромкой АК площади S и кромкой ВК растительности. Данные для этой области VB разворота заложены, например, в карте в запоминающем блоке 7. Другой информацией, необходимой для определения области VB разворота, являются данные о препятствиях, таких как телеграфные столбы или изгороди, предварительно заданные огороженные площади, а также зоны безопасности, в которых, например, не разрешено автоматическое вождение. Такими зонами безопасности могут быть области вблизи проезжих дорог, а также те области, где, например, из-за слишком густого леса нет надежности в приеме сигналов GPS и поэтому система определения местоположения не может работать с достаточной надежностью и точностью. Как будет подробно описано далее, на основе этих данных может быть определен проход FV разворота, позволяющий выполнить безопасный проход в направлении FR движения от уже сделанного, «старого» рабочего прохода FN,1 к следующему, «новому» рабочему проходу FN,2.
При планировании прохода FV разворота особенно необходимо обеспечить, чтобы система машин правильным образом входила в предстоящий рабочий проход FN, то есть, например, не входила в него косо. Для этого в зависимости от диаметра поворота системы машин для въезда в новый рабочий проход FN может быть выбрана несколько более расходная траектория прохода FV разворота. В качестве примера на фиг.6а и 6b представлены два возможных варианта въезда в рабочий проход FN под правильным углом. Показаны участок площади S и часть рабочих проходов FN. Кроме того, маркированы начальные точки SP отдельных рабочих проходов FN. Для того чтобы система 1 машин правильно вошла в соответствующий рабочий проход FN, она должна прибыть в начальную точку SP с правильной ориентацией.
На фиг.6а показана возможность обеспечения выбора такого прохода FV разворота, что система 1 машин своевременно перед начальной точкой SP рабочего прохода FN, в который она должна войти, делает заезд, то есть проходит по дуге увеличенного радиуса поворота.
На фиг.6b показан другой вариант. Здесь проход FV разворота выбран таким образом, что система 1 машин вначале проезжает вдоль области разворота в направлении движения параллельно кромке растительности мимо начальной точки SP соответствующего рабочего прохода FN и затем дает задний ход по дуге, чтобы занять подходящее положение для въезда в рабочий проход FN.
Выбор варианта зависит, как правило, от свободного пространства в области разворота. Предпочтительно оператору системы машин каждый раз предлагается предпочтительный, оптимальный маршрут, а оператор может его подтвердить или выбрать альтернативный вариант, который кажется ему более подходящим. Далее система управления разворотом, как это было пописано выше, адаптирует последовательность технологических шагов при развороте к подтвержденному или выбранному проходу разворота.
Из схем по фиг.7-10 видно, какие параметры требуются для определения прохода FV разворота. Здесь система машин должна пройти от предыдущего рабочего прохода FN,1 к следующему рабочему проходу FN,2 и правильно войти в него. Рабочие проходы FN,1, FN,2 представлены здесь в укороченном виде. В качестве данных для планирования этих рабочих проходов FN,1, FN,2 системе машин необходимы только данные начальных точек SP, конечных точек ЕР и направления FR движения системы машин. При этом из направления FR движения понятно, какая точка рабочего прохода FN,1, FN,2 является начальной точкой SP и какая - конечной точкой ЕР. Таким образом, эта характеристика является обратимой. Если известно направление FR движения, системе управления нужны лишь координаты точек.
Далее суммарный проход FV разворота составляется из участков L1, L2 выезда и въезда, на которых система 1 машин движется прямолинейно от конечной точки ЕР старого рабочего прохода FN,1 или подходит к начальной точке SP нового рабочего прохода FN,2, чтобы прямо выйти из поля или прямо войти в новый рабочий проход FN,2. В зависимости от системы машин эти участки L1, L2 выезда и въезда могут быть различными по длине. К этим участкам L1, L2 выезда и въезда примыкает собственно участок WST прохода разворота, на котором изменяется ориентация системы машин. Решающими параметрами для определения этого участка WST прохода разворота являются начальная точка WSS участка и его конечная точка WSE. При этом, как было описано выше, их очередность определяется направлением FR движения.
Участок WST прохода разворота как таковой может быть определен посредством отдельных дуг поворота. Одна такая дуга В поворота представлена на фиг.8 и может быть определена следующими параметрами. С одной стороны, это центр М кривизны дуги и радиус r поворота. С другой стороны, необходима еще длина дуги, то есть следует определить, какой угловой сегмент образует данная дуга В, для определения начальной точки WS и конечной точки WE разворота. В примере выполнения по фиг.8 это осуществляется путем задания двух углов δ1, δ2, причем первый угол δ1 является углом между вектором х, нормальным к направлению движения до точки WS, и вектором от центра М кривизны дуги к начальной точке WS разворота, а второй угол δ2 является углом между нормальным вектором х и вектором от центра М кривизны дуги к конечной точке WE разворота. Таким образом, в данном примере выполнения начальная точка WS и конечная точка WE дуги В определяются полярными координатами, привязанными к центру М кривизны дуги. Однако в принципе возможно определять начальную точку WS и конечную точку WE другими координатами. Кроме того, необходимо установить направление WR движения по дуге, то есть определить, в какую сторону система машин должна проходить по дуге.
На фиг.9 и 10 показано, каким образом с помощью таких дуг В поворота могут быть определены полные участки WST разворота или проходы FV разворота.
На фиг.9 показан простой разворот на 180°, при котором система машин делает разворот за один проход, то есть без заднего хода, таким же образом, как это предусмотрено, например, при развороте по фиг.7. В данном случае должны быть заданы только параметры двух дуг B1, B2 поворота, то есть их центры M1, M2 кривизны и радиусы r1, r2, а также относящиеся к ним начальные точки WS1, WS2 и конечные точки WE1, WE2 дуг поворота. Участок ST пути между дугами B1, В2 поворота, а также участки выезда и въезда в рабочие проходы (не показаны) определяются тем, что известны начальные точки WS1, WS2 дуг и конечные точки WE1, WE2 дуг B1, B2 поворота, конечные точки рабочих проходов и направление FR движения. В этом случае достаточно того, чтобы модуль 10 планирования маневров поворота определил отдельные данные дуг B1, В2 поворота, начальные и конечные точки соответствующих рабочих проходов и направление FR движения и предоставил их в распоряжение автоматической системе рулевого управления.
На фиг.10 показан другой пример, в котором проход FV разворота на 180° с задним ходом определяется с помощью трех дуг B1, В2, В3 поворота с центрами M1, М2, М3 кривизны. В данном примере система машин вначале следует вперед из предыдущего рабочего прохода вдоль первой дуги B1 поворота, затем дает задний ход вдоль дуги В2 поворота и входит по дуге В3 поворота в новый рабочий проход, расположенный непосредственно рядом со старым рабочим проходом. Сравнение этой схемы со схемой по фиг.9 показывает, что для такого разворота требуется значительно меньше места, чем для въезда в новый рабочий проход FN за один проход, то есть без заднего хода. Однако задний ход связан с большими затратами времени, так что каждый раз нужно взвешивать, какие маневры разворота более выгодны.
На примере схемы по фиг.4 можно еще раз убедиться, что с помощью трех дуг B1, В2, В3 поворота можно просто и без проблем определить проходы Fv разворота в областях VB разворота со сложными картографическими данными.
За счет предусмотренной изобретением динамичной актуализации последовательности технологических шагов при развороте в зависимости от конкретного действительного профиля соответствующего прохода разворота отдельные рабочие шаги могут всегда выполняться в синхронизации с проходом разворота. Благодаря этому ручные действия оператора могут быть сведены к минимальному объему. Само собой разумеется, что по соображениям надежности система выполнена таким образом, что оператор может в любой момент наложить приоритетное ручное управление на процесс автоматического управления.
В заключение следует еще раз отметить, что представленные на чертежах системы машин и системы управления, а также описанный в связи с ними конкретный способ являются только примерами осуществления изобретения. Специалисту в данной области понятно, что при осуществлении изобретения возможны различные изменения и модификации в пределах объема защиты. Следует также подчеркнуть, что использование в описании единственного числа применительно к различным признакам не исключает возможности их присутствия во множественном числе.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА МАРШРУТИЗАЦИИ ДЛЯ СИСТЕМ СЕЛЬХОЗМАШИН | 2007 |
|
RU2439835C2 |
| СИСТЕМА МАРШРУТИЗАЦИИ ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХ МАШИН | 2005 |
|
RU2384987C2 |
| Система мониторинга маршрутов движения сельскохозяйственных машин при выполнении полевых работ | 2017 |
|
RU2651420C1 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2006 |
|
RU2339203C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНОЙ | 2005 |
|
RU2384988C2 |
| СИСТЕМА МАРШРУТИЗАЦИИ ДЛЯ СЕЛЬХОЗМАШИН | 2006 |
|
RU2423038C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МАРШРУТА ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2467374C2 |
| СПОСОБ РАЗРАБОТКИ ЗАДАЮЩИХ ЛИНИЙ ДВИЖЕНИЯ ДЛЯ РАБОЧИХ СЕЛЬХОЗМАШИН | 2007 |
|
RU2412580C2 |
| ЭЛЕКТРОННАЯ СИСТЕМА ОБМЕНА ДАННЫМИ | 2005 |
|
RU2451318C2 |
| СИСТЕМА ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ ВЫПОЛНЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХ ПРОЦЕССОВ НА ОСНОВЕ ЭЛЕКТРОННОГО ОБМЕНА ДАННЫМИ | 2005 |
|
RU2553066C2 |


Изобретение относится к способу и системе управления системой сельхозмашин. Способ включает разработку маршрута, содержащего рабочие проходы и проходы разворота на краю поля, автоматическое выполнение последовательности технологических шагов при развороте. Последовательность технологических шагов при развороте динамично актуализируют и осуществляют в зависимости от действительного местоположения системы машин и в зависимости от рабочего прохода. Система содержит блок определения местоположения, систему маршрутизации, систему управления разворотом на краю поля. Технический результат заключается в обеспечении непрерывной синхронизации последовательности технологических шагов. 2 н. и 8 з.п. ф-лы, 11 ил.
1. Способ управления системой (1) сельхозмашин при обработке территории (S), подлежащей обработке, при котором для системы (1) машин вырабатывают маршрут (R), содержащий рабочие проходы (FN), вдоль которых система (1) машин проходит при обработке территории (S), и проходы (FV) разворота на краю поля, вдоль которых система (1) машин проходит от одного рабочего прохода (FN) к следующему подлежащему выполнению рабочему проходу (FN), причем к концу рабочего прохода (FN) и/или в ходе движения по следующему за ним проходу (FV) разворота и/или к началу последующего рабочего прохода (FN) система (1) машин автоматически выполняет последовательность технологических шагов при развороте, отличающийся тем, что последовательность технологических шагов при развороте динамично актуализируют и выполняют в зависимости от действительного местоположения системы (1) машин и в зависимости от рабочего прохода (FN), подлежащего последующему выполнению.
2. Способ по п.1, отличающийся тем, что в зависимости от текущего проходимого рабочего прохода (FN), рабочего прохода (FN), подлежащего последующему выполнению, географических данных области (VB) разворота на краю поля и определенных параметров машин системы (1) сельхозмашин проход (FV) разворота между текущим проходимым рабочим проходом (FN) и рабочим проходом (FN), подлежащим последующему выполнению, определяют таким образом, что система (1) машин оптимальным образом входит в рабочий проход (FN), подлежащий последующему выполнению.
3. Способ по п.2, отличающийся тем, что во время выполнения прохода (FV) разворота его динамично актуализируют и выполняют в зависимости от действительного местоположения системы (1) машин.
4. Способ по п.1, отличающийся тем, что при выработке маршрута (R) для системы машин рабочие проходы (FN) и очередность рабочих проходов (FN) выбирают в зависимости от определенных параметров машин и/или в зависимости от профиля возможных проходов (FV) разворота между рабочими проходами.
5. Способ по п.4, отличающийся тем, что при движении вдоль рабочего прохода динамично актуализируют очередность еще не пройденных рабочих проходов (FN), подлежащих обработке.
6. Способ по любому из пп.2-5, отличающийся тем, что параметры машин, которые учитывают при определении рабочих проходов (FN) и/или очередности рабочих проходов (FN) и/или проходов (FV) разворота, включают в себя рабочую ширину захвата и/или круг поворота системы (1) машин.
7. Способ по любому из пп.2-5, отличающийся тем, что проход (FV) разворота между текущим проходимым рабочим проходом (FN) и рабочим проходом (FN), подлежащим последующему выполнению, генерируют при использовании отдельных дуг (В, B1, В2, В3) поворота, определяемых следующими соответствующими параметрами: центр (М, M1, М2, М3) кривизны, радиус (r) поворота, размер (δ1, δ2) дуги, направление (WR) прохода вдоль дуги (В, B1, В2, В3) поворота, данные о примыкающих дугах (B1, B2, В3) поворота.
8. Способ по любому из пп.1-5, отличающийся тем, что систему (1) машин автоматически ведут вдоль прохода (FV) разворота.
9. Способ по любому из пп.1-5, отличающийся тем, что оператору системы (1) машин для движения по проходу (FV) разворота указывают соответствующий проход (FV) разворота на индикаторном устройстве (8D) в режиме указания прохода разворота.
10. Автоматическая система (2) управления системой (1) сельхозмашин на подлежащей обработке территории (S), содержащая блок (6) определения местоположения для автоматического определения данных (PD) действительного местоположения системы (1) машин, систему (4) маршрутизации для выработки для системы (1) машин маршрута (R), содержащего рабочие проходы (FN), вдоль которых система (1) машин проходит при обработке территории (S), и проходы (FV) разворота, вдоль которых система (1) машин проходит от одного рабочего прохода (FN) к следующему подлежащему выполнению рабочему проходу (FN), систему (5) управления разворотом на краю поля, которая управляет системой (1) машин таким образом, что к концу одного рабочего прохода (FN) и/или в ходе движения по следующему за ним проходу (FV) разворота и/или к началу последующего рабочего прохода (FN) системой (1) машин автоматически выполняется последовательность технологических шагов при развороте, причем система (5) управления разворотом на краю поля выполнена с возможностью динамичной актуализации последовательности технологических шагов при развороте и выполнения этой последовательности в зависимости от действительного местоположения системы (1) машин и в зависимости от рабочего прохода (FN), подлежащего последующему выполнению.
| Устройство для упаковки предметовВ плЕНКу | 1979 |
|
SU821296A1 |
| US 5646844 А, 08.07.1997 | |||
| СПОСОБ АВТОВОЖДЕНИЯ СЕЛЬХОЗАГРЕГАТА | 1991 |
|
RU2025924C1 |

