Область техники
Настоящее изобретение относится к устройству для определения маршрута транспортного средства в соответствии с независимым пунктом 1 формулы изобретения.
Уровень техники
Из уровня техники известны так называемые системы маршрутизации, которые кроме записи маршрутов транспортного средства, движущегося по подлежащей обработке территории, предусматривают также автоматическую обработку транспортным средством ранее запрограммированных маршрутов. Так, например, в патентном документе ФРГ №4342171 для процесса обработки почвы с привлечением данных местоположения на основе системы GPS (Global Positioning System - глобальная система навигации и определения местоположения) описана запись участков пути, пройденных почвообрабатывающей машиной на подлежащей обработке территории. Полученные таким образом данные участков пути сельхозмашины далее, в зависимости от выполнения устройства обработки данных на данной сельхозмашине или в центральном вычислительном устройстве, преобразуются в данные маршрутов, которые могут либо указываться непосредственно в режиме онлайн, либо также записываться с возможностью вызова. Недостаток таких систем заключается, прежде всего, в том, что транспортное средство вначале должно обработать определенный маршрут до того, как он появится в записи в запоминающем устройстве и может быть вызван в качестве комплекта базовых данных для разработки маршрутов, подлежащих обработке, или может быть представлен на каких-либо индикаторных устройствах.
В другом патентном документе, США №6236924, раскрыт типовой применяемый способ маршрутизации во взаимосвязи с так называемыми системами автоматического направления по задающим линиям движения. Согласно способу вначале при поддержке программного обеспечения подлежащую обработке территорию выбирают по маркировочным опорным точкам и затем эту выбранную территорию делят на определенные маршруты с учетом различных критериев оптимизации. При таком решении транспортному средству может быть передан предварительно определенный план маршрутов, по которому транспортное средство автоматически направляется по подлежащей обработке территории. В процессе обработки предварительно определенных маршрутов далее, как правило, записывается действительно проходимый маршрут. Такие системы также имеют тот недостаток, что индикация маршрутов ограничена либо предварительно разработанным планом маршрутов, либо маршрутом, действительно пройденным транспортным средством.
Раскрытие изобретения
Задача, на решение которой направлено настоящее изобретение, заключается в устранении указанных недостатков известных решений уровня техники и создании системы индикации для индикации или визуального (графического) представления движения транспортного средства, что предоставляет в распоряжение оператора транспортного средства наряду с известными данными маршрутов дополнительную информацию.
В соответствии с изобретением решение поставленной задачи достигается за счет признаков, изложенных в пунктах 1 и 21 формулы изобретения.
Предложен способ индикации движения транспортного средства, содержащего по меньшей мере одно индикаторное устройство, связанное с устройством управления и обработки данных. Это устройство управления и обработки данных связано, по меньшей мере, с одной системой направления по задающей линии для направления транспортного средства вдоль маршрутов, и выполнено с возможностью воспринимать, по меньшей мере, один характерный параметр ориентации, описывающий ориентацию транспортного средства. Согласно изобретению устройство управления и обработки данных выполнено с возможностью вырабатывать виртуальную линию будущего движения транспортного средства с учетом, по меньшей мере, одного характерного параметра ориентации транспортного средства и визуально представлять эту виртуальную линию будущего движения на индикаторном устройстве.
Благодаря этому оператор транспортного средства получает, по меньшей мере, информацию о том, по какой линии будущего движения транспортное средство будет двигаться при сохранении текущей ориентации транспортного средства с учетом характерных параметров транспортного средства. Это создает для оператора транспортного средства возможность заблаговременно вмешиваться в процесс рулевого управления для того, чтобы целенаправленно производить обработку по определенной линии движения, безопасно объезжать препятствие или переходить к следующей линии движения с относительной точностью и по короткому пути.
Для того чтобы определяемая линия будущего движения относительно адекватно представляла маршрут, который может быть реально выполнен транспортным средством, в соответствии с изобретением предусмотрено, что один или несколько характерных параметров ориентации содержат расстояние между осями или минимальный круг поворота транспортного средства и мгновенный угол поворота. Эта выработанная и предназначенная для индикации линия будущего движения более точно представляет линию будущего движения, реально выполнимую транспортным средством, если в соответствии с предпочтительным примером осуществления один или несколько характерных параметров ориентации содержат расстояние между осями или минимальный круг поворота транспортного средства и комбинацию величины отклонения от курса и скорости движения транспортного средства. Качество будущей линии движения может быть также повышено за счет того, что характерные параметры ориентации дополнительно содержат ориентацию транспортного средства и ориентацию подлежащего выполнению маршрута.
Для того чтобы оператор транспортного средства постоянно информировался об ожидаемых условиях движения транспортного средства и, благодаря этому, мог заблаговременно ввести коррективы или произвести непосредственную корректировку, в предпочтительном примере осуществления представляемую виртуальную линию будущего движения вырабатывают и указывают непрерывно.
Индикация будущего маршрута, которая может быть легко понята оператором и реально представляет ожидаемые движения транспортного средства, достигается за счет того, что в предпочтительном примере осуществления изобретения виртуальная линия будущего движения имеет радиус кривизны, который изменяется в зависимости от угла поворота или отклонения от курса.
В предпочтительном примере индикацию виртуальной линии будущего движения осуществляют таким образом, что на индикаторном устройстве визуально представляется действительное положение транспортного средства, а виртуальная линия будущего движения проходит в виде направляющей линии перед представленным положением транспортного средства в направлении движения транспортного средства. За счет этого оператор транспортного средства получает в распоряжение наглядную и легко понимаемую систему индикации будущего движения транспортного средства.
Особенно эффективное средство направления предоставляется оператору транспортного средства в том случае, когда в соответствии с предпочтительным примером осуществления один или несколько маршрутов системы направления по задающей линии и виртуальная линия будущего движения представляются в виде совместной индикации. Особенное преимущество такого решения состоит в том, что оператор транспортного средства может с помощью индикации выбрать оптимальный путь движения к следующему маршруту обработки и целенаправленно следовать по этому пути. Таким образом, индикация по изобретению оказывает помощь оператору для точного входа в заданный маршрут.
Для улучшения наглядности индикации в предпочтительном примере осуществления может быть предусмотрено, что маршрут, подлежащий выполнению транспортным средством, подразделяют на множество виртуальных опорных точек, и для каждого контурного участка маршрута, лежащего между двумя соседними опорными точками, определяют кривизну и представляют ее на индикаторном устройстве. За счет этого необходимая для оператора транспортного средства информация сводится к тому, повороты какого радиуса должно совершать транспортное средство для того, чтобы точно следовать по задающей линии, предварительно определенной на основе маршрута.
В предпочтительном примере осуществления изобретения индикаторное устройство может быть выполнено таким образом, что может представлять маршрут и/или кривизну контурного участка. За счет этого оператор транспортного средства получает в свое распоряжение вспомогательное средство направления, гибко приспосабливаемое к потребностям оператора. Особенно выразительная и наглядно структурированная индикация достигается в предпочтительном примере осуществления, когда визуально представляемая на индикаторном устройстве кривизна контурного участка маршрута соответствует мгновенному положению транспортного средства на маршруте. В этом случае индикация сводится к представлению мгновенного положения транспортного средства на подлежащем обработке маршруте. Другими словами, мгновенное положение транспортного средства и представляемая кривизна маршрута синхронизированы, что дополнительно повышает информационную плотность индикации.
Дальнейшее улучшение наглядности индикации достигается в предпочтительном примере осуществления, в котором для мгновенного положения транспортного средства на маршруте определена исходная точка, в которой начинается индикация кривизны соответствующего контурного участка, с продолжением в направлении движения транспортного средства.
Для того чтобы однажды определенные данные кривизны маршрутов могли быть использованы в дальнейшем без необходимости повторных вычислений, в предпочтительном примере осуществления предусмотрено, что выработанные (величины) кривизны контурных участков маршрутов записывают в устройстве управления и обработки данных с возможностью редактирования и повторного вызова. В этом отношении для обеспечения высокой гибкости системы индикации выгодно, когда радиусы записанных величин кривизны являются изменяемыми, так что в определенных случаях уже установленные радиусы кривизны маршрутов могут быть частично привлечены для будущих маршрутов и должны быть определены только в областях отклонения.
В соответствии с предпочтительным примером осуществления из выработанных величин кривизны и, по меньшей мере, одного характерного параметра ориентации транспортного средства выводят задающую линию движения транспортного средства. За счет этого достигается сведенная до необходимого минимума индикация, в которой множество данных присутствуют в сжатом виде, так что оператору на индикаторном устройстве представляется только задающая линия движения. Простое техническое преобразование этой структуры индикации достигается путем того, что выработанная задающая линия движения является представляемой на индикаторном устройстве, причем она одновременно накладывается на соответствующий маршрут.
Для того чтобы оператор наряду с задающей линией, которая зависит от кривизны пути и, по меньшей мере, от одного характерного параметра ориентации транспортного средства, получал также информацию об ожидаемых отклонениях движения транспортного средства от этой задающей линии, в предпочтительном примере осуществления предусмотрено, что выработанная задающая линия движения и виртуальная линия будущего движения транспортного средства представляются в виде совместной индикации.
Богатое и в то же время ясно структурированное содержание индикации достигается в предпочтительном примере осуществления, в котором мгновенное положение транспортного средства, выработанная задающая линия движения и виртуальная линия будущего движения транспортного средства представляются совместно таким образом, что задающая линия движения и виртуальная линия будущего движения транспортного средства в направлении движения транспортного средства привязаны к мгновенному положению транспортного средства в виде криволинейных участков.
В предпочтительном примере осуществления изобретения длина представляемых криволинейных участков, задающей линии, виртуальной линии будущего движения и кривизны контурных участков маршрутов является выбираемой. За счет этого оператору транспортного средства предоставляется в распоряжение индикация высокой гибкости и индивидуальной приспособляемости к потребностям оператора.
За счет того, что на индикаторном устройстве дополнительно представляется линия возможного движения в зависимости от минимального возможного круга поворота, для оператора создается еще одно вспомогательное средство направления, с помощью которого он может лучше предварительно определять ближайший достижимый маршрут или наиболее короткий путь движения.
Конструктивно простое средство осуществления способа по изобретению достигается, когда транспортное средство содержит индикаторное устройство, связанное с устройством управления и обработки данных, причем устройство управления и обработки данных связано, по меньшей мере, с системой направления по задающей линии для направления транспортного средства вдоль маршрутов, при этом устройство управления и обработки данных с учетом, по меньшей мере, одного характерного параметра ориентации транспортного средства вырабатывает виртуальную линию будущего движения транспортного средства и/или задающую линию движения транспортного средства и/или кривизну маршрута и представляет их на индикаторном устройстве.
Дальнейшие предпочтительные примеры осуществления защищены в зависимых пунктах.
Краткий перечень чертежей
Далее со ссылками на прилагаемые чертежи будут подробно описаны примеры осуществления изобретения. На чертежах:
фиг.1 схематично изображает трактор и систему направления по задающей линии движения,
фиг.2 схематично изображает индикаторное устройство трактора по фиг.1,
фиг.3 изображает структуру представления на индикаторном устройстве по фиг.2,
фиг.4 изображает другое подробное представление на индикаторном устройстве по фиг.2.
Осуществление изобретения
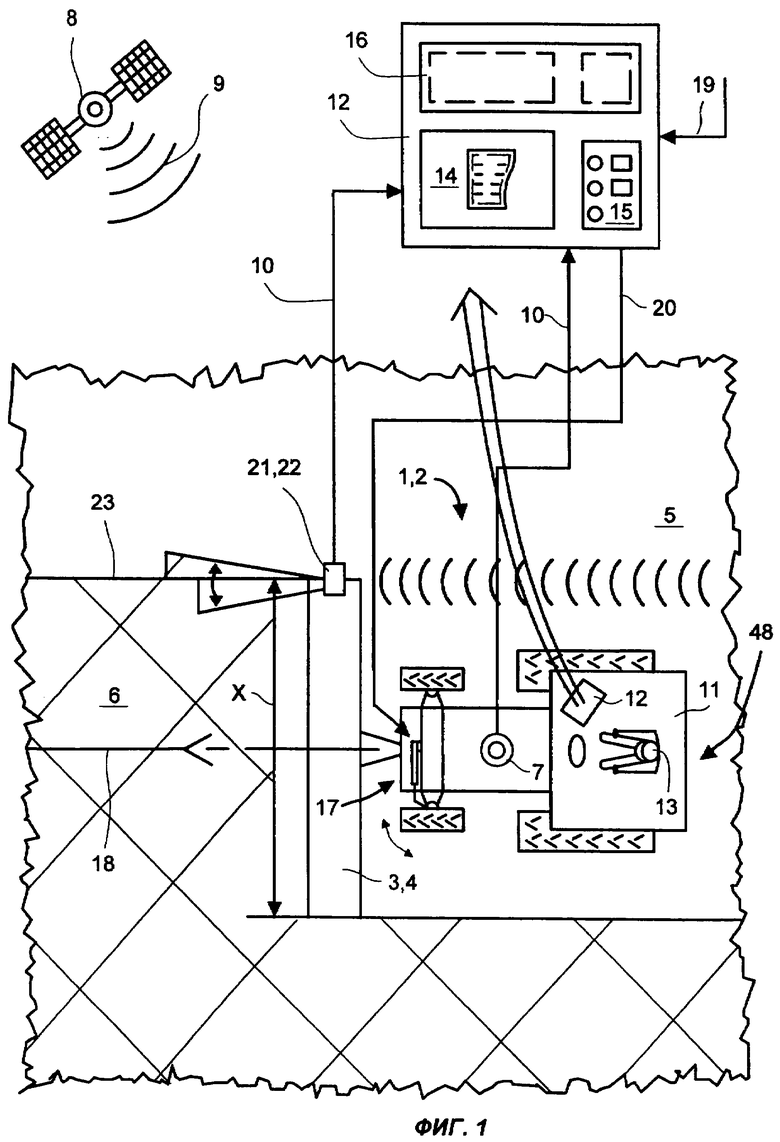
На фиг.1 представлено транспортное средство 1, выполненное в виде трактора 2 с передним навесным оборудованием 4 в виде аппарата 3 косилки для обработки растительности 6 на подлежащей обработке территории 5. Трактор оснащен устройством 7 системы GPS определения местоположения, которое само по себе известно и получает сигналы 9 местоположения от так называемых спутников 8 системы GPS. По этим сигналам устройство 7 определения местоположения вырабатывает сигналы 10 местоположения трактора 2. Кроме того, в кабине 11 трактора 2 расположено устройство 12 управления и обработки данных в зоне доступа для оператора 13. Как показано на фиг.1 в увеличенном схематическом виде, устройство 12 управления и обработки данных содержит, по меньшей мере, индикаторное устройство 14, блок 15 ввода и программирующий модуль 16. Трактор 2 оснащен также системой 17 рулевого управления, которая может управляться автоматически, так что трактор 2 может автоматически двигаться на подлежащей обработке территории 5 по предварительно определенным маршрутам 18.
В простейшем случае это автоматическое направление транспортного средства 1 может осуществляться посредством того, что в устройстве 12 управления и обработки данных заложены подлежащие выполнению маршруты 18, причем их выработка осуществляется либо внешними средствами, либо в самом устройстве 12 управления и обработки данных. При внешней выработке внешние сигналы 19 маршрутов обычно передаются путем передачи данных на устройство 12 управления и обработки данных. Далее с учетом сигналов 10 местоположения трактора 2, генерируемых устройством 7 системы GPS определения местоположения, в устройстве 12 управления и обработки данных вырабатываются так называемые сигналы 20 рулевого управления, которые передаются на систему 17 рулевого управления. Таким образом, транспортное средство 1 может автоматически направляться по определенному маршруту 18 на подлежащей обработке территории 5, при этом такие системы обычно называют в общем виде системами 48 направления по задающей линии. В рамках изобретения возможен вариант осуществления, при котором сигналы 10 местоположения транспортного средства 1 на подлежащей обработке территории 5 могут генерироваться также оптоэлектронными устройствами 21 определения местоположения, такими как лазерный сканер 22, детектирующий кромку 23 растительности. В рамках изобретения предусмотрено также, что транспортное средство 1, представленное в виде трактора 2, может быть также любой сельхозмашиной, такой как зерноуборочный комбайн, или любым транспортным средством не сельскохозяйственного назначения, таким как строительная машина.
На фиг.2 схематично показано транспортное средство 1 в виде трактора 2 и в увеличенном виде представлено индикаторное устройство 14. В левой части чертежа показано шасси 24 трактора 2 с управляемыми передними колесами 26 передней ходовой оси 25 и неуправляемыми задними колесами 28 задней ходовой оси 27. Известным и не описываемым подробно образом с рулевым колесом 29 трактора 2 и/или с управляемыми передними колесами 26 связан датчик 30 угла поворота для определения угла 31 поворота. Воспринимаемые сигналы Z угла поворота передаются на программирующий модуль 16 устройства 12 управления и обработки данных и одновременно в соответствии с изобретением образуют один из характерных параметров 32 ориентации транспортного средства 1. Кроме того, известна геометрия трактора 2, в частности такие данные как расстояние 33 между осями, максимальный допустимый угол поворота колес и связанный с ним минимальный круг 34 поворота. Эти данные заложены в программирующем модуле 16 устройства 12 управления и обработки данных в качестве компонентов характерного параметра 32 ориентации. В том случае, если транспортное средство 1 не оснащено датчиками 30 угла поворота, в рамках изобретения возможен вариант определения ориентации транспортного средства 1 путем определения так называемого отклонения от курса и соответствующей скорости vG транспортного средства 1. В другом варианте осуществления изобретения, как это будет подробно описано далее, может быть предусмотрено, что характерные параметры 32 ориентации могут включать в себя ориентацию 35 транспортного средства 1 и ориентацию 36 подлежащего выполнению маршрута 18, которые также передаются на устройство 12 управления и обработки данных.
В соответствии с изобретением далее в программирующем модуле 16 по имеющимся характерным параметрам 32 ориентации транспортного средства 1 определяется виртуальная линия 37 будущего движения. При этом на основе известных математических зависимостей учитываются либо все описанные выше характерные параметры 32 ориентации, либо выборка из них. В качестве примера простой по математической структуре модели эта виртуальная линия 37 будущего движения может быть определена только на основе угла 31 поворота и геометрии 33 транспортного средства. Выявленная форма этой виртуальной линии 37 будущего движения тем точнее передает реальные соотношения, чем больше характерных параметров 32 ориентации учтено при ее определении. Так, например, при учете также наименьшего возможного круга 34 поворота транспортного средства 1 можно избежать риска, что программирующий модуль 16 создаст виртуальные линии 37 будущего движения, которые транспортное средство 1 не сможет выполнить по конструктивным техническим причинам. В примере осуществления по фиг.2 выработанные линии 37 будущего движения транспортного средства 1 представляются визуально таким образом, что на индикаторном устройстве 14 появляется изображение транспортного средства 1 в виде трактора 2, а перед ним по направлению FR движения изображается выработанная виртуальная линия 37 будущего движения. Таким образом, оператору 13 трактора 2 незамедлительно указывается, по какой линии 37 движения двигался бы трактор при сохранении текущих характерных параметров 32 ориентации.
Программирующий модуль 16 устройства 12 управления и обработки данных может быть выполнен таким образом, что непрерывно определяет виртуальную линию 37 будущего движения в зависимости от характерных параметров 32 ориентации, то есть непрерывно актуализирует и представляет ее форму. В простейшем случае индикация виртуальной линии 37 будущего движения производится таким образом, что она показывается в виде направляющей линии 38 с радиусом кривизны R1, определенным из характерных параметров 32 ориентации. При этом радиус кривизны R1 в основном зависит от угла 31 поворота или от так называемого отклонения от курса. Оперативная индикация оператору 13 транспортного средства 1 достигается в том случае, когда виртуальная линия 37 будущего движения изображается в виде направляющей линии 38 перед трактором 2 по направлению FR движения и в простейшем случае расположена по центру, так что направляющая линия 38 постоянно опережает транспортное средство 1.
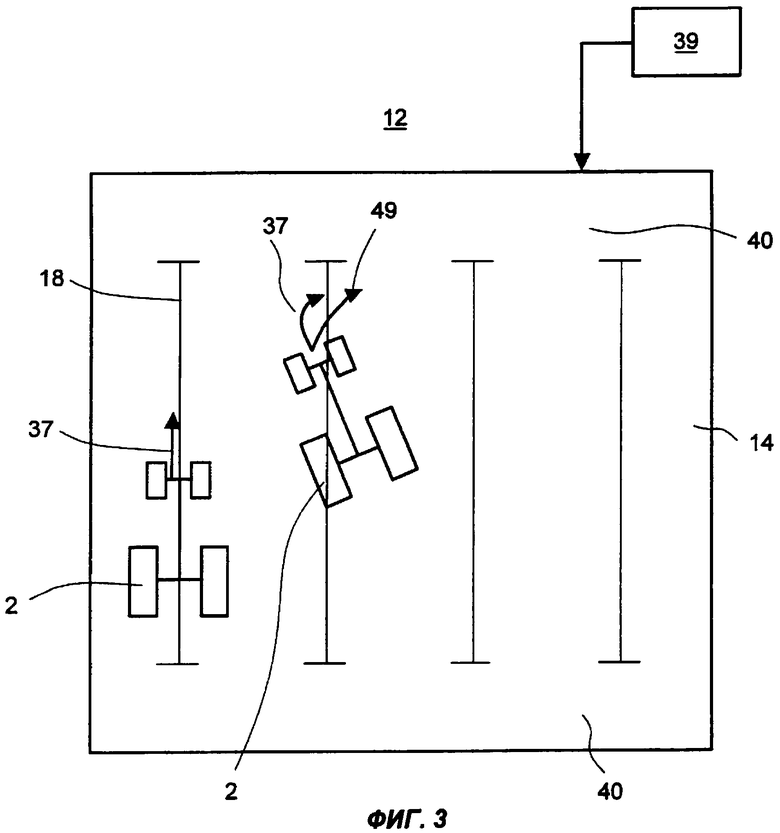
На фиг.3 в целях упрощения представлено только индикаторное устройство 14 устройства 12 управления и обработки данных. На индикаторном устройстве 14 прежде всего представляется множество маршрутов 18, которые были предварительно определены системой 39 маршрутизации, либо встроенной в устройство 12 управления и обработки данных, либо отдельной от него. Маршруты могут быть прямолинейными и параллельными друг другу, как это показано на схеме, однако они могут быть также криволинейными и проходить не параллельно друг другу. Далее на индикаторном устройстве 14 представлены два различных мгновенных положения трактора 2, причем перед каждым изображением трактора в соответствии с изобретением представлена виртуальная линия 37 будущего движения. На левом изображении виртуальная линия 37 будущего движения проходит примерно параллельно предварительно определенному маршруту 18. На другом изображении трактор 2 движется поперечно предварительно определенному маршруту 18, причем перед ним также показана виртуальная линия 37 будущего движения, выработанная из характерных параметров 32 ориентации. При индикации, структурированной таким образом, оператор 13 может незамедлительно распознать отклонение между предварительно определенным маршрутом 18 и виртуальной линией 37 будущего движения и с помощью соответствующих маневров рулевого управления направить транспортное средство 1 таким образом, чтобы при небольшом объеме рулевых маневров вернуться на предварительно определенный маршрут 18.
Применительно к сельскохозяйственным целям использования такой принцип индикации оказывает оператору рабочей сельхозмашины особенно большую помощь, когда транспортное средство 1 находится в области 40 разворотов на краю поля и движется к следующему предварительно определенному маршруту 18, подлежащему выполнению. В этом случае оператор 13 может использовать саму индикацию непосредственно для помощи в направлении. Эта помощь особенно эффективна в том случае, когда на индикаторном устройстве 14 представляется не только виртуальная линия 37 будущего движения, но также и линия 49 движения при минимальном возможном круге 34 поворота. С ее помощью оператор 13 транспортного средства 1 может еще более эффективно использовать маневренность транспортного средства 1 при направлении к следующему маршруту 18. Индикация линии 49 движения при минимальном возможном круге 34 поворота имеет особенное значение в области 40 разворотов на краю поля, поскольку оператор 13 получает в свое распоряжение средство для оценки, какой следующий подлежащий обработке маршрут 18 является вообще достижимым для транспортного средства 1 по его техническим условиям или возможностям.
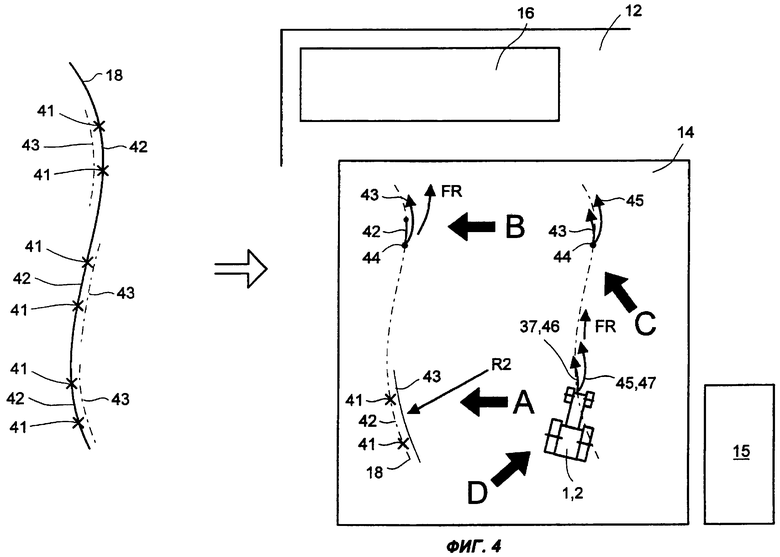
На фиг.4 показан следующий пример структуры индикации виртуальной линии 37 будущего движения в соответствии с изобретением. Вначале вырабатывается контурный криволинейный маршрут 18. Этот маршрут 18 может быть математически представлен таким образом, что вначале он разбивается на участки посредством множества опорных точек 41, а затем контурный участок 42 между двумя соседними опорными точками определяется мгновенной кривизной 43 маршрута 18 на данном участке. Определение этих величин кривизны 43 тем точнее описывает общую линию маршрута 18, чем больше опорных точек 41 и, соответственно, контурных участков 42 привлекают к разметке предварительно определенного маршрута 18. При этом создается возможность представить предварительно определенный маршрут 18 в таком виде, что на индикаторном устройстве 14 устройства 12 управления и обработки данных наряду с действительным контуром маршрута 18 или вместо него для каждого контурного участка 42 может представляться его кривизна 43. Особенно наглядная структурированная визуальная индикация обеспечивается в том случае, когда представляемая на индикаторном устройстве 14 кривизна 43 контурного участка 42 маршрута 18 соответствует мгновенному положению транспортного средства 1 на маршруте 18 (представление А на фиг.4).
Наглядность индикации может быть улучшена за счет того, что для мгновенного положения транспортного средства 1 на маршруте 18 на индикаторном устройстве 14 определена исходная точка 44, в которой начинается индикация кривизны 43 данного контурного участка 42, продолжающейся в направлении FR движения транспортного средства 1 (представление В на фиг.34). Высокая гибкость в использовании устройства 12 управления и обработки данных по изобретению достигается в том случае, когда установленные величины кривизны 43 участков маршрутов 18 заложены в устройстве 12 управления и обработки данных, в частности, в программирующем модуле 16 с возможностью редактирования и вызова. При этом однажды определенные величины кривизны 43 могут использоваться при представлении параллельных маршрутов 18 одного и того же контура без необходимости повторного разделения маршрута на контурные участки 42 и вычисления величин их кривизны 43.
Гибкость системы может быть повышена также за счет того, что, например, с помощью блока 15 ввода могут быть отредактированы ранее определенные и заложенные радиусы R2 кривизны маршрутов 18. При этом оператор 13 транспортного средства 1 имеет возможность изменить линию маршрута 18 путем непосредственного ввода радиусов R2 кривизны. Таким образом, на основании определяемой кривизны 43 контурного участка 42 предварительно определенного маршрута 18 с учетом виртуальной линии 37 будущего движения, выработанной из выборки параметров или всего комплекса характерных параметров 32 ориентации, получают в результате задающую линию 45 движения (представление С на фиг.4), в которой учтены не только характерные параметры маршрутов, но также и характерные параметры транспортного средства. За счет этого транспортное средство 1 может более точно производить обработку по выработанной задающей линии 45 движения, поскольку она лучше скоординирована с техническими возможностями транспортного средства. В этом отношении еще лучшая наглядность достигается в том случае, когда при индикации вновь выработанной задающей линии 45 движения одновременно она накладывается на изображение предварительно определенного маршрута 18.
Согласно представлению D на фиг.4 в другом предпочтительном примере индикации на индикаторном устройстве 14 могут показываться совместно как задающая линия 45 движения, выработанная на основе характерных параметров 32 ориентации, так и виртуальная линия 37 будущего движения, также выработанная с учетом характерных параметров 32 ориентации. Здесь также в особенно эффективном примере индикации совместно представляются мгновенное положение транспортного средства 1, выработанная задающая линия 45 движения и виртуальная линия 37 будущего движения транспортного средства 1, при этом задающая линия 45 движения и виртуальная линия 37 будущего движения транспортного средства 1 представлены в виде криволинейных участков 46, 47, проходящих в направлении FR движения перед мгновенным положением транспортного средства 1. Кроме того, представление криволинейных участков 46, 47 и кривизны 43 маршрута может иметь различную длину представления на индикаторном устройстве 14. Это изменение длины представления может достигаться путем того, что длина задается с помощью блока 15 ввода, при этом возможен вариант зависимости длины представления от скорости движения. В этом случае длина может, например, соответствовать участку пути, который транспортное средство 1 проходит за определенный промежуток времени, - например, за следующие десять секунд.
Специалисту в данной области понятно, что при осуществлении изобретения возможны различные изменения и модификации способа и устройства, не выходящие за пределы объема защиты, а также использование его в других примерах применения для получения описанных преимуществ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА МАРШРУТИЗАЦИИ ДЛЯ СИСТЕМ СЕЛЬХОЗМАШИН | 2007 |
|
RU2439835C2 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ СЕЛЬХОЗМАШИН И АВТОМАТИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2424642C2 |
| СПОСОБ РАЗРАБОТКИ ЗАДАЮЩИХ ЛИНИЙ ДВИЖЕНИЯ ДЛЯ РАБОЧИХ СЕЛЬХОЗМАШИН | 2007 |
|
RU2412580C2 |
| СИСТЕМА МАРШРУТИЗАЦИИ ДЛЯ СЕЛЬХОЗМАШИН | 2006 |
|
RU2423038C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ НАЗЕМНЫМ ДВИЖЕНИЕМ МОБИЛЬНЫХ ОБЪЕКТОВ НА АЭРОДРОМЕ | 2014 |
|
RU2560220C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНОЙ | 2005 |
|
RU2384988C2 |
| Способ и устройство для управления движением на аэродроме | 2015 |
|
RU2634502C2 |
| СИСТЕМА МАРШРУТИЗАЦИИ ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХ МАШИН | 2005 |
|
RU2384987C2 |
| СИСТЕМА УПРАВЛЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2486738C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ РАБОЧАЯ МАШИНА И СПОСОБ ОПЕРЕЖАЮЩЕГО РЕГУЛИРОВАНИЯ ПРИВОДНОЙ МОЩНОСТИ И/ИЛИ ПРИВОДНОЙ ТРАНСМИССИИ | 2015 |
|
RU2684233C2 |
Изобретение относится к устройству для определения маршрута транспортного средства. Техническим результатом является возможность оптимизировать маршрут транспортного средства на основании физических параметров его ориентации и движения, а также обеспечение более точного и гладкого следования по маршруту. Устройство для определения маршрута транспортного средства содержит индикаторное устройство, устройство управления и обработки данных, систему направления по задающей линии для направления транспортного средства вдоль маршрутов. При этом устройство управления и обработки данных выполнено с возможностью восприятия характерного параметра ориентации. Система направления по задающей линии выполнена с возможностью определения линии будущего движения транспортного средства, в частности, радиуса кривизны линии будущего движения в зависимости от характерного параметра ориентации, а также с возможностью записи определенного таким образом радиуса кривизны линии движения транспортного средства в устройстве управления и обработки данных с возможностью редактирования и повторного вызова. Индикаторное устройство выполнено с возможностью индикации линии будущего движения транспортного средства и/или задающей линии движения транспортного средства. 5 з.п. ф-лы, 4 ил.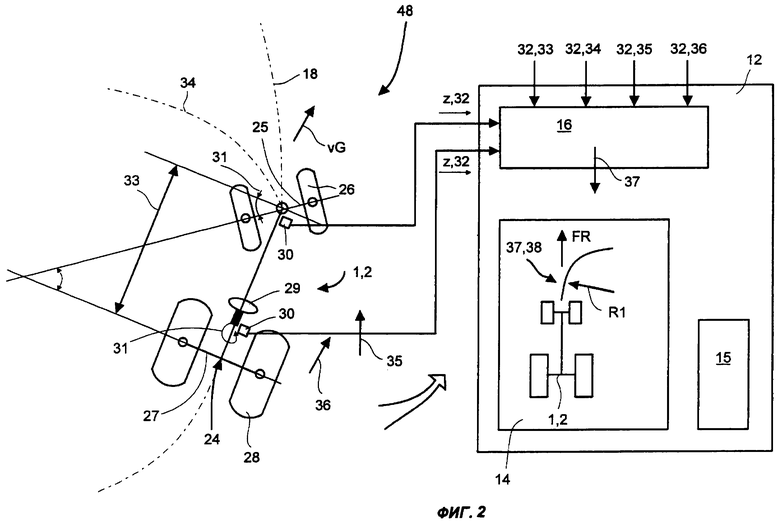
1. Устройство для определения маршрута транспортного средства, содержащее по меньшей мере одно индикаторное устройство, устройство управления и обработки данных, связанное с указанным по меньшей мере одним индикаторным устройством; по меньшей мере одну систему направления по задающей линии для направления транспортного средства вдоль маршрутов, связанную с указанным устройством управления и обработки данных, при этом устройство управления и обработки данных выполнено с возможностью восприятия по меньшей мере одного характерного параметра ориентации, описывающего ориентацию транспортного средства, по меньшей мере одна система направления по задающей линии выполнена с возможностью определения линии будущего движения транспортного средства, в частности радиуса кривизны линии будущего движения в зависимости от по меньшей мере одного характерного параметра ориентации, а также с возможностью записи определенного таким образом радиуса кривизны линии движения транспортного средства в устройстве управления и обработки данных с возможностью редактирования и повторного вызова; а по меньшей мере одно индикаторное устройство выполнено с возможностью индикации линии будущего движения транспортного средства и/или задающей линии движения транспортного средства.
2. Устройство по п.1, отличающееся тем, что по меньшей мере один характерный параметр ориентации выбран из расстояния (33) между осями или минимального круга поворота транспортного средства и мгновенного угла (31) поворота.
3. Устройство по п.1, отличающееся тем, что по меньшей мере один характерный параметр ориентации выбран из расстояния между осями или минимального круга поворота транспортного средства и комбинации величины отклонения от курса и скорости движения транспортного средства.
4. Устройство по п.1, отличающееся тем, что по меньшей мере одно индикаторное устройство выполнено с возможностью непрерывной индикации линии будущего движения.
5. Устройство по п.1, отличающееся тем, что по меньшей мере одно индикаторное устройство выполнено с возможностью визуального представления действительного положения транспортного средства, таким образом, что линия будущего движения проходит в виде направляющей линии перед представленным положением транспортного средства в направлении движения транспортного средства.
6. Устройство по п.1, отличающееся тем, что по меньшей мере одно индикаторное устройство выполнено с возможностью совместного визуального представления одного или нескольких возможных маршрутов и линии будущего движения.
| US 6876920 B1, 05.04.2005 | |||
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Уплотнение вращающегося вала | 1983 |
|
SU1065642A1 |
| US 6128574 A, 03.10.2000 | |||
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ НА ПЕРЕКРЕСТКЕ В НАВИГАЦИОННОЙ СИСТЕМЕ | 2003 |
|
RU2271516C2 |

