Область техники
Настоящее изобретение относится к способу маршрутизации для группы систем сельхозмашин на подлежащей обработке территории. Кроме того, изобретение относится к системе маршрутизации для выработки соответствующего плана маршрутов и к способу управления группой систем сельхозмашин при обработке территории, подлежащей обработке, с использованием выработанного совместного плана маршрутов.
Уровень техники
В последние годы вслед за постоянным ростом производительности систем сельхозмашин, то есть рабочих машин, таких как зерноуборочные комбайны или полевые измельчители, тракторов с различным навесным оборудованием, таким как разбрасыватели удобрений, сеялки, опрыскиватели, сеноворошилки, валкователи, все большее значение получает планирование рабочего процесса. В особенности при уборке урожая для выполнения отдельных рабочих этапов часто по погодным условиям может оказаться в распоряжении только ограниченный промежуток времени, который зачастую используется не оптимальным образом из-за отсутствия планирования использования машин. Кроме того, точное планирование использования важно для того, чтобы реализовать на практике максимальную теоретически возможную производительность машин. Для достижения этой цели оптимального проведения рабочего процесса были разработаны так называемые системы и способы маршрутизации, с помощью которых для соответствующей системы машин определяется оптимальный маршрут при обработке определенной территории, например определенной делянки или площади. Данная система машин в зависимости от ее оснащения может направляться вдоль этого маршрута с автоматическим, полуавтоматическим или просто ручным управлением. Обычно такие системы маршрутизации и автоматические системы рулевого управления работают со спутниковыми навигационными системами, например, с помощью приемников системы GPS (Global Positioning System - глобальная система навигации и определения местоположения). Для повышения точности существуют различные способы корректировки, такие как, например, предназначенная для способа GPS дифференциальная система DGPS (в которой приемник GPS кроме спутниковых сигналов использует поправки, генерируемые опорной станцией, расположенной в фиксированном месте с известными координатами).
Система маршрутизации описана, например, в патентном документе ЕР 0821296 А2. В данном решении при объезде периметра поля записывают координаты периметра с помощью прибора GPS, а также вводят другие характерные параметры машин, в особенности рабочую ширину захвата. Затем с помощью электронного устройства обработки данных генерируют определенный алгоритм расчета пути движения при обработке в виде маршрута обработки в цифровой форме, при этом учитывают определенный критерий оптимизации маршрута обработки. Типовые критерии оптимизации могут состоять в том, чтобы сократить до минимума вспомогательные проезды, такие как участки движения для разворотов на краю поля, проезды для опорожнения бункера зерноуборочного комбайна и т.д. Другой критерий оптимизации может заключаться в том, чтобы по возможности сократить время на обработку определенной площади, при этом можно допустить несколько более длинные участки движения, которые однако могут быть пройдены быстрее, так как не требуют изменения направления. Оптимизация может проводиться также и в отношении нескольких различных критериев для достижения оптимального компромисса между самыми различными условиями оптимизации.
В большинстве случаев сельскохозяйственные площади обрабатываются несколькими системами машин, то есть целой группой систем сельхозмашин, которые могут быть задействованы в технологической цепочке процесса одна за другой. Так например, вслед за сеялками могут работать системы машин для опрыскивания и внесения удобрений. Системы машин могут также работать параллельно, как например, в том случае, когда несколько зерноуборочных комбайнов в составе одного комплекса производят уборку на обширной территории. В принципе эти различные системы машин, если они оснащены соответствующими системами маршрутизации и автоматизации, могут сами вычислять для себя идеальный маршрут и затем производить обработку при движении по нему.
Однако для этого в первую очередь требуется, чтобы каждая система машин определила, по меньшей мере, внешний контур подлежащей обработке территории, например, путем однократного объезда. Такой объезд занимает относительно много времени. Согласно описаниям в патентных документах ЕР 0821296 В1 и ФРГ №102004027242 А1 уже существует возможность того, что маршруты, полностью разработанные одной системой маршрутизации, могут повторно использоваться для других целей использования. Однако это возможно лишь в том случае, когда речь идет об одинаковых системах машин или, по меньшей мере, о системах машин с такими же или очень сходными рабочими параметрами, такими как рабочая ширина захвата, радиус поворота и другие параметры.
Кроме того, возникают проблемы, когда несколько машин работают одновременно на одной, как правило большой территории. Здесь при движении по маршрутам водитель каждой машины должен следить за тем, чтобы не столкнуться или не пересечься с другой системой машин, например, из-за пересечения маршрутов. При определенных условиях требуются непроизводительные простои, чтобы избежать риска столкновения, или создаются очереди у источников, которые совместно используются системами машин. Так например, при использовании нескольких зерноуборочных комбайнов такая очередь может создаться у транспортного средства для опорожнения зернового бункера. К тому же применительно к большим территориям получение необходимых задающих линий или дополнительных географических данных маршрутизации, а также составление полного плана маршрутов требует больших затрат времени.
Раскрытие изобретения
Соответственно, задача настоящего изобретения заключается в создании улучшенного способа маршрутизации для группы систем сельхозмашин и соответствующей системы маршрутизации, которые обеспечивают устранение указанных проблем.
В соответствии с изобретением решение поставленной задачи достигается, с одной стороны, за счет способа по пункту 1 формулы изобретения и, с другой стороны, за счет системы маршрутизации по пункту 12 формулы изобретения.
Согласно способу по изобретению отдельные системы сельхозмашин оснащены собственными блоками выработки данных маршрутизации и состоят в связи обмена данными друг с другом. Далее на основе получаемых путем обмена данных маршрутизации вырабатывается совместный план маршрутов. В качестве данных маршрутизации, получаемых путем обмена, могут служить обычные задающие данные, например задающие линии, такие как границы площади, указатели пути, препятствия и другие. Однако ими могут быть также уже объезженные или запланированные собственные (оптимизированные) частичные маршруты, эксплуатационные данные, такие как вид эксплуатации, и данные полевой культуры, то есть свойства обрабатываемой культуры и их влияние на конкретную систему машин, а также параметры машин, такие как рабочая ширина захвата, радиус поворота и другие.
В соответствии со способом по изобретению посредством взаимодействия систем машин может быть очень быстро и экономично выработан план маршрутов для всей общей территории. Далее совместный план маршрутов предоставляется в распоряжение для всех задействованных систем машин и предпочтительно также для других систем машин для дальнейшего использования.
Для построения системы маршрутизации по изобретению, предназначенной для осуществления способа по изобретению, различные системы сельхозмашин должны содержать следующие компоненты:
блоки определения местоположения, предназначенные для определения действительного местоположения соответствующей системы машин,
блоки выработки данных маршрутизации для предоставления необходимых данных маршрутизации, например, путем автоматического определения данных местоположения, а также другой дополнительной информации и/или путем ввода оператором,
блоки связи для передачи данных маршрутизации.
Кроме того, необходим, по меньшей мере, один блок маршрутизации, который для приема данных маршрутизации связан с приемником для того, чтобы на основе принимаемых данных маршрутизации вырабатывать совместный план маршрутов для соответствующей территории.
При этом предпочтительно отдельные системы сельхозмашин содержат собственные блоки маршрутизации и могут принимать и обрабатывать данные маршрутизации других систем машин. Затем совместный план маршрутов может быть скоординирован блоками маршрутизации систем машин на основе данных маршрутизации, получаемых путем обмена данными. Для этого каждая система сельхозмашин должна содержать связанный с блоком маршрутизации блок координации, который воздействует на блок маршрутизации таким образом, что совместный план маршрутов вырабатывается в координации с блоками маршрутизации других систем машин внутри группы этих систем машин на основе данных маршрутизации, получаемых путем обмена данными.
В принципе отдельные системы машин могут также вначале передавать все свои данные маршрутизации на центральный блок маршрутизации, который затем вырабатывает совместный план маршрутов. В качестве центрального блока маршрутизации может предпочтительно служить также блок маршрутизации на одной из систем машин, которая в этом случае принимает на себя функцию выполнения маршрутизации в качестве «мастер-машины».
Предпочтительно способ совместной маршрутизации по изобретению используется в рамках способа управления группой систем сельхозмашин при обработке территории, подлежащей обработке. При этом совместный план маршрутов содержит предназначенные для отдельных систем машин оптимизированные маршруты для обработки территории. Далее движение системы машин вдоль соответствующего маршрута может осуществляться известным образом с автоматическим, полуавтоматическим или ручным управлением, как это будет подробно пояснено ниже.
Для осуществления такого способа управления блоки маршрутизации и связанные с ним блоки координации систем сельхозмашин должны быть предпочтительно выполнены таким образом, что совместный план маршрутов содержит предназначенные для отдельных систем машин оптимизированные маршруты для обработки территории. Кроме того, в этом случае отдельные системы машин, кроме уже названных выше компонентов, предпочтительно должны содержать блоки управления движением (системы автоматического рулевого управления) и/или индикаторные блоки для вождения системы машин вдоль маршрута, в зависимости от того, производится ли управление автоматическим, полуавтоматическим или ручным образом.
За счет объединения в сеть различных систем маршрутизации и постоянного обмена данными создается возможность индивидуального определения оптимальных маршрутов для отдельных систем машин, причем в стратегии оптимизации учитываются маршруты других транспортных средств. Другими словами, оптимизация уже не сосредоточивается изолированно на одном транспортном средстве, а надлежащим образом учитывает все сопутствующие обстоятельства, в особенности на предыдущих и последующих этапах процесса в системах машин, которые параллельно обрабатывают ту же самую территорию. Совместный рабочий процесс может быть оптимизирован таким образом, чтобы эффективно устранять опасность столкновения или пересечения параллельно работающих транспортных средств или непроизводительные простои у совместно используемых источников.
При этом для связи между системами машин могут использоваться любые двусторонние системы коммуникации и известные приемопередаточные устройства, в частности радиосистемы, используемые в радиотелефонах. В качестве примера возможно также использование сетей мобильных телефонов или подобных систем.
В зависимых пунктах формулы изобретения и дальнейшем описании приведены предпочтительные примеры осуществления и решения по дальнейшему развитию изобретения. При этом устройство управления, система сельхозмашин и система управления по изобретению могут быть также модифицированы в соответствии с зависимыми пунктами формулы.
Как уже было указано выше, данные маршрутизации предпочтительно содержат географические задающие данные, такие как, например, различные задающие линии, представляющие кромки периметра площади, или положения препятствий и т.д. Эти данные предпочтительно определяют с помощью систем машин.
Для записи задающей линии имеются различные возможности. Так например, в одном варианте водитель может при объезде задающего участка пути с помощью операторского интерфейса вначале задать начальную точку и затем, по достижении конца задающего участка пути, задать конечную точку записи. При этом в качестве задающего участка пути может быть принята просто прямая линия между начальной и конечной точками. Такой подход возможен в том случае, когда, например, дело касается прямой кромки площади или линии внутри площади, вдоль которой площадь должна быть подразделена на участки. Однако может быть также реализован «контурный режим», при котором между начальной и конечной точками задающего участка пути периодически определяются и записываются координаты местоположения транспортного средства. Таким путем определяется точный контур проходимого задающего участка, который может использоваться в качестве задающей линии. Альтернативный вариант состоит в том, что предварительно задается только начальная точка, а затем производится проезд на определенную длину участка пути.
Как уже было описано, задающая линия может представлять один отдельный участок пути, например только одну кромку площади. Однако задающая линия может быть образована также несколькими составляющими участками пути, причем эти отдельные участки могут рассматриваться также и как отдельные задающие линии.
В принципе возможен рабочий процесс, при котором первая и вторая системы машин обрабатывают территорию последовательно по времени друг за другом. В данном случае речь идет о системах машин в технологической цепочке способа, например о работе сеялки и опрыскивателя или о работе косилки и последующей работе сеноворошилки и валкователя. Однако предпочтительно способ используется также в том случае, когда первая и вторая системы машин обрабатывают территорию, по меньшей мере, частично параллельно, как это осуществляется, например, машинами одного комплекса, обрабатывающими параллельно более обширную территорию. При этом отдельные системы машин могут быть одинаковыми, например, это могут быть несколько зерноуборочных комбайнов или несколько полевых измельчителей одного типа.
В особенности в том случае, когда несколько машин одновременно или только частично со смещением по времени обрабатывают территорию совместно, передача всей информации и, прежде всего, задающих линий должна производиться динамично во все время работы. Другими словами, как только одна из систем машин определяет новую задающую линию, она должна незамедлительно передаваться на другие системы машин. При этом передача может производиться системой машин автоматически и/или быть выполнена оператором данной системы машин. Однако возможно также блокировать или задержать передачу или прием новых задающих данных.
В рамках способа по изобретению выгодным образом обеспечивается возможность того, что системы машин, в особенности при начале параллельной работы, производят объезд части необходимого задающего участка пути и передают эти данные друг другу с тем, чтобы как можно скорее получить все требуемые задающие данные. Так, например, одна система машин может объезжать правую и верхнюю кромки площади, в то время как другая система машин объезжает левую и нижнюю кромки.
Далее подлежащая обработке территория, определенная задающими данными, может быть, например, подразделена на участки на основе данных маршрутизации. Это решение особенно подходит для одновременной обработки площади несколькими системами машин в составе одного комплекса или в том случае, когда площадь имеет очень нерегулярную форму.
В этих случаях каждой системой машин может также определяться частичный план маршрутов для определенного участка подлежащей обработке территории. Преимущество решения состоит в том, что каждый из блоков маршрутизации на «собственном» участке может относительно свободно оптимизировать маршрут для данной системы машин без учета других систем машин. Тогда более точная координация планов маршрутов требуется только в пограничных областях участков и в областях разворотов совместного пользования, а также на путях к источникам общего использования и от них.
В особенно предпочтительном примере осуществления данные действительного местоположения отдельных систем определяют неоднократно, то есть непрерывно или с определенными интервалами, и передают их на другие системы машин. Особенное преимущество создается при параллельной работе нескольких машин на одной территории. В этом случае всем системам машин известно, где находятся они сами и где находятся другие системы машин. За счет предварительного задания дистанций безопасности и аварийного выключения при нарушении дистанции безопасности надежно предотвращается риск столкновений.
В особенно предпочтительном решении по развитию способа план маршрутов динамично изменяют, когда к группе присоединяется новая система машин или система машин выбывает из группы. При этом обеспечивается возможность в любой момент присоединить к группе новую систему машин или исключить какую-либо систему машин из группы, например, из-за неполадки или если она нужна в другом месте. Когда присоединяется новая система машин, она должна только вступить в связь обмена данными с другими системами машин и «известить» о себе в группе тем путем, что она передает свои уже имеющиеся данные маршрутизации. В простейшем случае ими являются данные собственного местоположения, собственные параметры машины и информация о том, что данная система машин должна принять участие в рабочем процессе. После этого она получает от других систем машин их данные маршрутизации, к которым относится уже имеющийся план маршрутов. Далее системы машин могут в координации изменить совместный план маршрутов, чтобы оптимальным образом включить присоединившуюся систему машин. Подобным же образом план маршрутов может быть изменен при «извещении об убытии» системы машин в группе.
В особенно предпочтительном примере осуществления для оператора системы машин с помощью индикаторного блока при необходимости представляется общая карта, составленная на основе полученных путем обмена географических задающих данных, действительное местоположение и оптимальный маршрут соответствующей системы машин, а также действительные местоположения других систем машин группы, находящихся на подлежащей обработке территории. За счет этого во время рабочего процесса все операторы всегда имеют в распоряжении общий обзор реально происходящего процесса. При этом в особенно предпочтительном примере осуществления операторам указываются не только их собственный маршрут, но также маршруты других систем машин группы, находящихся на подлежащей обработке территории. В этом случае операторы могут еще раз проверить, действительно ли, по их оценке, маршруты проходят оптимально или, либо в определенных местах, либо вследствие ошибочного планирования, могут создаваться опасность столкновений или ненужные простои. Кроме маршрутов и местоположений может указываться также дополнительная информация, такая как указатели пути, уже обработанные полосы движения, препятствия, запрещенные для проезда участки и другие данные.
В принципе различные системы машин могут работать в различных системах координат и производить перевод передаваемых координат. Однако в предпочтительном примере осуществления системы машин работают в одной системе координат с точно определенной нулевой точкой. При этом предпочтительно используется локальная система координат, нулевая точка которой, например угол подлежащей обработке территории, определена спутниковой навигационной системой, например, в виде местоположения GPS с широтой, долготой и высотой. Эта «нулевая точка» одинакова для всех систем машин.
Как уже кратко объяснялось выше, вождение систем машин по оптимизированным маршрутам может осуществляться полностью автоматически при условии их оснащения блоками управления движением, то есть автоматическими системами рулевого управления. Однако в этом случае по соображениям техники безопасности имеется в любой момент возможность приоритетного вмешательства оператора в управление, то есть отключить эту автоматическую систему рулевого управления путем привода в действие соответствующего органа, такого как тормоз, руль, сцепление. Возможны также варианты полуавтоматического или ручного управления, при которых водителю на индикаторном блоке указываются его маршрут, то есть определенная полоса движения, а также его действительное местоположение и, при необходимости, другие вспомогательные данные, такие как угловое отклонение, так что водитель с их помощью может удерживать транспортное средство на предварительно заданной полосе движения.
Предпочтительно на основе данных маршрутизации различных систем машин определяются также зоны безопасности, предназначенные для различных машин или отнесенные к ним. В этих зонах безопасности автоматическое управление соответствующей системы машин ограничивается, а в особенных случаях полностью отключается. Типичными зонами безопасности являются области вблизи проезжих дорог или те области, где, например, из-за близости леса кроме всего прочего нет надежности в приеме сигналов местоположения.
В одном из предпочтительных вариантов на основе первоначально определенной задающей линии определяют производную от нее задающую линию. Так, например, из первоначально полученных задающих линий, соответствующих кромкам площади, создают смещенные задающие линии в качестве опорных линий, которые определяют полосы движения для отдельных систем машин. При этом предпочтительно может быть предусмотрен постоянный шаг смещения производных задающих линий. Для этого необходимо только, чтобы была известна рабочая ширина захвата машин, которые будут пользоваться задающими линиями. Решение целесообразно прежде всего в тех случаях, когда несколько систем машин работают параллельно на одном поле.
Кроме того, производные задающие линии могут определяться также для назначения проходов для последующих систем машин в технологической цепочке процесса обработки. Так, например, предпочтительно при использовании системы машин для засева могут быть установлены так называемые «проходы опрыскивания» и одновременно выработаны подходящие задающие линии для этих проходов опрыскивания, которые в дальнейшем представляются в распоряжение полевого опрыскивателя.
За счет использования таких производных задающих линий для определения проходов создается также особенная возможность оптимизации различных рабочих этапов в пределах одной технологической цепочки оптимизировать таким образом, чтобы системы машин не использовали в точности одни и те же колеи движения, чтобы не вызывать чрезмерного уплотнения почвы на полосах движения.
Согласно одному из уже упомянутых предпочтительных вариантов одна определенная рабочая машина работает в качестве «мастер-машины», а другие - в качестве «клиентских машин». В особенно предпочтительном варианте эти функции могут быть в любое время установлены оператором системы машин или оператором, имеющим на это специальные полномочия. В данном случае предпочтительно координация и маршрутизация осуществляются системой маршрутизации «мастер-машины». Эта «мастер-машина» получает, например, данные маршрутизации «клиентских машин» и в свою очередь при маршрутизации распределяет частичные задания между «клиентскими машинами» для оптимального использования вычислительных мощностей. Так, например, эта «мастер-машина» на основе полученных от отдельных систем машин данных маршрутизации, то есть в особенности данных местоположения, рабочих параметров машин и определенных ими задающих данных, может подразделять площадь обработки на участки и предназначать их для различных «клиентских машин». При этом подразделение площади на участки и их отнесение или предназначение для отдельных «клиентских машин» может производиться с учетом параметров машин таким образом, что, например, для машины с большей производительностью предназначается больший участок, а для машины с меньшей производительностью - соответственно меньший участок. Далее отдельные «клиентские машины» могут в пределах своих участков самостоятельно планировать свои маршруты и передавать эти запланированные маршруты обратно на «мастер-машину». Затем в ее блоке маршрутизации или координации проверяется, проходят ли эти маршруты координированным образом или создаются проблематичные пересечения. В частности, «мастер-машина» может также предварительно задавать пограничные условия для планирования маршрутов «клиентскими машинами» в пределах их участков для того, чтобы уже установить оптимальную координацию и предотвращать столкновения и периоды ожидания.
Краткий перечень чертежей
Далее со ссылками на прилагаемые чертежи будут подробно описаны примеры осуществления изобретения, его особенности и преимущества. На чертежах:
фиг.1 схематично изображает две системы машин, оснащенные устройствами управления по изобретению,
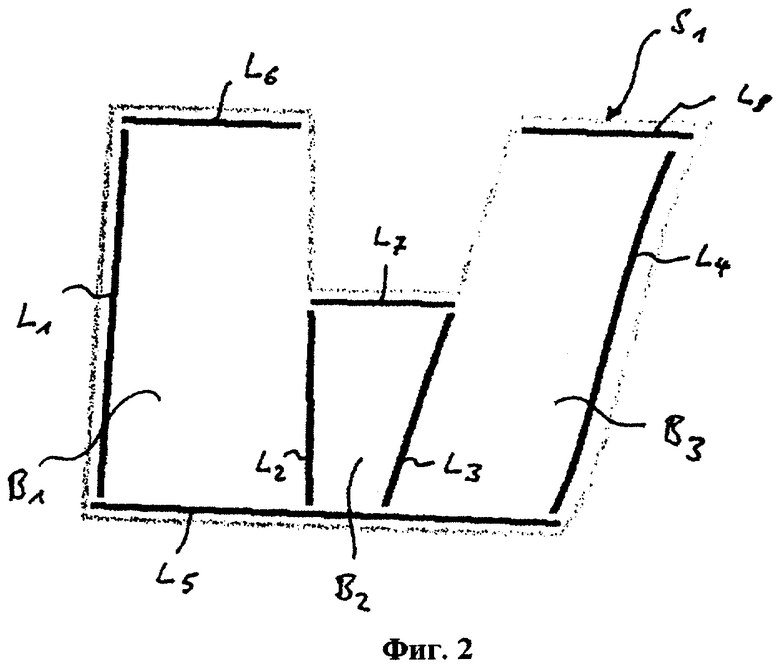
фиг.2 изображает возможные задающие линии для территории с многоугольным контуром периметра,
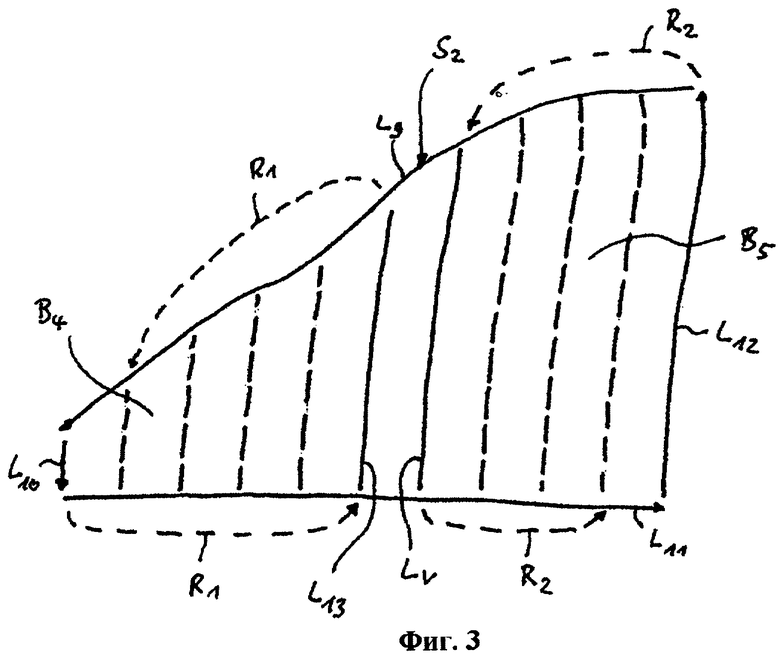
фиг.3 изображает территорию, подлежащую обработке двумя рабочими машинами и разделенную на полосы движения,
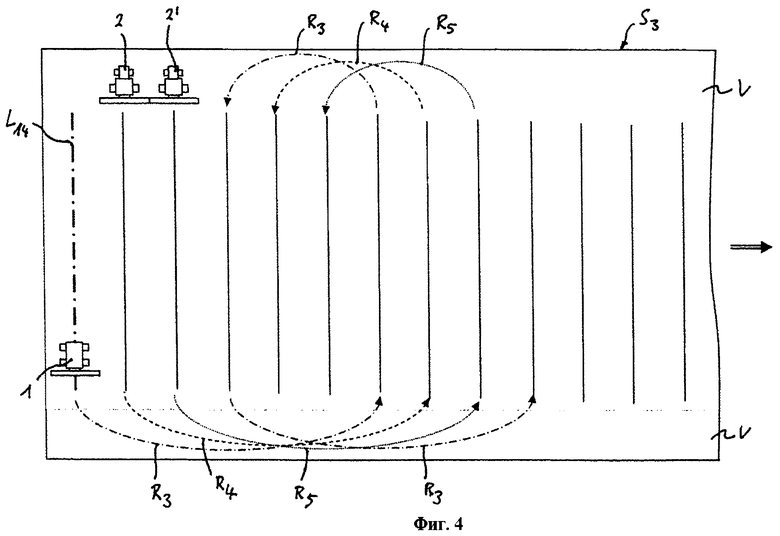
фиг.4 изображает территорию, подлежащую обработке рабочим комплексом с тремя системами машин, в соответствии с планом маршрутов согласно первому примеру осуществления изобретения,
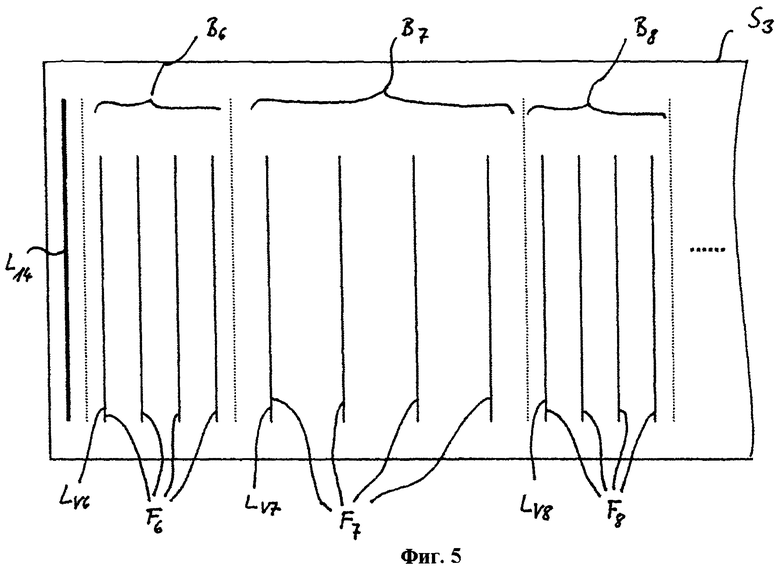
фиг.5 изображает территорию по фиг.4, подлежащую обработке рабочим комплексом с тремя системами машин, в соответствии с планом маршрутов согласно второму примеру осуществления,
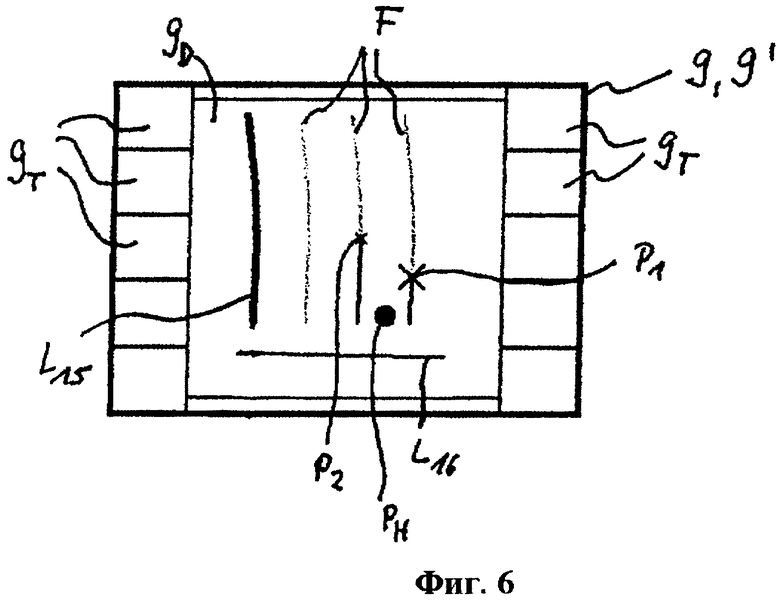
фиг.6 изображает индикаторный блок с представленной на нем картой поля,
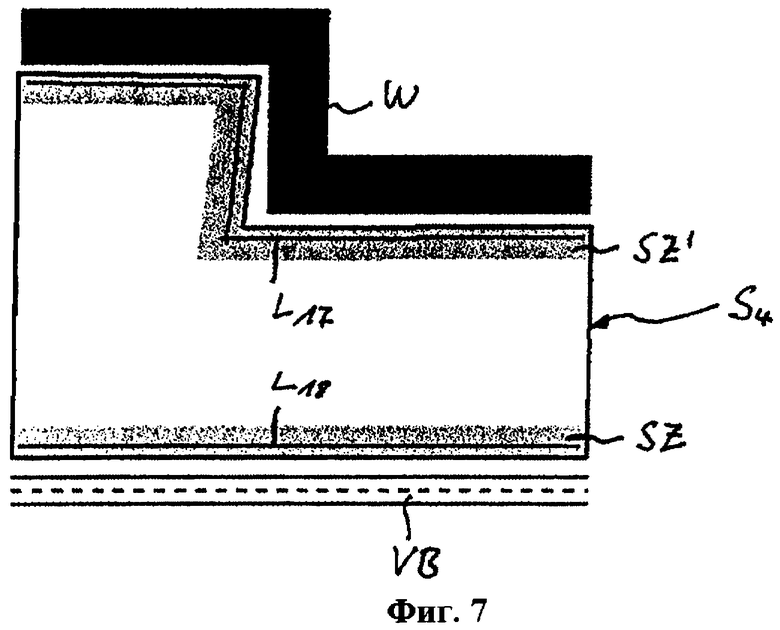
фиг.7 изображает территорию с обозначенными на ней областями безопасности,
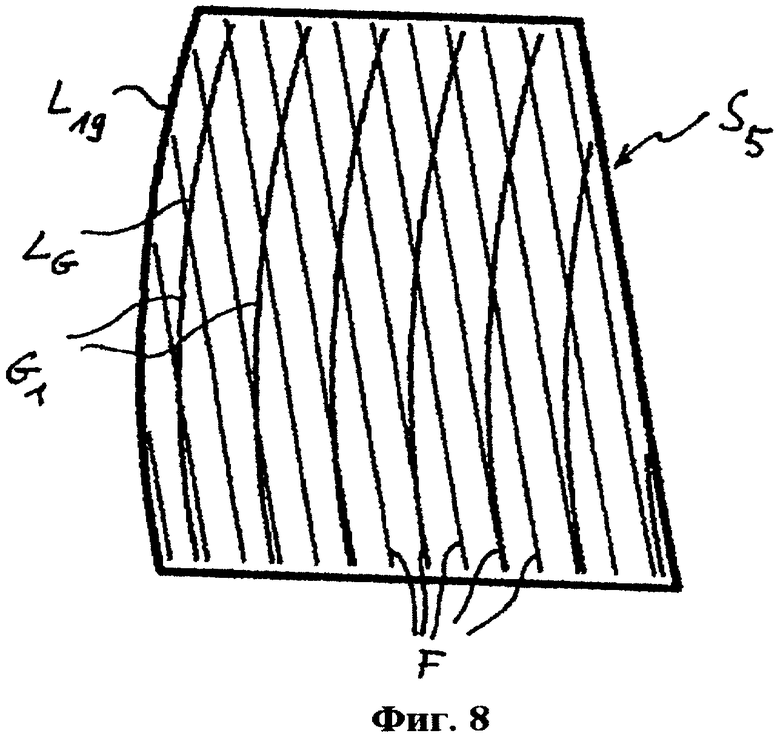
фиг.8 изображает территорию с маршрутами засева, выработанными на основе задающих линий, и дополнительно определенными проходами опрыскивания согласно первому примеру осуществления,
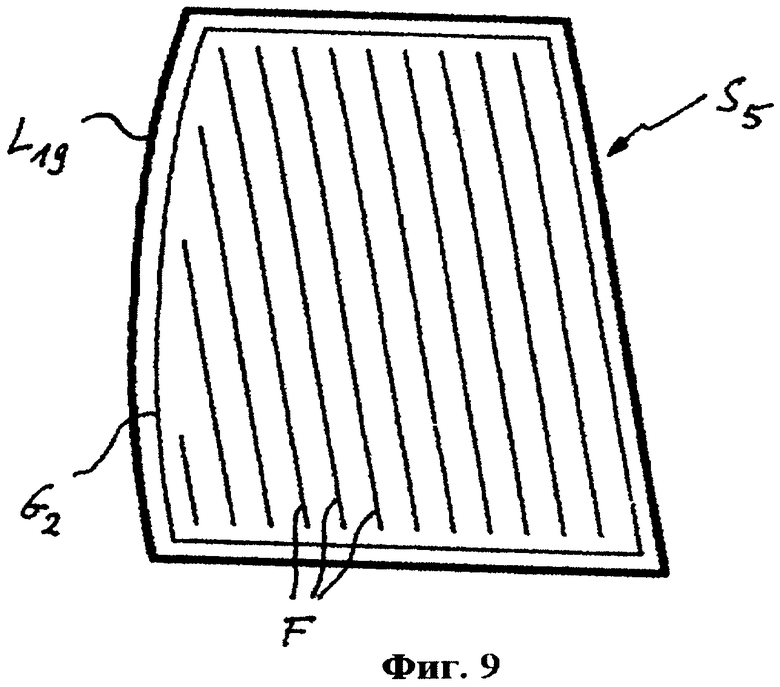
фиг.9 изображает территорию с маршрутами засева, выработанными на основе задающих линий, и дополнительно определенными проходами опрыскивания согласно второму примеру осуществления.
Осуществление изобретения
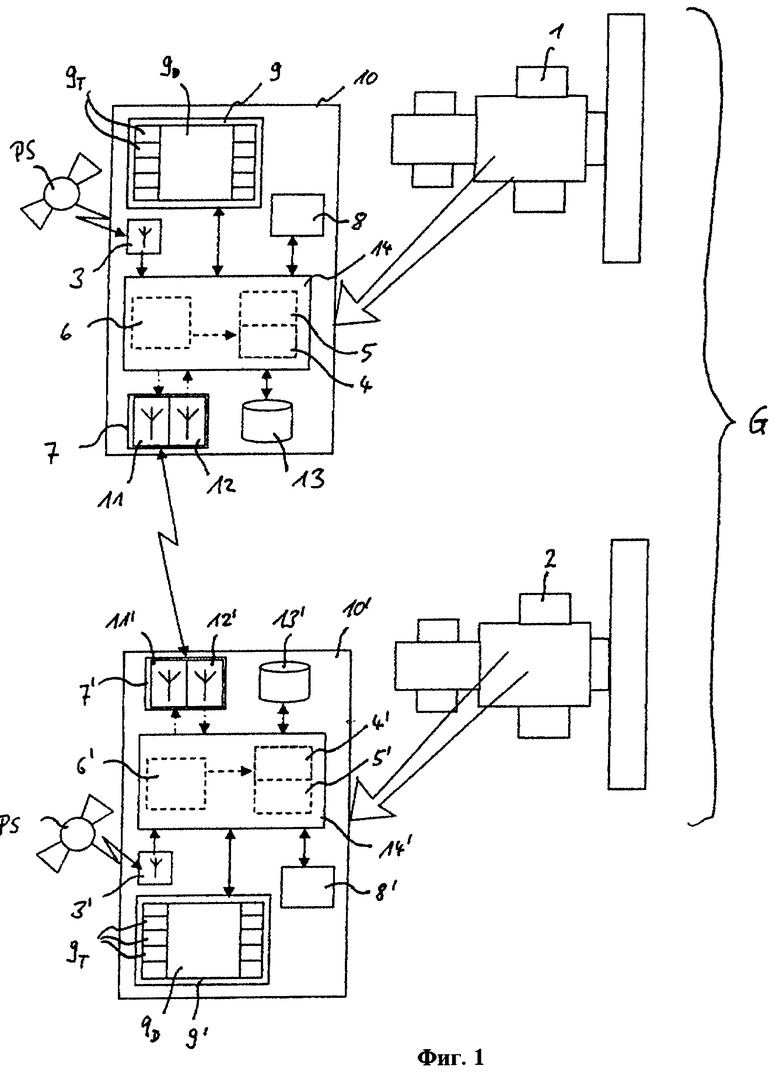
В представленном на фиг.1 примере осуществления системы управления в соответствии с изобретением в целях упрощения показаны только две одинаковые системы 1, 2 машин в виде двух зерноуборочных комбайнов 1, 2, которые могут использоваться совместно в составе группы G (то есть в комплексе машин) для обработки более обширной площади в возможно кратчайшее время.
Конструкция и рабочие процессы таких зерноуборочных комбайнов 1, 2, а также системы управления для управления комбайнами хорошо известны специалистам в данной области. Кроме того, например, из патентных документов ЕР 0821296 А1 и ФРГ №102004027242 А2 известны системы маршрутизации, описания которых включены в данное описание в качестве ссылки. Соответственно, для пояснения изобретения на фиг.1 схематично представлены только существенные компоненты систем, причем зерноуборочные комбайны 1, 2 выполнены идентичными в отношении этих компонентов.
К существенным компонентам устройств 10, 10' управления (которые также выполнены идентичными для обеих систем машин) относится блок 3, 3' определения местоположения, например приемник системы GPS (Global Positioning System - глобальная система навигации и определения местоположения), который принимает сигналы GPS от соответствующих спутников PS определения местоположения. Предпочтительно здесь имеется в виду приемник системы GPS, который работает в спутниковой системе определения местоположения с корректировкой, например в дифференциальной системе DGPS (в которой приемник GPS кроме спутниковых сигналов использует поправки, генерируемые опорной станцией, расположенной в фиксированном месте с известными координатами) для наиболее точного определения местоположения, предпочтительно с точностью до нескольких сантиметров.
Кроме того, устройства 10, 10' управления содержат блоки 6, 6' выработки данных маршрутизации, с помощью которых могут вырабатываться, например, любые задающие данные, в особенности задающие линии. Для этого, в качестве примера, посредством блока 3 определения местоположения может быть определено действительное местоположение зерноуборочного комбайна 1, 2. Эти данные действительного местоположения могут быть записаны с помощью соответствующих средств записи вдоль участка пути по мере движения машины для того, чтобы по ним генерировать задающие линии или задающие точки, как это было описано выше. Дополнительно информация по задающим точкам может вводиться на операторском интерфейсе 9, 9'. В показанных устройствах 10, 10' управления этот операторский интерфейс 9, 9' представляет собой индикаторный блок 9, 9' в виде сенсорного дисплея с центральным дисплейным полем 9D, на котором пользователю могут указываться различные данные, и расположенными по краю виртуальными клавишами 9T. С помощью этих клавиш оператор может вводить в систему данные, например дополнительные данные при выработке задающих данных. В частности, оператор может с помощью клавиш вводить начальную и конечную точки записи задающей линии. Как это будет подробно описано далее, на индикаторный блок 9 могут выводиться для оператора также планируемые маршруты и различные данные местоположения.
Компонентом устройств 10, 10' управления является также блок 7, 7' связи с передатчиком 11, 11' и приемником 12, 12', предназначенный для того, чтобы устройства 10, 10' управления зерноуборочных комбайнов 1, 2 могли связываться друг с другом и в особенности обмениваться данными маршрутизации.
Далее, каждое устройство 10, 10' управления содержит блок 5, 5' маршрутизации и блок 4, 4' координации.
Данные маршрутизации передаются на соответствующий блок 5, 5' маршрутизации, который на основе этих данных планирует оптимальный маршрут. При этом согласно изобретению могут привлекаться данные маршрутизации всех систем 1, 2 машин в пределах группы G, поскольку они могут быть получены в результате обмена через блок 7 связи. В соответствии с изобретением блок 4, 4' координации обеспечивает координацию процесса, то есть системы 1, 2 машин или их блоки 5, 5' маршрутизации генерируют совместный план маршрутов, содержащий оптимизированные маршруты для отдельных систем 1, 2 машин. Здесь следует еще раз подчеркнуть, что данные маршрутизации включают в себя также частичные маршруты, уже запланированные внутри блоков 5, 5' маршрутизации, с тем, чтобы блоки 5, 5' маршрутизации были проинформированы о планах маршрутизации другой системы машин для их учета при координации маршрутизации.
Блок 6, 6' выработки данных маршрутизации, блок 5, 5' маршрутизации, а также блок 4, 4' координации предпочтительно реализованы в виде модулей программного обеспечения в центральном процессоре 14, 14' соответствующего устройства 10, 10' управления.
Далее каждое устройство 10, 10' управления содержит соответствующее запоминающее устройство 13, 13'. В него закладываются или уже заложены, среди прочих, соответствующие данные маршрутизации, в особенности генерируемые задающие данные, которые содержат как данные подлежащей обработке территории, такие как границы обработки, данные урожайности и другие, так и параметры машин самих систем сельхозмашин, а также при необходимости параметры других систем машин в составе группы.
В показанном на фиг.1 примере осуществления каждое устройство 10, 10' управления содержит устройство 8, 8' управления движением, то есть автоматическое устройство рулевого управления, которое управляется от блока 5, 5' маршрутизации таким образом, чтобы направлять каждый зерноуборочный комбайн 1, 2 точно вдоль оптимизированных маршрутов, предусмотренных для данного зерноуборочного комбайна 1, 2.
Далее со ссылками на фиг.2-5 на различных примерах будет описано, каким образом в соответствии с изобретением с помощью объединенных в сеть или скоординированных блоков 5, 5' маршрутизации может быть выполнена оптимизированная маршрутизация для различных систем 1, 2 машин в составе группы G в самых различных ситуациях.
На фиг.2 показано, каким образом за счет квалифицированной записи определенных задающих линий L1, L2, L3, L4, L5, L6, L7, L8 могут быть определены отдельные области площади, то есть различные участки B1, B2, В3 в пределах площади S1 с многоугольными внешними кромками. Так, например, вначале может быть выполнен объезд по задающим линиям L1, L4, L5, L6, L7, L8, которые определяют внешние кромки площади S1. Дополнительные задающие линии L2, L3 могут служить для того, чтобы подразделить площадь S1 на три участка B1, В2, В3. Эти задающие линии L1, L2, L3, L4, L5, L6, L7, L8 могут быть определены первой системой машин, например, при засеве площади трактором с соответствующими посевными устройствами, и затем переданы на дальнейшие системы машин, которые используются позднее в технологической цепочке процесса. На основе этих задающих линий последующие системы машин могут планировать свои собственные оптимальные маршруты. В частности, при параллельной обработке такой площади S1 для отдельных участков B1, B2, В3 могут быть предназначены различные системы машин комплекса, которые на основе задающих линий, относящихся к конкретному участку B1, В2, В3, могут вырабатывать оптимальный маршрут, по которому соответствующая система машин обрабатывает данный участок B1, В2, В3. При этом для координации процесса обработки при разработке маршрутов должны быть в особенности учтены пограничные области и области краев поля. Другими словами, предпочтительно вырабатывается совместный план маршрутов, в котором маршруты для отдельных участков В1, В2, В3 интегрированы таким образом, что оптимизация производится в отношении комплексного процесса обработки, а не только в отношении отдельных участков B1, В2, В3. В том случае, когда задающие линии L1, L2, L3, L4, L5, L6, L7, L8 должны впервые определяться при эксплуатации комплекса параллельно работающих систем машин, предпочтительно отдельные системы машин также могут определять часть этих задающих линий L1, L2, L3, L4, L5, L6, L7, L8 и обмениваться между собой этими данными для возможно скорейшего получения всех задающих данных для маршрутизации.
Фиг.3 иллюстрирует пример такого решения. В этом примере площадь S1, по меньшей мере, параллельно обрабатывается двумя системами машин, например, двумя зерноуборочными комбайнами (не показаны). Для этого первая система машин движется вдоль верхней кромки площади и при этом производит уборку области верхнего края поля, освобождая ее. Одновременно верхний контур площади S2 записывается в качестве первой задающей линии L9. В то же самое время вторая система машин движется вдоль нижней кромки S2 площади и при этом убирает область нижнего края поля, освобождая ее, а также производит запись нижней задающей линии L11. Затем каждый комбайн передает определенную им задающую линию L9, L11 на другой комбайн. Далее второй комбайн движется на правом краю по первому участку пути снизу вверх и записывает следующую задающую линию L12. Параллельно первый комбайн движется по крайнему левому участку пути сверху вниз и определяет задающую линию L10. Таким образом, определены все кромки площади, и блоки маршрутизации могут планировать скоординированные оптимальные маршруты для комбайнов.
В показанном на фиг.3 примере осуществления для этого площадь S2 вновь подразделяется на два участка В4, B5, поскольку в данном случае такая стратегия оптимальна. Далее оба комбайна определяют свои частичные маршруты в основном самостоятельно, однако учитывают и используют данные маршрутизации другого комбайна. При этом первый комбайн может после соответствующего подразделения на участки уже спланировать свои маршруты и начать движение по ним, в то время как второй комбайн еще движется по более длинной правой кромке площади. Уже определенная им часть задающей линии L12 может в любой момент быть передана на первый комбайн и привлечена для маршрутизации. Таким образом, в данном примере первый комбайн вначале следует по своему маршруту R1 примерно до средней области площади S2, вдоль которой площадь S2 должна быть подразделена на два участка В4, B5. Затем он убирает средний участок, одновременно определяя следующую задающую линию L13. Далее эту задающую линию L13 смещают вправо на рабочую ширину захвата при уборке с получением при этом следующей задающей линии LV, которая может использоваться вторым комбайном в качестве виртуальной опорной линии для обработки на границе между участками В4, B5. Затем второй комбайн может произвести соответствующую маршрутизацию и двигаться от правого края вдоль маршрута R2 до участка пути, который соответствует производной задающей линии LV, с тем, чтобы после обработки этой полосы дальше двигаться по запланированному для него оптимальному маршруту R2.
На фиг.4 показан первый вариант возможного использования способа управления применительно к относительно большой прямоугольной площади S3, обрабатываемой тремя параллельно работающими зерноуборочными комбайнами 1, 2, 2' в составе одного комплекса машин. Комбайны 1, 2, 2' или их устройства управления могут быть выполнены в соответствии с фиг.1. Поскольку площадь S3 имеет прямоугольную форму, достаточно того, чтобы первый комбайн 1 вначале произвел объезд первой кромки, в данном случае левой кромки поля S3, и при этом было произведено генерирование задающей линии L14. Далее этот комбайн 1 передает задающую линию на следующие комбайны 2, 2' рабочего комплекса. Дополнительно производится обмен другими данными, в данном случае информацией о том, что рабочая ширина захвата для всех комбайнов комплекса одинакова и что согласно совместной стратегии каждый комбайн получает для обработки только каждую третью полосу. После этого отдельными комбайнами 1, 2, 2' вычисляются соответствующие оптимальные маршруты R3, R4, R5, и комбайны 1, 2, 2' могут направляться в соответствии с указываемыми маршрутами R3, R4, R5. Таким способом могут обрабатываться очень быстро большие площади полей, при этом за счет компетентного выбора полос обработки нет необходимости в том, чтобы отдельные комбайны 1, 2, 2' производили длительные маневры поворота и ориентации на направление движения, так как они могут непосредственно переходить к следующей полосе, подлежащей обработке. Поскольку отдельные комбайны 1, 2, 2' или их блоки маршрутизации находятся в постоянном режиме обмена данными и в особенности передают на другие комбайны данные о своем местоположении, маршрутизация может быть проведена таким образом, чтобы исключить возможность пересечения или ожидания во избежание пересечения, в особенности в областях V краев поля.
На фиг.5 еще раз показано то же самое поле S3, однако здесь при совместной обработке тремя системами машин предусмотрена другая стратегия обработки. Здесь также путем объезда крайней левой кромки поля первой системой машин определяется первая задающая линия L14. Однако в этом примере для обработки должны использоваться три системы машин с различной рабочей шириной захвата. Поэтому площадь S3 компетентным образом подразделяется на три участка B6, B7, B8, причем при подразделении учитывается, какой системой машин с какой рабочей шириной захвата должен обрабатываться каждый участок B6, B7, B8. Величины участков выбираются таким образом, что для обработки соответствующего участка B6, B7, B8 каждой системе машин требуется пройти точно четыре полосы F6, F7, F8 движения. Поскольку ширина полос движения различна, участки имеют, соответственно, различную ширину.
В качестве примера подразделение площади S3 на участки B6, B7, B8 может производиться первой системой машин, которая также определяет задающую линию L14. Для этого этой системе должны быть предварительно переданы данные рабочей ширины захвата других систем машин. Затем блок маршрутизации первой системы машин выводит, например, из первоначально определенной задающей линии L14 виртуальные задающие линии LV6, LV7, LV8 для отдельных участков B6, B7, B8. Эти данные совместно с информацией о ширине участков B6, B7, B8 передаются на системы машин, предназначенные для обработки соответствующих участков. Затем отдельные системы машин на основе задающих линий LV6, LV7, LV8 могут самостоятельно определить дальнейшие полосы F6, F7, F8 движения внутри своих участков B6, B7, B8 обработки и выбрать оптимальный маршрут с учетом параметров собственных машин. После этого оптимальные маршруты передаются обратно на первую систему машин, которая в данном случае работает как «мастер-система машин» и контролирует, не создается ли возможность пересечения в пограничных областях между участками B6, B7, B8. Другими словами, она обеспечивает, например, выбор маршрутов таким образом, что система машин, работающая на участке B6, работает на последней полосе F6 движения на границе с участком B7 только тогда, когда уже убрана первая полоса F7 движения на следующем участке B7 на границе с участком B6.
Очевидно, что в представленных на фиг.3-5 примерах осуществления речь идет только об относительно малых полях или участках полей. Эти примеры лишь иллюстрируют принципиальные возможности обработки полей. В действительности дело касается значительно более обширных территорий с множеством полос движения, когда для обработки должен использоваться комплекс множества параллельно работающих систем машин. Однако на основе приведенных примеров осуществления можно быстро понять, какие преимущества дает способ координированной маршрутизации по изобретению.
На фиг.6 еще раз более подробно показан индикаторный блок 9, 9' с дисплейным полем 9D и расположенными сбоку клавишами 9T для обслуживания устройства 10, 10' управления водителем. На дисплейном поле 9D показаны различные задающие линии, в данном случае задающая линия L15 для определения полос F движения и задающая линия L16 области края поля. Кроме того, могут быть указаны положения PH распознанных препятствий, таких как тюки соломы, мачты электросети, деревья и другие, собственное местоположение P1 транспортного средства, а также местоположение Р2 другой системы машин, которая, например, движется по параллельной полосе движения. Здесь имеет место «общая индикация», которая предоставляется в распоряжение всем водителям задействованных систем машин, так что водители получают все данные о собственной системе машин и о других системах. В частности, с помощью различных средств индикации полос движения могут указываться также, какие области полос движения уже обработаны, а какие еще подлежат обработке. Разумеется, кроме показанных здесь полос F движения могут указываться также полные маршруты, включая части маршрутов в областях края площади. Другими словами, указываются не только полосы движения, собственное местоположение и местоположение других систем машин, но также, какие полосы движения подлежат обработке соответствующими системами машин и каким образом системы машин переходят на другие полосы движения в областях краев площади.
С помощью клавиш 9T водитель может также выбирать вид представления, а также, например, переключаться из режима автоматического вождения на вождение с ручным управлением. В таком режиме ручного рулевого управления водителю указывается на дисплейном поле 9D, например, виртуальная опорная линия и символ местоположения обслуживаемой им системы 1, 2 машин, так что обеспечивается указание отклонения символа от виртуальной опорной линии, соответствующего отклонению системы машин от надлежащего маршрута. С таким подсобным средством направления водитель может относительно точно вести транспортное средство вдоль желаемого маршрута.
Как уже было упомянуто выше, в пределах плана маршрутов установлены определенные зоны безопасности, отнесенные к различным системам машин. Такой пример показан на фиг.7. На схеме показана площадь S4, граничащая по нижнему краю с областью VB открытого дорожного движения, в данном случае шоссе. Проезжающие по шоссе транспортные средства создают повышенный риск безопасности, то есть в этой области нужно особенно следить за тем, чтобы при развороте систем машин никакие части машин не заходили в область VB дорожного движения. С помощью задающей линии L18, которая проходит вдоль области VB дорожного движения и указывается перед началом работы, для каждой системы машин определяется зона SZ безопасности, предпочтительно зависящая от определенных рабочих параметров, таких как радиус поворота и рабочая ширина захвата системы машин. Далее зона SZ безопасности предназначается для соответствующей системы машин. В пределах этой зоны SZ безопасности может, например, ограничиваться или полностью отключаться режим автоматического вождения данной системы машин. Другая зона SZ' безопасности находится на схеме по фиг.7 на верхней кромке площади S4. Здесь площадь S4 граничит с лесной областью W. Из-за лесного покрова создается ненадежность приема спутниковых сигналов для определения местоположения. Поэтому здесь с помощью задающей линии L17, которая проходит вдоль верхней кромки площади, определяется дальнейшая зона SZ' безопасности для соответствующих систем машин и закрепляется за этими системами.
На фиг.8 и 9 в качестве примера представлено, каким образом посредством задающих линий может быть выработана или составлена координатная сетка для узких проходов G1, G2, в частности проходов для опрыскивания, которая затем может использоваться для управления системой учета проходов или включением частичной ширины захвата. В обоих вариантах различные полосы F движения и проходы G1, G2 определяются, например, для засева площади S5 и для последующего рабочего процесса опрыскивания и внесения удобрений. При этом вначале определяют задающую линию L19, которая соответствует полному периметру площади S5. После этого для засева устанавливают полосы F движения параллельно правой кромке площади, причем эти полосы движения имеют ширину в соответствии с рабочей шириной захвата сеялки.
Согласно варианту по фиг.8 вдоль левой, выпуклой кромки площади определяют смещенную задающую линию LG, которая служит для генерирования проходов G1 (проходов опрыскивания) для последующего опрыскивания поля. Расстояние между этими проходами G1 выбирают в соответствии с рабочей шириной захвата опрыскивателя. Проходы G1 опрыскивания в различных местах пересекаются с полосами F движения сеялки. Соответственно, система машин уже при засеве может учитывать запланированные проходы G1 опрыскивания и посредством автоматического действия системы учета проходов обеспечить, чтобы в области проходов G1 опрыскивания не было посевов.
На фиг.9 показан альтернативный вариант, в котором площадь S5 окружена по периметру проходом G2 опрыскивания. Этот способ особенно подходит для небольших площадей S5 для последующего опрыскивания и работы разбрасывателей минеральных удобрений.
В заключение следует еще раз отметить, что представленные на чертежах системы машин и системы управления, а также описанный в связи с ними способ являются только примерами осуществления изобретения. Специалисту в данной области понятно, что при осуществлении изобретения возможны различные изменения и модификации в пределах объема защиты. Следует также подчеркнуть, что использование в описании единственного числа применительно к различным признакам не исключает возможности их присутствия во множественном числе.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАЗРАБОТКИ ЗАДАЮЩИХ ЛИНИЙ ДВИЖЕНИЯ ДЛЯ РАБОЧИХ СЕЛЬХОЗМАШИН | 2007 |
|
RU2412580C2 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ СЕЛЬХОЗМАШИН И АВТОМАТИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2424642C2 |
| СИСТЕМА МАРШРУТИЗАЦИИ ДЛЯ СЕЛЬХОЗМАШИН | 2006 |
|
RU2423038C2 |
| СИСТЕМА МАРШРУТИЗАЦИИ ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХ МАШИН | 2005 |
|
RU2384987C2 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2006 |
|
RU2339203C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МАРШРУТА ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2467374C2 |
| Система мониторинга маршрутов движения сельскохозяйственных машин при выполнении полевых работ | 2017 |
|
RU2651420C1 |
| САМОХОДНАЯ УБОРОЧНАЯ СЕЛЬХОЗМАШИНА С УПРАВЛЯЕМЫМ ПЕРЕГРУЗОЧНЫМ УСТРОЙСТВОМ | 2008 |
|
RU2476061C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ АВТОМАТИЗАЦИИ СЕЛЬСКОХОЗЯЙСТВЕННЫХ РАБОТ | 2009 |
|
RU2498549C2 |
| СИСТЕМА СВЯЗИ ДЛЯ МОБИЛЬНЫХ И СТАЦИОНАРНЫХ УСТРОЙСТВ (ВАРИАНТЫ) | 2005 |
|
RU2388150C2 |
Способ маршрутизации для группы систем сельхозмашин для обработки территории, при котором в координации с блоками маршрутизации систем машин внутри группы систем машин на основе получаемых путем обмена данных маршрутизации вырабатывают совместный план маршрутов для соответствующей территории. При этом одну систему машин определяют в качестве мастер-машины, которая осуществляет координацию и маршрутизацию для других систем машин внутри группы систем машин. Система маршрутизации для выработки плана маршрутов для группы систем сельхозмашин для обработки территории содержит расположенные на различных системах сельхозмашин блоки определения местоположения, блоки выработки данных маршрутизации и блоки связи для передачи данных маршрутизации. Также система содержит один блок маршрутизации, который для приема данных маршрутизации связан с приемником. С блоком маршрутизации связан блок координации. Блок координации воздействует на блок маршрутизации таким образом, чтобы в координации с блоками маршрутизации других систем машин внутри группы систем машин на основе принимаемых данных маршрутизации вырабатывать совместный план маршрутов для соответствующей территории. При этом одна система машин работает в качестве мастер-машины, которая осуществляет координацию и маршрутизацию для других систем машин внутри группы систем машин, которые работают как клиентские машины. Снижается время обработки территории. 2 н. и 10 з.п. ф-лы, 9 ил.
1. Способ маршрутизации для группы (G) систем (1, 2, 2′) сельхозмашин для обработки территории (S1, S2, S3, S4, S5), подлежащей обработке, при котором системы (1, 2, 2′) машин оснащены блоками (6, 6′) выработки данных маршрутизации и состоят в связи обмена данными друг с другом, в координации с блоками маршрутизации других систем (1, 2, 2′) машин внутри группы систем (1, 2, 2′) машин на основе получаемых путем обмена данных (L1, L2, ... L19, LV, LV6, LV7, LV8, LG , SZ, SZ′) маршрутизации вырабатывают совместный план маршрутов для соответствующей территории (S1, S2, S3, S4, S5), причем одну систему (1, 2, 2′) машин определяют в качестве мастер-машины, которая осуществляет координацию и маршрутизацию для других систем (1, 2, 2′) машин внутри группы систем (1, 2, 2′) машин.
2. Способ по п.1, отличающийся тем, что данные (L1, L2, ... L19, LV, LV6 , LV7 , LV8 , LG, SZ, SZ′) маршрутизации содержат географические задающие данные (L1, L2, ... L19), которые определяют с помощью систем (1, 2, 2′) машин.
3. Способ по п.1 или 2, отличающийся тем, что подлежащую обработке территорию подразделяют на участки (В1, В2, ..., B8) на основе данных (L1, L2, ... L14) маршрутизации.
4. Способ по п.3, отличающийся тем, что посредством каждой системы машин определяют частичный план маршрутов для определенного участка (В4, В5, В6, В7, В8) подлежащей обработке территории (S2, S3).
5. Способ по п.1, отличающийся тем, что системы машин обрабатывают территорию (S5) последовательно друг за другом по времени.
6. Способ по п.1, отличающийся тем, что системы (1, 2, 2′) машин обрабатывают территорию (S2 , S3), по меньшей мере, частично параллельно.
7. Способ по п.6, отличающийся тем, что совместный план маршрутов динамично изменяют, когда к группе присоединяется новая система машин или система машин выбывает из группы.
8. Способ по п.1 или 2, отличающийся тем, что данные действительного местоположения отдельных систем (1, 2, 2′) машин определяют неоднократно и передают их на другие системы (1, 2, 2′) машин.
9. Способ по любому из пп.1, 2, 4-7, отличающийся тем, что для оператора системы (1, 2) машин с помощью индикаторного блока (9) при необходимости представляют карту, составленную на основе географических задающих данных, действительное местоположение (P1) и оптимальный маршрут соответствующей системы (1) машин, а также действительные местоположения (Р2) других систем (2) машин группы (G), находящихся на подлежащей обработке территории.
10. Способ по п.9, отличающийся тем, что оператору системы (1, 2) машин указывают маршруты других систем машин группы, находящихся на подлежащей обработке территории.
11. Способ по одному из пп.1, 2, 4-7, 10, отличающийся тем, что вырабатывают совместный план маршрутов, содержащий предназначенные для отдельных систем (1, 2) машин оптимизированные маршруты (R1, R2, R3, R4, R5) для обработки территории (S1, S2, S3, S4, S5), и системы (1, 2, 2′) машин направляют вдоль предназначенных для них маршрутов (R1, R2, R3, R4 , R5).
12. Система маршрутизации для выработки плана маршрутов для группы (G) систем (1, 2, 2′) сельхозмашин для обработки территории (S1, S2, S3, S4, S5), подлежащей обработке, содержащая расположенные на различных системах (1, 2, 2′) сельхозмашин блоки (3, 3′) определения местоположения, предназначенные для определения действительного местоположения (Р1, Р2) соответствующей системы (1, 2) машин, блоки (6, 6′) выработки данных маршрутизации и блоки (7, 7′) связи для передачи данных (L1, L2, ... L19 , LV, LV6 , LV7 , LV8 , LG, SZ, SZ′) маршрутизации, по меньшей мере, один блок (5, 5′) маршрутизации, который для приема данных (L1, L2, ... L19 , LV, LV6, LV7, LV8, LG , SZ, SZ′) маршрутизации связан с приемником (12, 12′), а также связанный с блоком (5, 5′) маршрутизации блок координации (4, 4′), который воздействует на блок (5, 5′) маршрутизации таким образом, чтобы в координации с блоками (5, 5′) маршрутизации других систем (1, 2, 2′) машин внутри группы систем (1, 2, 2′) машин на основе принимаемых данных (L1, L2, ... L19, LV, LV6, LV7, LV8, LG, SZ, SZ′) маршрутизации вырабатывать совместный план маршрутов для соответствующей территории (S1, S2, S3, S4, S5), причем одна система (1, 2, 2′) машин работает в качестве мастер-машины, которая осуществляет координацию и маршрутизацию для других систем (1, 2, 2′) машин внутри группы систем (1, 2, 2′) машин, которые работают как клиентские машины.
| DE 102004034799 А1, 16.03.2006 | |||
| DE 102004043169 А1, 09.03.2006 | |||
| Устройство для упаковки предметовВ плЕНКу | 1979 |
|
SU821296A1 |
| DE 102004027242 А1, 22.12.2005 | |||
| Устройство для определения @ - @ моментов импульсной переходной функции | 1984 |
|
SU1193696A2 |
| Труболовка | 1974 |
|
SU502110A2 |

