Область техники, к которой относится изобретение
Изобретение относится к области железнодорожной автоматики и телемеханики и может быть использовано для регулирования движения поездов.
Уровень техники
Известен способ регулирования движения поездов с использованием тональных рельсовых цепей с централизованным размещением аппаратуры [Типовые материалы для проектирования 410306-ТМП, АВТОБЛОКИРОВКА С ТОНАЛЬНЫМИ РЕЛЬСОВЫМИ ЦЕПЯМИ И ЦЕНТРАЛИЗОВАННЫМ РАЗМЕЩЕНИЕМ ОБОРУДОВАНИЯ, АБТЦ-03. ОАО «РЖД» Филиал института по проектированию сигнализации, централизации, связи и радио на железнодорожном транспорте «ГИПРОТРАНССИГНАЛСВЯЗЬ». 2004 г.]. Информация о состоянии путевых участков формируется с помощью рельсовых цепей и по линейным проводам передается на прилегающие к перегону станции. Между станциями предусматривается несколько двухпроводных линий для обмена информацией о состоянии блок-участков со схемным контролем изоляции линейных проводов на базе реле первого класса надежности.
На подвижной состав информация о состоянии впереди лежащих путевых участков передается с помощью оптических приборов и системы АЛС.
Недостатками способа являются использование напольных и локомотивных светофоров, большая жильность кабеля, невысокая точность определения координат хвоста поезда, использование рельсовых цепей с несколькими несущими и модулирующими частотами.
Известен способ регулирования движения поездов основанный на контроле местонахождения поездов, результаты которого обрабатываются станционной ЭВМ. Полученная информация о количестве свободных путевых участков совместно с информацией о номере пути приема по радиоканалу передается на локомотивы, находящиеся в зоне управления станционных ЭВМ. Локомотивные ЭВМ с учетом принятой информации и информации, хранящейся в памяти о параметрах поезда и пути, путевого развития станций определяют допустимую и оптимальную скорости движения для каждой точки пути и выводят на экран локомотивного навигатора кривые скорости с отметками мест контроля бдительности, подготовки к торможению, начала торможения и места остановки, а также рекомендуемые позиции локомотивного контроллера и крана машиниста, которые устанавливаются электромеханическим устройством [Патент №2662313 РФ, Способ регулирования движения поездов системой автоблокировки с централизованным размещением аппаратуры, Полевой Ю.И., Горелик А.В. Опубл. 25. 07. 2018. Бюл. №21, МПК В61L 23/16].
Недостатками способа являются использование напольных устройств на перегоне, кабельных линий для обмена информацией между станциями. Данное техническое решение выбрано в качестве прототипа.
Раскрытие изобретения
Техническим результатом, на достижение которого направлено данное техническое решение, является упразднение путевых приборов и кабельных линий на перегоне, повышение точности определения координаты хвоста поезда, снижение капитальных и эксплуатационных затрат на строительство и эксплуатацию устройств автоматики и телемеханики.
Способ регулирования движения поездов, основанный на контроле состояний путевых перегонных участков, установленных маршрутах на станции приема, информация о которых по радиоканалу с постов электрической централизации ЭЦ передается на локомотивы, находящиеся в зоне связи со станциями ЗСЛС; локомотивные ЭВМ-ЭВМЛ с учетом принятой информации и информации, хранящейся в памяти о параметрах поезда и пути, путевого развития станций определяют оптимальную скорость движения поезда, а также рекомендуемые позиции локомотивного контроллера и крана машиниста, которые устанавливаются электромеханическим устройством; а с локомотивов передается информация на посты ЭЦ о координатах головы и хвоста поезда, отличающийся тем, что
состояния перегонных путевых участков определяются с помощью мобильного контрольного блока КБ, узлы которого размещены на хвостовом вагоне поезда, который соединен с локомотивом двухпроводной линией связи, одним проводом которой являются рельсы, а другим - отрезки проводов, соединяющие головки междувагонных соединительных рукавов тормозной магистрали ТМ, эти провода служат, во-первых, для питания приборов КБ с локомотивного генератора ГЛ, и, во-вторых, для передачи информации на локомотив с КБ о состоянии путевых участков за хвостом поезда;
информация о местонахождении головы и хвоста поезда, состоянии путевых участков за хвостом поезда по радиосвязи передается на пост ЭЦ станции приема, а на локомотивы, находящиеся в ЗСЛС, с постов ЭЦ станции приема - о местонахождении хвостовых вагонов, неисправности рельсовых нитей, установленных маршрутах;
информация о состоянии перегонных путевых участков между постами ЭЦ смежных станций, сообщения, связанные с изменением направления движения на перегоне, передаются по радиосвязи;
системы микропроцессорной централизации МПЦ с учетом принятой информации с локомотивов поездов, идущих в направлении станции, и информации со смежных станций, а также информации, хранящейся в памяти станционных ЭВМ-ЭВМС, о путевом развитии станций и перегонов, параметрах пути и поездов, прогнозного графика движения поездов устанавливают маршруты и передают информацию на станционные радиостанции РСС для ее дальнейшей передачи на локомотивы и смежные станции для осуществления регулирования движения поездов;
ЭВМЛ с учетом принятой по радиосвязи информации и информации, хранящейся в памяти, о путевом развитии станций и перегонов, параметрах пути и поезда определяют оптимальную скорость ведения поезда и посредством электромеханического регулятора скорости ЭМРС реализуют эту скорость;
для контроля целостности рельсовых нитей за хвостом поезда в КБ размещен тональный вагонный генератор рельсовой цепи ГРЦВ частотой 1 кГц, выводы выхода которого соединены с корпусом предпоследнего вагона и корпусом хвостового вагонов, в зев автосцепки установлена изолирующая прокладка для исключения протекания тока по элементам автосцепки между двумя последними вагонами, ток от ГРЦВ между вагонами протекает только по рельсам;
над рельсами между двумя последними вагонами установлены приемные катушки, в которых наводится примерно одинаковая ЭДС при исправных рельсовых нитях, катушки включены встречно, суммарная ЭДС близка к нулю;
вагонный приемник рельсовой цепи ПРЦВ сравнивает текущее значение суммарной ЭДС с пороговым значением, при неисправном рельсе кратковременно (на одну с. ) выключает ГРЦВ частотой 0,5 кГц, который прекращает передачу сигнала на локомотив по двухпроводной линии связи об исправном состоянии рельсовых нитей за хвостом поезда;
контроль целостности рельсовой линии осуществляется на коротком путевом участке длиной 5-10 м в условиях вибрации (при движении поезда), что создает благоприятные условия для достоверного контроля целостности рельсовых нитей;
проверка исправного состояния узлов контрольного блока осуществляется за счет периодического кратковременного шунтирования одной из приемных катушек, что создает имитацию повреждения рельсовой нити, такой режим приема сигнала на локомотиве расценивается как исправное состояние узлов КБ и двухпроводной линии связи с локомотивом, а, следовательно, и следования поезда в полном составе.
Краткое описание чертежей
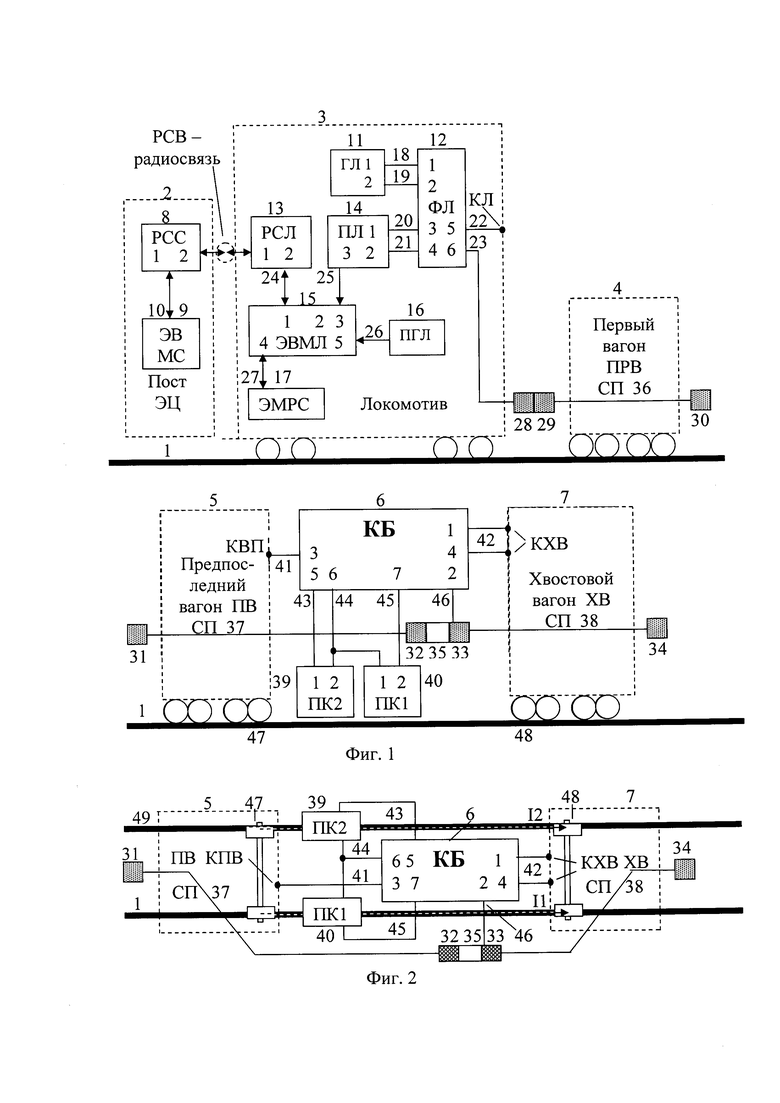
На фиг. 1 представлена структурная схема устройств регулирования движения поездов с междувагонным контрольным блоком КБ, на фиг. 2 -схема подключения КБ, на фиг. 3 - схема КБ.
Описание изобретения Условные обозначения на фиг. 1, 2 и 3:
1 - первый рельс (левый рельс по ходу движения поезда);
2 -поста ЭЦ со структурной схемой соединения приборов;
3 - локомотив Л со структурной схемой соединения приборов;
4 -первый вагон ПРВ;
5 -предпоследний вагон ПВ;
6 - междувагонный контрольный блок КБ для фиксации целостности рельсовых нитей;
7 -хвостовой вагон ХВ;
8 - станционная радиостанция РСС;
9 - станционная ЭВМ-ЭВМС;
10 - соединение между ЭВМС и РСС;
11 - локомотивный генератор ГЛ;
12 - локомотивный фильтр ФЛ;
13 - локомотивная радиостанция PC Л;
14 - локомотивный приемник ПЛ;
15 - локомотивная ЭВМ-ЭВМЛ;
16 - локомотивный приемник ГЛОНАСС-ПГЛ;
17 - электромеханический регулятор скорости ЭМРС (переключает кран машиниста и локомотивный контроллер);
18 и 19 - соединения между ГЛ и ФЛ;
20 и 21 - соединения между ПЛ и ФЛ;
22 - соединение между ФЛ и (корпусом) локомотива Л;
23 - соединение между ФЛ и головкой междувагонного рукава тормозной магистрали ТМ;
24 - соединение между РСЛ и ЭВМЛ;
25 - соединение между ПЛ и ЭВМЛ;
26 - соединение между ПГЛ и ЭВМЛ;
27 - соединение между ЭВМЛ и ЭМРС;
28, 29, 30, 31, 32, 33 и 34 - головки междувагонных рукавов тормозной магистрали ТМ;
35 - изолятор между узлами автосцепки (износоустойчивая прокладка);
36, 37 и 38 - соединительные провода СП между головками междувагонных рукавов одного вагона;
39 и 40 - вторая и первая приемные катушки ПК2 и ПК1;
41 и 42 - соединения между ПВ (КПВ - корпус ПВ) и КБ, КБ и ХВ (КХВ - корпус ХВ) соответственно;
43 - соединение между ПРЦВ (КБ), ЭШВ (КБ) и ПК2;
44 - соединения между ЭШВ (КБ), ПК2 и ПК1;
45 - соединения между ПРЦВ (КБ) и ПК1;
46 - соединение между КБ и головкой рукава ТМ;
47 и 48 - колесные пары предпоследнего и последнего вагонов соответственно;
49 - второй рельс (правый рельс по ходу движения поезда);
50 - вагонный фильтр ФВ;
51 - вагонный выпрямитель ВВ;
52 - аккумуляторная батарея (4 акк.);
53 - вагонный генератор рельсовой цепи ГРЦВ;
54 - вагонный генератор ГВ;
55 - вагонный одновибратор ОВВ;
56 - вагонная логическая микросхема НЕВ;
57 - вагонный мультивибратор МВВ;
58 - вагонный электронный шунт ЭШВ;
59 - вагонный приемник рельсовой цепи ПРЦВ;
60 и 61 - соединения между ФВ и ВВ;
62 и 63 - плюсовой и минусовой полюса источника питания;
64 и 65 - соединения между ФВ и ГВ;
66 - соединение между НЕВ и ГВ;
67 - соединение между ОВВ и НЕВ;
68 - соединение между МВВ и ЭШВ;
69 - соединение между ПРЦВ и ОВВ;
В тексте и на фигурах приведены дополнительно обозначения
К1, К2, К3, К4, К5, К6 и К7 - клеммы блока КБ;
ЗСЛС - зона двухсторонней радиосвязи между РСЛ 13 и РСС 8 (станции приема) устанавливается с выходом поезда на перегон и прекращается с выходом поезда на следующий перегон;
КПВ - клемма на предпоследнем вагоне для крепления провода к корпусу;
КВХ - клемма на хвостовом вагоне для крепления провода к корпусу;
КЛ - локомотивная клемма для крепления провода к корпусу;
ПВ - предпоследний вагон;
РВ - первый вагон;
РЛ - рельсовая линия;
РСВ - радиосвязь для обмена информацией между локомотивом и впередилежащей станцией;
РЦ - рельсовая цепь;
ТМ - тормозная магистраль;
ХВ - хвостовой вагон.
Ниже приведено описание способа регулирования движения поездов. При выходе поезда на перегон устанавливается двухсторонняя связь между локомотивной радиостанцией РСЛ 13 и радиостанцией станции приема РСС 8. Эта связь сохраняется до выхода поезда на следующий перегон. Участок пути (перегон и станция), где осуществляется связь между РСЛ 13 и РСС 8, является зоной связи ЗСЛС.С локомотива на пост ЭЦ 2 станции приема передается информация о местонахождении поезда, свободности и исправности путевых участков за хвостом поезда. Состояние участков контролируется мобильным устройством, приборы которого находятся на локомотиве и у хвостового вагона (между двумя последними вагонами) в контрольном между вагонном блоке КБ 6. Со станции приема на локомотив передается информация о местонахождении хвостовых вагонов (всех) поездов пути перегона, по которому поезда идут в сторону станции, неисправностях рельсовых нитей и установленных маршрутах на станции (маршрутов приема и отправления). Регулирование движения поездов на станциях осуществляется типовыми устройствами ЭЦ 2 (МПЦ).
Связь между РСЛ 13 и РСС 8 станции приема устанавливается по сигналу с приемника ГЛОНАС ПГЛ 16, когда локомотив, отправляющегося поезда с соседней станции, пересекает границу станции. В это же время прекращается радиосвязь между РСЛ 13 и РСС станции отправления (эта РСС на фиг. 1, 2 и 3 не представлена).
Между смежными станциями устанавливается непрерывная радиосвязь для обмена информацией о состоянии путевых участков, расположенных между станциями, для осуществления изменения направления движения на перегоне и выполнения других операций.
Для питания приборов блока КБ 6 с локомотива и передачи информации с блока КБ на локомотив используется двухпроводная линия связи, одним проводом которой являются рельсы, а другим - отрезки проводов, соединяющие головки междувагонных соединительных рукавов тормозной магистрали ТМ.
Для регулирования движения поездов и выбора (расчета) оптимальной скорости на постах ЭЦ 2 используются станционные ЭВМ-ЭВМС 9, в памяти которых хранится информация о путевом развитии станций и перегонов, и локомотивные ЭВМ-ЭВМЛ 15, в памяти которых хранится информация о путевом развитии станций и перегонов, плане и профиле пути, параметрах поезда.
Непрерывно обновляемая информация о координатах хвостовых вагонов поездов совместно с информацией о параметрах пути и поездов позволяет определить оптимальную скорость с учетом затрат на тягу поездов и поддержание прогнозного графика движения поездов.
Между поездами может быть задан минимально допустимый интервал попутного следования, т.к. предусматривается целевое торможение поезда на хвост впереди идущего поезда, а не на границу блок-участка. Это повышает пропускную способность перегона.
В настоящее время контроль целостности рельсовых нитей осуществляется посредством рельсовых цепей РЦ, которые могут обнаружить излом рельса при нарушении электрической цепи рельсовой нити. На достоверность контроля целостности рельсовой нити влияют следующие факторы: колебание сопротивления изоляции, координата места излома рельсовой нити, значение входных сопротивлений по концам РЦ, частота сигнального тока и др. Многократно снизить негативное влияние перечисленных факторов на достоверность контроля целостности рельсовых нитей можно за счет сокращения длины РЦ с 1000-2500 м до 5-10 м. Повысить достоверность контрольного режима можно за счет осуществления контроля целостности рельсовой нити в условиях вибрации (при движении поезда). Поэтому обеспечить эффективный контроль целостности рельсовых нитей можно за счет мобильного устройства, которое размещается на подвижном составе и непрерывно осуществляет контроль короткой РЦ по всему пути следования поезда.
Устройство контроля размещается в хвосте поезда для того, чтобы можно было достоверно контролировать состоянии рельсовых нитей за хвостом поезда. Аналогичное устройство может быть установлено и в голове поезда (на локомотиве или на первом вагоне, в настоящем техническом решении такие устройства не представлены) для того, чтобы при обнаружении неисправности рельсовой нити осуществить проход опасного участка на выбеге, что значительно снизит риск проследования опасного участка.
Таким образом, использование мобильного устройства для контроля состояния РЛ значительно повышает не только пропускную способность, но и безопасность движения поездов. Затраты на оборудование поездов мобильными контрольными устройствами незначительны по сравнению с экономической выгодой от повышения пропускной способности и безопасности движения поездов. Использование предложенных устройств в системе регулирования движения поездов потребует затрат на обустройство дополнительных каналов радиосвязи между локомотивами и станциями, а также и между станциями. Но при этом на перегоне не будет никаких устройств автоматики и телемеханики (рельсовых цепей, светофоров, кабельных линий, дроссель-трансформаторов и т.д.).
Переезды могут оборудоваться типовыми устройствами, но без рельсовых цепей и линий связи. Для питания устройств автоматики и телемеханики, освещения и отопления достаточно одноцепной высоковольтной линии от ближайшей станции, и резервных аккумуляторов. Вязь переездных устройств с поездами и станциями может быть осуществлена по радиоканалам.
Регулирование движения поездов осуществляется с помощью устройств и приборов, расположенных на посту ЭЦ 2, подвижном составе (локомотив 3, вагоны 4, 5 и 7, контрольный блок КБ 6). Для подачи электропитания с локомотива 3 на контрольный блок КБ 6 используется двухпроводная линия, одним проводом которой являются рельсы, другим - отрезки однопроводного соединительного провода СП 36, 37 и 38 между головками междувагонных рукавов 29, 30, 31, 32, 33 и 34. Эта же линия используется для передачи информации с контрольного блока 6 на локомотив 3 о следовании поезда в полном составе и исправном состоянии рельсовых нитей за хвостом поезда.
На локомотиве 3 установлена ЭВМЛ 15 для обработки информации, которую она получает: с ПГЛ 16 по соединению 26 о местонахождении локомотива, с РСЛ 13 по связи 24 о состоянии впереди лежащих участков пути и установленных маршрутов, с ПЛ 14 о состоянии позади лежащих участков по связи 25, с ЭМРС 17 о установленных позициях крана машиниста и локомотивного контроллера (кран и контроллер на фиг. 1 не представлены) по связи 27, по этой же связи осуществляется управление краном машиниста и локомотивным контроллером, а по связи 24 - передача информации на пост ЭЦ 2 станции о состоянии участков за хвостом поезда. РСЛ 13 обменивается информацией с РСС 8 поста ЭЦ 2, которая также обменивается информацией с ЭВМС 9 о состоянии путевых участках на перегоне. ПЛ 14 через ФЛ 12 с участием связей 20, 21, 22 и 23 получает информацию о состоянии путевых участков за хвостом поезда. Питание блока КБ 6 осуществляется от ГЛ 11 с участием ФЛ 12 и связей 18, 19, 22 и 23, двухпроводной линии, связей 42 и 46.
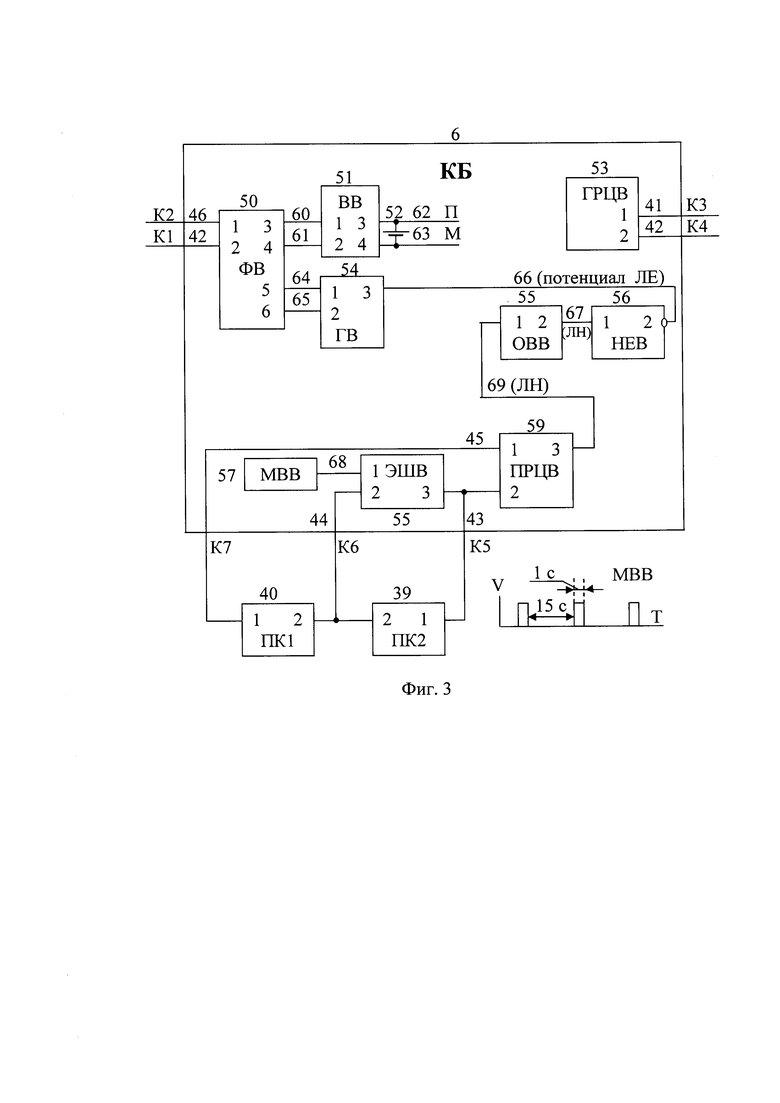
Между двумя последними вагонами установлен контрольный блок КБ 6 (фиг. 2) для фиксации повреждения рельсовой нити и передачи информации по двухпроводной линии на локомотив о состоянии путевых участков за хвостом поезда. В КБ 6 установлен вагонный фильтр ФВ 50 для осуществления питания приборов КБ 6 и передачи информации на локомотив. С локомотива поступает переменный ток на ФВ 50 частотой 50 Гц по соединениям 42 и 46, который затем по соединениям 60 и 61 поступает на выпрямитель ВВ 51, выпрямленный ток по соединениям 62 (плюсовой полюс) и 63 (минусовой полюс) поступает на аккумуляторную батарею 52 и другие приборы КБ 6. Вагонный генератор тональной частоты для питания рельсовой цепи ГРЦВ 53 по соединениям 41 и 42 (фиг. 3 и 2) подсоединен к корпусам последних вагонов в точках КВП и КВХ. По рельсам 1 и 49 между предпоследним вагоном ПВ 5 и хвостовым вагонами ХВ 7 протекают токи II и 12, которые наводят ЭДС в первой и второй приемных катушках ПК1 40 и ПК2 39. Токи по рельсам протекают от ПВ 5 к ПХ 7. Катушки включены так, что суммарная ЭДС, при одинаковых значениях токов, равна нулю. ПК1 40 и ПК2 39 подключены к КБ 6 по соединениям 43, 44 и 45. При исправных рельсовых нитях на входах 1 и 2 приемника рельсовой цепи ПРЦВ 59 разность потенциалов небольшая, ниже порогового значения, при этом на выходе 3 ПРЦВ 59 появляется потенциал логической единицы ЛЕ.
При нарушении целостности одной рельсовой нити на контрольном участке между последними вагонами на входах 1 и 2 ПРЦ 59 появляется разность потенциалов, превышающая пороговое значение, на выходе 3 ПРЦ 59 - потенциал логической единицы ЛЕ. Изменение потенциала по соединению 69 передается на вход 1 вагонного одновибратора ОВВ 55, на выходе 2 которого появляется трехсекундный импульс, благодаря которому с участием связей 67 и 66 и вагонного логического элемента НЕВ 56 на 3 с. выключается вагонный генератор ГВ 54. По соединениям 64 и 65 через ФВ 50 ГВ 54 передает на локомотив 3 информацию о нарушении целостности рельсовой нити. Для проверки исправности устройств контроля целостности рельсовых нитей, предусмотрен вагонный мультивибратор МВВ 57, который с интервалом 15 с. выдает трехсекундные импульсы (см. временную диаграмму на фиг. 3). По соединению 68 МВВ 57 осуществляет воздействие на вагонный электронный шунт ЭТТ ТВ 55, который с участием соединений 43 и 44 шунтирует ПК2 В 39. В этот момент на входах 1 и 2 приемника ПРЦВ 59 появляется разность потенциалов, превышающая пороговое значение (как и при обнаружении неисправности рельсовой нити), а на выходе 3 ПРЦВ 59 появляется потенциал логической единицы ЛЕ, благодаря которому на локомотив передается контрольная информация (псевдоповреждение) об исправной работе контрольных устройств. Принимаемая ЭВМЛ 15 на локомотиве 3 информация с пятнадцатисекундными интервалами, воспринимается как сигналы проверки исправной работы контрольных устройств.
Изобретение относиться к методам регулирования движения поездов. Способ основан на контроле состояний перегонных путевых участков мобильными устройствами, размещенными на локомотиве и между двумя последними вагонами поезда. Информация о состоянии путевых участков за хвостом поезда, а также координаты головы и хвоста поезда по радиосвязи передаются на станцию приема. Со станции приема на локомотивы поступает информация о координате хвостового вагона впередиидущего поезда и установленных маршрутах на станции приема. Дополнительно осуществляется контроль целостности рельсовой линии посредством мобильных устройств на коротком участке рельсовой цепи длиной 5-10 м в условиях вибрации при движении поезда. Достигается возможность отказа от использования путевых приборов и кабельных линий на перегоне. 3 ил.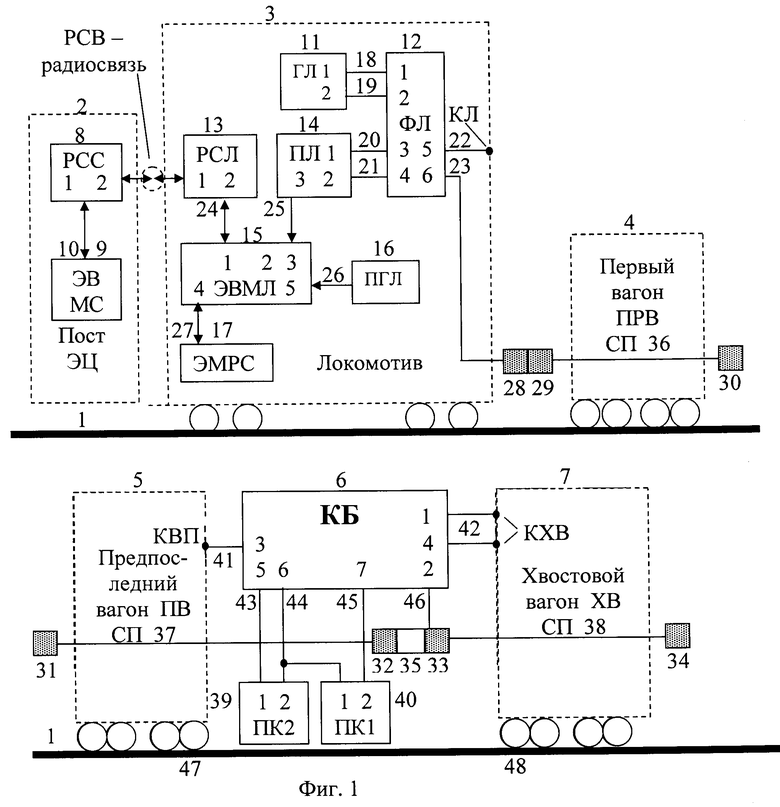
Способ регулирования движения поездов, основанный на контроле состояний путевых перегонных участков, установленных маршрутов на станции приема, информация о которых по радиоканалу с постов электрической централизации ЭЦ передается на локомотивы, находящиеся в зоне связи со станциями ЗСЛС; локомотивные ЭВМ-ЭВМЛ с учетом принятой информации и информации, хранящейся в памяти о параметрах поезда и пути, путевого развития станций определяют оптимальную скорость движения поезда, а также рекомендуемые позиции локомотивного контроллера и крана машиниста, которые устанавливаются электромеханическим устройством; а с локомотивов передается информация на посты ЭЦ о координатах головы и хвоста поезда, отличающийся тем, что состояния перегонных путевых участков определяются с помощью мобильного контрольного блока КБ, узлы которого размещены на хвостовом вагоне поезда, который соединен с локомотивом двухпроводной линией связи, одним проводом которой являются рельсы, а другим - отрезки проводов, соединяющие головки междувагонных соединительных рукавов тормозной магистрали ТМ, эти провода служат, во-первых, для питания приборов КБ с локомотивного генератора ГЛ и, во-вторых, для передачи информации на локомотив с КБ о состоянии путевых участков за хвостом поезда; информация о местонахождении головы и хвоста поезда, состоянии путевых участков за хвостом поезда по радиосвязи передается на пост ЭЦ станции приема, а на локомотивы, находящиеся в ЗСЛС, с постов ЭЦ станции приема - о местонахождении хвостовых вагонов, неисправности рельсовых нитей, установленных маршрутах; информация о состоянии перегонных путевых участков между постами ЭЦ смежных станций, сообщения, связанные с изменением направления движения на перегоне, передаются по радиосвязи; системы микропроцессорной централизации МПЦ с учетом принятой информации с локомотивов поездов, идущих в направлении станции, и информации со смежных станций, а также информации, хранящейся в памяти станционных ЭВМ-ЭВМС, о путевом развитии станций и перегонов, параметрах пути и поездов, прогнозного графика движения поездов устанавливают маршруты и передают информацию на станционные радиостанции РСС для ее дальнейшей передачи на локомотивы и смежные станции для осуществления регулирования движения поездов; ЭВМЛ с учетом принятой по радиосвязи информации и информации, хранящейся в памяти, о путевом развитии станций и перегонов, параметрах пути и поезда определяют оптимальную скорость ведения поезда и посредством электромеханического регулятора скорости ЭМРС реализуют эту скорость; для контроля целостности рельсовых нитей за хвостом поезда в КБ размещен тональный вагонный генератор рельсовой цепи ГРЦВ частотой 1 кГц, выводы выхода которого соединены с корпусом предпоследнего вагона и корпусом хвостового вагонов, в зев автосцепки установлена изолирующая прокладка для исключения протекания тока по элементам автосцепки между двумя последними вагонами, ток от ГРЦВ между вагонами протекает только по рельсам; над рельсами между двумя последними вагонами установлены приемные катушки, в которых наводится примерно одинаковая ЭДС при исправных рельсовых нитях, катушки включены встречно, суммарная ЭДС близка к нулю; вагонный приемник рельсовой цепи ПРЦВ сравнивает текущее значение суммарной ЭДС с пороговым значением, при неисправном рельсе кратковременно выключает ГРЦВ частотой 0,5 кГц, который прекращает передачу сигнала на локомотив по двухпроводной линии связи об исправном состоянии рельсовых нитей за хвостом поезда; контроль целостности рельсовой линии осуществляется на коротком путевом участке длиной 5-10 м в условиях вибрации, что создает благоприятные условия для достоверного контроля целостности рельсовых нитей; проверка исправного состояния узлов контрольного блока осуществляется за счет периодического кратковременного шунтирования одной из приемных катушек, что создает имитацию повреждения рельсовой нити, такой режим приема сигнала на локомотиве расценивается как исправное состояние узлов КБ и двухпроводной линии связи с локомотивом, а, следовательно, и следования поезда в полном составе.
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ БЕЗ НАПОЛЬНЫХ УСТРОЙСТВ ЖЕЛЕЗНОДОРОЖНОЙ АВТОМАТИКИ | 2019 |
|
RU2712364C1 |
| СПОСОБ КОНТРОЛЯ ЦЕЛОСТНОСТИ РЕЛЬСОВЫХ НИТЕЙ ПО СООТНОШЕНИЮ ЗНАЧЕНИЙ ТОКОВ В РЕЛЬСАХ | 2019 |
|
RU2706607C1 |
| Устройство для автоматической электрической сигнализации о разрыве поезда | 1947 |
|
SU71193A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ СИСТЕМОЙ АВТОБЛОКИРОВКИ С ЦЕНТРАЛИЗОВАННЫМ РАЗМЕЩЕНИЕМ АППАРАТУРЫ | 2017 |
|
RU2662313C1 |

