Предлагаемое техническое решение принадлежит к лабораторным установкам, предназначенным для определения сил присоединенной инерции и демпфирования тел различной формы при их свободных затухающих колебаниях в жидкости. Оно рекомендуется для применения в судостроении и гидротехнике, связанной с расчетами качки судов и воздействием волн на стационарные морские сооружения.
Известен метод кренования судов в натурных условиях и их моделей в лабораторных условиях, в результате чего определяется их коэффициенты поперечной остойчивости kΘ,=gρVh, где V - водоизмещение судна (модели), а h - метацентрическая высота. Затем проводится раскачка судов или моделей и записывается процесс их бортовых затухающих колебаний (Справочник по теории корабля «Статика судов. Качка судов» т.2./ Под редакцией Я.И.Войткунского. - Л.: Судостроение, 1985 г., с.417) - аналог 1. Недостаток этих методов в том, что они позволяют определить присоединенные моменты инерции λ44 и демпфирования λ44 только при бортовых колебаниях судна (моделей) вокруг продольной горизонтальной оси, проходящей через центр его масс, причем только на одной частоте. Однако известно, что они зависят от частоты колебаний (частоты волн). Кроме того, этот метод не позволяет определить присоединенную массу λ33 и демпфирующую силу µ33 при горизонтальном действии волны в борт. А они также нужны при расчете воздействия волны на морские сооружения и качки судов.
Известен способ определения момента инерции модели судна, при котором оно подвешивается на гибком бифилярном тросике длиной l на воздухе, разворачивается на угол φ и отпускается (указанный выше справочник стр. 416). Под действием восстанавливающего момента модель совершает затухающие колебания, период которых т записывается. Момент инерции относительно вертикальной оси, проходящей через центр масс G определяется по формуле Iyy=Izz=Pa2τ2/(4π2l), где Р=gM - сила тяжести модели, a - расстояние между осью OY и бифилярами. На бифилярах можно раскачивать модель и в поперечном направлении и определять момент ее инерции относительно уровня закрепления бифиляров - аналог 2. Но этот аналог не позволяет определять силы и моменты присоединенной инерции и демпфирования в жидкости, т.к. в воде сила тяжести модели P уравновешивается силами ее плавучести PA=gρV, при этом восстанавливающих моментов не возникает, а поэтому и собственная качка моделей невозможна. Однако при определенной модернизации этого технического решения оно может быть применено и при колебаниях тела в воде.
Наиболее близким к предлагаемому техническому решению является устройство для определения положения центра масс и моментов инерции крупногабаритных объектов [2]. Оно включает платформу - носитель этих объектов, которая подвешивается на 4 цепях. Эту платформу предварительно взвешивают и методами статической тарировки на цепях определяют положение ее центра масс, а затем по колебаниям - ее момент инерции. На платформу ставится и закрепляется исследуемый объект, проводится статическая тарировка платформы с объектом и определяется известными методами положение центра масс объекта. Далее платформу с объектом отклоняют и отпускают. Ее затухающие колебания записывают и по периоду этих колебаний определяют момент инерции платформы с объектом. Зная собственные массу и момент инерции платформы, известными методами определяют момент инерции исследуемого объекта-прототипа. Недостаток прототипа - испытания проводятся на воздухе и на одной частоте, и, кроме того, это устройство не приспособлено к определению моментов инерции тел в воде.
Цель изобретения - расширение функциональных возможностей известных технических решений. Указанная цель достигается тем, что в известных технических решениях, включающих модель судна или другого тела, платформу для обеспечения их собственных колебаний вокруг неподвижных опор, аппаратуру для измерения угла отклонения платформы от равновесного положения и записи свободных ее колебаний во времени после отклонения и гидролоток, платформа выполнена в виде жесткой рамы, например, из металлических угольников, снабжена тарировочными грузами, к ней под разными углами снизу крепится модель, от рамы вертикально верх отходят 2 прочных раздвижных штанги, выполненных, например, из вложенных друг в друга п-образных профилей, нижние концы которых прочно, например, на сварке, соединены с рамой, а верхние - жестко соединены с осью, вместе с которой сама платформа с тарировочными грузами, вместе с моделью или еще с дополнительно принятыми грузами может колебаться в подшипниках на концах этой оси, вставляемых в специальные гнезда (концевики), располагающихся в фундаментной конструкции, каждая штанга платформы подкреплена укосами, придающими им устойчивость, фундаментальная конструкция опирается на стенки гидролотка или на собственные основания, от каждого опорного основания отходят вертикально вверх раздвижные штанги, например, из вложенных друг в друга п-образных профилей, подкрепленные укосами, верхняя часть раздвижных штанг имеет концевики, в которые вставляются подшипники качения или другого типа для оси платформы, обе части фундаментальной конструкции соединены, например, на болтах разъемными связями длиной, соответствующей ширине гидролотка, при этом гидролоток имеет смотровые окна и выполнен с возможностью оперативно изменять уровень затопления для обеспечения заданного уровня погружения модели в воду при ее подвеске к платформе.
На фиг.1 показан возможный вариант предлагаемого устройства. Оно включает:
- гидролоток 1 с прозрачными смотровыми окнами 2 и системами их осушения и заполнения на необходимый уровень (не показаны);
- испытуемую модель 3, имеющую в своем составе приспособление для прикрепления снизу к платформе (не показано).
- платформу, состоящую из жесткой рамы 4, сваренной из угольников, раздвижных штанг 5, выполненных, например, из вложенных друг в друга n-образных профилей, которые жестко нижними концами соединены, например, на сварке, с основанием платформы 4, подкреплены укосами 6 и перевязаны между собой перемычками 7, а верхними жестко соединены с горизонтальной осью 8, на ее концах закрепляются подшипники качения или призмы, на которых платформа качается в концевиках фундаментной конструкции, внутри рамы из угольников стационарно устанавливается тарировочное устройство, состоящее из тарировочных грузов mT, перемещаемых в поперечном направлении по направляющей, кроме того, предусматривается прием на платформу дополнительных грузов (не показано);
- фундаментную конструкцию, состоящую из 2-х оснований 11, из швеллера или n-профиля, опирающихся на стенки гидролотка (или на собственный фундамент), 2 раздвижных штанг 12, выполненных из вложенных друг в друга п-образных профиля, приваренных к основаниям и имеющих в верхних частях концевики 13, в которые после сборки вставляются и фиксируются опорные основания призм на оси или подшипники качения 8, при этом штанги 12 подкреплены укосами 13, а две части фундаментной конструкции соединяются на болтах перемычками 15;
- измерительный блок угловых колебаний платформы 10, присоединяемый к ее оси 8 и раздвижной штанге фундамента.
Две части фундаментной конструкции соединяются на болтах перемычками 14.
Предложенное устройство собирается и тарируется следующим образом:
1. Монтируется фундаментная конструкция: вначале на стенки гидролотка устанавливаются ее опорные части 11 со штангами 12, укосами 14 и соединяются перемычками 15.
2. Назначается высота подъема концевиков 13.
3. Назначается высота подъема оси 8 в раздвижных штангах 4 платформы.
4. Платформа в сборе взвешивается, определяется ее масса mпл, после чего она своими подшипниками 9 вставляется в концевики 13.
5. К оси платформы присоединяется измеритель [10] углов ее наклонения и закрепляется на штанге 12.
6. Производится статическая тарировка платформы. С этой целью тарировочные грузы, находящиеся в исходном положении посередине платформы, перемещаются на расстояния b1, b2, b3 от середины и фиксируются углы крена Θ1, Θ2, Θ3. Создаваемый кренящий момент сравнивается с восстанавливающим и находится удаление центра масс платформы от оси подвеса для разных bi
 и находится их математическое ожидание (lG). Измерив удаление основания платформы от оси подвеса l, находят удаление yG платформы от ее основания λG=l-lG.
и находится их математическое ожидание (lG). Измерив удаление основания платформы от оси подвеса l, находят удаление yG платформы от ее основания λG=l-lG.
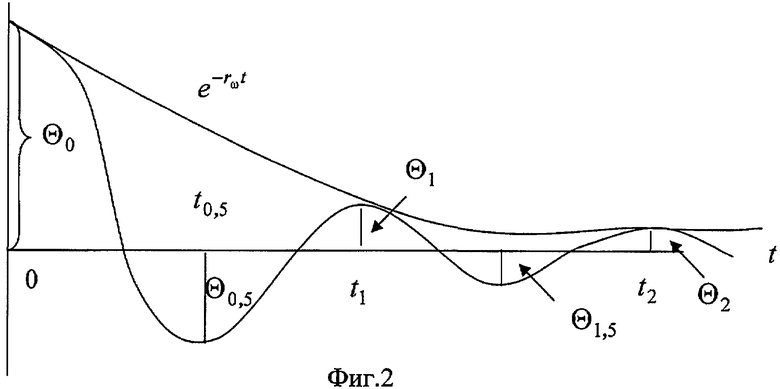
7. Определяется момент инерции собственно платформы относительно оси вращения. С этой целью вначале тарировочный груз выставляется в исходное положение, при котором крен Θ=0, затем платформа отклоняется и отпускается. Ее затухающие колебания типа фиг.2 записываются измерительным устройством.
Эти колебания идентифицируются дифференциальным уравнением физического маятника

где  ; кг м2 - момент инерции платформы на воздухе относительно оси подвеса;
; кг м2 - момент инерции платформы на воздухе относительно оси подвеса;
 - коэффициент момента сил трения платформы на воздухе;
- коэффициент момента сил трения платформы на воздухе;
 - восстанавливающий момент;
- восстанавливающий момент;
Уравнение (1) приводится к стандартному виду

где  - квадрат частоты собственных колебаний платформы без учета трения;
- квадрат частоты собственных колебаний платформы без учета трения;
 - коэффициент относительного демпфирования.
- коэффициент относительного демпфирования.
По кривой затухающих колебаний известными методами (Справочник по теории корабля «Статика судов. Качка корабля» т.2./ Под редакцией Я.И.Войткунского. - Л.: Судостроение, 1985, с.417) находятся период колебаний и логарифмический коэффициент их затухания. Поскольку на воздухе затухание пренебрежимо мало и 
После выполнения этого этапа предлагаемое устройство готово к работе. Работает предлагаемое устройство по назначению следующим образом:
1. Взвешивается модель и определяется известными методами положение ее центра масс по длине и высоте.
2. Модель присоединяется снизу к платформе и приводится на воздухе статическая тарировка платформы вместе с моделью. Для создания большего угла крена в дополнение к штатному тарировочному грузу может быть применен дополнительный в виде вынесенного за пределы гидролотка через блок на тросике дополнительных грузов или дополнительно загружаемого на платформу балластных грузов m0, которые после кренования остаются внутри платформы, не создавая крена. В результате может быть определен коэффициент восстанавливающего момента платформы вместе с моделью  . Из этого выражения находится удаление от оси вращения центра масс платформы вместе с моделью и может быть сделана дополнительная оценка положения по высотке центра масс модели.
. Из этого выражения находится удаление от оси вращения центра масс платформы вместе с моделью и может быть сделана дополнительная оценка положения по высотке центра масс модели.
3. Платформа с моделью на воздухе отклоняется на угол |Θ|≤15° и отпускается. Ее затухающие колебания записываются и по изложенной выше методике определяются суммарный момент инерции платформы с моделью и коэффициент воздушного сопротивления (демпфирования) и трения. С точки зрения экономии времени на проведение серии экспериментов с моделью в воде целесообразно предварительно провести серию экспериментов по качке платформы с моделью на разных длинах телескопических штанг и построить зависимость  ,
,  ,
,  .
.
4. Модель с помощью раздвижных штанг устанавливается на заданный в гидролотке уровень, на котором должна находиться ее ватерлиния. После этого гидролоток заполняется водой до указанного уровня.
5. Производится статическая тарировка платформы с моделью в воде и определяется суммарный восстанавливающий момент от остойчивости нагрузки платформы, а также остойчивости формы модели от ее наклонения на угол Θ при наклонении платформы  .
.
6. После этого платформа с моделью вручную отклоняется на угол Θ и отпускается. Ее затухающие колебания измеряются и записываются на регистрирующей аппаратуре, например компьютере.
Эти колебания идентифицируются уравнением

Оно приводится к аналогичному (2) виду

где  - частота собственных колебаний платформы с моделью без сопротивления;
- частота собственных колебаний платформы с моделью без сопротивления;
 - коэффициент относительного демпфирования всей системы.
- коэффициент относительного демпфирования всей системы.
Используя кривую затухающего процесса, аналогичную фиг.2, но с большей степенью затухания по методике, изложенной в [3], по периоду τ и декременту затухания находят частоту 
Тогда 

Вычитая из этих значений величины, свойственные только платформе с моделью на воздухе, можно найти чисто для модели значения  и
и  . Поскольку известно, что в жидкости и зависят от частоты и амплитуды колебаний, то колебания платформы с моделью необходимо производить на разных длинах ее подвеса и с разными балластными грузами mб.
. Поскольку известно, что в жидкости и зависят от частоты и амплитуды колебаний, то колебания платформы с моделью необходимо производить на разных длинах ее подвеса и с разными балластными грузами mб.
Частота колебаний 
где lб - удаление центра масс дополнительного балласта от оси подвеса;
 - удаление от оси подвеса центра масс всего комплекса. Рекомендуется вариацией длин подвески платформы и балласта добиться достаточно широкого диапазона частот (периодов) колебаний модели и построить функциональную зависимость
- удаление от оси подвеса центра масс всего комплекса. Рекомендуется вариацией длин подвески платформы и балласта добиться достаточно широкого диапазона частот (периодов) колебаний модели и построить функциональную зависимость 
 . Вычитая из этих суммарных зависимостей аналогичные зависимости по п.3 на воздухе при одинаковых частотах получают искомые зависимости присоединенного момента
. Вычитая из этих суммарных зависимостей аналогичные зависимости по п.3 на воздухе при одинаковых частотах получают искомые зависимости присоединенного момента  и коэффициента демпфирования
и коэффициента демпфирования  .
.
Учитывая малую кривизну траектории, по которой качается модель с платформой, от определенных присоединенных моментов инерции  и демпфирования N
и демпфирования N модели, можно перейти к силам присоединенной инерции и демпфирования
модели, можно перейти к силам присоединенной инерции и демпфирования
 где λпΣ - суммарное удаление от оси подвеса центра плавучести модели. В последующем можно уже перейти к безразмерным коэффициентам k
где λпΣ - суммарное удаление от оси подвеса центра плавучести модели. В последующем можно уже перейти к безразмерным коэффициентам k и r
и r .
.
Предложенное устройство существенно расширяет возможности способа свободных затухающих колебаний и по отношению к известным техническим решениям обладает целым рядом положительных преимуществ:
1. Оно снимает ограничение способа свободных затухающих колебаний и позволяет определять присоединенные массы и коэффициенты демпфирования на разных частотах, а не на одной собственной.
2. При применении методики [3] обработки результатов предложенное устройство будет давать результаты, адекватные устройствам вынужденных колебаний, отличаясь от него простотой и дешевизной.
3. Оно обладает универсальностью, т.к. позволяет к платформе крепить разные модели, причем под разными углами, и определять коэффициенты присоединенных масс и демпфирования для бортовой и килевой качки.
4. Позволяет имитировать в эксперименте угол волнового склона  , где A0 - амплитуда волны, а λ - ее длина. Например, на 5 баллах средняя амплитуда A0=1,4 м, а длина 45 м. Для нее αBC=0,195 рад=11° 2.
, где A0 - амплитуда волны, а λ - ее длина. Например, на 5 баллах средняя амплитуда A0=1,4 м, а длина 45 м. Для нее αBC=0,195 рад=11° 2.
Если удаление модели (не платформы) от оси подвеса 1,6 м, отклонение модели от вертикали равновесия должно быть 0,31 м, подвсплытие модели составит 3 см.
5. Условия обтекания модели в условиях ее качения более отвечают реальности по сравнению с измерением сил и моментов на закрепленной модели.
Все это позволяет считать, что предложенное техническое решение удовлетворяет критерию существенного положительного эффекта.
Оно отвечает также критерию технической реализуемости, т.к. для его изготовления используются известные и недефицитные детали.
Патентный поиск не выявил подобного технического решения. Поэтому оно отвечает критерию патентной новизны.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Справочник по теории корабля «Статика судов. Качка корабля» т.2/ Под редакцией Я.И.Войткунского. - Л.: Судостроение, 1985, стр.417-419.
2. Беляков О.А. «Определение моментов инерции крупногабаритных тел по колебаниям в упругом подвесе. Диссертация на соискание учетной степени кандидата физико-математических наук. - М.: МГУ им. М.В.Ломоносова, 2003.
3. Разумеенко Ю.В. Вопросы переноса гидродинамических коэффициентов, определенных методами затухающих колебаний, на колебания вынужденные или воздействие волн на подводные технические объекты. - М.: Изд. АН. «Механика твердого тела» №1, 1993.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПРИСОЕДИНЕННЫХ МАСС, МОМЕНТОВ ИНЕРЦИИ И ДЕМПФИРОВАНИЯ МОДЕЛЕЙ СУДОВ МЕТОДАМИ ИХ СВОБОДНЫХ КОЛЕБАНИЙ В ЖИДКОСТИ | 2009 |
|
RU2425343C1 |
| Установка для определения гидродинамических характеристик тела | 1990 |
|
SU1754570A2 |
| ПОЛУПОГРУЖНАЯ МОРСКАЯ ПЛАТФОРМА ПОВЫШЕННОЙ ВОЛНОСТОЙКОСТИ | 2001 |
|
RU2191132C1 |
| ПОЛУПОГРУЖЕННОЕ ОСНОВАНИЕ МОРСКОГО СООРУЖЕНИЯ | 1991 |
|
RU2011599C1 |
| ПОЛУПОГРУЖНОЕ ОСНОВАНИЕ МОРСКОГО СООРУЖЕНИЯ | 1992 |
|
RU2034738C1 |
| УСТРОЙСТВО ДЛЯ УМЕРЕНИЯ БОРТОВОЙ КАЧКИ МОРСКИХ СУДОВ С БОЛЬШОЙ ПОПЕРЕЧНОЙ ОСТОЙЧИВОСТЬЮ | 2006 |
|
RU2374124C2 |
| АВАРИЙНО-СИГНАЛЬНЫЙ РАДИОБУЙ ПОДВОДНОЙ ЛОДКИ | 2005 |
|
RU2287450C1 |
| ВОЛНОСТОЙКИЙ САМОХОДНЫЙ КАТАМАРАННЫЙ КОМПЛЕКС | 2008 |
|
RU2398705C2 |
| СУДОПОДЪЕМНЫЙ ПОНТОН | 1994 |
|
RU2123958C1 |
| ПЛАВ ДЛЯ ОСНАСТКИ ОРУДИЙ ЛОВА | 1994 |
|
RU2057442C1 |
Изобретение относится к измерительной технике и может быть использовано для определения присоединенных масс и демпфирования тел различной формы при их свободных затухающих колебаниях в жидкости. Устройство включает модель судна, платформу для обеспечения их собственных колебаний вокруг неподвижных опор, аппаратуру для измерения угла отклонения платформы от равновесного положения и записи свободных ее колебаний во времени после отклонения и гидролоток. Качка моделей осуществляется при помощи платформы, к которой они прикрепляются снизу. Платформа имеет телескопические раздвижные штанги, удерживающие на концах горизонтальную ось с подшипниками, вставляемые в концевики телескопических выдвижных штанг фундаментной конструкции, опирающейся на стенки гидролотка, выполненного с возможностью оперативного изменения уровня заполнения. Изменяя длину подвеса платформы и балласта, можно изменять частоту ее колебаний в воздухе и в воде. Искомые результаты получаются как разность моментов инерции и демпфирования конструкции в сборе в воде на разных частотах и на воздухе. Технический результат заключается в расширении функциональных возможностей устройства. 4 ил.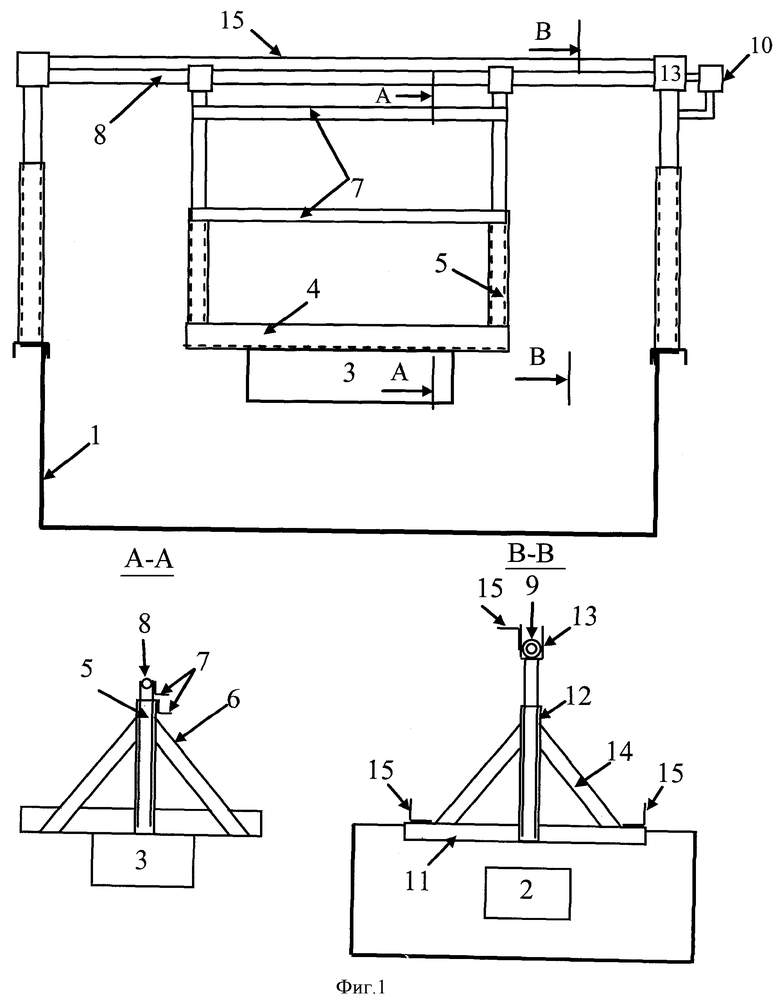
Устройство для определения сил присоединенной инерции и демпфирования тел методами их свободных затухающих колебаний в жидкости, включающее модель судна или другого тела, платформу для обеспечения их собственных колебаний вокруг неподвижных опор, аппаратуру для измерения угла отклонения платформы от равновесного положения и записи свободных ее колебаний во времени после отклонения и гидролоток, отличающееся тем, что платформа выполнена в виде жесткой рамы, например из металлических угольников, снабжена тарировочными грузами, к ней под разными углами снизу крепится модель, от рамы вертикально верх отходят две прочные раздвижные штанги, выполненные, например, из вложенных друг в друга п-образных профилей, нижние концы которых прочно, например на сварке, соединены с рамой, а верхние - жестко соединены с осью, вместе с которой сама платформа с тарировочными грузами вместе с моделью или еще с дополнительно принятыми грузами может колебаться в подшипниках на концах этой оси, вставляемых в специальные гнезда (концевики), располагающиеся в фундаментной конструкции, каждая штанга платформы подкреплена укосами, придающими им устойчивость, фундаментальная конструкция опирается на стенки гидролотка или на собственные основания, от каждого опорного основания отходят вертикально вверх раздвижные штанги, например, из вложенных друг в друга п-образных профилей, подкрепленные укосами, верхняя часть раздвижных штанг имеет концевики, в которые вставляются подшипники, установленные на оси платформы, обе части фундаментальной конструкции соединены, например, на болтах разъемными связями длиной, соответствующей ширине гидролотка, при этом гидролоток имеет смотровые окна и выполнен с возможностью оперативно изменять уровень затопления для обеспечения заданного уровня погружения модели в воду при ее подвеске к платформе.
| БЕЛЯКОВ О.А | |||
| Определение моментов инерции крупногабаритных тел по колебаниям в упругом подвесе | |||
| Диссертация на соискание ученой степени кандидата физико-математических наук | |||
| - М.: МГУ им | |||
| М.В.Ломоносова, 2003 | |||
| Справочник по теории корабля «Статика судов | |||
| Качка корабля» | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Я.И.Войткунского | |||
| - Л.: Судостроение, 1985, стр.417-419. | |||

