По настоящей заявке на патент испрашивается приоритет по дате подачи предварительной заявки США №60/802,682, озаглавленной "JACOBI ITERATIONS FOR EIGENVECTOR DECOMPOSITION AND FEEDBACK REDUCTION", поданной 22 мая 2006, права на которую принадлежат заявителю этой заявки и включенной в этот документ по ссылке.
Область техники, к которой относится изобретение
Настоящее изобретение, в целом, относится к связи, а более конкретно к способам для отправки обратной связи для передачи с многоканальным входом многоканальным выходом (MIMO).
Уровень техники
В системе беспроводной связи передатчик может использовать множество (T) передающих антенн для передачи данных приемнику, оборудованному множеством (R) приемных антенн. Множество передающих и приемных антенн формируют канал MIMO, который можно использовать для увеличения пропускной способности и/или улучшения надежности. Например, передатчик может передавать до T потоков данных одновременно из T передающих антенн для улучшения пропускной способности. В качестве альтернативы, передатчик может передавать один поток данных из всех T передающих антенн для улучшения приема приемником.
Хороших характеристик (например, высокой пропускной способности) можно достичь посредством передачи данных на собственных модах канала MIMO. Собственные моды можно рассматривать как ортогональные пространственные каналы. Приемник может оценивать характеристики канала MIMO, получать матрицу управления передачей на основе матрицы характеристик канала MIMO и отправлять матрицу управления передачей передатчику. Далее передатчик может выполнять пространственную обработку посредством матрицы управления передачей для отправки данных на собственных модах.
Для отправки матрицы управления передачей из приемника в передатчик используют ценные ресурсы радиосвязи. Следовательно, в данной области техники существует потребность в эффективных способах отправки матрицы управления передачей для уменьшения служебной информации.
Сущность изобретения
В этом документе описаны эффективные способы получения матрицы управления передачей и отправки обратной связи для этой матрицы. В одной схеме, приемник может определять набор параметров, определяющих матрицу управления передачей, которая должна быть использована для передачи из передатчика в приемник. Приемник может получать матрицу управления передачей на основе множества матриц преобразования, которые могут использоваться для множества итераций вращения Якоби для обнуления недиагональных элементов матрицы канала. Приемник может определять набор параметров на основе матриц преобразования. Набор параметров может содержать, по меньшей мере, один угол, по меньшей мере, одно значение, по меньшей мере, один индекс и т.д. для каждой матрицы преобразования. Приемник может отправлять набор параметров, определяющих матрицу управления передачей (вместо элементов матрицы управления передачей), в передатчик для использования передатчиком для получения матрицы управления передачей.
Ниже более подробно описаны различные аспекты и признаки раскрытия.
Краткое описание чертежей
На фиг.1 представлена блок-схема точки доступа и терминала.
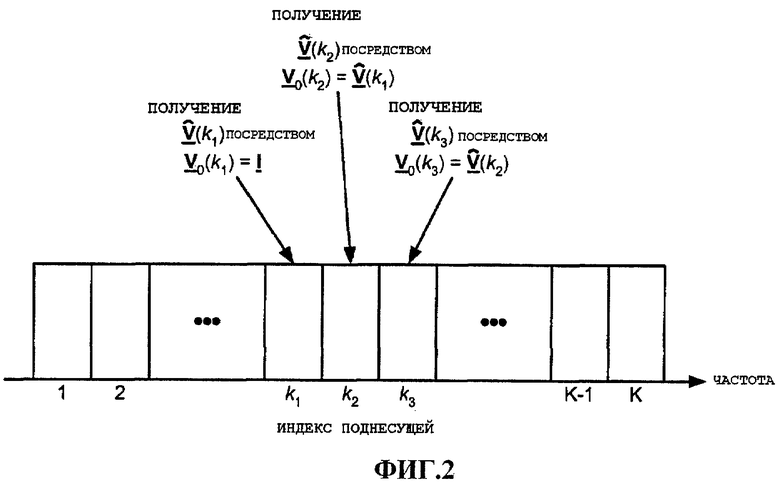
На фиг.2 изображено разложение по собственным значениям для множества поднесущих.
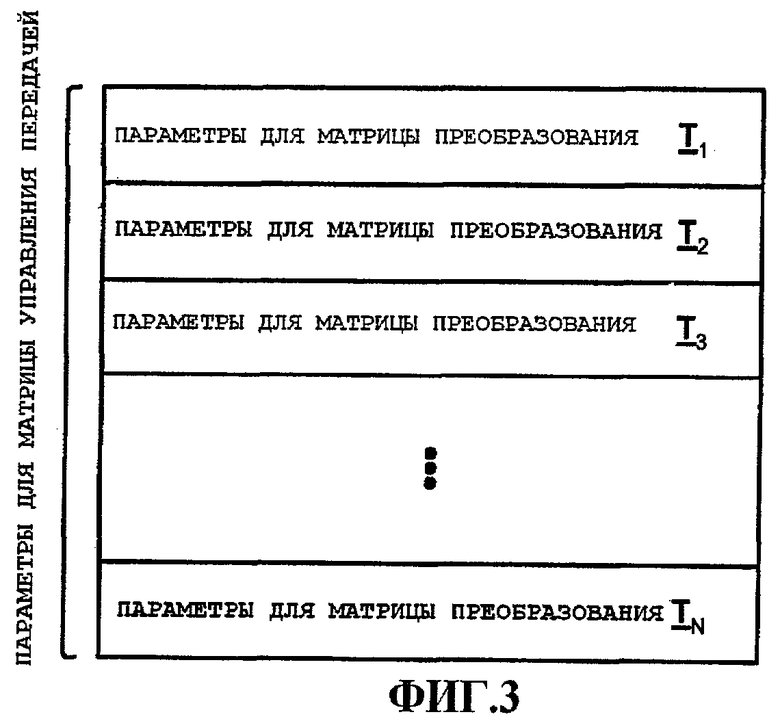
На фиг.3 изображена обратная связь матрицы управления передачей.
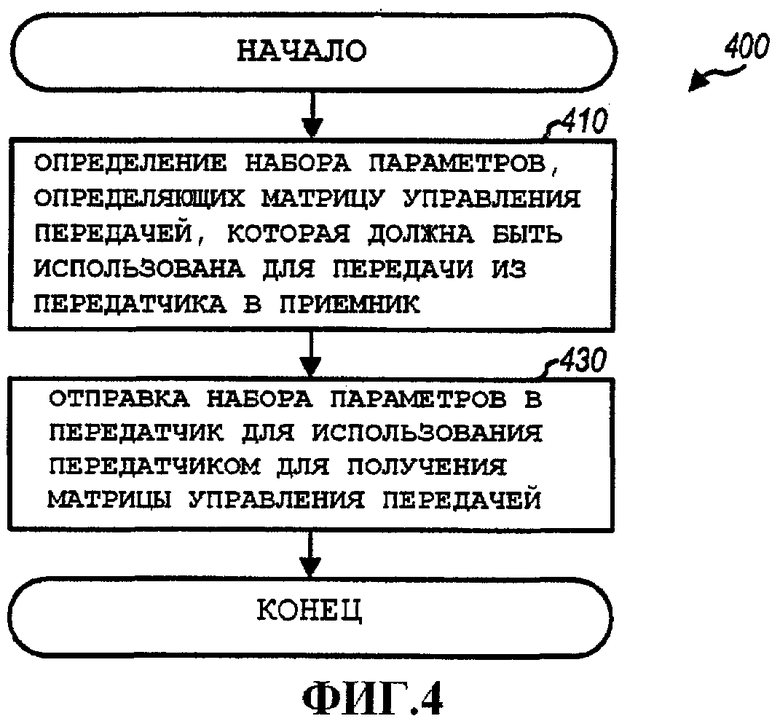
На фиг.4 представлен процесс, выполняемый приемником.
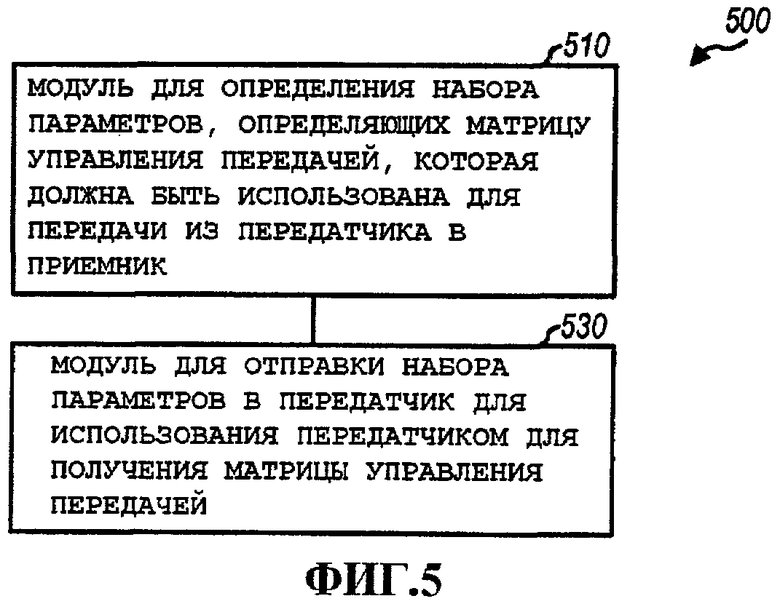
На фиг.5 представлено устройство приемника.
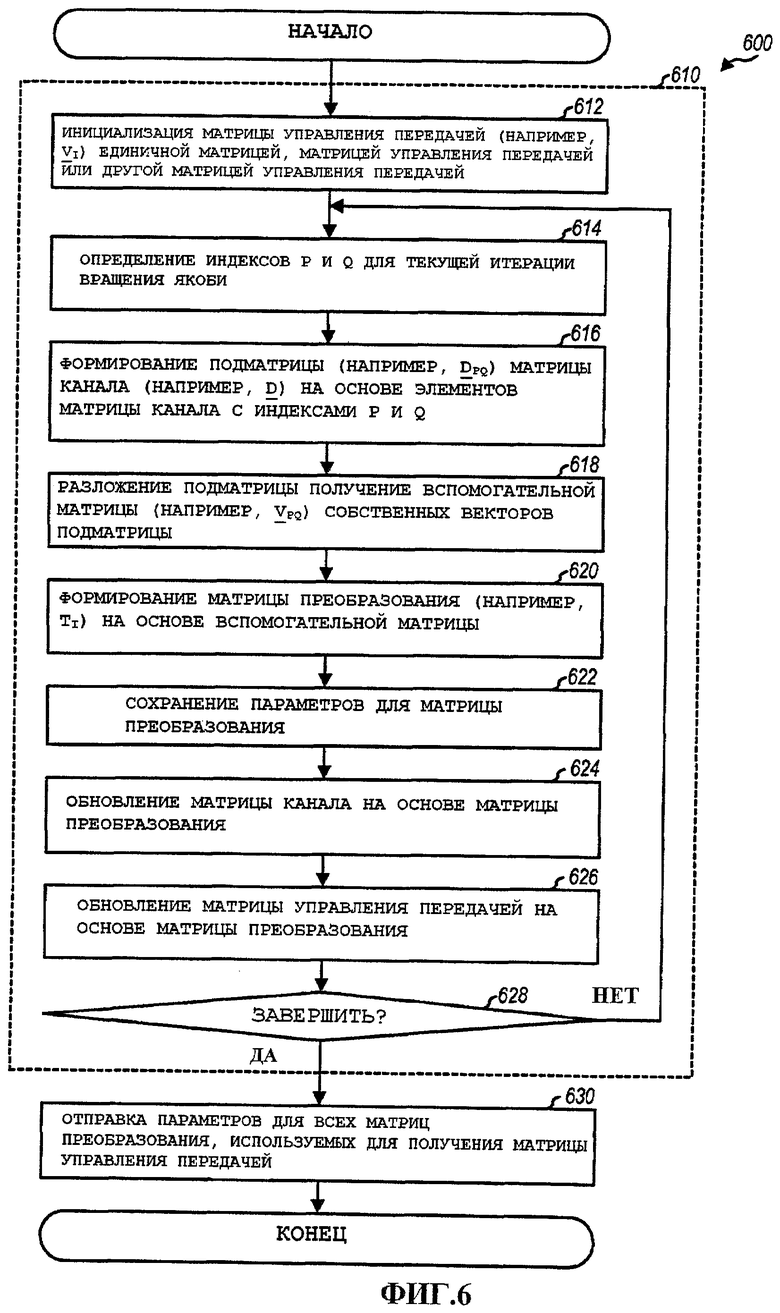
На фиг.6 представлен другой процесс, выполняемый приемником.
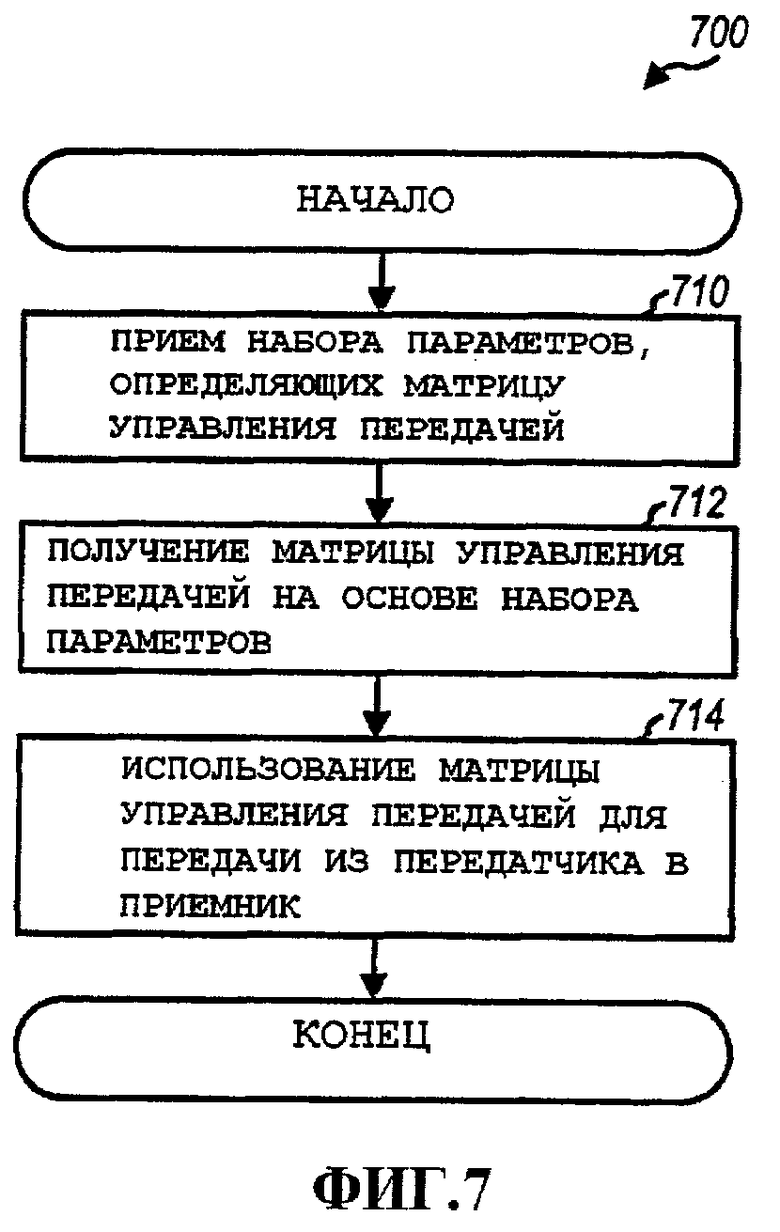
На фиг.7 представлен процесс, выполняемый передатчиком.
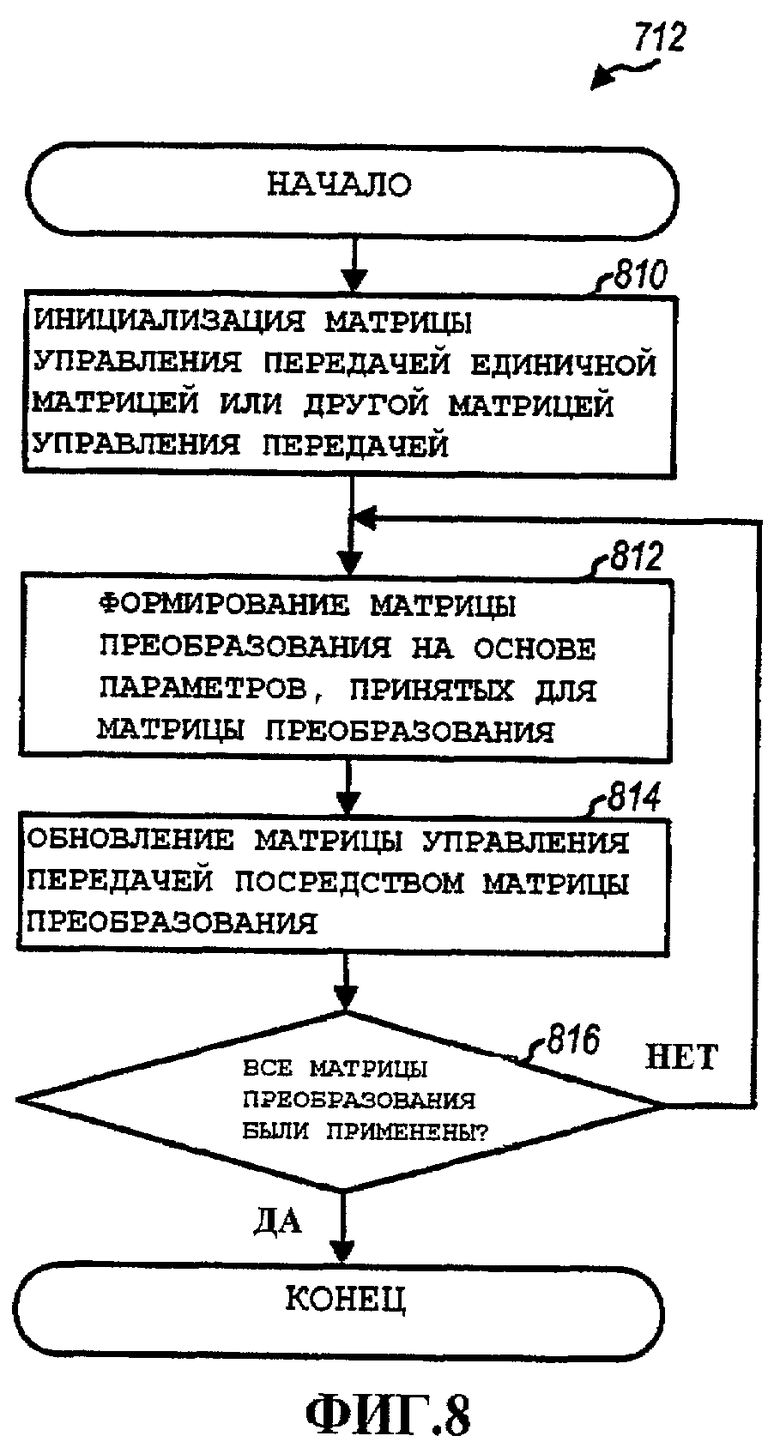
На фиг.8 представлен процесс получения передатчиком матрицы управления передачей.
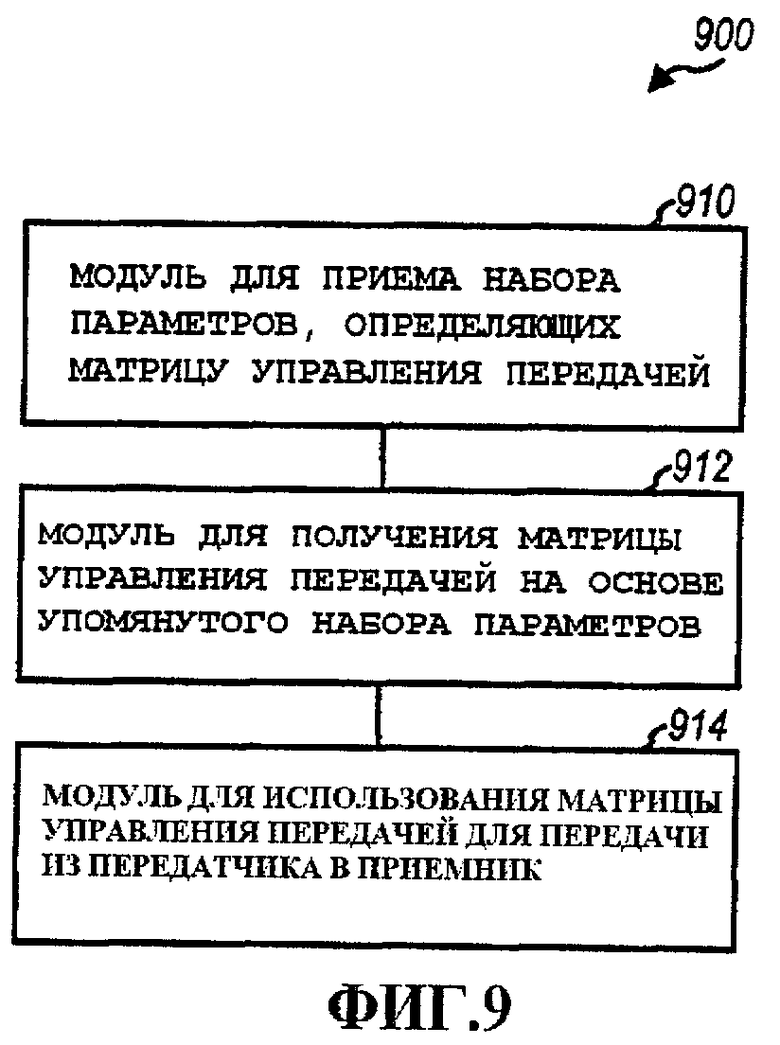
На фиг.9 представлено устройство передатчика.
Подробное описание
Способы, описанные в этом документе, можно использовать для различных беспроводных сетей связи, например беспроводных региональных сетей (WWAN), беспроводных сетей масштаба города (WMAN), беспроводных локальных сетей (WLAN) и т.д. Термины "сеть" и "система" часто используются как синонимы. Упомянутые способы также можно использовать для различных схем множественного доступа, например множественного доступа с частотным разделением (FDMA), множественного доступа с кодовым разделением (CDMA), множественного доступа с временным разделением (TDMA), множественного доступа с пространственным разделением (SDMA), ортогонального FDMA (OFDMA), одночастотного FDMA (SC-FDMA) и т.д. Система OFDMA использует мультиплексирование с ортогональным частотным разделением (OFDM). Система SC-FDMA использует одночастотное мультиплексирование с частотным разделением (SC-FDM). OFDM и SC-FDM разделяет полосу пропускания системы на множество (K) ортогональных поднесущих, которые также называются тонами, элементами кодированного сигнала и т.д. Каждая поднесущая может быть модулирована данными. В общем, символы модуляции в частотной области отправляют посредством OFDM и во временной области посредством SC-FDM. В системе OFDMA может быть реализована радиотехнология, например долгосрочное развитие (LTE), ультрамобильная широкополосная связь (Ultra Mobile Broadband, UMB), IEEE 802.20, IEEE 802.16 (также называемая WiMAX), IEEE 802.11 (также называемая Wi-Fi), флэш-OFDM (Flash-OFDM®) и т.д. Эти различные радиотехнологии и стандарты известны в данной области техники.
На фиг.1 представлена блок-схема модели точки 110 доступа и терминала 150 в беспроводной сети связи. Точка доступа является станцией, которая обменивается информацией с терминалами. Точку доступа также можно называть базовой станцией, узлом B, усовершенствованным узлом B (eNode B) и т.д., и она может содержать некоторые или все их функциональные возможности. Терминал можно также называть подвижной станцией, абонентским оборудованием, терминалом доступа, терминалом пользователя, абонентским пунктом, станцией и т.д., и он может содержать некоторые или все их функциональные возможности. Терминал 150 может быть сотовым телефоном, персональным цифровым секретарем (PDA), устройством радиосвязи, малогабаритным устройством, радиомодемом, ноутбуком, беспроводным телефоном и т.д. Точка 110 доступа оборудована множеством (Nap) антенн, которые могут использоваться для приема и передачи данных. Терминал 150 оборудован множеством (Nut) антенн, которые могут использоваться для приема и передачи данных.
По нисходящей линии связи, в точке 110 доступа, процессор 114 данных передатчика (TX) может принимать данные трафика из источника 112 данных и/или другие данные из контроллера/процессора 130. Процессор 114 данных TX может обрабатывать (например, форматировать, кодировать, перемежать и отображать в символы) принятые данные и формировать символы данных, которые являются символами модуляции для данных. Пространственный процессор 120 TX может мультиплексировать символы данных с символами пилот-сигнала, выполнять пространственную обработку передатчика посредством одной или нескольких матриц управления передачей по нисходящей линии связи (DL) и обеспечивать Nap выходных потоков символов в Nap модуляторов (MOD) с 122a по 122ap. Каждый модулятор 122 может обрабатывать свой выходной поток символов (например, для OFDM, SC-FDM, CDMA и т.д.) для формирования выходного потока элементарных посылок. Каждый модулятор 122 может также преобразовывать (например, преобразовывать в аналоговое представление, усиливать, фильтровать и преобразовывать с повышением частоты) свой выходной поток элементарных посылок для формирования сигнала нисходящей линии связи. Nap сигналов нисходящей линии связи, из модуляторов с 122a по 122ap, могут быть переданы из антенн с 124a по 124ap соответственно.
В терминале 150, Nut антенн с 152a по 152ut могут принимать сигналы по нисходящей линии связи из точки 110 доступа, и каждая антенна 152 может обеспечивать принятый сигнал в соответствующий демодулятор (DEMOD) 154. Каждый демодулятор 154 может выполнять обработку, комплементарную к обработке, выполняемой модуляторами 122, и обеспечивать принятые символы. Пространственный процессор 160 приемника (RX) может выполнять пространственную согласованную фильтрацию принятых символов из всех демодуляторов с 154a по 154ut и обеспечивать оценки символов данных, которые являются оценками символов данных, переданных точкой 110 доступа. Процессор 170 данных RX также может обрабатывать (например, отображать из символов, устранять перемежение и декодировать) оценки символов данных и обеспечивать декодированные данные в приемник 172 данных и/или контроллер/процессор 180.
Процессор 178 канала может обрабатывать символы пилот-сигнала, принятые по нисходящей линии связи из точки 110 доступа, и может оценивать характеристики канала MIMO нисходящей линии связи. Процессор 178 может выполнять разложение матрицы характеристик канала нисходящей линии связи для каждой представляющей интерес поднесущей, как описано ниже, для получения матрицы управления передачей DL и собственных значений для этой поднесущей. Процессор 178 также может получать матрицу пространственного фильтра DL для каждой представляющей интерес поднесущей на основе матрицы управления передачей и собственных значений для этой поднесущей. Процессор 178 может обеспечивать матрицы пространственного фильтра для DL в пространственный процессор 160 RX для пространственной согласованной фильтрации для нисходящей линии связи и может обеспечивать матрицы управления передачей по DL в контроллер/процессор 180 для обратной связи в точку 110 доступа.
Обработка для восходящей линии связи может быть идентичной обработке для нисходящей линии связи или отличаться от нее. Данные трафика из источника 186 данных и/или другие данные из контроллера/процессора 180 можно обрабатывать (например, кодировать, перемежать и модулировать) посредством процессора 188 данных TX и мультиплексировать с символами пилот-сигнала и выполнять их пространственную обработку посредством пространственного процессора 190 TX посредством одной или нескольких матриц управления передачей для восходящей линии связи (UL). Выходные символы из пространственного процессора 190 TX также можно обрабатывать посредством модуляторов с 154a по 154ut для формирования Nut сигналов восходящей линии связи, которые могут быть переданы через антенны с 152a по 152ut.
В точке 110 доступа, сигналы восходящей линии связи из терминала 150 могут быть приняты антеннами с 124a по 124ap и обработаны демодуляторами с 122a по 122ap для получения принятых символов. Пространственный процессор 140 RX может выполнять пространственную согласованную фильтрацию принятых символов и обеспечивать оценки символов данных. Процессор 142 данных RX также может обрабатывать оценки символов данных и обеспечивать декодированные данные в приемник 144 данных и/или контроллер/процессор 130.
Процессор 128 канала может обрабатывать символы пилот-сигнала, принятые по восходящей линии связи из терминала 150, и может оценивать характеристики канала MIMO восходящей линии связи. Процессор 128 может выполнять разложение матрицы характеристик канала восходящей линии связи для каждой представляющей интерес поднесущей для получения матрицы управления передачей по UL и собственных значений для этой поднесущей. Процессор 128 также может получать матрицу пространственного фильтра для UL для каждой представляющей интерес поднесущей. Процессор 128 может обеспечивать матрицы пространственного фильтра UL в пространственный процессор 140 RX для пространственной согласованной фильтрации восходящей линии связи и может обеспечивать матрицы управления передачей UL в контроллер/процессор 130 для обратной связи в терминал 150.
Контроллеры/процессоры 130 и 180 могут управлять упомянутой операцией в точке 110 доступа и терминале 150 соответственно. В памяти 132 и 182 могут храниться данные и коды программ для точки 110 доступа и терминала 150 соответственно.
Способы, описанные в этом документе, можно использовать для передачи MIMO по нисходящей линии связи, а также по восходящей линии связи. Упомянутые способы могут выполняться терминалом 150 для получения матриц управления передачей для нисходящей линии связи и отправки этих матриц в точку 110 доступа для передачи MIMO по нисходящей линии связи. Упомянутые способы также могут выполняться точкой 110 доступа для получения матриц управления передачей для восходящей линии связи и отправки этих матриц в терминал 150 для передачи MIMO по восходящей линии связи.
Канал MIMO, сформированный множеством (T) передающих антенн в передатчике и множеством (R) приемных антенн в приемнике, может характеризоваться матрицей H характеристик канала RxT, которая может быть задана как:
где элемент hi,j, для i=1,...,R и j=l,...,T, обозначает коэффициент усиления соединительного или комплексного канала между передающей антенной j и приемной антенной i. Для передачи по нисходящей линии связи, точка 110 доступа является передатчиком, терминал 150 является приемником, T=Nap и R=Nut. Для передачи по восходящей линии связи, терминал 150 является передатчиком, точка 110 доступа является приемником, T=Nut и R=Nap.
Для получения множества (S) собственных мод H, где S≤min{T,R}, можно диагонализировать матрицу H характеристик канала. Эта диагонализация может быть достигнута посредством разложения корреляционной матрицы H по собственным значениям.
Разложение по собственным значениям может быть выражено как:

где R - корреляционная матрица H, T×T,
V - унитарная матрица, T×T, столбцами которой являются собственные векторы R,
Λ - диагональная матрица, T×T, собственных значений R, и
"H" обозначает сопряжение матрицы.
Унитарная матрица V характеризуется свойством V H V=I, где I - единичная матрица. Столбцы унитарной матрицы ортогональны друг другу, и каждый столбец имеет единичную мощность. Диагональная матрица Λ может содержать ненулевые значения вдоль диагонали и остальные нули. Диагональные элементы Λ являются собственными значениями R. Эти собственные значения представляют коэффициенты усиления по мощности S собственных мод. R является эрмитовой матрицей, недиагональные элементы которой обладают следующим свойством: ri,j=r* j,i, где "*" обозначает комплексное сопряжение.
Передатчик может выполнять пространственную обработку передатчика на основе собственных векторов в V для передачи данных на собственных модах H следующим образом:
x=Vs,(3)
где s - вектор, T×1, с S символами данных, которые должны быть отправлены на S собственных модах, и
x - вектор, T×1, с T выходными символами, которые должны быть отправлены из T передающих антенн.
Пространственная обработка в уравнении (3) может также называться формированием луча, прекодированием и т.д. Передатчик может также выполнять управление лучом посредством (i), масштабирования каждого элемента V для получения матрицы  с элементами единичной амплитуды и (ii) выполнения пространственной обработки передатчика посредством вместо V. В любом случае, формирование луча и управление лучом могут обеспечивать лучшие характеристики, чем просто передача данных из T передающих антенн без какой-либо пространственной обработки.
с элементами единичной амплитуды и (ii) выполнения пространственной обработки передатчика посредством вместо V. В любом случае, формирование луча и управление лучом могут обеспечивать лучшие характеристики, чем просто передача данных из T передающих антенн без какой-либо пространственной обработки.
Приемник может получать принятые символы из R приемных антенн, которые могут быть выражены как:

где r - вектор, R×1, с R символами, принятыми из R приемных антенн, и
n - вектор шума, R×1.
Приемник может выполнять пространственную согласованную фильтрацию принятых символов следующим образом:

где  - вектор, T×1, оценок символов данных, которые являются оценками символов данных в s. Приемник также может выполнять пространственную обработку приемника другими способами.
- вектор, T×1, оценок символов данных, которые являются оценками символов данных в s. Приемник также может выполнять пространственную обработку приемника другими способами.
Как показано в уравнении (3), матрица V может быть использована передатчиком для пространственной обработки для передачи данных. Как показано в уравнении (5), матрица V может также быть использована приемником для пространственной обработки для приема данных. V может быть получена посредством разложения R по собственным значениям или разложения H по сингулярным числам матрицы.
Разложение по собственным значениям комплексной эрмитовой матрицы R, T×T, может быть выполнено посредством итерационного процесса, при котором каждый раз используется вращение Якоби для обнуления недиагональных элементов в R. Вращение Якоби также обычно называют методом Якоби, преобразованием Якоби и т.д. Для комплексной эрмитовой матрицы, 2×2, достаточно одной итерации вращения Якоби для получения двух собственных векторов и двух собственных значений для этой матрицы. Для комплексной эрмитовой матрицы большей размерности, больше чем 2×2, для получения собственных векторов и собственных значений для комплексной матрицы большей размерности в итерационном процессе выполняется множество итераций вращения Якоби.
В следующем описании, индекс i обозначает номер итерации и инициализируется как i=0. R является эрмитовой матрицей, T×T, которая должна быть разложена, где T>2. Матрица D, TxT, является аппроксимацией диагональной матрицы Λ собственных значений R и может быть инициализирована как D 0=R. Матрица V i, TxT, является приближением матрицы V собственных векторов R и может быть инициализирована как V 0=I
Одна итерация вращения Якоби для обновления матриц D i и V i может быть выполнена следующим образом. Сначала может быть сформирована эрмитова матрица D pq на основе текущей D i следующим образом:

где dpq - элемент в положении (p,q) в D i.
D pq - подматрица D i, 2×2. Четыре элемента D pq являются четырьмя элементами в положениях (p,p), (p,q), (q,p) и (q,q) в D i. Индексы p и q могут быть выбраны так, как описано ниже.
Для получения унитарной матрицы V pq, 2×2, собственных векторов D pq может быть выполнено разложение по собственным значениям D pq. Элементы V pq могут быть вычислены непосредственно из элементов D pq следующим образом:










где d - амплитуда dpq, ∠dpq - фаза dpq, g1 - комплексное значение и c и s - вещественные значения с единичной мощностью, или c2+s2=l.
Набор уравнений (7) выполняет вращение Якоби эрмитовой матрицы D pq, 2x2, для получения матрицы V pq собственных векторов D pq. Вычисления в наборе уравнений (7) предназначены во избежание тригонометрических функций, например арктангенс, косинус и синус.
Матрица преобразования T i, TxT, может быть сформирована посредством матрицы V pq. T i является единичной матрицей, четыре элемента которой в положениях (p,p), (p,q), (q,p), (q,q) заменены соответственно на элементы (1,1), (1,2), (2,1) и (2,2) V pq. T i имеет следующий вид:
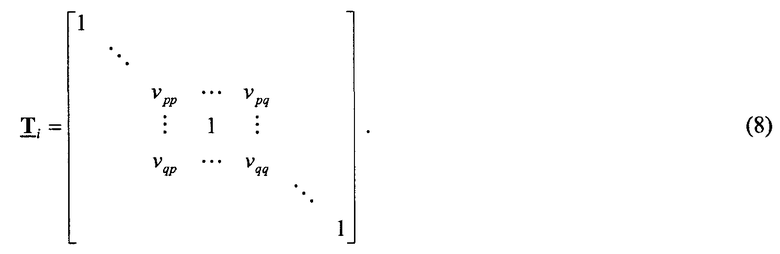
Все другие недиагональные элементы T i, не показанные в уравнении (8), являются нулями. Уравнения (7j) и (7k) указывают, что T i является комплексной матрицей, содержащей комплексные значения для vqp и vqq.
Матрица D i может быть обновлена следующим образом:

В уравнении (9) выполняется вращение Якоби T i для обнуления двух недиагональных элементов dpq и dqp в положениях (p,q) и (q,p) в D i. Посредством упомянутого вычисления можно изменять значения других недиагональных элементов в D i.
Матрица V i может также быть обновлена следующим образом:

V i - кумулятивная матрица преобразования, которая содержит все матрицы преобразования T i, используемые на D i.
Матрица преобразования Ti может также быть выражена как произведение (i) диагональной матрицы с T-1 единичными элементами и одним комплексным элементом и (ii) вещественной матрицы с T-2 единицами вдоль диагонали, двумя вещественными диагональными элементами, двумя вещественными недиагональными элементами и остальными нулями. Например, для p=1 и q=2, T i может быть выражена как:
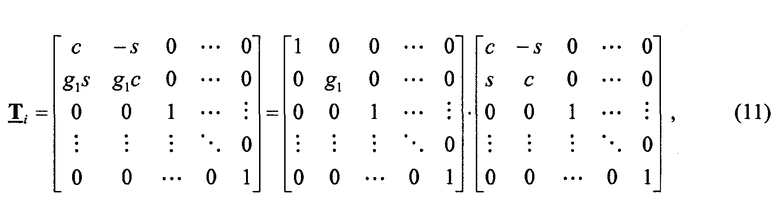
где g1 - комплексное значение, и c и s - вещественные значения, заданные в наборе уравнений (7).
Каждая итерация вращения Якоби обнуляет два недиагональных элемента D i. Для обнуления всех недиагональных элементов D i для различных значений индексов p и q может быть выполнено множество итераций вращения Якоби. Индексы p и q могут выбираться различными способами.
В одной схеме, для каждой итерации можно идентифицировать наибольший недиагональный элемент D i и обозначать его dpq. Итерация может далее быть выполнена с D pq, содержащей этот наибольший недиагональный элемент dpq и три других элемента в положениях (p,p), (q,p) и (q,q) в D i. Итерационный процесс может быть выполнен для любого количества итераций, пока не будет выполнено условие завершения. Условие завершения может быть выполнением предопределенного количества итераций, удовлетворением критерию ошибок и т.д. Например, можно вычислять и сравнивать суммарную ошибку или мощность всех недиагональных элементов D i с порогом ошибок, и итерационный процесс можно завершать, если суммарная ошибка ниже порога ошибок.
В другой схеме, индексы p и q можно выбирать предопределенным способом, например посредством перебора всех возможных значений этих индексов. Один перебор всех возможных значений индексов p и q может быть выполнен следующим образом. Индекс p можно пошагово изменять от 1 до T-1 с единичными приращениями. Для каждого значения p, индекс q можно пошагово изменять от p+l до T с единичными приращениями. Для обновления D i и V i итерацию вращения Якоби можно выполнять для каждой комбинации значений p и q, как описано выше. Для заданной комбинации значений p и q, вращение Якоби для обновления D i и V i может быть пропущено, если амплитуда недиагональных элементов в положениях (p,q) и (q,p) в D i ниже предопределенного порога.
Перебор состоит из T(T-1)/2 итераций вращения Якоби для обновления D i и V i для всех возможных значений p и q. Каждая итерация вращения Якоби обнуляет два недиагональных элемента D i, но может изменять другие элементы, которые могли быть обнулены ранее. В результате перебора индексов p и q должна уменьшиться амплитуда всех недиагональных элементов D i так, что D i будет приближением диагональной матрицы Λ. V i содержит аккумуляцию всех матриц преобразования, которые все вместе дают D i. Соответственно, V i является приближением V, так как D i является приближением Λ. Для получения все более точных приближений V и Λ может быть выполнено любое количество переборов.
Независимо от того, как могут выбираться индексы p и q, после завершения итерационного процесса конечная V
i является хорошим приближением V и обозначается  , и конечная D
i является хорошим приближением Λ и обозначается
, и конечная D
i является хорошим приближением Λ и обозначается  . Столбцы можно использовать как собственные векторы R, и диагональные элементы можно использовать как собственные значения R.
. Столбцы можно использовать как собственные векторы R, и диагональные элементы можно использовать как собственные значения R.
В другой схеме, итерационный процесс для получения может быть выполнен на основе разложения по сингулярным числам матрицы H. Для этой схемы, матрица V
i, T×T, является приближением V и может быть инициализирована как V
0=I. Матрица W
i , R×T, может быть инициализирована как W
0=H.
Одна итерация вращения Якоби для обновления матриц V i и W i может быть выполнена следующим образом. Сначала эрмитова матрица M pq, 2×2, может быть сформирована на основе текущей W i. M pq является подматрицей W i H W i, 2×2, и содержит четыре элемента в положениях (p,p), (p,q), (q,p) и (q,q) в W i H W i. M pq может быть разложена, например, как показано в наборе уравнений (7), для получения матрицы V pq, 2×2. Матрица преобразования T i может быть сформирован на основе V pq, как показано в уравнении (8). Далее матрица V i может быть обновлена посредством T i, как показано в уравнении (10). Матрица W i может также быть обновлена на основе T i следующим образом:
W i+1 = W i T i . (12)
Итерационный процесс может выполняться, пока не будет выполнено условие завершения. Для каждой итерации, индексы p и q можно выбирать в зависимости от наибольшего элемента в W i или в предопределенном порядке.
И для разложения по собственным значениям, и для разложения по сингулярным числам матрицы приемник может отправлять назад все T·T комплексных элементов в в передатчик. Если каждый комплексный элемент квантуют посредством b битов для вещественной части и b битов для мнимой части, то приемник может отправлять всю посредством 2b·T·T битов.
В аспекте, приемник может отправлять назад параметры, определяющие вместо элементов . Как показано в уравнении (10), неотъемлемой частью итерационного процесса получения является представление как произведения матриц преобразования. Каждая матрица преобразования T
i может быть сформирована на основе простой унитарной матрицы V
pq, 2×2. Каждая унитарная матрица 2×2 включает в себя одно комплексное значение g1 и два вещественных значения c и s. Каждая матрица преобразования может быть определена одним комплексным значением g1, двумя вещественными значениями c и s и значениями индексов p и q, если эти индексы не выбираются предопределенным способом. Параметры, определяющие T
i, могут быть отправлены в меньшем количестве битов, чем комплексные элементы .
В одной схеме, значения элементов каждой матрицы преобразования T
i могут квантоваться и отправляться назад. Например, для каждой T
i вещественные и мнимые части g1, каждая может быть отправлена посредством b битов, c может быть отправлена посредством b битов и s может быть отправлена посредством b битов, или в общей сложности (посредством) 4b битов. В общем, g1 может быть отправлена с идентичным или другим разрешением, что и c и s. Если значения индексов p и q не известны заранее передатчику, то для передачи значений p и q могут быть использованы  битов. Например, если R является матрицей 4×4, то существует шесть возможных комбинаций значений p и q, которые могут быть переданы посредством l=3 битов.
битов. Например, если R является матрицей 4×4, то существует шесть возможных комбинаций значений p и q, которые могут быть переданы посредством l=3 битов.
В другой схеме, могут квантоваться углы элементов каждой матрицы преобразования X и назад можно отправлять два вещественных параметра угла. Как показано в наборе уравнений (7), c и s можно вычислять как функции только τ даже несмотря на то, что для упрощения записи используются промежуточные значения x и t. Так как │τ│ изменяется от 0 до ∞, то с изменяется от 0,707 до 1,0, и s изменяется от 0,707 до 0,0. Кроме того, так как  , то c и s могут быть заданы углом θ между 0 и 45 градусами или от 0 до π/4. Соответственно, c может быть задано как c=cosθ, и s может быть задано как s=sinθ, для 0≤θ≤π/4. Аналогично, g1 может быть задано углом dpq или
, то c и s могут быть заданы углом θ между 0 и 45 градусами или от 0 до π/4. Соответственно, c может быть задано как c=cosθ, и s может быть задано как s=sinθ, для 0≤θ≤π/4. Аналогично, g1 может быть задано углом dpq или  , который является углом между 0 и 360 градусами или от 0 до 2π.
, который является углом между 0 и 360 градусами или от 0 до 2π.
В одной схеме, каждая матрица преобразования T i может быть задана (i) знаком (dqq-dpp), который определяет вид V pq, как показано в уравнениях (7j) и (7k), (ii) углом φ для комплексного значения g1 и (iii) углом θ для вещественных значений c и s. Для задания знака (dqq-dpp) может быть использован один бит. Количество битов, используемых для квантования углов φ и θ, может выбираться на основе того, какая ошибка квантования приемлема для требуемых характеристик системы.
В одной схеме, угол φ для g1 и угол θ для c и s задаются с равномерным квантованием. В этой схеме, для задания угла φ для g1 в диапазоне от 0 до 2π может быть использовано b битов, и для задания угла θ для c и s в диапазоне от 0 до π/4 может быть использовано b-3 битов. Тогда количество битов для отправки каждой T
i может быть задано как b+(b-3)+1=2b-2. Например, для квантования углов φ и θ до 32 равноотстоящими углами, от 0 до 2π, может быть использовано b=5 битов. Если для получения выполнено 10 итераций, то количество битов для отправки 10 матриц преобразования T
i для этих 10 итераций может быть задано как 10·[(2·5-2)+3]=110 битов. Для сравнения, если является матрицей 4×4 и вещественные и мнимые части комплексных элементов каждая квантуются до 5 битов, то количество битов, используемое для отправки 16 комплексных элементов , может быть задано как 16·2·5=160 битов.
В другой схеме, угол φ для g1 и угол θ для c и s задаются с неравномерным квантованием. Углы φ и θ могут быть получены на основе вычислений (с использованием) цифрового компьютера c поворотом системы координат (CORDIC), который реализует итерационный алгоритм, обеспечивающий возможность быстрого аппаратного вычисления тригонометрических функций, например синус, косинус, амплитуда и фаза с использованием простых операций сдвига, суммирования и вычитания. Комплексное число R=RI±jRQ можно вращать до 90 градусов посредством умножения R на комплексное число Cm, имеющее вид Cm=1±jBm, где Bm=2-m, и m является индексом, определяемым как m=0,1,2....
R можно вращать против часовой стрелки, если Cm=1+jBm, и результат вращения может быть выражен как:

R можно вращать по часовой стрелке, если Cm=1-jBm, и результат вращения может быть выражен как:

Вращение R против часовой стрелки в наборе уравнений (13) и вращение R по часовой стрелке в наборе уравнения (14) посредством умножения на Cm может быть осуществлено (i), смещением и RI, и RQ на m двоичных разрядов, (ii) добавлением/вычитанием смещенного RQ к/из RI для получения YI, и (iii) добавлением/вычитанием смещенного RI к/из RQ для получения YQ. Для выполнения вращения умножение не требуются.
В таблице 1 представлены значения Bm, комплексное число Cm, фаза Cm и амплитуда Cm для каждого значения m от 0 до 5. Как представлено в таблице 1, для каждого значения m фаза Cm немного больше, чем половина фазы Cm-1.
Амплитуда и фаза R могут быть определены посредством итерационного вращения R против часовой стрелки и/или по часовой стрелке с постепенным уменьшением фаз, пока фаза результата вращения R не приблизится к нулю и результат вращения R, главным образом, не будет лежать на оси x. Переменная фазы φtotal может быть инициализирована нулем, и переменная Rm=RI,m+jRQ,m, представляющая результат вращения R, может быть инициализирована как R0=R. Для каждой итерации, начинающейся с m=0, Rm имеет положительную фазу, если RQ,m положительная величина, или отрицательную фазу, если RQ,m отрицательная величина. Если фаза Rm отрицательная, то Rm вращают против часовой стрелки на φm посредством умножения Rm на Сm=1+jBm, как показано в наборе уравнений (13). И наоборот, если фаза Rm положительная, то Rm вращают по часовой стрелке на φm посредством умножения Rm на Сm=1-jBm, как показано в наборе уравнений (14). φtotal обновляют на +φm, если Rm вращают против часовой стрелки, и на -φm, если Rm вращают по часовой стрелке. φtotal представляет кумулятивную фазу, которая была добавлена к фазе R или вычтена из нее для обнуления фазы Rm.
Конечный результат становится более точным по мере выполнения большего количества итераций. После завершения всех итераций фаза Rm должна быть близка к нулю, мнимая часть Rm должна быть близка к нулю, и вещественная часть Rm равна амплитуде R, масштабированной увеличением CORDIC. Увеличение CORDIC асимптотически приближается к 1,646743507 для больших значений m и может вычисляться другими блоками схемы. Конечное значение φtotal является приближением фазы R. φtotal может быть представлено последовательностью знаковых разрядов z0z1z2..., где zm=1, если φm вычитался из φtotal, и zm=-1, если φm добавлялся к φtotal.
Угол φ для g1 может быть задан битовой последовательностью z0z1z2..., полученной из вычисления CORDIC dpq. Угол θ для c и s может быть задан другой битовой последовательностью Z0Z1Z2..., полученной из вычисления CORDIC c+js. В качестве альтернативы, можно использовать справочную таблицу для τ для вывода угла θ для c и s, и можно сохранять сдвиги CORDIC для угла θ и обходить c и s. В передатчике, процессор CORDIC может принимать сдвиги CORDIC для получения c и s.
Способы, описанные в этом документе, могут использоваться для одночастотных систем, систем, которые используют OFDM, систем, которые используют SC-FDM, и т.д. Для системы, которая использует OFDM или SC-FDM, для множества поднесущих можно получать множество матриц характеристик канала H(k). Итерационный процесс можно выполнять для каждой матрицы характеристик канала H(k) для получения матриц  и
и  , которые являются приближениями матрицы собственных векторов V(k) и матрицы собственных значений Λ(k) для этой H(k). Может существовать высокая степень корреляции между матрицами характеристик канала для ближайших поднесущих. Эту корреляцию можно использовать в итерационном процессе для уменьшения вычисления для получения
, которые являются приближениями матрицы собственных векторов V(k) и матрицы собственных значений Λ(k) для этой H(k). Может существовать высокая степень корреляции между матрицами характеристик канала для ближайших поднесущих. Эту корреляцию можно использовать в итерационном процессе для уменьшения вычисления для получения  и
и  для всех представляющих интерес поднесущих.
для всех представляющих интерес поднесущих.
На фиг.2 изображено разложение по собственным значениям для множества поднесущих. Итерационный процесс может выполняться для одной поднесущей за один раз. Для первой поднесущей, k1, матрица V
i(k1) может быть инициализирована единичной матрицей, или V
0(k1)=I, и матрица D
i(k1) может быть инициализирована R(k1), или D
0(k1)=R(k1)=H
H(k1)H(k1). Далее итерационный процесс может оперировать начальными решениями V
0(k1) и D
0(k1) для поднесущей k1, пока не будет выполнено условие завершения. Итерационный процесс может обеспечивать конечные V
i(k1) и D
i(k1) как и , соответственно, для поднесущей k1.
Для следующей поднесущей k2, которая может быть смежной с поднесущей k1 или ближайшей к ней, матрица V
i(k2) может быть инициализирована конечным результатом для поднесущей k1, или  , и матрица D
i(k2) может быть инициализирована как
, и матрица D
i(k2) может быть инициализирована как  . Далее итерационный процесс может оперировать начальными решениями V
0(k2) и D
0(k2) для поднесущей k2, пока не будет выполнено условие завершения. Итерационный процесс может обеспечивать конечные V
i(k2) и D
i(k2) как
. Далее итерационный процесс может оперировать начальными решениями V
0(k2) и D
0(k2) для поднесущей k2, пока не будет выполнено условие завершения. Итерационный процесс может обеспечивать конечные V
i(k2) и D
i(k2) как  , соответственно, для поднесущей k2.
, соответственно, для поднесущей k2.
Для каждой последующей поднесущей k, можно использовать конечные результаты, полученные для ближайшей поднесущей, как начальные решения V 0(k) и D 0(k) для поднесущей k. Далее итерационный процесс может оперировать начальными решениями для получения конечных результатов для поднесущей k.
Приемник может выполнять разложение для набора поднесущих. Этот набор может включать в себя последовательные поднесущие или поднесущие, разделенные некоторыми равными или неравными интервалами, или представляющие интерес конкретные поднесущие. Приемник может отправлять информацию обратной связи (например, параметры, используемые для получения ) для этого набора поднесущих.
Концепция, описанная выше, также может быть использована по времени. Для каждого интервала времени t, конечные решения, полученные для предшествующего интервала времени, могут быть использованы как начальные решения для текущего интервала времени t. Далее итерационный процесс может оперировать начальными решениями для интервала времени t, пока не будет выполнено условие завершения. Упомянутую концепцию можно также расширить и по частоте, и по времени.
В общем, в приемнике можно получать матрицу управления передачей любым способом. Матрица управления передачей может быть любой матрицей, которую передатчик может использовать для пространственной обработки. Матрица управления передачей может быть матрицей собственных векторов для канала MIMO, некоторой другой унитарной матрицей, которая может обеспечивать хорошие характеристики, и т.д. Матрица управления передачей может также называться матрицей управления, предкодирующей матрицей, собственными векторами и т.д. В приемнике можно получать матрицу управления передачей на основе любого типа преобразования, например разложения по собственным значениям, разложения по сингулярным числам матрицы, итерационного вращения Якоби и т.д. Параметры, определяющие матрицу управления передачей, которые могут зависеть от типа преобразования, используемого для получения матрицы управления передачей, можно отправлять в передатчик. Эти параметры могут быть представлены в различных формах, например, посредством вещественных и/или комплексных значений, углов, указателя формата, индексов строки и столбца и т.д.
На фиг.3 изображен пример обратной связи, отправляемой приемником в передатчик, для матрицы управления передачей, например матрицы . Информация обратной связи может включить в себя параметры для N матриц преобразования, используемых для получения матрицы управления передачей, вместо элементов матрицы управления передачей. Параметры для каждой матрицы преобразования могут содержать (i) значения элементов матрицы преобразования, например g1, c и s, (ii) углы элементов матрицы преобразования, например φ и θ, (iii) индексы строки и столбца элементов матрицы преобразования, например p и q, (iv) вид матрицы преобразования, например знаковый разряд для указания, использовать ли вид, представленный в уравнении (7j) или (7k), и/или (v) некоторую другую информацию. Индексы строки и столбца можно не включать, если элементы выбираются в предопределенном порядке, который известен заранее передатчику.
В общем, для обеспечения возможности передатчику получать матрицу управления передачей могут передаваться различные параметры. Передаваемые параметры могут зависеть от различных факторов, например типа выполняемого преобразования (например, итерационное вращение Якоби), способа, которым выполняется преобразование, способа, которым представлены элементы каждой матрицы преобразования, и т.д. Параметры, отправляемые как обратная связь, могут быть закодированы или сжаты для дальнейшего сокращения количества отправляемых битов для параметров.
На фиг.4 представлена схема процесса 400, выполняемого приемником. Можно определять набор параметров, определяющих матрицу управления передачей, которая должна быть использована для передачи из передатчика в приемник (этап 410). Для этапа 410, может быть получена матрица управления передачей на основе множества матриц преобразования, которые могут быть сформированы любым способом. Далее на основе множества матриц преобразования можно определять набор параметров. Упомянутый набор параметров можно отправлять в передатчик для использования передатчиком для получения матрицы управления передачей (этап 412).
На фиг.5 представлена схема устройства 500 для приемника. Устройство 500 включает в себя средство для определения набора параметров, определяющих матрицу управления передачей, которая должна быть использована для передачи из передатчика в приемник (модуль 510), и средство для отправки набора параметров для передатчика для использования передатчиком для получения матрицы управления передачей (модуль 512). Модули 510 и 512 могут содержать процессоры, электронные устройства, аппаратные устройства, электронные компоненты, логические схемы, блоки памяти и т.д. или любую их комбинацию.
На фиг.6 представлена схема процесса 600, выполняемого приемником. Можно выполнять множество итераций вращения Якоби матрицы канала (например, D i) посредством множества матриц преобразования (например, T i) для обнуления недиагональных элементов матрицы канала (этап 610). Матрица канала может быть корреляционной матрицей R, матрицей характеристик канала H или некоторой другой матрицей, полученной на основе оценки характеристик канала. Матрица управления передачей может быть инициализирована единичной матрицей, матрицей управления передачей, полученной для другой поднесущей, матрицей управления передачей, полученной для другого интервала времени, и т.д. (этап 612).
Для каждой итерации вращения Якоби, индексы p и q можно определять, например, посредством перебора элементов матрицы канала в предопределенном порядке или посредством идентификации наибольшего недиагонального элемента матрицы канала (этап 614). Подматрица (например, D pq) матрицы канала может быть сформирована на основе элементов матрицы канала с индексами p и q (этап 616). Упомянутую подматрицу можно разложить для получения вспомогательной матрицы (например, V pq) собственных векторов этой подматрицы, например, как показано в наборе уравнений (7) (этап 618). Матрица преобразования (например, T i) может быть сформирована на основе вспомогательной матрицы (этап 620), и параметры матрицы преобразования могут быть сохранены (этап 622). Матрица канала может быть обновлена на основе матрицы преобразования, например, как показано в уравнении (9) (этап 624). Матрица управления передачей также может быть обновлена на основе матрицы преобразования, например, как показано в уравнении (10) (этап 626).
Если условие завершения не выполнено, как определено на этапе 628, то процесс возвращается на этап 614 для следующей итерации вращения Якоби. В противном случае, параметры для всех матриц преобразования, используемые для получения матрицы управления передачей, можно отправлять в передатчик (этап 630). Эти параметры могут содержать, для каждой матрицы преобразования, по меньшей мере, один угол, по меньшей мере, одно значение, по меньшей мере, один индекс, указание вида матрицы преобразования и т.д. Этот, по меньшей мере, один угол может быть задан с равномерным или неравномерным квантованием, например, неравномерным квантованием, полученным из вычисления CORDIC.
На фиг.7 представлена схема процесса 700, выполняемого передатчиком. Набор параметров, определяющих матрицу управления передачей, можно принимать из приемника (этап 710). Матрица управления передачей может быть получена на основе набора параметров (этап 712). Для этапа 712, множество матриц преобразования может быть сформировано на основе набора параметров. Далее матрицу управления передачей можно обновлять посредством каждой из матриц преобразования. Матрицу управления передачей можно использовать для передачи из передатчика в приемник (этап 714).
На фиг.8 представлена схема процесса для этапа 712 на фиг.7. Матрица управления передачей может быть инициализирована единичной матрицей, матрицей управления передачей для другой поднесущей, матрицей управления передачей для другого интервала времени и т.д. (этап 810). Матрица преобразования может быть сформирована на основе параметров, принятых для матрицы преобразования (этап 812). Например для матрицы преобразования может быть принят, по меньшей мере, один угол, и может быть выполнено вычисление CORDIC этого, по меньшей мере, одного угла для получения, по меньшей мере, одного элемента матрицы преобразования. Матрица управления передачей может быть обновлена посредством матрицы преобразования (этап 814). Если не все матрицы преобразования были применены, то процесс возвращается на этап 812 для формирования и применения следующей матрицы преобразования. В противном случае, процесс заканчивается.
На фиг.9 представлена схема устройства 900 для передатчика. Устройство 900 включает в себя средство для приема набора параметров, определяющих матрицу управления передачей, из приемника (модуль 910), средство для получения матрицы управления передачей на основе этого набора параметров (модуль 912) и средство для использования матрицы управления передачей для передачи из передатчика в приемник (модуль 914). Модули с 910 по 914 могут содержать процессоры, электронные устройства, аппаратные устройства, электронные компоненты, логические схемы, блоки памяти и т.д. или любую их комбинацию.
Описанные здесь способы можно реализовать различными средствами. Например, эти способы могут быть реализованы аппаратными средствами, программно-аппаратными средствами, программными средствами или их комбинацией. Для реализации аппаратными средствами, процессоры, используемые для выполнения этих способов могут быть реализованы в одном или нескольких специализированных интегральных схемах (ASIC), цифровых сигнальных процессорах (DSP), устройствах цифровой обработки сигналов (DSPD), программируемых логических устройствах (PLD), пользовательских программируемых вентильных матрицах (FPGA), процессорах, контроллерах, микроконтроллерах, микропроцессорах, электронных устройствах, других электронных блоках, предназначенных для выполнения описанных здесь функций, в компьютере или их комбинациях.
Для реализации программными средствами и/или программно-аппаратными средствами, упомянутые способы могут быть реализованы посредством модулей (например, процедур, функций и т.д.), которые выполняют, описанные здесь функции. Микропрограммные и/или программные команды могут быть сохранены в памяти (например, памяти 132 или 182 на фиг.1) и исполнены процессором (например, процессором 130 или 180). Память может быть реализована внутри или вне процессора. Микропрограммные и/или программные команды могут также быть сохранены в другом читаемом процессором носителе информации, например оперативном запоминающем устройстве (RAM), постоянном запоминающем устройстве (ROM), энергонезависимом оперативном запоминающем устройстве (NVRAM), программируемом постоянном запоминающем устройстве (PROM), электрически стираемом PROM (EEPROM), флэш-памяти, компакт-диске (CD), магнитном или оптическом запоминающем устройстве и т.д.
Предыдущее описание изобретения дано для того, чтобы дать возможность любому специалисту в данной области техники создать или использовать это изобретение. Специалистам в данной области техники будут очевидны различные модификации этого изобретения, и определенные здесь общие принципы могут быть применены к другим вариантам, не выходя за пределы сущности и объема изобретения. Соответственно, не существует намерения ограничить это изобретение описанными здесь примерами, а предоставить полную свободу действий, согласующихся с принципами и новыми признаками, раскрытыми в этом документе.
Изобретение относится к связи, а более конкретно к способам отправки обратной связи для передачи с MIMO. Технический результат заключается в эффективном способе отправки матрицы управления передачей для уменьшения служебной информации. Для этого определяют набор параметров, определяющих набор матриц преобразования для получения матрицы управления передачей, которая должна быть использована для передачи из передатчика в приемник, и отправляют набор параметров в передатчик для использования передатчиком для получения матрицы управления передачей. 8 н. и 31 з.п. ф-лы, 1 табл., 9 ил.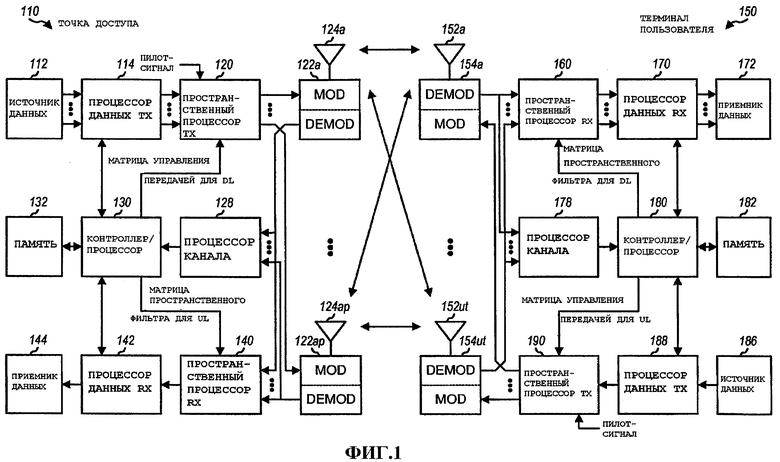
1. Устройство для получения матрицы управления передачей, содержащее:
по меньшей мере, один процессор, сконфигурированный для определения набора параметров, определяющих набор матриц преобразования для получения матрицы управления передачей, которая должна быть использована для передачи из передатчика в приемник, и отправки этого набора параметров в передатчик для использования передатчиком для получения матрицы управления передачей, и
память, соединенную, по меньшей мере, с одним процессором.
2. Устройство по п.1, в котором, по меньшей мере, один процессор сконфигурирован для получения матрицы управления передачей на основе множества матриц преобразования и определения набора параметров на основе этого множества матриц преобразования.
3. Устройство по п.2, в котором, по меньшей мере, один процессор сконфигурирован для выполнения множества итераций вращения Якоби матрицы канала посредством множества матриц преобразования для обнуления недиагональных элементов матрицы канала.
4. Устройство по п.3, в котором для каждой итерации вращения Якоби, по меньшей мере, один процессор сконфигурирован для получения матрицы преобразования на основе матрицы канала, для обновления матрицы канала на основе матрицы преобразования и обновления матрицы управления передачей на основе матрицы преобразования.
5. Устройство по п.4, в котором для каждой итерации вращения Якоби, по меньшей мере, один процессор сконфигурирован для формирования подматрицы матрицы канала, разложения этой подматрицы для получения вспомогательной матрицы собственных векторов подматрицы и формирования матрицы преобразования на основе вспомогательной матрицы.
6. Устройство по п.4, в котором для каждой итерации вращения Якоби, по меньшей мере, один процессор сконфигурирован для идентификации наибольшего недиагонального элемента матрицы канала и получения матрицы преобразования на основе индексов строки и столбца наибольшего недиагонального элемента.
7. Устройство по п.4, в котором, по меньшей мере, один процессор сконфигурирован для выбора элементов матрицы канала в предопределенном порядке для множества итераций вращения Якоби и получения матрицы преобразования для каждой итерации вращения Якоби на основе элементов матрицы канала, выбранных для этой итерации.
8. Устройство по п.4, в котором, по меньшей мере, один процессор сконфигурирован для инициализации матрицы управления передачей единичной матрицей, матрицей управления передачей для другой поднесущей или матрицей управления передачей для другого интервала времени до множества итераций вращения Якоби.
9. Устройство по п.4, в котором, по меньшей мере, один процессор сконфигурирован для получения матрицы канала на основе оценки характеристик канала.
10. Устройство по п.4, в котором, по меньшей мере, один процессор сконфигурирован для получения корреляционной матрицы для матрицы характеристик канала и использования этой корреляционной матрицы как матрицы канала.
11. Устройство по п.2, в котором набор параметров содержит, по меньшей мере, один угол для, по меньшей мере, одного элемента каждой из матриц преобразования.
12. Устройство по п.11, в котором, по меньшей мере, один процессор сконфигурирован для получения упомянутого, по меньшей мере, одного угла для каждой матрицы преобразования с равномерным квантованием.
13. Устройство по п.11, в котором, по меньшей мере, один процессор сконфигурирован для получения этого, по меньшей мере, одного угла для каждой матрицы преобразования с неравномерным квантованием из вычисления способом цифра - за - цифрой (CORDIC).
14. Устройство по п.2, в котором набор параметров содержит, по меньшей мере, одно значение для, по меньшей мере, одного элемента каждой матрицы преобразования, по меньшей мере, один индекс для, по меньшей мере, одного элемента каждой передачи, указание вида каждой матрицы преобразования или их комбинацию.
15. Способ получения матрицы управления передачей, содержащий:
определение набора параметров, определяющих набор матриц преобразования для получения матрицы управления передачей, которая должна быть использована для передачи из передатчика в приемник, и отправку набора параметров в передатчик для использования передатчиком для получения матрицы управления передачей.
16. Способ по п.15, в котором определение набора параметров содержит
получение матрицы управления передачей на основе множества матриц преобразования, и
определение набора параметров на основе множества матриц преобразования.
17. Способ по п.16, в котором получение матрицы управления передачей содержит
выполнение множества итераций вращения Якоби матрицы канала посредством множества матриц преобразования, и
для каждой итерации вращения Якоби,
получение матрицы преобразования на основе матрицы канала,
обновление матрицы канала на основе матрицы преобразования, и
обновление матрицы управления передачей на основе матрицы преобразования.
18. Способ по п.16, в котором определение набора параметров на основе множества матриц преобразования содержит формирование набора параметров с, по меньшей мере, одним углом для, по меньшей мере, одного элемента каждой матрицы преобразования.
19. Устройство для получения матрицы управления передачей, содержащее:
средство для определения набора параметров, определяющих набор матриц преобразования для получения матрицы управления передачей, которая должна быть использована для передачи из передатчика в приемник, и
средство для отправки набора параметров в передатчик для использования передатчиком для получения матрицы управления передачей.
20. Устройство по п.19, в котором средство для определения набора параметров содержит
средство для получения матрицы управления передачей на основе множества матриц преобразования, и
средство для определения набора параметров на основе множества матриц преобразования.
21. Устройство по п.20, в котором средство для получения матрицы управления передачей содержит
средство для выполнения множества итераций вращения Якоби матрицы канала посредством множества матриц преобразования, и
средство для каждой итерации вращения Якоби,
получения матрицы преобразования на основе матрицы канала,
обновления матрицы канала на основе матрицы преобразования, и
обновления матрицы управления передачей на основе матрицы преобразования.
22. Устройство по п.20, в котором средство для определения набора параметров на основе множества матриц преобразования содержит
средство для формирования набора параметров с, по меньшей мере, одним углом для, по меньшей мере, одного элемента каждой матрицы преобразования.
23. Читаемый процессором носитель для получения матрицы управления передачей, включающий в себя команды, сохраненные на нем, содержащий:
первый набор команд для определения набора параметров, определяющих набор матриц преобразования для получения матрицы управления передачей, которая должна быть использована для передачи из передатчика в приемник, и
второй набор команд для отправки набора параметров в передатчик для использования передатчиком для получения матрицы управления передачей.
24. Читаемый процессором носитель по п.23, в котором первый набор команд содержит
третий набор команд для получения матрицы управления передачей на основе множества матриц преобразования, и
четвертый набор команд для определения набора параметров на основе множества матриц преобразования.
25. Читаемый процессором носитель по п.24, в котором четвертый набор команд содержит
пятый набор команд для формирования набора параметров с, по меньшей мере, одним углом для, по меньшей мере, одного элемента каждой матрицы преобразования.
26. Устройство для получения матрицы управления передачей, содержащее:
по меньшей мере, один процессор, сконфигурированный для приема набора параметров, определяющих набор матриц преобразования для получения матрицы управления передачей, при этом матрицу управления передачей получают на основе набора матриц преобразования и использования матрицы управления передачей для передачи из передатчика в приемник, и память, соединенную, по меньшей мере, с одним процессором.
27. Устройство по п.26, в котором, по меньшей мере, один процессор сконфигурирован для инициализации матрицы управления передачей, формирования набора матриц преобразования на основе набора параметров и обновления матрицы управления передачей посредством каждой из матриц преобразования.
28. Устройство по п.26, в котором, по меньшей мере, один процессор сконфигурирован для получения, по меньшей мере, одного угла для, по меньшей мере, одного элемента каждой матрицы преобразования из набора параметров и формирования каждой матрицы преобразования на основе этого, по меньшей мере, одного угла для матрицы преобразования.
29. Устройство по п.28, в котором, по меньшей мере, один процессор сконфигурирован для получения, по меньшей мере, одного элемента каждой матрицы преобразования посредством выполнения вычисления способом цифра - за - цифрой (CORDIC) на основе, по меньшей мере, одного угла для матрицы преобразования.
30. Устройство по п.27, в котором, по меньшей мере, один процессор сконфигурирован для инициализации матрицы управления передачей единичной матрицей, матрицей управления передачей для другой поднесущей или матрицей управления передачей для другого интервала времени.
31. Способ получения матрицы управления передачей, содержащий:
прием набора параметров, определяющих набор матриц преобразования для получения матрицы управления передачей,
получение матрицы управления передачей на основе набора матриц преобразования, и
использование матрицы управления передачей для передачи из передатчика в приемник.
32. Способ по п.31, в котором получение матрицы управления передачей содержит
инициализацию матрицы управления передачей,
формирование набора матриц преобразования на основе набора параметров, и
обновление матрицы управления передачей посредством каждой из матриц преобразования.
33. Способ по п.31, в котором формирование множества матриц преобразования содержит
получение, по меньшей мере, одного угла для, по меньшей мере, одного элемента каждой матрицы преобразования из набора параметров, и
формирование каждой матрицы преобразования на основе упомянутого, по меньшей мере, одного угла для матрицы преобразования.
34. Устройство для получения матрицы управления передачей, содержащее:
средство для приема набора параметров, определяющих набор матриц преобразования для получения матрицы управления передачей,
средство для получения матрицы управления передачей на основе набора матриц преобразования, и
средство для использования матрицы управления передачей для передачи из передатчика в приемник.
35. Устройство по п.34, в котором средство для получения матрицы управления передачей содержит
средство для инициализации матрицы управления передачей,
средство для формирования набора матриц преобразования на основе набора параметров, и
средство для обновления матрицы управления передачей посредством каждой из матриц преобразования.
36. Устройство по п.34, в котором средство для формирования множества матриц преобразования содержит
средство для получения, по меньшей мере, одного угла для, по меньшей мере, одного элемента каждой матрицы преобразования из набора параметров, и
средство для формирования каждой матрицы преобразования на основе упомянутого, по меньшей мере, одного угла для матрицы преобразования.
37. Читаемый процессором носитель для получения матрицы управления передачей, включающий в себя команды, сохраненные на нем, содержащий:
первый набор команд для приема набора параметров, определяющих набор матриц преобразования для получения матрицы управления передачей,
второй набор команд для получения матрицы управления передачей на основе упомянутого набора матриц преобразования, и
третий набор команд для использования матрицы управления передачей для передачи из передатчика в приемник.
38. Читаемый процессором носитель по п.37, в котором второй набор команд содержит
четвертый набор команд для инициализации матрицы управления передачей,
пятый набор команд для формирования набора матриц преобразования на основе набора параметров, и
шестой набор команд для обновления матрицы управления передачей посредством каждой из матриц преобразования.
39. Читаемый процессором носитель по п.37, содержащий также
седьмой набор команд для получения, по меньшей мере, одного угла для, по меньшей мере, одного элемента каждой матрицы преобразования из набора параметров, и
восьмой набор команд для формирования каждой матрицы преобразования на основе этого, по меньшей мере, одного угла для матрицы преобразования.
| US 2004190636 А1, 30.09.2004 | |||
| УСТРОЙСТВО МОБИЛЬНОЙ СВЯЗИ С МНОЖЕСТВОМ ПЕРЕДАЮЩИХ И ПРИЕМНЫХ АНТЕНН И СООТВЕТСТВУЮЩИЙ СПОСОБ МОБИЛЬНОЙ СВЯЗИ | 2003 |
|
RU2238611C1 |
| RU 2003135853 A, 20.04.2005 | |||
| WO 2004054191 А1, 24.06.2004 | |||
| WO 2005060144 А1, 30.06.2005. | |||

