Требование приоритета по разделу 35 §119 Свода законов США
Настоящая патентная заявка испрашивает приоритет временной заявки № 60/758344, озаглавленной «SPHERE DETECTION AND RATE SELECTION FOR A MIMO TRANSMISSIO», зарегистрированной 11 января 2006 года и переуступленной правопреемнику, которая специально приведена для справки.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
I. Область техники
Настоящее раскрытие относится в общем случае к связи, а более конкретно к методикам выполнения обнаружения (детектирования) и выбора скорости для передачи с множеством входов и множеством выходов (MIMO).
II. Предшествующий уровень техники
Передача MIMO является передачей, посылаемой от множества (T) передающих антенн к множеству (R) приемных антенн. Канал MIMO, сформированный T передающими антеннами и R приемными антеннами, может разделяться на М пространственных каналов, где М ≤ минимум (T, R). М пространственных каналов могут использоваться для передачи данных таким образом, чтобы достигать более высокой полной пропускной способности и/или большей надежности.
Передатчик может кодировать и передавать М потоков данных параллельно через T передающих антенн. Приемник получает R принятых потоков символов через R приемных антенн, выполняет обнаружение над принятыми потоками символов и декодирует обнаруженные потоки символов для восстановления переданных потоков данных. Для достижения оптимальной эффективности обнаружения приемник должен оценивать множество гипотез для всех возможных последовательностей битов, которые могли быть переданы, основываясь на всей информации, доступной в приемнике. Такой полный перебор требует большого объема необходимых вычислений и является недопустимым для многих приложений.
Поэтому в предшествующем уровне техники существует потребность в методике выполнения обнаружения с меньшей сложностью, которая достигает хорошей эффективности.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Описаны методики выполнения сферического обнаружения для восстановления символов данных, посылаемых в передаче MIMO. В одном аспекте сферическое обнаружение выполняют для символов данных, сгенерированных с помощью, по меньшей мере, двух схем модуляции. В другом аспекте сферическое обнаружение выполняют для символов данных в порядке, который определяют, основываясь на, по меньшей мере, одном атрибуте символов данных, которыми могут быть вероятности ошибки для символов данных, схемы модуляции, используемые для символов данных, энергетические запасы линии связи (link margins) для символов данных и т.д. В еще одном аспекте скорости для потоков данных, обнаруженных с помощью сферического обнаружения, выбирают, основываясь на информации о состоянии канала. Информация о состоянии канала может содержать оценки канала, оценки шума, оценки помех, оценки качества сигнала, измерения мощности и т.д. В одном или большем количестве вариантов осуществления качества сигналов потоков данных можно оценивать, основываясь (1) на верхней треугольной матрице, используемой для сферического обнаружения, и/или (2) на предположении, что подавляют помехи от уже обнаруженных потоков данных. Скорости для потоков данных можно выбирать, основываясь на оцененных качествах сигналов. В других вариантах осуществления скорости можно выбирать другими способами, основываясь на информации о состоянии канала.
Сферическое обнаружение и выбор скорости описаны подробно ниже. Различные аспекты и варианты осуществления изобретения также описаны ниже.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Особенности и сущность настоящего изобретения станут более очевидными из сформулированного ниже подробного описания при его рассмотрении вместе с чертежами, на которых одинаковые позиционные обозначения идентифицируют соответствующие части.
Фиг.1 показывает структурную схему аспектов передатчика и приемника.
Фиг.2 показывает структурную схему аспектов передающего (TX, ПРД) процессора данных и TX пространственного процессора в передатчике.
Фиг.3 показывает аспекты примерного дерева поиска для сферического обнаружения.
Фиг.4 показывает аспекты процесса выполнения сферического обнаружения в выбранном порядке.
Фиг.5 показывает аспекты устройства для выполнения сферического обнаружения в выбранном порядке.
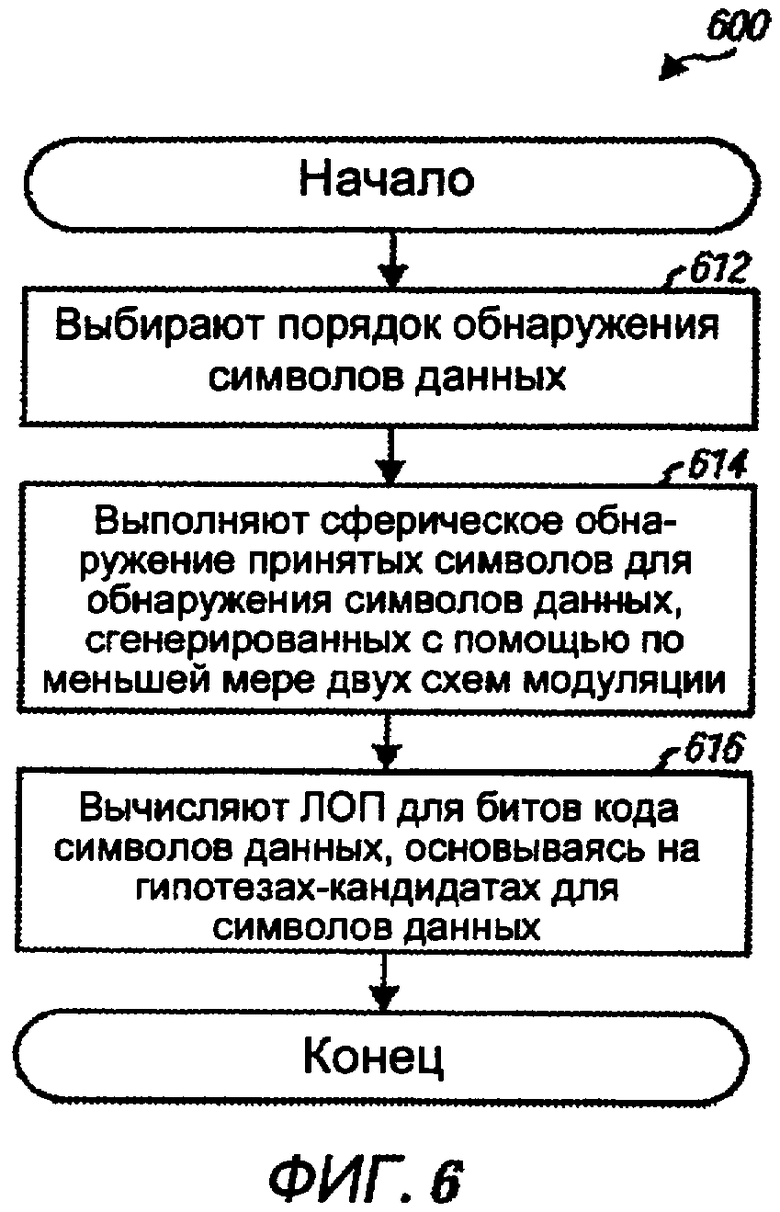
Фиг.6 показывает аспекты процесса выполнения сферического обнаружения символов данных, сгенерированных с помощью множества схем модуляции.
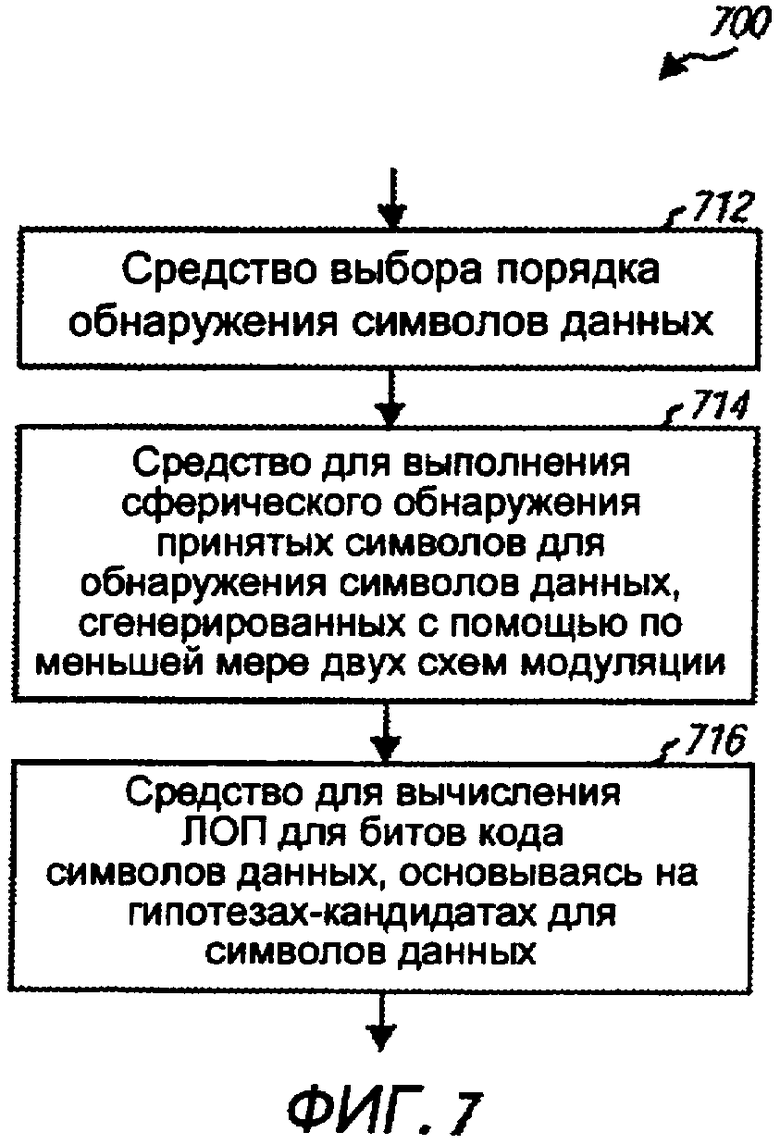
Фиг.7 показывает аспекты устройства для выполнения сферического обнаружения символов данных, сгенерированных с помощью множества схем модуляции.
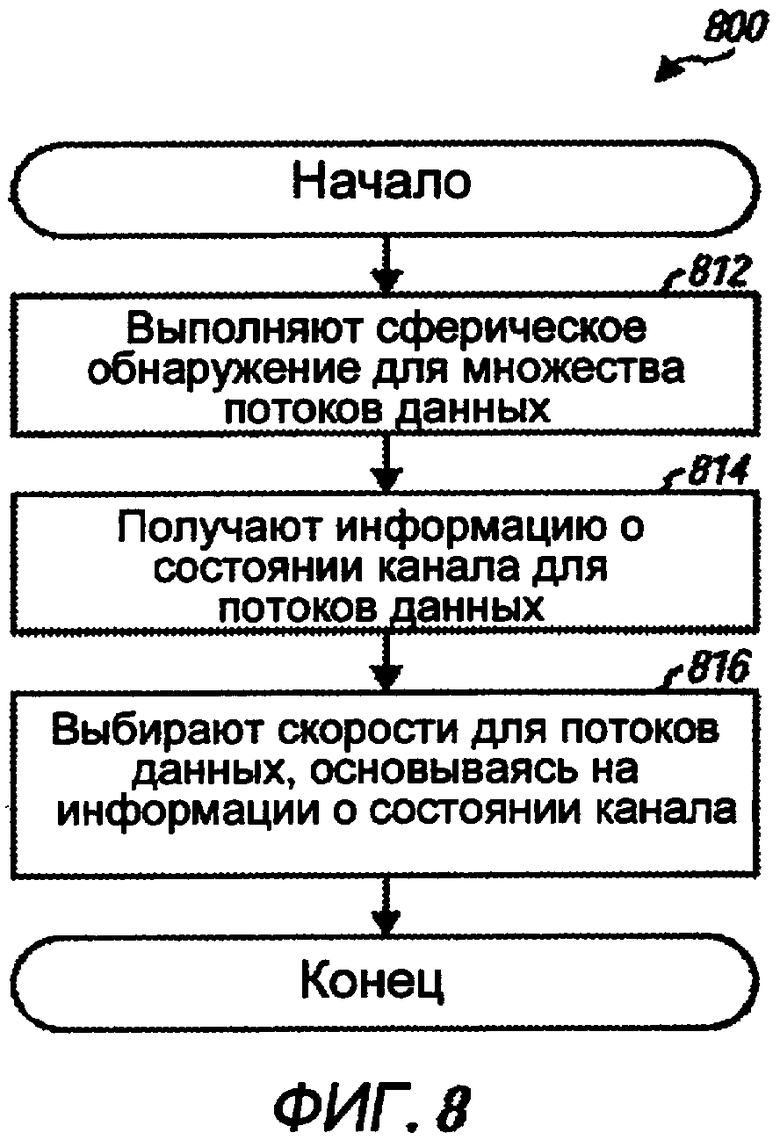
Фиг.8 показывает аспекты процесса выбора скоростей для потоков данных.
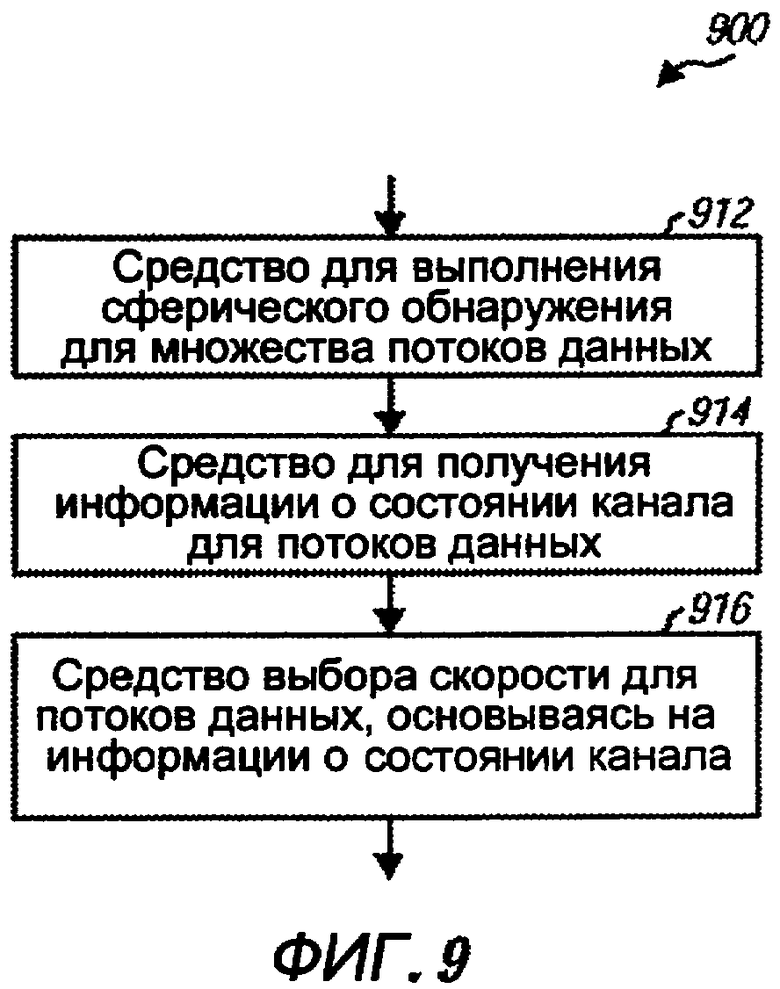
Фиг.9 показывает аспекты устройства для выбора скоростей для потоков данных.
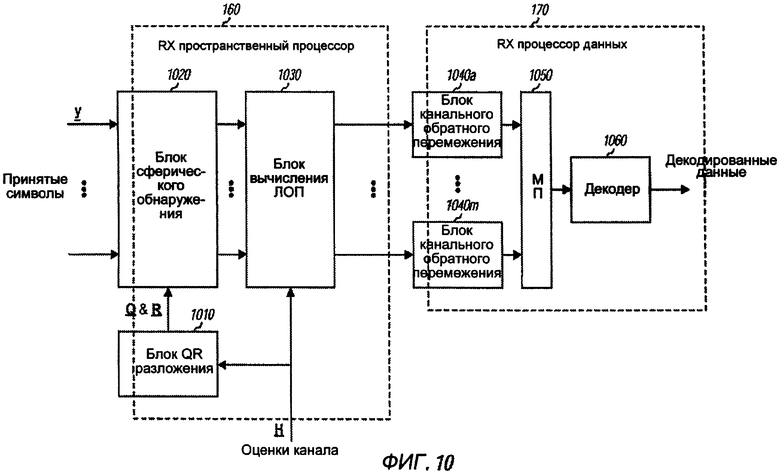
Фиг.10 показывает структурную схему аспектов приемного (RX, ПРМ) пространственного процессора и RX процессора данных в приемнике.
ПОДРОБНОЕ ОПИСАНИЕ
Слово «примерный» в данной работе означает «служить примером или иллюстрацией». Любой вариант осуществления или разработки, описанный в данной работе как «примерный», не обязательно должен рассматриваться как предпочтительный или преимущественный по сравнению с другими вариантами осуществления или разработки.
Описанные методики обнаружения и выбора скорости могут использоваться для различных систем связи, в которых множество потоков данных передают параллельно через канал связи. Например, эти методики могут использоваться для системы MIMO с одной поднесущей, системы MIMO с множеством поднесущих, системы множественного доступа с кодовым разделением каналов (CDMA), системы множественного доступа с частотным разделением каналов (FDMA), системы множественного доступа с временным разделением каналов (TDMA) и т.д. Множество поднесущих можно получать с помощью ортогонального мультиплексирования с частотным разделением каналов (OFDM), множественного доступа с частотным разделением каналов с одной несущей (SC-FDMA) или с помощью некоторой другой методики модуляции. OFDM и SC-FDMA делят всю полосу пропускания системы на множество ортогональных поднесущих, которые также называют тонами, элементарными сигналами и т.д., каждую из которых можно независимо модулировать с помощью данных. В общем случае символы модуляции посылают в частотной области с помощью OFDM и во временной области с помощью SC-FDMA. Для ясности большая часть описания приведена ниже для системы MIMO с одной поднесущей.
Фиг.1 показывает структурную схему аспектов передатчика 110 и приемника 150 в системе 100 MIMO. Передатчик 110 оборудован множеством (T) антенн, и приемник 150 оборудован множеством (R) антенн. Для передачи нисходящей линии связи (или прямого канала связи) передатчик 110 может быть частью, а может содержать некоторые или все функциональные возможности базовой станции, узла доступа, узла B и т.д. Приемник 150 может быть частью, а может содержать некоторые или все функциональные возможности подвижной станции, пользовательского терминала, пользовательского оборудования и т.д. Для передачи восходящего канала связи (или обратного канала связи) передатчик 110 может быть частью подвижной станции, пользовательского терминала, пользовательского оборудования и т.д., а приемник 150 может быть частью базовой станции, узла доступа, узла B и т.д.
В передатчике 110 TX процессор 120 данных принимает данные трафика из источника 112 данных и обрабатывает (например, форматирует, кодирует, перемежает и выполняет символьное отображение) данные трафика для генерации символов данных, которые являются символами модуляции для данных трафика. TX пространственный процессор 130 мультиплексирует символы данных с пилотными символами, которые являются символами модуляции для пилот-сигнала. Пилот-сигнал является передачей, которая заранее известна и передатчику, и приемнику, и его могут также упоминать как обучающий сигнал, эталонный сигнал, преамбула и т.д. TX пространственный процессор 130 выполняет пространственную обработку передатчика и обеспечивает передачу T потоков передаваемых символов к T блокам 132a-132t передатчика (TMTR, ПРДТ). Каждый блок 132 передатчика обрабатывает (например, модулирует с помощью OFDM, преобразовывает в аналоговый сигнал, фильтрует, усиливает и преобразовывает с повышением частоты) передаваемый поток символов и генерирует модулированный сигнал. T модулированных сигналов от блоков 132a-132t передатчика передают от антенн 134a-134t соответственно.
В приемнике 150 R антенн 152a-152r принимают T модулированных сигналов, и каждая антенна 152 обеспечивает передачу принятого сигнала к соответствующему блоку 154 приемника (RCVR). Каждый блок 154 приемника обрабатывает принятый сигнал способом, дополнительным к обработке, выполняемой блоками 132 передатчика, для получения принятых символов. Каждый блок 154 приемника обеспечивает передачу принятых символов данных трафика к RX пространственному процессору 160 и обеспечивает передачу принятых символов пилот-сигнала на канальный процессор 194. Канальный процессор 194 оценивает отклик канала MIMO от передатчика 110 на приемник 150, основываясь на принятых символах пилот-сигнала и обеспечивает передачу оценок канала на RX пространственный процессор 160. RX пространственный процессор 160 выполняет сферическое обнаружение над принятыми символами с помощью оценок канала и обеспечивает передачу обнаруженных символов, которые являются оценками переданных символов данных. RX процессор 170 данных дополнительно обрабатывает (например, выполняет обратное перемежение и декодирование) обнаруженные символы и обеспечивает передачу декодированных данных к приемнику 172 данных.
Приемник 150 может посылать информацию обратной связи для помощи передатчику 110 в управлении передачей данных на приемник 150. Информация обратной связи может указывать конкретный режим передачи для использования для передачи, конкретную скорость или формат пакета для использования для каждого потока данных, подтверждения (ACK) и/или отрицательные подтверждения (NAK) для пакетов, декодированных с помощью приемника 150, информацию о состоянии канала и т.д., или любую их комбинацию. Информацию обратной связи обрабатывают (например, выполняют кодирование, перемежение и символьное отображение) с помощью TX процессора 180 сигналов, мультиплексируют с пилотными символами и пространственно обрабатывают с помощью TX пространственного процессора 182 и дополнительно обрабатывают с помощью блоков 154a-154r передатчика для генерации R модулированных сигналов, которые передают через антенны 152a-152r.
В передатчике 110 R модулированных сигналов принимают с помощью антенн 134a-134t, обрабатывают с помощью блоков 132a-132t приемника, пространственно обрабатывают с помощью RX пространственного процессора 136 и дополнительно обрабатывают (например, выполняют обратное перемежение и декодирование) с помощью RX процессора 138 сигналов для восстановления информации обратной связи. Контроллер/процессор 140 управляет передачей данных на приемник 150, основываясь на принятой информации обратной связи. Канальный процессор 144 может оценивать отклик канала MIMO от приемника 150 на передатчик 110 и может получать матрицы пространственного отображения, используемые TX пространственным процессором 130.
Контроллеры/процессоры 140 и 190 управляют работой передатчика 110 и приемника 150 соответственно. Блоки 142 и 192 памяти хранят данные и программные коды для передатчика 110 и приемника 150 соответственно.
Фиг.2 показывает структурную схему аспектов TX процессора 120 данных и TX пространственного процессора 130 в передатчике 110. В данном варианте осуществления для всех потоков данных используют общую схему кодирования, но можно использовать отдельную скорость кодирования и отдельную схему модуляции для каждого потока данных. Для ясности последующее описание предполагает, что М потоков данных посылают в М пространственных каналах. Однако это не обязательно должно происходить, и поток данных может распространяться по множеству пространственных каналов.
В пределах TX процессора 120 данных кодер 220 кодирует данные трафика в соответствии со схемой кодирования и генерирует биты кода. Схема кодирования может включать в себя сверточный код, турбокод, код с низкой плотностью проверки на четность (LDPC), циклический избыточный код (CRC, ЦИК), блочный код и т.д., или их комбинацию. Демультиплексор (ДМП) 222 демультиплексирует, или делит, биты кода на М потоков и обеспечивает передачу М потоков битов кода к М наборам блоков обработки. Каждый набор включает в себя блок 224 выкалывания, блок 226 канального перемежения и блок 228 символьного отображения. Для каждого набора блок 224 выкалывания выкалывает, или удаляет биты кода, по мере необходимости, для достижения скорости кодирования, выбранной для потока, и обеспечивает передачу сохраненных битов кода к соединенному с ним блоку 226 канального перемежения. Блок 226 канального перемежения перемежает, или переупорядочивает биты кода, основываясь на схеме перемежения, и обеспечивает передачу перемеженных битов к соединенному с ним блоку 228 символьного отображения. Перемежение можно выполнять отдельно для каждого потока данных (как показано на фиг.2) или по некоторым, или по всем потокам данных (не показано на фиг.2).
В одном или большем количестве вариантов осуществления каждый поток данных можно посылать с помощью схемы модуляции, выбранной для этого потока. В общем случае для М потоков данных можно использовать одинаковые или отличающиеся схемы модуляции в зависимости от работающей системы, условий в канале и/или других факторов. Каждый блок 228 символьного отображения отображает перемеженные биты в соответствии со схемой модуляции, выбранной для его потока, и обеспечивает передачу потока символов данных {s
m}. Символьное отображение для m потоков можно достигать с помощью (1) группирования наборов из Qm битов для формирования Qm-битного значения, где Qm≥1, и (2) отображения каждого Qm-битного значения на одну из  точек в совокупности сигнала для выбранной схемы модуляции. Каждая отображенная точка сигнала является комплексным значением символа данных. Символьное отображение может быть основано на отображении Грея или не на отображении Грея. При отображении Грея соседние точки в совокупности сигнала (и в горизонтальном, и в вертикальном направлениях) отличаются только одной из позиций бита Qm. Отображение Грея сокращает количество ошибок в символе для событий с большей вероятностью ошибки, которые соответствуют обнаруженному символу, отображаемому к расположению около правильного расположения, когда только один кодированный бит обнаружен с ошибкой. При отображении не Грея соседние точки могут отличаться больше, чем одной позицией бита.
точек в совокупности сигнала для выбранной схемы модуляции. Каждая отображенная точка сигнала является комплексным значением символа данных. Символьное отображение может быть основано на отображении Грея или не на отображении Грея. При отображении Грея соседние точки в совокупности сигнала (и в горизонтальном, и в вертикальном направлениях) отличаются только одной из позиций бита Qm. Отображение Грея сокращает количество ошибок в символе для событий с большей вероятностью ошибки, которые соответствуют обнаруженному символу, отображаемому к расположению около правильного расположения, когда только один кодированный бит обнаружен с ошибкой. При отображении не Грея соседние точки могут отличаться больше, чем одной позицией бита.
В пределах TX пространственного процессора 130 мультиплексор (МП) 230 принимает М потоков символов данных от М блоков 228a-228m символьного отображения и мультиплексирует символы данных с пилотными символами. Блок 232 матричного умножения умножает данные и/или пилотные символы на матрицы пространственного отображения P и обеспечивает передаваемые символы. В одном или большем количестве вариантов осуществления матрицы пространственного отображения являются единичными матрицами I, которые не приводят ни к какой пространственной обработке в передатчике. В других вариантах осуществления различные матрицы пространственного отображения посылают в различные периоды символа и/или на различных поднесущих для достижения одинаковой эффективности для М потоков данных. В других вариантах осуществления матрицы пространственного отображения являются матрицами собственных векторов.
Фиг.2 показывает аспекты схемы общего кодирования, но можно использовать отдельные скорости кодирования и схемы модуляции для М потоков данных. Различные скорости кодирования можно достигать для М потоков данных при использовании различных образцов выкалывания для этих потоков. В других вариантах осуществления общую схему кодирования и общую скорость кодирования используют для всех потоков данных, но отдельные схемы модуляции могут использоваться для потоков данных. В других вариантах осуществления общую схему кодирования, общую скорость кодирования и общую схему модуляции используют для всех потоков данных. В других вариантах осуществления каждый поток данных обрабатывают независимо, основываясь на схеме кодирования и модуляции, выбранной для этого потока данных. В общем случае одинаковые или различные схемы кодирования, одинаковые или различные скорости кодирования и одинаковые или различные схемы модуляции могут использоваться для М потоков данных. Если доступно множество поднесущих, то одинаковые или различные схемы кодирования, одинаковые или различные скорости кодирования и одинаковые или различные схемы модуляции могут использоваться по поднесущим.
Передатчик 110 обычно кодирует каждый пакет данных отдельно. Пакет можно разделять на множество блоков, причем каждый блок содержит K битов кода. K битов кода в каждом блоке можно отображать на М символов данных следующим образом:
s = отображение (b),
 Ур.(1)
Ур.(1)
где s=[s1, s2… sM]T является вектором с М символами данных;

является вектором с K битами кода в одном блоке;
b m является вектором с Qm битами кода, используемыми для формирования s m символов данных;
b m,q для m=1, …, М и q=1, …, Qm является q-м битом кода в векторе b m;
b k для k=1, …, K является k-м битом кода в векторе b; и
«T» обозначает транспонирование.
Уравнение (1) указывает, что существует взаимно-однозначное отображение между данным битовым вектором b и соответствующими векторами s данных. В общем случае одинаковые или различные схемы модуляции могут использоваться для М символов данных, посылаемых в данном векторе s данных. Следовательно, Q1-QM могут быть одинаковыми или различными для М символов данных в векторе s.
В одном или большем количестве вариантов осуществления М потоков данных совместно кодируют так, чтобы один пакет можно было посылать по множеству (например, по всем M) пространственных каналов. В других вариантах осуществления независимо кодируют М потоков данных так, чтобы каждый пакет посылали в одном пространственном канале. В еще других вариантах осуществления некоторые потоки данных совместно кодируют, в то время как другие потоки данных кодируют независимо.
Для ясности последующее описание предполагает, что один поток данных посылают в каждом пространственном канале. Термины «поток данных» и «пространственный канал» являются, таким образом, взаимозаменяемыми для большой части приведенного ниже описания. Количество потоков данных может быть конфигурируемым, и его можно выбирать, основываясь на условиях в канале и/или на других факторах. Для ясности последующее описание предполагает, что М потоков данных посылают в М пространственных каналах.
1. Обнаружение
Принятые символы в приемнике могут быть выражены как:

 Ур.(2)
Ур.(2)
где P является T×М матрицей пространственного отображения, используемой передатчиком;
H ch является R×T матрицей фактических откликов канала MIMO;
H= является R×М матрицей эффективных откликов канала MIMO;
является R×М матрицей эффективных откликов канала MIMO;
y является R×1 вектором с R принятыми символами в приемнике; и
n является R×1 вектором шума.
Можно предполагать, что шум является совокупным белым Гауссовым шумом (AWGN) с нулевым средним вектором и матрицей ковариации  , где
, где  - дисперсия шума.
- дисперсия шума.
Эффективный отклик канала MIMO H включает в себя фактический отклик канала MIMO H ch и матрицу пространственного отображения P, используемую передатчиком. Матрицу эффективных откликов канала MIMO можно задавать следующим образом:
 Ур.(3)
Ур.(3)
где элемент hr,m для r=1, …, R и m=1, …, М обозначает сложное усиление канала, наблюдаемое с помощью потока данных m в приемной антенне r. Для простоты предполагают, что канал MIMO имеет постепенное затухание без избирательности по частоте. Приемник обычно получает  , что является оценкой H, и использует
, что является оценкой H, и использует  для обнаружения. Для простоты в данном описании предполагают отсутствие ошибок оценки канала, так что =H. H также упоминается как матрица откликов канала MIMO.
для обнаружения. Для простоты в данном описании предполагают отсутствие ошибок оценки канала, так что =H. H также упоминается как матрица откликов канала MIMO.
Для передачи MIMO на одной поднесущей приемник получает принятый вектор y символа в каждый период символа, используемый для передачи. Для передачи MIMO на множестве поднесущих приемник получает принятый вектор y символа для каждой поднесущей в каждый период символа, используемый для передачи. В одном или большем количестве вариантов осуществления приемник выполняет обнаружение отдельно для каждого принятого вектора y символа. В других вариантах осуществления приемник выполняет обнаружение совместно для множества принятых векторов символов. Приемник может выполнять обнаружение по-разному.
Приемник может выполнять обнаружение по методу максимального правдоподобия (МП, ML) над принятыми символами для получения обнаруженных символов. Для обнаружения по методу МП приемник оценивает каждый из 2K гипотетических векторов символов, которые могли быть переданы для вектора s символа данных. Для каждого гипотетического вектора символа приемник вычисляет метрику расстояния, которую можно задавать следующим образом:
где  является гипотетическим вектором символа, который передали для вектора s, и
является гипотетическим вектором символа, который передали для вектора s, и
D( ) является расстоянием для гипотетического вектора символа.
) является расстоянием для гипотетического вектора символа.
Уравнение (4) может также упоминаться как функция стоимости, ошибочная функция и т.д. D() может также упоминаться как значение стоимости или ошибочное значение для вектора .
Для обнаружения по методу МП приемник получает 2K расстояний для 2K гипотетических векторов символа. Приемник может затем получать обнаруженные символы следующим образом:

где  =
= является М×1 вектором с М обнаруженными символами. В уравнении (5) идентифицируют минимальное расстояние среди 2К расстояний для 2К гипотетических векторов символа. Гипотетический вектор символа с минимальным расстоянием обеспечивают как обнаруженный вектор символа, который является оценкой переданного вектора s символа данных.
является М×1 вектором с М обнаруженными символами. В уравнении (5) идентифицируют минимальное расстояние среди 2К расстояний для 2К гипотетических векторов символа. Гипотетический вектор символа с минимальным расстоянием обеспечивают как обнаруженный вектор символа, который является оценкой переданного вектора s символа данных.
Для обнаружения по методу МП выполняют полный перебор по всем возможным комбинациям символов данных, которые могли быть переданы для вектора s символа данных. Полный перебор рассматривает все 2K возможных гипотез для вектора s символа данных. Следовательно, сложность обнаружения по методу МП находится в экспоненциальной зависимости от количества битов (K), используемых для формирования вектора s символа данных. Обнаружение по методу МП может обеспечивать хорошую эффективность. Однако полный перебор требует большого объема необходимых вычислений и может быть недопустимым для многих приложений. Например, если посылают четыре потока данных, используя QPSK (квадратурную фазовую манипуляцию) для всех потоков, то K=8, и 256 гипотез оценивают для каждого принятого вектора y символа. Однако если 16-QAM (16-позиционную квадратурную амплитудную модуляцию) используют для этих четырех потоков, тогда K=16, и 65536 гипотез оценивают для каждого принятого вектора y символа, что намного сложнее. Если посылают четыре потока данных, используя QPSK, 16-QAM, 64-QAM и 256-QAM, то K=20, и более одного миллиона гипотез оценивают для каждого принятого вектора y символа, что может быть непрактичным. Этот пример иллюстрирует быстрый рост количества гипотез для больших размеров совокупности сигнала.
Количество гипотез для рассмотрения можно сокращать, выполняя сферическое обнаружение (СО), которое также упоминается как сферическое обнаружение списка, сферическое декодирование и т.д. Сферическое обнаружение стремится уменьшить область поиска обнаружения по методу МП с помощью выполнения поиска гипотез-кандидатов и отбрасывания менее вероятных гипотез.
Для сферического обнаружения метрику расстояния в уравнении (4) можно упростить, выполняя QR-разложение матрицы откликов канала MIMO H следующим образом:
 Ур.(6)
Ур.(6)
где Q является R×М ортонормальной матрицей, и R является М×М верхней треугольной матрицей. У ортонормальной матрицы Q существуют ортогональные столбцы и единичный показатель степени для каждого столбца, или  , где «H» обозначает сопряженное транспонирование. Верхняя треугольная матрица R содержит нули ниже диагонали. Структура верхней треугольной матрицы R может использоваться для сокращения количества гипотез для оценки.
, где «H» обозначает сопряженное транспонирование. Верхняя треугольная матрица R содержит нули ниже диагонали. Структура верхней треугольной матрицы R может использоваться для сокращения количества гипотез для оценки.
Уравнение (2) может быть перезаписано следующим образом:

где  является повернутой версией y и
является повернутой версией y и  .
.
Метрику расстояния в уравнении (4) можно перезаписать следующим образом:
Уравнение (9) может быть раскрыто как:
 ,
,
Для М=4 уравнение (10) может быть дополнительно раскрыто следующим образом:
Набор уравнений (11) может быть обобщен для любого значения М следующим образом:

где DMx1=0. Для уравнения (12) индекс i уменьшается с М до 1.
Как показано в уравнениях (10)-(12), метрику расстояния можно вычислять с приращением с помощью М элементов D1-DM. Элемент DM зависит только от гипотетического символа  и представляет расстояние для этого символа. Элемент DM-1 зависит от гипотетических символов
и представляет расстояние для этого символа. Элемент DM-1 зависит от гипотетических символов  и и представляет суммарное расстояние для этих двух символов. Каждый последующий элемент зависит от одного дополнительного гипотетического символа. Элемент D1 зависит от всех М гипотетических символов
и и представляет суммарное расстояние для этих двух символов. Каждый последующий элемент зависит от одного дополнительного гипотетического символа. Элемент D1 зависит от всех М гипотетических символов  по и представляет полное расстояние для всех этих символов. Метрику расстояния можно вычислять с приращением в М уровней, один элемент Di на каждом уровне, начиная с последнего элемента DM на первом уровне. Для каждого уровня Di вычисляют для всех гипотез, применимых для этого уровня.
по и представляет полное расстояние для всех этих символов. Метрику расстояния можно вычислять с приращением в М уровней, один элемент Di на каждом уровне, начиная с последнего элемента DM на первом уровне. Для каждого уровня Di вычисляют для всех гипотез, применимых для этого уровня.
Сферическое обнаружение можно выполнять различным образом. Несколько вариантов осуществления сферического обнаружения описано ниже.
Для полного сферического обнаружения сохраняют все гипотезы с расстояниями, которые равны или меньше порогового значения Dth, а все другие гипотезы отбрасывают. Пороговое значение Dth также называют радиусом сферы. Полное сферическое обнаружение можно выполнять следующим образом. Для первого уровня с i=M формируют список PM с  гипотетическими символами , которые могли быть переданы для символа данных sМ, который генерируют, основываясь на совокупности сигнала, имеющей точек сигнала, например, QAM. DM вычисляют для гипотетических символов в списке PM, как показано в уравнении (12), для получения расстояний. Все гипотетические символы с расстояниями, которые меньше или равны пороговому значению, сохраняют в списке кандидатов CM. Все другие гипотетические символы отбрасывают, что имеет эффект отсечения всех гипотетических векторов
гипотетическими символами , которые могли быть переданы для символа данных sМ, который генерируют, основываясь на совокупности сигнала, имеющей точек сигнала, например, QAM. DM вычисляют для гипотетических символов в списке PM, как показано в уравнении (12), для получения расстояний. Все гипотетические символы с расстояниями, которые меньше или равны пороговому значению, сохраняют в списке кандидатов CM. Все другие гипотетические символы отбрасывают, что имеет эффект отсечения всех гипотетических векторов  символов, содержащих символы, которые отбрасывают.
символов, содержащих символы, которые отбрасывают.
Для второго уровня с i=М-1 формируют список PM-1 с  гипотетическими символами
гипотетическими символами  , которые могли быть переданы для символа sM-1 данных, который генерируют, основываясь на совокупности сигнала, имеющей точек сигнала. DM-1 вычисляют для всех допустимых гипотетических пар символов (,
, которые могли быть переданы для символа sM-1 данных, который генерируют, основываясь на совокупности сигнала, имеющей точек сигнала. DM-1 вычисляют для всех допустимых гипотетических пар символов (,  ) для получения расстояния для этих гипотетических пар символов. Допустимые гипотетические пары символов включают в себя все возможные комбинации каждого символа в списке кандидатов СМ с каждым символом в списке PM-1. Все гипотетические пары символов с расстояниями, меньшими или равными пороговому значению, сохраняют в списке кандидатов CM-1, а все другие гипотетические пары символов отбрасывают.
) для получения расстояния для этих гипотетических пар символов. Допустимые гипотетические пары символов включают в себя все возможные комбинации каждого символа в списке кандидатов СМ с каждым символом в списке PM-1. Все гипотетические пары символов с расстояниями, меньшими или равными пороговому значению, сохраняют в списке кандидатов CM-1, а все другие гипотетические пары символов отбрасывают.
Каждый из остальных уровней можно оценивать подобным способом. Формируют список Pi с  гипотетическими символами
гипотетическими символами  , которые могли быть переданы для символа si данных, который генерируют, основываясь на наличии совокупности точек сигнала. Di вычисляют для всех допустимых гипотетических наборов символов (, …, ) для получения расстояния для этих гипотетических наборов символов. Допустимые гипотетические наборы символов включают в себя все возможные комбинации каждой гипотезы в списке кандидатов Ci+1 с каждым символом в списке Pi. Все гипотетические наборы символов с расстояниями, которые меньше или равны пороговому значению, сохраняют в списке кандидатов Ci, а все другие гипотетические наборы символов отбрасывают. После того, как все М уровней оценены, обнаруженные символы можно определять, основываясь на гипотезах, сохраненных в списке кандидатов C1. Для ясности приведенное выше описание использует различные списки кандидатов для различных уровней. Единый список кандидатов C может также использоваться для всех М уровней и его можно обновлять на каждом уровне.
, которые могли быть переданы для символа si данных, который генерируют, основываясь на наличии совокупности точек сигнала. Di вычисляют для всех допустимых гипотетических наборов символов (, …, ) для получения расстояния для этих гипотетических наборов символов. Допустимые гипотетические наборы символов включают в себя все возможные комбинации каждой гипотезы в списке кандидатов Ci+1 с каждым символом в списке Pi. Все гипотетические наборы символов с расстояниями, которые меньше или равны пороговому значению, сохраняют в списке кандидатов Ci, а все другие гипотетические наборы символов отбрасывают. После того, как все М уровней оценены, обнаруженные символы можно определять, основываясь на гипотезах, сохраненных в списке кандидатов C1. Для ясности приведенное выше описание использует различные списки кандидатов для различных уровней. Единый список кандидатов C может также использоваться для всех М уровней и его можно обновлять на каждом уровне.
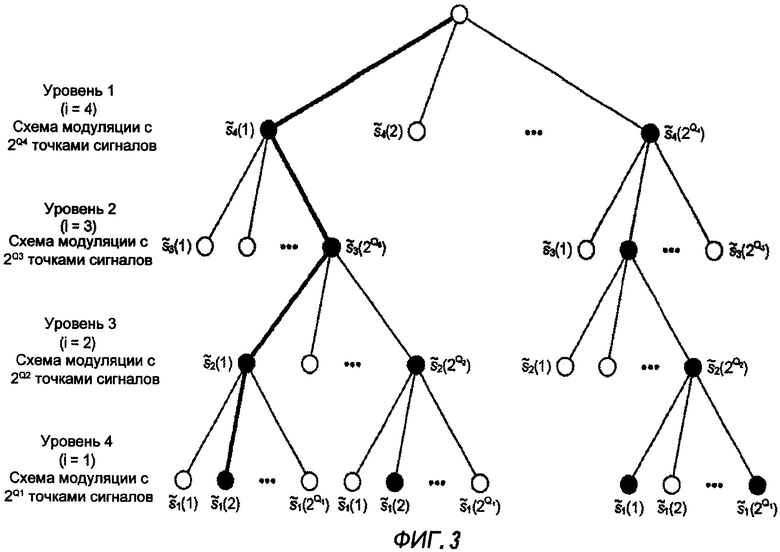
Фиг.3 показывает примерное дерево поиска для сферического обнаружения символов данных, которые могут быть сгенерированы с помощью различных схем модуляции. В этом примере M=4 и вычисляют четыре элемента D1-D4. Для первого уровня с i=4, D4 вычисляют для  гипотез для
гипотез для  возможных символов данных, которые возможно были переданы для символа s4 данных.
возможных символов данных, которые возможно были переданы для символа s4 данных.  гипотетических символов обозначены как
гипотетических символов обозначены как  (1)-
(1)- (
( ) на фиг.3. Две гипотезы имеют расстояния, которые меньше или равны пороговому значению, и они показаны с помощью узлов, закрашенных черным. Для второго уровня с i=3, D3 вычисляют для
) на фиг.3. Две гипотезы имеют расстояния, которые меньше или равны пороговому значению, и они показаны с помощью узлов, закрашенных черным. Для второго уровня с i=3, D3 вычисляют для  гипотез для
гипотез для  возможных пар символов, которые могли быть переданы для символов s3 и s4 данных. Снова, две гипотезы имеют расстояния, которые меньше или равны пороговому значению, и они показаны с помощью узлов, закрашенных черным. Для третьего уровня с i=2, D2 вычисляют для
возможных пар символов, которые могли быть переданы для символов s3 и s4 данных. Снова, две гипотезы имеют расстояния, которые меньше или равны пороговому значению, и они показаны с помощью узлов, закрашенных черным. Для третьего уровня с i=2, D2 вычисляют для  гипотез для
гипотез для  возможных наборов символов, которые могли быть переданы для символов s2, s3 и s4 данных. Три гипотезы имеют расстояния, которые меньше или равны пороговому значению, и они показаны с помощью узлов, закрашенных черным. Для последнего уровня с i=1, D1 вычисляют для
возможных наборов символов, которые могли быть переданы для символов s2, s3 и s4 данных. Три гипотезы имеют расстояния, которые меньше или равны пороговому значению, и они показаны с помощью узлов, закрашенных черным. Для последнего уровня с i=1, D1 вычисляют для  гипотез для
гипотез для  возможных наборов символов, которые могли быть переданы для символов s1, s2, s3 и s4 данных. Четыре гипотезы имеют расстояния, которые меньше или равны пороговому значению, и они показаны с помощью узлов, закрашенных черным. Набор символов с наименьшим расстоянием показан «жирной» линией.
возможных наборов символов, которые могли быть переданы для символов s1, s2, s3 и s4 данных. Четыре гипотезы имеют расстояния, которые меньше или равны пороговому значению, и они показаны с помощью узлов, закрашенных черным. Набор символов с наименьшим расстоянием показан «жирной» линией.
Для частичного сферического обнаружения Nbs лучших гипотетических символов сохраняют для каждого уровня и используют для формирования гипотезы для следующего уровня. Как показано в наборе уравнений (11), QR-разложение позволяет обнаруживать символ s4 данных отдельно, удаляя помехи из других символов данных. Обнаружение следующего символа данных s3 основано на удалении помех из символа s4 данных. Эти помехи задают как  в уравнении (11b). И точность оценки помех, и эффективность подавления помех, обе зависят от того, является ли символ
в уравнении (11b). И точность оценки помех, и эффективность подавления помех, обе зависят от того, является ли символ  допустимым. Если
допустимым. Если  =s4 и нет никаких ошибок в оценках канала, то помехи от символа s4 данных можно полностью подавлять при обнаружении символа s3 данных.
=s4 и нет никаких ошибок в оценках канала, то помехи от символа s4 данных можно полностью подавлять при обнаружении символа s3 данных.
В одном или большем количестве вариантов осуществления количество лучших гипотетических символов (Nbs) для сохранения для каждого уровня является фиксированным значением, например, 2, 3, 4 и т.д. В других вариантах осуществления Nbs является конфигурируемым значением, которое может зависеть от размера совокупности для символа si данных, который обнаруживают, качества сигнала или другой информации о состоянии канала для символа si данных и/или от некоторых других критериев. Качество сигнала можно определять количественно с помощью отношения сигнал-шум (ОСШ, SNR), отношения «сигнал к шуму и помехам» (SINR), отношения «энергия на символ к общему шуму» (Ec/N0) и т.д. Например, Nbs можно устанавливать в четверть размера совокупности сигнала, Nbs= /4, или использовать некоторый другой процент. Nbs можно выбирать таким образом, чтобы вероятность переданного символа данных, являющегося среди Nbs лучших гипотетических символов, соответствовала или превышала некоторый предопределенный процент, например, 95% или некоторый другой процент.
/4, или использовать некоторый другой процент. Nbs можно выбирать таким образом, чтобы вероятность переданного символа данных, являющегося среди Nbs лучших гипотетических символов, соответствовала или превышала некоторый предопределенный процент, например, 95% или некоторый другой процент.
Для ограниченного сферического обнаружения один лучший гипотетический символ сохраняют для каждого уровня, и его упоминают как «жесткое» решение для этого уровня. Ограниченное сферическое обнаружение является особым случаем частичного сферического обнаружения с Nbs=1. «Жесткое» решение для каждого уровня можно задавать как:
где  является «жестким» решением для передаваемого символа si данных. В уравнении (13) гипотетический символ
является «жестким» решением для передаваемого символа si данных. В уравнении (13) гипотетический символ  , который создает минимальное расстояние для Di, обеспечивают как «жесткое» решение для символа si данных. «Жесткое» решение для каждого уровня можно продвигать к следующему уровню и использовать для вычисления расстояния для следующего уровня.
, который создает минимальное расстояние для Di, обеспечивают как «жесткое» решение для символа si данных. «Жесткое» решение для каждого уровня можно продвигать к следующему уровню и использовать для вычисления расстояния для следующего уровня.
Метрика расстояния в уравнении (12) может в таком случае быть выражена как:
Элемент суммирования уравнения (14) можно рассматривать в качестве помехи от предшествующих обнаруженных символов. В этом случае измененный принимаемый символ  , полученный после подавления помех, может быть выражен как:
, полученный после подавления помех, может быть выражен как:

Метрику расстояния в уравнении (14) можно затем перезаписать как:

В качестве примера, если посылают два потока данных, и  , и
, и  , то расстояние для символа s2 данных может быть выражено как:
, то расстояние для символа s2 данных может быть выражено как:
Расстояние для символа s1 данных можно затем выразить как:

где  .
.
Для частичного и ограниченного сферического обнаружения количество гипотез для оценки на каждом уровне после первого уровня можно существенно уменьшать с помощью сохранения Nbs лучших гипотетических символов для каждого уровня. Для ограниченного сферического обнаружения одно «жесткое» решение переносят на следующий уровень для каждого уровня, и количество гипотез для оценки на каждом уровне равно  . Для второго уровня различные гипотетические символы
. Для второго уровня различные гипотетические символы  и «жесткое» решение
и «жесткое» решение  можно оценивать вместо различных гипотетических пар символов (,
можно оценивать вместо различных гипотетических пар символов (,  ). Для третьего уровня различные гипотетические символы
). Для третьего уровня различные гипотетические символы  и «жесткие» решения и
и «жесткие» решения и  можно оценивать вместо различных гипотетических наборов символов (, , ).
можно оценивать вместо различных гипотетических наборов символов (, , ).
Схема ограниченного сферического обнаружения зависит от расстояний, вычисленных с использованием «жестких» решений для уже обнаруженных символов данных, как показано в уравнении (14). Эффективность ограниченного сферического обнаружения, таким образом, зависит от надежности «жестких» решений. Надежность «жестких» решений для заданных потоков данных зависит от схемы модуляции и качества сигнала данного потока. В одном или большем количестве вариантов осуществления порядок обнаружения выбирают, основываясь на ожидаемых вероятностях символов или частоте появления ошибочных символов (SER, ЧПОС) для потоков данных. ЧПОС для каждого потока данных можно оценивать или определять, основываясь на информации о состоянии канала. В данном варианте осуществления обнаружение сначала выполняют для потока данных с наименьшей ЧПОС. Данный поток данных должен иметь наибольший энергетический запас линии связи по отношению к качеству некодированного сигнала, например, ОСШ, требуемому для схемы модуляции, используемой для данного потока данных. Затем обнаружение выполняют для потока данных со следующей самой маленькой ЧПОС, и т.д. Данное упорядочивание обнаружения уменьшает распространение ошибочных символов от ранее обнаруженных потоков в вычисление расстояний для потоков, обнаруживаемых позднее. Скорость для каждого потока данных можно выбирать для достижения желаемой ЧПОС.
Скорость или формат пакета можно выбирать для каждого потока данных, основываясь на его качестве сигнала, как описано ниже. Скорость может быть связана с конкретной спектральной эффективностью, которую можно задавать в единицах битов в секунду на герц (бит/сек/Гц). Данную скорость можно достигать с помощью различных комбинаций схем модуляции и скорости кодирования. Например, скорости 3 бит/сек/Гц можно достигать с помощью (1) скорости кодирования 3/4 и 16-QAM, (2) скорости кодирования 1/2 и 64-QAM или (3) скорости кодирования 3/8 и 256-QAM. Эти различные комбинации скорости кодирования и схемы модуляции могут потребовать немного другого качеств сигналов для достижения целевой частоты появления ошибок пакета (PЕR). Однако у этих различных комбинаций скорости кодирования и схемы модуляции могут быть существенно отличающиеся ЧПОС. Для данного качества сигнала ЧПОС для 16-QAM ниже ЧПОС для 64-QAM, которая ниже ЧПОС для 256-QAM. Последовательно более высокие ЧПОС для 16-QAM, 64-QAM и 256-QAM учитывают с помощью последовательно более сильных кодов (или более низких скоростей кодирования) для 16-QAM, 64-QAM и 256-QAM.
На эффективность ограниченного сферического обнаружения влияет ЧПОС для более ранних потоков данных (например, первого потока данных), которые будут обнаруживать. Скорость для каждого из ранее обнаруженных потоков можно выбирать для достижения целевой ЧПОС или ниже. Эта целевая ЧПОС может составлять 5%, 10% или некоторое другое значение. В одном или большем количестве вариантов осуществления, если ЧПОС для более раннего (например, первого) обнаруженного потока превышает целевую ЧПОС, то скорость для потока уменьшают до самой высокой скорости при схеме модуляции более низкого порядка, что затем уменьшает распространение ошибок для подавления помех. Выбор схемы модуляции более низкого порядка может уменьшать пропускную способность ранее обнаруженного потока, но может улучшать пропускные способности позже обнаруженных потоков. Компьютерное моделирование показывает, что эта стратегия выбора скорости может улучшать полную пропускную способность для определенных условий в канале, например, с высоким ОСШ.
Для описанных выше схем сферического обнаружения количество гипотез-кандидатов для хранения в списке C можно обрезать по-разному. В одном или большем количестве вариантов осуществления сохраняют все гипотезы с расстояниями, которые меньше или равны пороговому значению Dth. Для данного варианта осуществления количество гипотез-кандидатов для хранения на каждом уровне не обязательно постоянно. В других вариантах осуществления количество гипотез-кандидатов для сохранения на каждом уровне может быть функцией ожидаемой ЧПОС, которая зависит от схемы модуляции и качества сигнала обнаруживаемого потока данных. В других вариантах осуществления Nbl лучших гипотез сохраняют на каждом уровне. В других вариантах осуществления до Nbl лучших гипотез с расстояниями, которые меньше или равны пороговому значению Dth, сохраняют на каждом уровне. В других вариантах осуществления Nbn лучших гипотез сохраняют для каждого узла. В других вариантах осуществления до Nbn лучших гипотез с расстояниями, которые меньше или равны пороговому значению Dth, сохраняют для каждого узла. Nbl и Nbn можно выбирать, основываясь на компромиссе между эффективностью обнаружения, сложностью и/или другими рассматриваемыми факторами. Например, Nbl и Nbn можно выбирать, основываясь на размере совокупности сигнала так, чтобы больше гипотез-кандидатов было сохранено для больших совокупностей сигнала. Nbl и Nbn можно также ограничивать так, чтобы они были равны или больше некоторого минимального значения (например, Nmin=2), что гарантирует, что, по меньшей мере, Nmin гипотез-кандидатов сохраняют для каждого уровня или узла. В общем случае любое количество гипотез можно сохранять в списке кандидатов C.
После завершения сферического обнаружения логарифмические отношения правдоподобия (ЛОП, LLR) можно вычислять для битов кода, основываясь на гипотезах-кандидатах в списке C, следующим образом:
где  является битовым вектором, соответствующим гипотетическому вектору
является битовым вектором, соответствующим гипотетическому вектору  символа;
символа;
 является вектором со всеми битами кода в векторе , за исключением бита кода bk;
является вектором со всеми битами кода в векторе , за исключением бита кода bk;
 является вектором с заранее известными ЛОП для всех битов кода в ;
является вектором с заранее известными ЛОП для всех битов кода в ;
 является подмножеством списка кандидатов C и содержит гипотезы, для которых bk=+1;
является подмножеством списка кандидатов C и содержит гипотезы, для которых bk=+1;
 является подмножеством списка кандидатов C и содержит гипотезы, для которых bk=-1; и
является подмножеством списка кандидатов C и содержит гипотезы, для которых bk=-1; и
Le(bk) является внешним ЛОП для бита кода bk.
В общем случае обнаруженные символы можно обеспечивать как ЛОП или в некоторой другой форме.
Уравнение (18) можно оценивать для каждого бита кода в переданном битовом векторе b. Для каждого бита кода bk можно рассматривать все гипотетические векторы  символа в списке кандидатов C. У каждого гипотетического вектора
символа в списке кандидатов C. У каждого гипотетического вектора  символа существует соответствующий гипотетический битовый вектор
символа существует соответствующий гипотетический битовый вектор  . Для уравнения (18) выражение в пределах операции max (определения максимального значения) вычисляют для каждого гипотетического битового вектора
. Для уравнения (18) выражение в пределах операции max (определения максимального значения) вычисляют для каждого гипотетического битового вектора  для получения результата для этого битового вектора. Идентифицируют наибольший результат для всех гипотетических битовых векторов с bk=+1. Также идентифицируют наибольший результат для всех гипотетических битовых векторов с bk=-1. ЛОП для бита кода bk равен разности между наибольшим результатом для bk=+1 и наибольшим результатом для bk=-1.
для получения результата для этого битового вектора. Идентифицируют наибольший результат для всех гипотетических битовых векторов с bk=+1. Также идентифицируют наибольший результат для всех гипотетических битовых векторов с bk=-1. ЛОП для бита кода bk равен разности между наибольшим результатом для bk=+1 и наибольшим результатом для bk=-1.
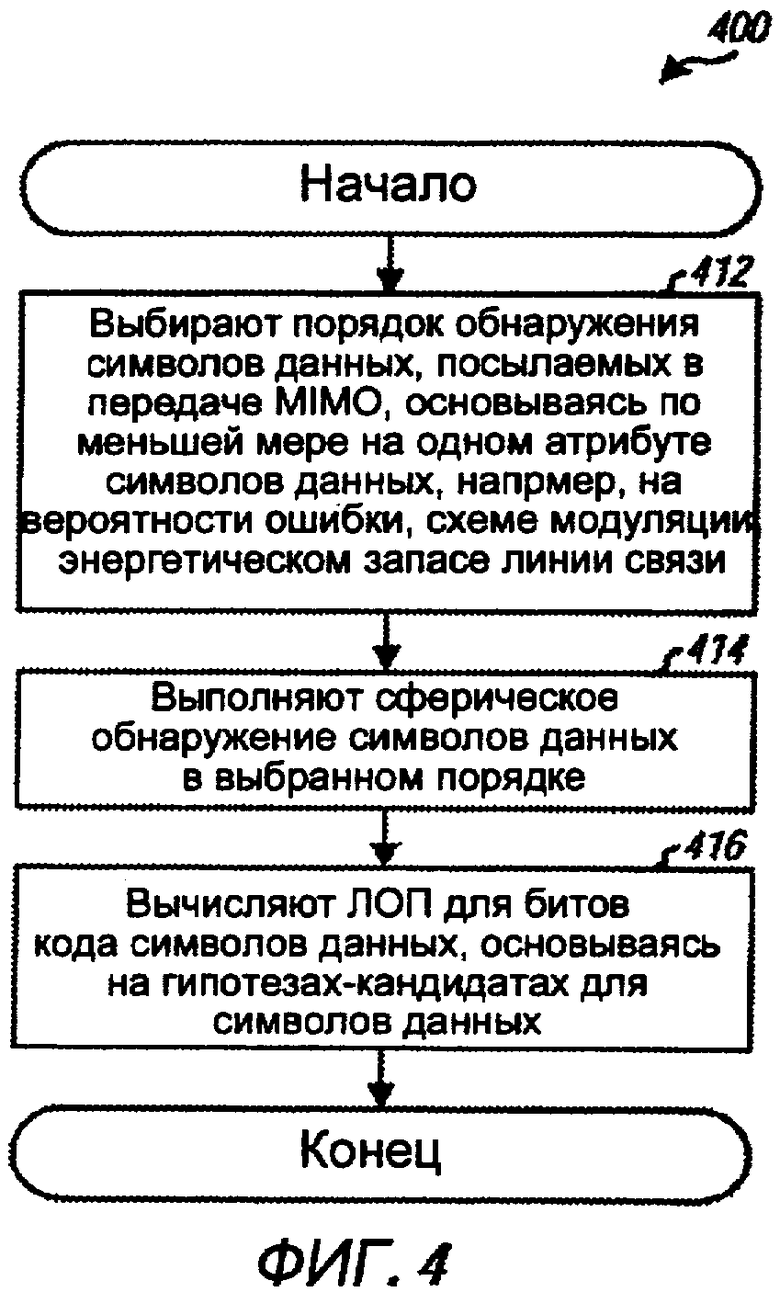
Фиг.4 показывает аспекты процесса 400 выполнения сферического обнаружения. Порядок обнаружения символов данных, посылаемых в передаче MIMO, выбирают, основываясь на, по меньшей мере, одном атрибуте символов данных (этап 412). В одном или большем количестве вариантов осуществления порядок выбирают, основываясь на вероятностях ошибки для символов данных, начиная с символа данных, имеющего самую низкую вероятность ошибки. В других вариантах осуществления порядок выбирают, основываясь на схемах модуляции символов данных, начиная с символа данных, имеющего схему модуляции самого низкого порядка. В других вариантах осуществления порядок выбирают, основываясь на энергетических запасах линии связи для символов данных, начиная с символа данных, имеющего наибольший энергетический запас линии связи.
Выполняют сферическое обнаружение символов данных в выбранном порядке (этап 414). Для сферического обнаружения матрицу откликов канала можно разлагать для получения верхней треугольной матрицы. Символы данных можно обнаруживать по одному в выбранном порядке. Для каждого символа данных расстояния для множества гипотез символа данных можно вычислять, основываясь на принятых символах, верхней треугольной матрице и гипотезах-кандидатах и/или «жестких» решениях для уже обнаруженных символов данных. Гипотезы-кандидаты для символов данных определяют, основываясь на вычисленных расстояниях. ЛОП для битов кода символов данных вычисляют, основываясь на гипотезах-кандидатах (этап 416).
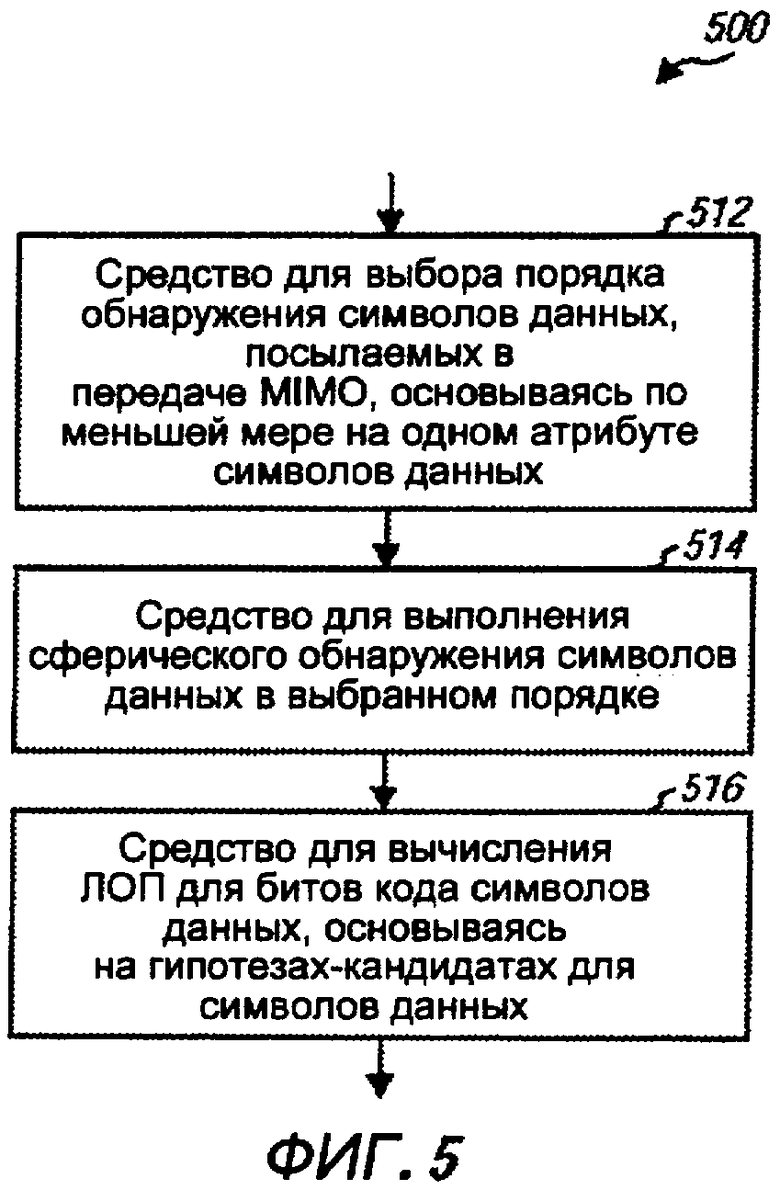
Фиг.5 показывает аспекты устройства 500 для выполнения сферического обнаружения. Устройство 500 включает в себя средство выбора порядка обнаружения символов данных, посылаемых в передаче MIMO, основываясь на, по меньшей мере, одном атрибуте символов данных, например, на вероятностях ошибки, на схемах модуляции и/или на энергетических запасах линии связи (блок 512), средство выполнения сферического обнаружения символов данных в выбранном порядке (блок 514) и средство вычисления ЛОП для битов кода символов данных, основываясь на гипотезах-кандидатах от сферического обнаружения (блок 516).
Фиг.6 показывает аспекты процесса 600 выполнения сферического обнаружения. Порядок обнаружения символов данных, посылаемых в передаче MIMO, выбирают, например, основываясь на вероятностях ошибки, схемах модуляции, энергетических запасах линии связи и т.д. (этап 612). Затем выполняют сферическое обнаружение над принятыми символами для обнаружения символов данных, сгенерированных с помощью, по меньшей мере, двух схем модуляции (этап 614). Сферическое обнаружение можно выполнять, основываясь на схемах модуляции, используемых для символов данных. В одном или большем количестве вариантов осуществления количество гипотез для оценки каждого символа данных определяют, основываясь на схеме модуляции символа данных. В других вариантах осуществления количество гипотез для сохранения для каждого символа данных определяют, основываясь на схеме модуляции символа данных. ЛОП для битов кода символов данных вычисляют, основываясь на гипотезах-кандидатах для символов данных (этап 616).
Фиг.7 показывает аспекты устройства 700 для выполнения сферического обнаружения. Устройство 700 включает в себя средство выбора порядка обнаружения символов данных, посылаемых в передаче MIMO (блок 712), средство выполнения сферического обнаружения над принятыми символами для обнаружения символов данных, сгенерированных с помощью, по меньшей мере, двух схем модуляции (блок 714), и средство вычисления ЛОП для битов кода символов данных, основываясь на гипотезах-кандидатах для символов данных (блок 716).
2. Выбор скорости
Скорость или формат пакета можно выбирать для каждого потока данных для достижения целевого уровня эффективности, который можно определять количественно с помощью целевой PER (частоты ошибок при передаче пакетов), например, 1% PER. Скорость для каждого потока данных можно выбирать, основываясь на информации о состоянии канала, например, качестве сигнала потока данных, который можно оценивать, как описано ниже.
Для сферического обнаружения с помощью QR-разложения качество сигнала, например, ОСШ, каждого потока данных может зависеть от порядка, в котором обнаруживают поток. Для простого случая с двумя потоками данных, с потоком 2, который обнаруживают сначала, за которым следует обнаружение потока 1, ОСШ каждого потока данных может быть выражено как:

где  и
и  являются ОСШ потоков 1 и 2 соответственно со сферическим обнаружением.
являются ОСШ потоков 1 и 2 соответственно со сферическим обнаружением.
Приемник может также воплощать схему последовательного подавления помех (ППП, SIC) и может выполнять пространственную согласованную фильтрацию и последовательное подавление помех, используя «жесткие» решения. Для схемы ППП приемник восстанавливает М потоков данных за М этапов, один поток данных за каждый этап, и оценивает и подавляет помехи, вызванные каждым восстановленным потоком данных. В течение первого этапа приемник выполняет пространственную согласованную фильтрацию принятых символов y и получает обнаруженные символы для одного потока данных. Пространственная согласованная фильтрация может быть основана на методиках обращения в нуль незначащих коэффициентов (ZF), минимальной среднеквадратической ошибки (MMSE), объединения максимальных коэффициентов (MRC) или на некоторой другой методике. Для подавления кодированных помех приемник обрабатывает (например, выполняет обратное символьное отображение, обратное перемежение и декодирование) обнаруженные символы для получения декодированных данных и дополнительно обрабатывает (например, кодирует, перемежает и демодулирует) декодированные данные для получения повторно модулированных символов, которые являются оценками для символов данных, только декодированных. Приемник дополнительно обрабатывает повторно модулированные символы с оценками канала и получает компоненты помех i М из-за восстановленного потока данных. Компоненты помех i M затем вычитают из принятых символов y для получения измененных принятых символов y M-1, имеющих удаленные компоненты помех. Измененные принятые символы y M-1 затем обрабатывают с помощью следующего этапа.
Схема ограниченного сферического обнаружения эквивалентна схеме ППП с подавлением незакодированных помех. Для ограниченного сферического обнаружения «жесткие» решения получают для символов данных sj+1-sM и используют для подавления помех. Измененный принятый символ  основан на «жестких» решениях
основан на «жестких» решениях  -
- для уже обнаруженных символов данных, как показано в уравнении (15). В идеале желательно выполнять подавление помех, используя повторно модулированные символы, сгенерированные с выхода декодера, так как эти символы имеют тенденцию быть более надежными, чем «жесткие» решения. Однако во многих случаях повторно модулированные символы не доступны из-за сложности обработки и/или времени ожидания.
для уже обнаруженных символов данных, как показано в уравнении (15). В идеале желательно выполнять подавление помех, используя повторно модулированные символы, сгенерированные с выхода декодера, так как эти символы имеют тенденцию быть более надежными, чем «жесткие» решения. Однако во многих случаях повторно модулированные символы не доступны из-за сложности обработки и/или времени ожидания.
Можно провести параллель между сферическим обнаружением и схемой ППП. ОСШ потоков данных, обнаруженных с помощью сферического обнаружения, можно оценивать с помощью ОСШ потоков данных, восстановленных с помощью схемы ППП. Для схемы ППП, вектор пространственной фильтрации можно получать для потока данных m, основываясь на методике обращения в нуль незначащих коэффициентов (ZF) или MMSE, следующим образом:

где H m является R×m сокращенной матрицей откликов канала для потока данных m;
h m является R×1 вектором откликов канала для потока данных m; и
m zf,m и m mmse,m являются R×1 векторами пространственной фильтрации для потока данных m для методик обращения в нуль незначащих коэффициентов и MMSE соответственно.
H m содержит m столбцов H для m потоков данных, еще не обнаруженных, с М-m столбцов H для потоков данных, уже обнаруженных на предшествующих этапах удаления.
Обнаруженный символ для потока данных m  можно выражать как:
можно выражать как:
где y m является R×1 вектором измененных принятых символов для этапа m; и
m m может быть равным m zf,m или m mmse,m.
ОСШ потока данных m для схемы ППП можно выражать как:

где  и
и  - ОСШ потока данных m для методик обращения в нуль незначащих коэффициентов и MMSE соответственно. ОСШ, вычисленные для потоков данных, основываясь на схеме ППП с помощью методик обращения в нуль незначащих коэффициентов или MMSE, могут использоваться для выбора скоростей для потоков данных, обнаруженных с помощью сферического обнаружения.
- ОСШ потока данных m для методик обращения в нуль незначащих коэффициентов и MMSE соответственно. ОСШ, вычисленные для потоков данных, основываясь на схеме ППП с помощью методик обращения в нуль незначащих коэффициентов или MMSE, могут использоваться для выбора скоростей для потоков данных, обнаруженных с помощью сферического обнаружения.
Может быть показано, что для случая с двумя потоками данных и совершенным подавлением помех,  для обнаружения второго потока данных с помощью схемы ППП равен
для обнаружения второго потока данных с помощью схемы ППП равен  для обнаружения второго потока данных с помощью сферического обнаружения.
для обнаружения второго потока данных с помощью сферического обнаружения.  потока данных, обнаруженного сначала с помощью схемы ППП, является почти тем же самым, что и
потока данных, обнаруженного сначала с помощью схемы ППП, является почти тем же самым, что и  для потока данных, обнаруженного сначала с помощью сферического обнаружения с высоким ОСШ. Таким образом, скорости для потоков данных, обнаруженных с помощью сферического обнаружения, можно выбирать, основываясь на ОСШ, вычисленных для потоков данных с помощью схемы MMSE-ППП.
для потока данных, обнаруженного сначала с помощью сферического обнаружения с высоким ОСШ. Таким образом, скорости для потоков данных, обнаруженных с помощью сферического обнаружения, можно выбирать, основываясь на ОСШ, вычисленных для потоков данных с помощью схемы MMSE-ППП.
Качества сигналов потоков данных, обнаруженных с помощью сферического обнаружения, можно также оценивать другими способами. Оцененные качества сигналов для потоков данных можно использовать для выбора надлежащих скоростей для потоков данных.
В одном или большем количестве вариантов осуществления система поддерживает набор скоростей или форматов пакета. Каждая поддерживаемая скорость может быть связана с определенной спектральной эффективностью, определенной скоростью кодирования, определенной схемой модуляции и определенным минимальным ОСШ, требуемым для достижения целевой PER для AWGN канала без замираний. Поддерживаемые скорости и необходимые ОСШ можно сохранять в поисковой таблице. Скорость для каждого потока данных можно выбирать независимо, основываясь на ОСШ, вычисленном для этого потока.
В других вариантах осуществления данная система поддерживает набор квантованных по векторам скоростей, который можно также называть набором схем модуляции кодирования (MCS). Набор квантованных по векторам скоростей содержит только определенные комбинации скоростей. Скорости для М потоков данных можно выбирать совместно из числа комбинаций скоростей в наборе скоростей.
Для обоих вариантов осуществления различные скорости можно выбирать для различных потоков данных, основываясь на качествах сигналов и/или других факторах. Способность использовать различные скорости для потоков данных может улучшать полную пропускную способность.
В одном или большем количестве вариантов осуществления скорости для потоков данных, обнаруженных с помощью сферического обнаружения, можно выбирать итерационным способом. Начальные скорости для потоков данных можно выбирать, основываясь на качествах сигналов. Если ЧПОС для ранее обнаруженного потока выше целевой ЧПОС, тогда другую скорость со схемой модуляции более низкого порядка можно выбирать для потока и полную пропускную способность можно определять для всех потоков. Комбинацию скоростей с самой высокой полной пропускной способностью для всех потоков данных можно выбирать для использования.
Фиг.8 показывает аспекты процесса 800 выбора скоростей для потоков данных. Сферическое обнаружение выполняют для множества потоков данных (этап 812). Информацию о состоянии канала получают для потоков данных, обнаруженных с помощью сферического обнаружения (этап 814). Информация о состоянии канала может содержать оценки канала (например, матрицу откликов канала), оценки шума, оценки помех, измерения мощности, оценки качества сигнала и/или другую информацию.
Скорости для потоков данных выбирают, основываясь на информации о состоянии канала (этап 816). В одном или большем количестве вариантов осуществления скорости для потоков данных выбирают, основываясь на качествах сигналов (например, ОСШ) потоков данных, которые можно оценивать, основываясь на информации о состоянии канала. Качества сигналов для потоков данных могут быть оценками, основанными на верхней треугольной матрице, используемой для сферического обнаружения. Верхнюю треугольную матрицу можно получать из матрицы откликов канала, которая может быть частью информации о состоянии канала. Качество сигнала каждого потока данных можно также оценивать, основываясь на схеме ППП с предположением, что подавляют помехи от уже обнаруженных потоков данных. Скорость для каждого потока данных можно выбирать независимо. Скорости для всех потоков данных можно также выбирать совместно. Скорость для потока данных (например, первого потока данных, который будут обнаруживать) можно выбирать для достижения целевой ЧПОС, или лучше, для этого потока данных. Начальную скорость для потока данных можно выбирать, основываясь на его оцененном качестве сигнала, и измененную скорость со схемой модуляции более низкого порядка можно выбирать, если начальная скорость приводит к тому, что поток данных превышает целевую ЧПОС.
Фиг.9 показывает аспекты устройства 900 для выбора скоростей для потоков данных. Устройство 900 включает в себя средство выполнения сферического обнаружения для множества потоков данных (блок 912), средство получения информации о состоянии канала для потоков данных (блок 914) и средство выбора скоростей для потоков данных, основываясь на информации о состоянии канала (блок 916). Скорость для одного или большего количества потоков данных можно выбирать для достижения целевой ЧПОС, или лучше.
Фиг.10 показывает структурную схему аспектов RX пространственного процессора 160 и RX процессора 170 данных в приемнике 150. В пределах RX пространственного процессора 160 блок 1010 вычисления принимает оценки канала H от канального процессора 194 и получает ортонормальную матрицу Q и верхнюю треугольную матрицу R. Блок 1020 сферического обнаружения выполняет сферическое обнаружение над принятыми символами y от R блоков 154a-154r приемника с помощью матриц Q и R и обеспечивает передачу обнаруженных символов, или гипотез-кандидатов. Блок 1020 сферического обнаружения может выполнять обнаружение в порядке, определенном контроллером 190. Блок 1020 сферического обнаружения может принимать «жесткие» решения для обнаруженных символов и может вычислять расстояния, основываясь на «жестких» решениях. Блок 1020 сферического обнаружения может рассматривать все гипотезы для каждого символа данных, или, если выполняется пространственная согласованная фильтрация, может рассматривать только подмножество гипотез, которые находятся близко к обнаруженному символу, обеспеченному с помощью пространственной согласованной фильтрации. Блок 1030 вычисления ЛОП вычисляет ЛОП для битов кода, основываясь на обнаруженном символе или гипотезах-кандидатах от блока 1020 сферического обнаружения.
В пределах RX процессора 170 данных М блоков 1040a-1040m канального обратного перемежения принимают ЛОП для М потоков данных от блока 1030 вычисления ЛОП. Каждый блок 1040 канального обратного перемежения выполняет обратное перемежение ЛОП для своего потока способом, дополнительным к перемежению, выполняемому с помощью блока 226 канального перемежения для этого потока. Мультиплексор 1050 мультиплексирует, или преобразовывает в последовательную форму, обратно перемеженные ЛОП от блоков 1040a-1040m канального обратного перемежения. Декодер 1060 декодирует обратно перемеженные ЛОП и обеспечивает передачу декодированных данных.
Описанные методики можно воплощать с помощью различных средств. Например, эти методики можно воплощать в аппаратных средствах, встроенном программном обеспечении, программном обеспечении или в их комбинации. При аппаратном воплощении блоки обработки, используемые для выполнения обнаружения, выбора скорости и т.д. можно воплощать в пределах одной или большего количества специализированных интегральных схем (СпИС), процессоров цифровой обработки сигналов (ПЦОС), устройств цифровой обработки сигналов (УЦОС), программируемых логических устройств (ПЛУ), программируемых пользователем вентильных матриц (ППВМ), процессоров, контроллеров, микроконтроллеров, микропроцессоров, электронных устройств, других электронных блоков, предназначенных для выполнения описанных функций, или в их комбинации.
При воплощении с помощью встроенного программного обеспечения и/или программного обеспечения данные методики можно воплощать с помощью модулей (например, процедур, функций и т.д.), которые выполняют описанные функции. Встроенное программное обеспечение и/или программные коды могут храниться в памяти (например, в памяти 192 на фиг.1) и выполняться процессором (например, процессором 190). Память можно воплощать в пределах процессора или вне процессора.
Предыдущее описание раскрытых вариантов осуществления обеспечивают для предоставления возможности любому специалисту изготавливать или использовать настоящее изобретение. Различные модификации этих вариантов осуществления будут вполне очевидны для специалистов, и определенные в данной работе универсальные принципы можно применять к другим вариантам осуществления, не отступая от объема или формы изобретения. Таким образом, настоящее изобретение не ограничено показанными вариантами осуществления, но должно соответствовать самой широкой форме, совместимой с раскрытыми принципами и новыми особенностями.
Изобретение относится к области связи и может использоваться для выполнения детектирования и выбора скорости для передачи с множеством входов и множеством выходов (MIMO). Описаны методики выполнения сферического детектирования для восстановления символов данных, посылаемых в MIMO-передаче путем сферического детектирования символов данных, сгенерированных с помощью, по меньшей мере, двух схем модуляции или символов данных в порядке, определенном, основываясь на, по меньшей мере, одном атрибуте символов данных, которые могут быть вероятностями ошибки, схемами модуляции и/или энергетическими запасами линии связи для символов данных. В еще одном аспекте скорости для множества потоков данных выбирают, основываясь на информации о состоянии канала, о качестве сигналов множества потоков данных. 12 н. и 30 з.п. ф-лы, 10 ил.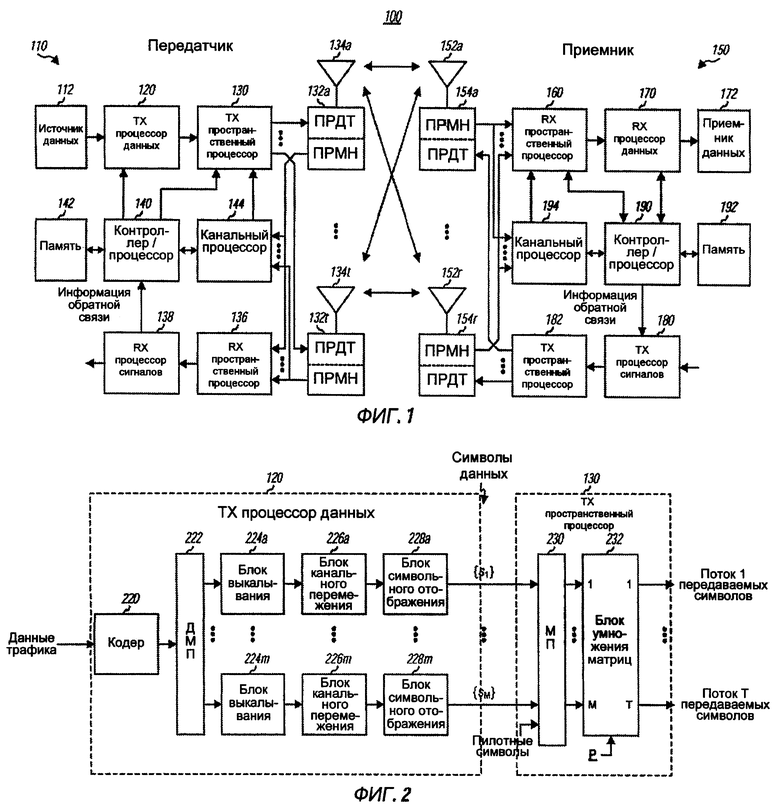
1. Устройство восстановления символов данных, посылаемых в MIMO-передаче (передача в системе с множеством входов и множеством выходов), содержащее: по меньшей мере, один процессор, сконфигурированный для выбора порядка детектирования символов данных, посылаемых в MIMO-передаче, основываясь на, по меньшей мере, одном атрибуте символов данных, и для выполнения сферического детектирования символов данных в выбранном порядке; причем, по меньшей мере, один атрибут соответствует схемам модуляции или энергетическим запасам линии связи или их комбинации для символов данных, и память, соединенную с, по меньшей мере, одним процессором.
2. Устройство по п.1, в котором, по меньшей мере, один атрибут соответствует схемам модуляции для символов данных, и в котором, по меньшей мере, один процессор конфигурируют для выбора порядка, основываясь на схемах модуляции для символов данных, начиная с символа данных, имеющего схему модуляции самого низкого порядка.
3. Устройство по п.1, в котором, по меньшей мере, один атрибут содержит энергетические запасы линии связи для символов данных, и в котором, по меньшей мере, один процессор конфигурируют для выбора порядка, основываясь на энергетических запасах линии связи для символов данных, начиная с символа данных, имеющего наибольший энергетический запас линии связи.
4. Устройство по п.1, в котором, по меньшей мере, один процессор конфигурируют для разложения матрицы откликов канала для получения верхней треугольной матрицы для выбранного порядка, для вычисления расстояний для множества гипотез для каждого символа данных, основываясь на верхней треугольной матрице, и для определения гипотез-кандидатов для символов данных, основываясь на вычисленных расстояниях.
5. Устройство по п.1, в котором, по меньшей мере, один процессор конфигурируют для идентификации, по меньшей мере, одного гипотетического символа для каждого символа данных и для определения гипотез-кандидатов для символов данных, основываясь на, по меньшей мере, одном гипотетическом символе для каждого символа данных.
6. Устройство по п.1, в котором, по меньшей мере, один процессор конфигурируют для получения, по меньшей мере, одного «жесткого» решения для, по меньшей мере, одного символа данных и для определения гипотез-кандидатов для символов данных с помощью, по меньшей мере, одного «жесткого» решения.
7. Устройство по п.1, в котором символы данных содержат первый и второй символы данных, и в котором, по меньшей мере, один процессор конфигурируют для вычисления первого набора, по меньшей мере, одного расстояния для, по меньшей мере, одной гипотезы для первого символа данных, для получения первого «жесткого» решения для первого символа данных, основываясь на первом наборе, по меньшей мере, одного расстояния, и для вычисления второго набора, по меньшей мере, одного расстояния для, по меньшей мере, одной гипотезы для второго символа данных с помощью первого «жесткого» решения.
8. Устройство по п.7, в котором символы данных дополнительно содержат третий символ данных, и в котором, по меньшей мере, один процессор конфигурируют для получения второго «жесткого» решения для второго символа данных, основываясь на втором наборе, по меньшей мере, одного расстояния, и для вычисления третьего набора, по меньшей мере, одного расстояния для, по меньшей мере, одной гипотезы для третьего символа данных с помощью первого и второго «жестких» решений.
9. Способ восстановления символов данных, посылаемых в MIMO-передаче, содержащий этапы, на которых:
выбирают порядок детектирования символов данных, посылаемых в MIMO-передаче, основываясь на, по меньшей мере, одном атрибуте символов данных; причем, по меньшей мере, один атрибут соответствует схемам модуляции или энергетическим запасам линии связи или их комбинации для символов данных; и выполняют сферическое детектирование символов данных в выбранном порядке.
10. Способ по п.9, в котором выполнение сферического детектирования содержит этапы, на которых: разлагают матрицу откликов канала для получения верхней треугольной матрицы для выбранного порядка, вычисляют расстояния для множества гипотез для каждого символа данных, основываясь на верхней треугольной матрице, и определяют гипотезы-кандидаты для символов данных, основываясь на вычисленных расстояниях.
11. Способ по п.9, в котором выполнение сферического детектирования содержит этапы, на которых: получают, по меньшей мере, одно «жесткое» решение для, по меньшей мере, одного символа данных и определяют гипотезы-кандидаты для символов данных с помощью, по меньшей мере, одного «жесткого» решения.
12. Способ по п.9, дополнительно содержащий этапы, на которых:
идентифицируют, по меньшей мере, один гипотетический символ для каждого символа данных и определяют гипотезы-кандидаты для символов данных, основываясь на, по меньшей мере, одном гипотетическом символе для каждого символа данных.
13. Устройство для восстановления символов данных, посылаемых в MIMO-передаче, содержащее средство выбора порядка детектирования символов данных, посылаемых в MIMO-передаче, основываясь на, по меньшей мере, одном атрибуте символов данных; причем по меньшей мере, один атрибут соответствует схемам модуляции или энергетическим запасам линии связи или их комбинации для символов данных; и
средство выполнения сферического детектирования для символов данных в выбранном порядке.
14. Устройство по п.13, в котором, по меньшей мере, один атрибут дополнительно содержит вероятности ошибки.
15. Устройство по п.13, в котором средство выполнения сферического детектирования содержит: средство разложения матрицы откликов канала для получения верхней треугольной матрицы для выбранного порядка,
средство вычисления расстояний для множества гипотез для каждого символа данных, основываясь на верхней треугольной матрице, и
средство определения гипотез-кандидатов для символов данных, основываясь на вычисленных расстояниях.
16. Устройство по п.13, в котором средство выполнения сферического детектирования содержит:
средство получения, по меньшей мере, одного «жесткого» решения для, по меньшей мере, одного символа данных и средство определения гипотез-кандидатов для символов данных с помощью, по меньшей мере, одного «жесткого» решения.
17. Считываемый процессором носитель для восстановления символов данных, посылаемых в MIMO-передаче, содержащий команды,
сохраненные на нем, которые при считывании со считываемого процессором носителя и при исполнении процессором обеспечивают возможность процессору выполнять: выбор порядка детектирования символов данных, посылаемых в MIMO-передаче, основываясь на, по меньшей мере, одном атрибуте символов данных; причем, по меньшей мере, один атрибут соответствует схемам модуляции или энергетическим запасам линии связи или их комбинации для символов данных; и выполнение сферического детектирования для символов данных в выбранном порядке.
18. Устройство для восстановления символов данных, посылаемых в MIMO-передаче, содержащее: по меньшей мере, один процессор, сконфигурированный для выполнения сферического детектирования символов данных, основываясь на, по меньшей мере, двух схемах модуляции, и для выполнения сферического детектирования для символов данных в определенном порядке, и память, соединенную с, по меньшей мере, одним процессором.
19. Устройство по п.18, в котором, по меньшей мере, один процессор конфигурируют для определения конкретного количества гипотез для оценки для каждого символа данных, основываясь на схеме модуляции, используемой для символа данных.
20. Устройство по п.18, в котором, по меньшей мере, один процессор конфигурируют для идентификации подмножества всех гипотез для каждого символа данных, основываясь на схеме модуляции, используемой для символа данных, и для оценки подмножества гипотез для каждого символа данных.
21. Устройство по п.18, в котором, по меньшей мере, один процессор конфигурируют для сохранения конкретного количества гипотез для каждого символа данных, основываясь на схеме модуляции, используемой для символа данных.
22. Устройство по п.18, в котором, по меньшей мере, один процессор конфигурируют для сохранения конкретного количества гипотез для каждого символа данных, основываясь на энергетическом запасе линии связи для символа данных.
23. Способ для восстановления символов данных, посылаемых в MIMO-передаче, содержащий этапы, на которых: получают принятые символы для MIMO-передачи, определяют порядок детектирования символов данных, основываясь на, по меньшей мере, двух схемах модуляции, и выполняют сферическое детектирование для символов данных в определенном порядке.
24. Устройство восстановления символов данных, посылаемых в MIMO-передаче, содержащее: средство получения принятых символов для MIMO-передачи и средство для определения порядка детектирования символов данных, основываясь на, по меньшей мере, двух схемах модуляции, и средство для выполнения сферического детектирования для символов данных в определенном порядке.
25. Устройство по п.24, дополнительно содержащее:
средство определения конкретного количества гипотез для оценки для каждого символа данных, основываясь на схеме модуляции, используемой для данного символа данных.
26. Считываемый процессором носитель для восстановления символов данных, посылаемых в MIMO-передаче, содержащий команды, сохраненные на нем, которые при считывании со считываемого процессором носителя и исполнения процессором обеспечивают возможность процессору выполнять получение принятых символов для MIMO-передачи и определение порядка детектирования символов данных, основываясь на, по меньшей мере, двух схемах модуляции, и выполнение сферического детектирования для символов данных в определенном порядке.
27. Устройство для восстановления символов данных, передаваемых в MIMO-передаче, содержащее, по меньшей мере, один процессор, сконфигурированный для выполнения сферического детектирования для множества потоков данных, для получения информации о состоянии канала для множества потоков данных и для выбора скоростей для множества потоков данных, основываясь на информации о состоянии канала; и память, соединенную с, по меньшей мере, одним процессором.
28. Устройство по п.27, в котором информация о состоянии канала содержит матрицу откликов канала, и в котором, по меньшей мере, один процессор конфигурируют для разложения матрицы откликов канала для получения верхней треугольной матрицы, используемой для сферического детектирования, для оценки качеств сигналов множества потоков данных, основываясь на верхней треугольной матрице, и для выбора скоростей для множества потоков данных, основываясь на качествах сигналов.
29. Устройство по п.28, в котором, по меньшей мере, один процессор конфигурируют для выполнения сферического детектирования для множества потоков данных в последовательном порядке, один поток данных за один раз, и для оценки качества сигнала каждого потока данных, предполагая, что подавляют помехи от уже обнаруженных потоков данных.
30. Устройство по п.27, в котором, по меньшей мере, один процессор конфигурируют для оценки качеств сигналов множества потоков данных, основываясь на информации о состоянии канала и с помощью последовательного подавления помех.
31. Устройство по п.27, в котором, по меньшей мере, один процессор конфигурируют для выполнения сферического детектирования для множества потоков данных в последовательном порядке, начиная с первого потока данных, и для выбора скорости для первого потока данных для достижения целевой частоты появления ошибок символа, или лучше, для первого потока данных.
32. Устройство по п.27, в котором, по меньшей мере, один процессор конфигурируют для выполнения сферического детектирования для множества потоков данных в последовательном порядке, начиная с первого потока данных, для оценки качества сигнала первого потока данных, основываясь на информации о состоянии канала, для выбора начальной скорости для первого потока данных, основываясь на качестве сигнала первого потока данных, и для выбора скорректированной с помощью схемы модуляции более низкого порядка скорости первого потока данных, если начальная скорость приводит к тому, что первый поток данных превышает целевую частоту появления ошибок символа.
33. Устройство по п.27, в котором, по меньшей мере, один процессор конфигурируют для оценки качества сигнала каждого из множества потоков данных, основываясь на информации о состоянии канала, и для выбора скорости независимо для каждого потока данных, основываясь на качестве сигнала потока данных.
34. Устройство по п.27, в котором, по меньшей мере, один процессор конфигурируют для выбора скоростей для множества потоков данных из набора комбинаций скорости.
35. Устройство по п.27, в котором, по меньшей мере, один процессор конфигурируют для того, чтобы побудить передавать в передатчик указание относительно скоростей для множества потоков данных.
36. Способ восстановления символов данных, посылаемых в MIMO-передаче, содержащий этапы, на которых:
выполняют сферическое детектирование для множества потоков данных;
получают информацию о состоянии канала для множества потоков данных и выбирают скорости для множества потоков данных, основываясь на информации о состоянии канала.
37. Способ по п.36, в котором выполнение сферического детектирования для множества потоков данных содержит выполнение сферического детектирования для множества потоков данных в последовательном порядке, один поток данных за один раз, и в котором выбор скоростей для множества потоков данных содержит оценку качества сигнала каждого потока данных, основываясь на информации о состоянии канала и предполагая, что подавляют помехи от уже обнаруженных потоков данных.
38. Способ по п.36, в котором выполнение сферического детектирования для множества потоков данных содержит выполнение сферического детектирования для множества потоков данных в последовательном порядке, начиная с первого потока данных, и в котором выбор скоростей для множества потоков данных содержит выбор скорости для первого потока данных для достижения целевой частоты появления ошибок символа, или лучше, для первого потока данных.
39. Устройство для восстановления символов данных, посылаемых в MIMO-передаче, содержащее: средство выполнения сферического детектирования для множества потоков данных, средство получения информации о состоянии канала для множества потоков данных и средство выбора скоростей для множества потоков данных, основываясь на информации о состоянии канала.
40. Устройство по п.39, в котором средство выполнения сферического детектирования для множества потоков данных содержит средство выполнения сферического детектирования для множества потоков данных в последовательном порядке, один поток данных за один раз, и в котором средство выбора скоростей для множества потоков данных содержит средство оценки качества сигнала каждого потока данных, основываясь на информации о состоянии канала и предполагая, что подавляют помехи от уже обнаруженных потоков данных.
41. Устройство по п.39, в котором средство выполнения сферического детектирования для множества потоков данных содержит средство выполнения сферического детектирования для множества потоков данных в последовательном порядке, начиная с первого потока данных, и в котором средство выбора скоростей для множества потоков данных содержит средство выбора скорости для первого потока данных для достижения целевой частоты появления ошибок символа, или лучше, для первого потока данных.
42. Считываемый процессором носитель для восстановления символов данных, посылаемых в MIMO-передаче, содержащий команды, сохраненные на нем, которые при считывании со считываемого процессором носителя и исполнения процессором, обеспечивают возможность процессору выполнять сферическое детектирование для множества потоков данных, получение информации о состоянии канала для множества потоков данных и выбор скоростей для множества потоков данных, основываясь на информации о состоянии канала.
| Способ А.П.Озерова усиления пчелосемей | 1986 |
|
SU1521414A1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ПОДДЕРЖАНИЯ АВТОМАТИЧЕСКОГО ЗАПРОСА ПОВТОРЕНИЯ В ВЫСОКОСКОРОСТНОЙ БЕСПРОВОДНОЙ СИСТЕМЕ ПЕРЕДАЧИ ПАКЕТНЫХ ДАННЫХ | 2003 |
|
RU2267225C2 |
| RU 2003136164 A, 27.05.2005 | |||
| WO 03041300 A1, 15.05.2003 | |||
| EP 1376921 A1, 02.01.2004 | |||
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| US 20050175122 A1, 11.08.2005 | |||
| Устройство для заполнения замкнутых емкостей жидкостью | 1988 |
|
SU1545082A1 |

