Настоящая заявка на патент испрашивает приоритет по предварительной заявке № 60/794,615, озаглавленной «REDUCED COMPLEXITY STEERED MIMO OFDM SYSTEMS», поданной 24 апреля 2006 года и переуступленной правопреемнику настоящей заявки, и таким образом, явным образом включенной в настоящий документ посредством ссылки.
Область техники
Настоящее раскрытие в целом относится к связи, а более точно, к технологиям для передачи данных в системе с множеством входов и множеством выходов (MIMO).
Уровень техники
В системе беспроводной связи передатчик может использовать множество (T) передающих антенн для передачи данных на приемник, оборудованный множеством (R) приемных антенн. Множество передающих и приемных антенн формируют канал MIMO, который может использоваться для повышения пропускной способности и/или улучшения надежности. Например, передатчик может одновременно передавать вплоть до T потоков данных с T передающих антенн для улучшения пропускной способности. В качестве альтернативы передатчик может передавать одиночный поток данных со всех T передающих антенн для улучшения приема приемником.
Хорошие эксплуатационные показатели (например, пропускная способность) могут достигаться передачей данных на собственных модах канала MIMO. Собственные моды могут рассматриваться в качестве ортогональных пространственных каналов. Для передачи данных на собственных модах передатчик получает матрицу управления передачей, которая выводится на основании матрицы отклика канала MIMO, и выполняет пространственную обработку с помощью матрицы управления передачей.
Система может иметь в распоряжении множество поднесущих, которые могут использоваться для передачи данных. Для передачи данных на собственных модах каждой из поднесущих передатчик может получать матрицу управления передачей для каждой поднесущей и выполнять пространственную обработку для такой поднесущей с помощью матрицы управления передачей. Однако вывод матрицы управления передачей для каждой поднесущей может требовать значительных вычислительных ресурсов в передатчике и/или приемнике. Более того, значительный объем ресурсов радиосвязи может понадобиться для отсылки матриц управления передачей или пилот-сигналов, используемых для вывода матриц управления передачей с приемника на передатчик.
Поэтому в данной области техники есть потребность в технологиях для передачи данных с меньшим количеством вычислений и служебных сигналов или данных обратной связи.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В материалах настоящей заявки описаны технологии для передачи данных с использованием канальной информации для подмножества всех поднесущих, используемых для передачи данных. Технологии могут обеспечивать хорошие эксплуатационные показатели наряду с сокращением вычислений и служебных сигналов или данных обратной связи.
В варианте осуществления станция передатчика принимает канальную информацию для по меньшей мере одной поднесущей, которая является подмножеством множества поднесущих, используемых для передачи данных. Канальная информация может содержать по меньшей мере одну матрицу управления передачей, по меньшей мере один набор собственных векторов, по меньшей мере одну матрицу отклика канала или по меньшей мере одну ковариационную матрицу канала для по меньшей мере одной поднесущей. Канальная информация также может содержать неуправляемый пилот-сигнал или управляемый пилот-сигнал, переданный по меньшей мере на одной поднесущей. В любом случае станция передатчика получает по меньшей мере одну матрицу управления передачей для по меньшей мере одной поднесущей из канальной информации. Станция передатчика определяет матрицу управления передачей для каждой из множества поднесущих, которая может (1) устанавливаться равной матрице управления передачей для ближайшей одной из по меньшей мере одной поднесущей или (2) выводиться посредством интерполяции двух или более матриц управления передачей для двух или более ближайших поднесущих. Станция передатчика выполняет управление передачей или управление диаграммой направленности для каждой из множества поднесущих с помощью матрицы управления передачей для такой поднесущей.
В варианте осуществления станция приемника передает канальную информацию для по меньшей мере одной поднесущей на станцию передатчика и принимает передачу данных, переданную на множестве поднесущих. Станция приемника может получать по меньшей мере одну матрицу отклика канала для по меньшей мере одной поднесущей и выполнять разложение по меньшей мере одной матрицы отклика канала для получения по меньшей мере одной матрицы управления передачей, например, V (k) и/или U (k), которые описаны ниже. Приемник может передать по меньшей мере одну матрицу V (k) управления передачей в качестве явной обратной связи. Станция приемника также может передать управляемый пилот-сигнал на по меньшей мере одной поднесущей с использованием по меньшей мере одной матрицы U (k) управления передачей. Управляемый пилот-сигнал является одной из разновидностей неявной обратной связи. Станция приемника определяет матрицы управления передачей для множества поднесущих на основании по меньшей мере одной матрицы управления передачей таким же образом, как станция передатчика. Станция приемника выводит матрицы пространственных фильтров для множества поднесущих на основании матриц отклика канала и матриц управления передачей для этих поднесущих. Станция приемника затем выполняет обнаружение с помощью матриц пространственных фильтров.
Различные аспекты и варианты осуществления раскрытия ниже описаны более подробно.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Аспекты и варианты осуществления раскрытия станут более очевидными из подробного описания, изложенного ниже, когда воспринимается в соединении с чертежами, на всем протяжении которых одинаковые символы ссылок соответственно совпадают.
Фиг.1 показывает структурную схему станции передатчика и станции приемника.
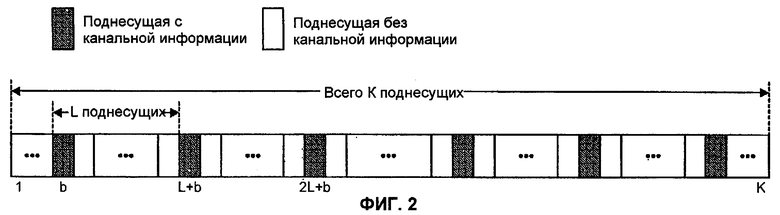
Фиг.2 показывает обратную связь канальной информации на фиксированных поднесущих.
Фиг.3 показывает обратную связь канальной информации на меняющихся поднесущих.
Фиг.4 показывает обратную связь канальной информации в IEEE 802.11.
Фиг.5 показывает структурную схему пространственного процессора передачи (TX).
Фиг.6 показывает структурную схему пространственного процессора приема (RX).
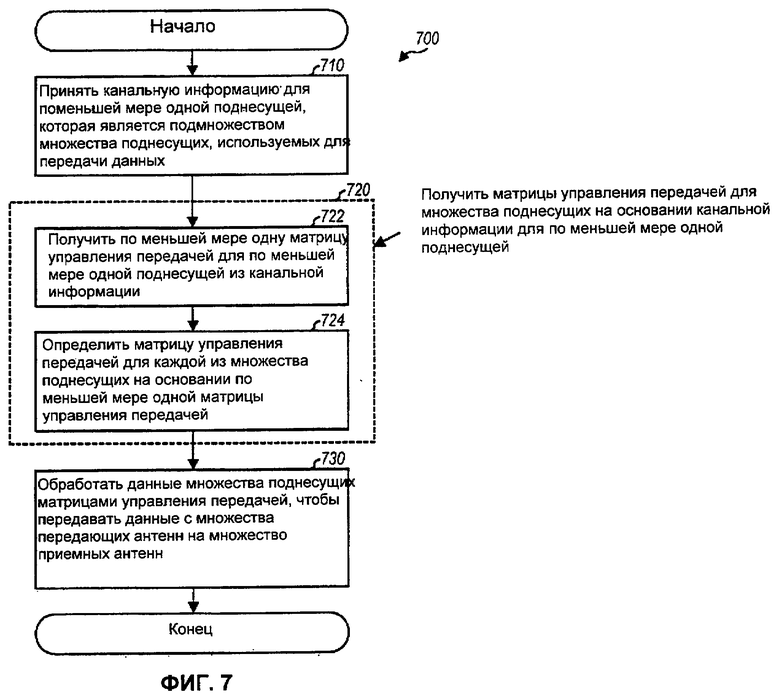
Фиг.7 показывает последовательность операций для передачи данных.
Фиг.8 показывает устройство для передачи данных.
Фиг.9 показывает последовательность операций для приема данных.
Фиг.10 показывает устройство для приема данных.
ПОДРОБНОЕ ОПИСАНИЕ
Слово «примерный» используется в материалах настоящей заявки, чтобы означать «служащий в качестве примера, отдельного случая или иллюстрации». Любой вариант осуществления или конструкция, описанные в материалах настоящей заявки как «примерные», не обязательно должны истолковываться в качестве предпочтительных или преимущественных над другими вариантами осуществления или конструкциями.
Технологии передачи, описанные в материалах настоящей заявки, могут использоваться для различных сетей беспроводной связи, таких как беспроводные глобальные сети (WWAN), беспроводные региональные сети (WMAN), беспроводные локальные сети (WLAN) и так далее. Термины «сеть» и «система» часто используются взаимозаменяемо. Технологии также могут использоваться для различных схем множественного доступа, таких как множественный доступ с частотным разделением (FDMA), множественный доступ с кодовым разделением (CDMA), множественный доступ с временным разделением (TDMA), множественный доступ с пространственным разделением (SDMA), FDMA с ортогональным разделением (OFDMA), FDMA на одиночной несущей (SC-FDMA) и так далее. Сеть OFDMA использует мультиплексирование с ортогональным частотным разделением (OFDM). Сеть SC-FDMA использует мультиплексирование с частотным разделением на одиночной несущей (SC-FDM). OFDM и SC-FDM делит ширину полосы пропускания системы на множество (K) ортогональных поднесущих, которые также называются тонами, элементами дискретизации и так далее. Каждая поднесущая может модулироваться данными. Вообще, символы модуляции передаются в частотной области с помощью OFDM и во временной области с помощью SC-FDM. Для ясности технологии передачи описаны ниже для основанной на OFDM сети, которая может быть сетью OFDMA, WLAN, которая реализует IEEE 802.11a, 802.11g и/или 802.11n, либо некоторой другой сетью.
Фиг.1 показывает структурную схему варианта осуществления двух станций 110 и 150 в сети 100 беспроводной связи. Для передачи по нисходящей линии связи (или прямой линии связи) станция 110 может быть частью и может содержать в себе некоторые или все из функциональных возможностей точки доступа, базовой станции, Узла В и/или некоторого другого сетевого объекта. Станция 150 может быть частью и может содержать в себе некоторые или все из функциональных возможностей терминала, мобильной станции, пользовательского оборудования, абонентского блока и/или некоторого другого устройства. Для передачи по восходящей линии связи (или обратной линии связи) станция 110 может быть частью терминала, мобильной станции, пользовательского оборудования и так далее, а станция 150 может быть частью точки доступа, базовой станции, Узла В и так далее. Станция 110 является передатчиком передачи данных и оборудована множеством (T) антенн. Станция 150 является приемником передачи данных и оборудована множеством (R) антенн. Каждая передающая антенна и каждая приемная антенна может быть физической антенной или антенной решеткой.
На станции 110 передатчика процессор 120 данных передачи (TX) принимает данные трафика из источника 112 данных, обрабатывает (например, форматирует, кодирует, перемежает и посимвольно отображает) данные трафика в соответствии с одной или более скоростями и формирует символы данных. В качестве используемых в материалах настоящей заявки символов данных является символ для данных, пилотным символом является символ для пилот-сигнала, и символ типично является комплексным значением. Символы данных и пилотные символы могут быть символами модуляции из схемы модуляции, такой как PSK (фазовая манипуляция) или QAM (квадратурная амплитудная модуляция). Пилот-сигналом являются данные, которые априори известны как передатчику, так и приемнику. Скорость может указывать скорость данных или скорость битов информации, схемы кодирования или кодовой скорости, схемы модуляции, размера пакета и/или других параметров. Скорость передачи также может упоминаться как формат пакета, транспортный формат или некоторой другой терминологией. Процессор 120 данных TX демультиплексирует символы данных в M потоков, где 1≤M≤T. Потоки символов данных также могут упоминаться как потоки данных, пространственные потоки выходные потоки, или некоторой другой терминологией.
Пространственный процессор 130 TX мультиплексирует символы данных с пилотными символами, выполняет управление передачей над символами данных и/или пилотными символами, как описано ниже, и выдает T выходных потоков символов в T передатчиков со 132a по 132t (TMTR). Каждый передатчик 132 обрабатывает (например, осуществляет OFDM-модуляцию, преобразует в аналоговую форму, фильтрует, усиливает и преобразует с повышением частоты) свой выходной поток символов и формирует модулированный сигнал. T модулированных сигналов из передатчиков со 132a по 132t передаются с антенн со 134a по 134t соответственно.
На станции 150 приемника R антенн со 152a по 752r принимают T модулированных сигналов от станции 110 передатчика, и каждая антенна 152 выдает принятый сигнал в соответственный приемник 154 (RCVR). Каждый приемник 154 обрабатывает (например, фильтрует, усиливает, преобразует с понижением частоты, оцифровывает и осуществляет OFDM-демодуляцию) свои принятые сигналы, выдает принятые символы данных в пространственный процессор 160 приема (RX) и выдает принятые пилотные символы в канальный процессор 194. Канальный процессор 194 оценивает отклик канала MIMO на основании принятых пилотных символов и выдает оценки канала в пространственный процессор 160 RX. Пространственный процессор 160 RX выполняет MIMO-обнаружение над принятыми символами данных с помощью оценок канала и выдает оценки символов данных. Процессор 170 данных RX дополнительно обрабатывает (например, обращенно перемежает и декодирует) оценки символов данных и выдает декодированные данные в приемник 172 данных.
Станция 150 приемника может передавать информацию обратной связи на базовую станцию 110. Информация обратной связи может содержать одну или более скоростей для использования в течение передачи, матрицы управления передачей, индикаторы качества канала (CQI) и/или другую информацию. Информация обратной связи обрабатывается сигнальным процессором 180 TX, мультиплексируется с пилотными символами и пространственно обрабатывается пространственным процессором 182 TX и дополнительно обрабатывается передатчиками со 154a по 154r, чтобы формировать R модулированных сигналов, которые передаются через антенны со 152a по 152r.
На станции 110 передатчика модулированные сигналы от станции 150 приемника принимаются T антеннами со 134a по 134t, обрабатываются приемниками со 132a по 132t, пространственно обрабатываются пространственным процессором 136 RX и дополнительно обрабатываются сигнальным процессором 138 RX, чтобы восстанавливать информацию обратной связи, отправляемую станцией 150. Контроллер/процессор 140 управляет передачей данных на станцию 150 приемника на основании информации обратной связи. Канальный процессор 144 может оценивать отклик канала на основании принятых пилотных символов и выдает оценки канала, которые могут использоваться для управления передачей.
Контроллеры/процессоры 140 и 190 управляют работой на станциях 110 и 150 соответственно. Память 142 и 192 хранит данные и управляющие программы для станций 110 и 150 соответственно.
Канал MIMO, сформированный T антеннами на станции 110 передатчика и R антеннами на станции 150 приемника, может характеризоваться матрицей H (k) отклика канала R×T для каждой поднесущей k, которая может быть выражена как

где компонента h i,j(k), для i=1, ..., R и j=1, ..., T, является связью или комплексным коэффициентом усиления между передающей антенной j и приемной антенной i для поднесущей k. Станция 150 приемника может оценивать H (k) на основании пилот-сигнала, передаваемого системой 110 передатчика. Для простоты описание в материалах настоящей заявки предполагает отсутствие ошибок в оценивании канала.
В определенных аспектах для обеспечения направленной передачи матрица H (k) отклика канала для каждой поднесущей k может быть приведена к диагональному виду с помощью разложения по собственным значениям либо разложения по сингулярным числам для получения S собственных мод H (k), где S ≤ min {T, R}. Собственные моды могут рассматриваться в качестве ортогональных пространственных каналов. Разложение по сингулярным числам H (k) может быть выражено как
H (k)= U (k)·Σ(k)· V H(k), (2)
где U (k) - унитарная матрица R×R левых сингулярных векторов H (k),
Σ(k) - диагональная матрица R×T сингулярных чисел H (k),
V (k) - унитарная матрица T×T правых сингулярных векторов H (k), и
«H» обозначает сопряженную транспозицию матрицы.
Унитарная матрица V характеризуется свойством V H· V = I , где I - единичная матрица. Столбцы V ортогональны друг другу, и каждый столбец имеет единичную мощность. Диагональные элементы Σ(k) являются сингулярными числами, которые представляют коэффициенты усиления канала по собственным модам H (k).
Разложение по собственным значениям H (k) может быть выражено как
R (k)= H H(k)· H (k)= V (k)·Λ(k)· V H(k), (3)
где R (k) - ковариационная матрица канала T×T
Λ(k) - диагональная матрица собственных значений R (k) T×T, и
V (k) - унитарная матрица собственных векторов R (k) T×T.
Диагональные элементы Λ(k) являются собственными значениями, которые представляют коэффициенты усиления по мощности собственных мод H (k). Собственные значения в Λ(k) являются квадратами сингулярных чисел в Σ(k).
Как показано в равенствах (2) и (3), столбцы V (k) являются правыми сингулярными векторами H (k), а также собственными векторами R (k). V (k) может упоминаться как матрица управления передачей, матрица формирования диаграммы направленности, собственная матрица управления, матрица управления и так далее. Разложение по сингулярным числам в равенстве (2) и разложение по собственным значениям в равенстве (3) может выполняться с использованием различных технологий, таких как с помощью сдвига Якоби, описанного в переуступленной заявке на выдачу патента США № 10/096,839, озаглавленной «Efficient Computation for Eigenvalue Decomposition and Singular Value Decomposition of Matrices», поданной 31 марта 2005 года.
Станция 110 передатчика может выполнять управление передачей с помощью V (k) для передачи символов данных на собственных модах H (k) следующим образом:
x (k)= V (k)· s (k), (4)
где s (k) - вектор T×1 с вплоть до S символов данных, которые должны передаваться на поднесущей k, и
x (k) - вектор T×1 с T выходными символами для T антенн на поднесущей k.
Управление передачей с помощью правых сингулярных векторов в равенстве (4) также упоминается как управление диаграммой направленности, собственное управление, формирование диаграммы направленности, собственное формирование диаграммы направленности и так далее. Управление передачей в равенстве (4) максимизирует емкость системы.
Несмотря на то что вышеприведенное обсуждение относится к использованию разложения по собственным значениям или разложению по сингулярным числам для определения векторов или матриц управления или формирования диаграммы направленности, другие подходы к определению матриц, векторов или весов направленности могут использоваться с любыми аспектами, обсужденными в материалах настоящей заявки.
Станция 150 приемника может выполнять разложение по сингулярным числам или разложение по собственным значениям независимо для каждой информационной поднесущей и получать набор матриц управления передачей для всех информационных поднесущих. Информационная поднесущая является поднесущей, используемой для передачи данных. Станция 150 приемника затем может передать набор матриц управления передачей на станцию 110 передатчика, которая может выполнять управление передачей для каждой информационной поднесущей с помощью матрицы управления передачей для такой поднесущей.
Система 100 может использовать дуплексную передачу с временным разделением (TDD), которая использует единственный частотный канал как для нисходящей линии связи, так и восходящей линии связи. Поскольку один частотный канал используется для обеих линий связи, отклик канала MIMO для одной линии связи может предполагаться взаимообратным отклику канала MIMO для другой линии связи. То есть, если H (k) является откликом канала MIMO для линии связи от станции 110 передатчика к станции 150 приемника, то взаимообратный канал предполагает, что отклик канала MIMO для линии связи от станции 150 приемника к станции 110 передатчика может быть задан как H T(k), где «T» обозначает транспозицию матрицы. Обратимость канала в системе TDD позволяет оценивать отклик канала для одной линии связи на основании пилот-сигнала, переданного по другой линии связи. Таким образом, станция 150 приемника может передавать пилот-сигнал на станцию 110 передатчика, которая может оценивать отклик канала MIMO на основании пилот-сигнала от станции 150 приемника. Станция 110 передатчика затем может выполнять разложение по сингулярным числам или разложение по собственным значениям для получения набора матриц управления передачей для всех информационных поднесущих.
Вообще, станция 110 передатчика может получать матрицы управления передачей на основании явной и/или неявной обратной связи от станции 150 приемника. Явная обратная связь может содержать матрицы управления передачей, выведенные станцией 150 приемника на основании пилот-сигнала, переданного станцией 110 передатчика. Неявная обратная связь может содержать пилот-сигнал, передаваемый станцией 150 приемника и используемый станцией 110 передатчика для вывода матриц управления передачей. В любом случае, вывод матрицы управления передачей для каждой информационной поднесущей может потребовать значительных вычислительных ресурсов на станции передатчика и/или приемника. Более того, передача явной и/или неявной обратной связи для каждой информационной поднесущей может потребовать значительного количества ресурсов радиосвязи.
Основанная на OFDM система в типовом случае сконструирована так, что широкополосный избирательный по частоте канал связи представляется приемнику как множество узкополосных каналов связи с равномерным затуханием. Разнесение между соседними поднесущими в типовом случае выбирается, чтобы гарантировать, что каждая поднесущая испытывает равномерное затухание. Разнесение связано и определяется ожидаемым максимальным разбросом задержек канала или минимальной частотной когерентностью. В некоторых аспектах некоторая частотная когерентность в типовом случае существует между поднесущими, и соседние поднесущие могут коррелироваться по своим канальным параметрам. Таким образом, в определенных аспектах матрица управления передачей для одной поднесущей может использоваться для управления передачей нескольких близлежащих поднесущих. Значительное сокращение вычислений и служебных сигналов или данных обратной связи может быть реализовано повторным использованием матриц управления передачей.
В варианте осуществления станция 110 приемника передает канальную информацию только для подмножества всех информационных поднесущих. Канальная информация может содержать матрицы V (k) управления передачей, собственные векторы или правые сингулярные векторы, матрицы H (k) отклика канала, ковариационные матрицы R (k) канала, неуправляемый пилот-сигнал, управляемый пилот-сигнал и/или другую имеющую отношение к каналу информацию. Поднесущие, для которых передается канальная информация, упоминаются как назначенные поднесущие.
Фиг.2 показывает вариант осуществления фиксированных назначенных поднесущих. В этом варианте осуществления K совокупных поднесущих предполагаются используемыми для передачи и наделены индексами с 1 по K. Назначенные поднесущие равномерно распределены по K поднесущим и включают в себя каждую L-ую поднесущую или поднесущие b, L+b, 2L+b и так далее, где L>1, а b является индексом первой назначенной поднесущей. Равномерное распределение назначенных поднесущих предусматривает дискретизацию полной полосы пропускания системы в частотной области.
В варианте осуществления L является фиксированным значением, которое выбирается, чтобы обеспечивать хорошие эксплуатационные показатели для большинства рабочих сред. В варианте осуществления L равно трем, что позволяет использовать канальную информацию для назначенной поднесущей для такой назначенной поднесущей, а также информационных поднесущих слева и справа от назначенной поднесущей. В еще одном варианте осуществления L является конфигурируемым значением, которое может быть любым положительным целым значением. Если L=1, то канальная информация передается для каждой информационной поднесущей.
Фиг.3 показывает вариант осуществления изменяющихся назначенных поднесущих. В примере, показанном на фиг.3, L=3, сформированы три набора назначенных поднесущих, и поднесущие в каждом наборе расположены в шахматном порядке относительно поднесущих в других двух наборах. Три набора могут периодически повторяться на протяжении и выбираться в трех временных интервалах, как показано на фиг.3. Вообще, разные наначенные поднесущие могут выбираться в разных временных интервалах, например, на основании предопределенной схемы или псевдослучайной последовательности, которые известны обоим, передатчику и приемнику. Изменение назначенных поднесущих позволяет передавать по обратной связи канальную информацию для разных поднесущих в разных временных интервалах, что может обеспечить разнесение, противодействующее частотно-селективному замиранию.
Фиг.4 показывает вариант осуществления назначенных поднесущих для IEEE 802.11. IEEE 802.11 использует структуру поднесущих с общим количеством K=64 поднесущих, которым назначены индексы с -31 по +32. В IEEE 802.11a/g, 52 поднесущих с индексами от -26 до -1 и с +1 до +26 являются используемыми для передачи, четыре поднесущих с индексами -21, -7, +7 и +21 используются для пилот-сигнала несущей, и поднесущая с индексом 0 не используется для передачи. В IEEE 802.11n, 56 поднесущих с индексами от -28 до -1 и с +1 до +28 являются используемыми для передачи. Фиг.4 и таблица 1 показывают примерные назначенные поднесущие для разных значений L. Также могут выбираться другие назначенные поднесущие.
В варианте осуществления назначенные поднесущие известны априори обеим станциям передатчика и приемника. Этот вариант осуществления избегает необходимости передавать сигнализацию для идентификации назначенных поднесущих. В еще одном варианте осуществления определено множество наборов назначенных поднесущих, и один набор назначенных поднесущих выбран для использования и идентифицируется сигнализацией.
В варианте осуществления L является конфигурируемым и определяется на основании канальных условий. Назначенные поднесущие могут выбираться во время установления соединения, всякий раз, когда обнаруживаются изменения канальных условий и/или в другие моменты времени. В варианте осуществления станция 150 приемника определяет избирательность по частоте беспроводного канала и выбирает L на основании величины избирательности по частоте. Меньшее значение L может использоваться для беспроводного канала с большей избирательностью по частоте, а большее значение L может использоваться для беспроводного канала с меньшей избирательностью по частоте.
Избирательность по частоте может количественно определяться разбросом задержек, который является разностью между временем прихода самого раннего сигнального тракта и временем прихода самого позднего сигнального тракта на стации 150 приемника. Разброс задержек может определяться посредством оценки импульсного отклика канала, определения самой ранней задержки τ min и самой поздней задержки τ max, для которых амплитуда импульсного отклика канала превышает предопределенное пороговое значение, и вывода разброса задержек в качестве τ max-τ min. Разброс задержек также может определяться посредством вывода профиля задержки мощности, который является мощностью импульсного отклика канала, в качестве функции относительной задержки, и установки разброса задержек равным ширине профиля задержки мощности. Разброс задержек и профиль задержки мощности описаны в статье P.A. Bello, озаглавленной «Characterization of Randomly Time-Variant Linear Channels», IEEE, Trans. Communications CS-11, рр. 360-393, Dec. 1963.
Избирательность по частоте также может количественно определяться шириной полосы когерентности, которая имеет отношение к скорости изменения матриц отклика канала в качестве функции частоты. Функция Q(ℓ) частотной корреляции может быть определена в качестве:

где ℓ представляет дельту по частоте, а «*» обозначает комплексное сопряжение.
Ширина полосы когерентности может оцениваться на основании ширины Q(ℓ), как изложено ниже:

где LC является наименьшим значением ℓ, для которого |Q(ℓ)| ≤ β · |Q(0)|,
β - пороговое значение между 0 и 1,
Tsam - продолжительность выборки, и
BWC - ширина полосы когерентности.
Разброс задержек и ширина полосы когерентности также могут определяться другими способами. Вообще, ширина полосы когерентности является обратно зависимой от разброса задержек. Отсюда меньшая ширина полосы когерентности соответствует большему разбросу задержек, и наоборот. L может быть зависимой от ширины полосы когерентности и обратно зависимой от разброса задержек. Функция или справочная таблица могут быть определены для L в зависимости от разброса задержек или ширины полосы когерентности. Подходящее значение L затем может выбираться на основании оцененных разброса задержек или ширины полосы когерентности беспроводного канала.
Станция 150 приемника может передавать различные типы канальной информации на станцию 110 передатчика. В варианте осуществления явной обратной связи станция 150 приемника передает полную матрицу V (k) управления передачей для каждой назначенной поднесущей. В еще одном варианте осуществления явной обратной связи станция 150 приемника передает частичную матрицу управления передачей для каждой назначенной поднесущей. В этих вариантах осуществления станция 150 приемника может выполнять разложение по собственным значениям или разложение по сингулярным числам для каждой назначенной поднесущей вместо каждой информационной поднесущей, что может сокращать вычисления. Более того, станция 150 приемника может выполнять разложение для каждой назначенной поднесущей итерационным образом, например, с использованием циклического сдвига Якоби. Станция 150 приемника может использовать окончательное решение матрицы управления передачей для одной назначенной поднесущей в качестве начального решения матрицы управления передачей для другой назначенной поднесущей, что может уменьшать количество итераций для вывода окончательного решения.
В еще одном другом варианте осуществления явной обратной связи станция 150 приемника упорядочивает сингулярные числа (или собственные значения) для каждой поднесущей от наибольшего к наименьшему и также упорядочивает правые сингулярные векторы для такой поднесущей таким же образом, так что каждый правый сингулярный вектор ассоциирован с одним и тем же сингулярным числом до и после упорядочения. Упорядоченные правые сингулярные векторы могут обозначаться как v 1(k), v 2(k), ..., v T(k). Упорядоченные сингулярные числа могут обозначаться как σ 1(k)≥σ 2(k)≥...≥σ T(k). Широкополосная собственная мода является набором собственных мод с прежним порядком для вех поднесущих после упорядочения, например, широкополосная собственная мода m включает в себя собственную моду m всех поднесущих. Станция 150 приемника может выполнять предсказание ранга и оценивать информационные эксплуатационные показатели (например, общую пропускную способность) для разных количеств широкополосных собственных мод, например, наилучшей широкополосной собственной моды, двух наилучших широкополосных собственных мод и так далее, и min{T, R} широкополосных собственных мод. Количество широкополосных собственных мод с наилучшими эксплуатационными показателями обозначено как M и упоминается как предсказанный ранг канала MIMO, где 1≤M≤min{T, R}. Станция 150 приемника в таком случае может передавать первые M собственных векторов, соответствующих M наилучшим широкополосным собственным модам, для каждой назначенной поднесущей.
В еще одном варианте осуществления явной обратной связи станция 150 приемника передает нормализованный правый сингулярный вектор  (k) для каждой назначенной поднесущей для основной широкополосной собственной моды, которой является широкополосная собственная мода с наибольшими сингулярными числами. Элементы
(k) для каждой назначенной поднесущей для основной широкополосной собственной моды, которой является широкополосная собственная мода с наибольшими сингулярными числами. Элементы  (k) имеют единичную величину, но такую же фазу, как элементы
v
1(k).(k) предоставляет полной мощности передачи, имеющейся в распоряжении для каждой антенны, использоваться для передачи данных. В еще одном другом варианте осуществления явной обратной связи станция 150 приемника передает матрицу
H
(k) отклика канала для каждой назначенной поднесущей. В еще одном другом варианте осуществления станция 150 приемника передает ковариационную матрицу
R
(k) канала для каждой назначенной поднесущей.
(k) имеют единичную величину, но такую же фазу, как элементы
v
1(k).(k) предоставляет полной мощности передачи, имеющейся в распоряжении для каждой антенны, использоваться для передачи данных. В еще одном другом варианте осуществления явной обратной связи станция 150 приемника передает матрицу
H
(k) отклика канала для каждой назначенной поднесущей. В еще одном другом варианте осуществления станция 150 приемника передает ковариационную матрицу
R
(k) канала для каждой назначенной поднесущей.
В варианте осуществления, который применим для явной обратной связи, станция 150 приемника передает полные/укомплектованные значения для каждой матрицы, сообщаемой на станцию 110 передатчика. (Вектор может рассматриваться в качестве вырожденной матрицы, содержащей в себе один столбец.) В еще одном варианте осуществления станция 150 приемника передает полные значения для некоторых сообщаемых матриц и дифференциальные/разностные значения для оставшихся сообщаемых матриц. Например, станция 150 приемника может вычислять дифференциальные значения для матрицы H (k i) отклика канала в качестве ∆ H (k i)= H (k i)- H (k 0) и может отсылать назад H (k 0) и ∆ H (k i), где k i для i=0, 1, ..., являются назначенными поднесущими. В еще одном другом варианте осуществления станция 150 приемника отображает вычисленную матрицу в ближайшую матрицу в таблице кодирования и передает ближайшую матрицу. Например, таблица кодирования возможных матриц может быть определена для V (k), и одна матрица может выбираться из таблицы кодирования для каждой назначенной поднесущей на основании матрицы, вычисленной для такой поднесущей. В еще одном другом варианте осуществления станция 150 приемника выполняет кодирование или сжатие матриц, которые должны сообщаться, для того чтобы сократить объем информации для передачи.
В варианте осуществления неявной обратной связи станция 150 приемника передает неуправляемый пилот-сигнал на каждой назначенной поднесущей. Неуправляемый пилот-сигнал является пилот-сигналом, передаваемым без управления передачей. Станция 150 приемника может передавать неуправляемый пилот-сигнал через R антенн, (1) применяя разные ортогональные коды к передачам пилот-сигнала, передаваемым с R антенн, или (2) передавая передачи пилот-сигнала с R антенн в разных временных интервалах. Станция 110 передатчика может выводить матрицу отклика канала для каждой назначенной поднесущей на основании неуправляемого пилот-сигнала, принятого на поднесущей. Станция 110 передатчика может выполнить разложение матрицы отклика канала для каждой назначенной поднесущей для получения матрицы управления передачей для такой поднесущей.
В еще одном варианте осуществления неявной обратной связи станция 150 приемника передает управляемый пилот-сигнал на каждой назначенной поднесущей. Управляемый пилот-сигнал является пилот-сигналом, передаваемым с управлением передачей. Станция 150 приемника может выполнять разложение по сингулярным числам H (k), как показано в равенстве (2), и получать U (k). В качестве альтернативы станция 150 приемника может выполнять разложение по собственным значениям H (k) · H H(k) вместо H H(k) · H (k), как показано в равенстве (3), для получения U (k). Станция 150 приемника может передавать управляемый пилот-сигнал на каждой собственной моде m, как изложено ниже:

где p(k) - пилотный символ, передаваемый на поднесущей k,
u m(k) - левый сингулярный вектор R×1 для собственных мод m поднесущей k, и
x m(k) - вектор R×1 выходных символов для R антенн на поднесущей k.
В варианте осуществления станция 150 приемника может циклически проходить через S собственных мод в разных периодах символа. В еще одном варианте осуществления станция 150 приемника может передавать управляемые пилот-сигналы на S собственных модах на разных поднесущих, например, использует поднесущие a, a+S, ... для собственной моды 1, использует поднесущие a+1, a+S+1, ... для собственной моды 2 и так далее, и использует поднесущие a+S-1, a+2S-1, ... для собственной моды S.
Принятый управляемый пилот-сигнал на станции 110 передатчика может быть выражен как:

где H T(k)= V *(k)·Σ(k)· U T(k) - разложение по сингулярным числам беспроводного канала от станции 150 приемника на станцию 110 передатчика,
σ m(k) - сингулярное число для собственной моды m поднесущей k, и
n tx(k) - вектор шума для поднесущей k на станции 110 передатчика.
Равенство (8) предполагает обратимость канала в системе TDD, так что H T(k) является откликом канала MIMO от станции 150 приемника к станции 110 передатчика. Равенство (8) указывает, что станция 110 передатчика может оценивать как V (k), так и Σ(k) для каждой назначенной поднесущей на основании управляемого пилот-сигнала, переданного станцией 150 приемника без необходимости оценивать отклик канала MIMO или выполнять разложение.
Станция 110 передатчика получает матрицу управления передачей для каждой назначенной поднесущей на основании канальной информации, принятой от станции 150 приемника. Станция 110 передатчика передает данные на информационных поднесущих с помощью матриц управления передачей, полученных для назначенных поднесущих.
В варианте осуществления станция 110 передатчика выполняет управление передачей для каждой информационной поднесущей с помощью матрицы управления передачей для ближайшей назначенной поднесущей. В качестве примера, для L=3 в таблице 1 матрица управления передачей для назначенной поднесущей 2 может использоваться для каждой из информационных поднесущих 1, 2 и 3, матрица управления передачей для назначенной поднесущей 5 может использоваться для каждой из поднесущих 4, 5 и 6 и так далее. Для L=5 в таблице 1 матрица управления передачей для назначенной поднесущей 3 может использоваться для каждой из информационных поднесущих с 1 по 5, матрица управления передачей для назначенной поднесущей 8 может использоваться для каждой из поднесущих 6, 8, 9 и 10 и так далее.
В еще одном варианте осуществления станция 110 передачи интерполирует матрицы управления передачей для назначенных поднесущих для получения матрицы управления передачей для каждой информационной поднесущей. Например, станция 110 передатчика может выполнять линейную интерполяцию над двумя матрицами управления передачей для двух назначенных поднесущих, чтобы получать L-1 интерполированных матриц управления передачей для L-1 поднесущих между этими двумя назначенными поднесущими. Станция 110 передатчика может выполнять интерполяцию другими способами и/или над более чем двумя матрицами управления передачей для более чем двух назначенных поднесущих.
Станция 110 передатчика может выполнять управление передачей для каждой поднесущей, как изложено ниже:

где  (k) - матрица управления передачей для информационной поднесущей k.
(k) - матрица управления передачей для информационной поднесущей k. (k) может быть матрицей управления передачей для назначенной поднесущей, ближайшей к информационной поднесущей k, или интерполированной матрицей управления передачей, вычисленной для информационной поднесущей k.
(k) может быть матрицей управления передачей для назначенной поднесущей, ближайшей к информационной поднесущей k, или интерполированной матрицей управления передачей, вычисленной для информационной поднесущей k.
Принятые символы на станции 150 приемника могут быть выражены в качестве:

где
H
eff(k)=
H
(k) ·  (k) - действующая матрица отклика канала для поднесущей k, и
(k) - действующая матрица отклика канала для поднесущей k, и
n rx(k) - вектор шума для поднесущей k на станции 150 приемника.
Для простоты шум может предполагаться аддитивным белым гауссовым шумом (AWGN) с нулевым вектором средних значений и ковариационной матрицей
n
rx(k)=
 ·
I
, где
·
I
, где  - дисперсия шума.
- дисперсия шума.
Станция 150 приемника может получать H eff(k) различными способами. В одном из вариантов осуществления станция 110 передатчика передает неуправляемый пилот-сигнал на всех или подмножестве информационных поднесущих. Станция 150 приемника получает матрицу H (k) отклика канала для каждой поднесущей, на которой передан неуправляемый пилот-сигнал, и выполняет разложение матрицы отклика канала для каждой назначенной поднесущей для получения матрицы V (k) управления передачей для такой поднесущей. Станция 150 приемника затем передает матрицы управления передачей (или управляемый пилот-сигнал) для назначенных поднесущих на станцию 110 передатчика. Станция 150 приемника также использует эти матрицы управления передачей для вывода действующих матриц отклика канала для информационных поднесущих.
В еще одном варианте осуществления станция 150 приемника передает неуправляемый пилот-сигнал на назначенных поднесущих. Станция 110 передатчика получает матрицу H T(k) отклика канала для каждой назначенной поднесущей и выполняет разложение H T(k) для получения матрицы V (k) управления передачей. Станция 110 передатчика может передавать неуправляемый или управляемый пилот-сигнал на назначенных поднесущих, на всех информационных поднесущих или подмножестве информационных поднесущих для предоставления станции 150 приемника возможности получать действующие матрицы отклика канала. Вообще, любая из двух станций или обе станции могут передавать пилот-сигнал, любая из двух станций или обе станции могут выполнять разложение, а станция 150 приемника может получать действующие матрицы отклика канала различными способами.
Станция 150 приемника может использовать различные технологии MIMO-обнаружения для восстановления символов данных, переданных станцией 110 передатчика. Эти технологии MIMO-обнаружения включают в себя технологии минимальной среднеквадратической ошибки (MMSE), форсирования нуля (ZF), объединения с максимальным отношением (MRC), декодирования с максимальным правдоподобием (ML), списковое сферическое декодирования (LSD), коррекции с решающей обратной связью (DFE) и последовательного подавления помех (SIC). Станция 150 приемника может выводить матрицу пространственного фильтра для каждой информационной поднесущей k на основании технологии MMSE, как изложено ниже:

где
D
(k)=[diag{[ (k)·
(k)· (k)+·
I
]-1·
(k)+·
I
]-1· (k)·
(k)· (k)}]-1 - диагональная матрица значений масштабирования, используемых для получения нормализованных оценок символов данных.
(k)}]-1 - диагональная матрица значений масштабирования, используемых для получения нормализованных оценок символов данных.
Станция 150 приемника может выполнять MIMO-обнаружение, как изложено ниже:

где  (k) - вектор T×1 оценок символов данных для информационной поднесущей k, и
(k) - вектор T×1 оценок символов данных для информационной поднесущей k, и
 (k) вектор шума после MIMO-обнаружения.
(k) вектор шума после MIMO-обнаружения.
Оценки символов данных в (k) являются оценками символов данных в
s
(k).
Фиг.5 показывает структурную схему варианта осуществления процессора 130 пространственного процессора TX и передатчиков со 132a по 132t на станции 110 передатчика. В пределах пространственного процессора 130 TX демультиплексор 510 (Демультиплексор) принимает символы данных из процессора 120 данных TX, отображает символы данных и пилотные символы в надлежащие поднесущие и выдает вектор
s
(k) для каждой информационной поднесущей в каждом периоде символа. Блок 516 принимает матрицы
V
(k) управления передачей для назначенных поднесущих (например, от станции 150 приемника или канального процессора 144) и определяет матрицу  (k) управления передачей для каждой информационной поднесущей (например, используя матрицу управления передачей для ближайший назначенной поднесущей или интерполируя матрицы управления передачей для ближайших назначенных поднесущих по обе стороны от информационной поднесущей). Блок 512 выполняет управление передачей над вектором
s
(k) для каждой информационной поднесущей с помощью матрицы
(k) управления передачей для каждой информационной поднесущей (например, используя матрицу управления передачей для ближайший назначенной поднесущей или интерполируя матрицы управления передачей для ближайших назначенных поднесущих по обе стороны от информационной поднесущей). Блок 512 выполняет управление передачей над вектором
s
(k) для каждой информационной поднесущей с помощью матрицы  (k) управления передачей для такой поднесущей и выдает вектор
x
(k) выходных символов, как показано в равенстве (9). Демультиплексор 516 демультиплексирует выходные символы и выдает T потоков выходных символов на T передатчиков со 132a по 132t.
(k) управления передачей для такой поднесущей и выдает вектор
x
(k) выходных символов, как показано в равенстве (9). Демультиплексор 516 демультиплексирует выходные символы и выдает T потоков выходных символов на T передатчиков со 132a по 132t.
Каждый передатчик 132 включает в себя модулятор 520 OFDM (Модулятор) и радиочастотный (РЧ) блок 522. Блок 520 OFDM принимает поток выходных символов из демультиплексора 514 и формирует символы OFDM. РЧ-блок 522 TX обрабатывает символы OFDM и формирует модулированный сигнал для передачи через антенну 134.
Фиг.6 показывает структурную схему варианта осуществления приемников со 154a по 154r и пространственного процессора 160 RX на станции 150 приемника. Каждая антенна 152 принимает модулированные сигналы от станции 110 передатчика и выдает принятый сигнал в соответствующий приемник 154. Каждый приемник 154 включает в себя РЧ-блок 610 RX и демодулятор 612 OFDM (Демодулятор). РЧ-блок 610 RX обрабатывает принятый сигнал и выдает отсчеты. Демодулятор 612 OFDM выполняет демодуляцию OFDM над отсчетами, выдает принятые символы данных в детектор 620 MIMO в пределах пространственного процессора 160 RX и выдает принятые пилотные символы в канальный процессор 194. Канальный процессор 194 оценивает отклик канала MIMO для каждой поднесущей использованием передачи пилот-сигнала на основании принятых пилотных символов для такой поднесущей. Канальный процессор 194 выдает матрицы отклика канала в блок 624 вычисления матриц пространственных фильтров и блок 626 разложения в пространственном процессоре 160 RX.
Блок 626 выполняет разложение по собственным значениям или разложение по сингулярным числам матрицы
H
(k) отклика канала для каждой назначенной поднесущей и выдает матрицу
V
(k) управления передачей для такой поднесущей. Матрицы управления передачей для назначенных поднесущих могут передаваться назад на станцию 110 передатчика или использоваться для формирования управляемого пилот-сигнала для станции 110 передатчика. Блок 626 также выдает матрицу (k) управления передачей для каждой информационной поднесущей в блок 624.
Блок 624 выводит матрицу
M
(k) пространственного фильтра для каждой информационной поднесущей на основании матрицы
H
(k) отклика канала и матрицы (k) управления передачей для такой поднесущей, например, как показано в равенстве (11). Блок 624 может выводить матрицу пространственного фильтра для каждой информационной поднесущей, тогда как блок 626 может выводить матрицу управления передачей для каждой назначенной поднесущей. Отсюда данная матрица
V
(k) управления передачей может использоваться для вывода матриц пространственных фильтров для множества информационных поднесущих. Детектор 620 MIMO выполняет MIMO-обнаружение над принятыми символами данных для каждой информационной поднесущей с помощью матрицы пространственного фильтра для такой поднесущей, например, как показано в равенстве (12), и выдает оценки символов данных. Демультиплексор 622 демультиплексирует оценки символов данных для всех информационных поднесущих и выдает оценки символов данных в процессор 170 данных RX.
Технологии передачи, описанные в материалах настоящей заявки, могут обеспечивать хорошие информационные эксплуатационные показатели с существенным сокращением вычислений и служебных сигналов или данных обратной связи. Компьютерные моделирования выполнялись для различных размерностей MIMO (RЧT), моделей каналов, количества потоков данных и отношений сигнал/шум приемника (SNR). Для случая с L=3 в таблице 1 матрицы управления передачей выводились для 20 из 52 информационных поднесущих, и матрица управления передачей для назначенной поднесущей j использовалась для информационных поднесущих j-1, j и j+1. Вычисления для матриц управления передачей сокращались приблизительно на 60% при потере около 3% пропускной способности для модели E канала по сравнению со случаем, в котором матрица управления передачей вычислялась для каждой информационной поднесущей. Модель E канала имеет минимальную частотную когерентность, и эксплуатационные показатели обычно являются лучшими для других моделей канала. Большие значения L дают большее сокращение вычислений, хотя и с большей потерей пропускной способности.
Фиг.7 показывает вариант осуществления последовательности 700 операций для передачи данных. Станция передатчика принимает канальную информацию для по меньшей мере одной поднесущей, которая является подмножеством множества поднесущих, используемых для передачи данных (этап 710). Канальная информация может содержать по меньшей мере одну матрицу управления передачей, по меньшей мере один набор собственных векторов, по меньшей мере одну матрицу отклика канала или по меньшей мере одну ковариационную матрицу канала для по меньшей мере одной поднесущей. Канальная информация также может содержать неуправляемый пилот-сигнал или управляемый пилот-сигнал, переданный по меньшей мере на одной поднесущей. По меньшей мере одна поднесущая может распределяться по множеству поднесущих и может фиксироваться или изменяться по множеству временных интервалов. Станция передатчика получает матрицы управления передачей для множества поднесущих на основании канальной информации для по меньшей мере одной поднесущей (этап 720). Станция передатчика обрабатывает данные для множества поднесущих матрицами управления передачей, чтобы передавать данные с множества передающих антенн на множество приемных антенн (этап 730).
В варианте осуществления этапа 720 станция передатчика получает по меньшей мере одну матрицу управления передачей для по меньшей мере одной поднесущей из канальной информации (этап 722). Если канальной информацией является неуправляемый пилот-сигнал, то по меньшей мере одна матрица отклика канала может быть получена для по меньшей мере одной поднесущей на основании неуправляемого пилот-сигнала и разложена для получения по меньшей мере одной матрицы управления передачей. Если канальной информацией является управляемый пилот-сигнал, то по меньшей мере одна матрица управления передачей может быть получена непосредственно на основании управляемого пилот-сигнала. Станция передатчика определяет матрицу управления передачей для каждой из множества поднесущих на основании по меньшей мере одной матрицы управления передачей (этап 724). Матрица управления передачей для каждой из множества поднесущих может (1) устанавливаться равной матрице управления передачей для ближайшей одной из по меньшей мере одной поднесущей или (2) выводиться посредством интерполяции двух или более матриц управления передачей для двух или более ближайших поднесущих. В варианте осуществления этапа 730 станция передатчика выполняет управление передачей для каждой из множества поднесущих с помощью матрицы управления передачей для такой поднесущей.
Фиг.8 показывает вариант осуществления устройства 800 для передачи данных. Устройство 800 включает в себя средство для приема канальной информации для по меньшей мере одной поднесущей, которая является подмножеством множества поднесущих, используемых для передачи данных (этап 810), средство для получения матриц управления передачей для множества поднесущих на основании канальной информации для по меньшей мере одной поднесущей (этап 820); и средство для обработки данных для множества поднесущих матрицами управления передачей, для передачи данные с множества передающих антенн на множество приемных антенн (блок 830).
Фиг.9 показывает вариант осуществления последовательности 900 операций для приема данных. Станция приемника передает канальную информацию для по меньшей мере одной поднесущей, которая является подмножеством множества поднесущих, используемых для передачи данных (этап 910). Станция приемника принимает передачу данных, передающую на множества поднесущих с множества передающих антенн на множество приемных антенн, с использованием матриц управления передачей, выведенных для множества поднесущих на основании канальной информации для по меньшей мере одной поднесущей (этап 920).
В варианте осуществления этапа 910 станция приемника получает по меньшей мере одну матрицу отклика канала для по меньшей мере одной поднесущей и выполняет разложение по меньшей мере одной матрицы отклика канала для получения по меньшей мере одной матрицы управления передачей, например, V (k) и/или U (k). Приемник может передать по меньшей мере одну матрицу V (k) управления передачей в качестве канальной информации. Станция приемника также может отображать по меньшей мере одну матрицу V (k) управления передачей в по меньшей мере одно кодовое слово в таблице кодирования и передавать по меньшей мере одно кодовое слово в качестве канальной информации. Станция приемника также может передавать по меньшей мере одну матрицу отклика канала или по меньшей мере одну ковариационную матрицу канала в качестве канальной информации. Станция приемника также может передавать управляемый пилот-сигнал на по меньшей мере одной поднесущей с использованием по меньшей мере одной матрицы U (k) управления передачей. Станция приемника может определять избирательность по частоте или разброс задержек беспроводного канала и определять количество поднесущих для передачи канальной информации на основании избирательности по частоте или разброса задержек беспроводного канала.
В варианте осуществления этапа 920 станция приемника получает множество матрицы отклика канала для множества поднесущих (этап 922) и выполняет разложение по меньшей мере одной матрицы отклика канала для по меньшей мере одной поднесущей, чтобы получать по меньшей мере одну матрицу V (k) управления передачей (этап 924). Станция приемника определяет матрицы управления передачей для множества поднесущих на основании по меньшей мере одной матрицы управления передачей таким же образом, как станция передатчика (этап 926). Станция приемника выводит множество матриц пространственных фильтров для множества поднесущих на основании множества матриц отклика канала и матриц управления передачей для этих поднесущих, например, в соответствии с технологиями MMSE-обнаружения (этап 928). Станция приемника затем выполняет обнаружение для множества поднесущих с помощью множества матриц пространственных фильтров (этап 930).
Фиг.10 показывает вариант осуществления устройства 1000 для приема данных. Устройство 1000 включает в себя средство для передачи канальной информации для по меньшей мере одной поднесущей, которая является подмножеством множества поднесущих, используемых для передачи данных (этап 1010), и средство для приема передачи данных, передаваемой на множество поднесущих с множества передающих антенн на множество приемных антенн, с использованием матриц управления передачей, выводимых для множества поднесущих на основании канальной информации для по меньшей мере одной поднесущей (этап 1020).
Технологии передачи, описанные в материалах настоящей заявки, могут быть реализованы различными средствами. Например, эти технологии могут быть реализованы в аппаратных средствах, микропрограммном обеспечении, программном обеспечении или их комбинации. Для аппаратной реализации блоки обработки в станции передатчика или станции приемника могут быть реализованы в пределах одних или более специализированных интегральных схем (ASIC), цифровых сигнальных процессоров (ЦСП, DSP), устройств цифровой сигнальной обработки (DSPD), программируемых логических устройств (PLD), программируемых пользователем вентильных матриц (FPGA), процессоров, контроллеров, микроконтроллеров, микропроцессоров, электронных устройств, других электронных блоков, предназначенных для выполнения функций, описанных в материалах настоящей заявки, или их комбинации.
Для микропрограммной и/или программной реализации технологии могут быть реализованы блоками (например, процедурами, функциями и так далее), которые выполняют функции, описанные в материалах настоящей заявки. Машинные программы микропрограммного обеспечения и/или программного обеспечения могут храниться в памяти (например, памяти 140 или 192 на фиг.1) и выполняться процессором (например, процессором 140 или 190). Память может быть реализована внутри процессора или внешней по отношению к процессору.
Предшествующее описание раскрытых вариантов осуществления приведено, чтобы дать любому специалисту в данной области техники возможность изготовить или использовать раскрытие. Различные модификации в отношении этих вариантов осуществления будут очевидны специалистам в данной области техники, а общие принципы, определенные в материалах настоящей заявки, могут применяться к другим вариантам осуществления без отклонения от сущности или объема раскрытия. Таким образом, раскрытие не подразумевается ограниченным вариантами осуществления, показанными в материалах настоящей заявки, но должно соответствовать самому широкому объему, согласованному с принципами и новыми признаками, раскрытыми в материалах настоящей заявки.







Настоящее изобретение относится к технологиям для передачи данных с использованием канальной информации для подмножества всех поднесущих, используемых для передачи данных. Станция передатчика принимает канальную информацию для по меньшей мере одной поднесущей, которая является подмножеством множества поднесущих, используемых для передачи данных. Канальная информация может включать в себя по меньшей мере одну матрицу управления передачей, по меньшей мере один набор собственных векторов, по меньшей мере одну матрицу отклика канала, по меньшей мере одну ковариационную матрицу канала, неуправляемый пилот-сигнал или управляемый пилот-сигнал для по меньшей мере одной поднесущей. Станция передатчика получает по меньшей мере одну матрицу управления передачей для по меньшей мере одной поднесущей из канальной информации и определяет матрицу управления передачей для каждой из множества поднесущих. Станция передатчика выполняет управление передачей или управление положением диаграммы направленности для каждой из множества поднесущих с помощью матрицы управления передачей для такой поднесущей. Технический результат изобретения заключается в повышении пропускной способности канала MIMO и улучшении его надежности. 8 н. и 24 з.п. ф-лы, 10 ил., 1 табл.
1. Устройство передачи данных в системе с множеством входов и множеством выходов (MGVIO), содержащее
по меньшей мере один процессор, сконфигурированный для приема канальной информации для по меньшей мере одной поднесущей, которая является подмножеством множества поднесущих, используемых для передачи данных, для получения матриц управления передачей для множества поднесущих на основании канальной информации для по меньшей мере одной поднесущей и для обработки данных для множества поднесущих с помощью матриц управления передачей, чтобы передавать данные с множества передающих антенн на множество приемных антенн, причем по меньшей мере один процессор сконфигурирован для получения по меньшей мере одной матрицы управления передачей для по меньшей мере одной поднесущей на основании канальной информации, для определения матрицы управления передачей для каждой из множества поднесущих на основании по меньшей мере одной матрицы управления передачей и для выполнения управления передачей для каждой из множества поднесущих с помощью матрицы управления передачей, определенной для поднесущей, и для установки матрицы управления передачей для каждой из множества поднесущих равной матрице управления передачей, полученной для ближайшей одной из по меньшей мере одной поднесущей; и
память, связанную с по меньшей мере одним процессором.
2. Устройство по п.1, в котором канальная информация содержит по меньшей мере одну матрицу управления передачей для по меньшей мере одной поднесущей.
3. Устройство по п.1, в котором канальная информация содержит по меньшей мере один собственный вектор для каждой из по меньшей мере одной поднесущей.
4. Устройство по п.1, в котором канальная информация содержит по меньшей мере одну матрицу отклика канала или по меньшей мере одну ковариационную матрицу канала для по меньшей мере одной поднесущей.
5. Устройство по п.1, в котором канальная информация содержит пилот-сигнал, передаваемый на по меньшей мере одной поднесущей, и при этом по меньшей мере один процессор сконфигурирован для получения по меньшей мере одной матрицы управления передачей на основании пилот-сигнала, передаваемого на по меньшей мере одной поднесущей.
6. Устройство по п.1, в котором канальная информация содержит пилот-сигнал, передаваемый на по меньшей мере одной поднесущей, и при этом по меньшей мере один процессор сконфигурирован для получения по меньшей мере одной матрицы отклика канала для по меньшей мере одной поднесущей на основании пилот-сигнала, передаваемого на по меньшей мере одной поднесущей, и для разложения по меньшей мере одной матрицы отклика канала, чтобы получать по меньшей мере одну матрицу управления передачей.
7. Устройство по п.1, в котором по меньшей мере одна поднесущая распределена по множеству поднесущих.
8. Устройство по п.1, в котором по меньшей мере одна поднесущая изменяется по множеству временных интервалов.
9. Способ передачи данных в системе с множеством входов и множеством выходов (MIMO), содержащий
прием канальной информации для по меньшей мере одной поднесущей, которая является подмножеством множества поднесущих, используемых для передачи данных;
получение матрицы управления передачей для множества поднесущих на основании канальной информации для по меньшей мере одной поднесущей;
получение по меньшей мере одной матрицы управления передачей для по меньшей мере одной поднесущей на основании канальной информации, определение матрицы управления передачей для каждой из множества поднесущих на основании по меньшей мере одной матрицы управления передачей и выполнение управления передачей для каждой из множества поднесущих с помощью матрицы управления передачей, определенной для поднесущей, причем определение матрицы управления передачей для каждой из множества поднесущих содержит установку матрицы управления передачей для каждой из множества поднесущих равной матрице управления передачей, полученной для ближайшей одной из по меньшей мере одной поднесущей; и обработку данных для множества поднесущих с помощью матриц управления передачей, чтобы передавать данные с множества передающих антенн на множество приемных антенн.
10. Устройство передачи данных в системе с множеством входов и множеством выходов (MIMO), содержащее
средство приема канальной информации для по меньшей мере одной поднесущей, которая является подмножеством множества поднесущих, используемых для передачи данных;
средство получения матриц управления передачей для множества поднесущих на основании канальной информации для по меньшей мере одной поднесущей;
средство обработки данных для множества поднесущих с помощью матриц управления передачей, чтобы передавать данные с множества передающих антенн на множество приемных антенн,
причем средство обработки данных для множества поднесущих содержит средство получения по меньшей мере одной матрицы управления передачей для по меньшей мере одной поднесущей из канальной информации, средство определения матрицы управления передачей для каждой из множества поднесущих на основании по меньшей мере одной матрицы управления передачей и средство выполнения управления передачей для каждой из множества поднесущих с помощью матрицы управления передачей, определенной для поднесущей, и причем средство определения матрицы управления передачей для каждой из множества поднесущих содержит средство установки матрицы управления передачей для каждой из множества поднесущих равной матрице управления передачей, полученной для ближайшей одной из по меньшей мере одной поднесущей.
11. Машиночитаемый носитель, содержащий сохраненные на нем команды, содержащий
первый набор команд для приема канальной информации для по меньшей мере одной поднесущей, которая является подмножеством множества поднесущих, используемых для передачи данных;
второй набор команд для получения матриц управления передачей для множества поднесущих на основании канальной информации для по меньшей мере одной поднесущей; и
третий набор команд для обработки данных для множества поднесущих с помощью матриц управления передачей, чтобы передавать данные с множества передающих антенн на множество приемных антенн,
причем третий набор команд для обработки данных для множества поднесущих содержит четвертый набор команд для получения по меньшей мере одной матрицы управления передачей для по меньшей мере одной поднесущей из канальной информации, пятый набор команд для определения матрицы управления передачей для каждой из множества поднесущих на основании по меньшей мере одной матрицы управления передачей и шестой набор команд для выполнения управления передачей для каждой из множества поднесущих с помощью матрицы управления передачей, определенной для поднесущей, и причем пятый набор команд для определения матрицы управления передачей для каждой из множества поднесущих содержит седьмой набор команд для установки матрицы управления передачей для каждой из множества поднесущих равной матрице управления передачей, полученной для ближайшей одной из по меньшей мере одной поднесущей.
12. Устройство приема данных в системе с множеством входов и множеством выходов (MIMO), содержащее
по меньшей мере один процессор, сконфигурированный для передачи канальной информации для по меньшей мере одной поднесущей, которая является подмножеством множества поднесущих,
используемых для передачи данных, и для приема переданных данных, переданных на множестве поднесущих с множества передающих антенн на множество приемных антенн, с использованием матриц управления передачей, выведенных для множества поднесущих на основании канальной информации для по меньшей мере одной поднесущей, причем по меньшей мере один процессор сконфигурирован для определения количества поднесущих для передачи канальной информации на основании одного или более параметров условий канала; и
память, связанную с по меньшей мере одним процессором.
13. Устройство по п.12, в котором по меньшей мере один процессор сконфигурирован для получения по меньшей мере одной матрицы отклика канала для по меньшей мере одной поднесущей, для разложения по меньшей мере одной матрицы отклика канала, чтобы получить по меньшей мере одну матрицу управления передачей, и для передачи по меньшей мере одной матрицы управления передачей в качестве канальной информации.
14. Устройство по п.12, в котором по меньшей мере один процессор сконфигурирован для получения по меньшей мере одной матрицы отклика канала для по меньшей мере одной поднесущей, для разложения по меньшей мере одной матрицы отклика канала, чтобы получить по меньшей мере одну матрицу управления передачей, для отображения по меньшей мере одной матрицы управления передачей на по меньшей мере одно кодовое слово в таблице кодирования и для передачи по меньшей мере одного кодового слова в качестве канальной информации.
15. Устройство по п.12, в котором по меньшей мере один процессор сконфигурирован для получения по меньшей мере одной матрицы отклика канала для по меньшей мере одной поднесущей и для передачи по меньшей мере одной матрицы отклика канала в качестве канальной информации.
16. Устройство по п.12, в котором по меньшей мере один процессор сконфигурирован для получения по меньшей мере одной матрицы отклика канала для по меньшей мере одной поднесущей, для вычисления по меньшей мере одной ковариационной матрицы канала для по меньшей мере одной матрицы отклика канала и для передачи по меньшей мере одной ковариационной матрицы канала в качестве канальной информации.
17. Устройство по п.12, в котором по меньшей мере один процессор сконфигурирован для получения по меньшей мере одной матрицы отклика канала для по меньшей мере одной поднесущей, для разложения по меньшей мере одной матрицы отклика канала, чтобы получить по меньшей мере одну матрицу управления передачей, и для передачи управляемого пилот-сигнала на по меньшей мере одной поднесущей с использованием по меньшей мере одной матрицы управления передачей.
18. Устройство по п.12, в котором по меньшей мере один процессор сконфигурирован для получения множества матриц отклика канала для множества поднесущих, для вывода множества матриц пространственных фильтров для множества поднесущих на основании множества матриц отклика канала и для выполнения детектирования для множества поднесущих с помощью множества матриц пространственных фильтров.
19. Устройство по п.18, в котором по меньшей мере один процессор сконфигурирован для разложения по меньшей мере одной матрицы отклика канала для по меньшей мере одной поднесущей, чтобы получить по меньшей мере одну матрицу управления передачей, для определения матриц управления передачей для множества поднесущих на основании по меньшей мере одной матрицы управления передачей и для вывода матрицы пространственного фильтра для каждой из множества поднесущих на основании матрицы отклика канала и матрицы управления передачей для поднесущей.
20. Устройство по п.19, в котором по меньшей мере один процессор сконфигурирован для установки матрицы управления передачей для каждой из множества поднесущих равной матрице управления передачей, полученной для ближайшей одной из по меньшей мере одной поднесущей.
21. Устройство по п.18, в котором по меньшей мере один процессор сконфигурирован для вывода множества матриц пространственных фильтров для множества поднесущих в соответствии с методом обнаружения с минимальной среднеквадратической ошибкой (MMSE).
22. Устройство по п.12, в котором по меньшей мере один процессор сконфигурирован для определения избирательности по частоте беспроводного канала и для определения количества поднесущих для передачи канальной информации на основании избирательности по частоте беспроводного канала.
23. Устройство по п.12, в котором по меньшей мере один процессор сконфигурирован для определения разброса задержек беспроводного канала и для определения количества поднесущих для передачи канальной информации на основании разброса задержек беспроводного канала.
24. Способ приема данных в системе с множеством входов и множеством выходов (MIMO), содержащий
передачу канальной информации для по меньшей мере одной поднесущей, которая является подмножеством множества поднесущих, используемых для передачи данных;
прием переданных данных, переданных на множестве поднесущих с множества передающих антенн на множество приемных антенн, с использованием матриц управления передачей, выведенных для множества поднесущих на основании канальной информации для по меньшей мере одной поднесущей; и определение количества поднесущих для передачи канальной информации на основании одного или более параметров условий канала.
25. Способ по п.24, дополнительно содержащий
получение по меньшей мере одной матрицы отклика канала для по меньшей мере одной поднесущей; и
разложение по меньшей мере одной матрицы отклика канала для получения по меньшей мере одной матрицы управления передачей, при этом канальная информация содержит по меньшей мере одну матрицу управления передачей.
26. Способ по п.24, дополнительно содержащий
получение по меньшей мере одной матрицы отклика канала для по меньшей мере одной поднесущей; и
разложение по меньшей мере одной матрицы отклика канала для получения по меньшей мере одной матрицы управления передачей, и при этом передача канальной информации содержит передачу управляемого пилот-сигнала на по меньшей мере одной поднесущей с использованием по меньшей мере одной матрицы управления передачей.
27. Способ по п.24, дополнительно содержащий
получение множества матриц отклика канала для множества поднесущих;
разложение по меньшей мере одной матрицы отклика канала для по меньшей мере одной поднесущей, чтобы получить по меньшей мере одну матрицу управления передачей;
вывод множества матриц пространственных фильтров для множества поднесущих на основании множества матриц отклика канала и по меньшей мере одной матрицы управления передачей; и
выполнение обнаружения для множества поднесущих с помощью множества матриц пространственных фильтров.
28. Устройство приема данных в системе с множеством входов и множеством выходов (MIMO), содержащее
средство передачи канальной информации для по меньшей мере одной поднесущей, которая является подмножеством множества поднесущих, используемых для передачи данных; и
средство приема переданных данных, переданных на множестве поднесущих с множества передающих антенн на множество приемных антенн, с использованием матриц управления передачей, выведенных для множества поднесущих на основании канальной информации для по меньшей мере одной поднесущей; и
средство определения количества поднесущих для передачи канальной информации на основании одного или более параметров условий канала.
29. Устройство по п.28, дополнительно содержащее
средство получения по меньшей мере одной матрицы отклика канала для по меньшей мере одной поднесущей; и
средство разложения по меньшей мере одной матрицы отклика канала для получения по меньшей мере одной матрицы управления передачей, при этом канальная информация содержит по меньшей мере одну матрицу управления передачей.
30. Устройство по п.28, дополнительно содержащее средство получения по меньшей мере одной матрицы отклика канала для по меньшей мере одной поднесущей; и
средство разложения по меньшей мере одной матрицы отклика канала, чтобы получить по меньшей мере одну матрицу управления передачей, и
при этом средство передачи канальной информации содержит средство передачи управляемого пилот-сигнала на по меньшей мере одной поднесущей с использованием по меньшей мере одной матрицы управления передачей.
31. Устройство по п.28, дополнительно содержащее
средство получения множества матриц отклика канала для множества поднесущих;
средство разложения по меньшей мере одной матрицы отклика канала для по меньшей мере одной поднесущей, чтобы получить по меньшей мере одну матрицу управления передачей;
средство вывода множества матриц пространственных фильтров для множества поднесущих на основании множества матриц отклика канала и по меньшей мере одной матрицы управления передачей; и
средство выполнения обнаружения для множества поднесущих с помощью множества матриц пространственных фильтров.
32. Машиночитаемый носитель, содержащий сохраненные на нем команды, содержащий
первый набор команд для передачи канальной информации для по меньшей мере одной поднесущей, которая является подмножеством множества поднесущих, используемых для передачи данных;
второй набор команд для направления приема переданных данных, переданных на множестве поднесущих с множества передающих антенн на множество приемных антенн, с использованием матриц управления передачей, выведенных для множества поднесущих на основании канальной информации для по меньшей мере одной поднесущей; и
третий набор команд для определения количества поднесущих для передачи канальной информации на основании одного или более параметров условий канала.
| US 2006056531 A1, 16.03.2006 | |||
| RU 2005115862 A, 20.01.2006 | |||
| WO 2005114868 A1, 01.12.2005 | |||
| US 2005111599 A1, 26.05.2005. |

