Область техники, к которой относится изобретение
Автоматический комбинированный микропроцессорный регулятор температуры энергетической установки транспортного средства относится к транспортному машиностроению, в частности к области автоматических систем регулирования температуры теплоносителей (высоконагретой детали, воды, масла, наддувочного воздуха и др.) в системах охлаждения силовых энергетических установок, обмоток тяговых электрических машин, тяговых трансформаторов, элементов тяговых полупроводниковых преобразователей и др. транспортных средств (локомотивов, автомобилей, тракторов и др.).
Уровень техники
Известны автоматические регуляторы температуры, совокупность признаков которых сходна с совокупностью существенных признаков предлагаемого изобретения.
Известен автоматический регулятор температуры теплоносителей энергетической установки, содержащий в качестве управляющего органа пневматический преобразователь температуры с усилителем мощности, а в качестве исполнительно-регулирующего устройства - мембранный пружинный исполнительный механизм и вентилятор с электроприводом и поворотными лопастями [Луков Н.М. Автоматизация тепловозов, газотурбовозов и дизель-поездов. - М.: Машиностроение, 1988, с.186].
Известен также автоматический микропроцессорный регулятор температуры тяговой электрической машины, содержащий микропроцессорный управляющий орган с датчиком тока и датчиком напряжения на контролируемой обмотке тяговой электрической машины, принцип работы которого основан на зависимости активного сопротивления контролируемой обмотки от ее температуры, усилитель выходного сигнала микропроцессорного управляющего органа, преобразователь электрического сигнала в пневматический, усилитель мощности, мембранный пружинный исполнительный механизм, осевой вентилятор с механическим приводом и поворотными лопатками [Космодамианский А.С. Автоматическое регулирование температуры обмоток тяговых электрических машин локомотивов. - М.: Маршрут, 2005, с.182-191].
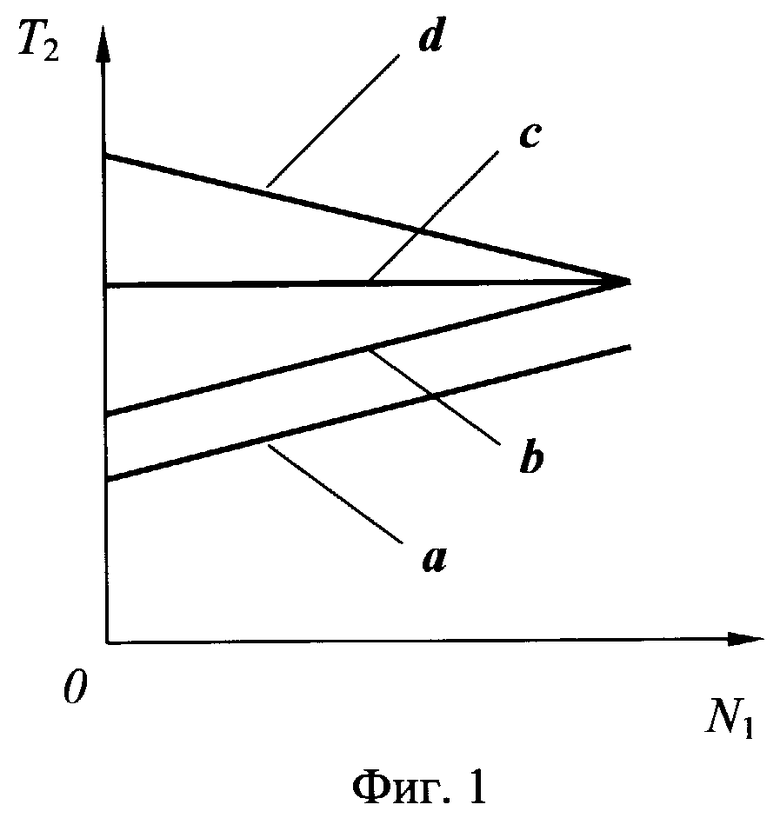
Общий недостаток этих регуляторов температуры заключается в том, что они являются статическими, т.е. П-регуляторами. Автоматические системы регулирования температуры тяговой электрической машины, так же как и автоматические системы регулирования температуры энергетической установки, содержащие П-регуляторы, также являются статическими. Статическая система поддерживает регулируемую температуру Т1 в пределах статической неравномерности (фиг.1. Статические характеристики автоматических систем регулирования температуры: а - с П-регулятором при Т2мин; b - с П-регулятором при Т2макс; с и d - с комбинированными регуляторами температуры), в результате чего регулируемая температура Т1 изменяется как при изменении мощности N энергетической установки, так и при изменении температуры наружного охлаждающего воздуха Т2 (характеристика а на фиг.1). Однако автоматические системы регулирования температуры обмоток электрических машин, трансформаторов и элементов полупроводниковых преобразователей должны поддерживать температуру постоянной независимо от изменений мощности N энергетической установки и температуры наружного охлаждающего воздуха T2 (характеристика с на фиг.1). Постоянство температуры обмоток электрических машин, трансформаторов и элементов полупроводниковых преобразователей обеспечивает более высокую надежность электрических машин, трансформаторов и элементов полупроводниковых преобразователей и меньшие затраты энергии на их охлаждение, чем при колебаниях температуры.
Автоматические системы регулирования температуры высоконагретой детали, воды, масла, наддувочного воздуха и др. энергетической установки должны поддерживать температуру в определенной зависимости от мощности N энергетической установки и независимо от температуры наружного охлаждающего воздуха Т2 (характеристика d на фиг.1), что обеспечивает уменьшение расхода топлива двигателем, повышение его надежности и уменьшение затрат энергии на охлаждение двигателя.
Для того чтобы автоматические системы регулирования температуры могли иметь статические характеристики с и d, представленные на фиг.1, они должны содержать комбинированные регуляторы температуры, использующие дополнительные сигналы управления по мощности N энергетической установки и температуре наружного охлаждающего воздуха T2.
Аналог предлагаемого изобретения, наиболее близкий к нему по совокупности существенных признаков (прототип)
В качестве прототипа предлагаемого изобретения выбран автоматический регулятор температуры с электрическим приводом вентилятора на переменном токе [Патент РФ 2241837. Регулятор температуры энергетической установки транспортного средства / Н.М.Луков, А.С.Космодамианский, И.А.Алейников. - Опубл. 10.12.04., Б.И. №34]. Он представляет собой регулятор температуры Т1 энергетической установки транспортного средства, содержащий источник электроэнергии переменного тока, управляющий орган, вентилятор охлаждения для подачи наружного охлаждающего воздуха с температурой T2, два одинаковых асинхронных двигателя с фазными роторами, статорные обмотки которых подключены к источнику электроэнергии, роторные обмотки соединены последовательно посредством резисторов, а валы двигателей соединены с валом вентилятора охлаждения; статор одного из асинхронных двигателей выполнен поворотным и соединен с механизмом поворота, подключенным к управляющему органу, содержащему датчик температуры Т1.
Этот регулятор также имеет недостатки. Первым недостатком является пониженная на 8-10% максимальная частота вращения вала ω, что обусловлено наличием резисторов в цепи роторных обмоток. Пониженная частота вращения вала приводит к уменьшению мощности электропривода вентилятора охлаждения и к уменьшению КПД привода. Вторым недостатком этого регулятора является наличие шести токосъемных колец и щеточного аппарата, что увеличивает общую длину и массу двигательной установки и снижает ее надежность.
Сущность изобретения
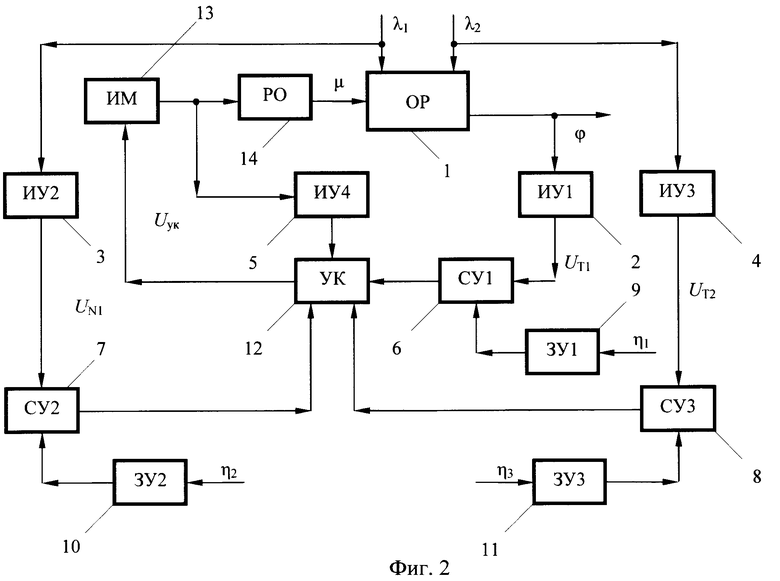
Предлагаемый автоматический комбинированный микропроцессорный регулятор температуры энергетической установки транспортного средства не имеет недостатков известных автоматических регуляторов температуры. Функциональная схема автоматической системы регулирования температуры с предлагаемым регулятором температуры представлена на фиг.2. Обозначения на схеме: ОР - объект регулирования (поз.1); ИУ1 - измерительное устройство - датчик регулируемой величины (поз.2); ИУ2, ИУ3 - измерительные устройства - датчики основных возмущающих воздействий (поз.3 и 4 соответственно); ИУ4 - измерительное устройство - датчик регулирующего воздействия (поз.5); СУ1, СУ2, СУ3 - сравнивающие устройства (поз.6, 7 и 8); ЗУ1, ЗУ2, ЗУ3 - задающие устройства - задатчики заданных значений величин (поз.9, 10 и 11); УК - устройство коррекции коэффициента передачи регулятора по отклонению регулируемой величины от заданного значения, содержащее математическую модель автоматической системы регулирования температуры в статике и динамике (поз.12); ИМ - исполнительный механизм (поз.13); РО - регулирующий орган (поз.14), исполнительный механизм и регулирующий орган образуют исполнительно-регулирующее устройство ИРУ; φ - регулируемая величина; λ1, λ2 - основные возмущающие воздействия на ОР; µ - регулирующее воздействие на объект регулирования; η1÷3 - сигналы задания.
Все функциональные элементы системы регулирования температуры (кроме объекта регулирования ОР) образуют регуляторы температуры: регулятор по отклонению регулируемой температуры Т1 от заданного значения (ИУ1, ЗУ1, СУ1, УК, ИМ и РО) и регуляторы по основным возмущениям: по мощности энергетической установки N1 (ИУ2, ЗУ2, СУ2, УК, ИМ и РО) и по температуре наружного охлаждающего воздуха T2 (ИУ3, ЗУ3, СУ3, УК, ИМ и РО). Регулятор температуры по отклонению вместе с ОР образуют замкнутый контур регулирования в системе регулирования температуры, а регуляторы температуры по возмущениям - разомкнутые контуры регулирования.
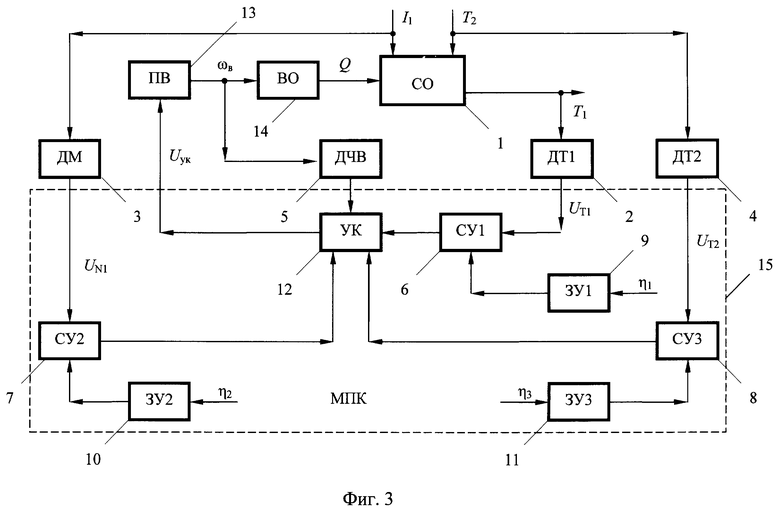
В автоматической системе регулирования температуры с предлагаемым регулятором температуры функции объекта регулирования выполняет система охлаждения энергетической установки СО (поз.1 на фиг.3), функции измерительного устройства ИУ1 выполняет датчик температуры энергетической установки ДТ1 (поз.2). Функции измерительного устройства ИУ2 выполняет датчик мощности энергетической установки ДМ (поз.3), измерительного устройства ИУ3 - датчик температуры наружного охлаждающего воздуха ДТ2 (поз.4), а измерительного устройства ИУ4 - датчик частоты вращения вентилятора охлаждения ДЧВ (поз.5). Функции регулирующего органа РО в системе выполняет вентилятор охлаждения ВО (поз.14), а функции исполнительного механизма ИМ - плавно управляемый привод вентилятора ПВ (поз.13). N2 - мощность, затрачиваемая на привод вентилятора.
В автоматической системе регулирования температуры с предлагаемым регулятором температуры используется два дополнительных сигнала управления: по мощности энергетической установки и по температуре наружного охлаждающего воздуха, поэтому эта система является автоматической комбинированной системой регулирования температуры (АКСРТ) с компенсацией действия основных возмущений: мощности энергетической установки и температуры наружного охлаждающего воздуха. Использование дополнительных сигналов управления позволяет значительно увеличить запасы устойчивости системы и показатели качества ее работы (статическая неравномерность, относительное перерегулирование, время регулирования и др.), то есть уменьшить амплитуду колебаний температуры энергетической установки, повысив тем самым ее надежность и экономичность, а также уменьшить затраты энергии на охлаждение.
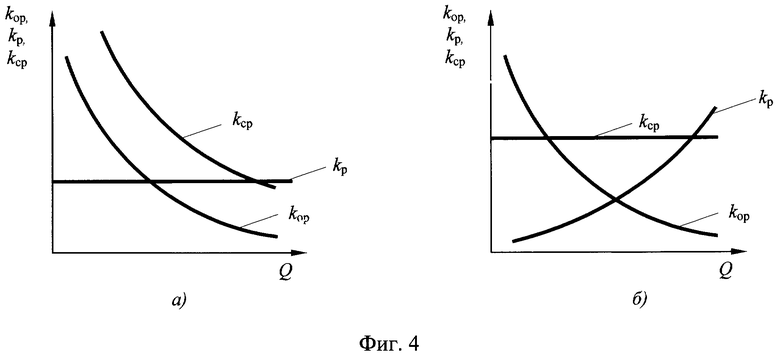
Устойчивость и качество работы автоматической системы регулирования температуры зависят от значений статических (коэффициентов передачи) и динамических (времени запаздывания, постоянных времени) параметров всех функциональных элементов, входящих в ее состав, в частности, от значения такого ее статического параметра, как коэффициент передачи системы регулирования kcp (в разомкнутом состоянии), который равен произведению коэффициента передачи объекта регулирования ОР kop и коэффициента передачи регулятора по отклонению kp (kcp=kop·kp), то есть при постоянном значении kp коэффициент kcp будет изменяться пропорционально коэффициенту kop. Известно [Луков Н.М. Автоматическое регулирование температуры двигателей. - М.: Машиностроение, 1995, стр.36-40], что коэффициент kop систем охлаждения как тепловых объектов регулирования увеличивается при уменьшении тепловой нагрузки, что приводит к увеличению коэффициента kcp и к уменьшению устойчивости и качества работы системы регулирования, то есть к значительным колебаниям регулируемой величины φ. Для системы регулирования температуры энергетической установки это означает, что при уменьшении мощности энергетической установки N1 или температуры наружного охлаждающего воздуха T2 будет увеличиваться kop, что приведет к увеличению коэффициента kcp и к уменьшению устойчивости и качества работы системы регулирования, то есть к колебаниям регулируемой температуры энергетической установки Т1 с большими амплитудами и, как следствие, к уменьшению ее надежности и увеличенным затратам энергии на охлаждение.
Одним из технических результатов предлагаемого изобретения является значительное повышение надежности энергетической установки и ее системы охлаждения и значительное снижение затрат энергии на охлаждение путем обеспечения высокого качества работы системы регулирования температуры при изменении мощности энергетической установки N1 в диапазоне от N1мин до N1макс или температуры наружного охлаждающего воздуха Т2 в диапазоне от Т2мин до Т2макс. Для его достижения в автоматической системе регулирования температуры с предлагаемым регулятором температуры в микропроцессорный контроллер заложена математическая модель автоматической системы регулирования температуры в статике и динамике. Эта математическая модель составляется на сновании уравнений теплового баланса в системе охлаждения и описывает зависимости температуры энергетической установки от подачи вентилятора Q при разных значениях мощности энергетической установки N1 в диапазоне от N1мин до N1макс или температуры наружного охлаждающего воздуха T2 в диапазоне от Т2мин до Т2макс и учитывает изменение статических и динамических параметров всех функциональных элементов, входящих в состав автоматической системы регулирования температуры. Это позволяет системе изменять коэффициент передачи автоматического регулятора температуры по отклонению kp автоматически в зависимости от регулирующего воздействия µ (подачи Q вентилятора) с помощью измерительного устройства ИУ4 и устройства коррекции УК таким образом, чтобы коэффициент передачи системы регулирования (по замкнутому контуру) kcp оставался постоянным при изменении мощности энергетической установки N1 в диапазоне от N1мин до N1макс или температуры наружного охлаждающего воздуха Т2 в диапазоне от Т2мин до Т2макс (см. фиг.4). Таким образом, применение измерительного устройства ИУ4 и устройства коррекции коэффициента передачи УК предлагаемого регулятора температуры по отклонению температуры, содержащего математическую модель автоматической системы регулирования температуры в статике и динамике, позволяет осуществить параметрическую компенсацию действия основных возмущений: мощности энергетической установки и температуры наружного охлаждающего воздуха. В системе функции всех вычислительных устройств (СУ, УК) и ЗУ выполняют блоки математической модели, заложенной в память микропроцессорного контроллера МПК (поз.15 на фиг.3).
Автоматическая комбинированная система регулирования температуры с предлагаемым регулятором температуры работает следующим образом. После достижения температуры Т1 заданного значения при дальнейшем увеличении этой регулируемой температуры начинает увеличиваться выходной сигнал датчика температуры ДТ1 - UT1, сравнивающего устройства СУ1, устройства коррекции УК - Uук, привода вентилятора ПВ - ωв и подачи вентилятора ВО - Q. Плавное увеличение подачи Q вентилятора ВО и теплоотвода из системы охлаждения приводят к стабилизации регулируемой температуры Т1. При этом микропроцессорный контроллер МПК по заложенной в него математической модели автоматической системы регулирования температуры в статике и динамике определяет имеющееся значение коэффициента передачи kop системы охлаждения, то есть вычисляет частную производную (∂Т1/∂Q). Он также вычисляет требуемое значение коэффициента передачи kp=(∂Q/∂T1) регулятора температуры по отклонению, используя заложенное в программу работы МПК заданное значение коэффициента передачи kcp системы регулирования, и изменяет значение коэффициента передачи устройства коррекции УК kук таким образом, чтобы регулятор температуры по отклонению имел значение коэффициента передачи kp, равное рассчитанному для данных значений мощности энергетической установки N1, температуры наружного охлаждающего воздуха T2 и подачи вентилятора ВО Q. После изменения мощности энергетической установки N1 или температуры наружного охлаждающего воздуха T2 и изменения значения подачи Q вентилятора ВО микропроцессорный контроллер по математической модели автоматической системы регулирования температуры в статике и динамике снова определяет новые значения коэффициентов передачи kop и kp и изменяет значение коэффициента передачи устройства коррекции kук.
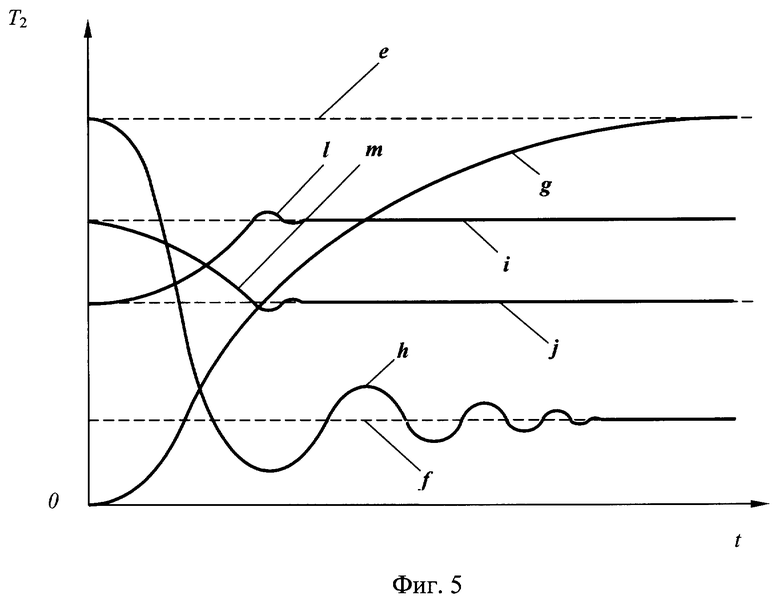
Автоматическая комбинированная система регулирования температуры энергетической установки с предлагаемым регулятором температуры в динамике ведет себя следующим образом. После однократного скачкообразного изменения мощности энергетической установки N1 начинается переходной процесс в системе регулирования температуры (см. фиг.5). Как видно на фиг.5, переходной процесс в статической автоматической системе регулирования температуры (АСРТ) энергетической установки (линии g и h) при N1макс и Т2макс апериодический затянутый с большим временем регулирования τрег. Однако переходной процесс в этой системе регулирования при N1мин и Т2мин колебательный, также с большим временем регулирования τрег. Более того, если бы значение коэффициента передачи регулятора kp этой системы было бы взято несколько большим, то тогда система работала бы в режиме автоколебаний, что привело бы к значительному снижению надежности энергетической установки и значительному увеличению затрат энергии на ее охлаждение. На фиг.5 также видно, что переходные процессы в автоматической комбинированной системе регулирования температуры энергетической установки (линии l и m) как при N1мин и Т2макс, так и при N1мин и Т2мин апериодические граничные с минимальным временем регулирования τрег. Это означает, что автоматическая комбинированная система регулирования температуры энергетической установки при малой статической неравномерности имеет большие запасы устойчивости при изменении мощности и температуры наружного воздуха в широких диапазонах. Причем это достигнуто при значительно меньшей статической неравномерности, чем у статической автоматической системы регулирования температуры.
Принципиальная схема автоматического комбинированного микропроцессорного регулятора температуры энергетической установки транспортного средства представлена на фиг.6. Регулятор содержит датчик 2 регулируемой температуры Т1, датчик 3 мощности энергетической установки N1, датчик 4 температуры наружного охлаждающего воздуха Т2 и датчик 5 частоты вращения ωв вентилятора охлаждения 14, подключенные к микропроцессорному контроллеру 15. К микропроцессорному контроллеру 15 подключен также механизм поворота статора 16 асинхронного двигателя 17, вал которого соединен с валом асинхронного двигателя 18, соединенным в свою очередь с валом вентилятора охлаждения 14. Статорные обмотки 17 и 18 обоих асинхронных двигателей подключены к источнику электроэнергии 19, а их роторные обмотки 20 и 21 соединены посредством резисторов 22, параллельно которым подключены контакты автоматического выключателя 23 резисторов.
В предлагаемом регуляторе вместо двух одинаковых асинхронных двигателей с фазным ротором, один из которых имеет поворотный статор, применена асинхронная плавноуправляемая двухдвигательная установка с поворотным статором одного двигателя.
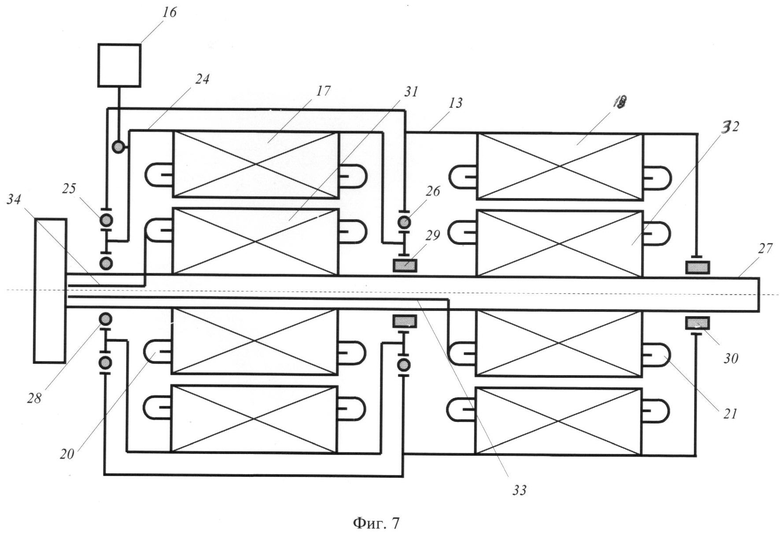
Асинхронная плавноуправляемая двухдвигательная установка с поворотным статором одного двигателя, принципиальная схема которой представлена на фиг.7, содержит: общий корпус 13, в котором установлены два одинаковых статора - поворотный 17 и неповоротный 18. Поворотный статор 17, корпус 24 которого установлен на подшипниках 25 и 26, соединен с механизмом поворота 16. Общий вал 27 установлен на подшипниках 28, 29 и 30. На общем валу 27, в свою очередь, размещены два одинаковых ротора 31 и 32 с обмотками 20 и 21, подключенными посредством проводов 33 и 34 к резисторам 22 и к автоматическому выключателю 23 резисторов.
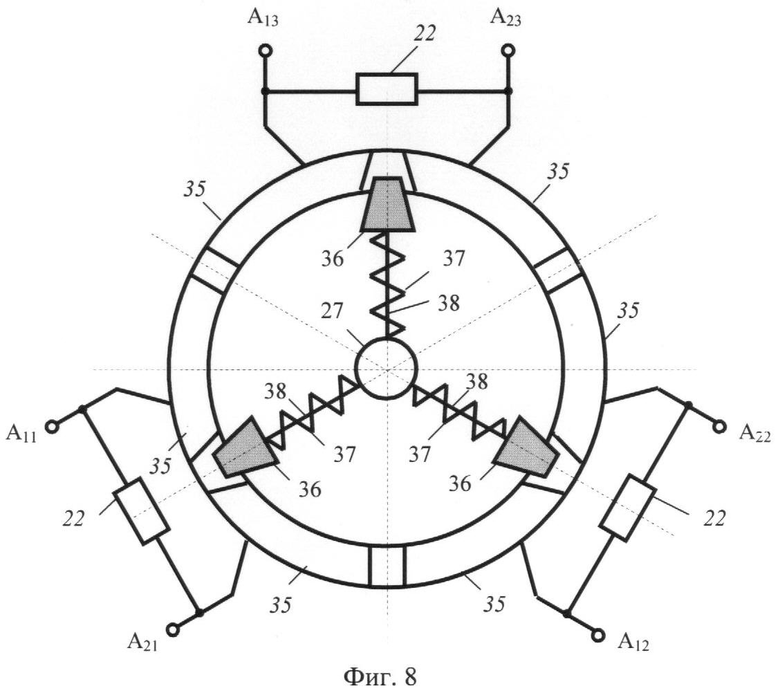
Автоматический выключатель 23 (см. фиг.8) содержит следующие элементы: резисторы 22 и неподвижные контактные элементы 35, установленные на валу 27, подвижные контактные элементы 36, установленные на упругих элементах 37 с возможностью радиального перемещения по направляющим 38. Для ускорения процессов замыкания (включения резисторов 22) и размыкания (выключения резисторов 22) неподвижных контактных элементов 35 подвижными контактными элементами 36 контактные элементы выполнены намагниченными. К выводам А11 и A21, A12 и А22, A13 и А23 подключаются роторные обмотки 20 и 21 посредством кабельных проводов 33 и 34.
Предлагаемый автоматический комбинированный микропроцессорный регулятор температуры энергетической установки транспортного средства в соответствии с алгоритмами его работы, заложенными в программу работы микропроцессорного контроллера 15, работает следующим образом.
При значении регулируемой температуры Т1 меньше минимального значения Т1min выходные сигналы UT1 датчика температуры 2 и Uук микропроцессорного контроллера 15 имеют минимальные значения, при этом выходной сигнал механизма поворота статора 17 αс также имеет минимальное значение αс min. Статор асинхронного двигателя 17 занимает положение (т.е. имеет угол поворота β), при котором скорость вращения вала вентилятора ωв, сигнал на выходе датчика частоты вращения вала вентилятора охлаждения Uω и его подача Q равны нулю. Это обусловлено тем, что при согласованном положении статоров асинхронных двигателей 17 и 18, когда β=0 эл. градусов, ЭДС EP в роторных обмотках направлены встречно и суммарная Ер=Ep1+Ер2=0. При этом ток в роторной цепи I2 равен нулю и двигатели 17 и 18 привода вентилятора имеют вращающий момент М, равный нулю, и скорость вращения вентилятора охлаждения 14 ωв=0.
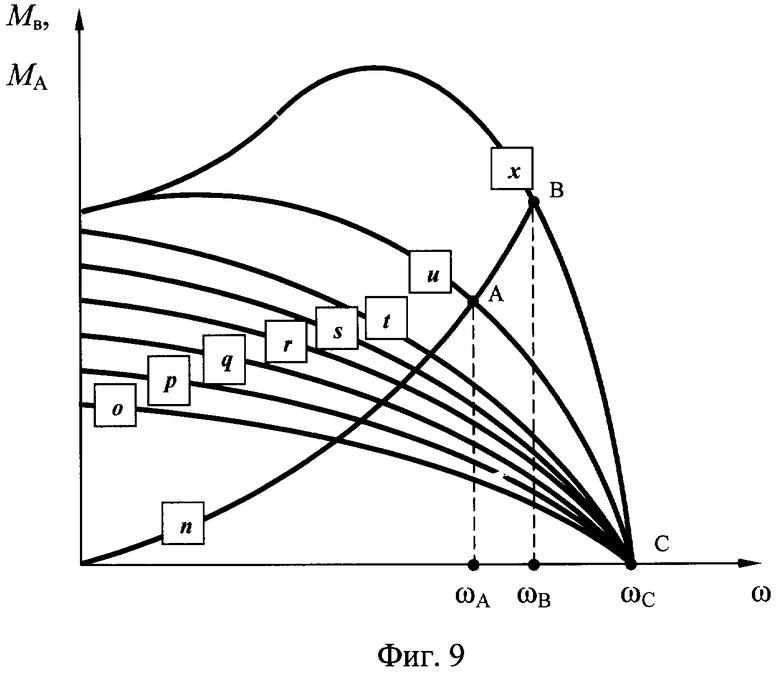
При увеличении температуры Т1 и достижении ею значения выше T1min увеличивается выходной сигнал датчика температуры 1 UT1, увеличиваются сигнал αс и угол β. При этом ЭДС Ep1>0; в обмотках роторов асинхронных двигателей 17 и 18 будет ток I2>0, электропривод вентилятора будет иметь момент М>0 и скорость вращения ωв>0, при этом увеличится подача Q вентилятора 14. Процесс увеличения сигналов T1, IT1, Uук, αc, β, Ер1, I2 и ωв будет продолжаться до тех пор, пока не наступит равновесный тепловой режим работы системы охлаждения энергетической установки. При изменении угла β от 0 до 90° эл. один из асинхронных двигателей будет работать в генераторном (тормозном) режиме, а второй - в двигательном режиме. При дальнейшем увеличении угла β и выполнении условия 90° эл. <β<180° эл. обе активные составляющие тока I2>0, т.е. оба асинхронных двигателя работают в двигательном режиме, развивая разные моменты. В предельном случае, когда угол β=180° эл., векторы ЭДС обмоток роторов совпадают и Ep=Ер1+Еp2; асинхронные двигатели развивают одинаковые моменты, работая как два обычных асинхронных двигателя. При температуре Т1=Т1 max сигналы UT1, Uу, αс, β и ωв максимальны. При этом угол β достигает 180° эл., т.е. статор асинхронного двигателя 17 займет положение, при котором частота вращения вентилятора охлаждения 14 ωв max из-за наличия резисторов 22 в цепи роторных обмоток 20 и 21 будет меньше максимальной асинхронной (при отсутствии резисторов в цепи роторных обмоток) на 7-9%, а это значит, что мощность вентилятора будет на 26-32% меньше, чем при максимальной асинхронной частоте вращения ω. Однако при наличии на валу двигательной установки выключателя 23 резисторов 22 при частоте вращения вала 27 ω на 15-20% меньше синхронной частоты вращения ωс подвижные контактные элементы 36, притянутые упругими элементами 37, находятся в ближнем к оси вращения вала 27 положении. При этом резисторы 22 включены в цепи роторных обмоток. При увеличении частоты вращения вала 27 ω до значения на 10-15% меньше максимальной синхронной ωc подвижные контактные элементы 36 под действием центробежных сил, преодолевая силы упругих элементов 37, перемещаются по направляющим 38 в сторону от оси вращения вала 27 и замыкают неподвижные контактные элементы 35, закорачивая резисторы 22. При этом происходит переход двигателей в режим работы по естественной механической характеристике М(ω) (см. фиг.9). Закорачивание резисторов 22 приводит к увеличению тока в роторной цепи и частоты вращения вала ω до значения на 2-3% меньше максимальной синхронной частоты вращения. Это приводит к увеличению максимальной мощности двигательной установки на 26-32% и к увеличению ее КПД на 4-6%.
Если мощность N1 энергетической установки начнет увеличиваться, то это приводит к увеличению выходных сигналов IN1 датчика 3 и выходного сигнала Uук микропроцессорного контроллера 15, что в свою очередь приводит к увеличению частоты вращения ωв и подачи Q осевого вентилятора 14 и к увеличению теплоотвода в охладителе без изменения температуры Т1. Это изменение подачи Q осевого вентилятора 14 происходит каждый раз при изменении мощности N1 энергетической установки.
Увеличение температуры Т2 наружного охлаждающего воздуха приводит к увеличению выходных сигналов UT2 датчика 4 температуры наружного охлаждающего воздуха и Uук микропроцессорного контроллера 15. Это в свою очередь приводит к увеличению частоты вращения ωв и подачи Q осевого вентилятора 14 и к увеличению теплоотвода в охладителе энергетической установки. Это изменение подачи Q осевого вентилятора 14 происходит каждый раз при изменении температуры T2 наружного охлаждающего воздуха.
Таким образом, изменения мощности N1 энергетической установки или температуры T2 наружного охлаждающего воздуха приводят к соответствующим изменениям частоты вращения ωв и подачи Q осевого вентилятора 14 при сохранении регулируемой температуры T1 на заданном уровне (в соответствии со статическими характеристиками 2 или 3, представленными на фиг.1), то есть Q (T1, Т2, N1). Такое комбинированное регулирование температуры Т1 с использованием дополнительных сигналов управления по мощности N1 энергетической установки и по температуре T2 наружного охлаждающего воздуха, которые суммируются с сигналом по регулируемой температуре T1 в соответствии с алгоритмом работы регулятора температуры, заложенным в программу работы микропроцессорного контроллера 15, обеспечивает точное поддержание ее на заданном уровне без колебаний.
С целью обеспечения высокого качества работы системы регулирования температуры Т1 при всех условиях и режимах работы энергетической установки в предлагаемом автоматическом комбинированном микропроцессорном регуляторе коэффициент передачи автоматического регулятора kp изменяется автоматически в зависимости от регулирующего воздействия µ (подачи Q или частоты вращения вентилятора охлаждения) с помощью ИУ4 и УК таким образом, чтобы коэффициент передачи системы регулирования (по замкнутому контуру) kcp оставался примерно постоянным при всех значениях мощности N1 энергетической установки и при всех температурах наружного охлаждающего воздуха Т2 (фиг.4). Таким образом, применение измерительного устройства ИУ4 и устройства коррекции УК позволяет осуществить параметрическую компенсацию действия основных возмущений: мощности N1 энергетической установки и температуры наружного охлаждающего воздуха T2.
Технический результат, который может быть получен при осуществлении предлагаемого изобретения
Предлагаемое изобретение обеспечивает получение следующих видов технического результата. Автоматический комбинированный микропроцессорный регулятор температуры энергетической установки транспортного средства является не статическим, т.е. не П-регулятором, а комбинированным регулятором температуры. Автоматическая система регулирования температуры с предлагаемым комбинированным регулятором имеет статическую неравномерность, равную нулю или отрицательную. Известно, что только комбинированные системы регулирования температуры имеют большие запасы устойчивости и высокие показатели качества работы. Это значительно повышает экономичность и надежность энергетической установки и ее системы охлаждения.
Другим видом технического результата от применения предлагаемого автоматического комбинированного микропроцессорного регулятора температуры энергетической установки транспортного средства является повышенная на 7-9% максимальная частота вращения вала ω, что обусловлено выключением резисторов из цепи роторных обмоток. Повышенная частота вращения вала ω приводит к увеличению мощности электропривода вентилятора охлаждения на 26-32% и к увеличению КПД привода на 4-6%.
Следующим видом технического результата от применения предлагаемого автоматического комбинированного микропроцессорного регулятора температуры энергетической установки транспортного средства является отсутствие шести токосъемных колец и двух щеточных аппаратов, что уменьшает общую длину и массу двигательной установки и повышает ее надежность. Уменьшение габаритных размеров и массы элементов регулятора температуры имеет очень важное значение для повышения технико-экономических показателей энергетической установки транспортного средства.
Технический результат, который может быть получен при осуществлении предлагаемого изобретения, достигается за счет того, что автоматический комбинированный микропроцессорный регулятор температуры энергетической установки транспортного средства содержит: источник электроэнергии переменного тока, управляющий орган с датчиком температуры энергетической установки, датчиком мощности энергетической установки, датчиком температуры наружного охлаждающего воздуха, датчиком частоты вращения вала вентилятора охлаждения; первое, второе и третье задающие устройства; первое, второе и третье сравнивающие устройства. Датчик температуры энергетической установки подключен к первому сравнивающему устройству, датчик мощности энергетической установки подключен ко второму сравнивающему устройству, датчик температуры наружного охлаждающего воздуха подключен к третьему сравнивающему устройству. К первому, второму и третьему сравнивающим устройствам подключены соответственно первое, второе и третье задающие устройства. Автоматический комбинированный микропроцессорный регулятор температуры энергетической установки транспортного средства содержит также одинаковые асинхронные двигатели с фазными роторами, статорные обмотки которых подключены к источнику электроэнергии, роторные обмотки соединены последовательно посредством резисторов, а валы двигателей соединены с валом вентилятора охлаждения. Статор одного из асинхронных двигателей выполнен поворотным и соединен с механизмом поворота, подключенным к управляющему органу. Управляющий орган содержит устройство коррекции коэффициента передачи регулятора температуры по частоте вращения вала вентилятора охлаждения в соответствии с заложенной в память управляющего органа математической моделью автоматической системы регулирования температуры в статике и динамике и предназначенное для алгебраического суммирования выходных сигналов датчика температуры энергетической установки, датчика мощности энергетической установки, датчика температуры наружного охлаждающего воздуха и автоматического изменения коэффициента передачи регулятора температуры таким образом, чтобы коэффициент передачи системы регулирования оставался бы постоянным в заданном диапазоне изменения мощности энергетической установки, температуры наружного охлаждающего воздуха и частоты вращения вала вентилятора охлаждения. Первое, второе и третье сравнивающие устройства, а также датчик частоты вращения вала вентилятора охлаждения подключены к устройству коррекции коэффициента передачи регулятора. Устройство коррекции коэффициента передачи регулятора подключено в свою очередь к механизму поворота статора асинхронного двигателя, который вместе со вторым асинхронным двигателем образуют асинхронную плавноуправляемую двухдвигательную установку, содержащую общий корпус с установленными в нем общим валом на трех подшипниках, неподвижным статором и корпусом с поворотным статором, установленным на двух подшипниках на общем валу, на котором также закреплены фазные роторы и резисторы с автоматическим выключателем резисторов, содержащим неподвижные контактные элементы, подключенные попарно параллельно резисторам и образующие попарно друг с другом радиальные конические зазоры, против которых на упругих элементах установлены подвижные контактные элементы с возможностью радиального перемещения по направляющим и возможностью образования контакта с неподвижными контактными элементами под действием центробежных сил.
Перечень фигур
Фиг.1. Статические характеристики автоматических систем регулирования температуры:
а - с П-регулятором при Т2мин; b - с П-регулятором при Т2макс; с и d - с комбинированными регуляторами температуры
Фиг.2. Функциональная схема автоматической системы регулирования температуры энергетической установки транспортного средства
Фиг.3. Принципиальная блок-схема автоматической системы регулирования температуры энергетической установки транспортного средства
Фиг.4. Зависимости коэффициентов kop, kp и kcp от подачи вентилятора Q при постоянном коэффициенте kp (а) и при постоянном коэффициенте kcp (б)
Фиг.5. Линии ограничения диапазонов регулирования (статических неравномерностей) (e, f, i и j) и временные переходные характеристики (g, h, l и m) статической (линии е - h) и комбинированной (предлагаемой) (линии i - m) автоматических систем регулирования температуры энергетической установки после изменения мощности N1 от N1мин до N1макс при температуре наружного охлаждающего воздуха Т2макс (линии g и l) и от N1макс до N1мин при Т2мин (линии h и m)
Фиг.6. Принципиальная схема автоматического комбинированного микропроцессорного регулятора температуры энергетической установки транспортного средства
Фиг.7. Принципиальная схема асинхронной плавноуправляемой двухдвигательной установки с поворотным статором одного двигателя
Фиг.8. Принципиальная схема автоматического выключателя резисторов
Фиг.9. Механические характеристики асинхронной плавноуправляемой двухдвигательной установки с поворотным статором одного двигателя: n - вентилятора охлаждения (агрегата нагрузки, Мв - момент сопротивления вентилятора); о÷u - установки при разных углах β и при включенных в цепи роторных обмоток резисторах; x - установки при закороченных резисторах 22 (естественная характеристика двигателей); ωA, ωB и ωC - частоты вращения вала 27 при включенных резисторах 22, при выключенных (закороченных) резисторах 22 и синхронная соответственно.
Источники информации
1. Луков H.М. Основы автоматики и автоматизации тепловозов. - М.: Транспорт, 1989.
2. Луков H.М. Автоматическое регулирование температуры двигателей. - М. Машиностроение, 1977.
3. Луков H.М. Автоматическое регулирование температуры двигателей. - М. Машиностроение, 1995.
4. Луков H.М. Автоматизация тепловозов, газотурбовозов и дизель-поездов. - М.: Машиностроение, 1988.
5. Космодамианский А.С. Автоматическое регулирование температуры обмоток тяговых электрических машин локомотивов. - М.: Маршрут, 2005.
6. Винокуров В.А., Попов Д.А. Электрические машины железнодорожного транспорта. - М.: Транспорт, 1986.
7. Патент РФ 2241837. Регулятор температуры энергетической установки транспортного средства / Н.М.Луков, А.С.Космодамианский, И.А.Алейников. - Опубл. 10.12.04., Б.И. №34.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКИЙ КОМБИНИРОВАННЫЙ МИКРОПРОЦЕССОРНЫЙ РЕГУЛЯТОР ТЕМПЕРАТУРЫ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2369752C2 |
| АВТОМАТИЧЕСКАЯ КОМБИНИРОВАННАЯ МИКРОПРОЦЕССОРНАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ СГЛАЖИВАЮЩЕГО РЕАКТОРА ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2406622C2 |
| АВТОМАТИЧЕСКИЙ КОМБИНИРОВАННЫЙ МИКРОПРОЦЕССОРНЫЙ РЕГУЛЯТОР ТЕМПЕРАТУРЫ ТЕПЛОВОЙ МАШИНЫ С ЭЛЕКТРИЧЕСКИМ ПРИВОДОМ ВЕНТИЛЯТОРА | 2011 |
|
RU2501961C2 |
| Автоматическая микропроцессорная система регулирования температуры энергетической установки транспортного средства | 2016 |
|
RU2645519C1 |
| МИКРОПРОЦЕССОРНЫЙ КОМБИНИРОВАННЫЙ РЕГУЛЯТОР ТЕМПЕРАТУРЫ ТЕПЛОВОЙ МАШИНЫ | 2007 |
|
RU2355015C1 |
| АВТОМАТИЧЕСКИЙ КОМБИНИРОВАННЫЙ МИКРОПРОЦЕССОРНЫЙ РЕГУЛЯТОР ТЕМПЕРАТУРЫ ТЕПЛОВОЙ МАШИНЫ С МЕХАНИЧЕСКИМ ПРИВОДОМ ВЕНТИЛЯТОРА | 2011 |
|
RU2492335C2 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ ОБМОТОК ТЯГОВЫХ ЭЛЕКТРИЧЕСКИХ МАШИН С ЭЛЕКТРИЧЕСКИМ НА ПЕРЕМЕННОМ ТОКЕ ПРИВОДОМ ВЕНТИЛЯТОРА | 2003 |
|
RU2256996C1 |
| СИСТЕМА ВОЗДУШНОГО ОХЛАЖДЕНИЯ БЛОКОВ ПУСКОТОРМОЗНЫХ РЕЗИСТОРОВ | 2010 |
|
RU2465152C2 |
| СПОСОБ ВОЗДУШНОГО ОХЛАЖДЕНИЯ БЛОКОВ ПУСКО-ТОРМОЗНЫХ РЕЗИСТОРОВ | 2010 |
|
RU2462603C2 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ ОХЛАЖДАЮЩЕЙ СРЕДЫ ТЕПЛОВОЙ МАШИНЫ | 2003 |
|
RU2264544C2 |
Изобретение относится к области транспортного машиностроения и может быть использовано для регулирования температуры теплоносителей (высоконагретой детали, воды, масла, наддувочного воздуха и др.) и в системах охлаждения силовых энергетических установок, обмоток тяговых электрических машин, тяговых трансформаторов, элементов тяговых полупроводниковых преобразователей. Техническим результатом является повышение надежности и снижение затрат энергии на охлаждение. Автоматический комбинированный микропроцессорный регулятор температуры энергетической установки транспортного средства содержит: источник электроэнергии переменного тока, управляющий орган с датчиком температуры энергетической установки, датчиком мощности энергетической установки, датчиком температуры наружного охлаждающего воздуха, датчиком частоты вращения вала вентилятора охлаждения; три задающих устройства; три сравнивающих устройства, два одинаковых асинхронных двигателя с фазными роторами, источник электроэнергии, вентилятор охлаждения, механизм поворота статора одного из двигателей. Управляющий орган снабжен устройством коррекции коэффициента передачи регулятора температуры по частоте вращения вала вентилятора охлаждения в соответствии с заложенной в память управляющего органа математической моделью автоматической системы регулирования температуры в статике и динамике. Управляющий орган предназначен для алгебраического суммирования выходных сигналов датчика температуры энергетической установки, датчика мощности энергетической установки, датчика температуры наружного охлаждающего воздуха и автоматического изменения коэффициента передачи регулятора температуры таким образом, чтобы коэффициент передачи системы регулирования оставался бы постоянным в заданном диапазоне изменения мощности энергетической установки, температуры наружного охлаждающего воздуха и частоты вращения вала вентилятора охлаждения. Указанные элементы и конструктивное выполнение асинхронных двигателей осуществлено так, как указано в материалах заявки. 9 ил.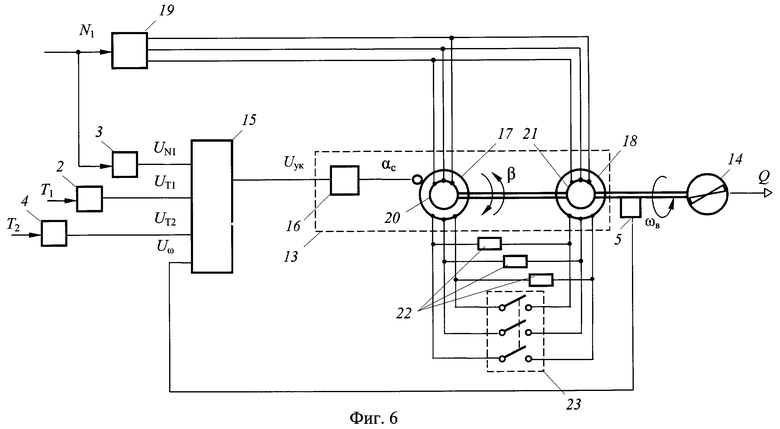
Автоматический комбинированный микропроцессорный регулятор температуры энергетической установки транспортного средства, содержащий источник электроэнергии переменного тока, управляющий орган, содержащий датчик температуры энергетической установки, датчик мощности энергетической установки, датчик температуры наружного охлаждающего воздуха, датчик частоты вращения вала вентилятора охлаждения; первое, второе и третье задающие устройства; первое, второе и третье сравнивающие устройства; причем датчик температуры энергетической установки подключен к первому сравнивающему устройству, датчик мощности энергетической установки подключен ко второму сравнивающему устройству, датчик температуры наружного охлаждающего воздуха подключен к третьему сравнивающему устройству; к первому, второму и третьему сравнивающим устройствам подключены соответственно первое, второе и третье задающие устройства; одинаковые асинхронные двигатели с фазными роторами, статорные обмотки которых подключены к источнику электроэнергии, роторные обмотки соединены последовательно посредством резисторов, а валы двигателей соединены с валом вентилятора охлаждения, статор одного из асинхронных двигателей выполнен поворотным и соединен с механизмом поворота, подключенным к управляющему органу, отличающийся тем, что управляющий орган содержит устройство коррекции коэффициента передачи регулятора температуры по частоте вращения вала вентилятора охлаждения в соответствии с заложенной в память управляющего органа математической моделью автоматической системы регулирования температуры в статике и динамике и предназначенное для алгебраического суммирования выходных сигналов датчика температуры энергетической установки, датчика мощности энергетической установки, датчика температуры наружного охлаждающего воздуха и автоматического изменения коэффициента передачи регулятора температуры таким образом, чтобы коэффициент передачи системы регулирования оставался бы постоянным в заданном диапазоне изменения мощности энергетической установки, температуры наружного охлаждающего воздуха и частоты вращения вала вентилятора охлаждения; причем первое, второе и третье сравнивающие устройства, а также датчик частоты вращения вала вентилятора охлаждения подключены к устройству коррекции коэффициента передачи регулятора; устройство коррекции коэффициента передачи регулятора подключено в свою очередь к механизму поворота статора асинхронного двигателя, который вместе со вторым асинхронным двигателем образуют асинхронную плавноуправляемую двухдвигательную установку, содержащую общий корпус с установленными в нем общим валом на трех подшипниках, неподвижным статором и корпусом с поворотным статором, установленном на двух подшипниках на общем валу, на котором также закреплены фазные роторы и резисторы с автоматическим выключателем резисторов, содержащим неподвижные контактные элементы, подключенные попарно параллельно резисторам и образующие попарно друг с другом радиальные конические зазоры, против которых на упругих элементах установлены подвижные контактные элементы с возможностью радиального перемещения по направляющим и возможностью образования контакта с неподвижными контактными элементами под действием центробежных сил.
| РЕГУЛЯТОР ТЕМПЕРАТУРЫ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2241837C2 |
| АВТОМАТИЧЕСКИЙ КОМБИНИРОВАННЫЙ МИКРОПРОЦЕССОРНЫЙ РЕГУЛЯТОР ТЕМПЕРАТУРЫ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2369752C2 |
| РЕГУЛЯТОР ТЕМПЕРАТУРЫ ОБМОТОК ТЯГОВЫХ ЭЛЕКТРИЧЕСКИХ МАШИН ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2251779C2 |
| ПАРОФАЗНЫЕ ИНГИБИТОРЫ КОРРОЗИИ И СПОСОБ ИХ ПОЛУЧЕНИЯ | 2008 |
|
RU2453632C2 |
| US 6066935 A, 23.05.2000 | |||
| Способ отбора пациентов с сахарным диабетом 2 типа в группу риска по развитию эндотелиальной дисфункции | 2015 |
|
RU2607187C1 |

