Область техники, к которой относится изобретение
Автоматический комбинированный микропроцессорный регулятор температуры тепловой машины с электрическим приводом вентилятора относится к транспортному машиностроению, в частности, к области автоматических систем регулирования температуры теплоносителей (высоконагретой детали, воды, масла, наддувочного воздуха и др.) в системах охлаждения силовых энергетических установок, обмоток тяговых электрических машин, тяговых трансформаторов, элементов тяговых полупроводниковых преобразователей и др. транспортных средств (локомотивов, автомобилей, тракторов и др.).
Уровень техники
Известны автоматические регуляторы температуры, совокупность признаков которых сходна с совокупностью существенных признаков предполагаемого изобретения.
Известен регулятор температуры энергетической установки транспортного средства, содержащий источник электроэнергии переменного тока, управляющий орган, асинхронный двигатель и вентилятор охлаждения [Патент РФ №2241837]. В регуляторе применены два одинаковых асинхронных двигателя с фазными роторами, статорные обмотки которых подключены к источнику электроэнергии, роторные обмотки соединены последовательно посредством резисторов, а валы соединены с валом вентилятора охлаждения. Статор одного из асинхронных двигателей выполнен поворотным и соединен с механизмом поворота, подключенным к управляющему органу. Этот регулятор температуры с электрическим приводом вентилятора имеет существенные недостатки. Регулятор отличается большой сложностью, пониженной надежностью и пониженным КПД. В регуляторе применено два двигателя вместо одного. Один из двигателей выполнен с поворотным статором, соединенным с механизмом поворота. Двигатели с фазным ротором имеют надежность меньшую, чем надежность двигателей с короткозамкнутым ротором. Из-за наличия в цепи роторных обмоток двигателей резисторов номинальные значения КПД двигателей понижены на 6-9%.
Известны асинхронные многоскоростные двигатели с короткозамкнутым ротором, в которых статорная обмотка имеет полюсопереключаемые обмотки:
1. Для двухскоростных двигателей: р=5:3, ω1=600 и ω2=1000 об/мин [А.с. СССР №9952121; р=12:3, ω1=250 и ω2=1000 об/мин [А.с. СССР №1721731]; р=8:4, ω1=375 и ω2=750 об/мин [Патент РФ №2345463].
2. Для трехскоростных двигателей: р=5:2:1, ω1=600, ω2=1500 об/мин и ω3=3000 об/мин [А.с. СССР №884039]; р=10:4:2, ω1=300, ω2=750 об/мин и ω3=1500 об/мин [А.с. СССР №1086511]; р=5:2:1, ω1=600, ω2=1500 об/мин и ω3=3000 об/мин [Патент РФ №2285994]; р=7:5:3, ω1=430, ω2=600 об/мин и ω3=1000 об/мин [Патент РФ №2298273].
3. Для четырехскоростных двигателей: р=8:4:2:1, ω1=375, ω2=750 об/мин, ω3=1500 об/мин и ω4=3000 об/мин [Патент РФ №2014711]; р=8:4:2:1, ω1=375, ω2=750 об/мин, ω3=1500об/мин и ω4=3000 об/мин [Патент РФ №2020693].
Известны также пятискоростные двигатели для которых: р=10:6:4:3:2, ω1=300, ω2=500 об/мин, ω3=750 об/мин, ω4=1000 об/мин и ω5=1500 об/мин.
Таким образом, имеется возможность широкого выбора трехфазных полюсопереключаемых обмоток для многоскоростных асинхронных двигателей.
Аналог предполагаемого изобретения, наиболее близкий к нему по совокупности существенных признаков (прототип)
Известен регулятор температуры энергетической установки транспортного средства, который содержит источник электроэнергии переменного тока, например, синхронный генератор, приводимый во вращение от теплового двигателя, управляющий орган, асинхронный двигатель и вентилятор охлаждения [Патент РФ №2214929]. Асинхронный двигатель выполнен с фазным ротором, статорная обмотка его подключена к источнику электроэнергии, а роторная - к преобразователю частоты. Преобразователь частоты подключен к источнику электроэнергии и к блоку управления преобразователем частоты, соединенному с управляющим органом и роторной обмоткой асинхронного двигателя.
Известные автоматические регуляторы температуры энергетических установок транспортных средств с электроприводом вентилятора охлаждения на переменном токе имеют существенные недостатки. В автоматических регуляторах температуры с частотным управлением асинхронным двигателем вентилятора охлаждения применяются преобразователи частоты со звеном постоянного тока, имеющие определенные габаритные размеры, вес и стоимость. Цена универсального трехфазного преобразователя частоты с фильтром радиопомех к нему превышает цену асинхронного двигателя приблизительно в полтора десятка раз [Ванурин В.Н. Статорные обмотки асинхронных двигателей. - Зерноград, ВПИПТИМЭСХ. - 2001. С.164]. При частотном управлении асинхронным двигателем с вентиляторпой нагрузкой его КПД снижается, а нагрев увеличивается из-за несинусоидальности питающего напряжения, особенно в зоне частичных нагрузок.
Сущность изобретения
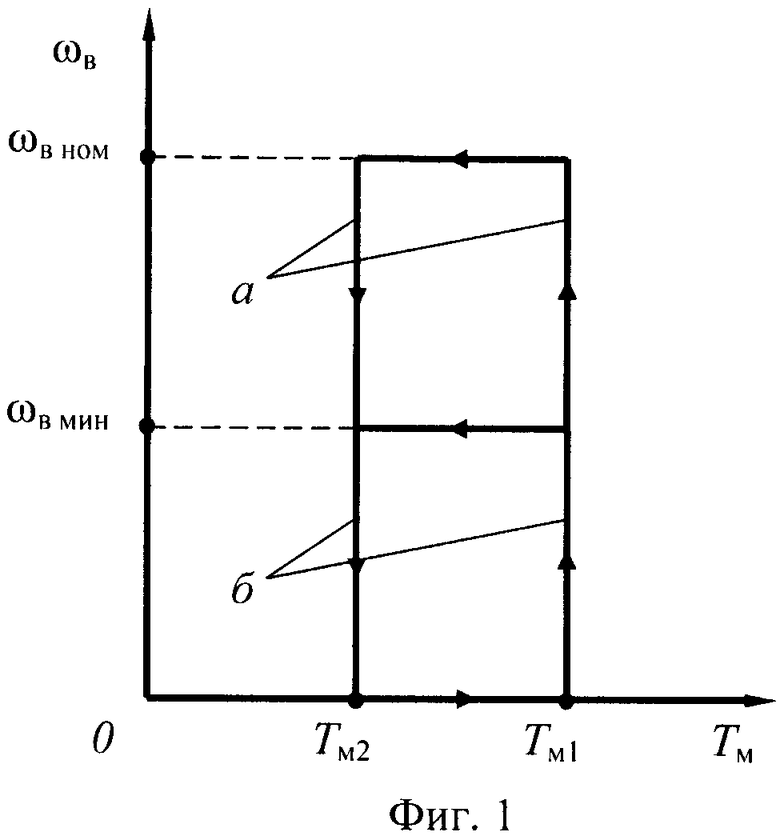
Регулирование температуры охлаждающих сред дизеля иногда осуществляется релейно путем включения и выключения вентилятора при срабатывании термореле. Статические характеристики автоматического релейного двухпозиционного регулятора температуры охлаждающих сред дизеля имеют вид петли и представлены на фиг.1. (Фиг.1. Статические характеристики автоматического релейного двухпозинионного регулятора температуры охлаждающих сред дизеля: а - при номинальной частоте вращения вала дизеля ωв ном; б - при минимальной частоте вращения вала дизеля ωв мин). Включения и выключения вентилятора приводят к колебаниям температуры охлаждающих сред дизеля со значительными амплитудами и к увеличенному расходу топлива дизелем, к уменьшению его ресурса и к увеличению вредных выбросов в атмосферу с выхлопными газами. Колебания температуры охлаждающих сред дизеля со значительными амплитудами приводят к уменьшению надежности радиаторов охлаждающего устройства и к увеличенным затратам энергии на привод вентилятора. При включении вентилятора из-за большого момента инерции вентиляторного колеса наблюдаются значительные динамические нагрузки в валопроводе, что приводит к значительному снижению надежности привода вентилятора.
Недостатки автоматического релейного регулятора температуры охлаждающих сред дизеля можно значительно уменьшить путем превращения его из двухпозиционного в многопозиционный. Чем больше позиций имеет релейный регулятор, тем больше релейная система с таким регулятором приближается к системе непрерывного действия но показателям качества работы.
В предлагаемом автоматическом релейном восьмипозиционном микропроцессорном регуляторе температуры тепловой машины в электрическом приводе вентилятора применен асинхронный полюсопереключаемый четырехскоростной двигатель с короткозамкнутым ротором, в котором статорная обмотка имеет полюсопереключаемые обмотки - число пар полюсов 8, 4, 2 и 1.
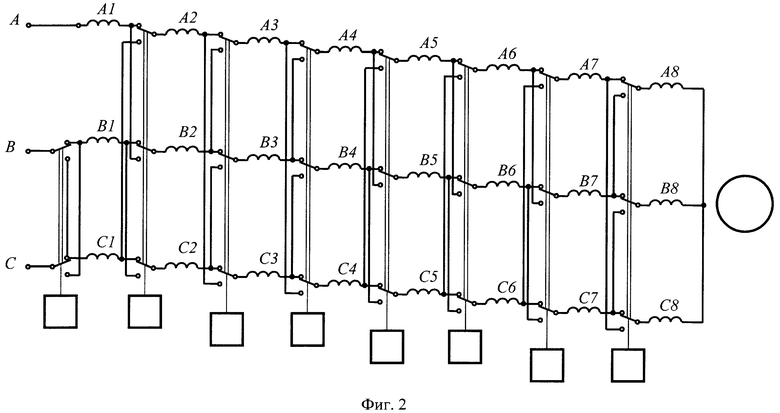
В этом асинхронном полюсопереключаемом двигателе трехфазная обмотка статора выполнена из 24 катушечных групп с выводами. Коммутационные переключатели катушечных групп (7 трехполюсных переключателей и 1 двухполюсный переключатель) соединяют катушечные группы так, что они образуют на расточке статора двигателя фазные зоны с целым числом катушек на зону (см. фиг.2. Принципиальная схема асинхронного полюсопереключаемого четырехскоростного двигателя с короткозамкнутым ротором с переключателями катушечных групп статорной обмотки).
При подаче трехфазного напряжения на входные зажимы обмотки последняя создает к воздушном зазоре магнитное поле, первая пространственная гармоника которого вращается в одном и том же направлении с частотой вращения, зависящей от числа пар полюсов. В зависимости от положения переключателей угловая скорость поля равна 375 об/мин при включении на 8 пар полюсов, 750 об/мин - при включении на 4 пары полюсов, 1500 об/мин - при включении па 2 пары полюсов и 3000 об/мин - при включении на одну пару полюсов. Таким образом, статорная обмотка обеспечивает ступенчатое изменение частоты вращения магнитного поля в отношении ω1:ω2:ω3:ω4 = 0,125; 0,250; 0,500 и 1.
Эта трехфазная полюсопереключаемая обмотка на четыре числа пар полюсов (двухслойная, трехзонная, соединенная в звезду с одной параллельной ветвью в каждой фазе при всех числах пар полюсов) состоит из одинаковых равномерно распределенных катушек, входящих в катушечные группы А1 - А8, В1 - В8, С1 - С8. При указанном на фиг.2 исходном положении переключателей схема подготовлена для включения обмотки на 8 пар полюсов (подвижные контакты переключателей катушечных групп расположены вверху), а включение двигателя производится подачей трехфазного напряжения па входные зажимы статорной обмотки, обозначенные буквами А, В и С.
В предлагаемом автоматическом комбинированном микропроцессорном регуляторе температуры тепловой машины электрический привод вентилятора имеет более высокую надежность, так как двигатель включается в работу только при первой минимальной частоте вращения вентиляторного колеса ωB=375 об/мин, то есть при 0,125 номинального значения. Это обуславливает пониженные динамические нагрузки в элементах привода. При такой частоте вращения вентиляторного колеса подача вентилятора GB составляет 0,125, вращающий момент на валу вентилятора составляет 0,0156, а мощность 0,00195 от номинальных значений. При числе пар полюсов двигателя, равном 4, обеспечивающем также пониженную частоту вращения вентиляторного колеса юв=750 об/мин, то есть 0,25 от номинального значения, наблюдаются пониженные динамические нагрузки в элементах привода. При такой частоте вращения вентиляторного колеса подача вентилятора GB составляет 0,25, вращающий момент на валу вентилятора составляет 0,0625, а мощность 0,0156 номинальных значений. При числе пар полюсов двигателя, равном 2, обеспечивающем также пониженную частоту вращения вентиляторного колеса Юв=1500 об/мин, то есть 0,50 от номинального значения, наблюдаются пониженные динамические нагрузки в элементах привода. При такой частоте вращения вентиляторного колеса подача вентилятора GB составляет 0,50, вращающий момент на валу вентилятора составляет 0,25, а мощность 0,125 номинальных значений.
Применение пониженных частот вращения вентилятора обеспечивает уменьшение времени пуска, пусковых токов, нагрева двигателя, затрат энергии на привод вентилятора и уменьшение амплитуды и частоты колебаний температуры тепловой машины Ты, что приводит к уменьшению расхода топлива тепловой машиной и к повышению надежности электропривода и радиаторов ее охлаждающего устройства.
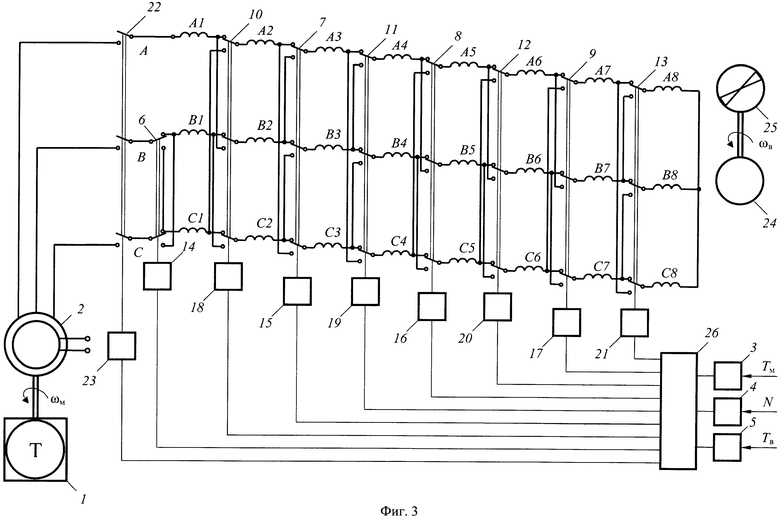
Автоматический комбинированный микропроцессорный регулятор температуры тепловой машины с электрическим приводом вентилятора (см. фиг.3. Принципиальная блок-схема автоматического комбинированного микропроцессорного регулятора температуры тепловой машины с электрическим приводом вентилятора) содержит датчики температуры тепловой машины (поз.1) Гм ДТМ 3, мощности тепловой машины NM ДМ 4, температуры наружного охлаждающего воздуха Гв ДТВ 5, синхронный генератор 2, асинхронный четырехскоростной двигатель с полюсопереключаемой статорной обмоткой, содержащей 24 катушечных группы: А1-А8, В1-В8 и CI-С8, соединенных с восемью переключателями 6-13, подвижные контактные группы которых имеют приводы 14-21, переключатель 22 включения двигателя с приводом 23, обмотку ротора 24 двигателя, вентилятор охлаждения 25, микропроцессорный контроллер МПК 26.
Любая автоматическая система (АС) содержит две основные функциональные части: объект регулирования (ОР) и автоматический регулятор (АР). Любой автоматический регулятор содержит две основные соединенные последовательно функциональные части: управляющий орган (УО) и исполнительно-регулирующее устройство (ИРУ). Управляющий орган содержит устройства: измерительное (ИУ) (датчик регулируемой величины), задающее (ЗУ), сравнивающее (СУ) и усилительное (УУ). В свою очередь исполнительно-регулирующее устройство содержит две соединенные последовательно функциональные части: исполнительный механизм (ИМ) и регулирующий орган (РО). В автоматических регуляторах температуры, содержащих в качестве регулирующего органа вентилятор, функции исполнительного механизма выполняет привод вентилятора [Луков Н.М. Основы автоматики и автоматизации тепловозов. - М.: Транспорт, 1989; Луков Н.М. Автоматическое регулирование температуры двигателей. - М.: Машиностроение, (1977), 1995; Луков Н.М., Космодамианский А.С. Автоматические системы управления локомотивов. - М.: ГОУ УМЦ по образованию на ж.-д. транспорте, 2007].
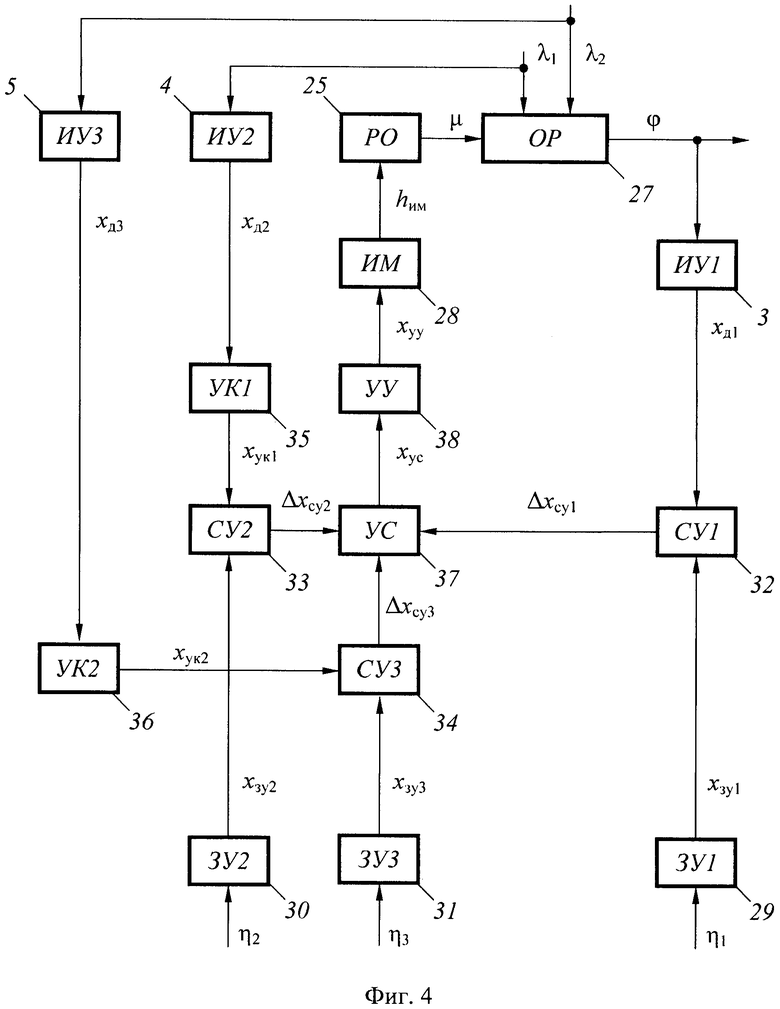
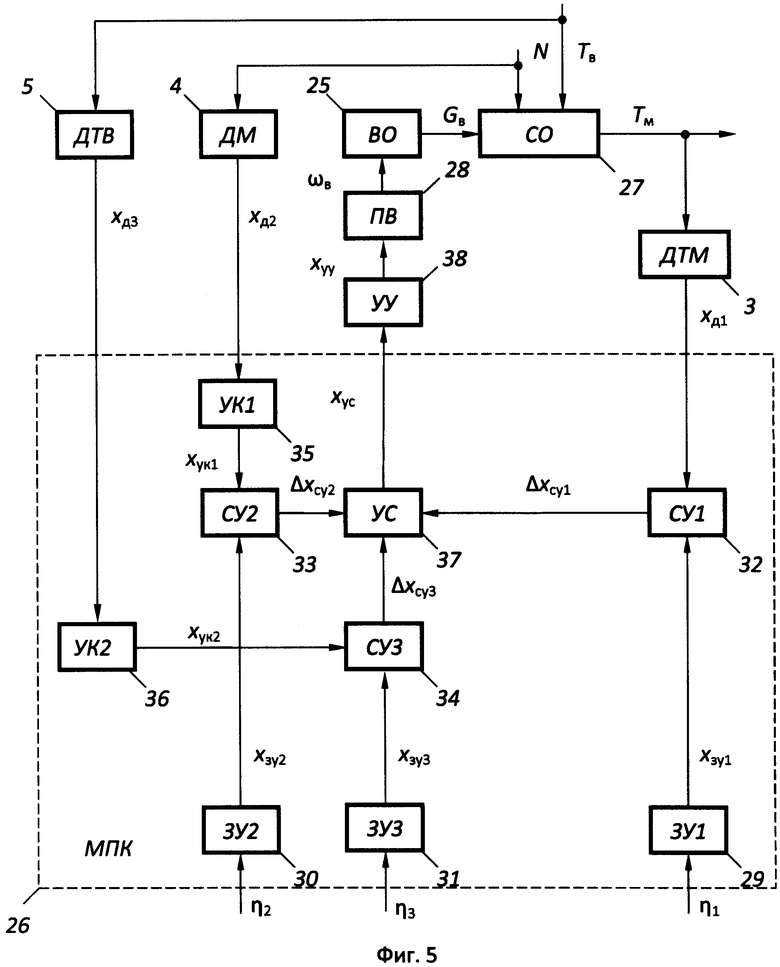
Автоматическая комбинированная микропроцессорная система регулирования температуры тепловой машины с электрическим приводом вентилятора, содержащая предлагаемый автоматический комбинированный микропроцессорный регулятор температуры тепловой машины с электрическим приводом вентилятора, содержит следующие функциональные элементы (см. фиг.4. Функциональная схема автоматической комбинированной микропроцессорной системы регулирования температуры тепловой машины с электрическим приводом вентилятора): объект регулирования температуры 27 тепловой машины ОР (систему охлаждения тепловой машины - СО), первое измерительное устройство 3 - ИУ1 (датчик температуры тепловой машины - ДТМ) с выходным сигналом хд1, второе измерительное устройство 4 - ИУ2 (датчик мощности тепловой машины - ДМ) с выходным сигналом хд2, третье измерительное устройство 5 - ИУ3 (датчик температуры охлаждающего воздуха - ДТВ) с выходным сигналом хд3, регулирующий орган РО - 25 (вентилятор охлаждения - ВО), исполнительный механизм 28 - ИМ (привод вентилятора - ПВ) с выходным сигналом hим, три задающих устройства 29, 30 и 31 - ЗУ1, ЗУ2 и ЗУ3 с сигналами задания η1, η2, η3, и с выходными сигналами хзу1, хзу2 и хзу3, три сравнивающих устройства 32, 33 и 34 - СУ1, СУ2 и СУ3, два устройства коррекции 35 и 36 - УК1 и УК2 статических характеристик измерительных устройств ИУ2 и ИУ3, выходные сигналы УК1 и УК2 - хук1 и хук2, устройство суммирования 37 - УС выходных сигналов Δхсу1, Δхсу2 и Δхсу3 сравнивающих устройств СУ1, СУ2 и СУ3, выходной сигнал УС - хус и управляющее устройство 38 - УУ с выходным сигналом хуу.
Устройства коррекции УК1 и УК2 статических характеристик измерительных устройств ИУ2 и ИУ3 предназначены для установления степени влияния сигналов возмущающих воздействий λ1 и λ2 на регулирующее воздействие µ. Степени влияния сигналов возмущающих воздействий λ1 и λ2 на регулирующее воздействие µ определяются значениями коэффициентов передачи устройств коррекции УК1 и УК2: kук1, kук2. Например, температура воды двигателя внутреннего сгорания при постоянной мощности изменяется пропорционально температуре охлаждающего воздуха, а коэффициент пропорциональности (коэффициент передачи системы охлаждения двигателя по температуре охлаждающего воздуха) равен единице [Луков Н.М. Автоматическое регулирование температуры двигателей. - М.: Машиностроение, 1995. стр.39]. Поэтому для уменьшения влияния температуры охлаждающего воздуха на регулирующее воздействие µ, а значит и на температуру воды двигателя, необходимо делать меньше единицы значение коэффициента передачи устройства коррекции УК2.
Выходной сигнал устройства суммирования УС определяется из выражения

Принципиальная блок-схема автоматической комбинированной микропроцессорной системы регулирования температуры тепловой машины с электрическим приводом вентилятора, содержащей предлагаемый автоматический комбинированный микропроцессорный регулятор температуры тепловой машины с электрическим приводом вентилятора, представлена па фиг.5 (Фиг.5. Принципиальная блок-схема автоматической комбинированной микропроцессорной системы регулирования температуры тепловой машины с электрическим приводом вентилятора).
Предлагаемый автоматический микропроцессорный восьмипозиционный регулятор температуры тепловой машины с электрическим приводом вентилятора является комбинированным, так как в нем для управления исполнительно-регулирующим устройством кроме сигнала регулируемой температуры φ-Тм используются еще сигналы внешних возмущающих воздействий λ1 и λ2: мощности тепловой машины N и температуры охлаждающего воздуха Тм. В результате регулирующее воздействие µ на объект регулирования определяется выражением (алгоритмом работы комбинированного регулятора температуры) [Луков П.М. Основы автоматики и автоматизации тепловозов. - М.: Транспорт, 1989, стр.19. Луков Н.М., А.С. Космодамианский. Автоматические системы управления локомотивов. - М.: ГОУ УМЦ по образованию на ж.-д. транспорте, стр.22]

где kp, kpλ1, kpλ2 - коэффициенты передачи регулятора по каналам действия регулируемой величины (температуры Тм тепловой машины) и возмущающих воздействий (мощности тепловой машины N и температуры охлаждающего воздуха Тв). Автоматический комбинированный микропроцессорный регулятор температуры тепловой машины с электрическим приводом вентилятора содержит три регулятора (фиг.4). Регулятор температуры 7^ тепловой машины по ее отклонению от заданного значения вместе с объектом регулирования образует замкнутый контур регулирования и содержит функциональные элементы: ИУ1, СУ1, ЗУ1, УС, УУ, ИМ И РО. Регулятор температуры Тм тепловой машины по мощности тепловой машины вместе с объектом регулирования образует разомкнутый контур регулирования и содержит функциональные элементы: ИУ2, УК1, СУ 2, ЗУ 2, УС, УУ, ИМ И РО. Регулятор температуры Тм тепловой машины по температуре охлаждающего воздуха вместе с объектом регулирования образует разомкнутый контур регулирования и содержит функциональные элементы: ИУЗ, УК2, СУЗ, ЗУЗ, УС, УУ, ИМ И РО.
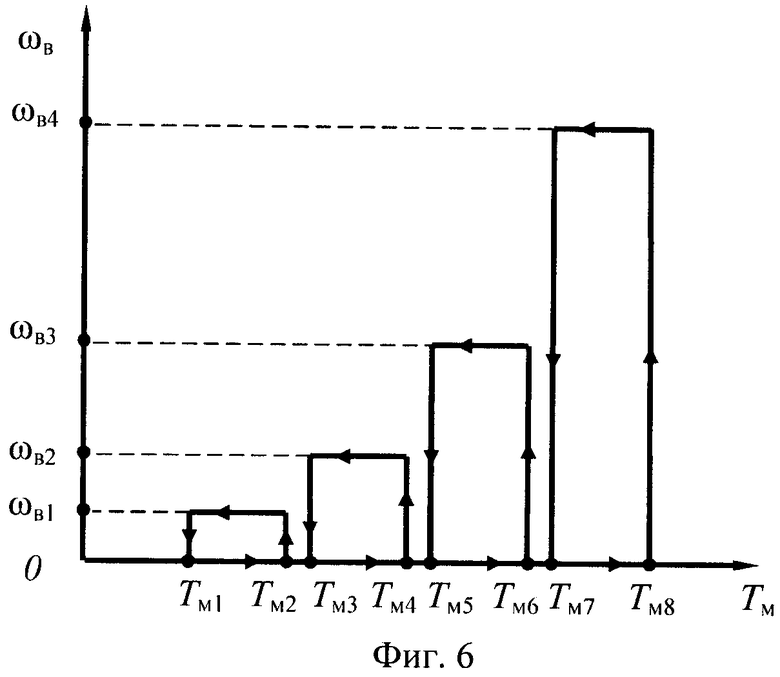
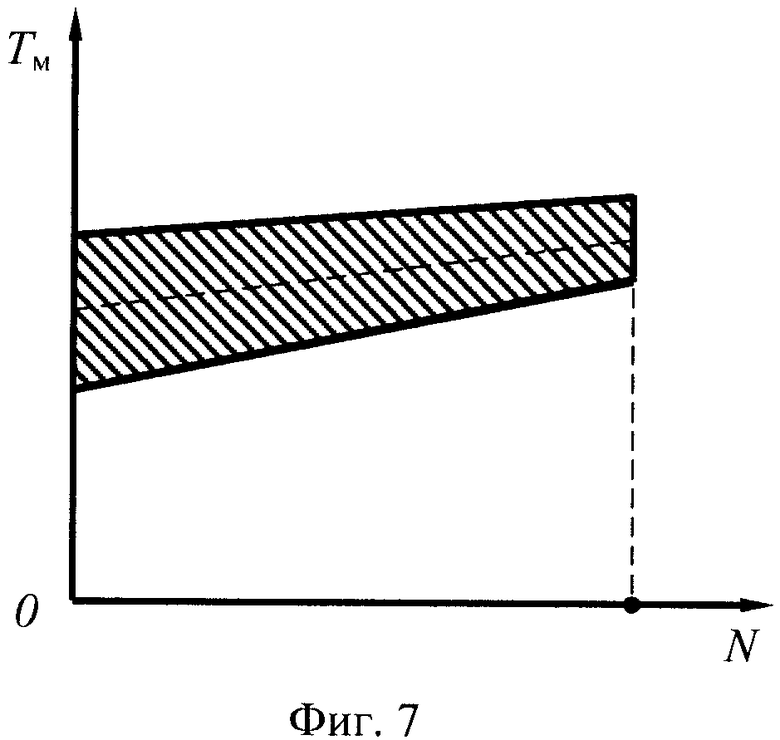
Автоматический комбинированный микропроцессорный регулятор температуры тепловой машины с электрическим приводом вентилятора работает следующим образом. При отключенных датчиках 4 и 5 мощности N тепловой машины и температуры Тв охлаждающего воздуха микропроцессорный контроллер 26 обеспечивает включение (при повышении температуры тепловой машины Тм до значений: Тм2, Тм4, Тм6 и Тм3) или выключение (при понижении температуры тепловой машины Тм до значений: Тм1, Тм3, Тм5 и Тм7) соответствующих катушечных групп статорной обмотки двигателя. В результате автоматический микропроцессорный восьмипозиционный релейный регулятор температуры тепловой машины с электрическим приводом вентилятора имеет статические характеристики, представленные на фиг.6 (Фиг.6. Статические характеристики автоматического микропроцессорного регулятора температуры тепловой машины с электрическим приводом вентилятора). При таком регуляторе температуры поле статических характеристик автоматической микропроцессорной системы регулирования температуры тепловой машины с электрическим приводом вентилятора будет иметь вид, представленный на фиг.7 (Фиг.7. Поле статических характеристик автоматическоймикропроцессорной системы регулирования температурытепловой машины с электрическим приводом вентилятора). На фиг.7 видно, что при уменьшении мощности тепловой машины N амплитуда и размах колебаний температуры тепловой машины Тм, увеличиваются. При этом также увеличивается период колебаний температуры. Это обусловлено тем, что при уменьшении мощности тепловой машины N увеличиваются постоянная времени и коэффициент передачи системы охлаждения тепловой машины [Попов Е.П. Автоматическое регулирование и управление. - М.: Наука, 1966, стр.309-311. В.С. Прусенко. Пневматические системы автоматического регулирования технологических процессов. - М.: Машиностроение, 1987, стр.180-181]. Увеличение амплитуды и периода колебаний температуры отрицательно сказывается на технико-экономических показателях тепловой машины.
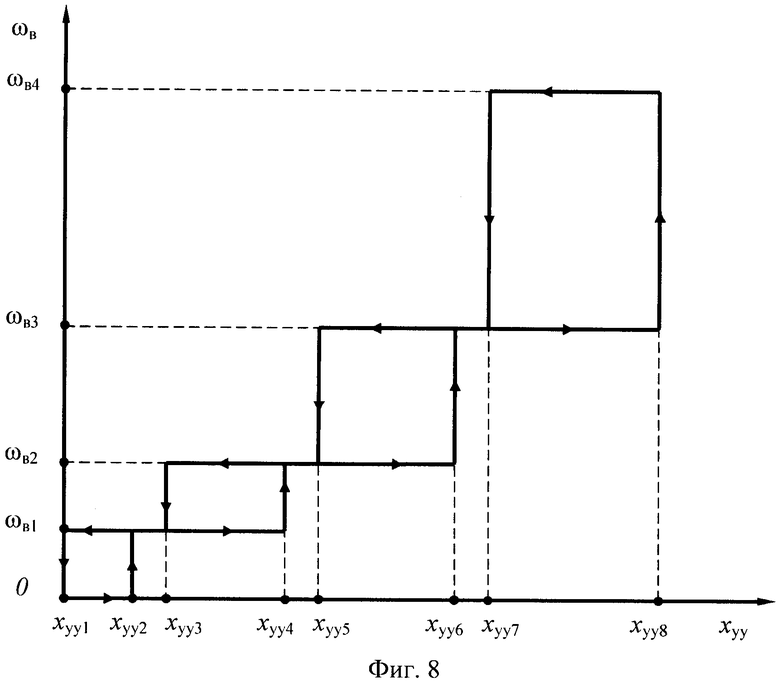
При включенных датчиках 4 и 5 мощности тепловой машины N и температуры охлаждающего воздуха Тв микропроцессорный контроллер 26 - МПК обеспечивает включение (при повышении температуры тепловой машины Тм) или выключение (при понижении температуры тепловой машины Тм) соответствующих катушечных групп статорной обмотки двигателя. Однако, при действии сигналов по мощности тепловой машины N и температуре охлаждающего воздуха Тв микропроцессорный контроллер 26 в соответствии с программой, заложенной в устройство управления УУ (фиг.4 и 5), обеспечивает включение и выключение соответствующих катушечных групп статорной обмотки двигателя не только в зависимости от сигнала температуры тепловой машины Тм, но и от сигналов по мощности тепловой машины N и температуре охлаждающего воздуха Гц, и автоматический комбинированный релейный восьмипозиционный микропроцессорный регулятор температуры тепловой машины с электрическим приводом вентилятора имеет статические характеристики, представленные на фиг.8 (Фиг.8. Статические характеристики автоматического комбинированного микропроцессорного регулятора температуры тепловой машины с приводом вентилятора), отличные от характеристик, приведенных на фиг.6. При этом алгоритм (закон) работы устройства управления УУ приводом вентилятора ПВ имеет вид:
ωв=ωв4 при хуу8<хуу<хуу7 - контактные группы всех переключателей находятся в нижнем положении;
ωв=ωв3 при хуу6<хуу<хуу5 - контактные группы переключателя 3 находятся в верхнем положении, а переключателей 1 и 2, 4 - 8 - в нижнем положении;
ωв=ωв2 при хуу4<хуу<хуу3 - контактные группы переключателей 1-4 находятся в верхнем положении, а контактные группы переключателей 5-8 находятся в нижнем положении;
ωв=ωв1 при хуу2<хуу<хуу1 - контактные группы всех переключателей находятся в верхнем положении.
Эти переключения катушечных групп статорной обмотки двигателя производятся в соответствии с таблицей 1.
В данной таблице обозначено:
В - подвижные контактные группы переключателей расположены вверху;
Н - подвижные контактные группы переключателей расположены внизу.
Как видно из таблицы для перевода двигателя с первой ступени частоты вращения (р=8) на вторую ступень (р=4) переключаются переключатели 5-8; для перевода двигателя со второй ступени частоты вращения на третью ступень (р=2) переключаются переключатели 1, 2 и 4; а для перевода двигателя с третьей ступени частоты вращения на четвертую ступень (р=1) переключается переключатель 3. При переключении катушечных групп и изменении числа пар полюсов не происходит разрыва потока мощности на привод вентилятора [Винокуров В.А., Попов Д.А. Электрические машины железнодорожного транспорта. - М.: Транспорт, 1986, с.369-372].
В предлагаемом автоматическом микропроцессорном восьмипозиционном регуляторе температуры тепловой машины применен более простой, более надежный и более дешевый электрический привод вентилятора, чем в известных регуляторах температуры. В нем применен асинхронный двигатель с короткозамкнутым ротором (вместо двигателей с фазным ротором) и в нем не применяется преобразователь частоты.
Для того, чтобы при уменьшении мощности тепловой машины N и температуры охлаждающего воздуха Тв не увеличивалась амплитуда колебаний температуры тепловой машины Тм зона нечувствительности устройства управления УУ, а значит и регулятора температуры, уменьшается при уменьшении частоты вращения ωв вентилятора охлаждения ВО. Зона нечувствительности устройства управления УУ: при ωв=ωв1 2ΔZнч1=хуу2-хуу1, при ωв=ωв2 2ΔZнч2=хуу4-хуу3, при ωв=ωв3 2ΔZнч=хуу6-хуу5 и при ωв=ωв4 2ΔZнч3=хуу8-хуу7. Соотношение зон нечувствительности: ΔZнч1=rz1ΔZнч2; ΔZнч2=rz2ΔZнч3; kz1>kz2>1. Значения зоны нечувствительности ΔZнч1 и коэффициентов kz1 и kz2 являются статическими параметрами настройки регулятора. Интервалы хуу3-хуу2, Xyy5-Хуу4 и Хуу7-хуу6 составляют 0,1-0,2 от зоны нечувствительности.
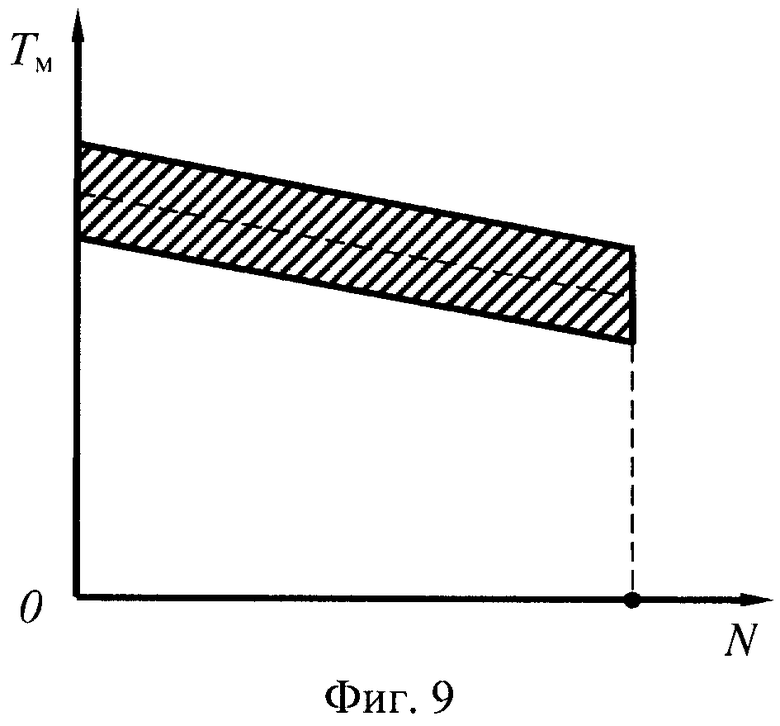
В результате поле характеристик автоматической комбинированной микропроцессорной системы регулирования температуры тепловой машины, содержащей автоматический комбинированный релейный восьмипозиционный микропроцессорный регулятор температуры тепловой машины с электрическим приводом вентилятора, будет иметь вид, представленный на фиг.9 (Фиг.9. Поле характеристик автоматической комбинированной микропроцессорной системы регулирования температуры тепловой машины с электрическим приводом вентилятора). На фиг.9 видно, что при уменьшении мощности тепловой машины N температуры тепловой машины Тм увеличиваются, что обеспечивает уменьшение расхода топлива тепловой машиной [Луков Н.М. Автоматическое регулирование температуры двигателей. - М.: Машиностроение, 1995, стр.9-11].
Технический результат, который может быть получен при осуществлении предполагаемого изобретения
Осуществление предполагаемого изобретения позволит повысить надежность и уменьшить стоимость электрического привода вентилятора охлаждения, повысить надежность радиаторов и тепловой машины, уменьшить расход топлива тепловой машиной. Технический результат достигается за счет того, что автоматический комбинированный микропроцессорный регулятор температуры тепловой машины с электрическим приводом вентилятора, содержащий датчик температуры тепловой машины, вал которой соединен с валом синхронного генератора, вентилятор охлаждения, вал которого соединен с валом асинхронного двигателя, причем в регуляторе применен асинхронный двигатель четырехскоростной с короткозамкнутым ротором, с полюсопереключаемой статорной обмоткой, содержащей 24 катушечных группы, соединенные с восемью переключателями катушечных групп и переключателем соединения двигателя со статорной обмоткой синхронного генератора, подвижные контактные группы которых имеют приводы, образующие управляющее устройство; регулятор содержит датчик температуры тепловой машины, датчик мощности тепловой машины и датчик температуры охлаждающего воздуха, причем датчик температуры тепловой машины подключен к первому сравнивающему устройству, датчик мощности тепловой машины и датчик температуры охлаждающего воздуха связаны со вторым и третьим сравнивающим устройствам посредством первого и второго устройств коррекции статических характеристик датчиков; первое, второе и третье сравнивающие устройства связаны соответственно с первым, вторым и третьим задающим устройствам и с устройством суммирования, подключенном в свою очередь к управляющему устройству привода вентилятора, в программу работы которого заложен алгоритм работы автоматического комбинированного микропроцессорного регулятора температуры.
Перечень фигур
Фиг.1. Статические характеристики автоматического релейного двухпозиционного регулятора температуры охлаждающих сред дизеля: а - при номинальной частоте вращения; б - при минимальной частоте вращения вала дизеля.
Фиг.2. Принципиальная схема асинхронного полюсопереключаемого четырехскоростного двигателя с короткозамкнутым ротором с переключателями катушечных групп статорной обмотки.
Фиг.3. Принципиальная блок-схема автоматического комбинированного микропроцессорного регулятора температуры тепловой машины с электрическим приводом вентилятора.
Фиг.4. Функциональная схема автоматической комбинированной микропроцессорной системы регулирования температуры тепловой машины с электрическим приводом вентилятора.
Фиг.5. Принципиальная блок-схема автоматической комбинированной микропроцессорной системы регулирования температуры тепловой машины с электрическим приводом вентилятора.
Фиг.6. Статические характеристики автоматического микропроцессорного регулятора температуры тепловой машины с электрическим приводом вентилятора.
Фиг.7. Поле статических характеристик автоматической микропроцессорной системы регулирования температуры тепловой машины с электрическим приводом вентилятора.
Фиг.8. Статические характеристики автоматического комбинированного микропроцессорного регулятора температуры тепловой машины с приводом вентилятора.
Фиг.9. Поле характеристик автоматической комбинированной микропроцессорной системы регулирования температуры тепловой машины с электрическим приводом вентилятора.
Перечень позиций, соответствующих на рисунках основным элементам автоматического комбинированного микропроцессорного регулятора температуры тепловой машины с электрическим приводом вентилятора
Фиг.3, 4 и 5:
1 - тепловая машина;
2 - синхронный генератор;
3 - датчик температуры тепловой машины;
4 - датчик мощности тепловой машины;
5 - датчик температуры наружного охлаждающего воздуха;
6÷13 - переключатели асинхронного двигателя с полюсопереключаемой статорной обмоткой;
14÷21 - приводы подвижных контактных групп асинхронного двигателя;
22 - переключатель включения асинхронного двигателя;
23 - привод переключателя включения асинхронного двигателя;
24 - ротор асинхронного двигателя;
25 - вентилятор охлаждения;
26 - микропроцессорный контроллер;
27 - объект регулирования температуры;
28 - исполнительный механизм;
29÷31 - задающие устройства;
32÷34 - сравнивающие устройства;
35 и 36 - устройства коррекции;
37 - устройство суммирования выходных сигналов сравнивающих устройств;
38 - управляющее устройство
Перечень условных сокращений
АСР - автоматическая система регулирования
ОР - объект регулирования
АР - автоматический регулятор
УО - управляющий орган
ИРУ - исполнительно-регулирующее устройство
ИУ, ИУ1, ИУ2 и ИУ3 - измерительное устройство
ЗУ, ЗУ1, ЗУ2 и ЗУ3 - задающее устройство
УУ - управляющее устройство
УК1 и УК2 - устройства коррекции
СУ, СУ1, СУ2 и СУ3 - сравнивающее устройство
ИМ - исполнительный механизм
РО - регулирующий орган
ДТМ - датчик температуры тепловой машины
ДМ - датчик мощности тепловой машины
ДТВ - датчик температуры наружного охлаждающего воздуха
МПК - микропроцессорный контроллер
ВО - вентилятор охлаждения
ПВ - привод вентилятора
Перечень обозначений величин
Gв - подача вентилятора
ωм - частота вращения вала тепловой машины
ωk - частота вращения выходного вала планетарной коробки перемены передач
ωв - частота вращения вала вентиляторного колеса
ωв ном - номинальная частота вращения вала вентиляторного колеса
ωв мин - минимальная частота вращения вала вентиляторного колеса
Тм - температура тепловой машины
Тв - температура наружного охлаждающего воздуха
N - мощность тепловой машины
хд1 - выходной сигнал датчика температуры тепловой машины (первого измерительного устройства)
хд2 - выходной сигнал датчика мощности тепловой машины (второго измерительного устройства)
хд3 - выходной сигнал датчика температуры наружного охлаждающего воздуха (третьего измерительного устройства)
hим - выходной сигнал исполнительного механизма (привода вентилятора)
η1, η2 и η3 - сигналы задания
хзу1, хзу2 и хзу3 - выходные сигналы задающих устройств
хук1 и хук2 - выходные сигналы устройств коррекции
Δхсу1, Δхсу2 и Δхсу3 - выходные сигналы сравнивающих устройств
хус - выходной сигнал устройства суммирования выходных сигналов сравнивающих устройств
хуу - выходной сигнал управляющего устройства
λ1 и λ2 - возмущающие воздействия
µ - регулирующее воздействие
kук1 и kук2 - коэффициенты передачи устройств коррекции
φ - сигнал регулируемой величины (температуры тепловой машины)
kp, kpλ1 и kpλ2 - коэффициенты передачи регулятора по каналам действия регулируемой величины и возмущающих воздействий
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКИЙ КОМБИНИРОВАННЫЙ МИКРОПРОЦЕССОРНЫЙ РЕГУЛЯТОР ТЕМПЕРАТУРЫ ТЕПЛОВОЙ МАШИНЫ С ЭЛЕКТРИЧЕСКИМ ПРИВОДОМ ВЕНТИЛЯТОРА | 2011 |
|
RU2503558C2 |
| АВТОМАТИЧЕСКИЙ КОМБИНИРОВАННЫЙ МИКРОПРОЦЕССОРНЫЙ РЕГУЛЯТОР ТЕМПЕРАТУРЫ ТЕПЛОВОЙ МАШИНЫ С МЕХАНИЧЕСКИМ ПРИВОДОМ ВЕНТИЛЯТОРА | 2011 |
|
RU2492335C2 |
| АВТОМАТИЧЕСКИЙ КОМБИНИРОВАННЫЙ МИКРОПРОЦЕССОРНЫЙ РЕГУЛЯТОР ТЕМПЕРАТУРЫ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2369752C2 |
| АВТОМАТИЧЕСКАЯ КОМБИНИРОВАННАЯ МИКРОПРОЦЕССОРНАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ СГЛАЖИВАЮЩЕГО РЕАКТОРА ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2406622C2 |
| АВТОМАТИЧЕСКИЙ КОМБИНИРОВАННЫЙ МИКРОПРОЦЕССОРНЫЙ РЕГУЛЯТОР ТЕМПЕРАТУРЫ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2426895C1 |
| ЭЛЕКТРИЧЕСКАЯ ПЕРЕДАЧА МОЩНОСТИ ПЕРЕМЕННОГО ТОКА ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА С МИКРОПРОЦЕССОРНОЙ СИСТЕМОЙ УПРАВЛЕНИЯ | 2013 |
|
RU2554911C2 |
| Автоматическая микропроцессорная система регулирования температуры энергетической установки транспортного средства | 2016 |
|
RU2645519C1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ ОБМОТОК ТЯГОВЫХ ЭЛЕКТРИЧЕСКИХ МАШИН С ЭЛЕКТРИЧЕСКИМ НА ПЕРЕМЕННОМ ТОКЕ ПРИВОДОМ ВЕНТИЛЯТОРА | 2003 |
|
RU2256996C1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ ОХЛАЖДАЮЩЕЙ СРЕДЫ ТЕПЛОВОЙ МАШИНЫ | 2003 |
|
RU2264544C2 |
| АВТОМАТИЧЕСКИЯ СИСТЕМА ЭКСТРЕМАЛЬНОГО РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ НАДДУВОЧНОГО ВОЗДУХА ТЕПЛОВОЙ МАШИНЫ | 2007 |
|
RU2349770C1 |
Изобретение относится к автоматическому комбинированному микропроцессорному регулятору температуры тепловой машины с электрическим приводом вентилятора. Регулятор содержит датчик температуры тепловой машины, датчик мощности тепловой машины и датчик температуры охлаждающего воздуха, вентилятор охлаждения, управляющее устройство привода вентилятора. Вал тепловой машины соединен с валом синхронного генератора. Вал вентилятора охлаждения соединен с валом четырехскоростного асинхронного двигателя с короткозамкнутым ротором и с полюсопереключаемой статорной обмоткой. Статорная обмотка содержит 24 катушечных группы. Катушечные группы соединены с восемью переключателями катушечных групп и переключателем соединения двигателя со статорной обмоткой синхронного генератора. Датчик температуры тепловой машины подключен к первому сравнивающему устройству. Датчик мощности тепловой машины и датчик температуры охлаждающего воздуха связаны со вторым и третьим сравнивающими устройствами посредством первого и второго устройств коррекции статических характеристик датчиков. Первое, второе и третье сравнивающие устройства связаны соответственно с первым, вторым и третьим задающими устройствами и с устройством суммирования. Устройство суммирования подключено к управляющему устройству привода вентилятора. Технический результат заключается в повышении надежности электропривода системы регулирования температуры. 1 табл., 9 ил.
Автоматический комбинированный микропроцессорный регулятор температуры тепловой машины с электрическим приводом вентилятора, содержащий датчик температуры тепловой машины, вал которой соединен с валом синхронного генератора, вентилятор охлаждения, вал которого соединен с валом асинхронного двигателя, отличающийся тем, что в нем применен асинхронный двигатель четырехскоростной с короткозамкнутым ротором с полюсопереключаемой статорной обмоткой, содержащей 24 катушечных группы, соединенные с восемью переключателями катушечных групп и переключателем соединения двигателя со статорной обмоткой синхронного генератора, подвижные контактные группы которых имеют приводы, образующие управляющее устройство, регулятор содержит датчик температуры тепловой машины, датчик мощности тепловой машины и датчик температуры охлаждающего воздуха, причем датчик температуры тепловой машины подключен к первому сравнивающему устройству, датчик мощности тепловой машины и датчик температуры охлаждающего воздуха связаны со вторым и третьим сравнивающими устройствами посредством первого и второго устройств коррекции статических характеристик датчиков, первое, второе и третье сравнивающие устройства связаны соответственно с первым, вторым и третьим задающими устройствами и с устройством суммирования, подключенным, в свою очередь, к управляющему устройству привода вентилятора.
| СИСТЕМА УПРАВЛЕНИЯ АППАРАТАМИ ВОЗДУШНОГО ОХЛАЖДЕНИЯ | 2009 |
|
RU2397372C1 |
| АВТОМАТИЧЕСКАЯ МИКРОПРОЦЕССОРНАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ ТЕПЛОНОСИТЕЛЕЙ ТЕПЛОВОЙ МАШИНЫ | 2004 |
|
RU2285135C2 |
| ТРЕХФАЗНАЯ ПОЛЮСОПЕРЕКЛЮЧАЕМАЯ ОБМОТКА | 1990 |
|
RU2014711C1 |
| US 2006124081 A1, 15.06.2006. | |||

