Устройство гибкой передачи механических усилий предназначено для работы в системах управления машинами. Настоящее изобретение относится к области механики. Оно может быть использовано в малогабаритных механизмах, дистанционных устройствах, где требуется надежная фиксация оболочки троса, герметичность соединения оболочки с корпусом механизма и эстетический вид изделия.
Ближайшими аналогами являются дистанционный привод управления замка капота автомобиля, управление воздушной и дроссельной заслонкой карбюратора двигателя.
Анализ работы существующих устройств гибкой передачи механических усилий показывает на ряд недостатков, одними из которых являются применение зажимов, фиксаторов и регулирующих элементов для обеспечения натяжения троса, что снижает надежность фиксации оболочки троса и эстетический вид устройства в целом, а также затрудняет применение устройств в малогабаритных механизмах.
Задачей изобретения является упрощение конструкции, уменьшение габаритов, повышение надежности и герметичности фиксации оболочки на корпусе механизма, возможность регулировки натяжения троса без применения дополнительных элементов натяжения и фиксации, снижение трудоемкости при изменении длины оболочки в механизмах, где не предусмотрена ее конкретная длина, получение требуемого эстетического вида изделия.
Поставленная задача достигается тем, что в конструкции применены серийно выпускаемые детали и материалы, а именно в качестве оболочки используется антифрикционная трубка из полиэтилена низкого давления, которая обладает высокими техническими характеристиками, такими как высокая износостойкость, достаточная гибкость, возможность воспринимать сжимающие и растягивающие усилия, хорошая технологичность при сборке устройства и резьбовой заклепкой, зафиксированной на корпусе механизма, в которую вворачивается оболочка методом самонарезания на ней резьбы.
Техническим результатом является разработка устройства гибкого механического привода, позволяющего обеспечить натяжение троса регулировкой длины направляющей оболочки без дополнительных элементов, а также повышение надежности фиксации продольного, поперечного перемещения и угла ввода направляющей оболочки в механизм, обеспечение герметичности устройства, требуемого эстетического вида, снижение себестоимости затрат при производстве, исключая применение дополнительного оборудования и оснастки.
Указанный технический результат достигается путем применения устройства гибкой передачи механических усилий, состоящего из оболочки, выполненной из антифрикционного материала, двух резьбовых заклепок и троса. Особенностью устройства является то, что одна резьбовая заклепка неподвижно закреплена на корпусе механизма, в которую вворачивается оболочка без предварительного нарезания на ней резьбы, вторая резьбовая заклепка на другом корпусе механизма, в которую ввернут таким же образом другой конец оболочки, установлена с возможностью поворачиваться вокруг своей оси так, что, вращая оболочку в первой резьбовой заклепке или вращая вторую резьбовую заклепку относительно оболочки, изменяется длина оболочки между корпусами механизмов, в результате происходит натяжение троса, чем достигается упрощение конструкции, уменьшение габаритов, надежная фиксация оболочки и образование самоконтрящихся узлов.
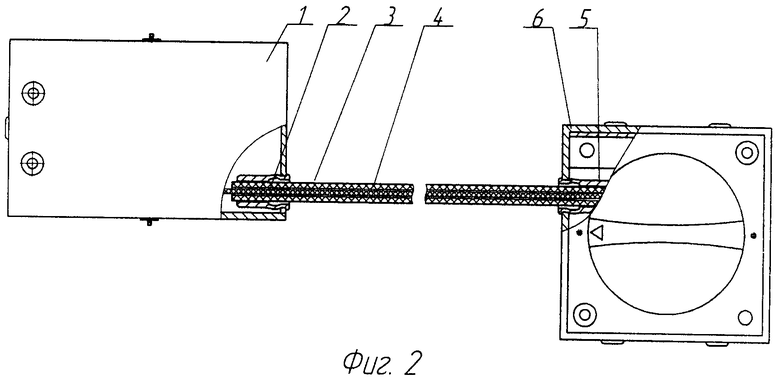
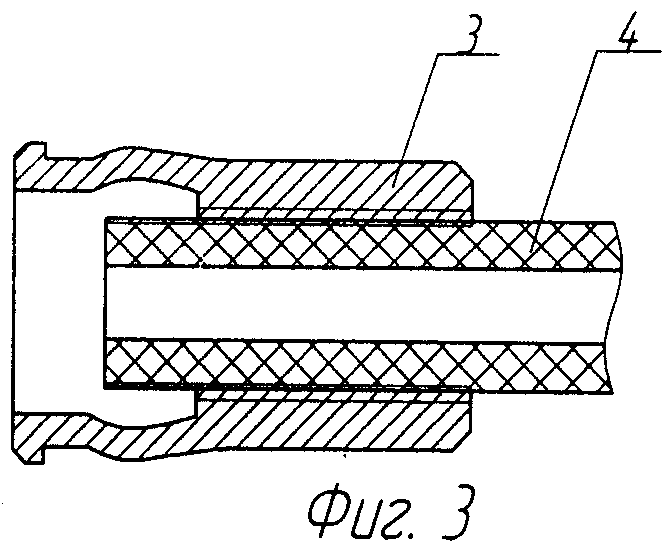
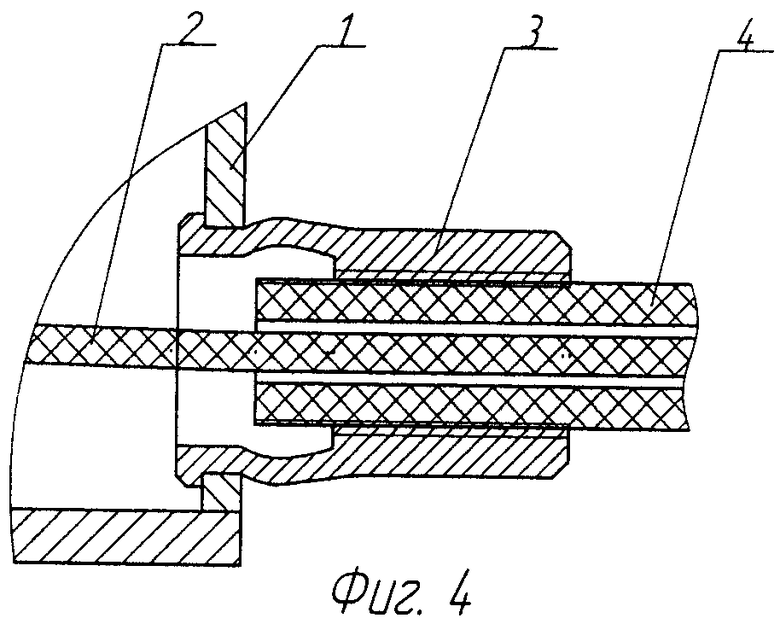
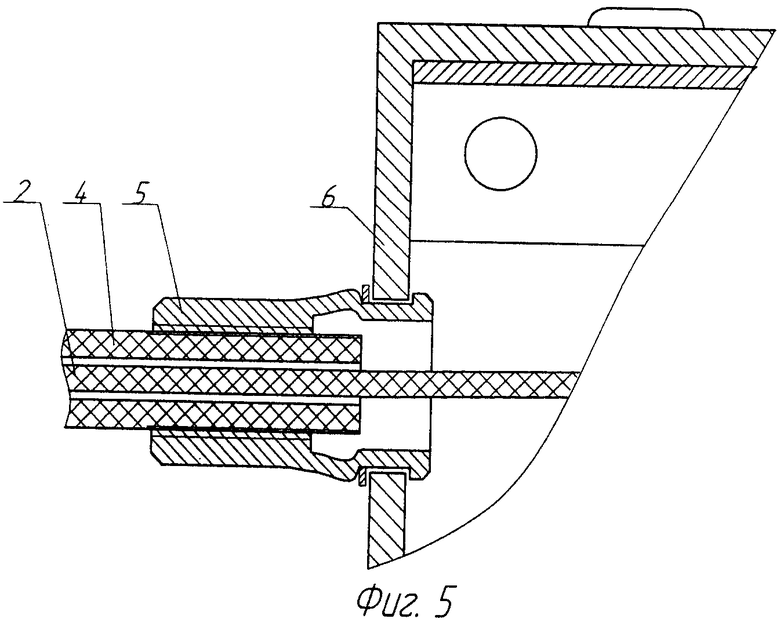
Сущность изобретения поясняется чертежами, где на фиг.1 изображено устройство гибкой передачи механических усилий, на котором резьбовые заклепки установлены с наружи корпусов, на фиг.2 - устройство гибкой передачи механических усилий, на котором резьбовые заклепки установлены внутри корпусов, на фиг.3 - самоконтрящийся узел, на фиг.4 - резьбовая заклепка установленная неподвижно, на фиг.5 - резьбовая заклепка с возможностью вращения в корпусе механизма.
На фиг.1 показан чертеж устройства гибкой передачи механических усилий, установленного на корпусе механизма (1) и (6), состоящее из оболочки (4), резьбовой заклепки (3) и (5), троса (2).
Устройство гибкой передачи механических усилий, состоящее из оболочки (4), выполненной из антифрикционного материала, двух резьбовых заклепок (3) и (5) и троса (2), отличается тем, что одна резьбовая заклепка (3) неподвижно закреплена на корпусе механизма (1), в которую вворачивается оболочка (4) без предварительного нарезания на ней резьбы, вторая резьбовая заклепка (5) на другом корпусе механизма (6), в которую ввернут таким же образом другой конец оболочки (4), установлена с возможностью поворачиваться вокруг своей оси так, что, вращая оболочку (4) в первой резьбовой заклепке (3) или вращая вторую резьбовую заклепку (5) относительно оболочки (4), изменяется длина оболочки между корпусами механизмов (1) и (6), в результате происходит натяжение троса (2), чем достигается упрощение конструкции, уменьшение габаритов, надежная фиксация оболочки и образование самоконтрящихся узлов.
Устройство работает следующим образом. Устройство гибкой передачи механических усилий соединяет механизмы (1) и (6) фиг.1
Резьбовая заклепка (3) фиг.4 неподвижно закреплена на корпусе (1) механизма, в нее вворачивается методом самонарезания резьбы один конец оболочки (4), вторая резьбовая заклепка (5) фиг.5 установлена на другом корпусе (6) механизма, с возможностью поворачивать ее вокруг своей оси, в нее тем же способом ввернут другой конец оболочки (4). Внутри оболочки расположен трос (2). Вращая оболочку (4) фиг.4 в неподвижно закрепленной резьбовой заклепки (3) корпуса (1) механизма или вращая резьбовую заклепку (5) фиг.5 в корпусе (6) механизма происходит изменение длины оболочки (4) между корпусами механизмов (1) и (6), фиг.1 в результате чего изменяется натяжение троса (2).
Испытания устройств дистанционного управления с гибкой передачей механических усилий с использованием серийно выпускаемых: антифрикционной трубки из полиэтилена низкого давления, выполненной по ТУ 6-05-1609-77 с внешним диаметром 5,5 мм, внутренней 2,3 мм и резьбовых заклепок с внутренней резьбой М6, показал технологичность сборки, простоту регулировки, хорошую герметичность, надежную фиксацию оболочки с возможностью воспринимать растягивающие и сжимающие усилия между корпусами механизмов, хороший эстетический вид. Усилие фиксации в резьбовом соединении самоконтрящегося узла фиг.3 оболочки составляет не менее 35 кг и не требует дополнительной фиксации оболочки. Снижена трудоемкость при монтаже оболочки в механизмах, где не предусмотрена конкретная ее длина. Обеспечивается низкая себестоимость изделия как в единичном, так и в массовом производстве, в результате применения серийно выпускаемых заклепок и антифрикционной трубки и не требует специального оборудования и оснастки при изготовлении и монтаже.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕССАЛЬНИКОВЫЙ КЛАПАН С МЕХАНИЧЕСКИМ ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 2009 |
|
RU2395744C1 |
| БЕССАЛЬНИКОВЫЙ КЛАПАН С МЕХАНИЧЕСКИМ ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 2010 |
|
RU2436005C1 |
| ЗАПОРНО-ПЛОМБИРОВОЧНОЕ УСТРОЙСТВО | 2008 |
|
RU2386771C2 |
| МАГНИТНЫЙ ФИКСАТОР | 2010 |
|
RU2425204C1 |
| ЗАПОРНО-ПЛОМБИРОВОЧНОЕ УСТРОЙСТВО | 2008 |
|
RU2350801C1 |
| Самоконтрящийся резьбовой элемент | 1978 |
|
SU734444A1 |
| СЕГМЕНТНЫЙ РАДИАЛЬНЫЙ ПОДШИПНИК СКОЛЬЖЕНИЯ | 2010 |
|
RU2474737C2 |
| СПОСОБ ПОВЫШЕНИЯ НАДЁЖНОСТИ МНОГОСЕКЦИОННОЙ МНОГОКАНАЛЬНОЙ ПРОТЯЖЁННОЙ СЕЙСМОПРИЁМНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2021 |
|
RU2767458C1 |
| СПОСОБ СБОРКИ БАЛЛОНА, РАБОТАЮЩЕГО ПОД ДАВЛЕНИЕМ | 2006 |
|
RU2305223C1 |
| УСТРОЙСТВО ДЛЯ УСТАНОВКИ ЗАКРЫВАЮЩЕЙ СИСТЕМЫ ДЛЯ ГАЗОПРОВОДОВ, НАХОДЯЩИХСЯ ПОД ДАВЛЕНИЕМ | 2017 |
|
RU2675429C2 |
Изобретение относится к механике и предназначено для использования в механизмах, где требуется надежная фиксация оболочки троса, герметичность соединения и эстетический вид. Устройство гибкой передачи механических усилий состоит из оболочки (4), выполненной из антифрикционного материала, двух резьбовых заклепок (3, 5) и троса (2). Одна резьбовая заклепка (3) неподвижно закреплена на корпусе (1) механизма, в которую вворачивается оболочка (4) без предварительного нарезания на ней резьбы. Вторая резьбовая заклепка (5) закреплена на другом корпусе механизма, в которую ввернут таким же образом другой конец оболочки, и установлена с возможностью поворачиваться вокруг своей оси так, что, вращая оболочку, в первой резьбовой заклепке, или вращая вторую резьбовую заклепку, относительно оболочки, изменяется длина оболочки между корпусами механизмов. Изобретение позволяет упростить конструкцию, повысить надежность, герметичность соединения и возможность регулировки натяжения троса. 5 ил.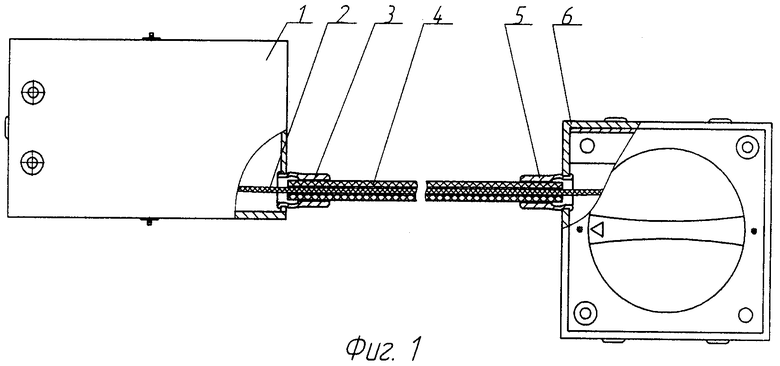
Устройство гибкой передачи механических усилий, состоящее из оболочки, выполненной из антифрикционного материала, двух резьбовых заклепок и троса, отличающееся тем, что одна резьбовая заклепка неподвижно закреплена на корпусе механизма, в которую вворачивается оболочка без предварительного нарезания на ней резьбы, вторая резьбовая заклепка - на другом корпусе механизма, в которую ввернут таким же образом другой конец оболочки, установлена с возможностью поворачиваться вокруг своей оси так, что, вращая оболочку в первой резьбовой заклепке или вращая вторую резьбовую заклепку относительно оболочки, изменяют длину оболочки между корпусами механизмов, в результате происходит натяжение троса, чем достигается упрощение конструкции, уменьшение габаритов, надежная фиксация оболочки и образование самоконтрящихся узлов.
| МЕХАНИЗМ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ С ГИБКИМ ЗВЕНОМ | 1996 |
|
RU2123141C1 |
| ГИБКИЙ ВАЛ | 1991 |
|
RU2097611C1 |
| Устройство приоритета | 1982 |
|
SU1030803A1 |
| US 4833937 A, 30.05.1989. | |||

