Изобретение относится к механизмам дистанционного управления с гибким звеном.
Известен кулисный механизм с гибким звеном, содержащий ведущий и ведомый шкивы, соединенные замкнутым гибким тросом, и рычаг, соединенный с тросом [1].
Недостатком данной конструкции является то, что оси вращения шкивов и ось качания рычага имеют жесткую связь, что делает невозможным применение данного механизма при относительном перемещении осей вращения ведущего и ведомого шкива.
Целью предлагаемого технического решения является обеспечение работоспособности механизма при относительном перемещении осей вращения ведущего и ведомого шкива. Указанная цель достигается тем, что на участке между ведущим и ведомым шкивом ветви гибкого троса заключены в гибкие оболочки, концы которых кинематически жестко связаны с осями ведущего и ведомого шкивов.
Предлагаемое техническое решение иллюстрируется чертежами, где:
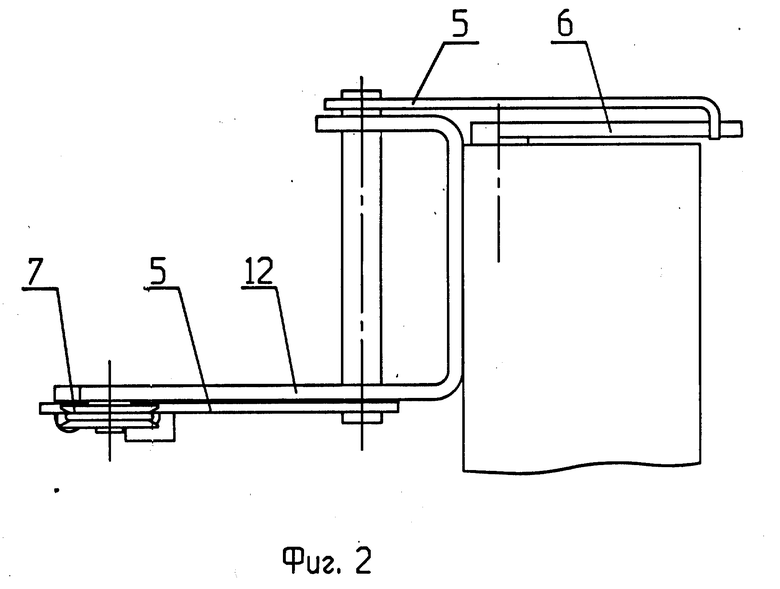
фиг.1 - общий вид механизма;
фиг.2 - вид "А" на фиг.1.
Механизм дистанционного управления содержит ведущий шкив 1 с рукояткой 2, трос 3 с оболочками 4, двуплечий рычаг 5 и приводной рычаг 6. Трос огибает ведомый шкив 7, и концы его закреплены в пазу 8 на ведущем шкиве 1. Оболочки закреплены в опорах 9 и 10.
Для регулировки натяжения троса служит резьбовой наконечник 11. Ось вращения ведомого шкива, ось качания двуплечего рычага и концы оболочек закреплены на общем кронштейне 12. Противоположные концы оболочек и ось качания ведущего шкива закреплены на другом кронштейне 13, причем эти кронштейны имеют возможность относительного перемещения. Один конец двуплечего рычага 5 в точке "Б" жестко соединен с тросом 3, а другой конец имеет паз, в который входит приводной рычаг 6.
Работает механизм следующим образом.
Для переключения приводного рычага 6 из одного положения в другое оператор поворачивает ведущий шкив 1 за рукоятку 2. При этом усилие через трос 3 и жесткую заделку в точке "Б" передается на двуплечий рычаг 5, который другим концом нажимает на приводной рычаг 6 и переводит его из одного положения в другое.
Применение гибкого троса с оболочками, один конец которых имеет жесткую связь с осью качания ведущего шкива, а другой - с осью качания ведомого шкива и двуплечего рычага, позволяет расположить ведущий и ведомый шкивы на значительном расстоянии друг от друга с возможностью взаимных перемещений. Причем при относительном перемещении осей вращения шкивов не происходит поворота ведомого шкива, если не вращается ведущий шкив.
Источник информации
1. Артоболевский И.И. "Механизмы в современной технике". Справочное пособие в 7 томах. М., Наука, 1979 г. Том. 3, стр. 157, рис. 1773.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЧЕСКАЯ ЧАСТЬ ТОРМОЗА ЧЕТЫРЕХОСНОЙ ТЕЛЕЖКИ ВОСЬМИОСНОГО ВАГОНА | 2000 |
|
RU2216472C2 |
| МЕХАНИЗМ ПЕРЕКЛЮЧЕНИЯ ПИТАНИЯ ПУШКИ | 1992 |
|
RU2094730C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ НАКЛОНА ОБЪЕКТОВ | 1998 |
|
RU2142613C1 |
| МЕХАНИЗМ ДИСТАНЦИОННОГО ПЕРЕЗАРЯЖАНИЯ АВТОМАТИЧЕСКОГО ГРАНАТОМЕТА | 2001 |
|
RU2202085C1 |
| МАШИНА ДЛЯ ШТАМПОВКИ СЕТКИ ИЗ ЛИСТОВОГО МАТЕРИАЛА | 2001 |
|
RU2202428C2 |
| ОГРАНИЧИТЕЛЬ ГРУЗОПОДЪЕМНОСТИ КРАНА (ВАРИАНТЫ) | 1998 |
|
RU2145568C1 |
| ПРИВОД ТОРМОЗА ПОДЪЕМНОГО МЕХАНИЗМА ОРУЖИЯ | 1992 |
|
RU2089816C1 |
| Манипулятор роботизированного хирургического комплекса | 2020 |
|
RU2754219C1 |
| МЕХАНИЗМ ОТКРЫВАНИЯ И ЗАКРЫВАНИЯ ДВЕРИ ИЗОТЕРМИЧЕСКОГО ВАГОНА | 1997 |
|
RU2151076C1 |
| Ведущий манипулятор роботохирургического комплекса | 2022 |
|
RU2803231C1 |
Механизм предназначен для дистанционного управления. Механизм содержит ведущий и ведомый шкивы, соединенные замкнутым гибким тросом и рычаг, соединенный с тросом. На участке между ведущим и ведомым шкивами ветви гибкого троса заключены в гибкие оболочки, один конец которых кинематически жестко связан с осью вращения ведущего шкива, а противоположные концы оболочек жестко связаны с осью вращения ведомого шкива. Обеспечивается возможность относительного перемещения осей вращения ведущего и ведомого шкивов. 2 ил.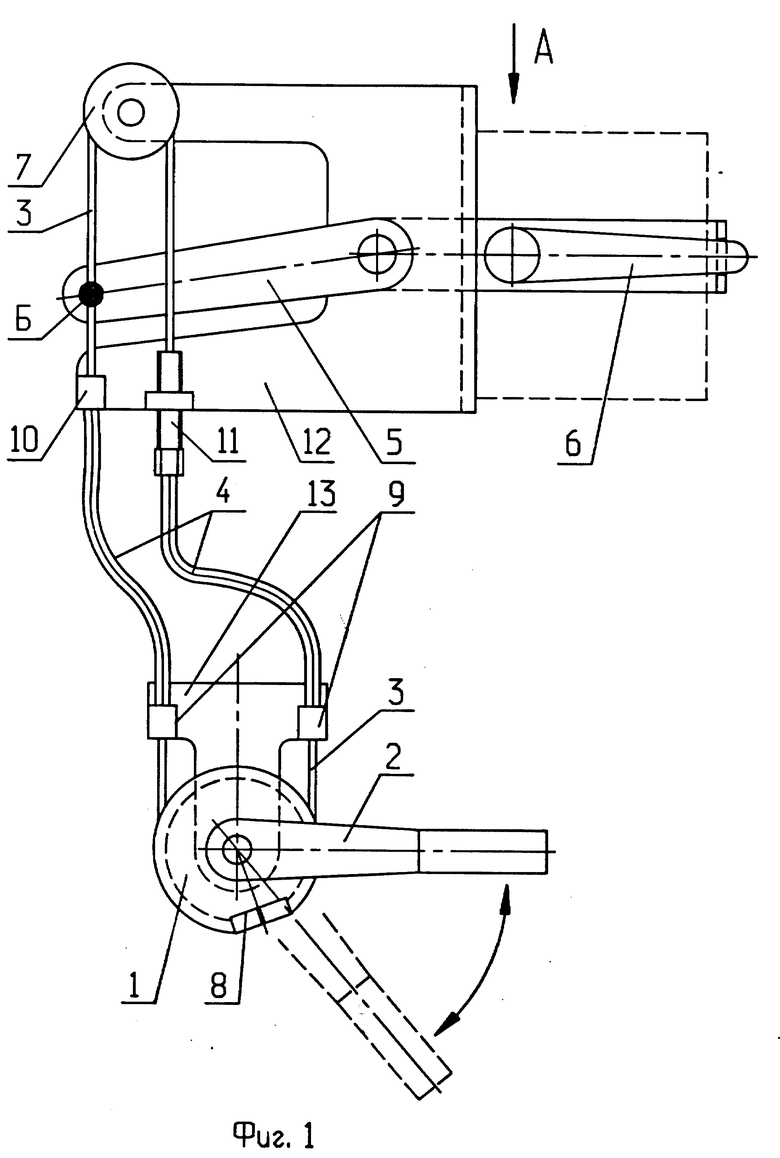
Механизм дистанционного управления с гибким звеном, содержащий два шкива, соединенные замкнутым гибким тросом, и рычаг, одним концом соединенный с тросом, отличающийся тем, что на участке между шкивамм ветви гибкого троса заключены в гибкие оболочки, концы которых кинематически жестко связаны с осями шкивов.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Артоболевский И.И | |||
| Механизмы в современной технике | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| - М.: Наука, 1979, т.3, с.157, рис.1773 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| СПОСОБ ПОЛУЧЕНИЯ ПЛЕНКООБРАЗОВАТЕЛЯ | 1999 |
|
RU2161629C2 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Логическая игрушка "Калейдоскоп | 1988 |
|
SU1600821A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| СПОСОБ ПЕРЕРАБОТКИ УРАНСОДЕРЖАЩИХ КОМПОЗИЦИЙ | 1999 |
|
RU2158973C2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Дистанционная механическая передача | 1983 |
|
SU1174618A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Преобразующее устройство | 1984 |
|
SU1361404A1 |

