Изобретение относится к осветительному устройству для цилиндрических объектов.
Промышленная обработка изображений занимается, среди прочего, автоматическим исследованием металлических частей, которые могут иметь любые свойства поверхности и формы. Обнаруживаемые при этом дефекты можно разделить на два принципиальных типа дефектов: загрязнения, а также деформации поверхности. Типичными примерами дефектов являются углубления, царапины, вмятины, пятна, загрязнения и потертости.
Для автоматического исследования металлические части снимаются одной или нескольким камерами при согласованном освещении. При этом может исследоваться вся поверхность металлической части. Затем применяют математические способы для автоматического обнаружения дефектов в изображении поверхности. При этом должна обеспечиваться возможность различения в изображении поверхности имеющих дефекты зон поверхности от не имеющих дефекты зон. С этой точки зрения блестящие поверхности представляют трудности при выборе и расположении подходящих компонентов освещения.
Известно применение испытательных способов без разрушения для контроля цилиндрических металлических конструктивных частей, в которых используются электромагнитные поля или ультразвуковые волны. С их помощью можно обнаруживать внутренние и наружные трещины в цилиндрах. Например, в US 5408104 раскрыто исследование цилиндрических металлических частей с использованием кольцеобразного флуоресцентного источника света.
В DE 10139589 А1 приведено описание системы для рассеянного освещения пространства с помощью состоящего из множества светодиодов источника света.
Задачей одного варианта осуществления изобретения является создание осветительного устройства, способа исследования поверхности и соответствующего компьютерного программного продукта, с помощью которых можно обнаруживать дефекты поверхности цилиндрических объектов. Решение этих задач осуществляется с помощью признаков независимых пунктов формулы изобретения.
Предпочтительные модификации заданы признаками зависимых пунктов формулы изобретения.
Первый аспект изобретения относится к осветительному устройству. Оно содержит цилиндрический светильник с расположенной внутри него цилиндрической щелевой диафрагмой. Светильник содержит цилиндрический источник света, например галогенную лампу с расположенным в ней диффузором, и щелевая диафрагма состоит из снабженного проходящими в осевом направлении щелями цилиндра. В цилиндре щели расположены так, что проходящие перпендикулярно оси цилиндра, соответственно, щелевой диафрагмы через щели линии сходятся внутри щелевой диафрагмы в расположенной на расстоянии от оси цилиндра точке.
При работе цилиндрический источник света создает во взаимодействии с расположенным в нем диффузором диффузное излучение, которым сначала гомогенно освещается щелевая диафрагма. Внутри цилиндрической щелевой диафрагмы находится подлежащий проверке объект. Он сам выполнен цилиндрическим и расположен коаксиально источнику света. Часть диффузного освещения проходит через щели щелевой диафрагмы и отражается подлежащим проверке объектом, например металлическим, а также, например, блестящим цилиндрическим объектом. За счет ввода излучения, который осуществляется не перпендикулярно оси цилиндра, можно отводить отраженное излучение в виде параллельного пучка лучей и детектировать с помощью детектора в виде состоящего из светлых и темных полос полосового узора.
Отводимое из осветительного устройства излучение является по своей природе диффузным излучением. Если облучать этим излучением безупречно изогнутую поверхность, то отраженное излучение создавало бы на проекционном экране полосовой узор с темными и светлыми полосами. При этом светлые полосы имели бы заданную яркость и заданную геометрию. Светлые полосы располагались бы на одинаковом расстоянии друг от друга. При этом следует отметить, что проекционный экран не является составной частью осветительного устройства, а лишь представляемым вспомогательным средством для характеристики состава излучения.
При оценке такого полосового узора (картины) не безупречных поверхностей устанавливаются отклонения от указанного выше идеального полосового узора. Если проверяемый объект имеет загрязнения, то это проявляется в изменении локальной отражательной способности и в отклонении яркости полос от заданной яркости. Таким образом, за счет оценки яркости полос можно делать вывод о загрязнениях. Если проверяемый объект имеет локальные деформации на поверхности, то они имеют определенные высоту, соответственно, глубину и вызывают локально изменение нормали к поверхности по сравнению со случаем плоской поверхности. В зависимости от проявления этого параметра изменяется кривизна светлых полос. Таким образом, оценка геометрии полос позволяет делать вывод о деформациях. При этом следует отметить, что оба указанных отклонения могут присутствовать одновременно в единственном полосовом узоре. Тем самым, с помощью предложенного осветительного устройства можно обнаруживать одновременно оба типа дефектов и, как правило, идентифицировать с помощью компьютера.
Осветительное устройство имеет компактную форму и содержит небольшое количество компонентов, что приводит к низкой стоимости изготовления. Устройство может работать с излучением в видимом диапазоне, так что осветительное устройство может дополнять известные способы проверки без разрушения на оптической основе.
В одном варианте осуществления осветительное устройство имеет светильник, который имеет, по меньшей мере, три расположенных друг в друге цилиндрических источника света. Таким образом, простым и экономичным способом можно создавать светосильный светильник при выборе источников света с большой световой отдачей. Источники света могут быть галогенными лампами или кольцевыми светильниками со светодиодами. Для обеспечения приемлемой скорости проверки для подлежащего исследованию объекта освещенность должна составлять, по меньшей мере, 230000 люкс, предпочтительно, по меньшей мере, 250000 люкс.
В другом варианте осуществления осветительного устройства предусмотрено использование диффузора, по меньшей мере, из трех расположенных друг в друге цилиндрических непрозрачных пластмассовых и/или стеклянных тел. За счет такого выбора можно просто и особенно экономично получать диффузное излучение. Пластмассовые и/или стеклянные тела могут быть выполнены либо мутными, или же шершавыми на поверхности, например, с помощью пескоструйной обработки.
В другом варианте осуществления осветительного устройства осветитель и щелевая диафрагма расположены коаксиально друг другу. Это геометрически согласованное освещение приводит к обеспечению равномерно освещенной поверхности проверяемого объекта, если объект также выполнен цилиндрическим. Равномерное диффузное освещение приводит при отражающих, соответственно, блестящих проверяемых объектах к хорошим результатам измерения, поскольку при направленном излучении в зависимости от положения проверяемого объекта можно получать сильно различающиеся уровни яркости при одинаково выполненных поверхностях объекта. Таким образом, это геометрически согласованное освещение обеспечивает возможность исследования блестящих поверхностей цилиндрических проверяемых объектов и, например, металлических проверяемых объектов.
В одном варианте осуществления осветительное устройство имеет щелевую диафрагму с толщиной стенки, по меньшей мере, 3 мм. При меньшей толщине стенки щелевой диафрагмы попадает больше постороннего света в обнаруживающий полосовой узор детектор, при этом еще большая толщина стенки не может заметно уменьшать долю постороннего света.
В одном варианте осуществления осветительное устройство имеет расположенную снаружи светильника шторку для постороннего света. Она предотвращает освещение полученного, например, с помощью строчной камеры полосового узора, так что полосовой узор лучше виден, соответственно, является более контрастным.
Другой аспект изобретения относится к светильнику для диффузного освещения цилиндрического проверяемого объекта. Светильник содержит цилиндрический источник света, например галогенную лампу, с коаксиально расположенным в нем цилиндрическим диффузором. При выборе цилиндрической галогенной лампы обеспечивается возможность одновременного получения большой световой отдачи и длительного срока службы. Вместо единственной лампы могут быть также предусмотрены несколько и, в частности, по меньшей мере, три расположенных друг в друге цилиндрических источника света для получения простым и экономичным образом светосильного светильника. При этом также возможно выбирать диффузор, состоящий, по меньшей мере, из трех расположенных коаксиально друг с другом непрозрачных пластмассовых и/или стеклянных тел.
Другой аспект изобретения относится к щелевой диафрагме, состоящей из цилиндра с проходящими в осевом направлении щелями. Щели расположены так, что проходящие перпендикулярно оси щелевой диафрагмы через щели воображаемые линии сходятся внутри щелевой диафрагмы в расположенной на расстоянии от оси цилиндра точке М. При использовании проверяемый объект находится внутри щелевой диафрагмы, может освещаться диффузным светом наклонно к оси цилиндра, так что от цилиндра можно отводить параллельный пучок света. Как указывалось выше, это освещение можно использовать для обнаружения деформаций на поверхности проверяемого объекта.
Другой аспект изобретения относится к способу распознавания дефектов на поверхности цилиндрического объекта. В этом способе на проверяемый объект подают освещение, которое может создавать на проекционном экране или же, что равноценно, на датчике камеры узор (картину) из смежных друг с другом светлых и темных полос. При этом освещение может быть таким, которое создается с помощью указанного выше осветительного устройства. Отраженное от поверхности объекта излучение детектируется с разрешением по месту, и измеренные значения отображаются в виде изображения. Например, при детектировании каждой зоне места может соответствовать один пиксель, так что совокупность пикселей создает изображение. Для каждой точки изображения или лишь части этих точек изображения вычисляют несколько признаков. Один признак может быть связанной с точкой изображения геометрической информацией или же связанным с точкой изображения физическим параметром. Затем идентифицируют точки изображения, в которых значение признака лежит выше и/или ниже заданного порогового значения. Как правило, это выполняют для всех вычисленных признаков. Затем идентифицируют зоны изображения, в которых идентифицированные точки изображения превышают заданную плотность. В этом случае каждая область изображения представляет одну зону изображения и, соответственно, одну часть поверхности проверяемого объекта, где, возможно, имеется дефект. В последней стадии идентифицируют дефект, соответственно, дефектную область за счет того, что там соответствующие, по меньшей мере, двум различным признакам дефектные области находятся достаточно близко друг к другу.
Указанный выше способ обеспечивает возможность идентификации дефектов поверхности с большой надежностью относительно искусственно вызванных явлений и позволяет также отличать загрязнения на поверхности (например, брызги краски на поверхности) от деформаций (например, царапин). При соответствующем выборе признаков можно также различать вид деформации, соответственно, вид загрязнения.
Указанный способ можно согласно одному варианту осуществления выполнять так, что признаки вычисляются лишь для тех точек изображения, на которые излучение падает с минимально допустимой интенсивностью. Так, например, можно вычислять, что на практике в большинстве случаев достаточно, признаки лишь для тех точек изображения, которые образуют светлые полосы детектированного полосового узора. Таким образом, можно значительно сократить объем вычислений.
Кроме того, в одном варианте осуществления предусмотрено, что в качестве признаков выбирается расстояние соответствующей точки изображения до выбранной точки изображения, обнаруженная интенсивность излучения в точке изображения, отклонение положения точки изображения от опорной точки внутри накладываемой на изображение маски и/или расстояние друг от друга двух светлых или темных полос. В первом случае выбранная точка может быть началом системы координат, одна ось которой, например ось x, проходит перпендикулярно полосе, и при этом перпендикулярная ей ось y проходит в направлении полосы. В третьем случае оценка изображения осуществляется с помощью маски, т.е. в заданной зоне изображения, например, из 100×100 пикселей, причем опорная точка может лежать в центре маски.
В другом варианте осуществления способ выполняют так, что используют признаки, значения которых изменяются лишь за счет загрязнения поверхности объекта, или же используют признаки, которые изменяются лишь за счет деформаций на поверхности объекта. Таким образом, в зависимости от выбранных признаков можно различать при дефектах между двумерными дефектами (2D) и трехмерными дефектами (3D). Дефект можно, например, идентифицировать в качестве трехмерного дефекта за счет того, что выбираются признаки, значения которых не изменяются или изменяются незначительно при трехмерных дефектах, но изменяются при загрязнении. Соответственно, двумерный дефект можно идентифицировать, когда избраны признаки, которые не изменяются или изменяются незначительно при двумерных дефектах.
Кроме того, в одном варианте осуществления предусмотрено, что делают вывод о деформации поверхности объекта, соответственно, распознают деформацию в качестве дефекта, когда при перекрытии областей изображения одного из соответствующих признаков обнаруживается отклонение положения точки изображения относительно заданной опорной точки внутри наложенной на изображение маски. Этот признак изменяется в смысле последнего абзаца достойным упоминания образом лишь тогда для точек изображения, когда точка изображения лежит в зоне деформации (например, в царапине). Если же, наоборот, точка изображения находится в зоне загрязнения, то этот признак претерпевает лишь минимальные изменения.
Другой аспект изобретения относится к компьютерному программному продукту на считываемом компьютером носителе для выполнения указанного выше способа для распознавания дефектов на поверхности цилиндрического объекта. Считываемый компьютером носитель, например CD или DVD, содержит читаемые компьютером программные средства, которые приводят к оценке компьютером состоящего из светлых и темных полос изображения, которое получено, например, с помощью указанного выше осветительного устройства и отражено цилиндрическим проверяемым объектом. А именно, программные средства приводят к тому, что компьютер вычисляет для каждой точки изображения или для части точек изображения, которое состоит из узора смежных друг с другом светлых и темных полос, несколько признаков. Затем компьютер идентифицирует точки изображения, в которых значение, по меньшей мере, одного признака лежит выше и/или ниже заданного порогового значения, и идентифицирует области изображения, в которых идентифицированные точки изображения превышают заданную плотность. Такая область изображения представляет участок изображения, где, возможно, имеется дефект. Дефект идентифицируется за счет того, соответственно, область изображения идентифицируется в качестве дефектной области за счет того, что две относящиеся к двум различным признакам области изображения лежат достаточно близко друг к другу.
В другом варианте осуществления компьютерная программа предназначена для вычисления лишь признаков тех точек изображения, которые освещаются с минимально допустимой интенсивностью. Так, например, можно вычислять лишь признаки относящихся к светлым полосам полосового узора точек изображения, за счет чего уменьшается объем вычислений.
Кроме того, в одном варианте осуществления компьютерная программа может быть предназначена для идентификации дефектов в качестве загрязнения или в качестве деформации объекта в зависимости от признаков.
Другие признаки и преимущества предлагаемого изобретения следуют из приведенного ниже подробного описания со ссылками на прилагаемые чертежи, которые приведены в качестве не имеющих ограничительного характера примеров. При этом использование позиций на фигурах не следует понимать как ограничение объема защиты предлагаемого изобретения. На чертежах изображено:
фиг.1а, 1b - вариант осуществления светильника для обеспечения диффузного освещения;
фиг.2 - вариант осуществления щелевой диафрагмы;
фиг.3 - вариант осуществления осветительного устройства, на виде сверху;
фиг.4а, 4b - вариант осуществления осветительного устройства, на виде сбоку;
фиг.5а-d - фотографии полосовых узоров металлической поверхности;
фиг.6 - блок-схема выполнения способа распознавания дефектов на поверхности цилиндрического объекта;
фиг.7 - фотографии полосовых узоров.
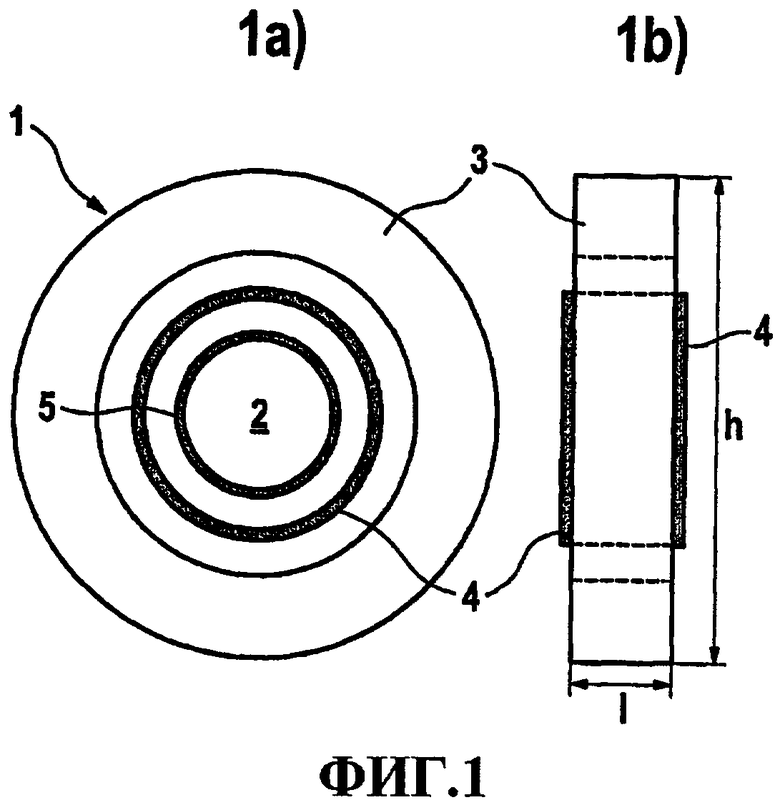
На фигурах одинаковые элементы обозначены одинаковыми позициями, при этом на фиг.1а и 1b показан один вариант осуществления цилиндрического и по существу кольцеобразного светильника 1, а именно на фиг.1а на виде в направлении оси цилиндра, а на фиг.1b - перпендикулярно оси цилиндра. Размеры светильника можно свободно выбирать в широких пределах в соответствии с радиусом цилиндрического проверяемого объекта, который располагается в центральной зоне 2. В данном случае наружный диаметр источника света 3 выбран с h = 200 мм.
Источник 3 света состоит в целом из шести отдельных источников света (не изображены). Они выбираются с точки зрения длительного срока службы, высокой световой отдачи, компактности и высокой способности рассеяния. Источники света являются галогенными лампами фирмы Филипс с номенклатурным номером DDL/01. Она работает с напряжением 20 В, имеет мощность 150 Вт и ламповый цоколь GX 5,3. Коаксиально источнику 3 света расположен цилиндрический диффузор 4. Он состоит из нескольких, например 8, расположенных друг в друге непрозрачных стеклянных тел (не изображены). В качестве альтернативного решения можно использовать полупрозрачные пластмассовые тела. Толщина стенки диффузора, в данном случае 23 мм, и число стеклянных тел согласованы с силой света и замутненностью стекла.
Внутри диффузора 4 находится цилиндрический проверяемый объект 5. Источник 3 света и диффузор 4 имеют одинаковую с проверяемым объектом 5 геометрию, т.е. также согласованы с цилиндрической геометрией проверяемого объекта 5. Диффузор 4 служит для распределения излучения источника 3 света равномерно по поверхности проверяемого объекта 5.
Диффузное излучение светильника 1 служит для обнаружения загрязнений на поверхности проверяемого объекта 5. Диффузное излучение отражается от его поверхности и может обнаруживаться с помощью матрицы светодиодов большой поверхности или строчной камеры. В качестве альтернативного решения можно работать с непрямым освещением с помощью экранов.
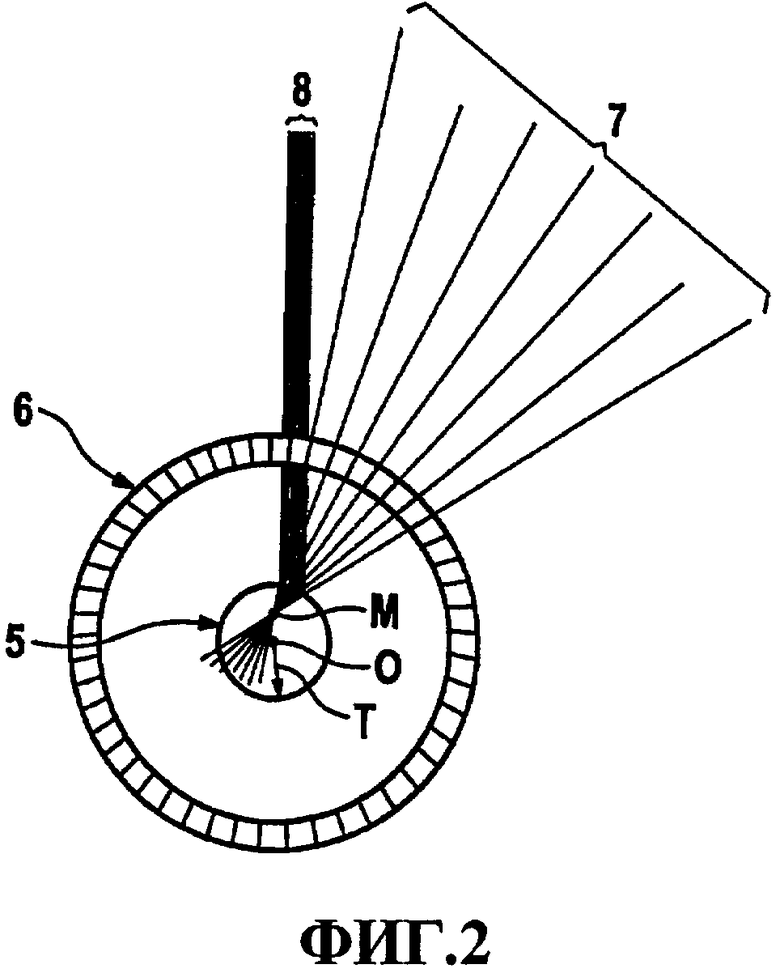
На фиг.2 показан вариант выполнения щелевой диафрагмы 6. Цилиндрическая щелевая диафрагма 6, которая в продольном направлении цилиндра снабжена щелями, состоит из алюминия или циркония и диффузно освещается при ее использовании (не изображена). Падающие через щели световые лучи 7 диффузного освещения ориентированы за счет геометрии щелей так, что они при присутствии проверяемого объекта 5 внутри щелевой диафрагмы 6 сходятся в точке М. Положение точки М согласовано с диаметром r проверяемого объекта 5.
Проверяемый объект 5 имеет проходящую через точку О перпендикулярно плоскости фигуры ось. Если проверяемый объект 5 расположен коаксиально, то расстояние между точкой О и точкой М меньше радиуса r. Падающие лучи 7 отражаются от поверхности проверяемого объекта 5. Поскольку они входят наклонно относительно проходящей через точку О оси и тем самым наклонно к плоскости фигуры, можно выводить выходящие лучи 8 на заднем конце щелевой диафрагмы 6 в виде параллельного пучка лучей.
Во время измерения проверяемый объект 5 перемещают в осевом направлении со скоростью проверки около 50±5 см/с, и отраженные лучи 7 измеряются с тактовой скоростью 5000 1/с, т.е. 5000 строк (детектора) в секунду. Эта скорость проверки возможна лишь с высокой силой освещения, которая составляла 270000 люкс.
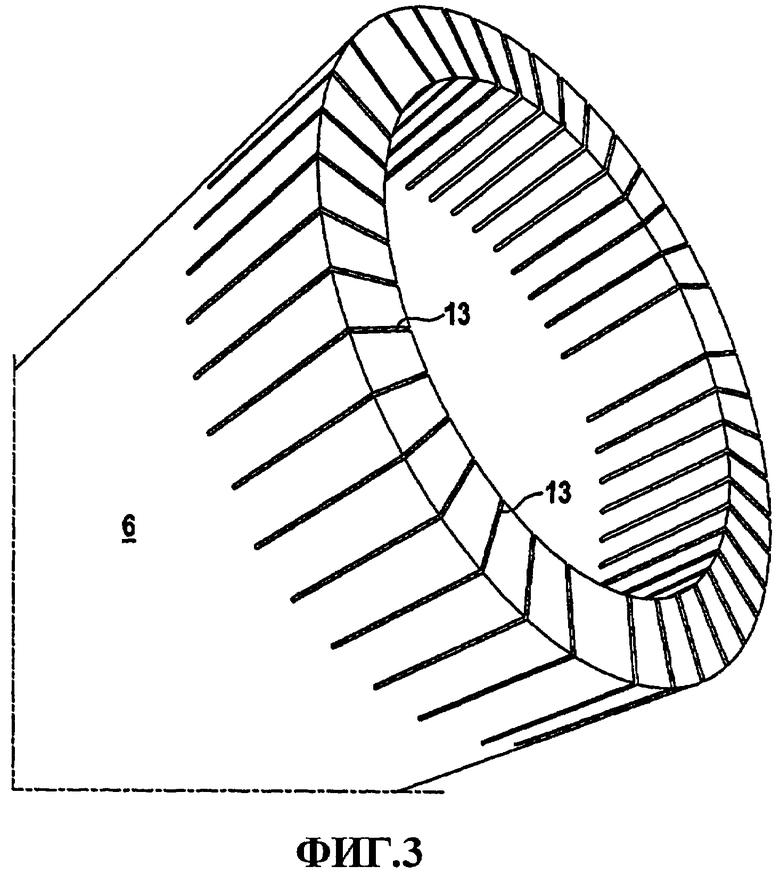
На фиг.3 показан вариант осуществления осветительного устройства 9. Цилиндрический светильник 1, а именно согласно показанному на фиг.1 варианту выполнения, освещает щелевую диафрагму 6. Она является щелевой диафрагмой согласно фиг.2. Светильник 1 и щелевая диафрагма 6 являются цилиндрическими и расположены коаксиально друг другу. На фиг.3а показана эта система на виде в продольном направлении цилиндра.
На фиг.4а показан вариант осуществления осветительного устройства 9. Цилиндрический светильник 1, а именно согласно показанному на фиг.1 варианту выполнения, освещает щелевую диафрагму 6. Она является щелевой диафрагмой согласно фиг.2. Светильник 1 и щелевая диафрагма 6 являются цилиндрическими и расположены коаксиально друг другу. На фиг.3а показана эта система на виде в продольном направлении цилиндра.
На фиг.4b показано осветительное устройство 9 на виде сбоку, при этом ось цилиндра проходит горизонтально. Светильник 1 освещает щелевую диафрагму 6 падающими под углом α относительно нормалей к поверхности проверяемого объекта 5 лучами, так что можно отводить выходящие лучи 8 на заднем конце щелевой диафрагмы 6. Они детектируются строчной камерой 10 с установленной перед ней диафрагмой 11. Для улучшения контрастности изображения щелевая диафрагма 6 снабжена на выходном конце шторкой 12 для постороннего света. Расположение щелей 13, т.е. их длина и положение, согласовано с наружным диаметром проверяемого объекта. Длина щелей в продольном направлении определяет яркость светлых полос. При выборе более коротких щелей уменьшается контраст по яркости между светлыми и темными полосами. Расположение, соответственно, ориентация щелей перпендикулярно оси цилиндра и ширина щелей согласована с геометрией ожидаемого пучка лучей, так что все выходящие световые лучи проходят параллельно в направлении строчной камеры 10. В изображении камеры возникает периодический полосовой узор, состоящий из светлых и темных полос. Подходящим образом выбранная толщина стенки, например 3 мм в данном варианте выполнения, обеспечивает не попадание постороннего света в изображение камеры.
Структурированное освещение работает с простым, не кодированным узором. Щели 13 обуславливают полосы с известным периодом, которые проецируются вдоль оси цилиндра. С помощью такого освещения можно легко измерять трехмерные структуры, соответственно, изменения в цилиндрической форме проверяемого объекта 5.
Оба существенных вида дефектов, а именно деформации и загрязнения, можно одновременно измерять с помощью осветительного устройства 9, поскольку они оба приводят к искажению идеального полосового узора. Как будет пояснено подробнее ниже, информация о дефектах поверхности лежит в яркости и при дефектах формы изменения формы определяются по изгибу светлых полос.
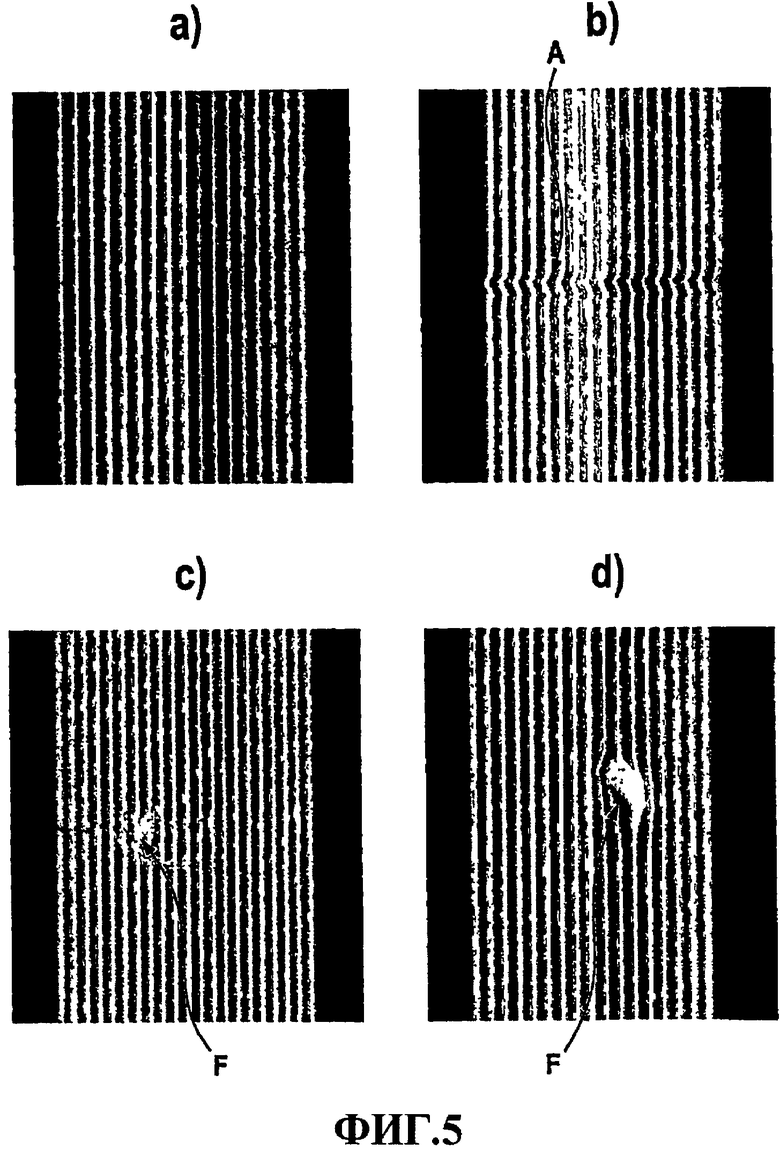
На фиг.5 показан полосовой узор, который измеряется строчной камерой 10 и может быть выведен, например, на экран компьютера для указания. При этом на фиг.5а показан случай металлической поверхности хорошего качества, т.е. поверхности без дефектов. Последовательность проходящих вертикально светлых и темных полос имеет по существу одинаковое расстояние между полосами. Используемая для этого снимка строчная камера 10 не требует калибровки. В этом, так же как в других случаях, можно надежно отличать не имеющие дефектов зоны поверхности от зон с дефектами.
На фиг.5b показана та же поверхность, что и на фиг.5а, однако она имеет в середине изображения искусственно вызванные явления А за счет неправильного обращения с объектом во время измерения. Посредством модификации обращения с объектом, например перемещения или ориентации проверяемого объекта 5 под осветительным устройством 1, можно при известной хорошей поверхности уменьшить силу искусственно вызванных явлений или полностью исключить их. При подлежащих проверке незнакомых поверхностях можно тем самым отличать дефекты от искусственно вызванных явлений.
На фиг.5с показано изображение поверхности с двумерным дефектом F, например (плоским) загрязнением краской, тогда как на фиг.5d показан проверяемый объект с трехмерным дефектом F, а именно с царапиной.
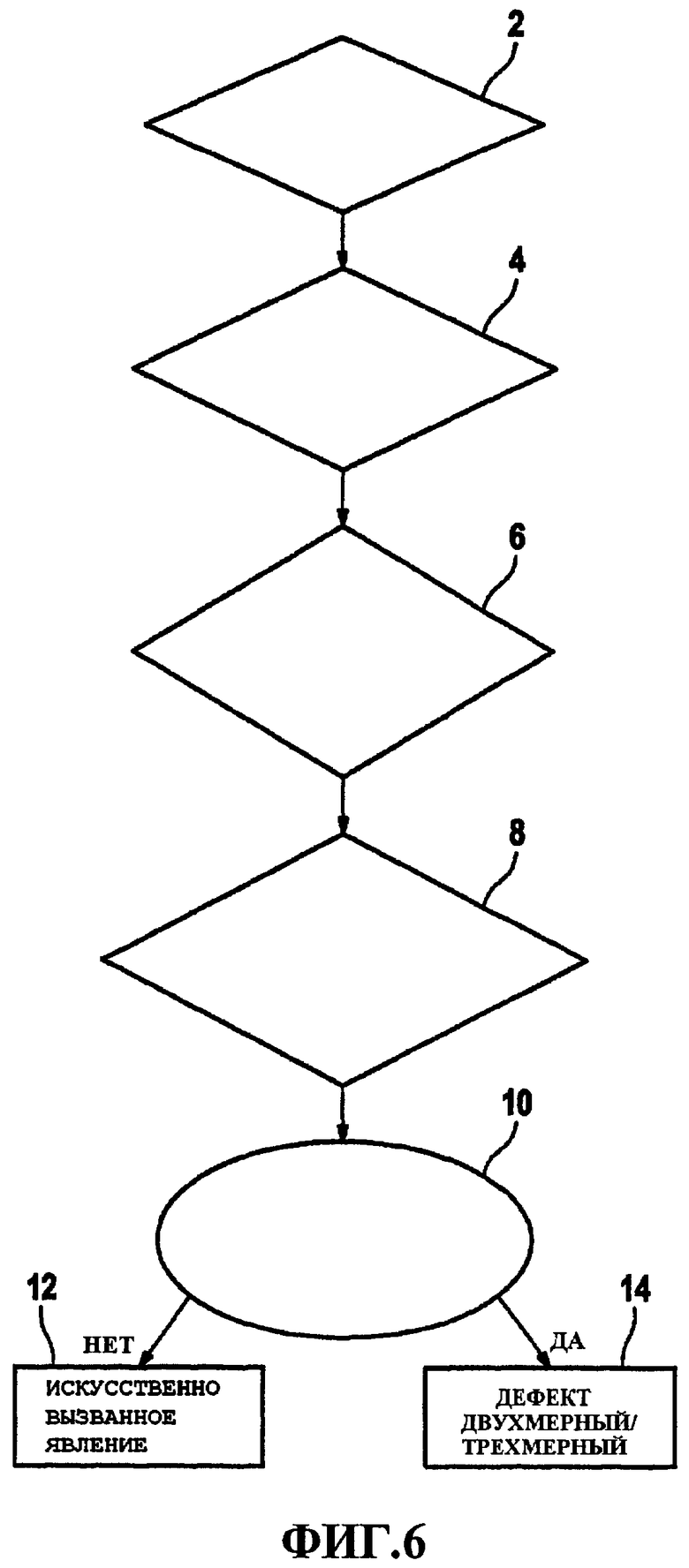
На фиг.6 показана блок-схема выполнения способа распознавания дефектов на поверхности цилиндрического объекта. Способ начинается в стадии 2 с получением изображения поверхности объекта. Эта стадия 2 содержит, с одной стороны, освещение цилиндрического объекта излучением, которое способно создавать на проекционном экране узор из смежных друг с другом светлых и темных полос, и, с другой стороны, обеспечивает обнаружение с разрешением по месту отраженного от поверхности объекта излучения наряду с получением измеренных величин в виде изображения. Обнаружение с разрешением по месту можно осуществлять с помощью строчного или плоскостного детектора, который развертывает поверхность проверяемого объекта по пикселям. Результатом является цифровое изображение, например показанное на фиг.5а-d, которое можно оценивать с помощью компьютера.
В стадии 4 для всех пикселей или для частичного массива пикселей вычисляют признаки а, b, с…. Применяемый для этого частичный массив может состоять из тех пикселей, которые образуют светлые полосы, причем в этом случае светлые полосы идентифицируют по интенсивности пикселей. Дополнительно к этому можно вычислять признаки для пикселей, которые образуют темные полосы, причем применяемые при этом признаки могут отличаться от указанных выше признаков а, b, с…. Признаки могут быть расстоянием пикселей до выбранной точки изображения, измеряемой в месте пикселя интенсивностью излучения и/или отклонением положения пикселя относительно заданной опорной точки внутри наложенной поверх изображения маски.
В стадии 6 определяют точки изображения, соответственно, пиксели, значения признаков которых больше или меньше порогового значения. Это выполняется, как правило, для каждого пикселя, причем для каждого признака имеется специальное пороговое значение. Таким образом, задается столько массивов А, В, С пикселей, сколько имеется признаков а, b, с….
В следующей стадии 8 определяют области изображения, где повышена плотность определенных в стадии 6 массивов А, В, С пикселей. То есть осуществляют поиск, где в изображении имеются точки изображения с признаками больше или меньше порогового значения. Эти области изображения представляют возможные дефектные зоны.
В стадии 10 проверяют, находятся ли определенные в стадии 6 области изображения достаточно близко к различным признакам а, b, с. Если это не так, то в стадии 12 распознают искусственно вызванное явление. Если это так, то достаточно близко расположенные области изображения относятся к дефекту. В этом случае дефектную область можно задавать, например, в виде той зоны изображения, например аппроксимированной в виде прямоугольника, которая содержит обе близко соседние области изображения. При этом в зависимости от признаков можно различать, является ли дефект загрязнением (двумерным) или деформацией (трехмерной).
Если выбран признак, изменение величины которого позволяет делать заключение о местном изгибе белых полос, соответственно, о расстоянии точки изображения до выбранной точки изображения, то соответствующая область изображения в случае перекрытия обозначает трехмерный дефект, соответственно, деформацию.
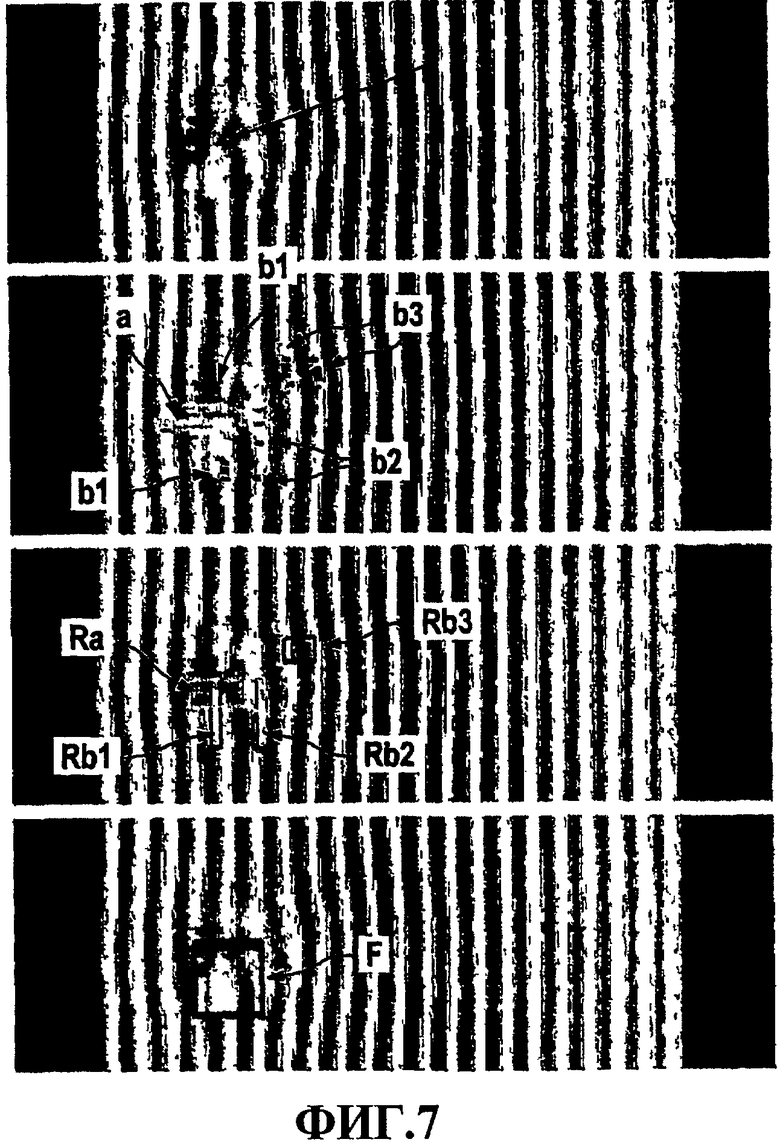
На фиг.7 показана идентификация дефектной области с помощью данного способа на основе четырех фотографий. Самая верхняя фотография на фиг.7 показывает снятую поверхность объекта в соответствии со стадией 2 на фиг.6. Наблюдающий человек предполагал бы наличие дефекта в обозначенной стрелкой области.
Та же поверхность объекта исследуется на основе двух признаков с помощью компьютера на наличие дефекта. Признаками являются:
а) расстояние по горизонтали между обеими соседними темными полосами, при этом одна темная полоса задается там как заданная, если интенсивность пикселей меньше заданного порогового значения;
b) для пикселей белой полосы горизонтальный сдвиг светлых полос.
Имеются пиксели, для которых признак а) превышает заданное пороговое значение. Стрелка, обозначенная позицией «а», указывает эти пиксели. Соответственно, имеются также пиксели, для которых признак b) превышает заданное пороговое значение. Стрелки, обозначенные позициями «b1», «b2» и «b3», указывают эти пиксели. Таким образом, вторая фотография сверху визуализирует результат стадии 6 на фиг.6.
Затем в соответствии со стадией 8 на фиг.6 определяют области изображения, где признаки а), соответственно, b) скученно превышают свое соответствующее пороговое значение. Такой является область Ra изображения, где скученно превышается пороговое значение признака а), а также области Rb1, Rb2 и Rb3, где скученно превышается пороговое значение признака b).
Затем в соответствии со стадией 10 на фиг.6 проверяют, лежат ли области изображения достаточно близко к двум различным признакам а) и b). Относительно области Ra изображения области Rb1 и Rb2 изображения лежат достаточно близко, однако не область Rb3 изображения. Критерий близкого расположения проверяется на основании расстояния между средними точками областей изображения, которые не превышают заданное значение. Дефектную зону определяют за счет того, что, с одной стороны, задают окружающий области Ra и Rb1 изображения прямоугольник и, с другой стороны, окружающий области Ra и Rb2 изображения прямоугольник. На оба прямоугольника, которые имеют лишь небольшое смещение по вертикали, указывает стрелка на самой нижней фотографии на фиг.7.
Перечень позиций
1 - Светильник
2 - Центральная зона
3 - Источник света
4 - Диффузор
5 - Проверяемый объект
6 - Щелевая диафрагма
7 - Входящие лучи
8 - Выходящие лучи
9 - Осветительное устройство
10 - Строчная камера
11 - Диафрагма
12 - Шторка для постороннего света
13 - Щель
А - Искусственно вызванное явление
F - Дефект
A - Пиксели, в которых признак «а» превышает пороговое значение
b1 - Пиксели, в которых признак «b1» превышает пороговое значение
b2 - Пиксели, в которых признак «b2» превышает пороговое значение
b3 - Пиксели, в которых признак «b3» превышает пороговое значение
Rb1 - Область изображения
Rb2 - Область изображения
Rb3 - Область изображения
| название | год | авторы | номер документа |
|---|---|---|---|
| Декоративный светильник | 1990 |
|
SU1742579A1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОВЕРХНОСТНЫХ ДЕФЕКТОВ ЦИЛИНДРИЧЕСКИХ ОБЪЕКТОВ | 2006 |
|
RU2323492C2 |
| СПОСОБ ОБНАРУЖЕНИЯ СКОПЛЕНИЙ БИОЛОГИЧЕСКИХ ЧАСТИЦ | 2011 |
|
RU2604794C2 |
| УСТРОЙСТВО ДЛЯ ОТОБРАЖЕНИЯ ВНУТРЕННЕЙ ПОВЕРХНОСТИ ПОЛОСТИ В ДЕТАЛИ | 2010 |
|
RU2488098C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ДЕФЕКТОВ ПОВЕРХНОСТИ И УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ДЕФЕКТОВ ПОВЕРХНОСТИ | 2014 |
|
RU2637723C1 |
| СВАРОЧНЫЙ ИНСТРУМЕНТ | 2007 |
|
RU2410218C2 |
| УСТРОЙСТВО ДЛЯ ПРОВЕРКИ БАНКНОТ | 2004 |
|
RU2344481C2 |
| СИСТЕМА И ВЫСОКОЭФФЕКТИВНОЕ МНОГОМОДОВОЕ СКАНИРУЮЩЕЕ УСТРОЙСТВО ПОЛУЧЕНИЯ ОТПЕЧАТКА ЛАДОНИ И ОТПЕЧАТКА ПАЛЬЦА | 2008 |
|
RU2474876C2 |
| СПОСОБ ОЦЕНКИ КАЧЕСТВА ПИЛОМАТЕРИАЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2020 |
|
RU2730407C1 |
| СРЕДСТВО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ, УСТРОЙСТВО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ И СПОСОБ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ | 2013 |
|
RU2642156C2 |
Изобретение относится к осветительному устройству для цилиндрических объектов. Осветительное устройство содержит цилиндрический светильник с расположенной внутри него цилиндрической щелевой диафрагмой, в котором светильник содержит цилиндрический источник света с расположенным в нем цилиндрическим диффузором и в котором щелевая диафрагма является снабженным проходящими в осевом направлении щелями цилиндром, щели которого расположены так, что входящие перпендикулярно оси (О) щелевой диафрагмы через щели лучи сходятся внутри щелевой диафрагмы в расположенной на расстоянии от оси цилиндра точке. Технический результат - создание осветительного устройства, способа исследования поверхности и соответствующего компьютерного программного продукта, с помощью которых можно обнаруживать дефекты поверхности цилиндрических объектов. 4 н. и 10 з.п. ф-лы, 7 ил.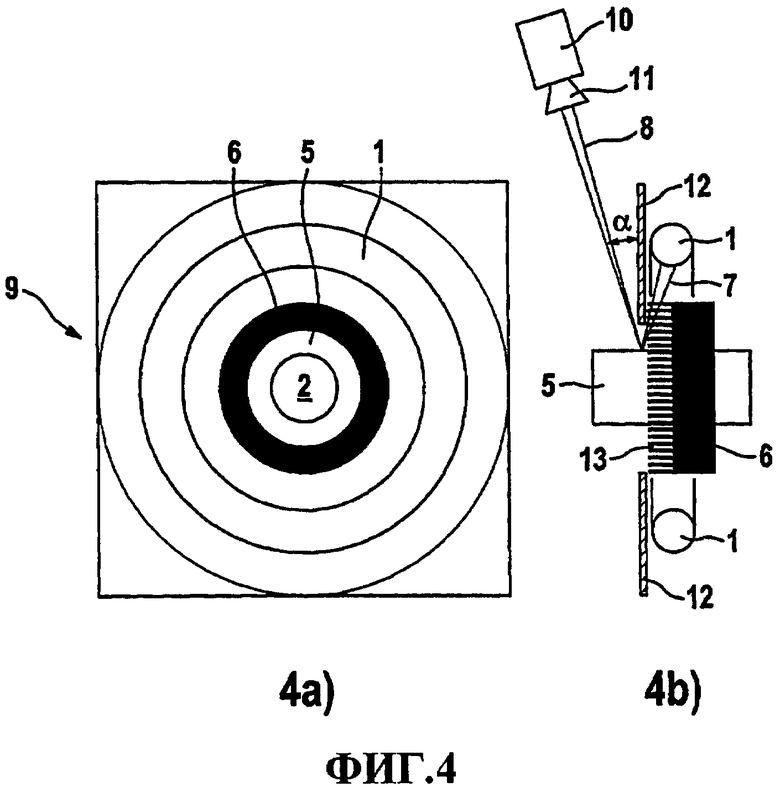
1. Осветительное устройство, содержащее цилиндрический светильник (1) с расположенной внутри него цилиндрической щелевой диафрагмой (6), в котором светильник содержит цилиндрический источник (3) света с расположенным в нем цилиндрическим диффузором (4) и в котором щелевая диафрагма является снабженной проходящими в осевом направлении щелями цилиндром, щели которого расположены так, что входящие перпендикулярно оси (О) щелевой диафрагмы через щели лучи (7) сходятся внутри щелевой диафрагмы в расположенной на расстоянии от оси цилиндра точке (М).
2. Осветительное устройство по п.1, в котором светильник имеет, по меньшей мере, три расположенных друг в друге цилиндрических источника света.
3. Осветительное устройство по п.2, в котором диффузор состоит, по меньшей мере, из трех расположенных друг в друге непрозрачных пластмассовых и/или стеклянных тел.
4. Осветительное устройство по любому из пп.1-3, в котором светильник и щелевая диафрагма расположены коаксиально друг другу.
5. Осветительное устройство по любому из пп.1-4, в котором щелевая диафрагма имеет толщину стенки, по меньшей мере, 3 мм.
6. Светильник, содержащий цилиндрический источник света с освещенностью, по меньшей мере, 230000 люкс с расположенным в нем коаксиально цилиндрическим диффузором.
7. Светильник по п.6, в котором предусмотрены, по меньшей мере, три расположенных друг в друге цилиндрических источника света.
8. Светильник по п.6 или 7, в котором диффузор состоит, по меньшей мере, из трех расположенных коаксиально друг другу непрозрачных пластмассовых и/или стеклянных тел.
9. Способ распознавания дефектов на поверхности цилиндрического объекта (5), содержащий следующие этапы:
a) освещение объекта излучением, сформированным осветительным устройством по одному из пп.1-5, которое может создавать на проекционном экране узор из смежных друг с другом светлых и темных полос;
b) детектирование отраженного от поверхности объекта излучения с разрешением по месту и отображение измеренных значений в виде изображения;
c) вычисление для каждой точки изображения или части точек изображения нескольких признаков;
d) идентификация точек изображения, в которых значение признака лежит выше и/или ниже заданного порогового значения;
e) идентификация областей (Ra, Rb1/Rb2, Rb3) изображения, в которых идентифицированные точки изображения превышают заданную плотность;
f) идентификация дефекта за счет того, что там соответствующие, по меньшей мере, двум различным признакам области изображения находятся достаточно близко друг к другу.
10. Способ по п.9, в котором вычисляют признаки лишь для тех точек изображения, которые освещаются излучением с минимально допустимой интенсивностью.
11. Способ по п.9 или 10, в котором в качестве признаков выбирают:
a) расстояние точки изображения до выбранной точки изображения,
b) и/или детектируемую интенсивность излучения в точке изображения,
c) и/или отклонение положения точки изображения относительно заданной опорной точки внутри наложенной поверх изображения маски,
d) и/или расстояние между двумя светлыми или темными полосами.
12. Способ по п.11, в котором в зависимости от выбранных признаков идентифицируют дефект как загрязнение или как деформацию объекта.
13. Способ по п.12, в котором делают заключение о деформации поверхности объекта, когда при достаточно близко расположенных друг к другу областях изображения один из соответствующих признаков является отклонением положения точки изображения относительно заданной опорной точки внутри наложенной поверх изображения маски.
14. Машиночитаемый носитель, содержащий сохраненные на нем читаемые компьютером программные средства, которые при считывании их компьютером обеспечивают выполнение компьютером этапов способа по пп.9-13.
| Способ диагностики функциональной недостаточности печени | 1983 |
|
SU1156647A1 |
| DE 10139589 А1, 20.02.2003 | |||
| DE 19837797 А1, 10.06.1999 | |||
| US 3619623 А, 09.11.1971 | |||
| JP 63309836 А, 16.12.1988. | |||

