Изобретение относится к способам сборки устройств управления, преимущественно для ракетно-космической техники.
Известен способ балансировки блока управления рулевой машины (РМ), описанный в [1], включающий создание перегрузки к качалке в плоскости симметрии блока управления путем вращения поворотного стола, а также изменение центров масс балансировочных элементов.
Недостатком указанного способа является возможность только визуального контроля и малая точность.
Наиболее близким к предложенному способу - прототипом является способ балансировки блока управления РМ, описанный в [2], включающий установку двух упоров на заданном расстоянии от плоскости симметрии блока управления РМ и соосно плунжерам РМ, подведение подвижных упоров до контакта с качалкой, контроль замыкания подвижным упором и каждым концом качалки электрической цепи, отвод упоров от качалки в направлении, параллельном оси плунжера РМ, и установку равных определенных зазоров между концами качалки и упорами, первичное создание перегрузки к качалке в плоскости симметрии блока управления путем вращения поворотного стола, контроль момента замыкания электрической цепи одним из концов качалки, а также изменение положения центров масс балансировочных элементов блока управления
Недостатком указанного способа является повышенная трудоемкость вследствие многочисленных регулировок зазоров между подвижным упором и каждым концом качалки, а также практической невозможности одновременного замыкания электрических цепей каждым концом качалки под действием перегрузки при обеспечении жесткости качалки и больших зазорах между концами качалки и упорами.
Задачей предложенного способа является установление и обеспечение требуемой точности регулировки дисбаланса.
Техническим результатом настоящего изобретения является уменьшение трудоемкости.
Технический результат достигается тем, что в предложенном способе балансировки блока управления РМ, включающем установку двух упоров на заданном расстоянии от плоскости симметрии блока управления РМ рулевой машины и соосно плунжерам РМ, подведение подвижных упоров до контакта с качалкой, контроль замыкания подвижным упором и каждым концом качалки электрической цепи, отвод упоров от качалки в направлении, параллельном оси плунжера РМ, и установку равных определенных зазоров между концами качалки и упорами, первичное создание перегрузки к качалке в плоскости симметрии блока управления путем вращения поворотного стола, контроль момента замыкания электрической цепи одним из концов качалки, а также изменение положения центров масс балансировочных элементов блока управления, в отличие от прототипа, в нем перед подведением двух подвижных упоров до контакта с качалкой определяют величину Δ перемещения точки пересечения оси плунжера РМ с качалкой, под действием управляющего сигнала, эквивалентного максимальному сигналу зоны нечувствительности РМ, после фиксации момента замыкания электрической цепи одним из концов качалки при перегрузке, определяют направление перемещения центров масс балансировочных элементов блока управления относительно концов качалки, после чего повторно создают перегрузку, под действием которой обеспечивают необходимое перемещение концов качалки в зоне контакта с подвижным упором, путем изменения положения центров масс балансировочных элементов блока управления, причем перемещение определяется соотношением:  , где
, где
К - максимальная величина перемещения конца качалки в сторону упора под действием перегрузки;
В - расстояние между осью подвижного упора и плоскостью симметрии блока управления РМ;
Δ - величина перемещения точки пересечения качалки с осью плунжера РМ, под действием управляющего сигнала, эквивалентного максимальному сигналу зоны нечувствительности РМ;
А - расстояние между осью плунжера РМ и плоскостью симметрии блока управления РМ.
При установке упоров на заданном расстоянии от плоскости симметрии блока управления РМ обеспечивают максимальное удлинение плеч качалки дополнительными накладками при сохранении жесткости конструкции.
Чертеж содержит общую конструктивную схему устройства для балансировки блока управления РМ.
Устройство для балансировки блока управления РМ включает поворотный стол 1 с осью вращения в точке О, на котором установлено основание 2 с радиальным смещением относительно точки О. На основании 2 закреплен блок управления РМ с совмещением собственной плоскости симметрии с радиусом поворотного стола, содержащий электромеханический преобразователь (ЭМП) 3, качалку 4. На качалке 4 установлено коромысло 5, закрепленное в отверстиях плеч качалки 4 элементами фиксации, например болтами 6 и гайками 7, масса каждой пары которых эквивалентна массе золотникового плунжера. Причем оси болтов 6 совпадают с осями золотниковых плунжеров. Качалка 4 нагружена плоской пружиной 8 и закреплена на валу ЭМП 3 посредством цангового зажима, выполненного в виде разрезной ступицы, края которой стянуты шпилькой 9 и контргайками 10, выполняющими роль балансировочных элементов. Вал ЭМП 3 установлен перпендикулярно поворотному столу 1, при этом упрощается конструкция основания и обеспечивается его расположение параллельно поворотному столу. При отключенном ЭМП качалка занимает нейтральное положение под действием пружины 8, при котором ее плоскость симметрии совпадает с плоскостью симметрии блока управления и радиусом ОА поворотного стола. Со стороны плеч качалки 4, противоположных оси вращения стола (точке О), на основании 2 на одинаковом расстоянии от плоскости симметрии блока управления установлены подвижные упоры, выполненные в виде микрометрических винтов 11 микрометрических головок 12, например по ГОСТ 6507-90, закрепленных относительно основания 2 скобами 13. Чтобы перегрузка действовала на плечи качалки равномерно, микрометрические винты 11 размещены параллельно плоскости симметрии блока управления и направлены к оси вращения поворотного стола 1, т.е. навстречу действию перегрузки. Каждый винт 11 присоединен к собственной электрической цепи, включающей коромысло 5, источник питания 14 и вольтметр 15, замыкающейся на качалку 4.
При приведении во вращение поворотного стола 1, на ЭМП 3, установленный на основании 2, действует перегрузка, пропорциональная числу оборотов поворотного стола 1 и смещению основания 2 относительно центра вращения О. В случае дисбаланса блока управления, качалка 4, закрепленная на валу ЭМП 3, под действием перегрузки, соответствующей реальной перегрузке, действующей на корпус РМ при ее эксплуатации в направлении плоскости симметрии блока управления перпендикулярно валу ЭМП 3, преодолевает усилие пружины 8 и поворачивается вместе с коромыслом 5 относительно ЭМП 3, замыкая электрическую цепь. Коромысло 5 закреплено на качалке 4 посредством болтов 6 и гаек 7, установленных в отверстиях плеч последней, вместо золотниковых плунжеров (замененных эквивалентной массой) и размещено симметрично относительно плоскости симметрии блока управления РМ, чтобы исключить влияние дисбаланса самого коромысла на балансировку блока управления РМ. Коромысло 5 обеспечивает максимальное удлинение плеч качалки 4 при сохранении жесткости конструкции для повышения точности балансировки. Момент замыкания электрической цепи от источника питания 14 контролируется по соответствующему вольтметру 15. Фиксация момента замыкания и замкнувшейся цепи позволяет определить направление перемещения центров масс балансировочных элементов блока управления относительно концов качалки 4 для ликвидации дисбаланса блока управления, после чего повторно создают перегрузку, под действием которой обеспечивают необходимое перемещение концов коромысла 5 в зоне контакта с подвижным упором, путем изменения положения центров масс балансировочных элементов блока управления, т.е. вращением смещают шпильку 9 в сторону болта 6, противоположного стороне качалки 4, удалившейся от центра вращения поворотного стола при действии перегрузки, или изменяют массу контргаек 10.
Способ балансировки блока управления РМ осуществляется следующим образом. Перед созданием перегрузки подводят микрометрический винт 11 микрометрической головки 12 до контакта с концами коромысла 5 и по вольтметрам 15 контролируют момент замыкания электрических цепей, затем вращением микрометрической головки 12 размыкают электрические цепи и устанавливают равные определенные зазоры между качалкой и каждым микрометрическим винтом 11. Микрометрические головки 12 устанавливают на одинаковом расстоянии от плоскости симметрии блока управления и зазоры выбирают равными для создания одинакового перемещения от усилия перегрузки на каждом плече качалки. Создают перегрузку к качалке 4 в плоскости симметрии блока управления РМ вращением поворотного стола 1. При отключенном ЭМП 3 контролируют момент замыкания электрических цепей каждого микрометрического винта 11 по соответствующему вольтметру 15, после фиксации момента замыкания электрической цепи одним из концов коромысла 5 при перегрузке определяют направление перемещения центров масс балансировочных элементов блока управления относительно концов качалки.
В каждой РМ, с учетом утечек рабочей жидкости по зазорам в золотниковом распределительном устройстве, наличия сил трения в исполнительном механизме и т.п., перемещение исполнительного органа начинается при определенном управляющем сигнале на блоке управления, определяемом зоной нечувствительности. Для определения требуемой точности балансировки определяют максимальный управляющий сигнал (например, ток управления на ЭМП), при котором происходит страгивание исполнительного органа из неподвижного положения. При подаче этого максимального управляющего сигнала на блок управления РМ происходит поворот вала ЭМП, а соответственно и качалки 4 на угол α. Принимая во внимание, что А - расстояние между осью плунжера РМ и плоскостью симметрии блока управления РМ, перемещение А точки пересечения качалки с осью плунжера РМ, под действием управляющего сигнала, эквивалентного максимальному сигналу зоны нечувствительности РМ, определяется соотношением:
Δ=A sin α, что для малых углов эквивалентно: Δ=А α.
Для повышения точности балансировки обеспечивают максимальное удлинение плеч качалки дополнительными накладками (например, коромыслом 5) при сохранении жесткости конструкции и соответствующее разнесение подвижных упоров. Учитывая, что В - расстояние между осью подвижного упора и плоскостью симметрии блока управления РМ всегда превышает А, перемещение К конца качалки с учетом длины установленного коромысла при повороте вала ЭМП на угол α определяется соотношением: К=В α, отсюда соответственно имеем:
 или
или 
После определения направления перемещения центров масс балансировочных элементов блока управления относительно концов качалки вращением микрометрической головки 12 устанавливают зазор  между коромыслом 5 и микрометрическим винтом 11, т.е. устанавливают максимальное перемещение концов качалки в зоне контакта с подвижным упором, после чего повторно создают перегрузку, под действием которой обеспечивают необходимое перемещение концов коромысла 5 в зоне контакта с подвижным упором, путем изменения положения центров масс балансировочных элементов блока управления, т.е. вращением смещают шпильку 9 в сторону болта 6, противоположного стороне качалки 4, удалившейся от центра вращения поворотного стола при действии перегрузки, или изменяют массу контргаек 10. Учитывая, что поворот вала ЭМП на угол в пределах угла α не влияет на чувствительность РМ, то перемещение конца качалки (с учетом коромысла) в зоне контакта с подвижным упором под действием перегрузки на величину
между коромыслом 5 и микрометрическим винтом 11, т.е. устанавливают максимальное перемещение концов качалки в зоне контакта с подвижным упором, после чего повторно создают перегрузку, под действием которой обеспечивают необходимое перемещение концов коромысла 5 в зоне контакта с подвижным упором, путем изменения положения центров масс балансировочных элементов блока управления, т.е. вращением смещают шпильку 9 в сторону болта 6, противоположного стороне качалки 4, удалившейся от центра вращения поворотного стола при действии перегрузки, или изменяют массу контргаек 10. Учитывая, что поворот вала ЭМП на угол в пределах угла α не влияет на чувствительность РМ, то перемещение конца качалки (с учетом коромысла) в зоне контакта с подвижным упором под действием перегрузки на величину  без замыкания контактной цепи обеспечивает допустимый дисбаланс, а соответственно, требуемую точность балансировки.
без замыкания контактной цепи обеспечивает допустимый дисбаланс, а соответственно, требуемую точность балансировки.
Установление и обеспечение требуемой точности балансировки уменьшает трудоемкость вследствие отсутствия многочисленных регулировок зазоров и положений центров масс балансировочных элементов блока управления. Максимальное удлинение плеч качалки дополнительными накладками при сохранении жесткости конструкции повышает точность балансировки.
Литература
1. Патент RU №2131580, F42В 10/00, 1998 г.
2. Патент RU №2292022, F42В 10/60, 2004 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ БЛОКА УПРАВЛЕНИЯ РУЛЕВОЙ МАШИНЫ | 2007 |
|
RU2351882C2 |
| УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ БЛОКА УПРАВЛЕНИЯ РУЛЕВОЙ МАШИНЫ И СПОСОБ БАЛАНСИРОВКИ БЛОКА УПРАВЛЕНИЯ РУЛЕВОЙ МАШИНЫ | 2004 |
|
RU2292022C2 |
| РУЛЕВАЯ МАШИНА И СПОСОБ СБОРКИ РУЛЕВОЙ МАШИНЫ | 1998 |
|
RU2131580C1 |
| РУЛЕВАЯ МАШИНА | 2007 |
|
RU2351883C2 |
| Измеритель выходных характеристик спиральных пружин | 2016 |
|
RU2623816C1 |
| НАГРУЗОЧНЫЙ СТЕНД ДЛЯ ИСПЫТАНИЙ РУЛЕВОЙ МАШИНЫ | 2015 |
|
RU2591121C1 |
| АВТОМАТИЗИРОВАННЫЙ ИЗМЕРИТЕЛЬ ВЫХОДНЫХ ХАРАКТЕРИСТИК СПИРАЛЬНЫХ ПРУЖИН | 2014 |
|
RU2586411C1 |
| СКВАЖИННО-НАСОСНАЯ УСТАНОВКА | 2012 |
|
RU2493433C1 |
| РУЛЕВАЯ МАШИНА | 1998 |
|
RU2131377C1 |
| САМОЛЁТ С ПЕРЕДНИМ ГОРИЗОНТАЛЬНЫМ ОПЕРЕНИЕМ | 2003 |
|
RU2243131C1 |
Изобретение относится к способам сборки устройств управления. Способ балансировки блока управления рулевой машины (РМ) включает установку двух упоров на заданном расстоянии от плоскости симметрии блока управления РМ и соосно плунжерам РМ, подведение подвижных упоров до контакта с качалкой, контроль замыкания подвижным упором и каждым концом качалки электрической цепи, отвод упоров от качалки в направлении, параллельном оси плунжера РМ, и установку равных определенных зазоров между концами качалки и упорами, первичное создание перегрузки к качалке в плоскости симметрии блока управления путем вращения поворотного стола, контроль момента замыкания электрической цепи одним из концов качалки, а также изменение положения центров масс балансировочных элементов блока управления. Перед подведением двух подвижных упоров до контакта с качалкой определяют величину перемещения точки пересечения оси плунжера РМ с качалкой под действием управляющего сигнала, эквивалентного максимальному сигналу зоны нечувствительности РМ, после фиксации момента замыкания электрической цепи одним из концов качалки при перегрузке определяют направление перемещения центров масс балансировочных элементов блока управления относительно концов качалки. После повторно создают перегрузку, под действием которой обеспечивают необходимое перемещение концов качалки в зоне контакта с подвижным упором, путем изменения положения центров масс балансировочных элементов блока управления. Уменьшается трудоемкость и повышается точность процесса балансировки. 1 з.п. ф-лы, 1 ил.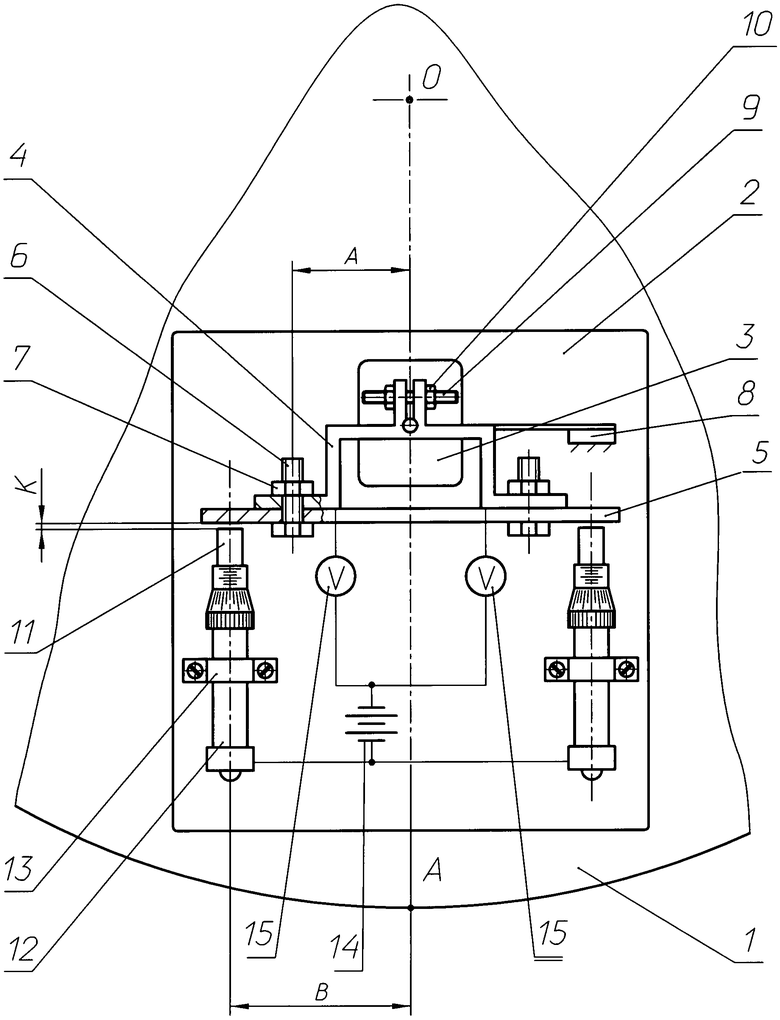
1. Способ балансировки блока управления рулевой машины, включающий установку двух упоров на заданном расстоянии от плоскости симметрии блока управления рулевой машины и соосно плунжерам рулевой машины, подведение подвижных упоров до контакта с качалкой, контроль замыкания подвижным упором и каждым концом качалки электрической цепи, отвод упоров от качалки в направлении, параллельном оси плунжера рулевой машины, и установку равных определенных зазоров между концами качалки и упорами, первичное создание перегрузки к качалке в плоскости симметрии блока управления путем вращения поворотного стола, контроль момента замыкания электрической цепи одним из концов качалки, а также изменение положения центров масс балансировочных элементов блока управления, отличающийся тем, что в нем перед подведением двух подвижных упоров до контакта с качалкой определяют величину Δ перемещения точки пересечения оси плунжера рулевой машины с качалкой под действием управляющего сигнала, эквивалентного максимальному сигналу зоны нечувствительности рулевой машины, после фиксации момента замыкания электрической цепи одним из концов качалки при перегрузке определяют направление перемещения центров масс балансировочных элементов блока управления относительно концов качалки, после чего повторно создают перегрузку, под действием которой обеспечивают необходимое перемещение концов качалки в зоне контакта с подвижным упором путем изменения положения центров масс балансировочных элементов блока управления, причем перемещение определяется соотношением
 ,
,
где К - максимальная величина перемещения конца качалки в сторону упора под действием перегрузки;
В - расстояние между осью подвижного упора и плоскостью симметрии блока управления рулевой машины;
Δ - величина перемещения точки пересечения качалки с осью плунжера рулевой машины под действием управляющего сигнала, эквивалентного максимальному сигналу зоны нечувствительности рулевой машины;
А - расстояние между осью плунжера рулевой машины и плоскостью симметрии блока управления рулевой машины.
2. Способ балансировки блока управления рулевой машины по п.1, отличающийся тем, что при установке упоров на заданном расстоянии от плоскости симметрии блока управления балансировки блока управления рулевой машины обеспечивают максимальное удлинение плеч качалки дополнительными накладками при сохранении жесткости конструкции.
| УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ БЛОКА УПРАВЛЕНИЯ РУЛЕВОЙ МАШИНЫ И СПОСОБ БАЛАНСИРОВКИ БЛОКА УПРАВЛЕНИЯ РУЛЕВОЙ МАШИНЫ | 2004 |
|
RU2292022C2 |
| РУЛЕВАЯ МАШИНА И СПОСОБ СБОРКИ РУЛЕВОЙ МАШИНЫ | 1998 |
|
RU2131580C1 |
| US 5393011 A, 28.02.1995. | |||

