Изобретение относится к области электротехники и может быть использовано в вибрационных и вибрационно-ударных устройствах, например, для художественно-декоративной обработки материалов путем направленного, программно-управляемого, разрушения их поверхностного слоя.
Автору неизвестны случаи использования шаговых двигателей с различными вариантами подключения их обмоток для возбуждения устойчивых вынужденных колебаний, поэтому при выборе наиболее близкого к предлагаемому изобретению аналога исходил из приведенных ниже сведений.
Среди способов реализации вибрационного движения наиболее перспективным с точки зрения надежности и управляемости является силовое возбуждение колебаний при помощи электромагнитного вибропривода.
Однако в настоящее время проблема разработки и управления электромагнитными двигателями, рабочий орган которых совершает вибрационное движение для переноса полутоновых изображений методом ударного разрушения, встала достаточно остро. Вызвано это тем, что существующие способы и электромагнитные виброприводы возбуждения колебаний рабочего органа ограниченно применимы и не могут быть широко использованы в связи с большими геометрическими размерами, массой, сложностью конструкции за счет использования вспомогательных устройств для удержания якоря на этапе трогания в период рабочего и холостого хода, небольшой удельной энергией удара, малым быстродействием.
Наиболее близким по технической сущности к предлагаемому изобретению аналогом является способ управления однообмоточным линейным электромагнитным двигателем ударного действия, в котором рабочий ход якоря осуществляется за счет единственной системы обмоток, а его возврат - под действием механического усилия, например, под действием усилия возвратной пружины, а для увеличения удельной энергии удара первый импульс напряжения подают в период рабочего хода якоря, а второй и последующие импульсы напряжения в период холостого хода с периодом не более суммарного времени рабочего и холостого хода, при этом импульс подают в момент времени, соответствующий воздушному зазору δвкл, при котором смена знака скорости якоря на противоположный происходит в точке с координатой положения якоря, равной начальному воздушному рабочему зазору δн, причем δвкл<δн. 2 ил. (Патент РФ №2127017, МПК 6 Н02К 33/02, опубл. 27.02.1999, бюл. №6, автор Угаров Г.Г., Нейман В.Ю., Усанов К.М.).
Однако данный способ управления ведет к увеличению линейных размеров, массы и усложнению конструкции, быстрому износу трущихся частей колебательной системы и низкому быстродействию, а в результате низкому качеству получаемого изображения на поверхности заготовки.
Техническая задача, на решение которой направлено заявляемое изобретение, состоит в создании способа управления шаговым двигателем (далее в тексте - ШД) в режиме вынужденных колебаний с повышенными удельной энергией удара и быстродействием, с минимальными потерями на трение, в повышении точности и качества изображения независимо от материала заготовки, а также производительности труда.
Указанная техническая задача решается тем, что в способе управления ШД в режиме вынужденных колебаний соединение фазовых обмоток ШД и управление осуществляется таким образом, чтобы обеспечить оптимальные режимы возбуждения возвратно-угловых колебаний ротора ШД по амплитуде и частоте с одновременным преобразованием в колебательное движение ударного инструмента, а обратная связь по углу поворота ротора ШД, являющаяся механической или комбинацией механической и электрической, реализована при помощи рычажно-пружинного механизма, соединяющего вал ШД с его неподвижным корпусом через блок пружин, степень натяжения которых регулируется с помощью регулировочных винтов.
Осуществление предлагаемого способа основано на двух принципиальных положениях.
Во-первых, непосредственным источником программно управляемых квазипериодических колебаний подвижной механической системы является серийно выпускаемый промышленностью ШД, коммутация фазовых обмоток которого отличается от ранее известных штатных вариантов, применяемых при управлении этими двигателями.
Во-вторых, ШД охвачен по углу отклонения его ротора механической и электрической отрицательной обратной связью.
Сущность изобретения заключается в том, что для совершения прямого рабочего хода инструмента с удельной энергией удара, направленного на точечное программно-управляемое разрушение поверхности заготовки, в каждом периоде управления в статоре шагового двигателя формируется пульсирующий магнитный поток, согласно первому варианту, с помощью одной фазовой обмотки, например, АВ, где в точку А обмотки поступает из управляющего устройства квазипериодическая последовательность импульсов с заданной частотой и длительностью, точку В подключают к общей массе, а для совершения обратного холостого хода используется только усилие деформации блока пружин рычажно-пружинного механизма с установленным на одном конце механизма ударным инструментом.
По второму варианту для совершения прямого рабочего хода инструмента с удельной энергией удара, направленного на точечное программно-управляемое разрушение поверхности заготовки, в статоре ШД в каждом периоде управления формируется пульсирующий магнитный поток с помощью одной фазовой обмотки, например, АВ, где в точку А обмотки поступает из управляющего устройства квазипериодическая последовательность импульсов с заданной частотой и длительностью, точки В обмотки АВ и С фазовой обмотки СД подключают на общую массу, а при совершении обратного холостого хода инструмента, вызванного силами упругости деформированных пружин, точку С фазовой обмотки СД и точку А фазовой обмотки АВ подключают на общую массу, а в точку В фазовой обмотки АВ и в точку Д фазовой обмотки СД подают импульсы напряжения, под действием которых в цепи обмоток АВ и СД начинают протекать токи, создающие момент вращения ротора, совпадающий по направлению с моментом, создаваемым пружинами, чем обеспечивается уменьшение времени холостого хода инструмента, а следовательно, и быстродействие работы всей системы.
По третьему варианту, для совершения прямого рабочего хода инструмента с удельной энергией удара, направленного на точечное программно-управляемое разрушение поверхности заготовки, в статоре ШД формируется пульсирующий магнитный поток с помощью обеих фазовых обмоток АВ и СД, где в точки А и С одновременно поступают из управляющего устройства квазипериодическая последовательность импульсов с заданной частотой tAi fCi и длительностью τAi, τCi, соответственно, причем в частном случае fAi=fCi и τAi=τCi, точки В и Д подключают на общую массу, а для совершения обратного холостого хода используется только усилие пружин рычажно-пружинного механизма с установленным на одном плече рычага ударным инструментом.
По четвертому варианту, для совершения прямого рабочего хода инструмента с удельной энергией удара, направленного на точечное программно-управляемое разрушение поверхности заготовки, в статоре ШД формируется пульсирующий магнитный поток с помощью обеих фазовых обмоток АВ и СД, где в точки А и С одновременно поступают из управляющего устройства квазипериодические последовательности импульсов с заданной частотой fAi, fCi и длительностью τAi, τCi, соответственно, точки В и Д подключают на общую массу, а при совершении обратного холостого хода точку С фазовой обмотки СД и точку А фазовой обмотки АВ подключают на общую массу, а в точку В фазовой обмотки АВ и в точку Д фазовой обмотки СД подают импульсы напряжения, под действием которых в цепи обмоток АВ и СД начинают протекать токи, создающие момент вращения ротора, совпадающий по направлению с моментом, создаваемым пружинами, чем обеспечивается уменьшения времени холостого хода и увеличение быстродействия всей системы.
В частном случае, во втором и четвертом вариантах, при совершении обратного холостого хода для управления может быть задействована только одна из фазовых обмоток АВ или СД.
Для всех вариантов начальное угловое положение равновесия оси зубца ротора относительно оси зубца статора устанавливается с помощью регулировочных винтов путем натяжения пружин рычажно-пружинного механизма и контролируется визуально или автоматически с помощью датчика углового положения ротора.
Для раскрытия сущности изобретения приведем некоторые сведения об устройстве и функционировании ШД, а также их особенности.
Существуют три основных типа ШД:
- двигатели с переменным магнитным сопротивлением,
- двигатели с постоянным магнитным сопротивлением,
- гибридные двигатели.
Большинство современных ШД являются гибридными. По сути, гибридные двигатели являются усовершенствованием двигателей с постоянными магнитами, но с большим числом полюсов, сочетают в себе лучшие черты двух предыдущих типов двигателей и по способу управления ничем от них не отличаются. Поэтому в данном изобретении для описания способа будем рассматривать только гибридные ШД. В гибридном ШД вращающий момент создается магнитными потоками статора и ротора, которые соответствующим образом ориентированы друг относительно друга. Статор изготовлен из материала с высокой магнитной проницаемостью и имеет несколько полюсов. Полюс можно определить как некоторую область намагниченного тела, в которой сконцентрировано магнитное поле. Полюса имеют как статор, так и ротор. Вращающий момент пропорционален величине магнитного поля и, соответственно, току в обмотке и количеству витков. Таким образом, вращающий момент зависит от параметров обмоток. Если хотя бы одна обмотка ШД запитана, ротор принимает определенное положение. Он будет находиться в этом положении до тех пор, пока внешний приложенный момент не превысит некоторого значения, называемого моментом удержания. После этого ротор повернется и будет стараться принять одно из следующих положений равновесия. В общем случае зависимость между числом полюсов ротора, числом эквивалентных полюсов статора и числом фаз определяет угол шага S двигателя:

где Nph - число эквивалентных полюсов на фазу, равное числу полюсов ротора;
Ph - число фаз;
N - полное количество полюсов для всех фаз вместе.
Чаще всего на практике ротор двигателя имеет 100 полюсов, т.е. 50 пар, двигатель имеет 2 фазы, поэтому полное количество полюсов - 200, а шаг соответственно 1,8°.
В зависимости от конфигурации обмоток двигатели делятся на биполярные и униполярные.
Биполярный двигатель имеет две обмотки - по одной обмотке на каждую фазу - и соответственно четыре вывода А, В, С и Д.
Униполярный двигатель также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов. Иногда униполярные двигатели имеют раздельные 4 обмотки.
Каждая обмотка имеет отдельные выводы, поэтому всего 8 выводов. При соответствующем соединении обмоток такой двигатель можно использовать как униполярный или как биполярный. Поскольку на каждую фазу мы имеем две обмотки, то от порядка их соединения будут зависеть частотные, скоростные и силовые свойства полученной системы.
В данном изобретении для описания сущности предлагаемого способа рассматривается простейший гибридный двухфазный ШД с фазовыми обмотками АВ и СД и с двумя парами полюсов.
На фиг.1 представлена функциональная схема двухполюсного ШД с рычажно-пружинным механизмом и рабочим инструментом.
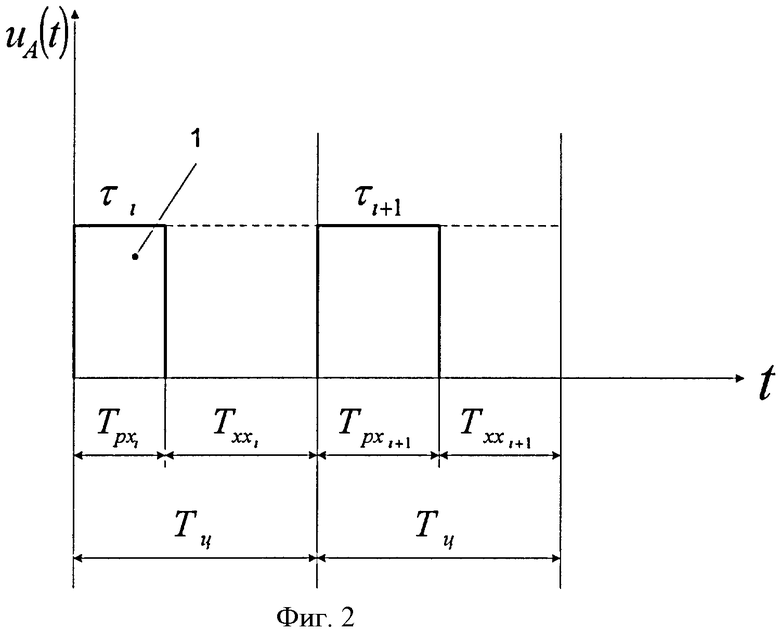
На фиг.2 приведен график сигнала управления, поступающего на фазовые обмотки ШД.
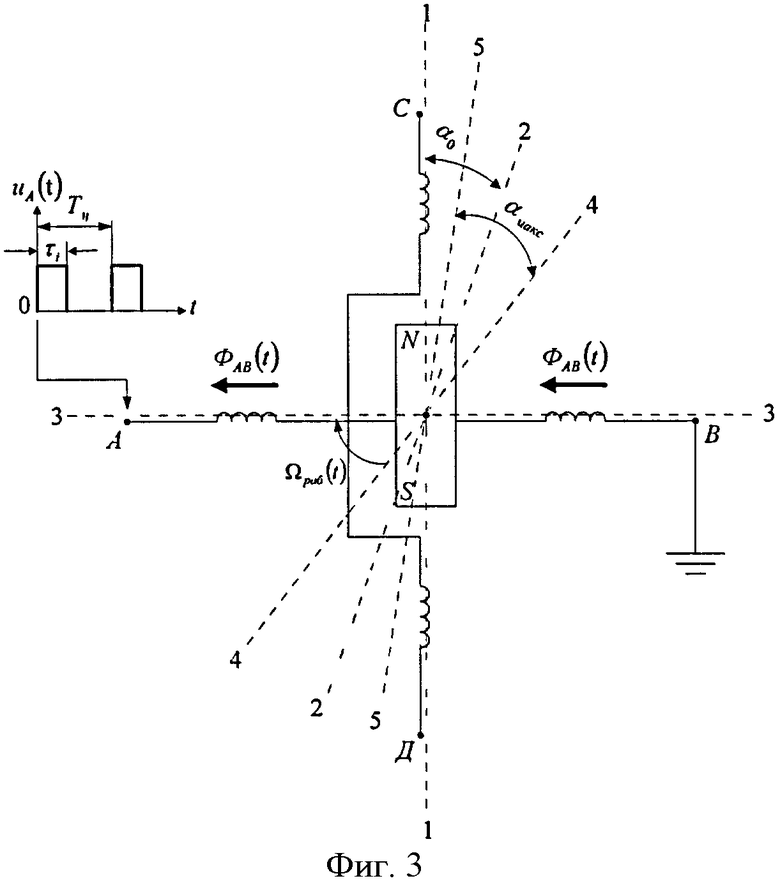
На фиг.3 приведена схема подключения фазовых обмоток по первому варианту.
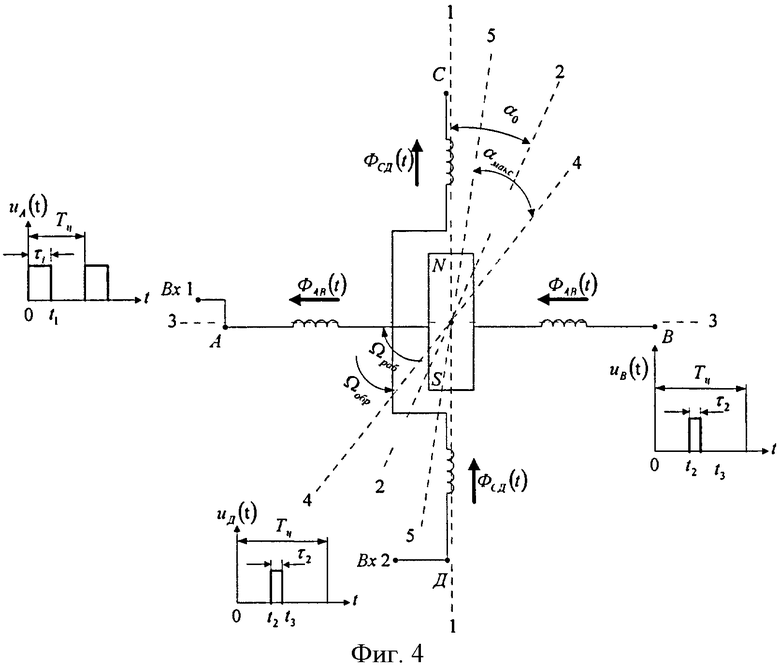
На фиг.4 приведена схема подключения фазовых обмоток по второму варианту.
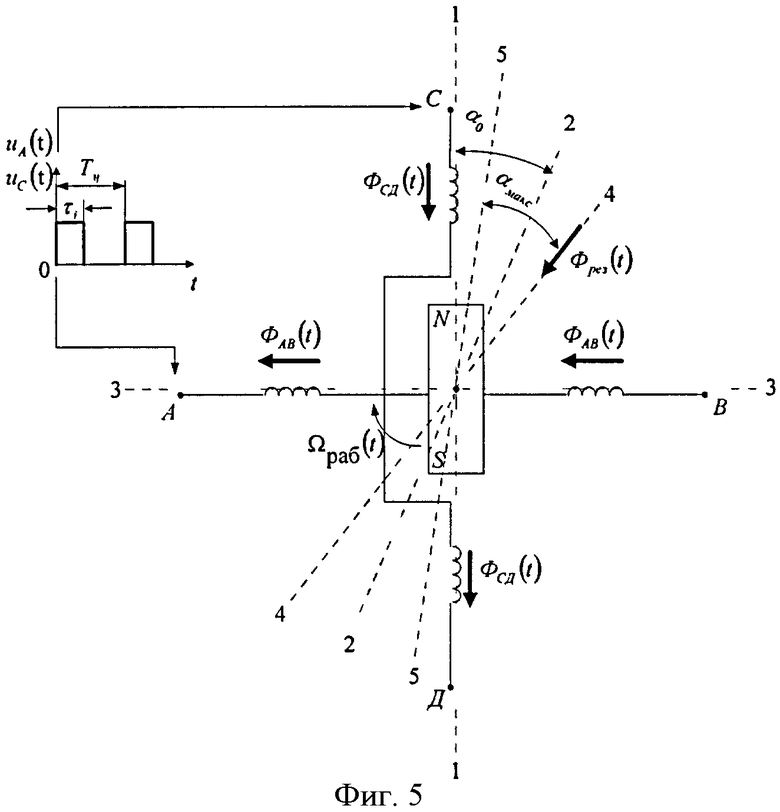
На фиг.5 приведена схема подключения фазовых обмоток по третьему варианту.
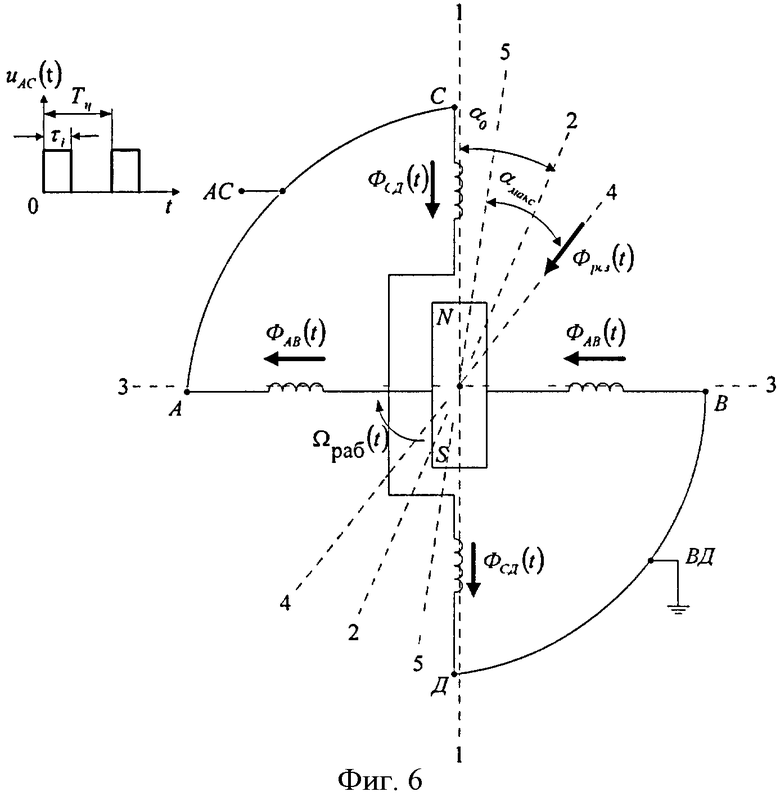
На фиг.6 приведена схема подключения фазовых обмоток по третьему варианту, частный случай.
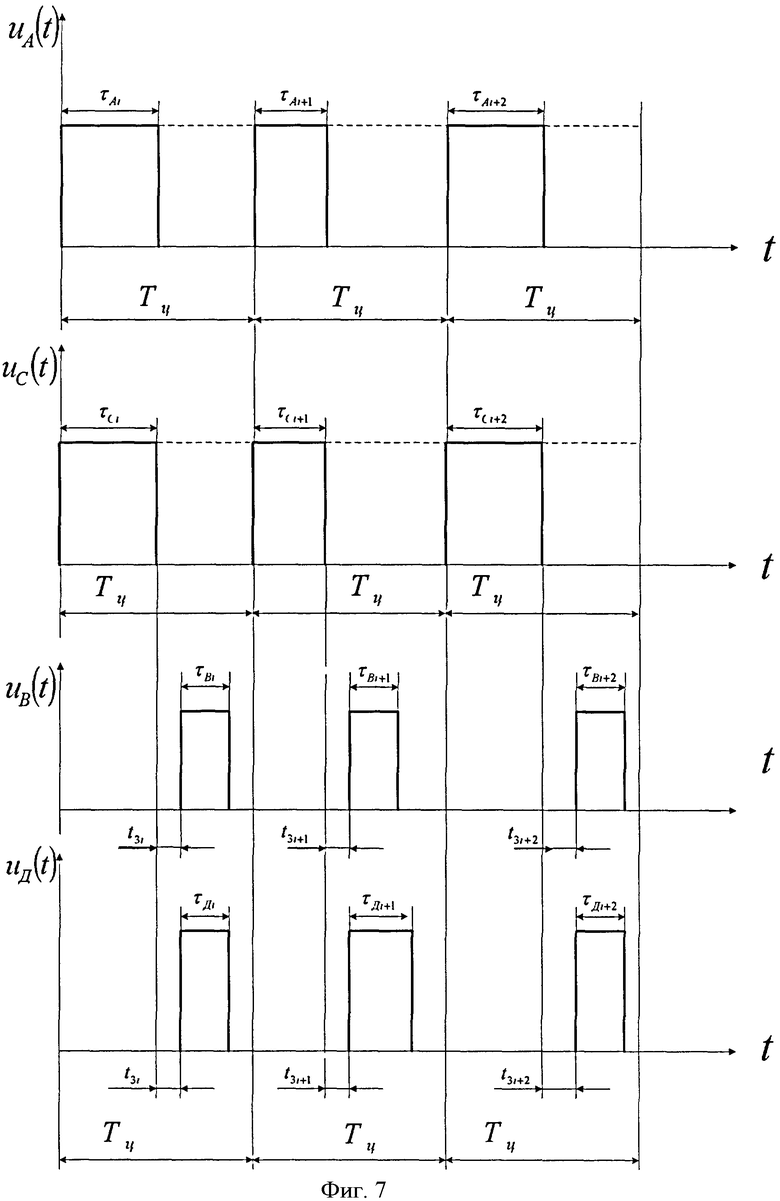
На фиг.7 приведены временные диаграммы сигналов управления для четвертого варианта.
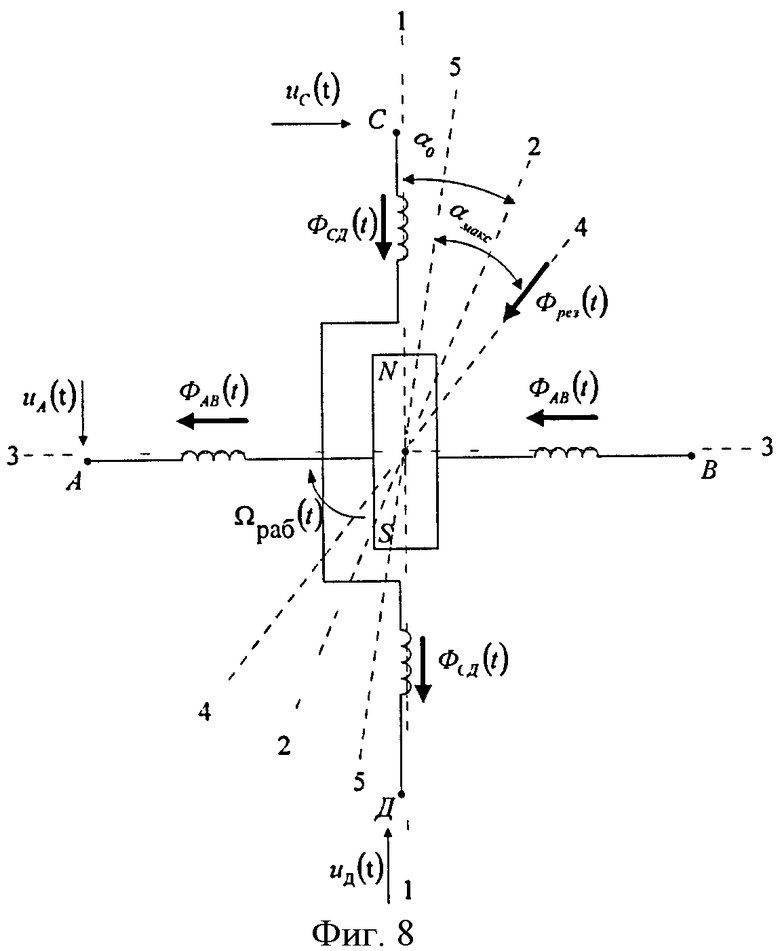
На фиг.8 приведена схема подключения фазовых обмоток по четвертому варианту.
Заявленный способ осуществляется следующим образом.
В начальный момент времени, когда сигнал управления отсутствует, ротор 27 ШД (Фиг.1) занимает равновесное положение 2-2 благодаря усилию пружин 7, 8. Положение 2-2 соответствует случаю, когда ось зубца 11 ротора 27 повернута относительно оси 1-1 зубца 13 статора 14 на угол α0, обеспечивающий максимальный размах колебаний ударного инструмента 21. Установка требуемого значения угла α0 осуществляется с помощью регулировочных винтов 25, 26 путем натяжения пружин 7, 8, связанных через рычаг 18 с валом 17 ШД. Управление винтами осуществляется вручную или автоматически с помощью приборной следящей системы 24. Контроль за величиной угла α0 осуществляется визуально или с помощью датчика углового положения 28 ротора ШД. В случае использования униполярного ШД с 5 или 6 выводами контроль за величиной α0 осуществляется путем измерения текущего напряжения на неиспользуемом для управления ШД выводе визуально с помощью измерителя напряжения или автоматически с помощью АЦП и микропроцессорной системы. В частном случае минимуму напряжения соответствует максимум размаха колебания инструмента при одних и тех же значениях амплитуды и частоты следования импульсов.
Амплитуда и частота колебаний ударного инструмента 21 зависят от начальной длины натяжения и жесткости пружин, а также геометрических характеристик рычажно-пружинного механизма. В момент включения сигналы управления в виде последовательности квазипериодических электрических импульсов 1 (фиг.2) любой заданной формы, например, прямоугольных, с периодом Тц и длительностью τi, где i - текущее значение длительности импульса, поступают из блока управления, на фиг.1 не показан, на фазовые обмотки 15 и 16 шагового двигателя. Период Тц назовем циклом сигнала управления.
Сигнал управления возбуждает электромагнитное поле в статоре 14 шагового двигателя через фазовые обмотки 15, 16. Одновременно с электромагнитной силой на ротор 27 действуют противоположно направленные силы трения в ШД и силы упругости пружин 7, 8, благодаря чему в механической системе ШД кратковременно сохраняется равновесие и ротор остается неподвижным на время t0. С нарастанием тока в фазовой обмотке ротор под действием этой электромагнитной силы начинает поворачиваться вокруг своей оси, преодолевая противодействие сил трения и упругости пружин. Вал 17 ротора 27 приводит в движение жестко с ним связанный рычажно-пружинный механизм, который состоит из коромысла 10 с ударным инструментом 21 и рычагом 18, а также из пружин 7, 8. Угловое движение коромысла 10 относительно оси вращения ротора 27 ограничено действием пружин 7, 8, которые связывают коромысло 10 через рычаг 18 с корпусом 5, жестко посаженным на корпус 29 ШД. Коромысло 10 устанавливается жестко на вал 17 ШД таким образом, что ось коромысла 19 составляет с горизонтальной осью 3-3 угол γ>0, достигающий при контакте с поверхностью значения γ=0, обеспечивая, следовательно, прямой угол в момент удара инструмента 21 о поверхность 23 и оптимального ее разрушения 22 (фиг.1).
Под действием импульса управления длительностью τi ротор поворачивается на угол αрабi. Назовем эту часть цикла управления интервалом рабочего хода Трх (фиг.2). После поворота ротора на угол αраб1, в зависимости от вариантов управления, фазовые обмотки 15, 16 обесточиваются или производится изменение порядка чередования включения этих обмоток таким образом, что ротор ШД под действием упругих сил пружин и момента управления, если это требует алгоритм управления, начинает ход в обратном направлении. С этого момента начинается вторая часть цикла управления, называемая интервалом холостого хода Тхх (фиг.2), и завершается к началу поступления нового сигнала управления. Для подачи импульсов сигнала управления используются данные, поступающие от датчика 28 углового положения вала ШД. В зависимости от этих данных определяются значения задержек t3i, (фиг.7) между импульсами в пределах одного цикла управления Тц сигнала и значения задержек между последовательными сигналами управления. Таким образом, вращательные движения ротора 27 серийного шагового двигателя преобразуются в вынужденные колебательные движения ротора.
Возможны следующие варианты реализации заявленного способа.
Согласно первому варианту (фиг.3) для совершения прямого рабочего хода, Трх, инструмента с удельной энергией удара E1, направленного на точечное программно-управляемое разрушение поверхности заготовки, в каждом периоде управления в статоре ШД формируется пульсирующий магнитный поток ФАВ(t) с помощью одной фазовой обмотки, например, АВ, где в точку А обмотки поступает из управляющего устройства квазипериодическая последорательность импульсов uA(t) с заданными периодом следования Тц и длительностью τi точку В подключают к общей массе, а для совершения обратного холостого хода используют только усилие пружин в виде обратной механической связи рычажно-пружинного механизма с установленным на одном плече рычага ударным инструментом. Как показано на фиг.3, обмотка СД отключена, вертикальной составляющей магнитного потока можно пренебречь из-за малости ее величины, в результате суммарный магнитный поток ФАВ(t) пульсирует в направлении оси 3-3, амплитуда угла αмакс отклонения ротора ШД ограничена направлением 5-5 и направлением 4-4, которое соответствует нулевому разностному моменту на валу ШД. Значение энергии удара E1 определяется значением угловой скорости Ωраб(t) рычажно-пружинного механизма с ударным инструментом, которая приобретается в результате его разгона и является оптимальной для данной системы подключения из-за действия только лишь одной горизонтальной составляющей вектора пульсирующего момента ФАВ(t).
Первый вариант не исключает подачи новых импульсов управления на фазовые обмотки в пределах текущего цикла управления дополнительно к основному в случае, если это требует алгоритм управления.
Преимуществом данного варианта является простота его реализации, а недостатком - низкое значение удельной энергии удара E1 из-за использования для управления только одной фазовой обмотки ШД.
Согласно второму варианту (фиг.4) для совершения прямого рабочего хода, Трх, инструмента с удельной энергией удара Е2, направленного на точечное программно-управляемое разрушение поверхности заготовки, в статоре ШД формируется пульсирующий магнитный поток ФАВ(t) с помощью одной фазовой обмотки, например, АВ, где в точку А обмотки поступает из управляющего устройства квазипериодическая последовательность импульсов uA(t) с заданными периодом следования Тц и длительностью τi точку В фазовой обмотки АВ и точку Д фазовой обмотки СД подключают на общую массу. При совершении обратного холостого хода, Тхх, под действием упругих сил деформации пружин точку С фазовой обмотки СД и точку А фазовой обмотки АВ подключают на общую массу, а в точку Д фазовой обмотки СД и точку В фазовой обмотки АВ подают импульсы τ2 напряжения uД(t) и uВ(t), соответственно, под действием которых в статоре ШД формируются пульсирующие магнитные потоки ФСД(t) и ФАВ(t), в цепи обмоток АВ и СД начинают протекать токи, создающие момент вращения для холостого хода ротора, совпадающий по направлению с моментом, создаваемым пружинами, чем обеспечивается уменьшение времени холостого хода инструмента, а следовательно, и быстродействие Ωобр+Ωраб работы всей системы, где Ωобр - скорость холостого хода инструмента.
В частном случае, во втором варианте, при совершении обратного холостого хода для управления может быть задействована только одна из фазовых обмоток АВ или СД.
Второй вариант не исключает подачи новых импульсов управления на фазовые обмотки в пределах текущего цикла управления дополнительно к основному в случае, если это требует алгоритм управления.
Недостатком является меньшая удельная энергия удара E2, преимущество
- увеличение быстродействия системы и производительности труда по сравнению с первым вариантом.
Согласно третьему варианту (фиг.5) для совершения прямого рабочего хода, Трх, инструмента с удельной энергией удара Е3, направленного на точечное программно-управляемое разрушение поверхности заготовки, в статоре ШД формируются пульсирующие магнитные потоки ФАВ(t) и ФСД(t) с помощью обеих фазовых обмоток АВ и СД, где в точки А и С поступают из управляющего устройства квазипериодические последовательности импульсов с заданной частотой fAi fCi и длительностью τAi, τCi, соответственно, причем в частном случае fAi=fCi и τAi=τCi точки В и Д подключают к общей массе, а для совершения обратного холостого хода, Тхх, используется только усилие пружин, в виде обратной механической связи рычажно-пружинного механизма с установленным на одном плече рычага ударным инструментом. Как показано на фиг.5, пульсирующий магнитный поток в этом случае формируется двумя фазовыми обмотками АВ и СД, результирующий магнитный поток Фрез(t) имеет горизонтальную ФАВ(t) и вертикальную ФСД(t) составляющие и пульсирует в направлении 4-4. В частном случае реализации данного варианта концы фазовых обмоток АВ и СД могут быть соединены между собой аппаратно (фиг.6), что упрощает реализацию данного варианта.
Третий вариант не исключает подачи новых импульсов управления на фазовые обмотки в пределах текущего цикла дополнительно к основному в случае, если это требует алгоритм управления.
Преимуществом данного варианта является увеличение удельной энергии удара Е3 примерно на 40% в отличие от первого и второго вариантов.
Согласно четвертому варианту (фиг.8) для совершения прямого рабочего хода, Трх, инструмента с удельной энергией удара Е4, направленного на точечное программно-управляемое разрушение поверхности заготовки, в статоре ШД формируется пульсирующий магнитный поток с помощью обеих фазовых обмоток АВ и СД, где в точки А и С поступают из управляющего устройства квазипериодические последовательности импульсов uA(t) и uC(t) (фиг.7) с заданным периодом Тц и длительностью τAi τCi, соответственно, точки В и Д подключают к общей массе, а при совершении обратного холостого хода, Тхх, точку С фазовой обмотки СД и точку А фазовой обмотки АВ подключают на общую массу, а в точку Д фазовой обмотки СД и точку В фазовой обмотки АВ подают импульсы τ2 напряжения uД(t) и uB(t), соответственно, под действием которых в цепи обмоток АВ и СД начинают протекать токи, создающие момент вращения для холостого хода ротора, совпадающий по направлению с моментом, создаваемым пружинами.
В частном случае, в четвертом варианте, при совершении обратного холостого хода для управления может быть задействована только одна из фазовых обмоток АВ или СД.
Четвертый вариант не исключает подачи новых импульсов управления на фазовые обмотки в пределах текущего цикла дополнительно к основному в случае, если это требует алгоритм управления.
Преимуществом четвертого варианта является увеличение быстродействия системы и производительности труда по сравнению с предыдущими тремя вариантами.
При подаче сигнала управления во всех вариантах учитывается текущее угловое положение вала ШД. Для определения оптимального начального момента времени подачи управляющих импульсов во всех вариантах используются данные, поступающие от датчика 28 углового положения (фиг.1) вала ШД.
Изобретение относится к области электротехники и может быть использовано в устройствах вибрационного и ударного действия, в том числе для художественно-декоративной обработки материалов, получения изображения на твердом материале путем направленного разрушения поверхностного слоя. Техническим результатом является повышение удельной энергией удара и быстродействия с минимальными потерями на трение, повышение качества и точности наносимого изображения независимо от материала заготовки, производительности труда и уменьшение трудоемкости и себестоимости изготовления. В способе управления шаговым двигателем (ШД) прямой рабочий ход ударного инструмента с заданной удельной энергией удара в статоре ШД по первому варианту обеспечивают пульсирующим магнитным потоком с помощью одной фазовой обмотки ШД. Обратный холостой ход обеспечивают деформацией пружин рычажно-пружинного механизма с установленным на одном плече рычага ударным инструментом. По второму варианту для формирования пульсирующего магнитного потока в ШД используют обе фазовые обмотки. Для прямого рабочего хода управляющие импульсы подают на одну фазовую обмотку, а для обратного холостого хода управляющие импульсы подают на одну или обе фазовые обмотки так, чтобы направление создаваемого момента вращения ротора совпадало с направлением свободного движения деформированных пружин. По третьему варианту для прямого рабочего хода в статоре ШД формируют пульсирующий магнитный поток с помощью обеих фазовых обмоток. Обратный холостой ход обеспечивают усилием пружин рычажно-пружинного механизма с установленным на одном плече рычага ударным инструментом. По четвертому варианту для прямого рабочего хода инструмента в статоре ШД формируют пульсирующий магнитный поток с помощью обеих фазовых обмоток АВ и СД, при этом в точки А и С одновременно подают квазипериодические последовательности импульсов с заданной частотой и длительностью. Точки В и Д подключают к общей массе. Для обратного холостого хода управляющие импульсы подают на одну или обе фазовые обмотки так, чтобы направление создаваемого момента вращения ротора совпадало с направлением свободного движения деформированных пружин. 4 н. и 8 з.п. ф-лы; 8 ил.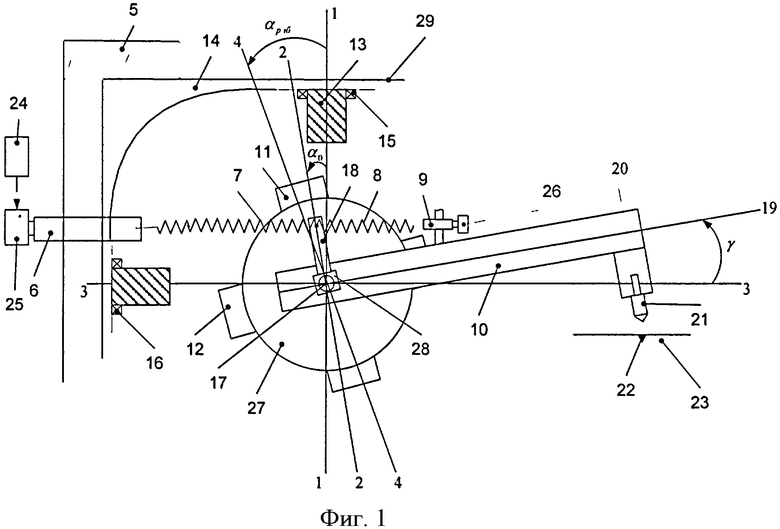
1. Способ управления шаговым двигателем в режиме вынужденных колебаний, образованный посредством установки рабочего органа на упругом механизме с возможностью перемещения рабочего органа под действием импульса силы, заключающийся в том, что в статоре двигателя формируется пульсирующий магнитный поток посредством подачи на обмотку из управляющего устройства последовательности импульсов для перемещения рабочего органа под действием магнитодвижущей силы при одновременном деформировании упругого механизма, необходимого для перемещения рабочего органа в обратном направлении под действием силы упругости, отличающийся тем, что для совершения прямого рабочего хода ударного инструмента с заданной удельной энергией удара в каждом цикле управления в статоре шагового двигателя формируется пульсирующий магнитный поток с помощью одной фазовой обмотки, например, АВ, где в точку А обмотки поступает из управляющего устройства квазипериодическая последовательность импульсов заданной частоты и длительности, точку В обмотки подключают к общей массе, а для совершения обратного холостого хода используют только усилие деформации пружин рычажно-пружинного механизма с установленным на одном конце ударным инструментом.
2. Способ по п.1, отличающийся тем, что начальное равновесное положение ротора относительно статора шагового двигателя задают с помощью натяжения пружин рычажно-пружинного механизма таким образом, чтобы полный размах колебания инструмента от крайней верхней точки до крайней нижней точки при подачи на фазовую обмотку управляющих импульсов заданной частоты и длительности был максимальным, а измерение величины размаха осуществляют визуально или автоматически с помощью датчика углового положения ротора шагового двигателя.
3. Способ по п.2, отличающийся тем, что натяжение пружин при установке начального равновесного положения ротора относительно статора шагового двигателя осуществляют с помощью регулировочных винтов вручную или автоматически с помощью следящего электропривода, вал которого связан с пружинами.
4. Способ управления шаговым двигателем в режиме вынужденных колебаний, образованный посредством установки рабочего органа на упругом механизме с возможностью перемещения рабочего органа под действием импульса силы, заключающийся в том, что в статоре двигателя формируется пульсирующий магнитный поток посредством подачи на обмотку из управляющего устройства последовательности импульсов для перемещения рабочего органа под действием магнитодвижущей силы при одновременном деформировании упругого механизма, необходимого для перемещения рабочего органа в обратном направлении под действием силы упругости, отличающийся тем, что для совершения прямого рабочего хода ударного инструмента с заданной удельной энергией удара в каждом цикле управления в статоре шагового двигателя формируется пульсирующий магнитный поток с помощью только одной фазовой обмотки, например, АВ, где в точку А обмотки поступает из управляющего устройства квазипериодическая последовательность импульсов заданной частоты и длительности, точки В и Д фазовых обмоток АВ и СД соответственно подключают на общую массу, а при совершении обратного холостого хода под действием механического усилия возвратных пружин точку С фазовой обмотки СД и точку А фазовой обмотки АВ подключают на общую массу, а в точку В фазовой обмотки АВ и в точку Д фазовой обмотки СД подают импульсы напряжения путем изменения порядка чередования коммутации фазовых обмоток, под действием которых в цепи обмоток АВ и СД начинают протекать токи, создающие момент вращения ротора, совпадающий по направлению с моментом, создаваемым пружинами.
5. Способ по п.4, отличающийся тем, что начальное равновесное положение ротора относительно статора шагового двигателя задают с помощью натяжения пружин рычажно-пружинного механизма таким образом, чтобы полный размах колебания инструмента от крайней верхней точки до крайней нижней точки при подаче на фазовую обмотку управляющих импульсов заданной частоты и длительности был максимальным, а измерение величины размаха осуществляют визуально или автоматически с помощью датчика углового положения ротора шагового двигателя.
6. Способ по п.5, отличающийся тем, что натяжение пружин при установке начального равновесного положения ротора относительно статора шагового двигателя осуществляют за счет регулировочных винтов вручную или автоматически с помощью следящего электропривода, вал которого связан с пружинами.
7. Способ управления шаговым двигателем в режиме вынужденных колебаний, образованный посредством установки рабочего органа на упругом механизме с возможностью перемещения рабочего органа под действием импульса силы, заключающийся в том, что в статоре двигателя формируется пульсирующий магнитный поток посредством подачи на обмотку из управляющего устройства последовательности импульсов для перемещения рабочего органа под действием магнитодвижущей силы при одновременном деформировании упругого механизма, необходимого для перемещения рабочего органа в обратном направлении под действием силы упругости, отличающийся тем, что для совершения прямого рабочего хода ударного инструмента с заданной удельной энергией удара в каждом цикле управления в cтаторе шагового двигателя формируется пульсирующий магнитный поток с помощью обеих фазовых обмоток АВ и СД, где в точки А и С одновременно поступают из управляющего устройства квазипериодические последовательности импульсов заданной частоты и длительности, точки В и Д подключают к общей массе, а для совершения обратного холостого хода используют только усилие деформации пружин рычажно-пружинного механизма с установленным на одном конце ударным инструментом.
8. Способ по п.7, отличающийся тем, что начальное равновесное положение ротора относительно статора шагового двигателя задают с помощью натяжения пружин рычажно-пружинного механизма таким образом, чтобы полный размах колебания инструмента от крайней верхней точки до крайней нижней точки при подаче на фазовую обмотку управляющих импульсов заданной частоты и длительности был максимальным, а измерение величины размаха осуществляют визуально или автоматически с помощью датчика углового положения ротора шагового двигателя.
9. Способ по п.8, отличающийся тем, что натяжение пружин при установке начального равновесного положения ротора относительно статора шагового двигателя осуществляют с помощью регулировочных винтов вручную или автоматически с помощью следящего электропривода, вал которого связан с пружинами.
10. Способ управления шаговым двигателем в режиме вынужденных колебаний, образованный посредством установки рабочего органа на упругом механизме с возможностью перемещения рабочего органа под действием импульса силы, заключающийся в том, что в статоре двигателя формируется пульсирующий магнитный поток посредством подачи на обмотку из управляющего устройства последовательности импульсов для перемещения рабочего органа под действием магнитодвижущей силы при одновременной деформации упругого механизма, необходимого для перемещения рабочего органа в обратном направлении под действием силы упругости, отличающийся тем, что для совершения прямого рабочего хода ударного инструмента с заданной удельной энергией удара в каждом цикле управления в статоре шагового двигателя формируется пульсирующий магнитный поток с помощью обеих фазовых обмоток АВ и СД, где в точки А и С одновременно поступают из управляющего устройства квазипериодические последовательности импульсов заданной частоты и длительности, точки В и Д подключают к общей массе, а при совершении обратного холостого хода точку С фазовой обмотки СД и точку А фазовой обмотки АВ подключают на общую массу, а в точку В фазовой обмотки АВ и в точку Д фазовой обмотки СД подают импульсы напряжения путем изменения порядка чередования коммутации фазовых обмоток, под действием которых в цепи обмоток АВ и СД начинают протекать токи, создающие момент вращения ротора, совпадающий по направлению с моментом, создаваемым пружинами.
11. Способ по п.10, отличающийся тем, что начальное равновесное положение ротора относительно статора шагового двигателя задают с помощью натяжения пружин рычажно-пружинного механизма таким образом, чтобы полный размах колебания инструмента от крайней верхней точки до крайней нижней точки при подаче на фазовую обмотку управляющих импульсов заданной частоты и длительности был максимальным, а измерение величины размаха осуществляют визуально или автоматически с помощью датчика углового положения ротора шагового двигателя.
12. Способ по п.11, отличающийся тем, что натяжение пружин при установке начального равновесного положения ротора относительно статора шагового двигателя осуществляют с помощью регулировочных винтов вручную или автоматически с помощью следящего электропривода, вал которого связан с пружинами.
| СПОСОБ УПРАВЛЕНИЯ ОДНООБМОТОЧНЫМ ЛИНЕЙНЫМ ЭЛЕКТРОМАГНИТНЫМ ДВИГАТЕЛЕМ УДАРНОГО ДЕЙСТВИЯ | 1995 |
|
RU2127017C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 2003 |
|
RU2231897C1 |
| ЭЛЕКТРИЧЕСКАЯ УДАРНАЯ МАШИНА | 1991 |
|
RU2009873C1 |
| Электромагнитный вибратор | 1982 |
|
SU1040573A1 |
| Запоминающее устройство | 1987 |
|
SU1425693A1 |
| US 4795929 A, 03.01 | |||
| Механизм для сообщения поршню рабочего цилиндра возвратно-поступательного движения | 1918 |
|
SU1989A1 |
| НАВОДЯЩЕЕ УСТРОЙСТВО ДЛЯ ИЗВЛЕЧЕНИЯ БОКОВЫХ ОТРАЖАТЕЛЕЙ | 2014 |
|
RU2581100C1 |
| DE 3731244 A1, 30.03.1989 | |||
| Гидрозатвор | 1982 |
|
SU1111137A1 |
| WО 2005027154 А2, 24.03.2005. | |||

