Область техники, к которой относится изобретение
Изобретение относится к гравировальным станкам и устройствам, предназначенным для художественно-декоративной обработки поверхности изделий из различных материалов, металлических, неметаллических и каменных, например, для оформления фасадов зданий и сооружений, памятников, украшения интерьеров, путем точного переноса изображения с копируемого изображения-оригинала на поверхность заготовки.
Уровень техники
Из уровня техники известен способ формирования полутонового изображения в функциональном слое изделия и программно-аппаратный комплекс для его реализации, патент РФ №2355586, согласно которому осуществляется избирательное механическое удаление материала на нормируемую глубину методом динамического микрофрезерования, для чего инструмент совершает вращательное и колебательное движения с помощью специального исполнительного узла, который включает жестко закрепленный на корпусе электромеханический преобразователь, сердечник которого охвачен пружиной, реализующей его возвратно-поступательное действие, и, путем силового воздействия, приводит в движение толкатель, функционально являющийся хвостовиком турбины пневмопривода, через деталь, регулирующую ход сердечника. Турбина связана с инструментом через цанговый зажим. Движение вращения осуществляется путем подачи сжатого воздуха через штуцер пневмопривода. Движение обратного хода инструмента осуществляется двумя возвратными пружинами, соединяющими корпус пневмопривода с направляющей винтами. Возвратно-поступательного движения толкателя обеспечивают шесть шариковых подшипников качения, которые соединены с направляющей тремя прижимами через винты. Направляющая соединена с корпусом переходника резьбовым соединением, который привинчен к корпусу электромеханического преобразователя тремя винтами. Происходит соударение сердечника электромеханического преобразователя со звеном вращения, то есть с хвостовиком ротора, пневмотурбины. При этом около 56% кинетической энергии сердечника электромеханического преобразователя передается звену вращения, часть теряется при ударе, а часть энергии (около 10 %) вследствие волновой деформации меняет знак и содействует отскоку сердечника в обратном направлении. В момент соударения прекращается действие электромагнитной силы.
К основным недостаткам данного известного из уровня техники способа формирования полутонового изображения в функциональном слое можно отнести следующее. Во-первых, периодически повторяющиеся соударения сердечника электромеханического преобразователя со звеном вращения, то есть с хвостовиком ротора пневмотурбины, приводят к быстрому износу и разрушению сердечника электромеханического преобразователя и хвостовика ротора пневмотурбины. Во-вторых, только небольшая часть, около 56 %, полезной ударной энергии сердечника электромеханического преобразователя передается звену вращения, что приводит к нерациональному использованию полезной ударной энергии, уменьшению глубины обработки, а также низкому качеству формируемого в функциональном слое изделия полутонового изображения. В-третьих, программно-аппаратный комплекс, включающий также гравировальный станок, требует для работы воздушный компрессор, как источник энергии для пневмопривода вращения гравировального инструмента, что отрицательно влияет на стабильность его вращения, и, следовательно, ухудшает качество гравировки.
Известно гравировальное устройство для нанесения изображения на твердой поверхности, патент РФ №2350476, включающее первый электродвигатель, на валу которого установлено коромысло, продольная ось которого перпендикулярна оси вращения вала первого электродвигателя, с возможностью углового колебательного движения относительно точки пересечения продольной оси коромысла и оси вращения вала первого электродвигателя, коромысло снабжено рычагами, верхние части рычагов взаимодействуют с пружинами, соединяющие каждую боковую сторону коромысла с поверхностью корпуса, на конце коромысла, противоположно валу первого электродвигателя, установлен второй электродвигатель, причем ось вращения вала второго электродвигателя перпендикулярна продольной оси коромысла и оси вращения вала первого электродвигателя, а конец вала второго электродвигателя соединен с инструментом, выполненным с возможностью вращения вокруг своей оси.
Это известное техническое решение выбрано в качестве прототипа заявленного гравировального устройства. Недостатком этого известного устройства является массивная гравировальная головка, в корпусе которой установлен не только шпиндель с гравировальным инструментом, но и электродвигатель. Массивная гравировальная головка ограничивает частоту нанесения ударов гравировальным инструментом и, следовательно, производительность гравирования.
Раскрытие изобретения
Техническим результатом, достигаемым в заявленном станке и в устройстве гравирования, является повышение качества гравировки путем совмещения ударного воздействия гравировального инструмента с его поворотом вокруг своей оси при взаимодействии с заготовкой, снижение массы элементов гравировального устройства, совершающих колебательные движения.
Указанный технический результат достигается в гравировальном станке, включающем каркас, каретку, связанную с каркасом, с возможностью перемещения над поверхностью заготовки, гравировальное устройство с виброприводом передачи ударных колебаний гравировальному инструменту, установленное на каретке, двигатель передачи вращения гравировальному инструменту, а также механизм вертикального перемещения гравировального устройства, тем, что двигатель передачи вращения гравировальному инструменту установлен неподвижно на каретке, гравировальный инструмент установлен в шпиндель, а шпиндель, в свою очередь, связан с консолью вибропривода с возможностью совершать колебания вместе с ней, и с двигателем передачи вращения гравировальному инструменту, либо через взаимодействующие без механического контакта магнитов, либо посредством гибкого вала.
Станок может включать блок управления и датчик перемещения гравировального инструмента в плоскости его колебаний, соединенный с блоком управления.
Станок может включать датчик поворота или датчик скорости вращения шпинделя с гравировальным инструментом, соединенный с блоком управления.
Станок может быть выполнен с возможностью перемещения гравировального устройства над поверхностью заготовки по трем декартовым координатам.
Механизм вертикального перемещения гравировального устройства относительно поверхности заготовки в процессе гравировки включает датчик перемещения гравировального устройства или измерения расстояния между вершиной наконечника гравировального инструмента в нейтральном его положении и поверхностью заготовки, а также привод вертикальной каретки для регулирования расстояния между основанием гравировального устройства и поверхностью заготовки в процессе гравировки.
Механизм перемещения гравировального устройства может включать, по меньшей мере один, подшипник, выполненный с возможностью непрерывного скольжения или качения по поверхности заготовки с контролем ее профиля и управления перемещением гравировального устройства в вертикальном направлении относительно поверхности в зависимости от ее профиля.
Датчик может быть выполнен с валом, с возможностью его поворота вокруг своей оси, и с установленным на валу щупом, выполненным с возможностью непрерывного скольжения или качения по поверхности изделия и поворота вместе с валом при изменении расстояния между гравировальным устройством и поверхностью заготовки в процессе гравировки.
Указанный технический результат достигается также в гравировальном устройстве, включающем каретку, опорную пластину, установленный на пластине вибропривод передачи ударных колебаний шпинделю, и двигатель передачи вращения шпинделю тем, что шпиндель расположен в гравировальной головке, приводимой в движение виброприводом передачи ударных колебаний гравировальному инструменту, двигатель передачи вращения шпинделю установлен либо на единой опорной пластине вместе с виброприводом передачи ударных колебаний, либо крепится к каретке, минуя опорную пластину, гравировальный инструмент крепится к шпинделю, а передача вращения шпинделю с гравировальным инструментом осуществляется двигателем передачи вращения либо посредством взаимодействующих без механического контакта магнитов, связанных, соответственно, с валом двигателя передачи вращения и шпинделем, либо посредством гибкого вала, связывающий механически вал двигателя со шпинделем.
Предпочтительно в качестве магнитов использовать диаметрально намагниченные постоянные магниты с чередующейся полярностью.
Не исключается применение постоянных магнитов с осевым или радиальным распределением полярностей.
Гравировальное устройство может включать датчик перемещения гравировального инструмента в плоскости его колебаний, который может быть выполнен в виде оптического датчика угла или магнитного датчика Холла, установленного на валу электродвигателя, или датчика изменения ЭДС обмотки статора электродвигателя при повороте его вала.
Гравировальное устройство может содержать датчик перемещения гравировального устройства относительно поверхности изделия в процессе гравировки, включающий датчик угла поворота с установленным на валу щупом, выполненным с возможностью непрерывного скольжения или качения по поверхности изделия и поворота вместе с валом при изменении расстояния между гравировальным устройством и поверхностью заготовки.
Гравировальное устройство может включать датчик поворота или датчик скорости вращения шпинделя с гравировальным инструментом.
Опорная пластина может быть выполнена, с возможностью установки двигателя передачи вращения и вибропривода передачи ударных колебаний гравировальному инструменту, в виде рамы или в едином корпусе вибропривода передачи ударных колебаний гравировальному инструменту, а двигатель передачи вращения может быть установлен на кронштейн.
Двигатель передачи вращения гравировальному инструменту, в случае бесконтактной передачи ему вращательного движения, содержит по меньшей мере один постоянный магнит, связанный с валом двигателя, защитный кожух и элементы крепления двигателя к каретке гравировального станка или к опорной пластине гравировального устройства.
Двигатель передачи вращения гравировальному инструменту, в случае контактной передачи ему вращательного движения, содержит гибкий вал, соединяющий вал двигателя со шпинделем, защитный кожух и элементы крепления двигателя к каретке гравировального стайка или к опорной пластине гравировального устройства.
Оси вращения шпинделя гравировальной головки и вала двигателя передачи вращения гравировальному инструменту могут совпадать.
Вибропривод передачи ударных колебаний гравировальному инструменту может включать двигатель, установленный в корпусе, вал которого снабжен упругой связью, обеспечивающей его колебательное движение, консоли, установленной на валу двигателя, гравировальной головки со шпинделем и с гравировальным инструментом, закрепленной на консоли.
Вибропривод передачи ударных колебаний может включать корпус, электродвигатель, в частности шаговый, и, по меньшей мере одна механическая, в частности цилиндрическая, пружина, связывающая консоль, установленная на валу двигателя, с корпусом или с двигателем, а датчик поворота консоли выполнен, в частности, как оптический датчик или магнитный датчик Холла, установленный на валу двигателя.
Вибропривод передачи ударных колебаний может включать корпус, консоль или рычаг с гравировальным инструментом, электромагнит с сердечником и с якорем, в роли которого может выступать постоянный магнит, установленным на консоли, и упругая связь, удерживающая консоль в нейтральном положении.
Вибропривод передачи ударных колебаний может включать две магнитные пружины, первые постоянные магниты которых установлены на консоли, а их вторые постоянные магниты установлены на корпусе устройства напротив первых и обращены к ним одноименными полюсами.
Упругая связь может быть выполнена, по меньшей мере, как одна механическая пружина, плоская или цилиндрическая, и/или магнитные пружины, удерживающие консоль в нейтральном положении.
Краткое описание чертежей.
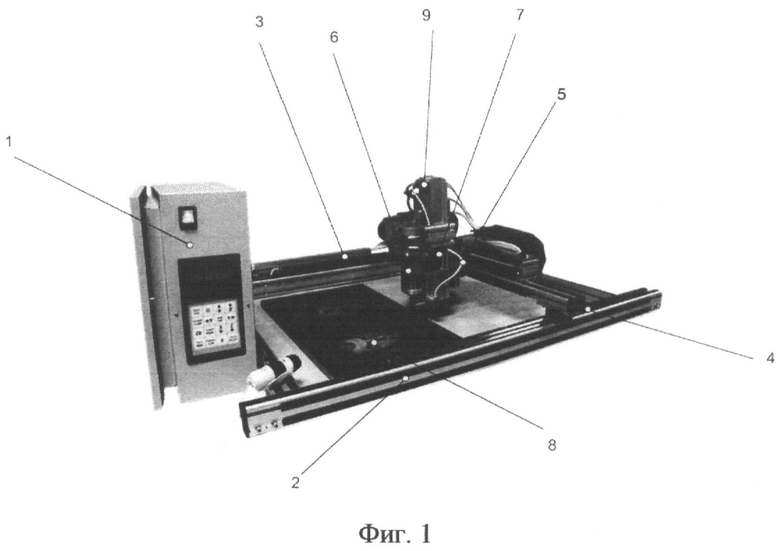
На фиг.1 изображен трехкоординатный гравировальный станок.
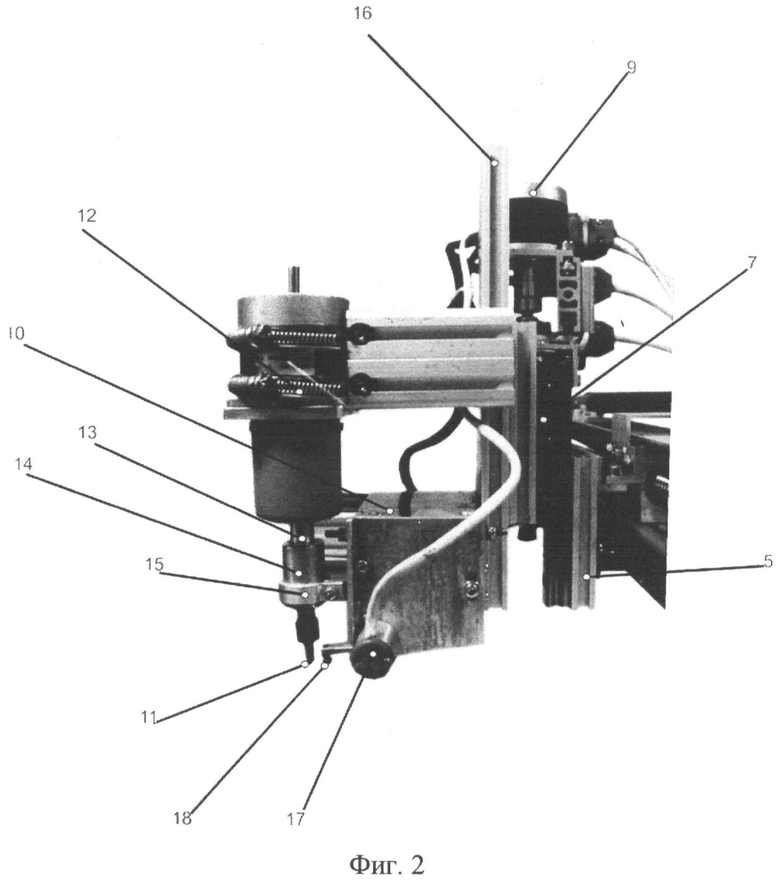
На фиг.2 изображено гравировальное устройство, установленное на каретке трехкоординатного гравировального станка.
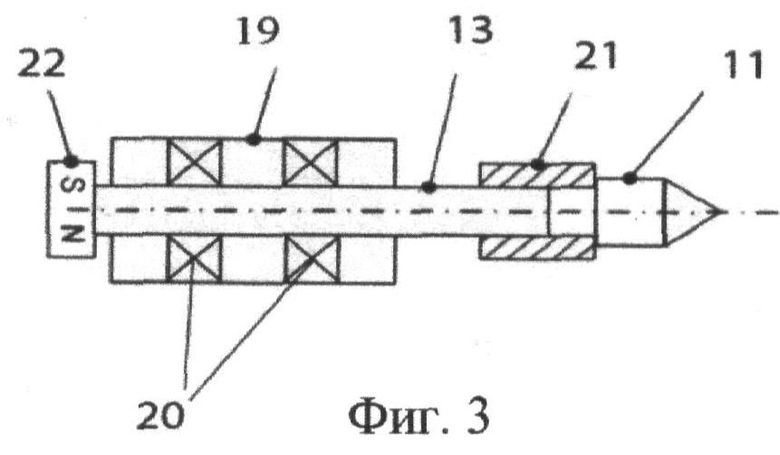
На фиг.3 представлена схема гравировальной головки со шпинделем и с закрепленным на шпинделе гравировальным инструментом.
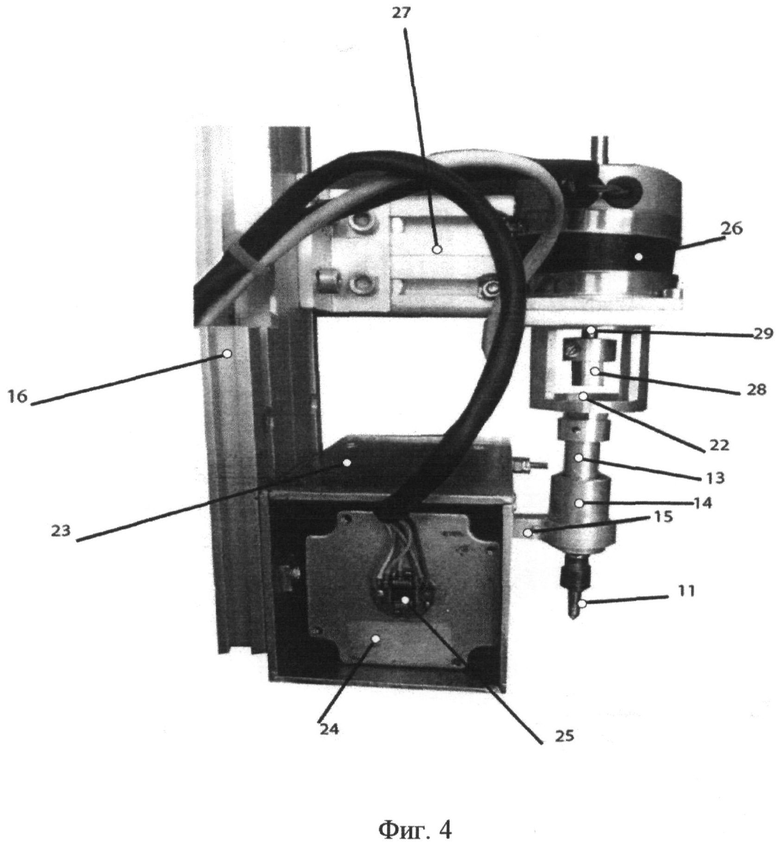
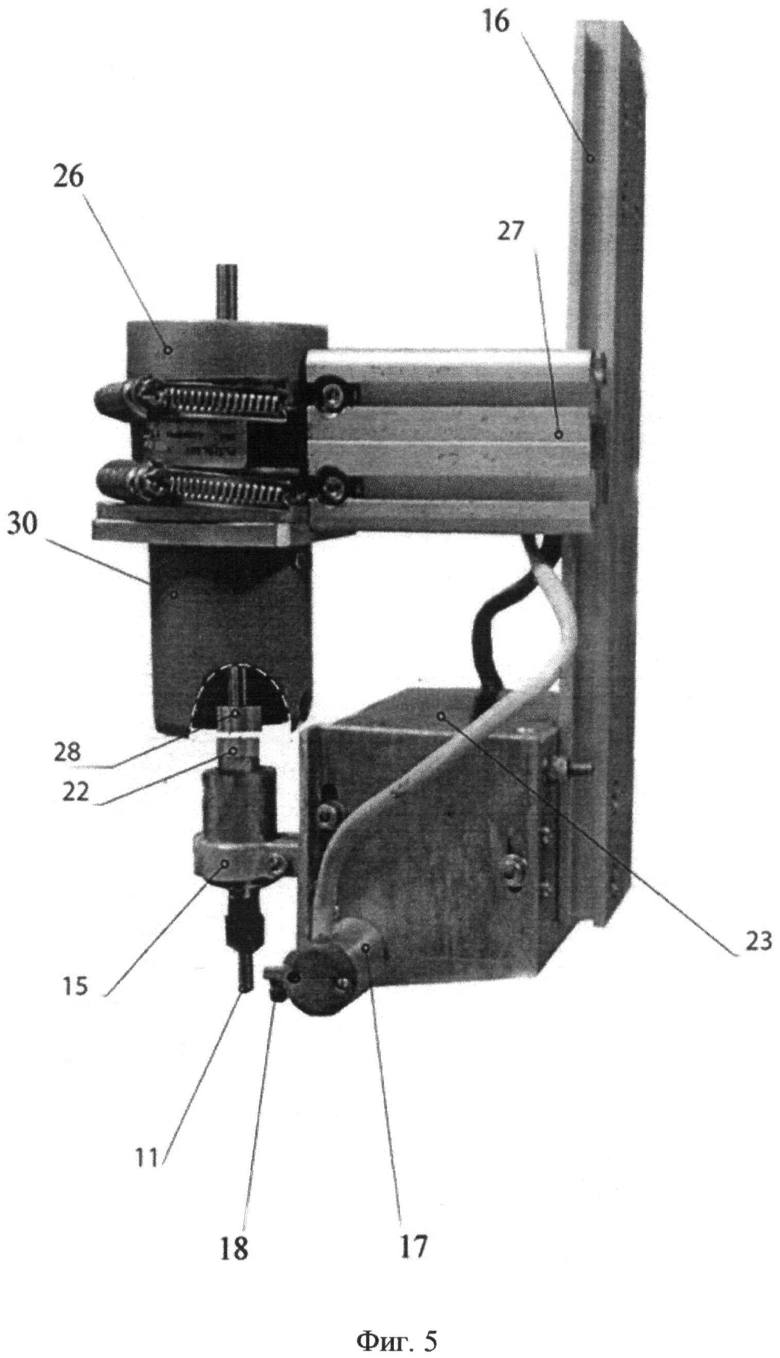
На фиг.4 и 5 изображено гравировальное устройство, в котором двигатель передачи вращения шпинделю с гравировальным инструментом установлен на единой опорной пластине с виброприводом передачи ударных колебаний.
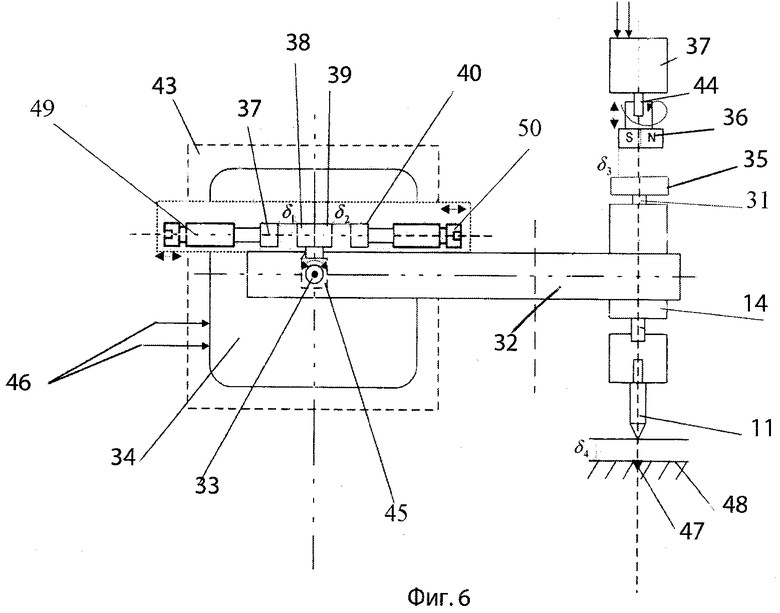
На фиг.6 представлена схема гравировального устройства, в котором предусмотрена передача вращения шпинделю с гравировальным инструментом с использованием постоянных магнитов и передача колебательных движений гравировальному инструменту с использованием магнитных упругих связей.
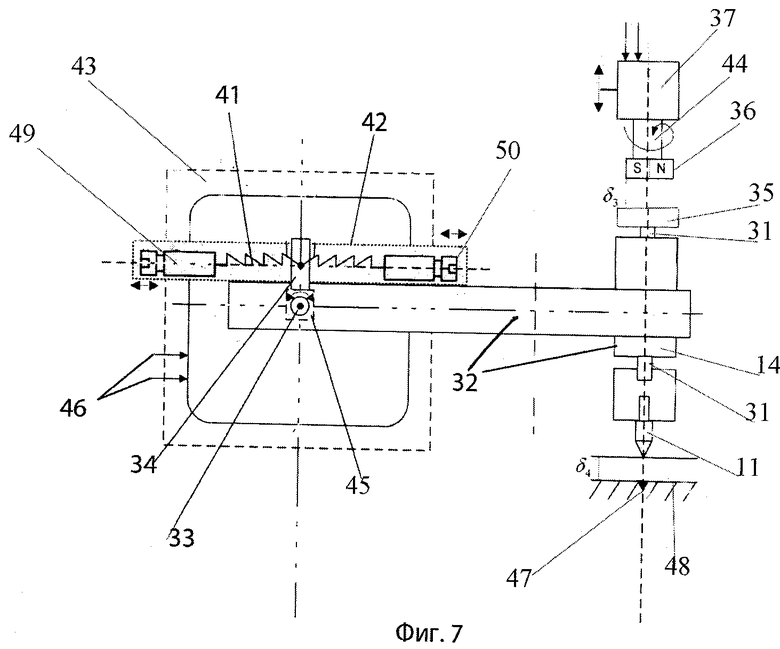
На фиг.7 представлена схема гравировального устройства, в котором предусмотрена передача вращения шпинделю с гравировальным инструментом с использованием вращающего момента магнитного поля постоянных магнитов и передача колебательных движений гравировальному инструменту с использованием упругих связей в виде механических пружин.
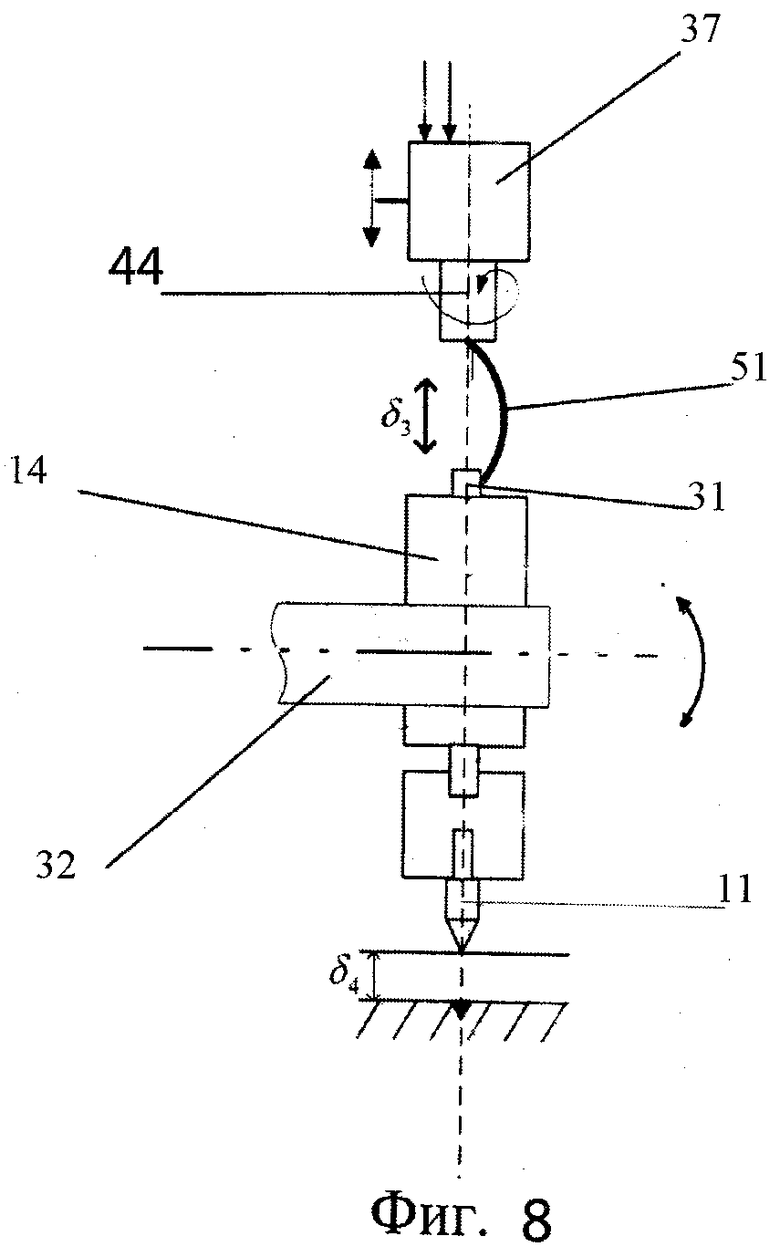
На фиг.8 представлена схема передачи вращения шпинделю с гравировальным инструментом с использованием гибкого вала.
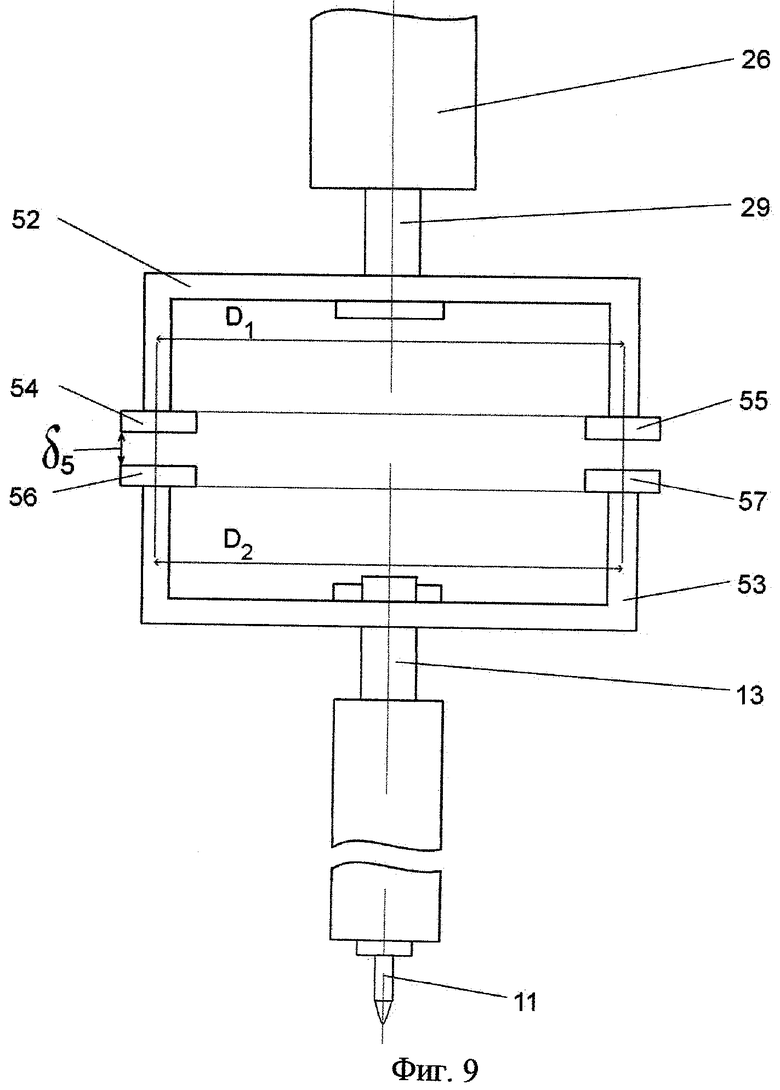
На фиг.9 представлен пример схемы передачи вращения шпинделю с гравировальным инструментом с использованием четырех постоянных магнитов.
Осуществление изобретения.
Изображенный на фиг.1 гравировальный станок включает блок управления 1, каркас 2, закрепленная на каркасе, с возможностью перемещения вдоль одной из его осей, каретку кадровой развертки 3, на которой размещена траверса кадровой развертки с поперечной направляющей 4, несущей каретку 5 строчной развертки.
На несущей каретке 5 установлена каретка 7 вертикального перемещения, на которой закреплено гравировальное устройство 6, установленное с возможностью перемещения над поверхностью заготовки 8 по трем декартовым координатам. Вход привода перемещения каретки 3 кадровой развертки соединен с первым выходом блока управления 1, вход привода перемещения несущей каретки 5 строчной развертки соединен со вторым выходом блока управления 1.
На фиг.2 изображена более детально каретка 7 с двигателем 9 ее перемещения в вертикальном направлении и с установленным на каретке 7 гравировальным устройством, включающим вибропривод 10 передачи колебательных движений гравировальному инструменту 11 и двигатель 12 передачи вращения гравировальному инструменту 11.
Гравировальный инструмент 11 закреплен на шпинделе 13 гравировальной головки 14, установленной на консоли 15. Консоль 15 установлена на валу двигателя вибропривода передачи ударных колебаний.
Управление кареткой 7 вертикального перемещения и гравировальным устройством в процессе гравировки осуществляется механизмом перемещения гравировального устройства относительно поверхности заготовки, который включает датчик 17 измерения расстояния между основанием гравировального устройства и поверхностью заготовки, и двигатель 9, для установки и регулирования заданного расстояния между основанием гравировального устройства и поверхностью заготовки. Механизм перемещения гравировального устройства может включать подшипник, выполненный с возможностью непрерывного скольжения или качения, по поверхности заготовки 8 с контролем ее профиля и управления перемещением гравировального устройства в вертикальном направлении относительно поверхности в зависимости от ее профиля. Гравировальное устройство выполнено с опорной пластиной 16, установленной на каретке 7, с возможностью его перемещения в вертикальном направлении. Двигатель 9 привода перемещения вертикальной каретки 7 с гравировальным устройством, в случае использования электронной следящей системы с датчиком обратной связи, соединен с третьим выходом блока управления и обеспечивает регулировку величины требуемого заданного расстояния, или зазора, между вершиной наконечника гравировального инструмента 11 и поверхностью заготовки (поз.8 на фиг.1) в процессе гравировки. В этом случае вертикальное перемещение гравировального устройства осуществляется с помощью передачи, например, винт-гайка, связанной с кареткой 7, и управляемой двигателем 9 вертикального привода. Датчик перемещения гравировального устройства может быть установлен непосредственно на каретке 7. Вал датчика перемещения оснащен щупом 18, находящимся в постоянном контакте, благодаря упругой магнитной или механической связи, с поверхностью заготовки 8 в процессе перемещения по ней.
На фиг.3 представлен вариант выполнения гравировальной головки (поз. 14 на фиг.2), который включает корпус 19, шпиндель 13, установленный с помощью блока подшипников 20 в корпусе 19, а также элемент крепления 21 гравировального инструмента 11 со шпинделем 13 выполненный, например, в виде цангового зажима. На другом торце шпинделя 13, противоположно элементу крепления 21, закреплен первый постоянный магнит 22, с возможностью вращения вместе со шпинделем 13.
Не исключается вариант, в котором на торце шпинделя 13, противоположно элементу крепления 21 гравировального инструмента, закреплен сердечник из стального или другого магнитного материала, с возможностью вращения вместе со шпинделем 13.
На фиг.4 изображено гравировальное устройство, включающее два привода передачи движений гравировальному инструменту 11: вибропривод 23 передачи ударных колебаний с двигателем 24 и привод передачи вращения с двигателем 26. Вибропривод передачи ударных колебаний и двигатель передачи вращения установлены на единой опорной пластине 16, при этом двигатель передачи вращения может быть закреплен к пластине с помощью, например, кронштейна 27. Двигатель также может быть закреплен к опорной пластине неподвижно.
На валу двигателя 24 вибропривода передачи ударных колебаний установлен датчик 25 перемещения гравировального инструмента 11, который определяет величину поворота вала и, следовательно, консоли 15 с гравировальной головкой 14 с гравировальным инструментом 11, что позволяет однозначно определить перемещение гравировального инструмента в плоскости его колебаний. Для вращения гравировального инструмента 11 вокруг своей оси используется бесконтактная магнитная передача. Первый, ведомый, магнит 22 установлен на торце шпинделя 13, а второй, ведущий, магнит 28 магнитной передачи установлен на валу 29 двигателя 26 привода передачи вращения.
Двигатель 24 вибропривода передачи ударных колебаний соединен с четвертым выходом блока управления и служит для передачи колебательных движений гравировальному инструменту 11. Двигатель 26 привода передачи вращения соединен с пятым выходом блока управления и обеспечивает запуск, торможение, а также управление вращательным движением гравировального инструмента через шпиндель 13 гравировальной головки 14. Не исключается регулирование скорости вращения гравировальным инструментом оператором вручную с помощью регулировочных винтов. Датчик 25 перемещения гравировального инструмента соединен с первым входом блока управления, который определяет величину поворота вала и, следовательно, консоли 15 с гравировальной головкой 14 и с гравировальным инструментом 11.
На фиг.5 также изображено гравировальное устройство, включающее гравировальный инструмент 11 и два его привода: вибропривод 23 передачи ударных колебаний в корпусе и привод передачи вращения с двигателем 26, при этом магнитная передача реализована с применением постоянных магнитов 28 и 22, показанные в вырезе защитного кожуха 30. Гравировальное устройство снабжено датчиком 17 его перемещения по вертикальной плоскости относительно поверхности заготовки в процессе гравировки. Вал датчика 17 оснащен щупом 18, находящимся в постоянном контакте с поверхностью заготовки (поз.8 на фиг.1) в процессе перемещения по этой поверхности во время гравировки. Датчик 17 перемещения гравировального устройства соединен со вторым входом блока управления и обеспечивает измерение величины зазора между гравировальным устройством и поверхностью заготовки в процессе гравировки.
На фиг.6 и на фиг.7 представлены различные схемы исполнения гравировального устройства с магнитной передачей вращательного движения шпинделю 31 с гравировальным инструментом 11, закрепленным в гравировальной головке 14, установленной на консоли 32. Консоль, в свою очередь, закреплена на валу 33 двигателя 34. Постоянные магниты 35 и 36, используемые для передачи вращательных движений от двигателя 37 передачи вращения шпинделю 31 с гравировальным инструментом 11, могут быть обращены друг к другу своими разноименными полюсами. Целесообразно использование постоянных магнитов с диаметральным расположением полюсов. Предусмотрена настройка оптимального зазора δз между магнитами 35 и 36. При этом вал 33 двигателя 34 связан бесконтактной упругой связью, выполненной с использованием магнитов 37, 38, 39, 40, как показано на фиг.6, или пружинами 41 и 42, как показано на фиг.7, с корпусом 43 вибропривода или с корпусом самого двигателя 34. Упругая связь обеспечивает возвратно - поворотное, или колебательное, движение вала 33 двигателя 34 с консолью 32, следовательно, и гравировального инструмента 11, при подаче импульсов управления 46 на обмотки двигателя 34.
Как показано на фиг.6 и на фиг.7, вибропривод передачи ударных колебаний, устанавливаемый на пластине гравировального устройства, содержит корпус 43, внутри которого установлен двигатель 34, например, шаговый электродвигатель, на обмотки управления которого с блока управления (поз.1 на фиг.1) поступают управляющие импульсы (поз.46 на фиг.6 и фиг.7). На валу двигателя жестко установлена консоль (поз. 15 на фиг.5, поз.32 на фиг.6 и на фиг.7). Предпочтителен вариант установки консоли перпендикулярно оси вала двигателя. Консоль (поз. 32 на фиг.6 и на фиг.7), благодаря упругой связи вала 33, совершает угловые колебательные движения относительно оси вращения вала 33 электродвигателя 34. Для определения амплитуды колебаний консоли и, следовательно, гравировального инструмента (поз. 11 на фиг.5 и на фиг.6), используется его датчик перемещения (поз.25 на фиг.4, поз.45 на фиг.6 и на фиг.7), установленный на валу 33 электродвигателя 34. Предусмотрена настройка оптимальной величины амплитуды и частоты колебаний консоли с гравировальным инструментом, с помощью винтов 49 и 50, для регулирования величины зазоров δ1 и δ2 между магнитами 37, 38 и 39, 40 бесконтактных упругих связей (фиг.6) или величин натяжения пружин 41 и 42 контактных упругих связей (фиг.7).
На фиг.8 представлена схема передачи вращательных движений гравировальному инструменту 11 посредством контактной механической связи в виде гибкого вала 51, соединяющего вал 44 двигателя 37 передачи вращения со шпинделем 31 гравировальной головки 14, установленной в консоли 32.
В механических устройствах ударные реакции способствуют износу и могут привести к разрушению опор, например, упорных подшипников, или пружины, в случае жесткого ее крепления одним концом в опоре. Исследования показали что, для уменьшения реакций на опоры от приложенного ударного импульса, предпочтительно выполнение консоли таким образом, чтоб обобщенный центр масс консоли и связанных с ней элементов был расположен не ниже горизонтальной плоскости, проходящей через неподвижную ось вращения консоли, а продольная ось гравировального инструмента проходила перпендикулярно, или почти перпендикулярно, поверхности заготовки на кратчайшем расстоянии Н, равного Н=Jz/M*L, от оси вращения консоли, где:
Jz - момент инерции консоли со всеми подвижными и связанными с нею элементами относительно оси Z, проходящей через ось вращения;
М - масса консоли со всеми подвижными и связанными с нею элементами;
L - кратчайшее расстояние от неподвижной оси вращения консоли до центра масс консоли со всеми подвижными и связанными с нею элементами.
Целесообразно, чтобы, в случае расположения упругих связей параллельно вертикальной оси плоскости колебаний гравировального инструмента, кратчайшее расстояние от неподвижной оси вращения до продольной оси упругой связи было не меньше кратчайшего расстояния до центра масс.
На фиг.9 представлен пример схемы передачи вращения шпинделю 13 с гравировальным инструментом 11 с использованием четырех постоянных магнитов: два ведущих 54 и 55 и два ведомых 56 и 57, работающих попарно. Для этого использованы чашечные (тарельчатые) полумуфты 52 и 53 цилиндрической формы. При этом полумуфта 52 с двумя ведущими магнитами, 54 и 55, установленными на торце, соединена с валом 29 двигателя 26 передачи вращения шпинделю, а полумуфта 53 с двумя ведомыми магнитами, 56 и 57, установленными на торце, соединена со шпинделем 13. Магниты расположены так, что обращены друг к другу разноименными полюсами на расстоянии δ5.
Гравировальный станок работает следующим образом.
Как показано на фиг.1, заготовка 8 устанавливается и закрепляется на рабочем столе гравировального станка. Графический образ изображения-оригинала вводят в память компьютера (на схеме не показан) и через его порт, в виде массива пиксельной последовательности, построчно передается в блок управления 1. Сигналы управления с блока управления 1 гравировальным станком поступают соответственно: с первого выхода - на двигатель привода перемещения траверсы кадровой развертки 3 вдоль направляющих каркаса 2; со второго выхода - на двигатель привода перемещения каретки 5 строчной развертки; с третьего выхода - на двигатель привода 9 каретки 7 вертикального перемещения гравировального устройства 6; с четвертого выхода импульсная последовательность (поз.46 на фиг.6 и фиг.7) поступает на обмотку управления двигателем (поз.24 на фиг.4 и поз.34 на фиг.6) вибропривода передачи ударных колебательных движений гравировальному инструменту 11 с амплитудой, пропорциональной яркости точки изображения-оригинала. По сигналу с блока управления 1 (фиг.1) каретка 7 с гравировальным устройством бис датчиком 17 (фиг.2) перемещения гравировального устройства перемещается с заданной скоростью вертикально вниз. Первым поверхность заготовки достигает щуп 18 (фиг.2) датчика 17 (фиг.2) перемещения гравировального устройства. Момент касания щупа 18 (фиг.2) датчика 17 (фиг.2) фиксируется, а числовое значение, которому он соответствует, передается в блок управления 1 (фиг.1) и хранится в памяти. Далее вертикальное перемещение каретки 7(фиг.1) продолжается до момента касания вершиной наконечника гравировального инструмента 11 поверхности заготовки 8 (фиг.1). Момент касания фиксируется датчиком 25 (фиг.4) перемещения гравировального инструмента 11, числовое значение которого передается в блок управления. В момент касания вершины наконечника гравировального инструмента 11 поверхности заготовки, каретка 7 (фиг.1) останавливается и начинает обратное перемещение на величину требуемого зазора 64 (фиг.6) между вершиной наконечника гравировального инструмента 11 и поверхностью заготовки 48 (фиг.6).
Величина требуемого зазора 84 устанавливается либо с помощью датчика 45 (фиг.6) перемещения гравировального устройства, либо с помощью отсчета числа импульсов, подаваемых на двигатель 37 вертикального привода каретки 7 (фиг.1). Качество гравировки изображения существенно зависит от точности установки требуемого технологического зазора 64 и регулирования этого зазора в процессе гравировки. Установка требуемого технологического зазора может быть осуществлена как вручную оператором, так и автоматически, с помощью датчика (поз.25 на фиг.4 или поз.45 на фиг.6) положения гравировального инструмента 11. Автоматическое выставление зазора технологически гораздо удобнее, быстрее и точнее, чем ручное выставление, например, с помощью щупов, поэтому в заявке используется подход автоматического выставления зазора.
После выставления зазора запускается двигатель 37 (фиг.6) передачи вращательных движений гравировальному инструменту 11, который соединен с пятым выходом блока управления.
Как указано выше, передача вращения гравировальному инструменту может быть достигнута либо с помощью магнитов (поз.35 и поз.36 на фиг.6), взаимодействующих без механического контакта, либо с помощью гибкого вала, (поз.51 на фиг.8).
При использовании магнитов вращательное движение шпинделю (поз. 31 на фиг.6) с гравировальным инструментом 11 передается в результате взаимодействия магнитных полей двух магнитов: первого магнита, механически связанного с валом двигателя передачи вращения шпинделю и называемого ведущим магнитом, (поз.36 на фиг.6), и второго магнита, механически связанного со шпинделем и называемого ведомым магнитом, (поз.35 на фиг.6), расположенные в защитном кожухе (поз.30 на фиг.5).
Передача вращения шпинделю может быть осуществлена и с использованием нескольких постоянных магнитов. На фиг.9 показан пример реализации такого движения с применением четырех магнитов: два ведущих 54 и 55 и два ведомых 56 и 57, работающих в паре. Для этого использованы чашечные (тарельчатые) полумуфты 52 и 53 цилиндрической формы. При этом полумуфта 52 с двумя ведущими магнитами, 54 и 55, установленными на торце, соединена с валом 29 двигателя передачи вращения шпинделю, а полумуфта 53 с двумя ведомыми магнитами, 56 и 57, установленными на торце, соединена со шпинделем 13. Магниты расположены так, что обращены друг к другу разноименными полюсами на расстоянии δ5. При вращении вала двигателя через полумуфту 52 вращательное движение передается полумуфте 53 и, а через нее, благодаря взаимодействию магнитных полей ведущих и ведомых магнитов, непосредственно шпинделю 13 с гравировальным инструментом 11. Величина момента вращения зависит от количества используемых магнитов, величин диаметров D1 и D2 полумуфт и от расстояния 65 между ведущим и ведомым магнитами. Не исключается использование магнитов, расположенных так, что обращены друг к другу одноименными магнитными полюсами. Полумуфты могут быть изготовлены разных геометрических форм (например, конической) и диаметров D1 и D2 и расположены одна внутри другой, а магниты могут быть расположены как на торцах так и на наружной или внутренней стенках полумуфт.
Вращательное движение гравировальному инструменту 11 может быть передано с применением гибкого вала 51 (фиг.8). Этот вариант обладает существенными недостатками и значительно труднее в реализации, чем вариант с применением магнитов.
Далее начинается процесс гравировки изображения, при котором каретка (поз. 7 на) движется над поверхностью заготовки (поз. 8 на фиг.1), а гравировальный инструмент 11 последовательно наносит удары с вращением по поверхности заготовки, разрушая ее. При этом, щуп 18 (фиг.5) датчика 17 (фиг.5), благодаря упругой связи, постоянно находится в контакте с поверхностью заготовки 8 (фиг.1), перемещаясь по ней. Блок управления 1 (фиг.1) периодически считывает информацию с датчика 17(фиг.5) перемещения гравировального устройства и вычисляет текущую ошибку перемещения Δтек. каретки как разность между заданным значением зазора δ4 и его текущим значением δтек:
Δтек=δ4-δтек,
и передает сигналы управления на двигатель 9 (фиг.2) вертикальной каретки 7 (фиг.2) для компенсации этой ошибки перемещения.
Следует также отметить, что сигнал управления для нанесения каждого удара целесообразно подавать на гравировальное устройство в момент времени, когда гравировальный инструмент (поз.11 на фиг.1) начинает движение по направлению к заготовке, в результате воздействия упругих связей, например, (пружин поз.41 и поз. 42 на фиг.7), с валом (поз.33 на фиг.7) двигателя (поз. 34 на фиг.7) вибропривода передачи ударных колебаний. Этот момент времени определяется, контролируя направления вращения вала (поз.33 на фиг.7) двигателя (поз. 34 на фиг.7) вибропривода, с помощью датчика (поз.25 на фиг.4, поз.45 на фиг.7) перемещения гравировального инструмента. Таким образом, гравировальный инструмент 11 одновременно совершает два движения: колебательное, относительно оси вращения вала (поз.33 на фиг.7) двигателя, и вращательное, вместе со шпинделем (поз.31 на фиг.7), вокруг своей оси вращения. В результате совмещения указанных движений в момент удара гравировальный инструмент оставляет лунки, (поз.47 на фиг.7), разрушая поверхностную пленку заготовки (поз.48 на фиг.7) и проникая вглубь материала. Следует также отметить, что в заявляемом в изобретении гравировальном устройстве отсутствуют дополнительные преобразовательные устройства типа кулачковых механизмов, эксцентриков и тому подобным, что повышает надежность конструкции в целом при обеспечении простоты регулировки настроечных параметров гравировального станка.
Гравировальное устройство работает следующим образом.
Описание работы устройства приводится на примере фиг.7. На обмотки управления вибропривода передачи колебаний гравировальному инструменту, например, шагового двигателя 34, поступает последовательность импульсов управления 46 модулированных либо по ширине, либо по частоте, либо по амплитуде, либо их комбинации. Каждый импульс имеет свою ширину и период следования, соответствующие яркости точки гравируемого изображения и параметрам лунок 47 на поверхности 48 заготовки. Во время действия импульса управления вал 33 поворачивается вокруг своей оси и приводит в движение консоль 32 и связанные с ней, непосредственно, либо через рычаги элементы упругих связей, например, механические пружины, которые оказывают упругое сопротивление перемещению консоли 32, ограничивая ее движение. Консоль 32 перемещает гравировальный инструмент 11 в направлении поверхности 48 заготовки. Одновременно вал двигателя 37 передачи вращения крутится с заданной скоростью. Вращательное движение и, следовательно, крутящий момент передаются шпинделю 31 и гравировальному инструменту 11 за счет взаимодействия магнитных полей ведущего 36 и ведомого 35 постоянных магнитов.
Не исключаются возвратно-поворотные колебательные движения вала двигателя 37 передачи вращения вокруг своей оси вращения с заданной частотой, задавая гравировальному инструменту возвратно-колебательные движения вокруг своей оси, если это требует алгоритм управления.
Гравировальная головка может дополнительно включает датчик поворота или датчик скорости вращения шпинделя с гравировальным инструментом для контроля его вращения.
Таким образом, гравировальный инструмент 11 одновременно совершает два движения: колебательное, в плоскости удара, относительно оси вращения вала 33 двигателя 34, и вращательное, вместе со шпинделем 31, вокруг своей оси вращения.
Группа изобретений относится к гравировальным станкам и устройствам, предназначенным для художественно-декоративной обработки поверхности изделий из различных материалов путем точного переноса изображения с копируемого изображения-оригинала на поверхность заготовки. Гравировальный станок включает каркас, связанную с ним, с возможностью перемещения над поверхностью заготовки, каретку, на которую установлено гравировальное устройство с виброприводом передачи ударных колебаний гравировальному инструменту, двигатель передачи вращения гравировальному инструменту, а также механизм вертикального перемещения гравировального устройства, при этом двигатель передачи вращения гравировальному инструменту установлен неподвижно на каретке, гравировальный инструмент установлен в шпиндель, шпиндель связан с консолью вибропривода с возможностью совершать колебания вместе с ней, а передача вращения шпинделю осуществляется двигателем либо посредством взаимодействующих без механического контакта магнитов, либо посредством гибкого вала. Техническими результатами группы изобретений являются повышение качества гравировки путем совмещения ударного воздействия гравировального инструмента с его поворотом вокруг своей оси при взаимодействии с заготовкой и снижение массы элементов гравировального устройства, совершающих колебательные движения. 2 н. и 23 з.п. ф-лы, 9 ил.
1. Гравировальный станок, включающий каркас, связанную с ним, с возможностью перемещения над поверхностью заготовки, каретку, на которую установлено гравировальное устройство с виброприводом передачи ударных колебаний гравировальному инструменту, двигатель передачи вращения гравировальному инструменту, а также механизм вертикального перемещения гравировального устройства, отличающийся тем, что двигатель передачи вращения гравировальному инструменту установлен неподвижно на каретке, гравировальный инструмент установлен в шпиндель, шпиндель связан с консолью вибропривода с возможностью совершать колебания вместе с ней, а передача вращения шпинделю осуществляется двигателем либо посредством взаимодействующих без механического контакта магнитов, либо посредством гибкого вала.
2. Гравировальный станок по п.1, отличающийся тем, что дополнительно включает блок управления и датчик перемещения гравировального инструмента в плоскости его колебаний, соединенный с блоком управления.
3. Гравировальный станок по п.2, отличающийся тем, что датчик перемещения гравировального инструмента выполнен либо как оптический датчик поворота вала электродвигателя, либо как магнитный датчик Холла, либо как датчик изменения ЭДС обмотки статора электродвигателя при повороте его вала.
4. Гравировальный станок по п.1, отличающийся тем, что механизм вертикального перемещения гравировального устройства включает датчик измерения расстояния между основанием гравировального устройства и поверхностью заготовки, а также двигатель вертикального перемещения каретки, с возможностью установки и регулирования требуемого расстояния между основанием гравировального устройства и поверхностью заготовки.
5. Гравировальный станок по п.1, отличающийся тем, что механизм вертикального перемещения гравировального устройства включает, по меньшей мере, один подшипник, выполненный с возможностью непрерывного скольжения или качения по поверхности заготовки с контролем ее профиля и управления перемещением гравировального устройства в вертикальном направлении относительно поверхности в зависимости от ее профиля.
6. Гравировальный станок по п.4, отличающийся тем, что датчик для измерения расстояния между основанием гравировального устройства и поверхностью заготовки включает щуп, выполненный с возможностью непрерывного скольжения или качения по поверхности заготовки.
7. Гравировальный станок по п.1, отличающийся тем, что вибропривод ударного действия включает электродвигатель с валом, снабженным упругой связью, обеспечивающей возвратно-поворотное движение вала, при этом гравировальная головка со шпинделем и гравировальным инструментом закреплена на консоли, установленной на валу электродвигателя.
8. Гравировальный станок по п.1, отличающийся тем, что дополнительно включает датчик поворота или датчик скорости вращения шпинделя, соединенный с блоком управления.
9. Гравировальный станок по п.1, отличающийся тем, что гравировальное устройство выполнено с возможностью перемещения над поверхностью заготовки по трем декартовым координатам.
10. Гравировальное устройство, включающее опорную пластину, установленный на ней вибропривод передачи ударных колебаний гравировальному инструменту и шпиндель передачи вращения гравировальному инструменту, отличающееся тем, что шпиндель установлен на консоли с возможностью совершать колебательные движения вместе с ней, передача вращения шпинделю с гравировальным инструментом выполнена двигателем либо посредством взаимодействующих без механического контакт, по меньшей мере, одного магнита, связанного с валом двигателя, и, по меньшей мере, одного магнита, связанного с шпинделем, либо посредством гибкого вала, механически связывающего вал двигателя со шпинделем, а двигатель закреплен к опорной пластине неподвижно.
11. Гравировальное устройство по п.10, отличающееся тем, что консоль выполнена так, что обобщенный центр масс консоли и связанных с ней элементов, расположен не ниже горизонтальной плоскости, проходящей через продольную ось консоли, а продольная ось гравировального инструмента проходит перпендикулярно поверхности заготовки на кратчайшем расстоянии от оси вращения консоли.
12. Гравировальное устройство по п.10, отличающееся тем, что опорная пластина, на которой установлены двигатель передачи вращения и вибропривод передачи ударных колебаний, выполнена в виде рамы или корпуса вибропривода, а двигатель привода передачи вращения установлен на кронштейне.
13. Гравировальное устройство по п.10, отличающееся тем, что оси вращения шпинделя и вала двигателя передачи вращения совпадают.
14. Гравировальное устройство по п.10, отличающееся тем, что вибропривод передачи ударных колебаний включает двигатель с валом, снабженным упругой связью, обеспечивающей возвратно-поворотное движение вала, при этом гравировальная головка со шпинделем закреплена на консоли, установленной на валу двигателя.
15. Гравировальное устройство по п.11, отличающееся тем, что кратчайшее расстояние от неподвижной оси вращения консоли до продольной оси упругой связи не меньше кратчайшего расстояния до центра масс.
16. Гравировальное устройство по п.10, отличающееся тем, что вибропривод передачи ударных колебаний дополнительно включает датчик перемещения гравировального инструмента в плоскости колебаний.
17. Гравировальное устройство по п.16, отличающееся тем, что датчик перемещения гравировального инструмента выполнен в виде оптического датчика, или магнитного датчика Холла, связанного с валом двигателя, или в виде датчика изменения ЭДС обмотки статора двигателя при повороте его вала.
18. Гравировальное устройство по п.10, отличающееся тем, что дополнительно включает датчик перемещения гравировального устройства относительно поверхности изделия в процессе гравировки.
19. Гравировальное устройство по п.18, отличающееся тем, что датчик перемещения гравировального устройства выполнен как механический в виде, по меньшей мере, одного подшипника, выполненного с возможностью непрерывного скольжения или качения по поверхности заготовки, вызывая вертикальное перемещение гравировального устройства при изменении профиля поверхности заготовки.
20. Гравировальное устройство по п.10, отличающееся тем, что дополнительно включает датчик поворота или датчик скорости вращения шпинделя с гравировальным инструментом.
21. Гравировальное устройство по п.10, отличающееся тем, что взаимодействующие без механического контакта магниты обращены друг к другу разноименными полюсами.
22. Гравировальное устройство по п.10, отличающееся тем, что взаимодействующие без механического контакта магниты выполнены с диаметральным расположением полюсов.
23. Гравировальное устройство по п.10, отличающееся тем, что вибропривод передачи ударных колебаний может включать корпус, консоль с гравировальным инструментом, электромагнит с сердечником и с якорем, установленным на консоли, и, по меньшей мере, одна механическая пружина и/или магнитные пружины, удерживающие консоль в нейтральном положении.
24. Гравировальное устройство по п.10, отличающееся тем, что шпиндель выполнен с возможностью установки на консоли вибропривода передачи ударных колебаний гравировальному инструменту посредством гравировальной головки.
25. Гравировальное устройство по п.24, отличающееся тем, что гравировальная головка включает корпус, шпиндель, расположенный в корпусе в подшипниках, постоянный магнит, установленный на торце шпинделя, а также элемент крепления гравировального инструмента к шпинделю.
| US 5126605 A, 30.06.1992 | |||
| Способ регенерации катализаторов | 1945 |
|
SU67926A1 |
| УСТРОЙСТВО ДЛЯ НАНЕСЕНИЯ ПОЛУТОНОВОГО ИЗОБРАЖЕНИЯ НА ПЛОСКУЮ ПОВЕРХНОСТЬ ПОЛИРОВАННОГО ИЗДЕЛИЯ | 1997 |
|
RU2121444C1 |
| УСТРОЙСТВО ДЛЯ НАНЕСЕНИЯ ИЗОБРАЖЕНИЯ НА ТВЕРДОЙ ПОВЕРХНОСТИ | 2007 |
|
RU2350476C2 |
| ГРАВИРОВАЛЬНОЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2010 |
|
RU2429139C1 |

