Изобретение относится к радиотехнике и может быть использовано в системах контроля воздушного пространства с использованием прямых и рассеянных от воздушных объектов сигналов, излучаемых множеством неконтролируемых и контролируемых передатчиков радиоэлектронных систем различного назначения.
Достижение высокой эффективности обнаружения, локализации и идентификации воздушных объектов ограничивается существенной априорной неопределенностью размеров, ориентации в пространстве, отражающих свойств и параметров движения объектов, а также несовершенством известных способов обнаружения и слежения за воздушными объектами.
Технология пассивного обнаружения и слежения за воздушными объектами, использующая естественный подсвет воздушных целей, создаваемый на множестве частот радиоизлучениями передатчиков различного назначения в диапазонах коротких, метровых, дециметровых и сантиметровых волн: широковещательные (коммерческое FM-радиовещание, телевидение высокой четкости), информационные (связь) и измерительные (управление, навигация), пока еще не получила достаточного распространения, несмотря на то, что может существенно повысить скрытность и эффективность обнаружения, пространственной локализации и идентификации широкого класса подвижных объектов.
Известен способ обнаружения и пеленгования воздушных объектов [1], заключающийся в том, что
принимают решеткой антенн многочастотные радиосигналы в полосе приема, во много раз превышающей ширину спектра одиночного радиосигнала передатчика,
формируют комплексные временные спектры радиосигналов каждой антенны и спектр мощности радиосигнала опорной антенны,
по спектру мощности радиосигнала опорной антенны обнаруживают сигналы передатчиков,
по комплексным временным спектрам формируют двумерные комплексные угловые спектры обнаруженных передатчиков,
по угловым спектрам определяют азимутальные и угломестные пеленги передатчиков,
а после сравнения угломестных пеленгов β с порогом разделяют передатчики на наземные и воздушные и определяют наклонную дальность R до передатчиков воздушных целей по формуле R=H/sinβ, где Н - известная высота полета цели.
Данный способ обеспечивает эффективное обнаружение воздушных объектов, оснащенных передатчиками радиосигналов. Однако в условиях радиомолчания данный способ теряет свою эффективность.
Более эффективным является способ обнаружения и пеленгования воздушных объектов [2], свободный от этого недостатка и выбранный в качестве прототипа. Согласно этому способу:
выбирают передатчик, излучающий непрерывный монохроматический или амплитудно-модулированный радиосигнал,
синхронно принимают решеткой из N антенн многолучевой радиосигнал, включающий прямой радиосигнал передатчика и рассеянные объектами радиосигналы этого передатчика,
синхронно преобразуют ансамбль принятых антеннами радиосигналов в цифровые сигналы,
из цифровых сигналов формируют прямой и сжатые рассеянные сигналы,
сравнивают прямой и рассеянные сигналы и определяют доплеровские сдвиги и направления прихода рассеянных сигналов,
по доплеровским сдвигам и направлениям прихода выполняют обнаружение воздушных объектов.
Способ-прототип не требует наличия на борту обнаруживаемого воздушного объекта передатчика, излучающего радиосигналы, так как обеспечивает обнаружение и пеленгование воздушных объектов, используя естественный подсвет воздушных объектов, создаваемый на множестве частот непрерывными монохроматическими или амплитудно-модулированными радиосигналами передатчиков различного назначения.
Недостатком данного способа является низкая помехоустойчивость, и, как следствие, низкая чувствительность обнаружения и недостаточная точность пеленгования воздушных объектов.
Техническим результатом изобретения является повышение чувствительности обнаружения и точности пеленгования воздушных объектов.
Повышение чувствительности обнаружения и точности пеленгования воздушных объектов достигается за счет применения операций радиоэлектронной компенсации многолучевой когерентной помехи от мощного прямого радиосигнала передатчика подсвета, маскирующего слабые рассеянные сигналы.
Технический результат достигается тем, что в способе обнаружения и пеленгования воздушных объектов, заключающемся в том, что выбирают передатчик, излучающий непрерывный монохроматический или амплитудно-модулированный радиосигнал, когерентно принимают решеткой из N антенн многолучевой радиосигнал, включающий прямой радиосигнал передатчика и рассеянные объектами радиосигналы этого передатчика, синхронно преобразуют ансамбль принятых антеннами радиосигналов в цифровые сигналы  , согласно изобретению, запоминают цифровые сигналы , формируют и запоминают временной спектр
, согласно изобретению, запоминают цифровые сигналы , формируют и запоминают временной спектр  каждого цифрового сигнала , определяют значения максимумов модуля
каждого цифрового сигнала , определяют значения максимумов модуля  каждого временного спектра
каждого временного спектра  и сравнивают их с порогом, при превышении порога фиксируют номер m превысившего порог максимума, идентифицируют соответствующую превысившему порог максимуму составляющую временного спектра
и сравнивают их с порогом, при превышении порога фиксируют номер m превысившего порог максимума, идентифицируют соответствующую превысившему порог максимуму составляющую временного спектра  как сигнал когерентной помехи, находят и фиксируют значение амплитуды, частоты и фазы идентифицированного сигнала когерентной помехи, генерируют гармонические сигналы
как сигнал когерентной помехи, находят и фиксируют значение амплитуды, частоты и фазы идентифицированного сигнала когерентной помехи, генерируют гармонические сигналы  с соответствующими найденным значениями амплитуды, частоты и фазы, вычисляют разностный цифровой сигнал каждой антенны
с соответствующими найденным значениями амплитуды, частоты и фазы, вычисляют разностный цифровой сигнал каждой антенны  где M - число идентифицированных сигналов когерентной помехи, формируют и запоминают временной спектр
где M - число идентифицированных сигналов когерентной помехи, формируют и запоминают временной спектр  каждого разностного цифрового сигнала
каждого разностного цифрового сигнала  усредняют по антеннам модули
усредняют по антеннам модули  комплексных временных спектров , определяют по максимумам усредненного модуля
комплексных временных спектров , определяют по максимумам усредненного модуля  число рассеянных сигналов в принятом многолучевом радиосигнале и фиксируют значения абсолютного доплеровского сдвига частоты ωp каждого p-го рассеянного сигнала, идентифицируют соответствующие отдельному максимуму усредненного модуля составляющие комплексного временного спектра как рассеянный сигнал, принятый отдельной антенной
число рассеянных сигналов в принятом многолучевом радиосигнале и фиксируют значения абсолютного доплеровского сдвига частоты ωp каждого p-го рассеянного сигнала, идентифицируют соответствующие отдельному максимуму усредненного модуля составляющие комплексного временного спектра как рассеянный сигнал, принятый отдельной антенной  по идентифицированным рассеянным сигналам определяют азимутально-угломестные направления прихода каждого рассеянного сигнала, выполняют обнаружение и находят оценку радиальной скорости воздушных объектов по значениям абсолютного доплеровского сдвига ωp и азимутально-угломестного направления приема рассеянных сигналов.
по идентифицированным рассеянным сигналам определяют азимутально-угломестные направления прихода каждого рассеянного сигнала, выполняют обнаружение и находят оценку радиальной скорости воздушных объектов по значениям абсолютного доплеровского сдвига ωp и азимутально-угломестного направления приема рассеянных сигналов.
Операции способа поясняются чертежами:
Фиг.1. Структурная схема устройства, реализующего предложенный способ обнаружения и пеленгования воздушных объектов;
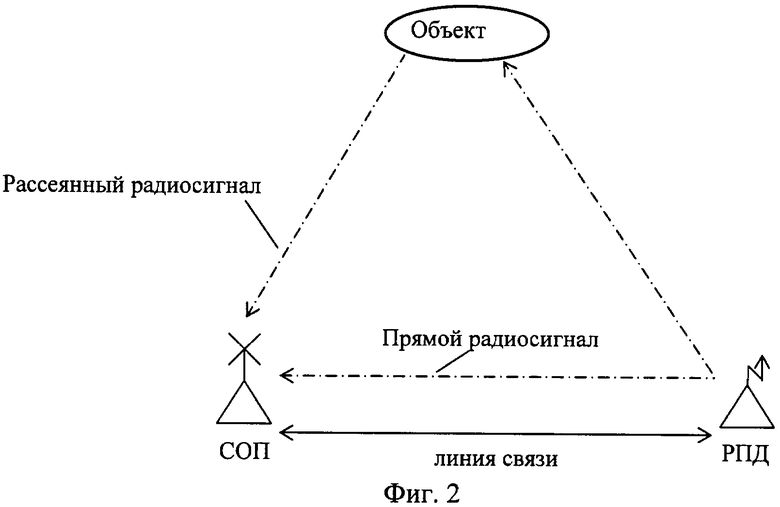
Фиг.2. Схема функционирования устройства, реализующего предложенный способ обнаружения и пеленгования воздушных объектов.
Устройство, в котором реализуется предложенный способ, включает последовательно соединенные антенную систему 1, N-канальный преобразователь частоты (ПРЧ) 2, N-канальное устройство квадратурной дискретизации 3, вычислитель 4 и устройство отображения 5.
В свою очередь, вычислитель 4 включает устройство компенсации когерентных помех 4-1, устройство обнаружения и пеленгования 4-2.
Устройство компенсации когерентных помех 4-1 и устройство обнаружения и пеленгования 4-4 могут быть выполнены в одноканальном или многоканальном вариантах. Рассмотрим многоканальный вариант, обеспечивающий максимально возможное быстродействие обнаружения и пеленгования воздушных объектов.
Антенная система 1 содержит N антенн с номерами n=1…N, объединенных в решетку. Антенная решетка может быть произвольной пространственной конфигурации: плоской прямоугольной, плоской кольцевой или объемной, в частности конформной.
Полоса пропускания каждого канала многоканального ПРЧ 2 обеспечивает одновременный прием радиосигнала передатчика. Кроме того, ПРЧ 2 и устройство 3 выполнены с общим гетеродином, который обеспечивает когерентный прием радиосигналов. Для периодической калибровки каналов по внешнему источнику сигнала с целью устранения их амплитудно-фазовой неидентичности ПРЧ 2 обеспечивает подключение одной из антенн, вместо всех антенн решетки. Возможна калибровка по внутреннему источнику сигнала. При этом может быть использован генератор шума, выход которого также может подключаться вместо всех антенн для периодической калибровки каналов. Если разрядность и быстродействие АЦП, входящих в состав устройства 3, достаточны для непосредственного аналого-цифрового преобразования входных сигналов, как, например, при построении изображения в KB диапазоне, то вместо ПРЧ 2 могут использоваться частотно избирательный полосовой фильтр и усилитель. Другими словами, аналоговая часть устройства, реализующего предлагаемый способ, может быть построена по принципу прямого усиления.
Устройство, реализующее предложенный способ, работает следующим образом.
Многолучевой радиосигнал, включающий прямой радиосигнал выбранного передатчика, излучающего непрерывный монохроматический или амплитудно-модулированный радиосигнал, и рассеянные объектами радиосигналы этого передатчика, когерентно принимаются решеткой 1, включающей N антенн. Принятый каждой антенной решетки 1 зависящий от времени t суммарный радиосигнал xn(t) в ПРЧ 2 когерентно переносится на более низкую частоту.
Сформированный в ПРЧ 2 ансамбль принятых радиосигналов xn(t) синхронно преобразуется в устройстве 3 в ансамбль комплексных цифровых сигналов  .
.
Комплексные цифровые сигналы  синхронно регистрируются на заданном временном интервале в устройстве компенсации когерентных помех 4-1.
синхронно регистрируются на заданном временном интервале в устройстве компенсации когерентных помех 4-1.
Кроме того, в устройстве 4-1 выполняются следующие действия:
- формируется и запоминается временной спектр  каждого цифрового сигнала ;
каждого цифрового сигнала ;
- определяются значения максимумов модуля  каждого временного спектра ;
каждого временного спектра ;
- сравниваются значения максимумов модуля каждого временного спектра с порогом, при превышении порога фиксируется номер m превысившего порог максимума;
- идентифицируется соответствующая превысившему порог максимуму составляющая временного спектра как сигнал когерентной помехи;
- находится и фиксируется значение амплитуды, частоты и фазы идентифицированного сигнала когерентной помехи;
- генерируются гармонические сигналы  с соответствующими найденными значениями амплитуды, частоты и фазы;
с соответствующими найденными значениями амплитуды, частоты и фазы;
- вычисляется разностный цифровой сигнал каждой антенны  , где М - число идентифицированных сигналов когерентной помехи.
, где М - число идентифицированных сигналов когерентной помехи.
Одновременно полученные N разностных цифровых сигналов  поступают в устройство обнаружения и пеленгования 4-2.
поступают в устройство обнаружения и пеленгования 4-2.
В устройстве 4-2 выполняются следующие действия:
- формируется и запоминается временной спектр  каждого
каждого
разностного цифрового сигнала  ;
;
- усредняются по антеннам модули комплексных временных спектров  ;
;
- определяется по максимумам усредненного модуля  число рассеянных сигналов в принятом многолучевом радиосигнале и фиксируется значение абсолютного доплеровского сдвига частоты ωp каждого р-го рассеянного сигнала;
число рассеянных сигналов в принятом многолучевом радиосигнале и фиксируется значение абсолютного доплеровского сдвига частоты ωp каждого р-го рассеянного сигнала;
- идентифицируются соответствующие отдельному максимуму усредненного модуля  составляющие комплексного временного cпектра как рассеянный сигнал, принятый отдельной антенной
составляющие комплексного временного cпектра как рассеянный сигнал, принятый отдельной антенной  ;
;
- по идентифицированным рассеянным сигналам  определяются азимутально-угломестные направления прихода каждого рассеянного сигнала.
определяются азимутально-угломестные направления прихода каждого рассеянного сигнала.
При определении азимутально-угломестных направлений прихода сжатых сигналов, например, с использованием способа [3], по идентифицированным рассеянным сигналам  синтезируется комплексный двумерный угловой спектр, по максимумам модуля которого определяется азимутально-угломестное направление прихода (αp, βp) р-го сжатого сигнала;
синтезируется комплексный двумерный угловой спектр, по максимумам модуля которого определяется азимутально-угломестное направление прихода (αp, βp) р-го сжатого сигнала;
- выполняется обнаружение и находится оценка радиальной скорости воздушных объектов по значениям абсолютного доплеровского сдвига ωp и азимутально-угломестного направления приема рассеянных сигналов.
При этом сравниваются с порогом значения абсолютного доплеровского сдвига со и угломестного направления прихода (βp) р-го сжатого рассеянного сигнала и при превышении порога принимается решение об обнаружении подвижного объекта.
Порог выбирается исходя из минимизации вероятности пропуска объекта.
Кроме того, по доплеровскому сдвигу частоты рассеянного радиосигнала вычисляется радиальная скорость цели  где λ - длина волны радиосигнала подсвета, θ - величина бистатического угла, то есть угла между направлением «передатчик - объект» и направлением «объект - устройство обнаружения и пеленгования».
где λ - длина волны радиосигнала подсвета, θ - величина бистатического угла, то есть угла между направлением «передатчик - объект» и направлением «объект - устройство обнаружения и пеленгования».
В устройстве 9 отображаются результаты поиска.
Таким образом, за счет применения операций радиоэлектронной компенсации многолучевой когерентной помехи от мощного прямого радиосигнала передатчика подсвета, маскирующего слабые рассеянные сигналы, удается решить поставленную задачу с достижением технического результата.
Источники информации
1. RU, патент, 2158002, кл. G01S 13/14, 2000 г.
2. US, патент, 7012552 В2, кл. G08В 21/00, 2006 г.
3. RU, патент, 2190236, кл. G01S 5/04, 2002 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАДИОКОНТРОЛЯ РАДИОМОЛЧАЩИХ ОБЪЕКТОВ | 2014 |
|
RU2572584C1 |
| СПОСОБ ПАССИВНОГО РАДИОМОНИТОРИНГА ВОЗДУШНЫХ ОБЪЕКТОВ | 2010 |
|
RU2440588C1 |
| СПОСОБ РАДИОКОНТРОЛЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2010 |
|
RU2444753C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПЕЛЕНГОВАНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2010 |
|
RU2431864C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ЛОКАЛИЗАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2010 |
|
RU2444756C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПРОСТРАНСТВЕННОЙ ЛОКАЛИЗАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2010 |
|
RU2444754C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПРОСТРАНСТВЕННОЙ ЛОКАЛИЗАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2010 |
|
RU2444755C1 |
| СПОСОБ ПАССИВНОГО ОБНАРУЖЕНИЯ И ПРОСТРАНСТВЕННОЙ ЛОКАЛИЗАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2011 |
|
RU2471200C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МАЛОЗАМЕТНЫХ ПОДВИЖНЫХ ОБЪЕКТОВ | 2013 |
|
RU2534222C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ РАДИОМОЛЧАЩИХ ОБЪЕКТОВ | 2018 |
|
RU2716006C2 |
Изобретение относится к радиотехнике и может быть использовано в системах контроля воздушного пространства с использованием прямых и рассеянных от воздушных объектов сигналов, излучаемых передатчиками радиоэлектронных систем различного назначения. Достигаемым техническим результатом изобретения является повышение чувствительности обнаружения и точности пеленгования воздушных объектов. Повышение чувствительности обнаружения и точности пеленгования воздушных объектов достигается за счет применения операций радиоэлектронной компенсации многолучевой когерентной помехи от мощного прямого радиосигнала передатчика подсвета, маскирующего слабые рассеянные сигналы. 2 ил.
Способ обнаружения и пеленгования воздушных объектов, заключающийся в том, что выбирают передатчик, излучающий непрерывный монохроматический или амплитудно-модулированный радиосигнал, когерентно принимают решеткой из N антенн многолучевой радиосигнал, включающий прямой радиосигнал передатчика и рассеянные объектами радиосигналы этого передатчика, синхронно преобразуют ансамбль принятых антеннами радиосигналов в цифровые сигналы , отличающийся тем, что запоминают цифровые сигналы , формируют и запоминают временной спектр  каждого цифрового сигнала , определяют значения максимумов модуля каждого временного спектра
каждого цифрового сигнала , определяют значения максимумов модуля каждого временного спектра  и сравнивают их с порогом, при превышении порога фиксируют номер m превысившего порог максимума, идентифицируют соответствующую превысившему порог максимуму составляющую временного спектра
и сравнивают их с порогом, при превышении порога фиксируют номер m превысившего порог максимума, идентифицируют соответствующую превысившему порог максимуму составляющую временного спектра  как сигнал когерентной помехи, находят и фиксируют значение амплитуды, частоты и фазы идентифицированного сигнала когерентной помехи, генерируют гармонические сигналы с соответствующими найденным значениями амплитуды, частоты и фазы, вычисляют разностный цифровой сигнал каждой антенны , где М - число идентифицированных сигналов когерентной помехи, формируют и запоминают временной спектр каждого разностного цифрового сигнала
как сигнал когерентной помехи, находят и фиксируют значение амплитуды, частоты и фазы идентифицированного сигнала когерентной помехи, генерируют гармонические сигналы с соответствующими найденным значениями амплитуды, частоты и фазы, вычисляют разностный цифровой сигнал каждой антенны , где М - число идентифицированных сигналов когерентной помехи, формируют и запоминают временной спектр каждого разностного цифрового сигнала  , усредняют по антеннам модули комплексных временных спектров , определяют по максимумам усредненного модуля число рассеянных сигналов в принятом многолучевом радиосигнале и фиксируют значения абсолютного доплеровского сдвига частоты ωр каждого р-го рассеянного сигнала, идентифицируют соответствующие отдельному максимуму усредненного модуля составляющие комплексного временного спектра
, усредняют по антеннам модули комплексных временных спектров , определяют по максимумам усредненного модуля число рассеянных сигналов в принятом многолучевом радиосигнале и фиксируют значения абсолютного доплеровского сдвига частоты ωр каждого р-го рассеянного сигнала, идентифицируют соответствующие отдельному максимуму усредненного модуля составляющие комплексного временного спектра  как рассеянный сигнал, принятый отдельной антенной
как рассеянный сигнал, принятый отдельной антенной  по идентифицированным рассеянным сигналам
по идентифицированным рассеянным сигналам  , определяют азимутально-угломестные направления прихода каждого рассеянного сигнала, выполняют обнаружение и находят оценку радиальной скорости воздушных объектов по значениям абсолютного доплеровского сдвига ωр и азимутально-угломестного направления приема рассеянных сигналов.
, определяют азимутально-угломестные направления прихода каждого рассеянного сигнала, выполняют обнаружение и находят оценку радиальной скорости воздушных объектов по значениям абсолютного доплеровского сдвига ωр и азимутально-угломестного направления приема рассеянных сигналов.
| US 7012552 В2, 14.03.2006 | |||
| Самоустанавливающийся патрон для метчиков, плашек, разверток и т.п. | 1941 |
|
SU63941A1 |
| СПОСОБ РАДИОКОНТРОЛЯ | 1999 |
|
RU2158002C1 |
| ШИРОКОПОЛОСНАЯ СТАНЦИЯ РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ С ВЫСОКОЙ ЧУВСТВИТЕЛЬНОСТЬЮ | 2008 |
|
RU2390946C2 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА МЕСТА ЦЕЛЕЙ ПРИ НАЛИЧИИ ОТРАЖЕНИЙ ПРИНИМАЕМОГО ЭХОСИГНАЛА ОТ ЗЕМНОЙ ПОВЕРХНОСТИ И ИМПУЛЬСНАЯ НАЗЕМНАЯ ТРЕХКООРДИНАТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2291464C2 |
| WO 2010040959 A1, 15.04.2010 | |||
| WO 2009115818 A2, 24.09.2009 | |||
| US 2009216498 A1, 27.08.2009. | |||

