Изобретение относится к радиотехнике и может быть использовано в системах контроля воздушного пространства с использованием прямых и рассеянных от воздушных объектов сигналов, излучаемых множеством неконтролируемых и контролируемых передатчиков радиоэлектронных систем различного назначения.
Достижение высокой эффективности обнаружения, локализации и идентификации воздушных объектов ограничивается существенной априорной неопределенностью размеров, ориентации в пространстве, отражающих свойств и параметров движения объектов, а также несовершенством известных способов обнаружения и слежения за воздушными объектами.
Технология пассивного обнаружения и слежения за воздушными объектами, использующая естественный подсвет воздушных целей, создаваемый на множестве частот радиоизлучениями передатчиков различного назначения в диапазонах коротких, метровых, дециметровых и сантиметровых волн: широковещательные (коммерческое FM-радиовещание, телевидение высокой четкости), информационные (связь) и измерительные (управление, навигация), пока еще не получила достаточного распространения, несмотря на то, что может существенно повысить скрытность и эффективность обнаружения, пространственной локализации и идентификации широкого класса подвижных объектов.
Известен способ обнаружения и пространственной локализации воздушных объектов [1], заключающийся в том, что
принимают решеткой антенн многочастотные радиосигналы в полосе приема, во много раз превышающей ширину спектра одиночного радиосигнала передатчика, формируют комплексные временные спектры радиосигналов каждой антенны и спектр мощности радиосигнала опорной антенны,
по спектру мощности радиосигнала опорной антенны обнаруживают сигналы передатчиков,
по комплексным временным спектрам формируют двумерные комплексные угловые спектры обнаруженных передатчиков,
по угловым спектрам определяют азимутальные и угломестные пеленги передатчиков,
а после сравнения угломестных пеленгов β с порогом разделяют передатчики на наземные и воздушные и определяют наклонную дальность R до передатчиков воздушных целей по формуле R=H/sinβ, где Н - известная высота полета цели.
Данный способ обеспечивает эффективное обнаружение воздушных объектов, оснащенных передатчиками радиосигналов. Однако в условиях радиомолчания данный способ теряет свою эффективность.
Более эффективным является способ обнаружения и пространственной локализации воздушных объектов [2], свободный от этого недостатка и выбранный в качестве прототипа. Согласно этому способу:
выбирают передатчик, излучающий радиосигнал с расширенным спектром,
синхронно принимают решеткой из N антенн многолучевой радиосигнал, включающий прямой радиосигнал передатчика и рассеянные объектами радиосигналы этого передатчика,
синхронно преобразуют ансамбль принятых антеннами радиосигналов в цифровые сигналы,
из цифровых сигналов формируют прямой и сжатые рассеянные сигналы,
сравнивают прямой и рассеянные сигналы и определяют временные задержки, доплеровские сдвиги и направления прихода рассеянных сигналов, по временным задержкам, доплеровским сдвигам и направлениям прихода выполняют обнаружение и пространственную локализацию воздушных объектов.
Способ-прототип не требует наличия на борту обнаруживаемого воздушного объекта передатчика, излучающего радиосигналы, так как обеспечивает обнаружение и слежение за воздушными объектами, используя естественный подсвет воздушных объектов, создаваемый на множестве частот радиоизлучениями передатчиков различного назначения. Эффективность способа-прототипа зависит от ряда факторов. Из которых наиболее важны геометрическое расположение источников излучения, их мощность и эффективная площадь рассеяния цели, а также эффективность операций подавления помех, маскирующих слабые рассеянные от целей сигналы.
Принятый многолучевой радиосигнал, как правило, включает мощные прямые сигналы и рассеянные от земной инфраструктуры компоненты сигнала выбранного передатчика. Кроме того, он содержит задержанные по времени и сдвинутые на частоту доплеровского смещения рассеянные воздушными объектами сигналы, а также сигналы других неконтролируемых источников, работающих на частоте, совпадающей с частотой приема. Для эффективного обнаружения и точной пространственной локализации широкого класса воздушных объектов (большие, средние, малые самолеты и беспилотные летательные аппараты, вертолеты, ракеты, спускаемые аппараты) необходимо качественное выделение слабых рассеянных от объектов сигналов на фоне мощного прямого сигнала выбранного передатчика, а также на фоне сигналов других нежелательных источников. В наиболее типичных ситуациях уровень помех на 40-60 дБ превышает уровень рассеянных сигналов.
Недостатками данного способа являются низкая помехоустойчивость и, как следствие, низкая чувствительность обнаружения и недостаточная точность пространственной локализации воздушных объектов.
Техническим результатом изобретения является повышение чувствительности обнаружения и точности пространственной локализации широкого класса воздушных объектов.
Повышение чувствительности обнаружения и точности локализации воздушных объектов достигается за счет:
- применения операций адаптивной пространственной фильтрации, обеспечивающих направленный прием полезного прямого радиосигнала передатчика подсвета с одновременным подавлением широкого класса помех, приходящих с других направлений;
- применения операций адаптивной пространственной фильтрации, обеспечивающих направленный прием полезного рассеянного сигнала с одновременным подавлением широкого класса помех, приходящих с других направлений;
- применения операций радиоэлектронной компенсации когерентной помехи от мощного прямого радиосигнала передатчика подсвета, маскирующего слабые рассеянные сигналы.
Технический результат достигается тем, что в способе обнаружения и пространственной локализации объектов, заключающемся в том, что выбирают передатчик, излучающий радиосигнал с расширенным спектром, синхронно принимают решеткой из N антенн многолучевой радиосигнал, включающий прямой радиосигнал передатчика и рассеянные объектами радиосигналы этого передатчика, согласно изобретению синхронно преобразуют ансамбль принятых антеннами радиосигналов в матричный цифровой сигнал  , который запоминают, из матричного цифрового сигнала формируют сигнал пространственной корреляционной матрицы входных сигналов
, который запоминают, из матричного цифрового сигнала формируют сигнал пространственной корреляционной матрицы входных сигналов  , сигнал корреляционной матрицы
, сигнал корреляционной матрицы  преобразуют в сигналы оптимальных весовых векторов для формирования прямого
преобразуют в сигналы оптимальных весовых векторов для формирования прямого  и рассеянных
и рассеянных  радиосигналов, где
радиосигналов, где  - вектор наведения, определяемый азимутально-угломестным направлением приема радиосигнала, длиной волны и геометрией решетки, преобразуют матричный цифровой сигнал
- вектор наведения, определяемый азимутально-угломестным направлением приема радиосигнала, длиной волны и геометрией решетки, преобразуют матричный цифровой сигнал  в прямой
в прямой  и рассеянные
и рассеянные  цифровые сигналы для выбранных азимутально-угломестных направлений приема, которые совместно со значением азимутально-угломестного направления приема запоминают, для каждого выбранного азимутально-угломестного направления приема формируют и запоминают зависящую от временного сдвига τ комплексную взаимно корреляционную функцию (ВКФ)
цифровые сигналы для выбранных азимутально-угломестных направлений приема, которые совместно со значением азимутально-угломестного направления приема запоминают, для каждого выбранного азимутально-угломестного направления приема формируют и запоминают зависящую от временного сдвига τ комплексную взаимно корреляционную функцию (ВКФ)  между прямым цифровым сигналом
между прямым цифровым сигналом  и рассеянным цифровым сигналом
и рассеянным цифровым сигналом  , определяют максимальное значение модуля
, определяют максимальное значение модуля  комплексной ВКФ и фиксируют соответствующее этому максимуму значение комплексной ВКФ
комплексной ВКФ и фиксируют соответствующее этому максимуму значение комплексной ВКФ  , вычисляют разностный рассеянный цифровой сигнал
, вычисляют разностный рассеянный цифровой сигнал  , формируют зависящую от временного τ и частотного F сдвигов комплексную двумерную взаимно корреляционную функцию (ДВКФ)
, формируют зависящую от временного τ и частотного F сдвигов комплексную двумерную взаимно корреляционную функцию (ДВКФ)  между разностным рассеянным цифровым сигналом
между разностным рассеянным цифровым сигналом  и цифровым прямым сигналом
и цифровым прямым сигналом  , по модулю комплексной ДВКФ
, по модулю комплексной ДВКФ  определяют число сжатых рассеянных сигналов, а также значения задержки по времени τξ и абсолютного доплеровского сдвига Fξ каждого ξ-го сжатого рассеянного сигнала, по значениям задержки τξ и абсолютного доплеровского сдвига Fξ и азимутально-угломестного направления приема сжатых рассеянных сигналов обнаруживают и определяют пространственные координаты воздушного объекта.
определяют число сжатых рассеянных сигналов, а также значения задержки по времени τξ и абсолютного доплеровского сдвига Fξ каждого ξ-го сжатого рассеянного сигнала, по значениям задержки τξ и абсолютного доплеровского сдвига Fξ и азимутально-угломестного направления приема сжатых рассеянных сигналов обнаруживают и определяют пространственные координаты воздушного объекта.
Операции способа поясняются чертежами:
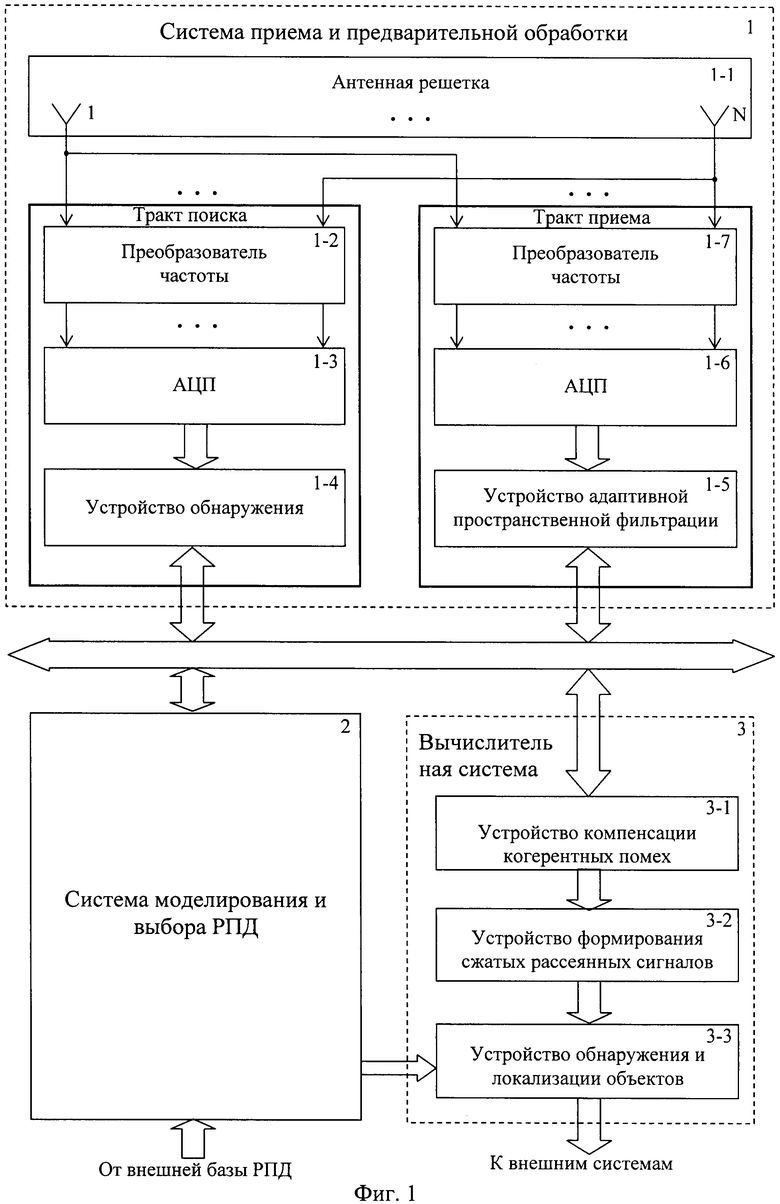
Фиг.1 - структурная схема устройства, реализующего предложенный способ обнаружения и локализации воздушных объектов;
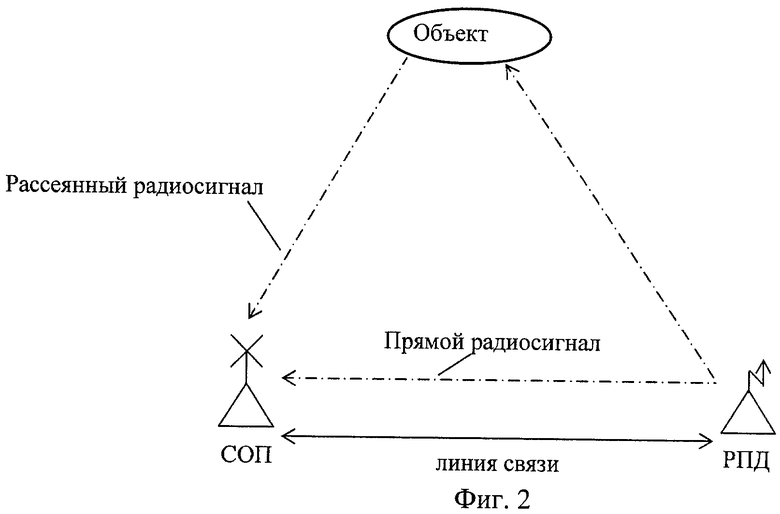
Фиг.2 - схема функционирования устройства, реализующего предложенный способ.
Устройство (фиг.1), в котором реализуется предложенный способ, содержит последовательно соединенные систему приема и предварительной обработки 1, систему моделирования и выбора радиопередатчиков (РПД) 2 и вычислительную систему 3.
В свою очередь, система приема и предварительной обработки 1 включает антенную решетку 1-1, тракт поиска источников подсвета, включающий преобразователь частоты 1-2, АЦП 1-3 и устройство обнаружения 1-4, а также тракт приема прямых и рассеянных сигналов, включающий преобразователь частоты 1-7, АЦП 1-6 и устройство адаптивной пространственной фильтрации 1-5.
Вычислительная система 3 включает устройство компенсации когерентных помех 3-1, устройство формирования сжатых рассеянных сигналов 3-2, устройство обнаружения и локализации объектов 3-3.
При этом система 2 соединена с входом устройства 3-3, а также имеет интерфейс для соединения с внешней базой РПД. Кроме того, устройство 3 имеет выход, предназначенный для подключения к внешним системам.
Подсистема 1 является аналогово-цифровым устройством и предназначена для поиска и измерения параметров синхронизации передатчиков подсвета объектов, излучающих радиосигналы с расширенным спектром, а также для адаптивной пространственной фильтрации полезных прямых и рассеянных радиосигналов.
Отметим, что после того как параметры синхронизации прямого радиосигнала выбранного передатчика подсвета измерены или когда они априорно известны, прямой радиосигнал передатчика может быть сформирован путем моделирования в системе 2.
Антенная решетка 1-1 состоит из N антенн с номерами  . Пространственная конфигурация антенной решетки должна обеспечивать измерение азимутально-угломестного направления прихода радиосигналов и может быть произвольной пространственной конфигурации: плоской прямоугольной, плоской кольцевой или объемной, в частности конформной. Для улучшения различения сигналов не только по пространству, но и по поляризации требуется существенное различие поляризационных откликов антенн решетки, то есть антенная решетка должна быть неоднородной (гетерогенной), то есть иметь антенные элементы с отличающимися векторными диаграммами направленности.
. Пространственная конфигурация антенной решетки должна обеспечивать измерение азимутально-угломестного направления прихода радиосигналов и может быть произвольной пространственной конфигурации: плоской прямоугольной, плоской кольцевой или объемной, в частности конформной. Для улучшения различения сигналов не только по пространству, но и по поляризации требуется существенное различие поляризационных откликов антенн решетки, то есть антенная решетка должна быть неоднородной (гетерогенной), то есть иметь антенные элементы с отличающимися векторными диаграммами направленности.
Преобразователи частоты 1-2 и 1-7 являются N-канальными, выполнены с общим гетеродином и с полосой пропускания каждого канала, изменяемой в соответствии с шириной спектра принимаемого радиосигнала. Общий гетеродин обеспечивает многоканальный когерентный прием сигналов.
АЦП 1-3 и 1-6 также является N-канальным и синхронизирован сигналом одного опорного генератора (для упрощения опорный генератор на схеме не показан). Если разрядность и быстродействие АЦП достаточны для непосредственного аналого-цифрового преобразования входных сигналов, как, например, в KB диапазоне, то вместо преобразователей частоты 1-2 и 1-7 могут использоваться частотно избирательные полосовые фильтры и усилители. Кроме того, преобразователи частоты 1-2 и 1-7 обеспечивают подключение одной из антенн вместо всех антенн решетки для периодической калибровки приемных каналов по внешнему источнику сигнала. Возможна калибровка с использованием внутреннего генератора, выход которого также подключается вместо всех антенн для периодической калибровки каналов.
Устройство обнаружения 1-4 и устройство адаптивной пространственной фильтрации 1-5 представляют собой вычислительные устройства.
Подсистема 2 является вычислительным устройством и предназначена для идентификации, отбора и периодического обновления передатчиков радиосигналов с расширенным спектром, используемых для подсвета заданной области воздушного пространства, а также для формирования модельных сигналов выбранных передатчиков.
Вычислительная система 3 предназначена для компенсации когерентных помех от прямого радиосигнала выбранного передатчика подсвета (устройство 3-1), корреляционного формирования сжатых рассеянных сигналов (устройство 3-2), обнаружения и формирования пространственных координат воздушных объектов (устройство 3-3).
Укрупненная схема функционирования устройства, реализующего предложенный способ обнаружения и локализации воздушных объектов, представлена на фиг.2. Схема включает передатчик РПД с известным местоположением, излучающий радиосигнал с расширенным спектром, а также станцию обнаружения-пеленгования (СОП). Радиосигнал передатчика РПД распространяется земной или поверхностной волной, которая принимается станцией обнаружения-пеленгования в виде прямого радиосигнала, а также облучающей заданную область воздушного пространства волной, принимаемой станцией обнаружения-пеленгования в виде рассеянных от воздушного объекта радиосигналов.
В станции обнаружения-пеленгования выполняется поиск, обнаружение и измерение параметров синхронизации радиосигналов с расширенным спектром, которые используются в системе моделирования 2 при регенерации или моделировании опорного сигнала для последующего разделения принятого станцией многолучевого рассеянного сигнала на отдельные лучи, т.е. при формировании сжатых рассеянных от воздушных объектов сигналов.
Передатчик РПД условно может быть отнесен к одному из классов: неконтролируемые (неуправляемые) и контролируемые (управляемые). Например, если передатчик РПД специально не создавался для совместной работы со станцией обнаружения-пеленгования и не имеет линий связи со станцией обнаружения-пеленгования, он может рассматриваться как неконтролируемый (неуправляемый). В качестве неконтролируемых передатчиков могут быть выбраны любые системы или устройства, излучающие в диапазонах коротких, метровых, дециметровых и сантиметровых волн радиосигналы с расширенным спектром и удовлетворяющие следующим требованиям: пространственное положение должно обеспечивать прямую видимость между передатчиком и системой обнаружения (если параметры радиосигнала с точностью до синхронизации априорно известны, то прямая видимость между передатчиком и системой обнаружения не требуется); частота и мощность излучаемого радиосигнала должны обеспечивать эффективное обнаружение широкого класса воздушных объектов. Примером неконтролируемых передатчиков могут быть передатчики связных, информационных и измерительных радиосистем различного назначения. Если передатчик РПД специально создан для решения задачи обнаружения воздушных объектов совместно со станцией обнаружения-пеленгования, то этот передатчик может быть отнесен к классу контролируемых (управляемых). При этом для управления режимами работы передатчика РПД предусмотрена линия связи (см. фиг.2) со станцией обнаружения-пеленгования.
Устройство работает следующим образом.
В системе 2 на основе данных внешней базы радиопередатчиков, а также данных об обнаруженных радиопередатчиках подсвета, поступающих от устройства 1-4, с использованием программных средств моделирования идентифицируется, выбирается и периодически обновляется совокупность передатчиков, излучающих радиосигналы с расширенным спектром. При моделировании оцениваются возможные зоны покрытия, вероятности обнаружения и достижимые точности локализации и идентификации воздушных объектов различного класса, которые могут быть обеспечены при различных вариантах размещения передатчиков относительно станции обнаружения-пеленгования. Кроме того, в системе 2 регенерируются принятые прямые радиосигналы или формируются модельные сигналы передатчиков с требуемыми параметрами синхронизации.
Параметры выбранного множества передатчиков (номер, несущая частота, ширина спектра, форма, параметры синхронизации и мощность излучаемого сигнала, координаты или расстояние и угловое положение относительно СОП) запоминаются в подсистеме 2, поступают в устройство 3-3, а также используются для настройки преобразователей 1-2 и 1-7. С целью упрощения цепи управления преобразователем не показаны.
По сигналам системы 2 преобразователь частоты 1-2 начинает перестраиваться с заданным темпом в заданном диапазоне частот поиска радиосигналов, например в диапазоне 10-1000 МГц. При этом тракт поиска осуществляет поиск и измерение параметров синхронизации передатчиков подсвета, излучающих радиосигналы с расширенным спектром, на частотах fk дискретной сетки частот поиска. При этом принятый каждым антенным элементом с номером n антенной решетки 1-1 зависящий от времени t радиосигнал xkn(t) фильтруется по частоте и переносится на более низкую частоту в преобразователе 1-2. Сформированный в преобразователе 1-2 ансамбль радиосигналов xkn(t) преобразуется с помощью АЦП 1-3 в цифровые сигналы, которые поступают в устройство обнаружения 1-4, в котором на каждой частоте fk дискретной сетки частот поиска осуществляется обнаружение и измерение параметров синхронизации передатчиков подсвета. Функционирование устройства обнаружения 1-4 основано на широко известных способах радиоконтроля, например [3].
Одновременно по сигналам системы 2 преобразователь частоты 1-7 перестраивается на заданную частоту приема fk. Тракт приема синхронно принимает на частоте fk многолучевой радиосигнал, включающий прямой радиосигнал выбранного передатчика с расширенным спектром и рассеянные объектами радиосигналы этого передатчика.
Принятый каждым антенным элементом с номером n антенной решетки 1-1 зависящий от времени t радиосигнал xn(t) фильтруется по частоте и переносится на более низкую частоту в преобразователе 1-7.
Сформированный в преобразователе 1-7 ансамбль радиосигналов xn(t) синхронно преобразуется с помощью АЦП 1-6 в матричный цифровой сигнал  ,
,
где z - номер временного отсчета сигнала, который поступает в устройство 1-5, где запоминается.
Кроме того, в устройстве 1-5 выполняются следующие действия:
- из матричного цифрового сигнала  формируется сигнал пространственной корреляционной матрицы входных сигналов
формируется сигнал пространственной корреляционной матрицы входных сигналов  ;
;
- сигнал корреляционной матрицы  преобразуется в сигналы оптимальных весовых векторов для формирования прямого
преобразуется в сигналы оптимальных весовых векторов для формирования прямого  и рассеянных
и рассеянных  радиосигналов, где
радиосигналов, где  - вектор наведения, определяемый азимутально-угломестным направлением приема радиосигнала, длиной волны (частотой fk) и геометрией решетки;
- вектор наведения, определяемый азимутально-угломестным направлением приема радиосигнала, длиной волны (частотой fk) и геометрией решетки;
- преобразуется матричный цифровой сигнал  в прямой
в прямой  и рассеянные
и рассеянные  цифровые сигналы для выбранных азимутально-угломестных направлений приема (α, β).
цифровые сигналы для выбранных азимутально-угломестных направлений приема (α, β).
Физически описанные операции адаптивной пространственной фильтрации обеспечивают одновременный направленный прием с заданных направлений полезного прямого сигнала выбранного передатчика подсвета и полезного рассеянного сигнала с одновременным подавлением широкого класса помех, приходящих с других направлений. Отметим, что технически реализуемая глубина подавления помехи достигает величины 40 дБ [4].
Это обеспечивает выигрыш в чувствительности при формировании слабых рассеянных сигналов на последующих этапах обработки.
Цифровые сигналы  и
и  совместно со значением азимутально-угломестного направления приема (α, β) рассеянного цифрового сигнала
совместно со значением азимутально-угломестного направления приема (α, β) рассеянного цифрового сигнала  поступают в устройство 3-1, где запоминаются.
поступают в устройство 3-1, где запоминаются.
Кроме того, в устройстве 3-1 для каждого выбранного азимутально-угломестного направления приема выполняются следующие действия:
- формируется зависящая от временного сдвига τ комплексная ВКФ  между прямым цифровым сигналом и рассеянным цифровым сигналом
между прямым цифровым сигналом и рассеянным цифровым сигналом  , которая запоминается;
, которая запоминается;
- определяется максимальное значение модуля  комплексной ВКФ и фиксируется соответствующее этому максимуму значение комплексной ВКФ
комплексной ВКФ и фиксируется соответствующее этому максимуму значение комплексной ВКФ  ;
;
- вычисляется разностный рассеянный цифровой сигнал  .
.
Эта операция является ключевой в задаче повышения чувствительности обнаружения и точности определения пространственных координат воздушных объектов. Физически данная операция обеспечивает вычитание из рассеянного цифрового сигнала когерентной помехи  , возникающей за счет просачивания прямого радиосигнала передатчика подсвета.
, возникающей за счет просачивания прямого радиосигнала передатчика подсвета.
Разностный рассеянный цифровой сигнал совместно с прямым цифровым сигналом  и значением азимутально-угломестного направления приема (α, β) рассеянного цифрового сигнала поступают в устройство 3-2.
и значением азимутально-угломестного направления приема (α, β) рассеянного цифрового сигнала поступают в устройство 3-2.
В устройстве 3-2 запоминается значение азимутально-угломестного направления приема (α, β) рассеянного цифрового сигнала, а также выполняются следующие действия:
- формируется зависящая от временного τ и частотного F сдвигов комплексная ДВКФ  между разностным рассеянным цифровым сигналом
между разностным рассеянным цифровым сигналом  и цифровым прямым сигналом .
и цифровым прямым сигналом .
Формирование комплексной ДВКФ выполняется во временной  или в частотной
или в частотной  ,
,  ,
,  областях, где Fz{…} - оператор дискретного преобразования Фурье;
областях, где Fz{…} - оператор дискретного преобразования Фурье;
- по модулю комплексной ДВКФ  определяют число сжатых рассеянных сигналов, а также значения задержки по времени τξ и абсолютного доплеровского сдвига Fξ каждого ξ-го сжатого рассеянного сигнала.
определяют число сжатых рассеянных сигналов, а также значения задержки по времени τξ и абсолютного доплеровского сдвига Fξ каждого ξ-го сжатого рассеянного сигнала.
Значения задержки по времени τξ, абсолютного доплеровского сдвига Fξ каждого ξ-го сжатого рассеянного сигнала и значение азимутально-угломестного направления приема (α, β) рассеянных сигналов поступают в устройство 3-3.
В устройстве 3-3 выполняется обнаружение и формируются пространственные координаты воздушных объектов по значениям задержки τξ, абсолютного доплеровского сдвига Fξ и азимутально-угломестного направления (α, β) приема сжатых рассеянных сигналов.
При этом выполняются следующие действия:
- сравниваются с порогом значения абсолютного доплеровского сдвига Fξ и угла места β ξ-го сжатого рассеянного сигнала и при превышении порога принимается решение об обнаружении воздушного объекта в азимутально-угломестном направлении (α, β).
Порог выбирается исходя из минимизации вероятности пропуска объекта.
При определении географических координат обнаруженного объекта в устройстве 3-3 выполняются следующие действия:
- по значению абсолютной задержки сигнала τξ определяется кажущаяся дальность до объекта D=τξс, где с - скорость света;
- определяются пространственные координаты обнаруженного объекта по кажущейся дальности D и значениям азимута α и угла места β приема рассеянных сигналов, например, в соответствии с [5].
При этом для пары «СОП - передатчик» строится эллипсоид равных кажущихся дальностей, соответствующих геометрическому месту точек в пространстве, сумма расстояний до которых (от передатчика до объекта и от объекта до СОП) равна найденному значению кажущейся дальности D. По пересечению эллипсоида равных кажущихся дальностей и значения направления (азимут α и угол места β) приема рассеянных сигналов определяются географические координаты обнаруженного объекта.
Результаты обнаружения и пространственной локализации воздушных объектов отображаются для повышения информативности.
Из приведенного описания следует, что устройство, реализующее предложенный способ, обеспечивает повышение чувствительности обнаружения и точности пространственной локализации широкого класса воздушных объектов благодаря:
- применению операций адаптивной пространственной фильтрации, обеспечивающих направленный прием полезного прямого радиосигнала передатчика подсвета и полезного рассеянного сигнала с одновременным подавлением широкого класса помех, приходящих с других направлений;
- применения операций радиоэлектронной компенсации когерентной помехи от мощного прямого радиосигнала передатчика подсвета, маскирующего слабые рассеянные сигналы.
Это в совокупности повышает чувствительность обнаружения и точность измерения пространственных координат широкого класса воздушных объектов.
Предложенный способ может быть отнесен к классу способов, реализующих основанную на естественной "радиоподсветке" воздушных целей технологию пассивного обнаружения и слежения за воздушными объектами без увеличения размеров приемных антенн, излучаемой мощности и числа используемых передатчиков.
Таким образом, за счет применения операций адаптивной пространственной фильтрации, обеспечивающих направленный прием полезного прямого радиосигнала передатчика подсвета и полезного рассеянного радиосигнала с одновременным подавлением широкого класса помех, приходящих с других направлений, а также операций радиоэлектронной компенсации мощного прямого радиосигнала передатчика подсвета, являющегося дополнительной когерентной помехой, маскирующей слабые рассеянные радиосигналы, удается решить поставленную задачу с достижением указанного технического результата.
Источники информации
1. RU, патент 2158002, кл. G01S 13/14, 2000 г.
2. US, патент 6703968 В2, кл. G01S 13/87, 2004 г.
3. RU, патент 2190236, кл. G01S 5/04, 2002 г.
4. Ратынский М.В. Адаптация и сверхразрешение в антенных решетках. М.: Радио и связь. 2003 г.
5. US, патент, 5719584 В2, кл. G01S 003/02, 1998 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПАССИВНОГО ОБНАРУЖЕНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2011 |
|
RU2472176C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПРОСТРАНСТВЕННОЙ ЛОКАЛИЗАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2010 |
|
RU2444754C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ЛОКАЛИЗАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2010 |
|
RU2444756C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ РАДИОМОЛЧАЩИХ ОБЪЕКТОВ | 2018 |
|
RU2716006C2 |
| СПОСОБ СКРЫТНОЙ РАДИОЛОКАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2014 |
|
RU2557250C1 |
| СПОСОБ СКРЫТНОЙ РАДИОЛОКАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2013 |
|
RU2529483C1 |
| СПОСОБ ДИСТАНЦИОННОГО МОНИТОРИНГА РАДИОМОЛЧАЩИХ ОБЪЕКТОВ | 2018 |
|
RU2723432C2 |
| СПОСОБ ПАССИВНОГО ОБНАРУЖЕНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2013 |
|
RU2542330C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПРОСТРАНСТВЕННОЙ ЛОКАЛИЗАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2013 |
|
RU2524401C1 |
| СПОСОБ ПАССИВНОГО ОБНАРУЖЕНИЯ И ПРОСТРАНСТВЕННОЙ ЛОКАЛИЗАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2011 |
|
RU2471200C1 |
Изобретение относится к радиотехнике и может быть использовано в системах контроля воздушного пространства с использованием прямых и рассеянных от воздушных объектов сигналов, излучаемых передатчиками радиоэлектронных систем различного назначения. Достигаемый технический результат изобретения - повышение чувствительности обнаружения и точности пространственной локализации широкого класса воздушных объектов. Указанный результат достигается за счет применения операций адаптивной пространственной фильтрации, обеспечивающих направленный прием полезного прямого радиосигнала передатчика подсвета и полезного рассеянного сигнала с одновременным подавлением широкого класса помех, приходящих с других направлений, а также операций радиоэлектронной компенсации когерентной помехи от мощного прямого радиосигнала передатчика подсвета, маскирующего слабые рассеянные сигналы. 2 ил.
Способ обнаружения и пространственной локализации воздушных объектов, заключающийся в том, что выбирают передатчик, излучающий радиосигнал с расширенным спектром, синхронно принимают решеткой из N антенн многолучевой радиосигнал, включающие прямой радиосигнал передатчика и рассеянные объектами радиосигналы этого передатчика, отличающийся тем, что синхронно преобразуют ансамбль принятых антеннами радиосигналов в матричный цифровой сигнал  , который запоминают, из матричного цифрового сигнала
, который запоминают, из матричного цифрового сигнала  формируют сигнал пространственной корреляционной матрицы входных сигналов
формируют сигнал пространственной корреляционной матрицы входных сигналов  , сигнал корреляционной матрицы
, сигнал корреляционной матрицы  преобразуют в сигналы оптимальных весовых векторов для формирования прямого
преобразуют в сигналы оптимальных весовых векторов для формирования прямого  и рассеянных
и рассеянных  радиосигналов, где
радиосигналов, где  - вектор наведения, определяемый азимутально-угломестным направлением приема радиосигнала, длиной волны и геометрией решетки, преобразуют матричный цифровой сигнал в прямой
- вектор наведения, определяемый азимутально-угломестным направлением приема радиосигнала, длиной волны и геометрией решетки, преобразуют матричный цифровой сигнал в прямой  и рассеянные
и рассеянные  цифровые сигналы для выбранных азимутально-угломестных направлений приема, которые совместно со значением азимутально-угломестного направления приема запоминают, где z - номер временного отсчета сигнала, (·)H - символ эрмитова сопряжения, для каждого выбранного азимутально-угломестного направления приема формируют и запоминают зависящую от временного сдвига τ комплексную взаимно корреляционную функцию (ВКФ)
цифровые сигналы для выбранных азимутально-угломестных направлений приема, которые совместно со значением азимутально-угломестного направления приема запоминают, где z - номер временного отсчета сигнала, (·)H - символ эрмитова сопряжения, для каждого выбранного азимутально-угломестного направления приема формируют и запоминают зависящую от временного сдвига τ комплексную взаимно корреляционную функцию (ВКФ)  между прямым цифровым сигналом
между прямым цифровым сигналом  и рассеянным цифровым сигналом
и рассеянным цифровым сигналом  , определяют максимальное значение модуля
, определяют максимальное значение модуля  комплексной ВКФ и фиксируют соответствующее этому максимуму значение комплексной ВКФ
комплексной ВКФ и фиксируют соответствующее этому максимуму значение комплексной ВКФ  , вычисляют разностный рассеянный цифровой сигнал
, вычисляют разностный рассеянный цифровой сигнал  , формируют зависящую от временного τ и частотного F сдвигов комплексную двумерную взаимно корреляционную функцию (ДВКФ)
, формируют зависящую от временного τ и частотного F сдвигов комплексную двумерную взаимно корреляционную функцию (ДВКФ)  между разностным рассеянным цифровым сигналом
между разностным рассеянным цифровым сигналом  и цифровым прямым сигналом
и цифровым прямым сигналом  , по модулю комплексной ДВКФ
, по модулю комплексной ДВКФ  определяют число сжатых рассеянных сигналов, а также значения задержки по времени τξ и абсолютного доплеровского сдвига Fξ каждого ξ-го сжатого рассеянного сигнала, по значениям задержки τξ и абсолютного доплеровского сдвига Fξ и азимутально-угломестного направления приема сжатых рассеянных сигналов обнаруживают и определяют пространственные координаты воздушного объекта.
определяют число сжатых рассеянных сигналов, а также значения задержки по времени τξ и абсолютного доплеровского сдвига Fξ каждого ξ-го сжатого рассеянного сигнала, по значениям задержки τξ и абсолютного доплеровского сдвига Fξ и азимутально-угломестного направления приема сжатых рассеянных сигналов обнаруживают и определяют пространственные координаты воздушного объекта.
| US 6703968 B2, 09.03.2004 | |||
| Самоустанавливающийся патрон для метчиков, плашек, разверток и т.п. | 1941 |
|
SU63941A1 |
| СПОСОБ РАДИОКОНТРОЛЯ | 1999 |
|
RU2158002C1 |
| ШИРОКОПОЛОСНАЯ СТАНЦИЯ РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ С ВЫСОКОЙ ЧУВСТВИТЕЛЬНОСТЬЮ | 2008 |
|
RU2390946C2 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА МЕСТА ЦЕЛЕЙ ПРИ НАЛИЧИИ ОТРАЖЕНИЙ ПРИНИМАЕМОГО ЭХОСИГНАЛА ОТ ЗЕМНОЙ ПОВЕРХНОСТИ И ИМПУЛЬСНАЯ НАЗЕМНАЯ ТРЕХКООРДИНАТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2291464C2 |
| WO 2010040959 A1, 15.04.2010 | |||
| WO 2009115818 A2, 24.09.2009 | |||
| US 7012552 B2, 14.03.2006. | |||

