Изобретение относится к радиотехнике и может быть использовано в системах контроля воздушного пространства с использованием прямых и рассеянных от воздушных объектов сигналов, излучаемых множеством неконтролируемых и контролируемых передатчиков радиоэлектронных систем различного назначения.
Достижение высокой эффективности обнаружения, локализации и идентификации воздушных объектов ограничивается существенной априорной неопределенностью размеров, ориентации в пространстве, отражающих свойств и параметров движения объектов, а также несовершенством известных способов обнаружения и слежения за воздушными объектами.
Технология пассивного обнаружения и слежения за воздушными объектами, использующая естественный подсвет воздушных целей, создаваемый на множестве частот радиоизлучениями передатчиков различного назначения в диапазонах коротких, метровых, дециметровых и сантиметровых волн: широковещательные (коммерческое FM-радиовещание, телевидение высокой четкости), информационные (связь) и измерительные (управление, навигация), пока еще не получила достаточного распространения, несмотря на то, что может существенно повысить скрытность и эффективность обнаружения, пространственной локализации и идентификации широкого класса подвижных объектов.
Известен способ обнаружения и пеленгования воздушных объектов [1], заключающийся в том, что
принимают решеткой антенн многочастотные радиосигналы в полосе приема, во много раз превышающей ширину спектра одиночного радиосигнала передатчика,
формируют комплексные временные спектры радиосигналов каждой антенны и спектр мощности радиосигнала опорной антенны,
по спектру мощности радиосигнала опорной антенны обнаруживают сигналы передатчиков,
по комплексным временным спектрам формируют двумерные комплексные угловые спектры обнаруженных передатчиков,
по угловым спектрам определяют азимутальные и угломестные пеленги передатчиков,
а после сравнения угломестных пеленгов β с порогом разделяют передатчики на наземные и воздушные и определяют наклонную дальность R до передатчиков воздушных целей по формуле R=H/sinβ, где H - известная высота полета цели.
Данный способ обеспечивает эффективное обнаружение воздушных объектов, оснащенных передатчиками радиосигналов. Однако в условиях радиомолчания данный способ теряет свою эффективность.
Более эффективным является способ обнаружения и пеленгования воздушных объектов [2], свободный от этого недостатка и выбранный в качестве прототипа.
Способ-прототип заключается в том, что выбирают передатчик, излучающий непрерывный монохроматический или амплитудно-модулированный радиосигнал, когерентно принимают решеткой из N антенн многолучевой радиосигнал xn(t), где n=1,…, N - номер антенного элемента, включающий прямой радиосигнал передатчика и рассеянные объектами радиосигналы этого передатчика, синхронно преобразуют ансамбль принятых антеннами радиосигналов в цифровые сигналы  , где z - номер временного отсчета сигнала, из цифровых сигналов каждой антенны
, где z - номер временного отсчета сигнала, из цифровых сигналов каждой антенны  получают и запоминают множество статистически независимых сигналов дискретного частотного представления ДЧП, весовым усреднением сигналов ДЧП отдельной антенны на каждой дискретной частоте находят комплексную величину, которую запоминают и предварительно идентифицируют как комплексную амплитуду дискретной гармонической составляющей (ДГС) дискретно-непрерывного спектра сигнала, используя комплексные амплитуды ДГС сигнала совместно с соответствующими сигналами ДЧП определяют дисперсионное отношение на каждой частоте, сравнивают дисперсионное отношение с порогом и принимают решение об обнаружении и области локализации сигнала по частоте, сравнивают амплитуду ДГС с порогом и принимают решение об обнаружении и области локализации рассеянного сигнала по частоте, для каждого обнаруженного рассеянного сигнала по запомненным комплексным амплитудам ДГС синтезируют пространственную спектральную плотность, по максимуму модуля пространственной спектральной плотности определяют его двумерный пеленг, по которому принимают решение об обнаружении воздушного объекта.
получают и запоминают множество статистически независимых сигналов дискретного частотного представления ДЧП, весовым усреднением сигналов ДЧП отдельной антенны на каждой дискретной частоте находят комплексную величину, которую запоминают и предварительно идентифицируют как комплексную амплитуду дискретной гармонической составляющей (ДГС) дискретно-непрерывного спектра сигнала, используя комплексные амплитуды ДГС сигнала совместно с соответствующими сигналами ДЧП определяют дисперсионное отношение на каждой частоте, сравнивают дисперсионное отношение с порогом и принимают решение об обнаружении и области локализации сигнала по частоте, сравнивают амплитуду ДГС с порогом и принимают решение об обнаружении и области локализации рассеянного сигнала по частоте, для каждого обнаруженного рассеянного сигнала по запомненным комплексным амплитудам ДГС синтезируют пространственную спектральную плотность, по максимуму модуля пространственной спектральной плотности определяют его двумерный пеленг, по которому принимают решение об обнаружении воздушного объекта.
Способ-прототип из известных способов борьбы с помехами использует только способ пространственной селекции на основе направленных свойств антенны и нетрадиционный способ частотной обработки, обеспечивающий фильтрацию сигналов на фоне помех по доплеровской частоте.
Однако принятый многолучевой радиосигнал, как правило, включает мощные прямые сигналы и отраженные от земной инфраструктуры компоненты сигнала выбранного передатчика, излучающего непрерывный монохроматический или амплитудно-модулированный радиосигнал. Кроме того, он содержит задержанные по времени и сдвинутые на частоту доплеровского смещения рассеянные воздушными объектами сигналы, а также сигналы других неконтролируемых источников, работающих на частоте, совпадающей с частотой приема. Для эффективного обнаружения и точной пространственной локализации широкого класса воздушных объектов (большие, средние, малые самолеты и беспилотные летательные аппараты, вертолеты, ракеты, спускаемые аппараты) необходимо качественное выделение слабых рассеянных объектами сигналов на фоне мощного прямого сигнала выбранного передатчика подсвета, а также на фоне сигналов других нежелательных источников. В наиболее типичных ситуациях уровень помех на 40-60 дБ превышает уровень отраженных сигналов.
Недостатком способа-прототипа является низкая помехоустойчивость, и, как следствие, низкая чувствительность обнаружения и недостаточная точность пеленгования воздушных объектов в условиях многолучевого распространения радиоволн.
Техническим результатом изобретения является повышение чувствительности обнаружения и точности пеленгования воздушных объектов в условиях многолучевого распространения радиоволн.
Повышение чувствительности обнаружения и точности пеленгования воздушных объектов в условиях многолучевого распространения радиоволн достигается за счет применения операций радиоэлектронной компенсации мощного прямого многолучевого радиосигнала передатчика подсвета, являющегося дополнительной когерентной помехой, маскирующей слабые рассеянные сигналы, путем идентификации и измерения параметров сигналов когерентных помех и вычитания сигналов когерентных помех из сигналов, принятых каждой антенной.
Технический результат достигается тем, что в способе обнаружения и пеленгования воздушных объектов, заключающемся в том, что выбирают передатчик, излучающий непрерывный монохроматический или амплитудно-модулированный радиосигнал, когерентно принимают решеткой из N антенн многолучевой радиосигнал, включающий прямой радиосигнал передатчика и рассеянные объектами радиосигналы этого передатчика, синхронно преобразуют ансамбль принятых антеннами радиосигналов в цифровые сигналы , где n=1,…, N - номер антенного элемента, z - номер временного отсчета сигнала, из цифровых сигналов каждой антенны получают и запоминают множество статистически независимых сигналов дискретного частотного представления (ДЧП), весовым усреднением сигналов ДЧП отдельной антенны на каждой дискретной частоте находят комплексную величину, которую запоминают и предварительно идентифицируют как комплексную амплитуду дискретной гармонической составляющей (ДГС) дискретно-непрерывного спектра сигнала, используя комплексные амплитуды ДГС сигнала совместно с соответствующими сигналами ДЧП определяют дисперсионное отношение на каждой частоте, сравнивают дисперсионное отношение с порогом и принимают решение об обнаружении и области локализации сигнала по частоте, сравнивают амплитуду ДГС с порогом, согласно изобретению при превышении порога идентифицируют эту ДГС как сигнал когерентной помехи, находят и фиксируют значение амплитуды, частоты и фазы идентифицированных сигналов когерентной помехи, генерируют гармонические сигналы  с соответствующими найденным значениями амплитуды, частоты и фазы, вычисляют разностный цифровой сигнал каждой антенны
с соответствующими найденным значениями амплитуды, частоты и фазы, вычисляют разностный цифровой сигнал каждой антенны  где M - число идентифицированных сигналов когерентной помехи, из разностных цифровых сигналов каждой антенны
где M - число идентифицированных сигналов когерентной помехи, из разностных цифровых сигналов каждой антенны  получают и запоминают множество статистически независимых модифицированных сигналов ДЧП, весовым усреднением модифицированных сигналов ДЧП отдельной антенны на каждой дискретной частоте находят комплексную величину, которую запоминают и предварительно идентифицируют как комплексную амплитуду ДГС спектра рассеянного сигнала, принятого n-й антенной, используя комплексные амплитуды ДГС спектра рассеянного сигнала совместно с соответствующими модифицированными сигналами ДЧП, определяют модифицированное дисперсионное отношение на каждой частоте, сравнивают модифицированное дисперсионное отношение с порогом и принимают решение об обнаружении рассеянного сигнала и фиксируют значение его абсолютного доплеровского сдвига частоты, для каждого обнаруженного рассеянного сигнала по запомненным комплексным амплитудам ДГС определяют азимутально-угломестные направления прихода, по азимутально-угломестному направлению прихода и значению абсолютного доплеровского сдвига частоты принимают решение об обнаружении воздушного объекта и находят оценку радиальной скорости обнаруженного воздушного объекта.
получают и запоминают множество статистически независимых модифицированных сигналов ДЧП, весовым усреднением модифицированных сигналов ДЧП отдельной антенны на каждой дискретной частоте находят комплексную величину, которую запоминают и предварительно идентифицируют как комплексную амплитуду ДГС спектра рассеянного сигнала, принятого n-й антенной, используя комплексные амплитуды ДГС спектра рассеянного сигнала совместно с соответствующими модифицированными сигналами ДЧП, определяют модифицированное дисперсионное отношение на каждой частоте, сравнивают модифицированное дисперсионное отношение с порогом и принимают решение об обнаружении рассеянного сигнала и фиксируют значение его абсолютного доплеровского сдвига частоты, для каждого обнаруженного рассеянного сигнала по запомненным комплексным амплитудам ДГС определяют азимутально-угломестные направления прихода, по азимутально-угломестному направлению прихода и значению абсолютного доплеровского сдвига частоты принимают решение об обнаружении воздушного объекта и находят оценку радиальной скорости обнаруженного воздушного объекта.
Операции способа поясняются следующими чертежами:
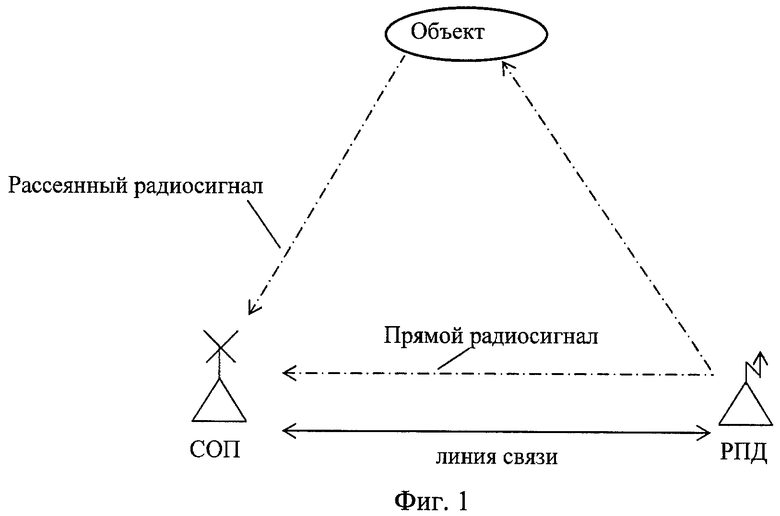
Фиг.1. Схема функционирования устройства, реализующего предложенный способ обнаружения и пеленгования воздушных объектов.
Фиг.2. Структурная схема устройства обнаружения и пеленгования объектов по излучениям их передатчиков.
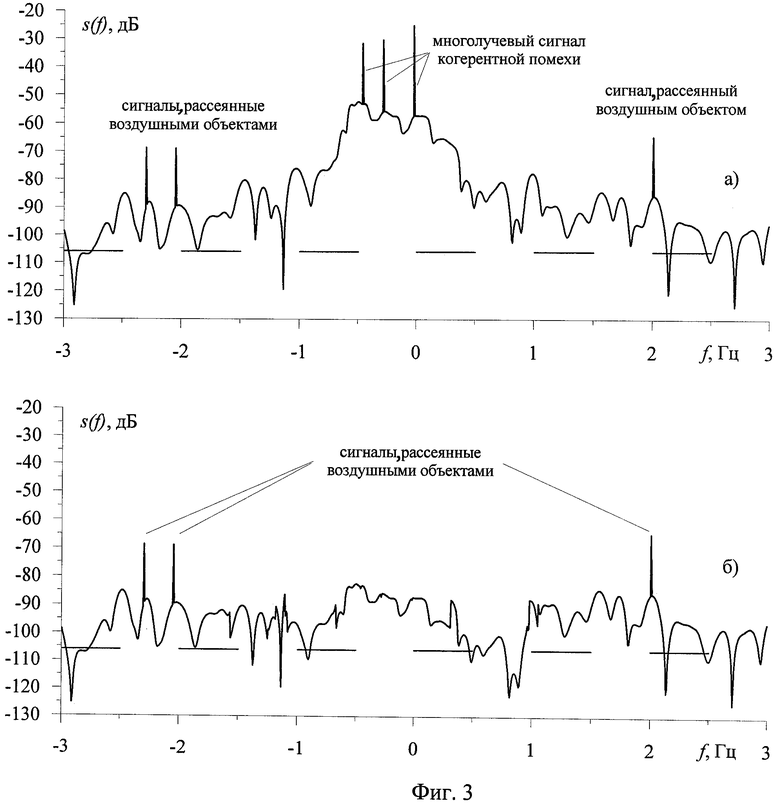
Фиг.3. Пример компенсации когерентной помехи от прямого сигнала передатчика подсвета.
Способ обнаружения и пеленгования воздушных объектов осуществляется следующим образом:
1. Выбирают передатчик, излучающий непрерывный монохроматический или амплитудно-модулированный радиосигнал;
2. Синхронно принимают решеткой из N антенн многолучевой радиосигнал xn(t), где n=1,…, N - номер антенного элемента, включающий прямой радиосигнал передатчика и рассеянные объектами радиосигналы этого передатчика;
3. Синхронно преобразуют ансамбль принятых антеннами радиосигналов xn(t) в цифровые сигналы , где z - номер временного отсчета сигнала;
4. Из цифровых сигналов каждой антенны получают и запоминают множество L статистически независимых сигналов ДЧП yn(l, f), где l - номер сигнала ДЧП, l=1,…, L, а f - номер частотного отсчета, f=1,…, P.
Для этого предварительно выполняют следующие действия:
- вычисляют и запоминают ВСВ функции Слепяна (собственные функции ядра Дирихле) Ul(Z, W; f) и собственные значения ядра Дирихле λl(Z, W) с использованием формулы

где W - порядок ВСВ функции,  , а количество используемых ВСВ функций совпадает с числом L формируемых сигналов ДЧП (обычно полагают L=5-6);
, а количество используемых ВСВ функций совпадает с числом L формируемых сигналов ДЧП (обычно полагают L=5-6);
- вычисляют и запоминают дискретные вытянутые сфероидальные последовательности  , получаемые с помощью ДПФ от дискретных ВСВ функций Ul(Z, W; f)
, получаемые с помощью ДПФ от дискретных ВСВ функций Ul(Z, W; f)


После этого, используя ДПФ с различными спектральными окнами, в качестве которых берут запомненные дискретные вытянутые сфероидальные последовательности различного порядка, формируют множество статистически независимых сигналов ДЧП по следующей формуле:
 .
.
В результате данной операции для каждой n-й антенны на каждой частоте f получают множество L сигналов ДЧП yn(l, f), где l=1,…, L, f=1,…, P.
Отметим, что при необходимости, например для повышения информативности обнаружения путем визуализации, с использованием полученных ДЧП yn(l, f) может быть определена спектральная плотность мощности сигнала, принятого каждой n-й антенной на каждой частоте f по следующей формуле:

5. Весовым усреднением сигналов ДЧП отдельной антенны yn(l, f) на каждой дискретной частоте f находят комплексную величину, которую запоминают и предварительно идентифицируют как комплексную амплитуду ДГС дискретно-непрерывного спектра сигнала, принятого n-й антенной на частоте f. Весовое усреднение сигналов ДЧП осуществляют путем выбора в качестве весового множителя ВСВ функции Слепяна Ul(Z, W; 0) на нулевой частоте:

Для повышения эффективности обнаружения и точности пеленгования определение комплексных амплитуд ДГС сигнала  осуществляют путем линейной регрессии в окрестности частоты f:
осуществляют путем линейной регрессии в окрестности частоты f:

6. Используя комплексные амплитуды ДГС сигнала совместно с соответствующими сигналами ДЧП yn(l, f), определяют для n-й антенны дисперсионное отношение на каждой частоте f:

Для повышения эффективности обнаружения определение дисперсионных отношений Fn(f) осуществляют путем линейной регрессии в окрестности частоты f:

7. Сравнивают дисперсионное отношение Fn(f) с порогом F0 и принимают решение об обнаружении и области локализации сигнала по частоте.
При этом порог F0 определяется по заданной вероятности, например 95%, с использованием F - статистики. Если Fn(f)>F0 (оценка значима) принимается решение об обнаружении сигнала, принятого n-й антенной на частоте f. В целях снижения вероятности ложной тревоги, окончательное решение об обнаружении сигнала на частоте f принимается, если оценки значимы на всех N антеннах решетки. Сигналы с частотами, на которых превышен порог, объединяют в сигнал и идентифицируют его как обнаруженный на частоте f0 сигнал с полосой δf;
8. Сравнивают амплитуду ДГС  с порогом;
с порогом;
9. При превышении порога идентифицируют эту ДГС  как сигнал когерентной помехи;
как сигнал когерентной помехи;
10. Находят и фиксируют значение амплитуды, частоты и фазы идентифицированных сигналов когерентной помехи;
11. Генерируют гармонические сигналы  с соответствующими найденными значениями амплитуды, частоты и фазы;
с соответствующими найденными значениями амплитуды, частоты и фазы;
12. Вычисляют разностный цифровой сигнал каждой антенны  где М - число идентифицированных сигналов когерентной помехи.
где М - число идентифицированных сигналов когерентной помехи.
Эта операция является ключевой в задаче повышения чувствительности обнаружения и точности пеленгования воздушных объектов в условиях многолучевого распространения радиоволн.
Физически данная операция обеспечивает вычитание из принятых каждой антенной сигналов, сигнала многолучевой когерентной помехи, возникающей за счет просачивания многолучевого прямого радиосигнала передатчика подсвета;
13. Из разностных цифровых сигналов каждой антенны  получают и запоминают множество статистически независимых модифицированных сигналов ДЧП;
получают и запоминают множество статистически независимых модифицированных сигналов ДЧП;
14. Из разностных цифровых сигналов каждой антенны  получают и запоминают множество L статистически независимых модифицированных сигналов ДЧП
получают и запоминают множество L статистически независимых модифицированных сигналов ДЧП  .
.
Пример компенсации реальной когерентной помехи от передатчика подсвета представлен на фиг.3. Из сравнения фиг.3а (спектральная плотность мощности сигнала ДЧП  до компенсации когерентной помехи) и фиг.3б (спектральная плотность мощности сигнала ДЧП
до компенсации когерентной помехи) и фиг.3б (спектральная плотность мощности сигнала ДЧП  после компенсации) следует, что за счет компенсации удается уменьшить уровень реальной когерентной помехи на 40-50 дБ;
после компенсации) следует, что за счет компенсации удается уменьшить уровень реальной когерентной помехи на 40-50 дБ;
15. Весовым усреднением модифицированных сигналов ДЧП отдельной антенны  на каждой дискретной частоте f находят комплексную величину, которую запоминают и предварительно идентифицируют как комплексную амплитуду ДГС спектра рассеянного сигнала, принятого n-й антенной на частоте f;
на каждой дискретной частоте f находят комплексную величину, которую запоминают и предварительно идентифицируют как комплексную амплитуду ДГС спектра рассеянного сигнала, принятого n-й антенной на частоте f;
16. Используя комплексные амплитуды ДГС спектра рассеянного сигнала совместно с соответствующими модифицированными сигналами ДЧП  , определяют модифицированное дисперсионное отношение на каждой частоте f:
, определяют модифицированное дисперсионное отношение на каждой частоте f:
17. Сравнивают модифицированное дисперсионное отношение  с порогом F0 и принимают решение об обнаружении рассеянного сигнала и фиксируют значение его абсолютного доплеровского сдвига частоты ωp.
с порогом F0 и принимают решение об обнаружении рассеянного сигнала и фиксируют значение его абсолютного доплеровского сдвига частоты ωp.
18. Для каждого обнаруженного рассеянного сигнала по запомненным комплексным амплитудам ДГС определяют азимутально-угломестные направления прихода.
При определении азимутально-угломестных направлений прихода рассеянных сигналов, например, с использованием способа [3], по комплексным амплитудам ДГС спектра рассеянного сигнала синтезируется комплексный двумерный угловой спектр, по максимумам модуля которого определяется азимутально-угломестное направление прихода (αp, βp) p-го рассеянного сигнала;
19. По азимутально-угломестному направлению прихода (αp, βp) p-го рассеянного сигнала и значению абсолютного доплеровского сдвига частоты ωp принимают решение об обнаружении воздушного объекта и находят оценку его радиальной скорости  , где λ - длина волны радиосигнала подсвета, θ - величина бистатического угла, то есть угла между направлением «передатчик - объект» и азимутально-угломестным направлением прихода p-го рассеянного сигнала (αp, βp) (направлением «объект - устройство обнаружения и пеленгования»).
, где λ - длина волны радиосигнала подсвета, θ - величина бистатического угла, то есть угла между направлением «передатчик - объект» и азимутально-угломестным направлением прихода p-го рассеянного сигнала (αp, βp) (направлением «объект - устройство обнаружения и пеленгования»).
Укрупненная схема функционирования устройства, реализующего предложенный способ обнаружения и пеленгования воздушных объектов, представлена на фиг.1. Схема включает передатчик РПД с известным местоположением, излучающий непрерывный монохроматический или амплитудно-модулированный радиосигнал, а также станцию обнаружения-пеленгования (СОП). Радиосигнал передатчика РПД распространяется земной или поверхностной волной, которые принимаются станцией обнаружения-пеленгования в виде прямого радиосигнала, а также облучающей заданную область воздушного пространства волной, принимаемой станцией обнаружения-пеленгования в виде рассеянных от воздушного объекта радиосигналов.
Передатчик РПД условно может быть отнесен к одному из классов: неконтролируемые (неуправляемые) и контролируемые (управляемые). Например, если передатчик РПД специально не создавался для совместной работы со станцией обнаружения-пеленгования и не имеют линий связи со станцией обнаружения-пеленгования, он может рассматриваться как неконтролируемый (неуправляемый). В качестве неконтролируемых передатчиков могут быть выбраны любые системы или устройства, излучающие в диапазонах коротких, метровых, дециметровых и сантиметровых волн непрерывные монохроматические или амплитудно-модулированные радиосигналы, удовлетворяющие следующим требованиям: пространственное положение, должно обеспечивать прямую видимость между передатчиком и системой обнаружения (если параметры радиосигнала с точностью до синхронизации априорно известны, то прямая видимость между передатчиком и системой обнаружения не требуется); частота и мощность излучаемого радиосигнала должны обеспечивать эффективное обнаружение широкого класса воздушных объектов. Примером неконтролируемых передатчиков могут быть передатчики связных, информационных и измерительных радиосистем различного назначения. Если передатчик РПД специально создан для решения задачи обнаружения воздушных объектов совместно со станцией обнаружения-пеленгования, то этот передатчик может быть отнесен к классу контролируемых (управляемых). При этом для управления режимами работы передатчика РПД предусмотрена линия связи (см. фиг.1) с СОП.
Устройство (фиг 2.), в котором реализуется предложенный способ, включает последовательно соединенные антенную систему 1, N-канальный преобразователь частоты 2, N-канальный аналого-цифровой преобразователь (АЦП) 3, вычислитель сигналов ДЧП 4, вычислитель комплексных амплитуд 5, вычислитель дисперсионных отношений 6, обнаружитель когерентной помехи 7, устройство компенсации когерентной помехи 8, вычислитель модифицированных сигналов ДЧП 9, вычислитель комплексных амплитуд рассеянных сигналов 10, вычислитель модифицированных дисперсионных отношений 11, обнаружитель рассеянных сигналов 12 и устройство обнаружения и определения параметров воздушных объектов 13.
Антенная система 1 содержит N антенн с номерами n=1…N, объединенных в решетку. Антенная решетка может быть произвольной пространственной конфигурации: линейной, плоской прямоугольной, плоской кольцевой или объемной, в частности конформной.
Преобразователь частоты 2 выполнен в N-канальном варианте с общим гетеродином и с полосой пропускания каждого канала, во много раз превышающей ширину спектра одиночного сигнала передатчика. Общий гетеродин обеспечивает N-канальный когерентный прием сигналов, что является основным условием регистрации относительной разности фаз сигналов, принимаемых совокупностью антенн. Кроме этого, преобразователь 2 обеспечивает калибровку по внутреннему источнику сигнала. При этом может быть использован генератор шума, выход которого также может подключаться вместо всех антенн для периодической калибровки каналов.
Если разрядность и быстродействие N-канального АЦП достаточны для непосредственного аналого-цифрового преобразования входных сигналов, как, например, при построении радиоизображения в KB диапазоне, то вместо преобразователя 2 могут использоваться частотно избирательный полосовой фильтр и усилитель. Другими словами, аналоговая часть устройства, реализующего предлагаемый способ, может быть построена по принципу прямого усиления.
Вычислители 4-6 и 9-11, обнаружители 7 и 12, а также устройства 8 и 13 построены по многоканальной схеме, которая обеспечивает максимальное быстродействие благодаря параллельной обработке сигналов.
Работает устройство, реализующее способ обнаружения и пеленгования воздушных объектов, следующим образом.
Многолучевой радиосигнал, включающий прямой радиосигнал передатчика, излучающего непрерывный монохроматический или амплитудно-модулированный радиосигнал, и рассеянные объектами радиосигналы этого передатчика когерентно принимается решеткой из N антенн и поступает на входы преобразователя 2, где когерентно переносятся на более низкую частоту.
С помощью АЦП 3 преобразованный по частоте ансамбль сигналов синхронно преобразуется в цифровые сигналы. Цифровые сигналы поступают на входы вычислителя сигналов ДЧП 4.
В вычислителе 4 из цифровых сигналов каждой антенны получается множество статистически независимых сигналов ДЧП. Полученное для каждой n-й антенны на каждой частоте множество сигналов ДЧП поступает на вход вычислителя комплексных амплитуд 5, где запоминается.
Кроме того, в вычислителе 5 весовым усреднением сигналов ДЧП отдельной антенны на каждой дискретной частоте находится комплексная величина, которая запоминается и предварительно идентифицируется как комплексная амплитуда ДГС дискретно-непрерывного спектра сигнала.
Полученные комплексные амплитуды ДГС совместно с соответствующими сигналами ДЧП поступают на вход вычислителя дисперсионных отношений 6.
В вычислителе 6 комплексные амплитуды ДГС сигнала совместно с соответствующими сигналами ДЧП используются для определения дисперсионного отношения на каждой частоте, которое поступает на вход обнаружителя 7.
В обнаружителе 7 сравнивается дисперсионное отношение с порогом и принимается решение об обнаружении и области локализации сигнала по частоте, сравнивается амплитуда ДГС с порогом и при превышении порога эта ДГС идентифицируется как сигнал когерентной помехи. Идентифицированные ДГС поступают в устройство компенсации когерентной помехи 8.
В устройстве 8 находятся и фиксируются значения амплитуды, частоты и фазы идентифицированных сигналов когерентной помехи, генерируются гармонические сигналы с соответствующими найденными значениями амплитуды, частоты и фазы, вычисляется разностный цифровой сигнал каждой антенны.
Разностные цифровые сигналы поступают в вычислитель модифицированных сигналов ДЧП 9.
В вычислителе 9 из разностных цифровых сигналов каждой антенны получается и запоминается множество статистически независимых модифицированных сигналов ДЧП, которое поступает в вычислитель комплексных амплитуд рассеянных сигналов 10.
В вычислителе 10 весовым усреднением модифицированных сигналов ДЧП отдельной антенны на каждой дискретной частоте находится комплексная величина, которая предварительно идентифицируется как комплексная амплитуда ДГС спектра рассеянного сигнала, принятого n-й антенной.
Идентифицированная как комплексная амплитуда ДГС спектра рассеянного сигнала поступает в вычислитель модифицированного дисперсионного отношения 11, где запоминается.
Кроме того, в вычислителе 11, используя комплексные амплитуды ДГС спектра рассеянного сигнала совместно с соответствующими модифицированными сигналами ДЧП, определяется модифицированное дисперсионное отношение на каждой частоте, которое совместно с комплексными амплитудами ДГС спектра рассеянного сигнала поступает в обнаружитель рассеянного сигнала 12.
В обнаружителе 12 сравнивается модифицированное дисперсионное отношение с порогом и принимается решение об обнаружении рассеянного сигнала, а также фиксируется значение его абсолютного доплеровского сдвига частоты. Кроме того, для каждого обнаруженного рассеянного сигнала по запомненным комплексным амплитудам ДГС определяются азимутально-угломестные направления прихода.
Найденные значения абсолютного доплеровского сдвига частоты и азимутально-угломестные направления прихода рассеянных сигналов поступают в устройство обнаружения и определения параметров воздушных объектов 13.
В устройстве 13 по азимутально-угломестному направлению прихода и значению абсолютного доплеровского сдвига частоты принимается решение об обнаружении воздушного объекта и находится оценка радиальной скорости воздушного объекта.
Таким образом, предложенный способ обеспечивает повышение чувствительности обнаружения и точности пеленгования воздушных объектов в условиях многолучевого распространения радиоволн за счет применения операций радиоэлектронной компенсации мощного прямого многолучевого радиосигнала передатчика подсвета, являющегося дополнительной когерентной помехой, маскирующей слабые рассеянные сигналы, путем идентификации и измерения параметров сигналов когерентных помех и вычитания сигналов когерентных помех из сигналов, принятых каждой антенной.
Источники информации
1. RU, патент, 2158002, кл. G01S 13/14, 2000 г.
2. RU, патент, 2309423, кл. G01S 5/02, 2007 г.
3. RU, патент, 2190236, кл. G01S 5/04, 2002 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ И ПЕЛЕНГОВАНИЯ ОБЪЕКТОВ ПО ИЗЛУЧЕНИЯМ ИХ ПЕРЕДАТЧИКОВ | 2005 |
|
RU2309423C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПЕЛЕНГОВАНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2010 |
|
RU2429501C1 |
| СПОСОБ ПАССИВНОГО РАДИОМОНИТОРИНГА ВОЗДУШНЫХ ОБЪЕКТОВ | 2010 |
|
RU2440588C1 |
| СПОСОБ РАДИОКОНТРОЛЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2010 |
|
RU2444753C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ЛОКАЛИЗАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2010 |
|
RU2444756C1 |
| СПОСОБ РАДИОКОНТРОЛЯ РАДИОМОЛЧАЩИХ ОБЪЕКТОВ | 2014 |
|
RU2572584C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПРОСТРАНСТВЕННОЙ ЛОКАЛИЗАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2010 |
|
RU2444755C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПРОСТРАНСТВЕННОЙ ЛОКАЛИЗАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2010 |
|
RU2444754C1 |
| СПОСОБ ПАССИВНОГО ОБНАРУЖЕНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2011 |
|
RU2472176C1 |
| СПОСОБ ПАССИВНОГО ОБНАРУЖЕНИЯ И ПРОСТРАНСТВЕННОЙ ЛОКАЛИЗАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2011 |
|
RU2471200C1 |

Изобретение относится к радиотехнике и может быть использовано в системах контроля воздушного пространства с использованием прямых и рассеянных от воздушных объектов сигналов, излучаемых множеством неконтролируемых и контролируемых передатчиков радиоэлектронных систем различного назначения. Достигаемым техническим результатом изобретения является повышение чувствительности обнаружения и точности пеленгования воздушных объектов в условиях многолучевого распространения радиоволн. Повышение чувствительности обнаружения и точности пеленгования воздушных объектов в условиях многолучевого распространения радиоволн достигается за счет применения операций радиоэлектронной компенсации мощного прямого многолучевого радиосигнала передатчика подсвета, являющегося дополнительной когерентной помехой, маскирующей слабые рассеянные сигналы, путем идентификации и измерения параметров сигналов когерентных помех и вычитания сигналов когерентных помех из сигналов, принятых каждой антенной. 3 ил.
Способ обнаружения и пеленгования воздушных объектов, заключающийся в том, что выбирают передатчик, излучающий непрерывный монохроматический или амплитудно-модулированный радиосигнал, когерентно принимают решеткой из N антенн многолучевой радиосигнал, включающий прямой радиосигнал передатчика и рассеянные объектами радиосигналы этого передатчика, синхронно преобразуют ансамбль принятых антеннами радиосигналов в цифровые сигналы  , где n=1,…, N - номер антенного элемента, z - номер временного отсчета сигнала, из цифровых сигналов каждой антенны получают и запоминают множество статистически независимых сигналов дискретного частотного представления (ДЧП), весовым усреднением сигналов ДЧП отдельной антенны на каждой дискретной частоте находят комплексную величину, которую запоминают и предварительно идентифицируют как комплексную амплитуду дискретной гармонической составляющей (ДГС) дискретно-непрерывного спектра сигнала, используя комплексные амплитуды ДГС сигнала совместно с соответствующими сигналами ДЧП, определяют дисперсионное отношение на каждой частоте, сравнивают дисперсионное отношение с порогом и принимают решение об обнаружении и области локализации сигнала по частоте, сравнивают амплитуду ДГС с порогом, отличающийся тем, что при превышении порога идентифицируют эту ДГС как сигнал когерентной помехи, находят и фиксируют значение амплитуды, частоты и фазы идентифицированных сигналов когерентной помехи, генерируют гармонические сигналы
, где n=1,…, N - номер антенного элемента, z - номер временного отсчета сигнала, из цифровых сигналов каждой антенны получают и запоминают множество статистически независимых сигналов дискретного частотного представления (ДЧП), весовым усреднением сигналов ДЧП отдельной антенны на каждой дискретной частоте находят комплексную величину, которую запоминают и предварительно идентифицируют как комплексную амплитуду дискретной гармонической составляющей (ДГС) дискретно-непрерывного спектра сигнала, используя комплексные амплитуды ДГС сигнала совместно с соответствующими сигналами ДЧП, определяют дисперсионное отношение на каждой частоте, сравнивают дисперсионное отношение с порогом и принимают решение об обнаружении и области локализации сигнала по частоте, сравнивают амплитуду ДГС с порогом, отличающийся тем, что при превышении порога идентифицируют эту ДГС как сигнал когерентной помехи, находят и фиксируют значение амплитуды, частоты и фазы идентифицированных сигналов когерентной помехи, генерируют гармонические сигналы  с соответствующими найденным значениями амплитуды, частоты и фазы, вычисляют разностный цифровой сигнал каждой антенны
с соответствующими найденным значениями амплитуды, частоты и фазы, вычисляют разностный цифровой сигнал каждой антенны  , где М - число идентифицированных сигналов когерентной помехи, из разностных цифровых сигналов каждой антенны
, где М - число идентифицированных сигналов когерентной помехи, из разностных цифровых сигналов каждой антенны  получают и запоминают множество статистически независимых модифицированных сигналов ДЧП, весовым усреднением модифицированных сигналов ДЧП отдельной антенны на каждой дискретной частоте находят комплексную величину, которую запоминают и предварительно идентифицируют как комплексную амплитуду ДГС спектра рассеянного сигнала, принятого n-й антенной, используя комплексные амплитуды ДГС спектра рассеянного сигнала совместно с соответствующими модифицированными сигналами ДЧП, определяют модифицированное дисперсионное отношение на каждой частоте, сравнивают модифицированное дисперсионное отношение с порогом и принимают решение об обнаружении рассеянного сигнала и фиксируют значение его абсолютного доплеровского сдвига частоты, для каждого обнаруженного рассеянного сигнала по запомненным комплексным амплитудам ДГС определяют азимутально-угломестные направления прихода, по азимутально-угломестному направлению прихода и значению абсолютного доплеровского сдвига частоты принимают решение об обнаружении воздушного объекта и находят оценку радиальной скорости воздушного объекта.
получают и запоминают множество статистически независимых модифицированных сигналов ДЧП, весовым усреднением модифицированных сигналов ДЧП отдельной антенны на каждой дискретной частоте находят комплексную величину, которую запоминают и предварительно идентифицируют как комплексную амплитуду ДГС спектра рассеянного сигнала, принятого n-й антенной, используя комплексные амплитуды ДГС спектра рассеянного сигнала совместно с соответствующими модифицированными сигналами ДЧП, определяют модифицированное дисперсионное отношение на каждой частоте, сравнивают модифицированное дисперсионное отношение с порогом и принимают решение об обнаружении рассеянного сигнала и фиксируют значение его абсолютного доплеровского сдвига частоты, для каждого обнаруженного рассеянного сигнала по запомненным комплексным амплитудам ДГС определяют азимутально-угломестные направления прихода, по азимутально-угломестному направлению прихода и значению абсолютного доплеровского сдвига частоты принимают решение об обнаружении воздушного объекта и находят оценку радиальной скорости воздушного объекта.
| СПОСОБ ОБНАРУЖЕНИЯ И ПЕЛЕНГОВАНИЯ ОБЪЕКТОВ ПО ИЗЛУЧЕНИЯМ ИХ ПЕРЕДАТЧИКОВ | 2005 |
|
RU2309423C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА | 2006 |
|
RU2323450C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ ОБЪЕКТОВ | 2001 |
|
RU2233456C2 |
| KR 20080024190 A, 17.03.2008 | |||
| US 7541973 B2, 02.06.2009 | |||
| US 6721678 B1, 13.04.2004 | |||
| Способ оценки непосредственных результатов лечения диссеминированного почечно-клеточного рака | 2020 |
|
RU2751086C1 |
| US 7012552 B2, 14.03.2006. | |||

