Изобретение относится к радиотехнике и может быть использовано в системах контроля наземного и воздушного пространства с использованием прямых и рассеянных объектами радиосигналов, излучаемых множеством неконтролируемых и контролируемых передатчиков радиоэлектронных систем различного назначения.
Достижение высокой эффективности обнаружения, локализации и идентификации наземных и воздушных объектов ограничивается существенной априорной неопределенностью размеров, ориентации в пространстве, отражающих свойств и параметров движения объектов, а также несовершенством известных способов обнаружения и слежения за подвижными объектами.
Технология пассивного обнаружения и слежения за подвижными объектами, использующая естественный радиоподсвет целей, создаваемый на множестве частот радиоизлучениями передатчиков различного назначения в диапазонах коротких, метровых, дециметровых и сантиметровых волн: широковещательные (коммерческое FM-радиовещание, телевидение высокой четкости), информационные (связь) и измерительные (управление, навигация), пока еще не получила достаточного распространения, несмотря на то, что может существенно повысить скрытность и эффективность обнаружения, пространственной локализации и идентификации широкого класса подвижных объектов.
Принятый радиосигнал, как правило, включает мощные прямые радиосигналы и рассеянные от земной инфраструктуры компоненты сигнала выбранного передатчика радиоподсвета целей. Кроме того, он содержит задержанные по времени и сдвинутые на частоту доплеровского смещения рассеянные объектами сигналы, а также сигналы других неконтролируемых источников, работающих на частоте, совпадающей с частотой приема. Для эффективного обнаружения и точной пространственной локализации широкого класса объектов (автомобили, корабли, самолеты и беспилотные летательные аппараты, вертолеты, ракеты, спускаемые аппараты) необходимо качественное выделение слабых рассеянных от объектов радиосигналов на фоне мощного прямого сигнала выбранного передатчика радиоподсвета, а также на фоне сигналов других нежелательных источников. В наиболее типичных ситуациях уровень помех на 40-60 дБ превышает уровень рассеянных сигналов.
Известен способ пассивного обнаружения и пространственной локализации подвижных объектов [1], заключающийся в том, что когерентно принимают радиосигналы двумя пространственно разнесенными приемными каналами, синхронно преобразуют принятые радиосигналы в комплексные цифровые сигналы, запоминают цифровые сигналы, из цифровых сигналов пары каналов для каждого ожидаемого направления прихода принятых радиосигналов формируют комплексную двухмерную взаимную корреляционную функцию, зависящую от временного и от частотного сдвигов принимаемых сигналов, выделяют центральную часть каждой комплексной взаимно корреляционной функции, преобразуют каждую выделенную центральную часть комплексной взаимно корреляционной функции в комплексную функцию взаимной спектральной плотности (ФВСП), из комплексных ФВСП формируют рассеянные объектами радиосигналы, по которым выполняют обнаружение и пространственную локализацию подвижных объектов.
Данный способ обладает ограниченной чувствительностью обнаружения и точностью пространственной локализации подвижных объектов в силу наличия только двух когерентных каналов приема.
Более эффективным является способ пассивного обнаружения и пространственной локализации подвижных объектов [2], свободный от этого недостатка и выбранный в качестве прототипа.
Согласно этому способу когерентно принимают пространственно разнесенными приемными каналами многолучевые радиосигналы, включающие излучаемый передатчиком подсвета прямой радиосигнал с расширенным спектром и рассеянные от объектов радиосигналы этого передатчика, синхронно преобразуют ансамбль принятых радиосигналов в комплексные цифровые сигналы, синхронно регистрируют комплексные цифровые сигналы, из цифровых сигналов пар каналов формируют комплексные двумерные взаимно корреляционные функции (ДВКФ), зависящие как от временного, так и от частотного сдвигов принятых сигналов, сдвигают по времени комплексную ДВКФ каждой пары каналов на величину, соответствующую каждому ожидаемому направлению m прихода принятых прямого и отраженных от объектов радиосигналов, для каждого ожидаемого направления прихода m выделяют центральные двухмерные части сдвинутых ДВКФ, усредняют выделенные для m-го направления прихода центральные двухмерные части сдвинутых комплексных ДВКФ, преобразуют усредненную ДВКФ в комплексный цифровой сигнал m-го направления, формируют зависящую от временного и частотного сдвигов результирующую комплексную ДВКФ между прямым цифровым сигналом передатчика и цифровым сигналом m-го направления, определяют по максимумам модуля результирующей ДКФВ число сжатых сигналов m-го направления и фиксируют значения задержки по времени и абсолютного доплеровского сдвига каждого сжатого сигнала, идентифицируют соответствующие отдельному максимуму модуля результирующей ДКФВ составляющие комплексной ДКФВ как сжатый по времени и частоте сигнал m-го направления, запоминают значения задержки по времени, абсолютного доплеровского сдвига и азимутально-угломестное направление прихода каждого сжатого сигнала, обнаруживают и определяют пространственные координаты воздушных объектов по значениям задержки и абсолютного доплеровского сдвига и азимутально-угломестного направления прихода.
Наиболее существенным фактором, ограничивающим эффективность способа-прототипа, является отсутствие операций, подавления прямого радиосигнала передатчика подсвета, как правило, на 40-60 дБ превышающего уровень рассеянных объектами радиосигналов.
В связи с этим основной недостаток способа-прототипа (низкая чувствительность обнаружения и ограниченная точность пространственной локализации объектов) может быть устранен применением операций обработки принимаемых радиосигналов, ослабляющих мешающее воздействие мощного прямого радиосигнала передатчика подсвета, являющегося когерентной помехой при приеме слабых рассеянных объектами радиосигналов.
Техническим результатом изобретения является повышение дальности обнаружения и точности пространственной локализации объектов.
Повышение дальности обнаружения и точности пространственной локализации объектов достигается за счет введения новых операций обработки принимаемых радиосигналов, обеспечивающих снижение мешающего воздействия мощного прямого радиосигнала передатчика подсвета путем его сжатия и последующей двумерной режекции в частотно-временной области.
Технический результат достигается тем, что в способе пассивного обнаружения и пространственной локализации подвижных объектов, заключающемся в том, что когерентно принимают пространственно разнесенными приемными каналами многолучевые радиосигналы, включающие излучаемый передатчиком подсвета прямой радиосигнал с расширенным спектром и рассеянные объектами радиосигналы этого передатчика, синхронно преобразуют ансамбль принятых радиосигналов в комплексные цифровые сигналы, синхронно регистрируют комплексные цифровые сигналы, из цифровых сигналов пар каналов формируют комплексные двумерные взаимно корреляционные функции (ДВКФ), зависящие как от временного, так и от частотного сдвигов принятых сигналов, сдвигают по времени комплексную ДВКФ каждой пары каналов на величину, соответствующую каждому ожидаемому направлению m прихода принятых прямого и рассеянных от объектов радиосигналов, выделяют центральные двухмерные части сдвинутых ДВКФ, усредняют выделенные для m-го направления прихода центральные двухмерные части сдвинутых комплексных ДВКФ, согласно изобретению преобразуют усредненную ДВКФ в комплексный цифровой сигнал m-го направления, который запоминают, идентифицируют сформированный для совпадающего с направлением на передатчик подсвета комплексный цифровой сигнал как прямой комплексный цифровой сигнал, для каждого m-го направления формируют зависящую от временного и частотного сдвигов результирующую комплексную ДВКФ между прямым цифровым сигналом передатчика и цифровым сигналом m-го направления, исключают центральную часть комплексной ДВКФ и получают сигнал модифицированной комплексной ДВКФ, из сигнала модифицированной комплексной ДВКФ и прямого комплексного цифрового сигнала формируют модифицированный рассеянный комплексный цифровой сигнал, формируют зависящий от временного и частотного сдвигов результирующий сигнал комплексной ДВКФ между модифицированным рассеянным комплексным цифровым сигналом и прямым комплексным цифровым сигналом, определяют по максимумам модуля результирующего сигнала комплексной ДВКФ число сжатых рассеянных сигналов m-го направления и фиксируют значения задержки по времени, абсолютного доплеровского сдвига и азимутально-угломестное направление прихода каждого сжатого рассеянного сигнала, по которым выполняют обнаружение и определение пространственных координат воздушных объектов.
Операции способа поясняются чертежом.
Способ пассивного обнаружения и пространственной локализации подвижных объектов осуществляется следующим образом:
1) Когерентно принимают пространственно разнесенными приемными каналами многолучевые радиосигналы, включающие излучаемый передатчиком подсвета прямой радиосигнал с расширенным спектром и рассеянные объектами радиосигналы этого передатчика.
В результате формируется ансамбль радиосигналов xn(t), зависящих от времени t, где n=1, …, N - номер антенны приемного канала.
2) Синхронно преобразуют ансамбль принятых радиосигналов xn(t) в комплексные цифровые сигналы  , где z - номер временного отсчета сигнала.
, где z - номер временного отсчета сигнала.
3) Синхронно регистрируют комплексные цифровые сигналы  .
.
4) Из цифровых сигналов пар каналов формируют комплексные двумерные взаимно корреляционные функции (ДВКФ)  , зависящие как от временного τ, так и от частотного F сдвигов принятых сигналов.
, зависящие как от временного τ, так и от частотного F сдвигов принятых сигналов.
При этом в силу того, что, например,  не несет дополнительной информации по сравнению с
не несет дополнительной информации по сравнению с  , формирование выполняют только для пар каналов, номера которых удовлетворяют условию n<n', n=1, …, N, n'=1, …, N. Так, если n=1, то n'=2, 3, …, а если n=2, то n'=3, 4, … и т.д.
, формирование выполняют только для пар каналов, номера которых удовлетворяют условию n<n', n=1, …, N, n'=1, …, N. Так, если n=1, то n'=2, 3, …, а если n=2, то n'=3, 4, … и т.д.
Формирование комплексных ДВКФ выполняют во временной или в частотной областях известными способами [3, стр.95].
В первом случае формирование комплексных ДВКФ выполняют по следующей формуле:

n<n',
где  означает комплексное сопряжение.
означает комплексное сопряжение.
Во втором случае из сигналов  получают комплексные временные спектры
получают комплексные временные спектры  , где Fz{…} - оператор дискретного преобразования Фурье (ДПФ) по времени, как известно, эффективно вычисляемого на основе алгоритма быстрого преобразования Фурье, k=0, …, K-1 - номер частотного отсчета, а формирование комплексных ДВКФ выполняют по следующей формуле:
, где Fz{…} - оператор дискретного преобразования Фурье (ДПФ) по времени, как известно, эффективно вычисляемого на основе алгоритма быстрого преобразования Фурье, k=0, …, K-1 - номер частотного отсчета, а формирование комплексных ДВКФ выполняют по следующей формуле:

n<n',
где ωk - частота, соответствующая k-му частотному отсчету.
В результате выполнения данной операции получают N(N-1)/2 комплексных ДВКФ.
5) Сдвигают по времени комплексную ДВКФ каждой пары каналов  на величину
на величину  , соответствующую каждому ожидаемому направлению m=1, …, M прихода принятых прямого и рассеянных от объектов радиосигналов.
, соответствующую каждому ожидаемому направлению m=1, …, M прихода принятых прямого и рассеянных от объектов радиосигналов.
Сдвиг выполняют по следующим формулам:
 ,
,
 ,
,
 , где
, где  - оператор обратного ДПФ.
- оператор обратного ДПФ.
Значения временных сдвигов, соответствующие каждому ожидаемому направлению прихода сигналов, например, для кольцевой антенной решетки вычисляют по следующей формуле:

где R - радиус решетки, c - скорость света, h=0…H-1 - текущий номер узла сетки наведения решетки по углу места.
В результате выполнения описанных операций получают MN(N-1)/2 сдвинутых комплексных ДВКФ 
6) Для каждого ожидаемого направления прихода m выполняют следующие действия:
- выделяют центральные двухмерные части  сдвинутых ДВКФ
сдвинутых ДВКФ
Параметры Δ и Θ выбирают исходя из необходимости подавления шумов и определяющих уровень взаимных помех побочных пиков ДВКФ.
Данную операцию можно рассматривать как операцию применения двухмерного окна, имеющего квадратную или прямоугольную опорную область, к комплексной ДВКФ  Применение двухмерного окна к комплексной ДВКФ
Применение двухмерного окна к комплексной ДВКФ  эквивалентно двухмерной фильтрации комплексного цифрового сигнала, формируемого на последующих этапах. Эту фильтрацию можно также рассматривать как двухмерную фильтрацию комплексного цифрового сигнала в корреляционной области;
эквивалентно двухмерной фильтрации комплексного цифрового сигнала, формируемого на последующих этапах. Эту фильтрацию можно также рассматривать как двухмерную фильтрацию комплексного цифрового сигнала в корреляционной области;
- усредняют выделенные для m-го направления прихода центральные двухмерные части сдвинутых комплексных ДВКФ
- преобразуют усредненную ДВКФ  в комплексный цифровой сигнал m-го направления
в комплексный цифровой сигнал m-го направления
Комплексный цифровой сигнал m-го направления  запоминают.
запоминают.
В результате выполнения описанных операций получают M комплексных цифровых сигналов .
Отметим, что направление прихода прямого радиосигнала от передатчика подсвета, как правило, априорно известно, так как передатчики подсвета выбирают заранее исходя из следующих критериев: известное пространственное размещение, тип, частота и мощность излучаемого радиосигнала; отсутствие взаимных интерференционных помех на рабочей частоте передатчика.
При необходимости направление прихода прямого радиосигнала может быть уточнено сравнением модулей цифровых сигналов, полученных для направлений, смежных с априорно известным направлением m', например, 

 Это может потребоваться в условиях многолучевого распространения радиоволн. Например, при использовании в качестве источника подсвета радиопередатчика KB диапазона, удаленного на расстояние 300-1000 км. На таких расстояниях радиосигнал передатчика распространяется ионосферной волной, направление прихода которой может отличаться от ожидаемого.
Это может потребоваться в условиях многолучевого распространения радиоволн. Например, при использовании в качестве источника подсвета радиопередатчика KB диапазона, удаленного на расстояние 300-1000 км. На таких расстояниях радиосигнал передатчика распространяется ионосферной волной, направление прихода которой может отличаться от ожидаемого.
Эту операцию можно рассматривать как обобщение традиционно применяемой в одномерном случае операции поиска направления прихода сигнала по максимуму диаграммы направленности антенной решетки.
При этом используется однозначная связь номера M=1, …, M комплексных цифровых сигналов  с ожидаемым азимутально-угломестным направлением прихода (α, β) принятых прямых и отраженных радиосигналов, которые, в свою очередь, как отмечалось ранее, являются направлениями наведения антенной решетки;
с ожидаемым азимутально-угломестным направлением прихода (α, β) принятых прямых и отраженных радиосигналов, которые, в свою очередь, как отмечалось ранее, являются направлениями наведения антенной решетки;
7) Идентифицируют сформированный для совпадающего с направлением m' на передатчик подсвета комплексный цифровой сигнал как прямой комплексный цифровой сигнал 
8) Для каждого ожидаемого направления прихода m выполняют следующие действия:
- формируют зависящую от временного τ и частотного F сдвигов результирующую комплексную ДВКФ  между прямым цифровым сигналом передатчика
между прямым цифровым сигналом передатчика  и цифровым сигналом m-го направления.
и цифровым сигналом m-го направления.
Формирование выполняют во временной
 или в частотной
или в частотной


 областях.
областях.
Из формулы  следует, что физически данная операция эквивалентна свертке спектров сигналов и
следует, что физически данная операция эквивалентна свертке спектров сигналов и  при фиксированном значении временного сдвига τ. В результате прямой сигнал от передатчика подсвета сжимается по спектру в одну гармоническую составляющую, концентрирующуюся в области нулевого частотного и временного сдвига;
при фиксированном значении временного сдвига τ. В результате прямой сигнал от передатчика подсвета сжимается по спектру в одну гармоническую составляющую, концентрирующуюся в области нулевого частотного и временного сдвига;
- исключают центральную часть комплексной ДВКФ  и получают сигнал модифицированной комплексной ДВКФ
и получают сигнал модифицированной комплексной ДВКФ 
Параметры Δ и Θ выбирают исходя из необходимости подавления прямого сигнала от передатчика подсвета, являющегося помехой при последующем выделении слабых рассеянных от целей сигналов.
Данную операцию можно рассматривать как операцию применения двумерного окна к комплексной ДВКФ . Эту операцию можно также рассматривать как двухмерную режекцию прямого цифрового сигнала передатчика в корреляционной области;
- из сигнала модифицированной комплексной ДВКФ  и прямого комплексного цифрового сигнала
и прямого комплексного цифрового сигнала  формируют модифицированный рассеянный комплексный цифровой сигнал
формируют модифицированный рассеянный комплексный цифровой сигнал 
При формировании модифицированного рассеянного комплексного цифрового сигнала  выполняются следующие действия:
выполняются следующие действия:
а) суммируют значения сигнала модифицированной комплексной ДВКФ  для получения сигнала
для получения сигнала  ;
;
б) выполняют обратное ДПФ сигнала и получают сигнал 
в) сигнал  умножают на комплексно сопряженный прямой цифровой сигнал
умножают на комплексно сопряженный прямой цифровой сигнал  и получают модифицированный рассеянный комплексный цифровой сигнал
и получают модифицированный рассеянный комплексный цифровой сигнал 
Возможен другой способ, при котором формирование модифицированного рассеянного комплексного цифрового сигнала  осуществляют по формуле
осуществляют по формуле 
Этот способ обеспечивает более высокую устойчивость к амплитудным флуктуациям сигналов;
Описанные операции являются основополагающими для повышения чувствительности обнаружения и точности измерения параметров рассеянных сигналов;
- формируют зависящий от временного τ и частотного F сдвигов результирующий сигнал комплексной ДВКФ  между модифицированным рассеянным комплексным цифровым сигналом
между модифицированным рассеянным комплексным цифровым сигналом  и прямым комплексным цифровым сигналом
и прямым комплексным цифровым сигналом 
- определяют по максимумам модуля  результирующего сигнала комплексной ДВКФ число сжатых рассеянных сигналов m-го направления и фиксируют значения задержки по времени τpm, абсолютного доплеровского сдвига Fpm и азимутально-угломестное направление прихода (αpm, βpm) каждого p-го сжатого рассеянного сигнала, по которым выполняют обнаружение и определение пространственных координат воздушных объектов.
результирующего сигнала комплексной ДВКФ число сжатых рассеянных сигналов m-го направления и фиксируют значения задержки по времени τpm, абсолютного доплеровского сдвига Fpm и азимутально-угломестное направление прихода (αpm, βpm) каждого p-го сжатого рассеянного сигнала, по которым выполняют обнаружение и определение пространственных координат воздушных объектов.
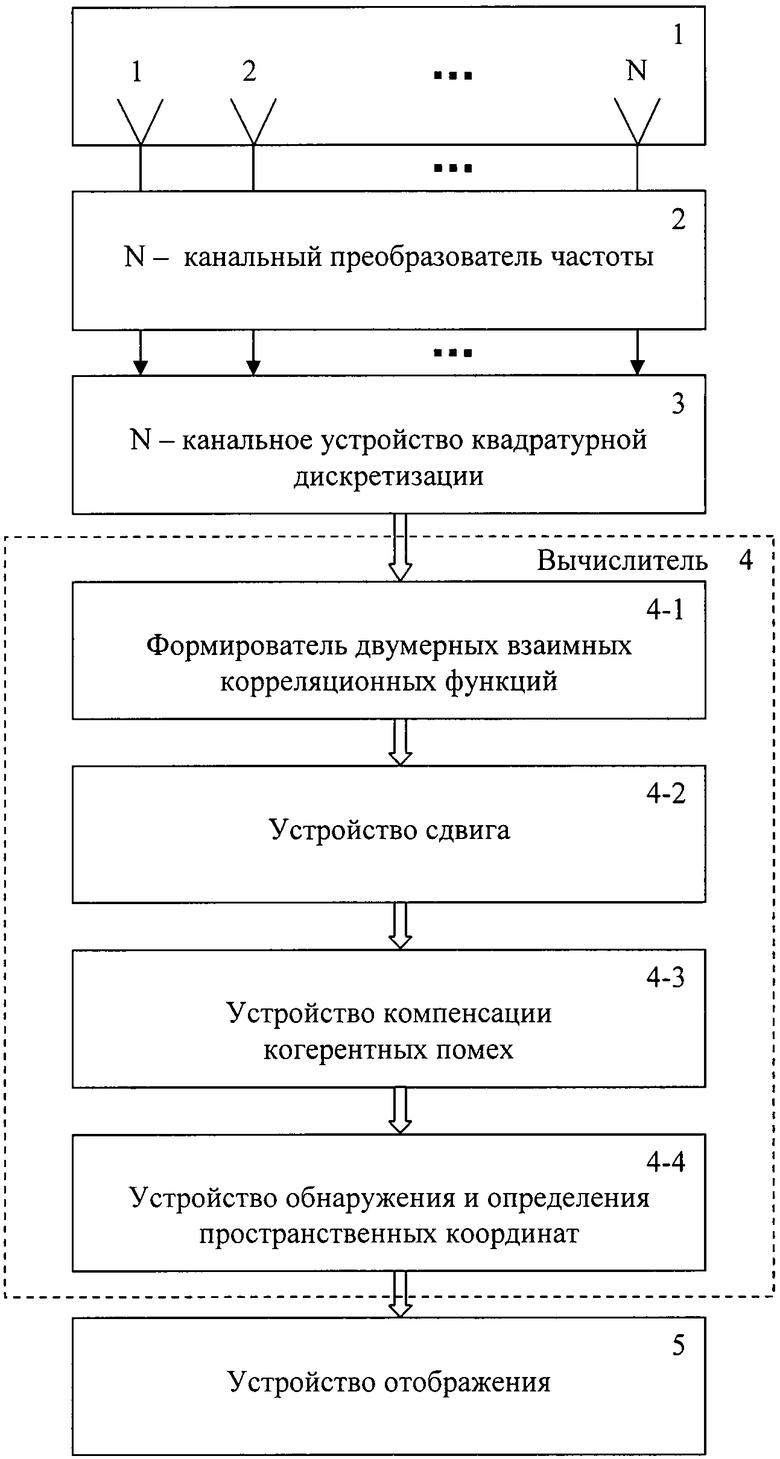
Устройство, в котором реализуется предложенный способ, включает последовательно соединенные антенную систему 1, N-канальный преобразователь частоты (ПРЧ) 2, N-канальное устройство квадратурной дискретизации 3, вычислитель 4 и устройство отображения 5.
В свою очередь вычислитель 4 включает формирователь двумерных взаимных корреляционных функций 4-1, устройство сдвига 4-2, устройство компенсации когерентных помех 4-3, устройство обнаружения и определения пространственных координат 4-4.
Формирователь двумерных взаимных корреляционных функций 4-1, устройство сдвига 4-2, устройство компенсации когерентных помех 4-3, устройство обнаружения и определения пространственных координат 4-4 могут быть выполнены в одноканальном или многоканальном вариантах. Рассмотрим многоканальный вариант, обеспечивающий максимально возможное быстродействие обнаружения и пространственную локализацию подвижных объектов.
Антенная система 1 содержит N антенн с номерами n=1…N, объединенных в решетку. Антенная решетка может быть произвольной пространственной конфигурации: плоской прямоугольной, плоской кольцевой или объемной, в частности, конформной.
Полоса пропускания каждого канала многоканального ПРЧ 2 обеспечивает одновременный прием множества сложных сигналов. Кроме того, многоканальные ПРЧ 2 и устройство 3 выполнены с общим гетеродином, который обеспечивает когерентный прием радиосигналов. Для периодической калибровки каналов по внешнему источнику сигнала с целью устранения их амплитудно-фазовой неидентичности ПРЧ 2 обеспечивает подключение одной из антенн, вместо всех антенн решетки. Возможна калибровка по внутреннему источнику сигнала. При этом может быть использован генератор шума, выход которого также может подключаться вместо всех антенн для периодической калибровки каналов. Если разрядность и быстродействие АЦП, входящих в состав устройства 3, достаточны для непосредственного аналого-цифрового преобразования входных сигналов, как, например, при построении изображения в KB диапазоне, то вместо ПРЧ 2 могут использоваться частотно-избирательный полосовой фильтр и усилитель. Другими словами, аналоговая часть устройства, реализующего предлагаемый способ, может быть построена по принципу прямого усиления.
Устройство, реализующее предложенный способ, работает следующим образом.
Многолучевые радиосигналы, включающие излучаемый передатчиком подсвета прямой радиосигнал с расширенным спектром и отраженные от объектов радиосигналы этого передатчика когерентно принимают пространственно разнесенными приемными антеннами решетки 1. Принятый каждой антенной решетки 1 зависящий от времени t суммарный радиосигнал xn(t) в ПРЧ 2 когерентно переносится на более низкую частоту.
Сформированный в ПРЧ 2 ансамбль принятых радиосигналов xn(t) синхронно преобразуется в устройстве 3 в ансамбль комплексных цифровых сигналов xn(z). Комплексные цифровые сигналы xn(z) синхронно регистрируются на заданном временном интервале в формирователе ДВКФ 4-1. Кроме того, в формирователе 4-1 из цифровых сигналов пар каналов одновременно формируются  комплексных ДВКФ
комплексных ДВКФ  Полученные комплексные ДВКФ
Полученные комплексные ДВКФ  поступают в устройство сдвига 4-2.
поступают в устройство сдвига 4-2.
В устройстве 4-2 комплексная ДВКФ каждой пары каналов сдвигается по времени на величину  соответствующую каждому ожидаемому направлению m=1, …, M прихода принятых прямого и отраженных от объектов радиосигналов.
соответствующую каждому ожидаемому направлению m=1, …, M прихода принятых прямого и отраженных от объектов радиосигналов.
Полученные  сдвинутых комплексных ДВКФ
сдвинутых комплексных ДВКФ  поступают в устройство компенсации когерентных помех 4-3.
поступают в устройство компенсации когерентных помех 4-3.
В устройстве 4-3 одновременно выделяются центральные части  всех сдвинутых функций
всех сдвинутых функций  Для каждого ожидаемого направления прихода m=1, …, M усредняются соответствующие центральные части
Для каждого ожидаемого направления прихода m=1, …, M усредняются соответствующие центральные части  Полученное для m-го направления среднее значение
Полученное для m-го направления среднее значение  преобразуется в комплексный цифровой сигнал m-го направления
преобразуется в комплексный цифровой сигнал m-го направления  который запоминают.
который запоминают.
Одновременно полученные M комплексных цифровых сигналов  поступают в устройство обнаружения и определения пространственных координат 4-4.
поступают в устройство обнаружения и определения пространственных координат 4-4.
В устройстве 4-4 идентифицируется сформированный для совпадающего с направлением m' на передатчик подсвета комплексный цифровой сигнал как прямой комплексный цифровой сигнал  .
.
Кроме того, в устройстве 4-4 одновременно формируются (M-1) зависящих от временного m и частотного F сдвигов результирующих комплексных ДВКФ между прямым цифровым сигналом передатчика  и цифровым сигналом m-го направления.
и цифровым сигналом m-го направления.
Исключается центральная часть каждой комплексной ДВКФ и получаются сигналы модифицированных комплексных ДВКФ  Из сигналов модифицированной комплексной ДВКФ
Из сигналов модифицированной комплексной ДВКФ  и прямого комплексного цифрового сигнала формируют модифицированные рассеянные комплексные цифровые сигналы
и прямого комплексного цифрового сигнала формируют модифицированные рассеянные комплексные цифровые сигналы 
Формируются (M-1) зависящих от временного τ и частотного F сдвигов результирующих сигналов комплексной ДВКФ  между модифицированными рассеянными комплексными цифровыми сигналами
между модифицированными рассеянными комплексными цифровыми сигналами  и прямым комплексным цифровым сигналом
и прямым комплексным цифровым сигналом 
Определяется по максимумам модуля  результирующего сигнала комплексной ДВКФ число сжатых рассеянных сигналов m-го направления и фиксируется значение задержки по времени τpm, абсолютного доплеровского сдвига Fpm и азимутально-угломестного направления прихода (αpm, βpm) каждого p-го сжатого рассеянного сигнала. По значениям задержки по времени τpm, абсолютного доплеровского сдвига Fpm и азимутально-угломестного направления прихода (αpm, βpm) каждого p-го сжатого рассеянного сигнала выполняется обнаружение и определение пространственных координат воздушных объектов.
результирующего сигнала комплексной ДВКФ число сжатых рассеянных сигналов m-го направления и фиксируется значение задержки по времени τpm, абсолютного доплеровского сдвига Fpm и азимутально-угломестного направления прихода (αpm, βpm) каждого p-го сжатого рассеянного сигнала. По значениям задержки по времени τpm, абсолютного доплеровского сдвига Fpm и азимутально-угломестного направления прихода (αpm, βpm) каждого p-го сжатого рассеянного сигнала выполняется обнаружение и определение пространственных координат воздушных объектов.
При этом выполняются следующие действия:
- сравниваются с порогом значения абсолютного доплеровского сдвига Fpm и угломестного направления прихода (βpm) р-го сжатого рассеянного сигнала и при превышении порога принимается решение об обнаружении подвижного объекта в направлении αpm.
Порог выбирается исходя из минимизации вероятности пропуска объекта;
- по значению абсолютной задержки сигнала τpm определяется кажущаяся дальность до объекта Dpm=τpmc, где c - скорость света;
- определяются пространственные координаты обнаруженного объекта по кажущейся дальности Dpm и значениям направления прихода αpm рассеянных сигналов.
При этом для пары «устройство обнаружения - передатчик» строится эллипсоид равных кажущихся дальностей, соответствующих геометрическому месту точек в пространстве, сумма расстояний до которых (от передатчика до объекта и от объекта до устройства обнаружения) равна найденному значению кажущейся дальности Dpm. По пересечению эллипсоида равных кажущихся дальностей и значению азимутально-угломестного направления прихода (αpm, βpm) рассеянных сигналов определяются географические координаты обнаруженного объекта.
В устройстве 5 отображаются результаты обнаружения и пространственной локализации объектов.
Таким образом, за счет снижения мешающего воздействия мощного прямого радиосигнала передатчика подсвета путем его сжатия и последующей двумерной режекции в частотно-временной области удается решить поставленную задачу с достижением технического результата.
ИСТОЧНИКИ ИНФОРМАЦИИ
1 RU, патент, 2316018, кл. G01S 5/04, 2008 г.
2 RU, патент, 2319976, кл. G01S 5/04, 2008 г.
3 Ширман Я.Д., Манжос В.Н. Теория и техника обработки радиолокационной информации на фоне помех. - М: Радио и связь, 1981.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПАССИВНОГО ОБНАРУЖЕНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2011 |
|
RU2472176C1 |
| СПОСОБ ПАССИВНОГО ОБНАРУЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2011 |
|
RU2471199C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2013 |
|
RU2522170C1 |
| СПОСОБ ПАССИВНОГО ОБНАРУЖЕНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2013 |
|
RU2542330C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПРОСТРАНСТВЕННОЙ ЛОКАЛИЗАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2010 |
|
RU2444755C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПРОСТРАНСТВЕННОЙ ЛОКАЛИЗАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2010 |
|
RU2444754C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ РАДИОМОЛЧАЩИХ ОБЪЕКТОВ | 2018 |
|
RU2716006C2 |
| СПОСОБ ДИСТАНЦИОННОГО МОНИТОРИНГА РАДИОМОЛЧАЩИХ ОБЪЕКТОВ | 2018 |
|
RU2723432C2 |
| СПОСОБ СКРЫТНОГО ОБНАРУЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2013 |
|
RU2521608C1 |
| СПОСОБ СКРЫТНОЙ РАДИОЛОКАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2014 |
|
RU2557250C1 |
Изобретение относится к радиотехнике и может быть использовано в системах контроля наземного и воздушного пространства с использованием прямых и рассеянных объектами радиосигналов, излучаемых множеством неконтролируемых и контролируемых передатчиков радиоэлектронных систем различного назначения. Достигаемым техническим результатом изобретения является повышение дальности обнаружения и точности пространственной локализации объектов. Повышение дальности обнаружения и точности пространственной локализации объектов достигается за счет введения новых операций обработки принимаемых радиосигналов, обеспечивающих снижение мешающего воздействия мощного прямого радиосигнала передатчика подсвета путем его сжатия и последующей двумерной режекции в частотно-временной области. 1 ил.
Способ пассивного обнаружения и пространственной локализации подвижных объектов, заключающийся в том, что когерентно принимают пространственно разнесенными приемными каналами многолучевые радиосигналы, включающие излучаемый передатчиком подсвета прямой радиосигнал с расширенным спектром и рассеянные объектами радиосигналы этого передатчика, синхронно преобразуют ансамбль принятых радиосигналов в комплексные цифровые сигналы, синхронно регистрируют комплексные цифровые сигналы, из цифровых сигналов пар каналов формируют комплексные двумерные взаимно корреляционные функции (ДВКФ), зависящие как от временного, так и от частотного сдвигов принятых сигналов, сдвигают по времени комплексную ДВКФ каждой пары каналов на величину, соответствующую каждому ожидаемому направлению m прихода принятых прямого и рассеянных от объектов радиосигналов, выделяют центральные двухмерные части сдвинутых ДВКФ, усредняют выделенные для m-го направления прихода центральные двухмерные части сдвинутых комплексных ДВКФ, отличающийся тем, что преобразуют усредненную ДВКФ в комплексный цифровой сигнал m-го направления, который запоминают, идентифицируют сформированный для совпадающего с направлением на передатчик подсвета комплексный цифровой сигнал как прямой комплексный цифровой сигнал, для каждого m-го направления формируют зависящую от временного и частотного сдвигов результирующую комплексную ДВКФ между прямым цифровым сигналом передатчика и цифровым сигналом m-го направления, исключают центральную часть комплексной ДВКФ и получают сигнал модифицированной комплексной ДВКФ, из сигнала модифицированной комплексной ДВКФ и прямого комплексного цифрового сигнала формируют модифицированный рассеянный комплексный цифровой сигнал, формируют зависящий от временного и частотного сдвигов результирующий сигнал комплексной ДВКФ между модифицированным рассеянным комплексным цифровым сигналом и прямым комплексным цифровым сигналом, определяют по максимумам модуля результирующего сигнала комплексной ДВКФ число сжатых рассеянных сигналов m-го направления и фиксируют значения задержки по времени, абсолютного доплеровского сдвига и азимутально-угломестное направление прихода каждого сжатого рассеянного сигнала, по которым выполняют обнаружение и определение пространственных координат воздушных объектов.
| СПОСОБ ПОИСКА ПЕРЕДАТЧИКОВ СЛОЖНЫХ СИГНАЛОВ | 2006 |
|
RU2319976C1 |
| СПОСОБ ОБНАРУЖЕНИЯ СЛОЖНЫХ СИГНАЛОВ | 2006 |
|
RU2316018C1 |
| RU 2010132015 A, 29.07.2010 | |||
| СЕЙСМИЧЕСКИЙ КОРРЕЛЯЦИОННЫЙ ПЕЛЕНГАТОР ОБЪЕКТОВ | 2001 |
|
RU2204849C2 |
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ И ЛАЗЕРНОЕ ЛОКАЦИОННОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2183841C1 |
| US 7012552 B2, 14.03.2006 | |||
| US 6389974 B1, 21.05.2002 | |||
| US 6806828 B1, 19.10.2004. | |||

