Изобретение относится к электронике и авионике и предназначено в основном для размещения на всех летательных аппаратах, в первую очередь истребителях, с целью скрытного определения воздушных целей, в частности - стелс-целей. Разумеется, такой радиолокатор может быть установлен и на земле, например на ракетной и артиллерийской зенитной установке.
Известны радиолокационные станции (далее РЛС), предназначенные для выявления стелс-целей, но они требуют большой базы размещения двух биполярных базовых РЛС, что не позволяет разместить их на самолете (см., например, заявку России №2006100610 от 27.07.2007).
Известно, что стелс-цели не отражают радиоволны в направлении их прихода и поэтому не видны на обычной РЛС. Но российские ученые установили, что рассеянное излучение стелс-цели не может быть меньше 50 % от попавшего на нее. То есть стелс-цель не видна со стороны излучения, но хорошо видна с других направлений. На этом и основано действие данного изобретения: самолетный радиолокатор, работая в пассивном режиме, принимает отраженные от стелс-цели сигналы других РЛС.
Сущность изобретения в том, что радиолокатор имеет два направленных приемника излучения, один из которых всегда направлен на любую известную РЛС (далее «базовую») и определяет ее курсовой азимут, а второй воспринимает отраженное от целей излучение этой же РЛС, определяя курсовой вертикальный и азимутальный углы цели.
Локатор имеет блок вычисления дальности до цели путем решения геометрической задачи построения треугольника по азимутальному углу «У» между направлением на базовую РЛС и на цель, которая представляет собой специализированный компьютер с монитором. Однако для аналитического решения данной задачи одного известного утла недостаточно. Необходимо еще две известных величины, из которых одна должна быть линейная. Определение дальности до цели возможно тремя способами.
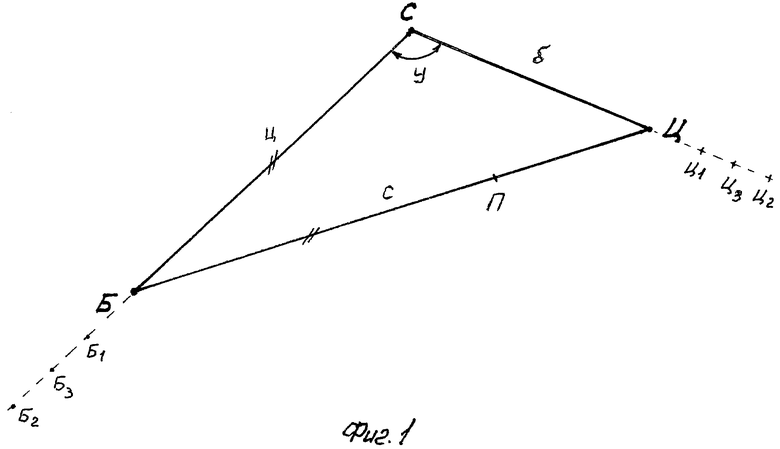
Первый способ: локатор имеет координатор его местоположения и, сравнив свои координаты с координатами базовой РЛС, определяет дальность до нее. Таким образом, в треугольнике БСЦ (см. прилагаемый эскиз, где Б - базовая РЛС, С - самолет, Ц - цель) мы теперь знаем еще и сторону БС, а также равный ей отрезок БП.
Координатор может быть 3 типов: спутниковый по системе ГЛАНАС, телеметрический - т.е. получающий готовую информацию о своих координатах от любого источника, например от уже упомянутой базовой РЛС, и инерциальный - т.е рассчитывающий свои мгновенные координаты исходя от известной точки взлета в соответствии с направлением и скоростью своего движения.
В первых двух типах сигнал на координатор поступает с антенны, во втором типе - с компаса и спидометра. Координаторы (в быту их называют навигаторами) известны из существующего уровня техники и в данной заявке не рассматриваются. Координатор соединен с блоком вычисления дальности до цели.
Локатор имеет также блок замера времени между прохождениями сигналов с базовой РЛС и отраженного от цели. Этот блок получает сигналы от двух приемников - приемника сигнала базовой РЛС и приемника сигнала, отраженного от цели. Конструкция этого блока может быть аналогична имеющимся в существующих РЛС блокам замера времени прохождения сигнала до цели и обратно. Умножив это время на скорость света, мы получим сумму расстояний СЦ+ЦП. Иными словами, в треугольнике кроме угла еще известен периметр. Такой треугольник имеет единственное математическое решение, или при наличии на борту быстродействующего компьютера может быть получено методом последовательных приближений (подбора).
Однако если базовая РЛС работает в режиме непрерывною излучения, то она (если она - своя) должна периодически делать паузы в излучении (отрицательные импульсы), например на 0.002 с каждую секунду.
Второй способ: он почти аналогичен первому, с той разницей, что локатор вместо координатора имеет блок определения дальности до базовой РЛС по степени затухания ее сигнала при известной мощности излучения (или определение дальности до РЛС каким-либо другим известным способом). Это может быть приемник радиоволн, имеющий настройку, синхронизированную с настройкой приемника базовой РЛС, и имеющий индикатор уровня принимаемого сигнала. Этот вариант проще конструктивно, но его показания зависят от условий прохождения радиоволн в атмосфере (которые, разумеется, учитываются) и он может давать ошибку до 10%. Указанный блок соединен с блоком вычисления дальности до цели.
Третий способ: он более математически сложный, но и более перспективный. Приблизительно определить дальность цели можно только по углу «У» и сумме отрезков СЦ+ЦП. Приближенное аналитическое решение очень громоздкое, но треугольник легко решается компьютером методом последовательных приближений - рассматриваются варианты, когда базовая РЛС находится в точке Б1, Б2, Б3, которые принимаются от практически нуля (например, один километр) до максимальной дальности базовой РЛС данного типа (допустим, триста километров). Причем если угол «У» тупой, то есть если цель расположена дальше от базовой РЛС, чем самолет, то максимальная дальность может быть уменьшена на величину, равную половине суммы СЦ+ЦП.
В итоге получится интервал возможных дальностей до цели Ц1, Ц2, Ц3, который на экране локатора можно высветить как отрезок линии, если дальний конец отрезка находится в зоне досягаемости имеющейся ракеты, можно уверенно осуществлять пуск.
Очень полезно иметь блок поочередного приема двух или более базовых РЛС, который может быть выполнен по схеме мультивибратора или по схеме «бегущие огни» и который подает сигналы на нижеупомянутые приемники. Подавая разные напряжения на варикапы настройки приемников базового и отраженного сигнала, блок поочередного приема меняет их рабочую частоту. При этом управляющее напряжение варикапов задается летчиком при настройке на частоты используемых базовых РЛС. В итоге приемник сигнала базовой РЛС будет какое-то время, например 1 с, принимать одну станцию, а затем какое-то время другую станцию, работающую на другой частоте. Возможен прием трех, четырех и более станций.
В этом случае на экране высветится два совпадающих отрезка, совмещение которых даст меньший отрезок дальностей до цели. Для удобства можно заложить в компьютер программу, по которой он в этом случае не будет высвечивать концы этих отрезков (это логическая программа «И»), а будет высвечивать только меньший отрезок совпадения. Причем три-четыре или несколько базовых РЛС сократят этот отрезок еще более.
Поочередный прием двух или более базовых РЛС очень полезен в других отношениях: если стелс-цель окажется на одной линии с базовой РЛС, то она перестанет быть видимой, а наличие данных, полученных с помощью хотя бы двух базовых РЛС, позволит определить ее наличие и примерную дальность до нее. Кроме того, если одна из базовых РЛС будет отключена (уничтожена), то цель не будет потеряна.
Третий способ особенно хорош тем, что позволяет настроиться и использовать любую РЛС, в том числе вражескую, в том числе подвижную, то есть установленную на вражеском самолете. И при этом сам самолет-носитель ничем не обнаруживает себя.
Таким образом, локатор «видит» все цели, в том числе и стелс-цели. Для выделения из них именно стелс-целей локатор должен иметь блок обмена информацией с наземной или воздушной активной РЛС, представляющий собой приемопередающее телеметрическое устройство (аналог беспроводного Интернета). Сигнал с него поступает на блок вычисления дальности до цели и/или на монитор. Самолет может и сам включить свою РЛС в активный режим, но при этом он обнаружит себя, и система оповещения об облучении предупредит экипаж стелс-цели о наличии и направлении нападения.
Получив с другой РЛС, работающей в активном режиме, данные о местоположении целей и сравнив их со своими данными, самолет сможет различить стелс-цели, так как их не будет в информации, полученной с активной РЛС. Допустим, информация с активной РЛС обозначается на экране локатора горизонтальными черточками, а информация, полученная с данного радиолокатора, - вертикальными черточками. Тогда обычные цели будут видны на экране локатора как крестики (горизонтальная и вертикальная чёрточки), а стелс-цели - как вертикальные черточки.
Перед пуском ракет следует настроить головку самонаведения ракеты (она должна быть перенастраиваемой) на частоту используемой базовой РЛС+ - доплеровское смещение, и убедившись, что головка захватила цель, можно осуществлять пуск ракеты. Возможен другой вариант атаки: ракета, снабжённая координатором или автопилотом и настроенная на частоту радиолокатора самолета, запускается с упреждением в район цели. Самолет-носитель во время полета ракеты выполняет резкий маневр вбок, чтобы ракета не оказалась на линии самолет-цель, иначе она ее не увидит. А к моменту подлета ракеты ближе к цели самолет вновь поворачивает так, чтобы подсветить стелс-цель своим радиолокатором, работающем в активном режиме.
Элементы фазированной антенны могут быть размещены в радиопрозрачных передних и задних кромках крыльев.
На фиг.1 изображен треугольник БСЦ, где Б - какая-либо активная РЛС, например базовая, С - самолет-носитель, ПЦ - стелс-цель, У - угол между направлением на цель и на базовую РЛС.
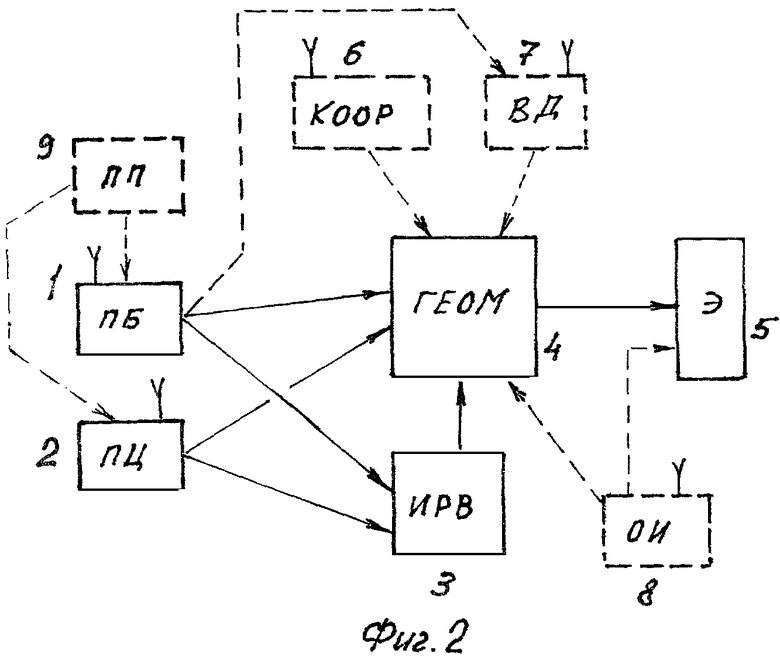
На фиг.2 изображена блок-схема радиолокатора, где ПБ - приемник активной (базовой) РЛС, ПЦ - приемник сигнала, отраженного от целей, ИРВ - блок измерения разницы времени прохождения этих сигналов, ГЕОМ - блок решения геометрической задачи, Э - экран. Радиолокатор может также содержать (а может и не содержать) координатор - КООР, или вычислитель дальности до базовой РЛС - ВД, блок обмена информацией - ОИ, и блок поочередного приема - ПП. Обязательные блоки показаны сплошной линией, необязательные дополнительные - пунктирной линией. Связи между блоками показаны стрелкой. Блоки, имеющие общую или индивидуальную антенну, имеют стандартное радиотехническое обозначение антенны.
Работает радиолокатор так: летчик определяет нужную, одну или несколько, активную РЛС (лучше, если это будет самолет дальнего радиолокационного обнаружения) и настраивает приемники ПБ и ПЦ на ее частоту. Два направленных приемника ПБ и ПЦ определяют угол между азимутами активной РЛС и цели. Блок ИРВ определяет сумму отрезков СЦ и ЦП. Блок ГЕОМ решает геометрическую задачу построения треугольника БСЦ и выдает данные о цели на экран 3. Для облегчения решения этой задачи радиолокатор может иметь блоки КООР или ВД.
Как указывалось выше, возможны 3 способа определения точного или приблизительного местонахождения цели. Первый и второй способы аналогичны, например, описанным в книге Степанова Ю.Г. «Противорадиолокационная маскировка», Москва, 1968, с.24, 25, или «Радиолокационные устройства» Григорин-Рябова В.В., Москва, 1970, с.35.
При известной дальности от самолета до базовой РЛС (см. фиг.1, сторона БС) по азимутальному углу У путем задания еще какого-либо элемента, например искомой дальности до цели СЦ, т.е. по двум сторонам и углу между ними, строится по правилам геометрии искомый треугольник БСЦ и определяется его периметр (см. М.Я.Выгодский. «Справочник по элементарной математике», Москва, 1969, с.365, 366).
Затем в компьютере ГЕОМ сравнивается полученный периметр с известным. В способах 1 и 2 периметр известен и равен БС+БП+СЦ+ЦП или 2БС+(ЦС+ЦП). Сумма (ЦС+ЦП) известна по показаниям блока ИРВ как разница во времени, умноженная на скорость света.
Если полученный в результате вычислений периметр отличается от известного, например если он больше него, компьютер соответственно заранее заданной программе уменьшает значение СЦ на шаг и производит вычисление следующего варианта треугольника. И так до тех пор, пока не будет достигнута нужная точность (в километрах или в процентах) при использовании метода последовательных приближений, или до тех пор, пока не будут с определенным шагом испробованы все значения данности СЦ от нуля до суммы СЦ+ЦП (СЦ не может быть больше суммы СЦ+ЦП).
В тех случаях когда местонахождение или хотя бы мощность РЛС, используемой в качестве базовой, неизвестны, следует воспользоваться третьим способом. Задается с определенным шагом (например, 1 км) в определенных пределах (максимальный радиус действия РЛС при данной частоте) значение БС, затем производятся вышеприведенные вычисления по способу 1 и 2 и находится положение цели Ц1. Затем задается следующее значение БС и находится положение цели Ц2. По окончании вычислений на экране монитора высветится отрезок возможных положений цели.
Если угол У будет острый, то точка П будет находиться на стороне БС, и тогда СЦ не может быть больше суммы СЦ+ЦП.
Для выделения стелс-целей из всех других может иметься блок обмена информацией ОИ. Через этот же блок самолет дальнего радиолокационного обнаружения может передавать свои мгновенные координаты.
При настройке на две или несколько базовых РЛС блок ГШ поочередно перенастраивает приемники ПБ и ПЦ.
Противостелсовый самолетный радиолокатор относится к авионике и предназначен для всех летательных аппаратов. Сущность изобретения в том, что радиолокатор самолета, работая в пассивном режиме, определяет азимуты на активную радиолокационную станцию (РЛС) и на цель. Имеется блок решения геометрической задачи, который определяет примерную или точную дальность до цели. Достигаемый технический результат - скрытное определение воздушных целей, в том числе стелс-целей. 9 з.п. ф-лы, 2 ил.
1. Радиолокатор, содержащий направленный приемник отраженного радиоизлучения и фазированную антенну, отличающийся тем, что имеет направленный приемник сигнала любого радиопередатчика, причем оба приемника расположены на самолете, а также имеет блок замера времени между приходами сигнала с любого радиопередатчика и его же сигнала, отраженного от цели, на который поступают сигналы времени с упомянутых приемников, и имеет блок вычисления дальности до цели путем вычисления азимутального угла между любым радиопередатчиком и целью и последующего решения геометрической задачи, на который поступают сигналы азимутов с упомянутых приемников и сигнал времени с блока замера времени.
2. Радиолокатор по п.1, отличающийся тем, что блок вычисления дальности до цели путем решения геометрической задачи представляет собой специализированный компьютер с монитором.
3. Радиолокатор по п.1, отличающийся тем, что содержит координатор местоположения самолета или блок вычисления дальности до любого радиопередатчика известной мощности по степени затухания его сигнала, имеющие общую с другими устройствами или индивидуальную антенну, сигнал с которых поступает в блок вычисления дальности до цели.
4. Радиолокатор по п.3, отличающийся тем, что координатор работает совместно со спутниковой навигационной системой.
5. Радиолокатор по п.3, отличающийся тем, что координатор получает телеметрическую информацию о своем местонахождении от постороннего источника.
6. Радиолокатор по п.3, отличающийся тем, что координатор инерциальный и использует информацию о начальной точке движения и о скорости и направлении движения в каждый момент времени.
7. Радиолокатор по п.3, отличающийся тем, что блок вычисления дальности до любого радиопередатчика известной мощности по степени затухания его сигнала представляет собой радиоприемник, имеющий настройку, синхронизированную с настройкой приемника сигнала любого радиопередатчика по п.1, и имеющий индикатор уровня принимаемого сигнала.
8. Радиолокатор по п.1, отличающийся тем, что имеет блок обмена информацией с диспетчером полетов и/или с другими самолетами, представляющий собой приемопередающее телеметрическое устройство, сигнал с которого поступает на блок вычисления дальности до цели и/или на монитор.
9. Радиолокатор по п.1, отличающийся тем, что имеет блок поочередного приема сигналов двух или более любых радиопередатчиков, представляющий собой мультивибратор или схему «бегущие огни», сигнал с которого поступает на два приемника по п.1.
10. Радиолокатор по п.1, отличающийся тем, что элементы фазированной антенны размещены в радиопрозрачных передних и задних кромках крыльев.
| RU 2006100610 А, 27.07.2007 | |||
| СТАНЦИЯ РАДИОЭЛЕКТРОННОЙ РАЗВЕДКИ И ПОДАВЛЕНИЯ | 1998 |
|
RU2150178C1 |
| Включающее и выключающее приспособление для заводки часов | 1928 |
|
SU25098A1 |
| Устройство для частотного манипулирования | 1945 |
|
SU73108A1 |
| СПОСОБ ЛОКАЦИИ ЦЕЛИ (ВАРИАНТЫ) | 2003 |
|
RU2254592C1 |
| СПОСОБ РАДИОЛОКАЦИИ С ФАР | 2005 |
|
RU2349928C2 |
| US 6542109 B2, 01.04.2003 | |||
| US 5990822 А, 23.11.1999. | |||

