Область изобретения
Настоящее изобретение относится к технике обнаружения цели и определения направления на нее. В частности, настоящее изобретение относится к вариантам способа локации цели с помощью сверхширокополосных импульсов, а также к программным продуктам для реализации этих способов.
Существующий уровень техники
В последнее время обозначился повышенный интерес к вопросам создания радиолокационных систем, использующих сверхширокополосные сигналы, т.е. сигналы, полоса которых сопоставима с центральной частотой спектра. Актуальным также является создание подобных систем для зондирования земных недр, морских глубин и атмосферы (Вопросы перспективной радиолокации. - М.: Радиотехника, 2003 (Серия Радиолокация). - С.22-25). Объясняется это физической природой сверхширокополосных сигналов, порождающей ряд полезных свойств. Например, при отражении сверхширокополосные сигналы становятся носителями достаточно большого объема информации о самих зондируемых объектах (Борзов А.Б. Анализ вкладов отдельных элементов объекта сложной формы в общем поле рассеяния электромагнитных волн на объектах сложной формы. - Электромагнитные волны и электронные системы, 1998, №10, с.38-54). Сверхширокополосные сигналы практически нельзя подавить при прохождении сквозь среду с изменяющимися свойствами проницаемости. В радиолокации их применение открывает возможности дистанционного распознавания целей и преодоления антирадарной технологии "Стелс".
Однако одновременно с преимуществами природа сверхширокополосных сигналов порождает и трудности, препятствующие использованию известных технических решений для реализации сверхширокополосных радиолокационных систем. Одну из ключевых проблем составляет задача организации оптимального или субоптимального приема при непредсказуемых искажениях сигнала. Действительно, в реальных условиях отражательные характеристики объектов, а зачастую и свойства среды распространения, не могут быть определены с такой степенью точности, чтобы хотя бы приблизительно предсказывать те искажения, которые возникнут в отраженных сверхширокополосных сигналах, наблюдаемых на приеме. Традиционная же радиолокационная техника предполагает полную априорную информацию о форме отраженных сигналов и, соответственно, организацию приема с помощью согласованных фильтров. Ясно, что эффективный прием сверхширокополосных сигналов возможен только при переходе от традиционных методов к адаптивной обработке.
Известен способ локации с помощью сверхширокополосных импульсов, излучаемых и принимаемых антенной решеткой, в которой осуществляется разделение всей полосы сверхширокополосных импульсов на отдельные частотные поддиапазоны для удобства формирования угловых отклонений луча с помощью фазосдвигателей (заявка ЕПВ №0618641, публ.05.10.1994). Недостатком данного способа является отсутствие учета возможного искажения формы отраженных сигналов.
Наиболее близким аналогом настоящего изобретения является способ локации цели, заключающийся в том, что: излучают сверхширокополосные импульсы решеткой антенных элементов; при приеме отраженных импульсов в заранее заданном угловом секторе контроля задерживают сигнал, принятый каждым антенным элементом упомянутой решетки антенных элементов, с помощью последовательно соединенных элементов задержки в каждом из множества используемых каналов наблюдения; осуществляют процедуру обнаружения цели путем использовании многоканальной корреляционной обработки сигналов на выходах упомянутых элементов задержки в разных упомянутых каналах наблюдения (патент США №6515622, публ. 04.02.2003). Недостатком данного способа является отсутствие указания того, как следует формировать опорные сигналы и как нужно принимать сигналы, приходящие с направлений, отличающихся от выбранных опорных направлений.
Сущность изобретения
Цель настоящего изобретения состоит в разработке такого способа локации цели, который был бы свободен от указанных недостатков.
Для решения этой задачи и достижения указанного технического результата в способе локации цели, заключающемся в том, что: излучают сверхширокополосные импульсы решеткой антенных элементов; при приеме отраженных импульсов в заранее заданном угловом секторе контроля задерживают сигнал, принятый каждым антенным элементом решетки антенных элементов, с помощью последовательно соединенных элементов задержки в каждом из множества используемых каналов наблюдения; осуществляют процедуру обнаружения цели путем использования многоканальной корреляционной обработки сигналов на выходах элементов задержки в разных каналах наблюдения, - в первом варианте способа, когда известно направление прихода отраженных импульсов, в соответствии с настоящим изобретением при многоканальной корреляционной обработке сигналов: выполняют оценку формы принимаемого импульса на множестве дискретных временных позиций путем усреднения по каналам наблюдения сигналов на подмножествах выходов тех из элементов задержки, которые в разных каналах наблюдения соответствуют одной и той же дискретной временной позиции при известном направлении прихода отраженных импульсов в заранее заданном угловом секторе контроля; далее используют найденную оценку формы принимаемого импульса в качестве опорного сигнала в многоканальной корреляционной обработке.
Во втором варианте способа, когда направление прихода отраженных импульсов неизвестно, в соответствии с настоящим изобретением при многоканальной корреляционной обработке сигналов: формируют отдельные оценки величины принимаемого импульса на множестве дискретных временных позиций для каждого опорного направления из заранее выбранного конечного множества опорных направлений в угловом секторе контроля, причем оценку величины принимаемого импульса в дискретные моменты для каждого из опорных направлений формируют путем усреднения по каналам наблюдения сигналов на подмножествах отсчетов, которые для заданного опорного направления соответствуют одной и той же дискретной временной позиции; находят оценку формы принимаемого импульса по сформированным оценкам величины принимаемого импульса в различные дискретные моменты времени; используют найденную оценку формы принимаемого импульса в качестве опорного сигнала в многоканальной корреляционной обработке; на множестве результатов многоканальной корреляционной обработки выбирают корреляционный максимум, который используют в качестве предпороговой решающей статистики в процедуре обнаружения цели; оценивают направление прихода отраженных импульсов в заранее заданном угловом секторе контроля с помощью интерполяционной оценки положения корреляционного максимума в окрестности того опорного направления из выбранного множества опорных направлений, для которого получен наибольший результат многоканальной корреляционной обработки.
При этом формирование множества отсчетов в каждом из каналов наблюдения можно осуществлять с помощью линейной интерполяции за счет того, что находят веса линейных комбинаций сигналов на выходах элементов задержки в разных каналах наблюдения и используют эти найденные веса линейных комбинаций сигналов для формирования условных оценок формы принимаемых импульсов на заданном множестве дискретных временных позиций, согласующихся с одним из выбранного множества опорных направлений.
Эта же задача с достижением того же технического результата решается посредством программных продуктов, каждый из которых при исполнении на компьютере обеспечивает реализацию упомянутой многоканальной корреляционной обработки сигналов в одном из вышеуказанных способов.
В существующем уровне техники не выявлено источников информации, которые содержали бы сведения об объектах того же назначения с указанной совокупностью отличительных признаков, что позволяет считать способ по настоящему изобретению новым и имеющим изобретательский уровень.
Краткое описание чертежей
Настоящее изобретение поясняется чертежами, на которых одинаковые элементы на всех чертежах обозначены одинаковыми ссылочными позициями, и где:
Фиг.1 представляет блок-схему общепринятого устройства для формирования зондирующих сверхширокополосных импульсов и приема отраженных сигналов;
Фиг.2 иллюстрирует форму зондирующего импульса, формируемого устройством по фиг.1;
Фиг.3 иллюстрирует различные виды отражений зондирующего импульса по фиг.2 от реального объекта;
Фиг.4 представляет блок-схему устройства для субоптимального обнаружения отраженных сверхширокополосных сигналов, приходящих с известных направлений, для реализации способа по первому варианту настоящего изобретения;
Фиг.5 иллюстрирует случай приема отраженного сверхширокополосного сигнала от объекта, направление на который заранее неизвестно;
Фиг.6 поясняет осуществление второго варианта способа по настоящему изобретению;
Фиг.7 представляет блок-схему устройства для реализации способа по второму варианту настоящего изобретения.
Фиг.8а представляет блок-схему устройства по фиг.7 в случае применения интерполяции общего вида для восстановления отсчетов принимаемого импульса в промежуточных позициях.
Фиг.8б представляет блок-схему устройства по фиг.7 в случае применения линейной интерполяции для восстановления отсчетов принимаемого импульса в промежуточных позициях.
Подробное описание предпочтительных вариантов выполнения
Обычно сверхширокополосная локационная система реализуется с помощью многоэлементной антенной решетки, блок-схема которой изображена на фиг.1. Эта многоэлементная антенная решетка, в данном случае, выбрана линейной (одномерной) для простоты пояснений. Она содержит каналы 1 наблюдения с первого (1.1) по М-й (1.М). Каждый канал 1 наблюдения содержит соединенные последовательно антенный элемент 2, блок 3 управляемой задержки, переключатель 4 режима работы (переключатель прием-передача), фильтр 5 нижних частот и линию 6 задержки, которая состоит из L одинаковых элементов 7 задержки, каждый с временем Т задержки, и имеет L+1 отводов. Блоки 3 управляемой задержки используются для установки главного направления зондирования как при передаче, так и при приеме. Фильтры 5 нижних частот предназначены для селекции отраженных сигналов в частотном диапазоне. Линии 6 задержки используются, чтобы выполнить оптимальную обработку наблюдений для обнаружения и оценки направления прихода отраженного импульса.
В данном изобретении не рассматриваются вопросы формирования и излучения мощных сверхширокополосных импульсов (рассмотренные, например, в работе Ширман Я.Д. и др. Методы радиолокационного распознавания и их моделирование // Зарубежная радиоэлектроника. Успехи современной радиоэлектроники. 1996, №11, стр.3). Реально форма зондирующих импульсов оказывается близкой либо к колокольной, как показано на фиг.2, либо типа косинуса на пьедестале. Отмеченные "тонкие" различия формы излучаемых сверхширокополосных импульсов могут лишь в некоторой степени отразиться на результатах распознавания удаленных целей, но никак не на результатах измерения радиолокационных параметров (дальности до цели и направления на цель). Действительно, при отражении и при прохождении сквозь среду сверхширокополосные импульсы искажаются столь радикально, что отмеченные выше различия в исходной форме вполне можно считать несущественными. Единственно доступное ограничение, на которое можно ориентироваться при описании отраженных импульсов в условиях работы с нерелятивистскими объектами, состоит в том, что их спектр находится в пределах исходного частотного диапазона зондирования (0-1 ГГц), что соответствует длительности импульса, представленного на фиг.2, равной Δtи≈1 нс.
Из-за относительно малой длительности протяженность зондирующих импульсов в пространстве обычно оказывается значительно меньше размеров реальных объектов. Как следствие, при отражении возникает целая группа импульсов с псевдослучайным распределением задержек, амплитуд и с различной формой. На фиг.3 схематично представлен процесс отражения одного зондирующего импульса от объекта с неоднородной поверхностью. Чтобы обеспечить эффективное суммирование энергии отраженных сигналов в адаптивной приемной системе, построенной на базе схемы по фиг.1, длительность линий задержек (L×7) следует выбирать несколько больше (примерно в 2-2,5 раза) максимально допустимого "растяжения" отраженных импульсов во времени.
На фиг.1 осуществляют следующие операции:
излучают сверхширокополосные импульсы антенными элементами 2 (переключатель 4 режима работы в положении «передача», т.е. вниз на фиг.1);
при приеме отраженных импульсов (переключатель 4 режима работы в положении «прием», т.е. вверх на фиг.1) задерживают сигнал, принятый каждым антенным элементом 2, с помощью последовательно соединенных элементов 7 задержки, образующих линию 6 задержки в каждом канале 1 наблюдения;
осуществляют процедуру обнаружения цели путем использовании многоканальной корреляционной обработки сигналов на выходах элементов 7 задержки в разных линиях 6 задержки.
Эти операции выполняются как в способе по настоящему изобретению, так и в наиболее близком аналоге.
Рассмотрим теперь те операции, которые отличают первый вариант способа по настоящему изобретению, т.е. случай обнаружения цели при точно известном направлении прихода отраженных импульсов.
Обозначим выборку отсчетов, принятую многоканальной системой, через  . В силу того, что направление на объект установлено точно, каждая отдельная последовательность
. В силу того, что направление на объект установлено точно, каждая отдельная последовательность  при наличии отраженного импульса содержит аддитивную смесь одного и того же сигнала и шума. При отсутствии отраженного импульса последовательности
при наличии отраженного импульса содержит аддитивную смесь одного и того же сигнала и шума. При отсутствии отраженного импульса последовательности  содержат независимые шумовые выборки. В математической форме это может быть записано так
содержат независимые шумовые выборки. В математической форме это может быть записано так  при справедливости гипотезы Н0 (сигнал отсутствует),
при справедливости гипотезы Н0 (сигнал отсутствует),
 при справедливости гипотезы Н1, (сигнал присутствует),
при справедливости гипотезы Н1, (сигнал присутствует),
где S(t) - отраженный сверхширокополосный сигнал неизвестной формы, t0 - момент времени, в который сформирована выборка наблюдений,  - выборка шумовых компонент, распределенных по нормальному закону с нулевым средним и дисперсией σ2, наблюдаемых на выходах линий 6 задержки.
- выборка шумовых компонент, распределенных по нормальному закону с нулевым средним и дисперсией σ2, наблюдаемых на выходах линий 6 задержки.
Остановимся подробнее на статистических характеристиках шума, поскольку именно они является определяющими при решении задачи в условиях априорной неопределенности. Во-первых, в силу автономной работы каналов 1 наблюдения приемной системы шумовые составляющие, присутствующие в них, будут статистически независимыми. Во-вторых, при технически оптимальной организации линий 6 задержки с отводами через интервалы, определяемые теоремой Котельникова, шумовые компоненты отсчетов, присутствующих в одном канале 1 наблюдения на различных отводах, также будут статистически независимыми.
В результате при наличии отраженного сигнала условная плотность вероятности наблюдения выборки  , присутствующей на срезе отводов с одинаковыми индексами задержек i (одинаковые задержки в каналах 1 на i Т), будет следующей:
, присутствующей на срезе отводов с одинаковыми индексами задержек i (одинаковые задержки в каналах 1 на i Т), будет следующей:

Из-за того, что относительно сигнальных компонент  нет никакой априорной информации, их оценку при каждом индексе задержки i можно сформировать только на основе критерия максимального правдоподобия
нет никакой априорной информации, их оценку при каждом индексе задержки i можно сформировать только на основе критерия максимального правдоподобия

Решение (2) можно найти дифференцированием.

В процессе работы системы зондирования со сверхширокополосными сигналами по фиг.1 происходит периодическое формирование и обработка выборок
 .
.
Интервал повторения формирования выборок не должен превосходить  где m - некоторое целое положительное число, чтобы гарантировать при обработке полное использование энергии отраженных импульсов, имеющих длительность не более
где m - некоторое целое положительное число, чтобы гарантировать при обработке полное использование энергии отраженных импульсов, имеющих длительность не более  Например, если взять максимальную задержку в линиях (LT) с двойным запасом относительно допустимых длительностей отраженных импульсов, то верхней границей необходимого периода повторения будет
Например, если взять максимальную задержку в линиях (LT) с двойным запасом относительно допустимых длительностей отраженных импульсов, то верхней границей необходимого периода повторения будет  что совпадает с верхней границей длительности принимаемых сверхширокополосных импульсов.
что совпадает с верхней границей длительности принимаемых сверхширокополосных импульсов.
Соотношение (3) определяет оценку максимального правдоподобия принимаемого сигнала для каждой периодически формируемой выборки  .
.
В предположении того, что отраженный сигнал имеет форму, точно совпадающую с (3), можно организовать субоптимальную процедуру обнаружения. Действительно, если форма S{t) принимаемого сигнала известна, то оптимальный в смысле критерия Неймана-Пирсона обнаружитель должен иметь вид:

где
- логарифм отношения правдоподобия, вычисленный с точностью до множителей, не зависящих от наблюдений, П - порог, устанавливаемый по уровню шумов и обеспечивающий заданную вероятность ложного обнаружения.
Подставляя в (5) оценку максимального правдоподобия (3), получаем искомое правило обнаружения:
При превышении порога П должно выноситься решение о наличии сигнала. Этому правилу обнаружения отраженных сверхширокополосных сигналов, приходящих с известного направления, соответствует система, блок-схема антенной решетки которой приведена на фиг.4. По сравнению со схемой по фиг.1 в данной системе добавлены сумматоры 8 для суммирования сигналов с одноименных отводов линий 7 задержки в разных каналах 1 наблюдения, блоки 9 возведения в квадрат для получения второй степени сигналов, просуммированных на каждом сумматоре 8, общий сумматор 10 для суммирования полученных в блоках 9 значений и решающий блок 11 для сравнения итоговой суммы с общего сумматора 10 с порогом П и принятия соответствующего решения о наличии или отсутствии отраженного сигнала с данного направления.
В этом случае, как легко убедиться, выполняют оценку формы принимаемого импульса на множестве дискретных временных позиций путем усреднения по каналам 1 наблюдения сигналов на подмножествах выходов тех элементов 7 задержки, которые в разных каналах 1 наблюдения соответствуют одной и той же дискретной временной позиции при известном направлении прихода отраженных импульсов; и используют найденную оценку формы принимаемого импульса в качестве опорного сигнала в упомянутой многоканальной корреляционной обработке.
Правило обнаружения (6) и вытекающая из него структура обнаружителя на фиг.4 получены в предположении совпадения формы полезных составляющих в каналах 1 наблюдения. Это возможно только при установке задержек  в точном соответствии с направлением прихода отраженных импульсов (т.е. с направлением на контролируемый объект). Однако на практике такая ситуация встречается достаточно редко. Наиболее характерными являются ситуации со случайным расположением контролируемых объектов в пределах некоторого углового сектора. При этом возникает задача обнаружения отраженных сигналов с одновременной оценкой направления их прихода. Далее ограничимся рассмотрением случаев при расположении зондируемых объектов на плоскости. Пространственная задача принципиально не отличается от задачи на плоскости, только требует более сложной модели для описания преобразований сигналов в антенной решетке. Кроме того, для упрощения выводов будем ориентироваться на линейную эквидистантную антенную решетку с разнесением чувствительных элементов на расстояние d.
в точном соответствии с направлением прихода отраженных импульсов (т.е. с направлением на контролируемый объект). Однако на практике такая ситуация встречается достаточно редко. Наиболее характерными являются ситуации со случайным расположением контролируемых объектов в пределах некоторого углового сектора. При этом возникает задача обнаружения отраженных сигналов с одновременной оценкой направления их прихода. Далее ограничимся рассмотрением случаев при расположении зондируемых объектов на плоскости. Пространственная задача принципиально не отличается от задачи на плоскости, только требует более сложной модели для описания преобразований сигналов в антенной решетке. Кроме того, для упрощения выводов будем ориентироваться на линейную эквидистантную антенную решетку с разнесением чувствительных элементов на расстояние d.
На фиг.5 показана ситуация приема отраженного сверхширокополосного сигнала от объекта, находящегося в некотором неизвестном направлении, характеризуемом углом α, отсчитанным от направления излучения зондирующего импульса. На фиг.5 каждый канал 1 наблюдения соединен с устройством 12 обнаружения и оценки направления прихода отраженных импульсов, структура которого будет получена в результате нижеследующего анализа.
Поскольку технически реализовать прием с континуума направлений нельзя, единственно возможным остается использование конечного набора контролируемых направлений с  , где k0 - угол, задающий направление излучения зондирующих импульсов, отсчитываемый от нормали к антенной решетке. В случае линейной эквидистантной антенной решетки с разнесением элементов 2 на расстояние d каждому из таких направлений соответствует собственное множество
, где k0 - угол, задающий направление излучения зондирующих импульсов, отсчитываемый от нормали к антенной решетке. В случае линейной эквидистантной антенной решетки с разнесением элементов 2 на расстояние d каждому из таких направлений соответствует собственное множество  компенсирующих задержек в каналах 1 наблюдений. То есть, к задержкам, согласованным с выбранным направлением зондирования α0, требуются дополнительные поправки
компенсирующих задержек в каналах 1 наблюдений. То есть, к задержкам, согласованным с выбранным направлением зондирования α0, требуются дополнительные поправки

Дополнительные задержки (7) могут быть реализованы либо с помощью специальных блоков, либо на основе соответствующих линейных преобразований отсчетов в каналах 1 наблюдения. Второй из указанных методов не требует использования индивидуального набора линий задержек для каждого контролируемого направления. Но первый метод позволяет в более простой и наглядной форме выполнить синтез искомого совместного алгоритма. Поэтому далее будем ориентироваться именно на первый метод. Конечные же результаты будут одинаковыми в обоих случаях.
Согласно общим выводам статистической теории обнаружения, которые справедливы и для рассматриваемой задачи, в условиях параметрической априорной неопределенности асимптотически оптимальным является метод корреляционного приема с использованием опорной копии, в которой неизвестные параметры сигнала заменены оценками максимального правдоподобия. В нашем случае неизвестным является параметр α, задающий направление прихода. Для него, на основе соответствующей обработки наблюдений, полученных для множества контрольных направлений,  нужно сформировать оценку максимального правдоподобия (ОМП). Поскольку в общем случае истинное направление не будет совпадать ни с одним из контрольных, для расчета потребуются интерполяционные методы. В классической теории оценивания параметров сигналов такая задача хорошо изучена. Общепризнанным является то, что приближенная оценка максимального правдоподобия может быть получена на основе разложения в ряд Тейлора по оцениваемому параметру отношения правдоподобия с точностью до членов второго (или более высокого) порядка. В рассматриваемой задаче воспользоваться указанным приближением возможно, если угловое разнесение контрольных направлений Δα не будет приводить к относительным задержкам на крайних элементах 7 задержки, большим длительности Δtи излучаемого импульса (см. фиг.2). Пояснить сформулированное требование поможет фиг.6, на которой показаны задержанные в каналах 1 наблюдения элементарные отраженные импульсы в случае двух соседних контрольных направлений.
нужно сформировать оценку максимального правдоподобия (ОМП). Поскольку в общем случае истинное направление не будет совпадать ни с одним из контрольных, для расчета потребуются интерполяционные методы. В классической теории оценивания параметров сигналов такая задача хорошо изучена. Общепризнанным является то, что приближенная оценка максимального правдоподобия может быть получена на основе разложения в ряд Тейлора по оцениваемому параметру отношения правдоподобия с точностью до членов второго (или более высокого) порядка. В рассматриваемой задаче воспользоваться указанным приближением возможно, если угловое разнесение контрольных направлений Δα не будет приводить к относительным задержкам на крайних элементах 7 задержки, большим длительности Δtи излучаемого импульса (см. фиг.2). Пояснить сформулированное требование поможет фиг.6, на которой показаны задержанные в каналах 1 наблюдения элементарные отраженные импульсы в случае двух соседних контрольных направлений.
Аналитическая формула относительной задержки, возникающей на крайних элементах 7 задержки для соседних контрольных направлений с индексами k и k+1, имеет вид:

Как можно видеть из последней формулы, самая большая относительная задержка на крайних элементах 7 задержки возникает в случае зондирования по нормали к антенной решетке α0=0. В этом случае

Исходя из того, что  получаем для шага сетки контрольных направлений следующее условие:
получаем для шага сетки контрольных направлений следующее условие:

Принимая во внимание то, что с точки зрения технических требований наилучшим является наибольший шаг сетки контрольных направлений, из (8) находим правило расчета оптимального Δα:
Использование конечного множества контрольных направлений  предполагает, что периодически формируются наборы, состоящие из 2k0+1 выборок
предполагает, что периодически формируются наборы, состоящие из 2k0+1 выборок 
Каждая из выборок в указанном наборе отвечает контрольному направлению с тем же значением индекса k. Более удобно представлять соответствующую выборку наблюдений для каждого контрольного направления в виде матрицы, размером M*(L+1)

Для каждого контрольного направления можно в соответствии с (3) сформировать условную оценку максимального правдоподобия принимаемого сигнала

получаемую как результат усреднения наблюдений по столбцам матрицы (10). Поскольку контрольные направления, в общем случае, не совпадают с истинным направлением обратного канала, то и оценки максимального правдоподобия сигналов (11) нельзя считать корректными. Для таких оценок предложено название обобщенных оценок максимального правдоподобия (ООМП) (см. работу Трифонов А.П., Шинаков Ю.С. Совместное различение сигналов и оценка их параметров на фоне помех. - М.: Радио и связь, 1986). Тем не менее, указанными ООМП принимаемых сигналов можно воспользоваться для расчета условных плотностей вероятностей и формирования ОМП направления прихода отраженного сигнала. Согласно принятой модели (1), условная плотность вероятности наблюдения выборки х(αk) для каждого контролируемого направления будет

Подставляя (11) в (12), получаем

где 
оценка дисперсии, построенная по выборке, сформированной из i-го столбца матрицы наблюдений Х(αk). Используя (13), (14), после несложных преобразований можно получить интерполяционное соотношение второго порядка для расчета ОМП направления прихода отраженного сигнала

где  - оценка контрольного направления, для которого достигается наибольшее значение условной вероятности (13) (грубая оценка направления прихода отраженного сигнала);
- оценка контрольного направления, для которого достигается наибольшее значение условной вероятности (13) (грубая оценка направления прихода отраженного сигнала);
- логарифмы условных плотностей вероятности (13), рассчитанные с точностью до компонент, не зависящих от наблюдений;  индексы, связанные с контрольными направлениями, соседними с
индексы, связанные с контрольными направлениями, соседними с  - значения статистик (16), рассчитанные для контрольных направлений
- значения статистик (16), рассчитанные для контрольных направлений  .
.
В позиции оценки максимального правдоподобия направления прихода отраженного сигнала (15) статистика  будет иметь минимум
будет иметь минимум

Для того, чтобы сформировать предпороговую статистику решающего правила подобную (6), в случае использования ОМП направления прихода отраженного сигнала (15), не обязательно обращаться к расчету  через выборки наблюдений
через выборки наблюдений  . Вместо этого снова можно воспользоваться интерполяционными соотношениями. Указанный подход приводит к следующему соотношению для предпороговой статистики:
. Вместо этого снова можно воспользоваться интерполяционными соотношениями. Указанный подход приводит к следующему соотношению для предпороговой статистики:
условные логарифмы отношений правдоподобия, сформированные в предположении о том, что отраженный сигнал приходит с k-го контрольного направления.
В соответствии с (19) асимптотически оптимальное, в смысле критерия Неймана-Пирсона, правило обнаружения отраженного сигнала имеет следующий вид:
где П - порог принятия решения о наличии сигнала, рассчитываемый из допустимого уровня ложных тревог.
Соотношения (15), (16) и (18)-(20) определяют структуру блоков оценки направления прихода и обнаружителя отраженного сверхширокополосного сигнала в искомом совместном алгоритме. На фиг.7 представлена блок-схема системы обнаружения и определения направления на цель (см. фиг.4) для случая, когда это направление заранее не известно. В этой блок-схеме треугольники обозначают первый - М-й антенные элементы, цепочки прямоугольников представляют линии задержки из первого - L-го элементов задержки, а кружками обозначены весовые элементы, в весе  каждого из которых i относится к номеру антенного элемента (i=1,..., M), j относится к отводу от выхода соответствующего элемента задержки (j=0, 1,..., L), к которому подключен вход данного весового элемента, а индексом k отмечен номер опорного направления (k=0, ±1, ±2,..., ±k0). Остальные блоки имеют те же обозначения и выполняют те же функции, что и на фиг.4. Приведенная на фиг.7 блок-схема обеспечивает обнаружение цели с одного из выбранных опорных направлений. Для всех
каждого из которых i относится к номеру антенного элемента (i=1,..., M), j относится к отводу от выхода соответствующего элемента задержки (j=0, 1,..., L), к которому подключен вход данного весового элемента, а индексом k отмечен номер опорного направления (k=0, ±1, ±2,..., ±k0). Остальные блоки имеют те же обозначения и выполняют те же функции, что и на фиг.4. Приведенная на фиг.7 блок-схема обеспечивает обнаружение цели с одного из выбранных опорных направлений. Для всех  опорных направлений эту блок-схему нужно повторить n раз, чтобы получить как бы n «слоев» изображенной на фиг.7 матрицы.
опорных направлений эту блок-схему нужно повторить n раз, чтобы получить как бы n «слоев» изображенной на фиг.7 матрицы.
При этом во втором варианте способа по настоящему изобретению выполняются следующие операции, отличные от операций наиболее близкого аналога:
формируют оценку величины принимаемого импульса в конкретный момент времени для каждого опорного направления из заранее выбранного конечного множества опорных направлений в угловом секторе контроля, причем эту оценку величины принимаемого импульса формируют путем суммирования сигналов на множестве отводов, отвечающих выбранному конкретному моменту времени, линий 6 задержек в каждом из каналов 1 наблюдения;
находят оценку формы принимаемого импульса по сформированным оценкам величины принимаемого импульса для различных конкретных моментов времени;
используют найденную оценку формы принимаемого импульса в качестве опорного сигнала в многоканальной корреляционной обработке;
на множестве результатов многоканальной корреляционной обработки выбирают корреляционный максимум, который используют в качестве предпороговой решающей статистики в процедуре обнаружения цели;
оценивают направление прихода отраженных импульсов в заранее заданном угловом секторе контроля с помощью интерполяционной оценки положения корреляционного максимума в окрестности того опорного направления из выбранного множества опорных направлений, для которого получен наибольший результат многоканальной корреляционной обработки.
Показанный на фиг.7 пример управления опорными направлениями с помощью весовой обработки является общим для второго варианта рассматриваемого способа локации цели. Для упрощения этой блок-схемы можно использовать различные интерполяционные методы, например методы восстановления сигналов в промежуточные моменты времени с помощью квадратичной формулы либо с помощью системы импульсных функций, пропорциональных выражению  используемому в теореме отсчетов Котельникова-Найквиста. Наиболее простой является линейная интерполяция. Она относится к большому классу интерполяционных оценок, базирующихся на ограниченном числе опорных точек, связываемых с нужной промежуточной (интерполируемой) позицией. В основе таких методов лежит свойство, заключающееся в том, что при некотором «запасе» по частоте дискретизации (например, для линейной интерполяции указанный «запас» подразумевает превышение граничного значения Котельникова-Найквиста в 2-2,5 раза) можно с большой степенью точности восстановить форму сигнала с помощью линейных комбинаций. В этом случае отпадает необходимость учитывать все сигналы, присутствующие на отводах линий 6 задержки для восстановления состояния в промежуточной позиции, достаточно использовать только опорные точки, совпадающие с границами интервала времени, в который попадает промежуточный момент. На фиг.8 показана блок-схема по фиг.7 для случая линейной интерполяции сигнала в промежуточных позициях для заданного опорного направления. При этом число операций взвешивания, равное в общем случае M(L+1), сократится до 2М. При такой линейной интерполяции находят веса линейных комбинаций сигналов на выходах элементов 7 задержки в разных каналах 1 наблюдения и используют эти найденные веса линейных комбинаций сигналов для формирования условных оценок формы принимаемых импульсов на заданном множестве дискретных временных позиций, согласующихся с одним из выбранного множества опорных направлений.
используемому в теореме отсчетов Котельникова-Найквиста. Наиболее простой является линейная интерполяция. Она относится к большому классу интерполяционных оценок, базирующихся на ограниченном числе опорных точек, связываемых с нужной промежуточной (интерполируемой) позицией. В основе таких методов лежит свойство, заключающееся в том, что при некотором «запасе» по частоте дискретизации (например, для линейной интерполяции указанный «запас» подразумевает превышение граничного значения Котельникова-Найквиста в 2-2,5 раза) можно с большой степенью точности восстановить форму сигнала с помощью линейных комбинаций. В этом случае отпадает необходимость учитывать все сигналы, присутствующие на отводах линий 6 задержки для восстановления состояния в промежуточной позиции, достаточно использовать только опорные точки, совпадающие с границами интервала времени, в который попадает промежуточный момент. На фиг.8 показана блок-схема по фиг.7 для случая линейной интерполяции сигнала в промежуточных позициях для заданного опорного направления. При этом число операций взвешивания, равное в общем случае M(L+1), сократится до 2М. При такой линейной интерполяции находят веса линейных комбинаций сигналов на выходах элементов 7 задержки в разных каналах 1 наблюдения и используют эти найденные веса линейных комбинаций сигналов для формирования условных оценок формы принимаемых импульсов на заданном множестве дискретных временных позиций, согласующихся с одним из выбранного множества опорных направлений.
В отличие от известных методов синтезированный выше совместный алгоритм предназначен для работы в условиях, когда форма принимаемого сигнала и направление его прихода неизвестны.
По этому алгоритму специалист может составить соответствующие программы для компьютерной обработки. Эти программы на машиночитаемых носителях данных, т.е. будучи преобразованы в программные продукты, при исполнении на компьютере будут обеспечивать реализацию соответствующего способа локации цели за счет обработки отраженных импульсов так, как это описано выше.
Промышленная применимость
Настоящее изобретение может использоваться в радиолокации, оптической, ультразвуковой и любой иной локации, в которой используется зондирование пространства сверхширокополосными импульсами. В частности, настоящее изобретение может найти применение при обнаружении различных целей, например воздушных или космических, а также в сейсмографии, томографии, при зондировании земных недр, морских глубин и атмосферы.
Приведенные примеры реализации способа по настоящему изобретению являются лишь иллюстрациями и не ограничивают объема патентных притязаний, который определяется только прилагаемой формулой изобретения с учетом всех возможных эквивалентов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система пассивной локации для определения координат летательного аппарата в ближней зоне аэродрома и на этапе захода на посадку с резервным каналом определения дальности | 2016 |
|
RU2633380C1 |
| СПОСОБ СВЕРХРАЗРЕШЕНИЯ СИГНАЛОВ ПО ВРЕМЕНИ В АКТИВНОЙ ЛОКАЦИИ | 2017 |
|
RU2658075C1 |
| СПОСОБ РАДИОЛОКАЦИИ НА ОСНОВЕ МНОГОПОЗИЦИОННЫХ СИСТЕМ ПЕРЕДАЧИ И ПРИЕМА | 2024 |
|
RU2840797C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ ДВУМЕРНОГО ПЕЛЕНГА И ЧАСТОТЫ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ | 2000 |
|
RU2190236C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И ЛОКАЛИЗАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2009 |
|
RU2420755C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2002 |
|
RU2240576C2 |
| СИСТЕМА ОБНАРУЖЕНИЯ ПОДВОДНЫХ И НАДВОДНЫХ ОБЪЕКТОВ | 2017 |
|
RU2670176C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО НЕЗАВИСИМОГО ВОЗДУШНОГО НАБЛЮДЕНИЯ В ДАЛЬНЕЙ ЗОНЕ НАВИГАЦИИ | 2017 |
|
RU2663182C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2009 |
|
RU2410712C1 |
| МНОГОПОЗИЦИОННЫЙ ПАССИВНЫЙ РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС, РЕАЛИЗУЮЩИЙ КОМБИНИРОВАННЫЙ ОДНОЭТАПНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА ЭТАПЕ ЗАХОДА НА ПОСАДКУ | 2015 |
|
RU2632922C2 |






Изобретение относится к технике обнаружения цели и определения направления на цель. Использование данного изобретения при локации цели с помощью сверхширокополосных импульсов позволяет принимать сигналы, приходящие с не только с заранее выбранных опорных направлений. Способ реализуется путем приема отраженных от цели сверхширокополосных импульсов, задержки их на разные временные величины в разных каналах наблюдения и многоканальной обработки. В первом варианте настоящего способа выполняют оценку формы принимаемого импульса на множестве дискретных временных позиций путем усреднения по каналам наблюдения при известном направлении прихода отраженных импульсов в заранее заданном угловом секторе контроля, а затем используют найденную оценку формы принимаемого импульса в качестве опорного сигнала в многоканальной корреляционной обработке. Во втором варианте формируют оценку величины принимаемого импульса в конкретный момент времени для каждого опорного направления в заранее заданном угловом секторе контроля; находят оценку формы принимаемого импульса по сформированным оценкам величины принимаемого сигнала для различных дискретных моментов времени; используют найденную оценку формы принимаемого импульса в качестве опорного сигнала в многоканальной корреляционной обработке; на множестве результатов корреляционной обработки выбирают корреляционный максимум, который используют в качестве предпороговой решающей статистики в процедуре обнаружения цели; оценивают направление прихода отраженных импульсов с помощью интерполяционной оценки положения корреляционного максимума в окрестности того опорного направления, для которого получен наибольший результат многоканальной корреляционной обработки. 4 н. и 2 з.п. ф-лы, 9 ил.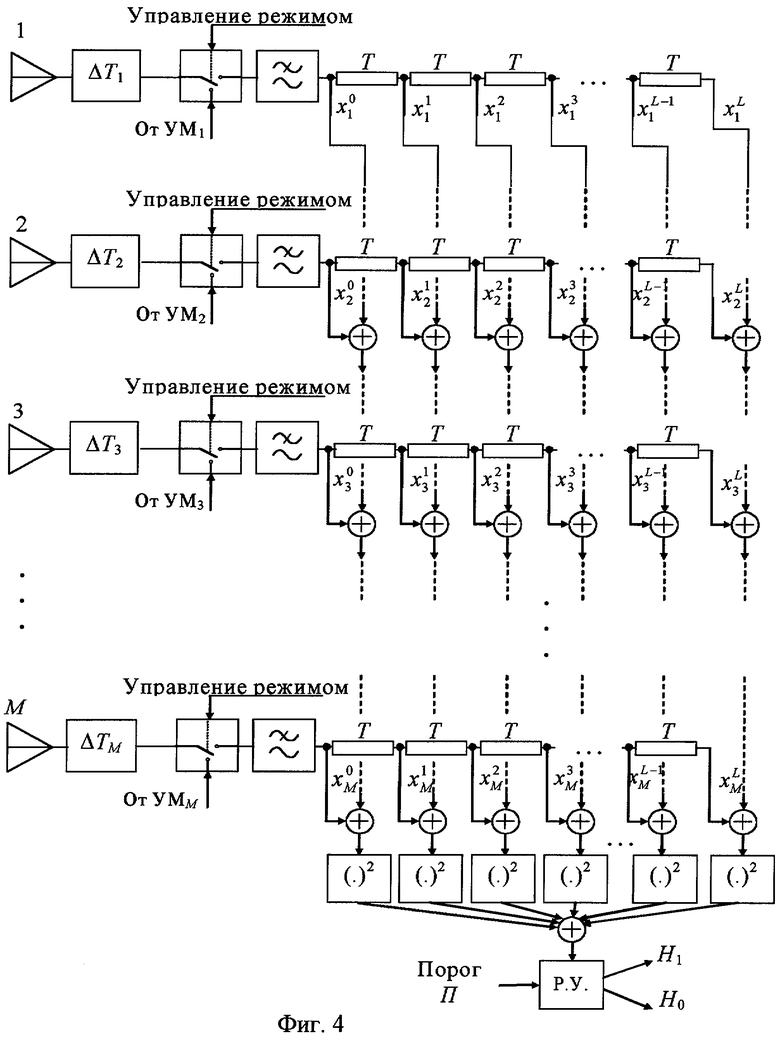
| US 6515622 А, 04.02.2003 | |||
| Стиральная машина для обработки колпаков валеной обуви | 1932 |
|
SU30439A1 |
| СПОСОБ ОБНАРУЖЕНИЯ ВТОРЖЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА В КОНТРОЛИРУЕМУЮ ЗОНУ | 1998 |
|
RU2133046C1 |
| СПОСОБ ПРИЕМА ШИРОКОПОЛОСНОГО СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 1999 |
|
RU2153770C1 |
| US 5544252 А, 06.08.1996 | |||
| US 2002174078 А, 21.11.2002 | |||
| WO 9960517 А1, 25.11.1999 | |||
| ТРАНСПОРТЕР ДЛЯ СПРЕССОВЫВАНИЯ СИГАРЕТНЫХ БЛОКОВ | 1995 |
|
RU2082655C1 |

