Изобретение относится к области радиотехники, в частности к системам дистанционного зондирования, предназначенным для получения высокодетальных радиолокационных изображений (РЛИ) земной поверхности. Радиолокационные системы, предназначенные для решения этой задачи, используют принцип синтезирования апертуры антенны. До настоящего времени широко применяются однопозиционные РСА, когда передатчик и приемник находятся на борту одного и того же движущегося носителя. Существующие способы построения однопозиционных радиолокационных систем с синтезированной апертурой антенны (см. Радиолокационные станции обзора Земли / под. ред. Г.С.Кондратенкова. - М.: Радио и связь, 1983. - 272 с.) хорошо отработаны и широко используются в настоящее время. Однако им присущи следующие недостатки:
1. низкая скрытность;
2. низкая помехоустойчивость как по отношению к активным, так и по отношению к пассивным помехам (уголковым отражателям);
3. РСА космического базирования требуют использования крупногабаритных и дорогостоящих антенных решеток с узкими диаграммами направленности в азимутальной плоскости;
4. низкая оперативность (в большинстве случаев невозможность) получения набора разноракурсных изображений наблюдаемых объектов и, следовательно, недостаточная информативность однопозиционных систем.
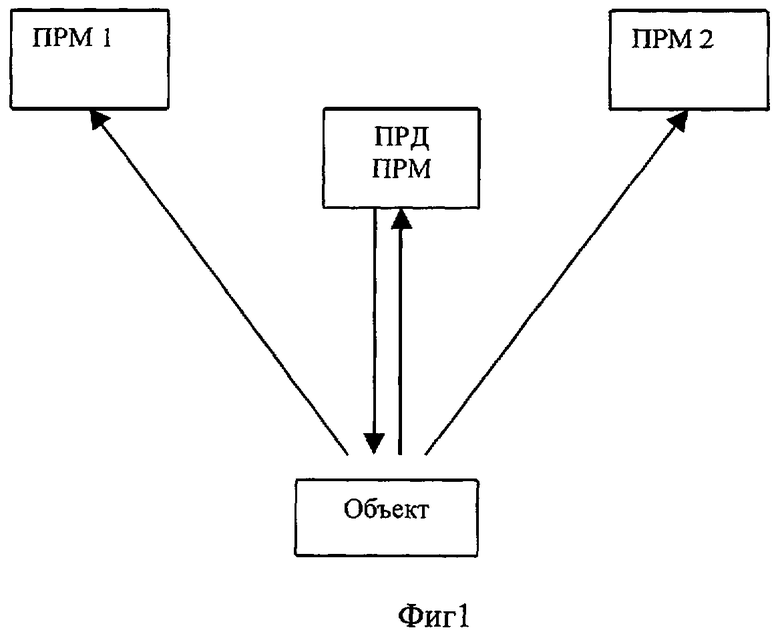
Наиболее близким по своей сущности к заявляемому изобретению (прототипом) следует считать способ построения авиационной многопозиционной РСА (МП РСА) (см. Радиолокационные станции обзора Земли / под. ред. Г.С.Кондратенкова. - М.: Радио и связь, 1983. - 272 с.), заключающийся в том, что в составе МП РСА используется одна приемопередающая и две приемные позиции (фиг.1). Последовательность операций при реализации способа следующая:
1. Направляют антенну передатчика (ПРД) на заданный участок земной поверхности.
2. С борта носителя приемопередатчика излучают импульсный зондирующий сигнал.
3. Направляют диаграммы направленности (ДН) N приемных позиций на заданный участок земной поверхности.
4. Принимают отраженный сигнал в двух или более разнесенных позициях.
5. На борту каждой из приемных позиций (ПРМ) осуществляют запись сигнала радиолокационной голограммы.
6. На борту каждой из приемных позиций выполняют синтез радиолокационного изображения (РЛИ) наблюдаемого участка земной поверхности. Всего таких изображений будет N - по числу носителей приемников в системе.
7. Транспортируют N полученных разноракурсных РЛИ в пункт обработки.
8. Производят анализ набора разноракурсных РЛИ.
Данный способ повышает скрытность функционирования приемной позиции, так как там нет передатчика, и помехоустойчивость по отношению к такому источнику пассивных помех как уголковые отражатели (для носителей только приемной позиции (Фиг.1)). Появляется и возможность сформировать многоракурсное изображение наблюдаемого объекта. Основными недостатками данного метода являются:
1. Низкая скрытность приемно-передающей позиции и ее низкая помехоустойчивость по отношению к такому источнику пассивных помех, как уголковые отражатели.
2. Низкая помехоустойчивость по отношению к активным помехам, поскольку все носители ПРМ работают на едином сигнале и наличие активной помехи сделает невозможным функционирование всей системы.
3. Низкая оперативность объединения разноракурсных РЛИ на борту хотя бы одного из носителей МП РСА или в едином пункте обработки.
4. При больших скоростях перемещения носителей потребуется использование крупногабаритных и дорогостоящих антенных решеток в составе каждой приемной позиции с узкими диаграммами направленности в азимутальной плоскости.
5. Сложность согласованного управления узкими диаграммами направленности антенн во времени и пространстве при наведении их на заданный участок земной поверхности.
Целью изобретения является повышение оперативности получения набора разноракурсных РЛИ в многопозиционной РСА, а также повышение помехоустойчивости системы.
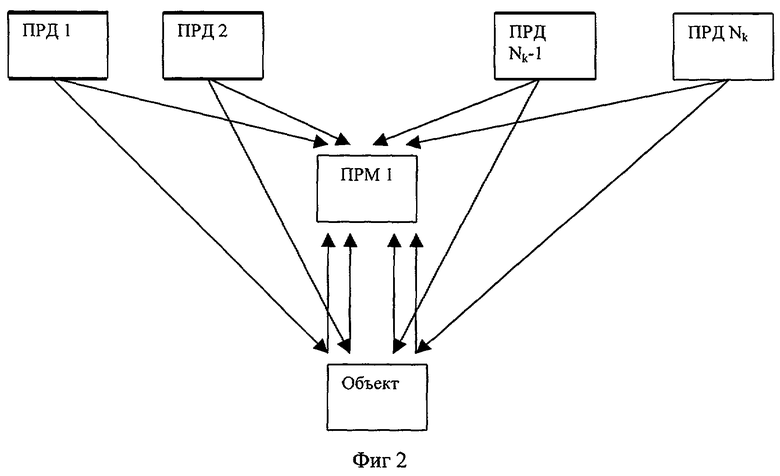
Суть способа заключается в следующем (Фиг.2). В отличие от прототипа, способ реализуется с использованием N передающих и одной приемной позиций.
1. С борта N передающих позиций (ПРД) излучают N независимых ортогональных сигналов S1...SN.
2. Ориентируют диаграммы направленности (ДН) всех N передающих позиций на заданный участок земной поверхности.
3. Диаграмму направленности первой приемной антенны направляют в сторону заданного участка земной поверхности, а ДН второй слабонаправленной приемной антенны ориентируют по направлению на N передающих позиций.
4. На борту приемной позиции при помощи антенны, сориентированной в направлении заданного участка земной поверхности, принимают N ортогональных сигналов S1OТР...SNOТР, отраженных от наблюдаемого участка земной поверхности.
5. На борту приемной позиции при помощи антенны, сориентированной по направлению передающей позиции, принимают N ортогональных сигналов прямого распространения S1ПР...SNПР, непосредственно поступающих с N передающих позиций.
6. Из сигналов прямого распространения S1ПР...SNПР выделяют информацию о состоянии каждого передатчика и его носителя и о состоянии среды распространения.
7. На борту приемной позиции для каждой из соответствующих друг другу N пар прямых и отраженных сигналов записывают N радиолокационных голограмм, соответствующих N различным ракурсам облучения наблюдаемого участка земной поверхности каждым из носителей передатчика.
8. На борту приемной позиции синтезируют одновременно N разноракурсных радиолокационных изображения (РЛИ) наблюдаемого участка земной поверхности.
9. Производят совместный анализ набора из N разноракурсных РЛИ.
Предлагаемый способ построения МП РСА свободен от недостатков прототипа и обеспечивает получение следующих преимуществ:
1. Повышается оперативность МП РСА за счет одновременного формирования N независимых разноракурсных изображений одного и того же участка земной поверхности на борту одного носителя приемной позиции.
2. Повышается помехоустойчивость системы за счет использования N ортогональных независимых зондирующих сигналов.
3. Обеспечивается максимальная скрытность функционирования приемной позиции.
4. Не ограничивается количество приемных позиций в составе МП РСА предложенной структуры.
5. Обеспечивается полная невосприимчивость МП РСА по отношению к такому источнику пассивных помех, как уголковые отражатели.
6. Открывается возможность использования непрерывного зондирующего сигнала. Это повышает энергетический потенциал системы и позволяет отказаться при больших скоростях перемещения носителя от использования на борту носителя приемника крупногабаритных и дорогостоящих антенных решеток с узкими диаграммами направленности в азимутальной плоскости в составе каждой приемной позиции. Применение слабонаправленных антенн устраняет недостаток, связанный с необходимостью согласованного управления во времени и пространстве диаграммами направленности приемных и передающих антенн.
7. Взаимнокорреляционная обработка отраженных сигналов S1OТР...SNOТР и сигналов прямого распространения S1ПР...SNПР открывает возможность использования в МП РСА сигналов с априорно неизвестным законом модуляции.
8. Повышается вероятность правильного обнаружения и правильного распознавания объектов наблюдения, поскольку некогерентное объединение разноракурсных РЛИ ведет к снижению интенсивности спекл-шума на РЛИ и увеличению отношения сигнал/шум на изображении.
Схема устройства, реализующего предлагаемый способ получения радиолокационного изображения земной поверхности при помощи многопозиционной радиолокационной системы с синтезированной апертурой антенн, представлена на фиг.3. На фиг.3. введены следующие обозначения:
1 - навигационные КА (НКА) спутниковой радионавигационной системы ГЛОНАСС/GPS (N НКА);
2 - участок земной поверхности, облучаемый сигналами S1...SN;
3 - антенна для приема отраженных сигналов S1ОТР...SNОТР;
4 - слабонаправленная антенна для приема сигналов прямого распространения (опорных сигналов) S1ПР...SNПР;
5 - приемник сигналов прямого распространения;
6 - устройство для фазирования сигналов прямого распространения (опорных сигналов) S1ПР...SNПР и отраженных сигналов S1ОТР...SNОТР, выделения эфемеридной информации о всех видимых навигационных КА (НКА), синхронизации шкалы времени и контроля состояния ионосферы;
7 - устройство вычисления взаимнокорреляционной функции между соответствующими сигналами прямого распространения S1ПР...SNПР и отраженными сигналами S1ОТР...SNОТР и формирования N радиолокационных голограмм;
8 - приемник отраженных сигналов;
9 - устройство синтезирования N радиолокационных разноракурсных изображений;
10 - борт носителя приемной позиции.
Устройство включает в себя носитель приемника и до 24 носителей передатчиков, в качестве которых используются НКА ГЛОНАСС и GPS, имеющих высоту орбиты 19100 км и 20000 км соответственно. В качестве зондирующего сигнала используют двухчастотный широкополосный непрерывный шумоподобный навигационный сигнал, излучаемый каждым НКА СРНС. Одновременно используют сигналы как высокой (ВТ), так и пониженной точности (ПТ) в двух частотных диапазонах СРНС (L1˜1.5 ГТц и L2˜1.2 ГГц). Одновременный прием двухчастотного зондирующего сигнала позволит дополнительно сформировать в два раза больше независимых РЛИ наблюдаемого объекта и повысить помехоустойчивость системы в целом.
Поскольку НКА СРНС ГЛОНАСС/GPS оснащены слабонаправленными антеннами, то это устраняет необходимость в согласованном управлении их ДН. В формировании изображения принимают участие только те НКА из 24-х, для которых выполняется условие взаимной видимости НКА (1) - участок земной поверхности (2) и борт приемника (10). Для авиационного ностителя число таких НКА достигает 6...12.
В качестве носителя приемника может использоваться пилотируемый самолет, беспилотный летательный аппарат, низковысотный КА и т.д. Количество одновременно функционирующих приемных позиций в МП РСА предлагаемой структуры неограниченно.
Порядок функционирования устройства следующий:
1. С борта N передающих позиций (1), в качестве которых выступают НКА СРНС ГЛОНАСС/GPS, излучают N независимых ортогональных сигналов S1...SN в двух частотных диапазонах L1 и L2.
2. Ориентируют диаграммы направленности (ДН) всех N передающих позиций в направлении Земли, что предусмотрено логикой функционирования СРНС ГЛОНАСС и GPS.B этом случае любой участок земной поверхности облучается сигналом этих систем.
3. Диаграмму направленности первой приемной антенны (3) направляют в сторону заданного участка земной поверхности, а ДН второй слабонаправленной приемной антенны (4) ориентируют по направлению в верхнюю полусферу в сторону видимых НКА.
4. На борту приемной позиции (10) при помощи антенны, сориентированной в направлении заданного участка земной поверхности (3) и приемника (8), принимают N ортогональных сигналов S1OTP...SNОТР, отраженных от наблюдаемого участка земной поверхности (2). Прием отраженных поверхностью сигналов, прошедших трассу "передатчик - поверхность - приемник", производят на борту носителя приемника (10) в течение интервала когерентного накопления Тc. На борту носителя приемника регистрируют амплитуду и фазу принимаемых сигналов.
5. На борту приемной позиции (10) при помощи антенны, сориентированной по направлению в верхнюю полусферу (4) и приемника (5), принимают N ортогональных сигналов прямого распространения S1ПР...SNПР, непосредственно поступающих с N передающих позиций (1).
6. Из сигнала прямого распространения на борту носителя приемника (10) при помощи устройства (6) выделяют эфемеридную информацию о всех видимых НКА, осуществляют синхронизацию бортовой шкалы времени и выполняют оперативный контроль параметров ионосферы двухчастотным способом в интересах последующей обработки сигналов на этапе синтеза радиолокационного изображения (РЛИ) МП РСА.
7. На борту приемной позиции для каждой из соответствующих друг другу N пар прямых и отраженных сигналов в устройстве (7) записывают N радиолокационных голограмм, соответствующих N различным ракурсам облучения наблюдаемого участка земной поверхности каждым из носителей передатчика. С целью обеспечения разрешения по дальности для каждой пары сигналов (SjОТР и SjПР, j=1...N) сначала выполняют взаимнокорреляционную обработку с учетом всех возможных значений относительных задержек τi, i=1...Nr, в пределах полосы захвата. Выполнение данного этапа эквивалентно формированию радиолокационной голограммы и распределению отсчетов принимаемого сигнала по полосам равной суммарной дальности (передатчик - объект - приемник), причем каждой полосе равной суммарной дальности соответствует свое значение задержки τi, τ=1...Nr, где Nr - количество полос равной суммарной дальности.
8. На борту приемной позиции (10) в устройстве (9) одновременно синтезируют N разноракурсных радиолокационных изображения (РЛИ) наблюдаемого участка земной поверхности;
9. Производят совместный анализ набора из N разноракурсных РЛИ. Полученные N независимых разноракурсных РЛИ объединяют путем некогерентного усреднения или дешифрируют раздельно.
Предлагаемый способ и устройство, его реализующее, обладают указанными выше преимуществами, исходя из следующих рассуждений:
1. Оперативность получения РЛИ в МП РСА предлагаемой структуры по сравнению с прототипом повышается вследствие того, что отпадает необходимость транспортирования записанных радиолокационных голограмм в единый центр обработки и синтеза РЛИ, поскольку в данном случае все N независимых разноракурсных изображения одного и того же участка земной поверхности могут быть сразу сформированы на борту одного носителя приемной позиции.
2. Повышается скрытность работы МП РСА, поскольку работа ее приемной позиции осуществляется на фоне штатного функционирования СРНС ГЛОНАСС/GPS, а реализация приема сигналов одновременно в двух частотных диапазонах СРНС или использование методов частотного разделения зондирующих сигналов (как в ГЛОНАСС) повышает помехоустойчивость МП РСА по сравнению с прототипом, работающим на едином зондирующем сигнале.
3. Помехоустойчивость повышается также за счет увеличения количества используемых в системе зондирующих сигналов в 2N раз, где N - количество НКА.
4. МП РСА предлагаемой структуры не отрицает одновременного независимого функционирования неограниченного числа носителей приемных позиций, работающих в соответствии с едиными принципами и алгоритмами получения РЛИ.
5. Вероятность правильного обнаружения объекта на РЛИ повышается за счет некогерентного объединения N разноракурсных РЛИ, которое приводит к увеличению отношения сигнал/шум на изображении в  раз, что равносильно повышению вероятности правильного обнаружения объекта РD на РЛИ:
раз, что равносильно повышению вероятности правильного обнаружения объекта РD на РЛИ:  [Теоретические основы радиолокации. Под ред. Дулевича В.Е. - 2-е изд., переаб. и доп. - М., Сов. радио, 1978. - 608 с.],
[Теоретические основы радиолокации. Под ред. Дулевича В.Е. - 2-е изд., переаб. и доп. - М., Сов. радио, 1978. - 608 с.],
где РF - заданная вероятность ложного обнаружения;
N0 - спектральная плотность шума;
Ф - интеграл вероятности;
Э - энергия сигнала объекта на одном РЛИ.
5. Разрешающая способность по азимуту одной пары "передатчик - приемник" в составе МП РСА определяется выражением

где LПРД=VПРД·ТС - размер синтезированной апертуры на передачу;
Lпрм=Vпрм·TС - размер синтезированной апертуры на прием;
Vпрд - скорость движения носителя передатчика;
Vпрм - скорость движения носителя приемника;
ТС - время когерентного накопления.
6. Разрешающая способность поперек линии пути носителя приемника (по дальности) зависит от ширины полосы сигнала и определяется выражением

где ΔFс - ширина полосы зондирующего сигнала.
Таким образом, в МП РСА с широкополосным непрерывным зондирующим сигналом, как и в однопозиционной РСА, разрешающая способность поперек линии пути носителя приемника определяется шириной спектра зондирующего сигнала, а разрешающая способность вдоль линии пути носителя приемника - длительностью интервала когерентного накопления траекторного сигнала.
Например, разрешающая способность по суммарной дальности δу при использовании в качестве зондирующего широкополосного сигнала GPS может быть доведена до величины ˜30 м, а в случае использования в качестве зондирующего широкополосного сигнала ГЛОНАСС - ˜60 м. Разрешение по азимуту может быть доведено до соизмеримых величин путем подбора длительности интервала когерентного накопления (зависит от скорости движения носителя приемника).
7. Способ не требует использования на приемной позиции антенн с большими продольными размерами в отличие от аналогов, поскольку интервал однозначности РЛИ Δхо по продольной координате для одной пары "передатчик - приемник" МП РСА определяется выражением

где Тп - период дискретизации непрерывного широкополосного зондирующего сигнала на борту носителя приемника.
Из выражения (2) следует, что ширина диаграммы направленности реальной антенны приемника для исключения появления неоднозначности на РЛИ должна выбираться из условия

Если воспользоваться теперь выражением (2) и подставить параметры, соответствующие разнесенной РСА, использующей непрерывный шумоподобный сигнал как в системе GPS (λ=0,19 м, Тп=20 МГц, Rпрм=500 км, Rпрд=20000 км, Vпрм=8 км/с, Vпрд=8 км/с), получим, что интервал однозначного формирования РЛИ по азимуту Δхo составит величину, превышающую 230 тыс.км. Это означает, что можно обойтись в РСА с непрерывным широкополосным зондирующим сигналом без дорогостоящих и громоздких ФАР больших размеров и оборудовать их более простыми и слабонаправленными антеннами, обеспечив при этом требуемую энергетику радиоканала, за счет увеличения времени когерентного накопления и базы зондирующего сигнала.
Внедрение разработанного способа не требует разработки специальных КА радиолокационной подсветки. В качестве зондирующих могут использоваться как открытые, так и закрытые навигационные сигналы функционирующих КА в составе СРНС ГЛОНАСС, GPS или Galeleo, а также КА связи.
Изменения в основном относятся к этапу обработки радиолокационных сигналов на этапе синтеза изображения наблюдаемого участка земной поверхности.
Таким образом, достигается цель предлагаемого изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФРОНТАЛЬНОГО СИНТЕЗИРОВАНИЯ АПЕРТУРЫ АНТЕННЫ ЗЕМНОЙ ПОВЕРХНОСТИ С ИСКЛЮЧЕНИЕМ СЛЕПЫХ ЗОН В ПЕРЕДНЕЙ ЗОНЕ С ПОМОЩЬЮ МНОГОПОЗИЦИОННОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЫ | 2014 |
|
RU2560082C2 |
| Способ глобальной активно-пассивной многопозиционной спутниковой радиолокации земной поверхности и околоземного пространства и устройство для его осуществления | 2019 |
|
RU2700166C1 |
| УСТРОЙСТВО ПОЛУЧЕНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ | 2019 |
|
RU2719535C1 |
| СПОСОБ ПОЛУЧЕНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ УЧАСТКА ЗЕМНОЙ ПОВЕРХНОСТИ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ (ВАРИАНТЫ) | 2012 |
|
RU2526850C2 |
| Способ измерения рельефа поверхности Земли | 2016 |
|
RU2643790C1 |
| Способ оптимального восстановления изображений в радиолокационных системах дистанционного зондирования Земли | 2016 |
|
RU2624460C1 |
| Способ определения высоты рельефа местности радиолокатором с синтезированной апертурой антенны | 2019 |
|
RU2707556C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННОМУ ИЗОБРАЖЕНИЮ | 2017 |
|
RU2656366C1 |
| Способ измерения кратковременных смещений на поверхности Земли | 2024 |
|
RU2837515C1 |
| Способ формирования радиолокационного изображения земной поверхности бортовой радиолокационной станцией | 2019 |
|
RU2717256C1 |
Изобретение относится к области радиотехники, в частности к системам дистанционного зондирования, предназначенным для получения высокодетальных радиолокационных изображений (РЛИ) земной поверхности. Наблюдаемый участок земной поверхности облучают ортогональными сигналами от N передатчиков. На интервале когерентного накопления осуществляют одновременный прием отраженных сигналов и сигналов прямого распространения каждого из N передатчиков, выделяют из сигналов прямого распространения каждого из N передатчиков эфемеридную информацию о его носителе, информацию о бортовой шкале времени и параметрах ионосферы, выполняют с учетом этой информации попарную взаимокорреляционную обработку принятых сигналов, синтезируют одновременно N независимых разноракурсных радиолокационных изображений. Достигаемый технический результат - повышение помехоустойчивости функционирования системы и ее информативности, повышение качества формируемого радиолокационного изображения наблюдаемого участка земной поверхности. 3 ил.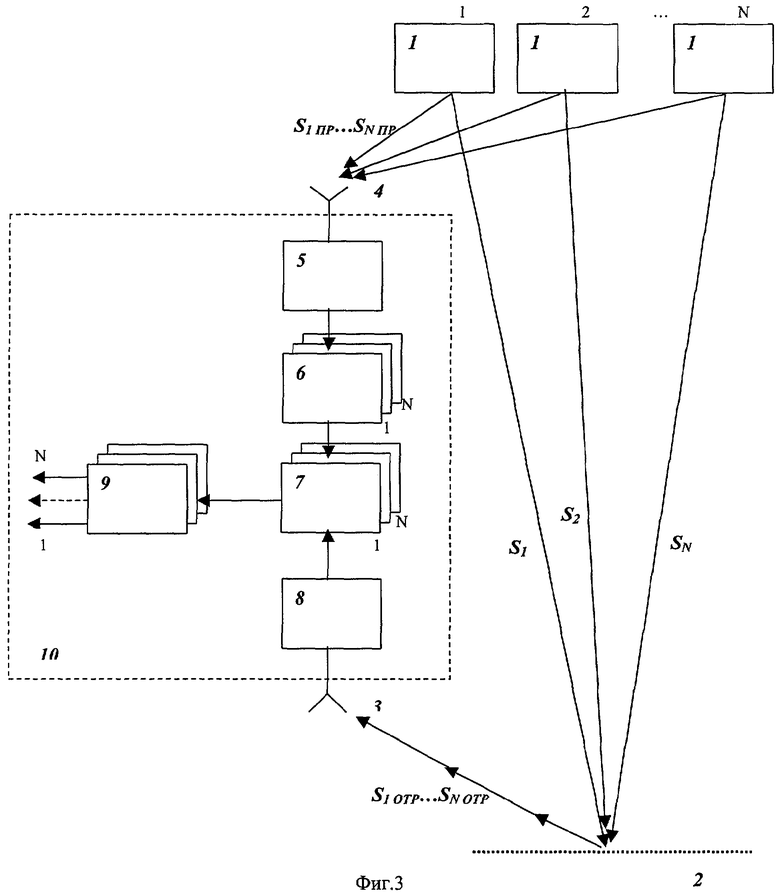
Способ получения радиолокационного изображения земной поверхности при помощи многопозиционной радиолокационной системы с синтезированной апертурой антенны, отличающийся тем, что наблюдаемый участок земной поверхности облучают ортогональными сигналами от N передатчиков, на борту одного или нескольких носителей приемников осуществляют одновременный прием отраженных сигналов прямого распространения каждого из N передатчиков, выделяют из сигналов прямого распространения каждого из N передатчиков эфемеридную информацию о его носителе, информацию о бортовой шкале времени и параметрах ионосферы, выполняют с учетом этой информации попарную взаимокорреляционную обработку принятых прямого и отраженного поверхностью сигналов, синтезируют одновременно N независимых разноракурсных радиолокационных изображений наблюдаемого участка земной поверхности.
| Радиолокационные станции обзора Земли | |||
| Под ред | |||
| КОНДРАТЕНКОВА Г.С | |||
| - М.: Радио и связь, 1983, с.272 | |||
| Способ дистанционного зондирования атмосферы и подстилающей поверхности Земли | 1983 |
|
SU1111582A1 |
| СПОСОБ ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ | 1998 |
|
RU2143708C1 |
| US 5557283 A, 17.09.1996 | |||
| Устройство для получения потока сыпучих материалов с заданной плотностью | 1977 |
|
SU690315A1 |
| US 5384573 А, 24.01.1995. | |||

