Изобретение относится к области радиолокации, в частности к радиолокационным станциям, устанавливаемым на летательных аппаратах, и предназначено для решения задач картографирования земной поверхности.
Известен способ картографирования земной поверхности бортовой радиолокационной станцией, основанный на излучении и приеме антенной отраженных от земной поверхности сигналов при перемещении луча антенны в заданном секторе углов по азимуту и формировании радиолокационного изображения (РЛИ) поверхности Земли [Многофункциональные радиолокационные системы / под ред. Б.Г. Татарского, М.: «Дрофа», 2007 г., стр. 167-174]. Такой способ формирования радиолокационного изображения земной поверхности называется «Картографирование реальным лучом». Недостатком данного способа является низкое разрешение по азимуту, которое определяется шириной главного луча диаграммы направленности антенны (ДНА) по азимуту.
Методы доплеровского обужения луча (ДОЛ) или фокусированной синтезированной апертуры (ФСА) антенны позволяют получить РЛИ с разрешением на порядки выше, используя зависимость доплеровского смещения частоты отраженного сигнала от углового положения отражающего элемента поверхности, что обеспечивает разделение целей, попадающих в один луч ДНА [Многофункциональные радиолокационные системы под ред. Б.Г. Татарского. М.: ООО «Дрофа», 2007 г., стр. 174-195].
Недостатком этого технического решения является то, что синтезирование апертуры антенны в зоне углов ± 10° в горизонтальной плоскости (по азимуту) относительно вектора скорости летательного аппарата известными методами представляется невозможным ввиду уплотнения спектра сигнала, усложняющего условия синтезирования апертуры антенны, а также наложения «зеркальных» спектральных составляющих. Эти факторы не позволяют с помощью традиционного радиолокатора с синтезированной апертурой (РСА) получить необходимую разрешающую способность в переднем секторе для распознавания наземных целей с высокой вероятностью.
Наиболее близким по технической сущности является «Способ картографирования земной поверхности бортовой радиолокационной станцией (БРЛС)» [RU 2529523, опубликовано 27.09.2014, МПК G01S 13/89]. Способ основан на излучении сигналов, приеме антенной отраженных от земной поверхности сигналов и их накоплении при перемещении луча антенны в переднем секторе углов по азимуту, синтезировании апертуры антенны и формировании радиолокационного изображения. При этом излучение и прием отраженного сигнала во всем секторе обзора осуществляется когерентно при сканировании луча вблизи нулевого ракурса, когда реальный луч, плавно перемещаясь, охватывает весь передний сектор, при этом создавая за счет сканирования дополнительное расширение спектра принимаемого сигнала. Затем осуществляют определение фазового набега за период повторения принятого когерентного радиолокационного сигнала, компенсации фазового набега, формирование двух сигналов из скомпенсированного сигнала с разными знаками крутизны частотной модуляции, выделение сигнала с положительной и отрицательной крутизнами, соответствующим сигналам, принятым справа и слева относительно направления движения летательного аппарата, величины которых пропорциональны азимутальному направлению луча, спектральный анализ полученных сигналов, объединение полученных изображений из двух сигналов в одно радиолокационное изображение.
Недостатком указанного способа является низкое разрешение по азимуту, несмотря на применение синтезирования апертуры.
Технической проблемой, на решение которой направлено заявляемое изобретение, является повышение вероятности распознавания целей на радиолокационном изображении вблизи линии пути носителя бортовой радиолокационной станции (БРЛС) (азимутальная зона углов ± 10°).
Техническим результатом предлагаемого изобретения является повышение разрешающей способности по азимуту вблизи линии пути носителя БРЛС.
Сущность изобретения заключается в том, что когерентно излучают и накапливают сигнал в процессе сканирования лучом диаграммы направленности антенны вблизи линии пути носителя бортовой радиолокационной станции, когда луч диаграммы направленности антенны, плавно перемещаясь, охватывает весь передний сектор. Затем определяют фазовый набег за период повторения накопленного когерентного сигнала, компенсируют фазовый набег и определяют крутизну частотной модуляции накопленного сигнала. Далее выделяют сигнал с положительной и отрицательной крутизнами частотной модуляции, соответствующим сигналам, принятым справа и слева относительно линии пути носителя радиолокационной станции, осуществляют спектральный анализ полученных сигналов, объединяют полученные спектральным анализом массивы амплитуд из двух сигналов в один массив амплитуд.
Новым в заявляемом способе является то, что когерентное накопление сигнала осуществляют по суммарной и разностной азимутальной диаграммам направленности антенны, при этом фазовый набег за период повторения и крутизну частотной модуляции накопленных когерентных сигналов по суммарной и разностной азимутальной диаграммам направленности определяют только по сигналу, накопленному по суммарной диаграмме направленности антенны. Компенсацию фазового набега, разделение сигналов принятых слева и справа от линии пути носителя бортовой радиолокационной станции, спектральный анализ и объединение массивов амплитуд осуществляют для сигналов, накопленных по суммарной и разностной азимутальной диаграммам направленности антенны. После формирования двух объединенных массивов амплитуд вычитают поэлементно массив амплитуд, сформированный из сигналов, накопленных по разностной азимутальной диаграмме направленности, из массива амплитуд, сформированного из сигналов, накопленных по суммарной диаграмме направленности, и формируют радиолокационное изображение.
На Фиг. 1 представлена функциональная схема бортовой радиолокационной станции, осуществляющей способ.
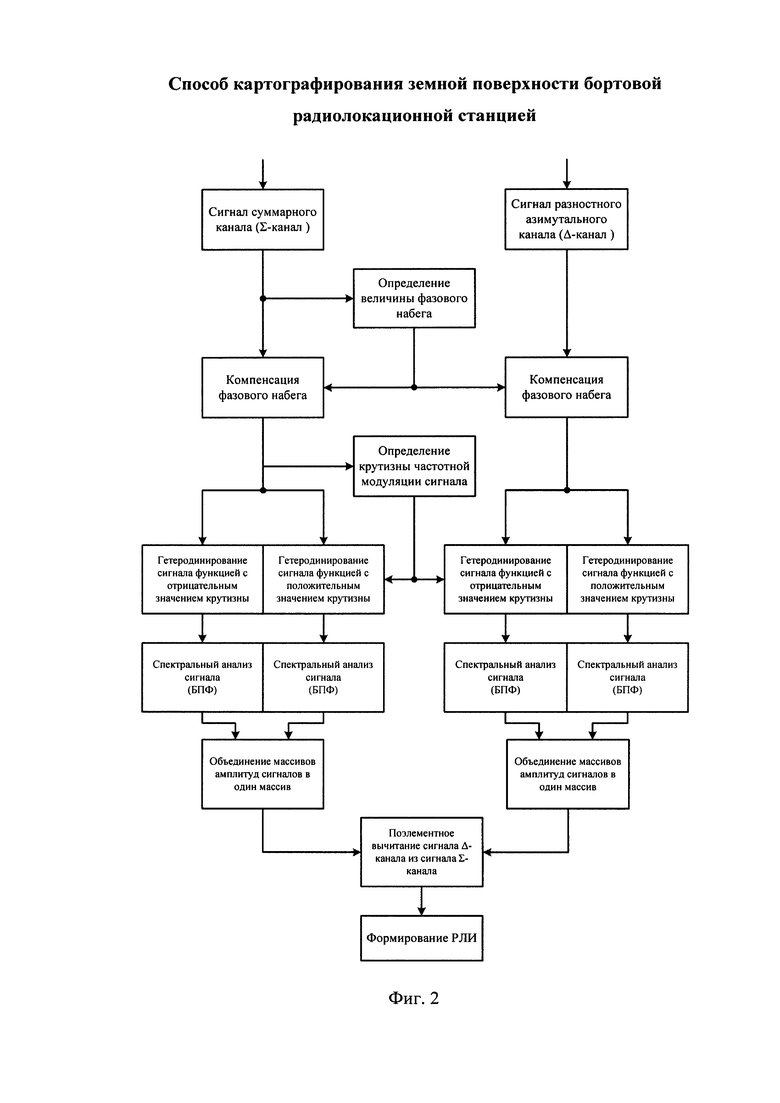
На Фиг. 2 приведена блок-схема алгоритма сигнальной обработки накопленного радиолокационного сигнала.
Способ картографирования земной поверхности бортовой радиолокационной станцией может быть реализован, например, в бортовой радиолокационной станции в режиме работы воздух-поверхность, состоящей из антенны (1), передатчика (2), приемника (3), процессора управления (4), процессора сигналов (5), индикатора (6). Выход процессора управления (4) соединен с первым входом антенны (1), выход передатчика (2) соединен со вторым входом антенны (1). Первый выход антенны (1) соединен с первым входом приемника (3), второй выход антенны (1) соединен со вторым входом приемника (3). Первый выход приемника (3) подключен к первому входу процессора сигналов (5), второй выход приемника (3) подключен ко второму входу процессора сигналов (5). Выход процессора сигналов (5) подключен к входу индикатора (6).
Способ картографирования земной поверхности бортовой радиолокационной станцией осуществляется следующим образом.
Режим картографирования запускается летчиком соответствующей командой из процессора управления (4). Луч ДНА выставляется антенной (1) на одну из границ зоны обзора. После установки луч начинает плавно перемещаться в азимутальной плоскости (пусть антенна (1) сканирует справа налево в переднем секторе обзора, например ± 10° по азимуту), проводя сканирование зоны обзора по азимуту. В процессе обзора антенна (1) излучает сформированный передатчиком (2) когерентный радиолокационный сигнал (простые радиоимпульсы, фазокодоманипулированные (ФКМ) или линейно частотно-модулированные (ЛЧМ) сигналы) с периодом повторения, обеспечивающим перекрытие доплеровского диапазона частот, попадающих в зону обзора, и однозначное перекрытие зоны по дальности.
Отраженный от земной поверхности сигнал принимается антенной (1) по двум лучам ДНА - суммарному и разностному азимутальному. В качестве антенны (1) могут использоваться антенны различных типов, в том числе активные и пассивные фазированные антенные решетки, щелевые решетки, позволяющие одновременно формировать указанные два типа ДНА. С выходов антенны (1) сигнал по двум каналам (суммарному и разностному азимутальному) поступает в приемник (3), где осуществляется аналоговая обработка сигнала. Затем принятый сигнал, так же по двум каналам, когерентно накапливается в процессоре сигналов (5). Пусть сигнал суммарного канала поступает с первого выхода приемника (3) на первый вход процессора сигналов (5), а разностного азимутального канала со второго выхода приемника (3) на второй вход процессора сигналов (5). Процесс излучения/приема радиолокационного сигнала осуществляется в ходе сканирования лучом ДНА земной поверхности в заданном секторе обзора по закону, заданному процессором управления (4). По завершении сканирования завершается накопление сигнала в сигнальном процессоре (5) и запускается цифровая обработка радиолокационного сигнала.
Блок-схема алгоритма обработки сигнала приведен на Фиг. 2. В ходе сигнальной обработки осуществляется оценка фазового набега за период повторения принятого когерентного радиолокационного сигнала по суммарному каналу. Далее осуществляют компенсацию рассчитанного фазового набега в обоих каналах. Компенсация устраняет набег, вызванный нестабильностью приемного тракта и доплеровским сдвигом частоты принятого сигнала.
Принятый сигнал обладает модуляцией по частоте вызванной движением носителя БРЛС. Определяют значение крутизны этой частотной модуляции сигнала суммарного канала. Крутизна частотной модуляции позволяет разделить принятый сигнал на две составляющих - сигнал принятый слева от линии пути носителя БРЛС и сигнал принятый справа от линии пути носителя БРЛС. Для этого осуществляют гетеродинирование сигнала функцией с положительным значением крутизны и отрицательным значением крутизны. Примером такой функции может служить гармоническая функция с квадратичной зависимостью от времени


где S - крутизна частной модуляции, t - время.
Гетеродинированием сигнала функцией с положительной крутизной выделяют сигнал, накопленный справа относительно направления движения носителя, а с отрицательной крутизной - слева. Таким образом из одного массива сигналов выделяются два массива сигналов.
Указанному гетеродинированию подвергают сигналы суммарного и разностного азимутального каналов, и в результате формируется четыре массива сигналов.
Далее проводится спектральный анализ выделенных сигналов, например, посредством быстрого преобразования Фурье (БПФ). Таким образом, БПФ подвергают четыре массива отсчетов сигналов - накопленные с левой половины зоны обзора относительно направления движения носителя по суммарному каналу, по разностному азимутальному каналу, и с правой половины зоны обзора по суммарному каналу, по разностному азимутальному каналу. Полученные спектральным анализом массивы амплитуд левой и правой половин объединяются в один массив по каждому каналу.
Далее из массива амплитуд суммарного канала поэлементно вычитают массив амплитуд разностного азимутального канала. Данный массив амплитуд преобразовывается в радиолокационное изображение, например пересчетом амплитуд в значения яркости, и выводится на индикатор (6) для демонстрации летчику или оператору.
Применение совместной обработки сигналов суммарного и разностного азимутального каналов антенны позволяет сформировать РЛИ с повышенным разрешением по азимуту вблизи линии пути носителя по сравнению с прототипом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ картографирования земной поверхности бортовой радиолокационной станцией в переднем секторе обзора | 2017 |
|
RU2640406C1 |
| СПОСОБ КАРТОГРАФИРОВАНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ (БРЛС) | 2013 |
|
RU2529523C1 |
| Способ картографирования земной поверхности бортовой радиолокационной станцией с антенной решеткой | 2022 |
|
RU2798822C1 |
| Способ обнаружения наземных движущихся целей бортовой радиолокационной станцией | 2018 |
|
RU2691771C1 |
| Способ формирования радиолокационного изображения земной поверхности бортовой радиолокационной станцией | 2019 |
|
RU2717256C1 |
| Способ определения скорости и направления движения наземных объектов бортовой радиолокационной станцией с антенной решеткой | 2021 |
|
RU2786678C1 |
| Способ формирования радиолокационного изображения земной поверхности бортовой радиолокационной станцией | 2023 |
|
RU2806651C1 |
| СПОСОБ ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ПОВЕРХНОСТИ БОРТОВОЙ РЛС, УСТАНОВЛЕННОЙ НА ДВИЖУЩЕМСЯ ЛЕТАТЕЛЬНОМ АППАРАТЕ | 2013 |
|
RU2528169C1 |
| Способ обнаружения вертолетов бортовой радиолокационной станцией | 2018 |
|
RU2691387C1 |
| Способ формирования изображения поверхности в бортовой радиолокационной станции с синтезированием апертуры антенны с электронным управлением лучом | 2016 |
|
RU2617116C1 |

Изобретение относится к области радиолокации, в частности к радиолокационным станциям РЛС, устанавливаемым на летательных аппаратах, и предназначено для решения задач картографирования земной поверхности. Достигаемый технический результат - повышение разрешающей способности по азимуту вблизи линии пути носителя бортовым РЛС. Указанный результат достигается за счет того, что когерентно излучают и накапливают сигнал в процессе сканирования лучом диаграммы направленности антенны вблизи линии пути носителя радиолокационной станции, когда луч диаграммы направленности антенны, плавно перемещаясь, охватывает весь передний сектор, при этом когерентное накопление сигналов осуществляют по суммарному каналу и разностному азимутальному каналу антенны, затем осуществляют сигнальную обработку двух накопленных сигналов, заключающуюся в определении и компенсации фазового набега, определении крутизны частотной модуляции сигналов, выделении сигналов, накопленных слева и справа от линии пути носителя бортовой РЛС, спектральной обработке сигналов, объединении сигналов накопленных слева и справа от линии пути носителя, после формирования двух объединенных массивов амплитуд сигналов из массива амплитуд суммарного канала вычитают массив амплитуд разностного азимутального канала, а затем формируют радиолокационное изображение. 2 ил.
Способ картографирования земной поверхности бортовой радиолокационной станцией, заключающийся в том, что когерентно излучают и накапливают сигнал в процессе сканирования лучом диаграммы направленности антенны вблизи линии пути носителя радиолокационной станции, когда луч диаграммы направленности антенны, плавно перемещаясь, охватывает весь передний сектор, определяют фазовый набег за период повторения накопленного когерентного сигнала, компенсируют фазовый набег, определяют крутизну частотной модуляции накопленного сигнала, выделяют сигнал с положительной и отрицательной крутизнами частотной модуляции, соответствующим сигналам, принятым справа и слева относительно линии пути носителя бортовой радиолокационной станции, осуществляют спектральный анализ полученных сигналов, объединяют полученные спектральным анализом массивы амплитуд из двух сигналов в один массив амплитуд, отличающийся тем, что когерентное накопление сигналов осуществляют по суммарной и разностной азимутальной диаграммам направленности антенны, при этом фазовый набег за период повторения и крутизну частотной модуляции накопленных когерентных сигналов по суммарной и разностной азимутальной диаграммам направленности определяют только по сигналу, накопленному по суммарной диаграмме направленности, а компенсацию фазового набега, разделение сигналов принятых слева и справа от линии пути носителя бортовой радиолокационной станции, спектральный анализ и объединение массивов амплитуд осуществляют для сигналов, накопленных по суммарной и разностной азимутальной диаграммам направленности антенны, после формирования двух объединенных массивов амплитуд вычитают поэлементно массив амплитуд, сформированный из сигналов, накопленных по разностной азимутальной диаграмме направленности, из массива амплитуд, сформированного из сигналов, накопленных по суммарной диаграмме направленности, и формируют радиолокационное изображение.
| СПОСОБ КАРТОГРАФИРОВАНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ (БРЛС) | 2013 |
|
RU2529523C1 |
| АНТЕННА БОРТОВОГО РАДИОЛОКАТОРА | 2003 |
|
RU2260230C1 |
| СПОСОБ КОМПЕНСАЦИИ ФАЗОВЫХ НАБЕГОВ СИГНАЛА В БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ И БОРТОВАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2271019C1 |
| СПОСОБ ПОВЫШЕНИЯ РАЗРЕШАЮЩЕЙ СПОСОБНОСТИ ПО ДАЛЬНОСТИ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2015 |
|
RU2596229C1 |
| WO 2011001141 A, 24.02.2011 | |||
| US 8212717 B2, 03.07.2012 | |||
| US 7999726 B2, 16.08.2011. | |||

